
Abstract
In this article, we cover some soliton solutions and breathers for nonlinear Schrödinger equation with quadratic nonlinear susceptibility like that Breather lump wave solutions, Interaction between lump periodic and kink wave, lump soliton solution, Lump one kink solution, Lump two kink solution, multiwave solution, periodic cross kink solution, periodic cross lump wave solution, periodic wave solution and rogue wave solution. We also explore some rational solution such as M-shaped rational solutions, M-shaped rational solutions with one and two kink, kink cross rational solution and periodic cross rational solution. Also, we acquire homoclinic breather solution, M-shaped interaction with rogue and kink and M-shaped interaction with periodic and kink. Furthermore we also study the stability of our solutions. we also represents our solutions graphically such as 3D, 2D, contour, density plot and stream plot.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The nonlinear Schrödinger equation (NLSE) is essential for the improvement in optical communication system. From the mathematical perspective Schrödinger equation combines the characteristics of both parabolic and hyperbolic equations. The NLSE applied in many scientific fields to explain nonlinear physical characteristics also have applications in variety of fields including semiconductor manufacturing, biology, solid-state physics, condense matter physics, quantum chemistry, nonlinear optics, wave propagation, optical communication, protein folding and bending, nano-technology and industry (Ilhan et al. 2022; Li et al. 2022; Mohyaldeen et al. 2022; Yang et al. 2018). At the present time, the study of NLSE including analysis, numerics and applications becoming significant subject in computational and applied mathematics (Shen et al. 2021, 2022; Song et al. 2020; Guo et al. 2020). Some efficient ways for obtaining soliton solutions and optics have grabed the attention of many researchers because soliton theory is the fundamental and exciting topic in research (Rizvi et al. 2021, 2022a, b; Seadawy et al. 2021, 2022a, b, c, d; Batool et al. 2022; Ali et al. 2022; Ashraf et al. 2022).
In this paper, we will study NLSE-QNS given by Biswas et al. (2022):
where x and t represents the spatial and temporal variables respectively. The coefficients \(a_j\), \(b_j\), \(c_j\), \(d_j\), \(\alpha _j\) (\(j=1,2\)) are real valued constants. \(a_j\) are the coefficients of inter-modal dispersion. \(c_j\) depict the coefficient of chromatic dispersion, while \(d_j\) stands for the coefficient of spatio-temporal dispersion. And \(\alpha _j\) are the coefficient of QN. The function \(y=y(x,t\) and \(z=z(x,t)\) are complex valued function. The functions y represents the wave profile of the forward harmonic waves and z represents second harmonic waves. And \(y^*=y^*(x,t)\) is the conjugate of \(y=y(x,t)\).
2 LSS
By using following transformation, we obtain solution for LSS Biswas et al. (2022):
We have following bilinear form by putting Eq. (3) into Eq. (1),
For LS g and j are the following functions:
where
where \(k_i (1\le i\le 8)\) are real parameters. Insert Eq. (5) in to Eq. (4). We find some equations that provide coefficient values, including:
To obtain the LSS of Eq. (1), Insert Eq. (6) in to Eq. (5) and then in Eq. (3)
Now we represent some dynamical representation of solutions (Figs. 1 and 2):

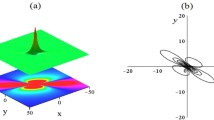
LS graphs of solution y(x, t) of Eq. (7) are shown as \(k_4=0.5, s=4, a_1=-7.\) a 3D plot, b 2D plot, c contour plot

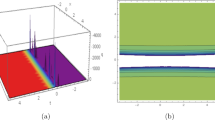
LS graphs of solution z(x, t) of Eq. (8) are shown as \(k_4=5, s=0.4, a_1=1.1.\)
3 LOKS
The LOKS’s solution, which contains the sum of the quadratic functions and an exponential functions, is obtain in this section for Eq. (1) We use the following function g and j Ren et al. (2019):
where
Inserting Eq. (9) in to Eq. (4). By inserting all the coefficient of the \(x, t, e^{4 r_1 x+4 r_2 t},e^{3 r_1 x+3 r_2 t},e^{2 r_1 x+2 r_2 t}, e^{r_1 x+r_2 t},y^*(x,t),y^*(x,t) e^{4 r_1 x+4 r_2 t},y^*(x,t) e^{3 r_1 x+3 r_2 t},y^*(x,t) e^{2 r_1x+2 r_2 t},y^*(x,t) e^{r_1 x+r_2 t}\) to be zero, we get algebraic expression that provide coefficient values as:
putting Eq. (10) in to Eq. (9) and then in Eq. (3) to get LOKS of Eq. (1),
where \(\Psi = -\frac{3 x \left( k_2^2-2 k_5^2\right) }{2 k_5 (3 a_1+2 b_1 d_1)}+k_5 t+k_6.\)
Now we represent some graphical representation of solutions (Figs. 3 and 4):

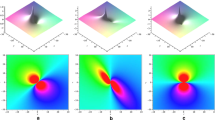
LOKS dynamical representation of solution y(x, t) of Eq. (11) are shown as \(a_1=1.5, b_1=7, d_1=0.9, k_2=0.5, k_5=0.2, k_6=-4, k_7=-2, n_1=2.2, s=0.05\)

LOKS graphical representation of solution z(x, t) of Eq. (12) are shown as \(a_1=1.5, b_1=7, d_1=0.9, k_2=0.5, k_5=0.2, k_6=-4, k_7=-2, k_8=-0.07, n_1=2.2, s=0.05\)
4 LTKS
The LTKS’s solution, which contains the sum of the quadratic functions and an exponential functions, is obtain in this section for Eq. (1). We use the following function g and j:
where
Putting Eq. (13) in to Eq. (4). By putting all the coefficient of the \(x, t, e^{r_1 x+r_2 t},e^{2 r_1 x+2 r_2 t},e^{3 r_1 x+3 r_2 t},e^{4 r_1 x+4 r_2 t},e^{r_3 x+r_4 t},e^{2 r_3 x+2 r_4 t},e^{3 r_3 x+3 r_4 t},e^{r_1 x+r_2 t+r_3 x+r_4 t},e^{2 r_1 x+2 r_2 t+r_3 x+r_4 t},e^{3 r_1 x+3 r_2 t+r_3 x+r_4 t}, e^{r_1 x+r_2 t+2 r_3 x+2 r_4 t},e^{2 r_1 x+2 r_2 t+2 r_3 x+2 r_4 t},e^{r_1 x+r_2 t+3 r_3 x+3 r_4 t},y^*(x,t) e^{r_1 x+r_2 t},y^*(x,t) e^{2 r_1 x+2 r_2 t}, y^*(x,t) e^{3 r_1 x+3 r_2 t}, y^*(x,t) e^{4 r_1 x+4 r_2 t},y^*(x,t) e^{r_3 x+r_4 t},y^*(x,t) e^{2 r_3 x+2 r_4 t},y^*(x,t) e^{3 r_3x+3 r_4 t},y^*(x,t) e^{r_1 x+r_2 t+r_3 x+r_4 t}, y^*(x,t) e^{2 r_1 x+2 r_2 t+r_3 x+r_4 t},y^*(x,t) e^{3 r_1 x+3 r_2 t+r_3 x+r_4 t},y^*(x,t) e^{r_1 x+r_2 t+2 r_3 x+2 r_4 t}, y^*(x,t) e^{2 r_1 x+2 r_2t+2 r_3 x+2 r_4 t}, y^*(x,t) e^{r_1 x+r_2 t+3 r_3 x+3 r_4 t}\) to be zero, we get algebraic expression that provide coefficient values as:
Insert Eq. (14) in to Eq. (13) and then in Eq. (3) to get the LTKS solution of Eq. (1),
where \(\Phi =n_1 r_1^2 e^{r_1 x+\frac{1}{2} i t (-4 b_1+i r_4)},\; \Pi =\left( k_4 x-\frac{2 k_4 t \left( 3 a_1 k_1^2+3 a_1 k_4^2+2 b_1 d_1 k_1^2+2 b_1 d_1 k_4^2\right) }{3 \left( k_1^2-2 k_4^2\right) }\right) ^2+\Phi +(k_1 x+k_3)^2+n_2 e^{r_4 t}.\) and
Now we have shown some graphical representation of above solutions (Figs. 5 and 6):

LTKS graphical representation of solution y(x, t) of Eq. (15) are shown as \(k_1=0.1, k_3=-5, k_4=-0.4, k_7=3.9,r_1=-0.2, r_4=3, b_1=1.5, a_1=-4, n_1=2.5,n_2=0.2, d_1=3.1, s=-0.2\)

LTKS graphical representation of solution z(x, t) of Eq. (16) are shown as \(k_1=1, k_3=5, k_4=0.4, k_7=3,r_1=0.2, r_4=0.3, b_1=5, a_1=4, n_1=2,n_2=0.6, d_1=3.5, s=2.\)
5 RWS
The RWS’s solution, which contains the sum of the quadratic functions and an exponential functions, is obtain in this section for Eq. (1) We use the following function g and j Ren et al. (2019):
where
Insert Eq. (17) in to Eq. (4). Inserting all coefficient of \(x, t, \cosh (r_1 x+r_2t),\cosh ^2(r_1 x+r_2t),\cosh ^3(r_1 x+r_2t),\cosh ^4(r_1 x+r_2t),\cosh ^5(r_1 x+r_2t),\cosh ^6(r_1 x+r_2t),\sinh (\text{( }r_1 x+r_2t),\sinh (r_1 x+r_2t) \cosh (r_1 x+r_2t),\sinh (r_1 x+r_2t) \cosh ^2(r_1 x+r_2t),\sinh (r_1 x+r_2t) \cosh ^3(r_1 x+r_2t),\sinh (r_1 x+r_2t) \cosh ^4(r_1 x+r_2t),\sinh (r_1 x+r_2t) \cosh ^5(r_1 x+r_2t),\sinh ^2(r_1 x+r_2t),\sinh ^2(r_1 x+r_2t) \cosh (r_1 x+r_2t),\sinh ^2(r_1 x+r_2t) \cosh ^2(r_1 x+r_2t),\sinh ^2(r_1 x+r_2t) \cosh ^3(r_1 x+r_2t),\sinh ^2(r_1 x+r_2t) \cosh ^4(r_1 x+r_2t),\sinh ^3(r_1 x+r_2t),\sinh ^3(r_1 x+r_2t) \cosh (r_1 x+r_2t),\sinh ^3(r_1 x+r_2t) \cosh ^2(r_1 x+r_2t),\sinh ^3(r_1 x+r_2t) \cosh ^3(r_1 x+r_2t),y^*(x,t),y^*(x,t) \cosh (r_1 x+r_2t),y^*(x,t) \cosh ^2(r_1 x+r_2t), y^*(x,t) \cosh ^3(r_1 x+r_2t),y^*(x,t) \cosh ^4(r_1 x+r_2t),y^*(x,t) \cosh ^5(r_1 x+r_2t),y^*(x,t) \cosh ^6(r_1 x+r_2t),y^*(x,t) \sinh (r_1 x+r_2t),y^*(x,t) \sinh (r_1 x+r_2t) \cosh (r_1 x+r_2t) t),y^*(x,t) \sinh (r_1 x+r_2t) \cosh ^2(r_1 x+r_2t),y^*(x,t) \sinh (r_1 x+r_2t) \cosh ^3(r_1 x+r_2t),y^*(x,t) \sinh (r_1 x+r_2t) \cosh ^4(r_1 x+r_2t),y^*(x,t) \sinh (r_1 x+r_2t) \cosh ^5(r_1 x+r_2t),y^*(x,t) \sinh ^2(r_1 x+r_2t),y^*(x,t) \sinh ^2(r_1 x+r_2t) \cosh (r_1 x+r_2t),y^*(x,t) \sinh ^2(r_1 x+r_2t) \cosh ^2(r_1 x+r_2t),y^*(x,t) \sinh ^2(r_1 x+r_2t) \cosh ^3(r_1 x+r_2t),y^*(x,t) \sinh ^2(r_1 x+r_2t) \cosh ^4(r_1 x+r_2t),y^*(x,t) \sinh ^3(r_1 x+r_2t),y^*(x,t) \sinh ^3(r_1 x+r_2t) \cosh (r_1 x+r_2t),y^*(x,t) \sinh ^3(r_1 x+r_2t) \cosh ^2(r_1 x+r_2t),y^*(x,t) \sinh ^3(r_1 x+r_2t) \cosh ^3(r_1 x+r_2t)\) to be zero, we get expression that provide coefficient values as:
Insert Eq. (18) in to Eq. (17) and then in Eq. (3) to have the RWS solution of Eq. (1),
where \(\Omega =r_2 t-\frac{2 d_1 r_2 x}{3 c_1}\) and \(\Upsilon =\left( k_3-\frac{3 i k_3 t (2a_1 d_1+3 c_1)}{4 d_1^2}\right) ^2+n_1 \cosh \left( \Omega \right) +k_4^2 x^2+k_8\).
Now we have given some graphical representation of these solutions (Figs. 7 and 8):

RWS graphical representation of solution y(x, t) of Eq. (19) are shown as \(k_3=0.5, k_4=7, r_2=0.1, c_1=5.5, a_1=0.06, n_1=4, d_1=1.3, s=2 .\)

RWS graphical representation of solution z(x, t) of Eq. (20) are shown as \(k_3=-0.5, k_4=7, k_8=0.8, r_2=-0.1, c_1=-5.5, a_1=0.06, n_1=0.04, d_1=1.3, s=-2 .\)
6 PWS
The PWS’s solution, which contains the sum of the quadratic functions and an exponential functions, is obtain in this section for Eq. (1). We use the following function g and j Ren et al. (2019):
Where
Put Eq. (21) into Eq. (4). The coefficient of \(x, t, \cos (r_1x+r_2 t),\cos ^2(r_1x+r_2 t),\cos ^3(r_1x+r_2 t),\cos ^4(r_1x+r_2 t),\cos ^5(r_1x+r_2 t),\cos ^6(r_1x+r_2 t),\sin (r_1x+r_2 t),\sin (r_1x+r_2 t) \cos (r_1x+r_2 t),\sin (r_1x+r_2 t) \cos ^2(r_1x+r_2 t),\sin (r_1x+r_2 t) \cos ^3(r_1x+r_2 t),\sin (r_1x+r_2 t) \cos ^4(r_1x+r_2 t),\sin (r_1x+r_2 t) \cos ^5(r_1x+r_2 t),\sin ^2(r_1x+r_2 t),\sin ^2(r_1x+r_2 t) \cos (r_1x+r_2 t),\sin ^2(r_1x+r_2 t) \cos ^2(r_1x+r_2 t),\sin ^2(r_1x+r_2 t) \cos ^3(r_1x+r_2 t),\sin ^2(r_1x+r_2 t) \cos ^4(r_1x+r_2 t),\sin ^3(r_1x+r_2 t),\sin ^3(r_1x+r_2 t) \cos (r_1x+r_2 t),\sin ^3(r_1x+r_2 t) \cos ^2(r_1x+r_2 t),\sin ^3(r_1x+r_2 t) \cos ^3(r_1x+r_2 t),y^*(x,t),y^*(x,t) \cos (r_1x+r_2 t),y^*(x,t) \cos ^2(r_1x+r_2 t),y^*(x,t) \cos ^3(r_1x+r_2 t),y^*(x,t) \cos ^4(r_1x+r_2 t),y^*(x,t) \sin (r_1x+r_2 t),y^*(x,t) \sin (r_1x+r_2 t) \cos (r_1x+r_2 t),y^*(x,t) \sin (r_1x+r_2 t) \cos ^2(r_1x+r_2 t),y^*(x,t) \sin (r_1x+r_2 t) \cos ^3(r_1x+r_2 t),y^*(x,t) \sin ^2(r_1x+r_2 t), y^*(x,t) \sin ^2(r_1x+r_2 t) \cos (r_1x+r_2 t),y^*(x,t) \sin ^2(r_1x+r_2 t) \cos ^2(r_1x+r_2 t)\) values of the parameters which are given below:
Insert Eq. (22) in to Eq. (21) and then in Eq. (3) to have the PWS solution of Eq. (1),
Now we have some graphical representation of these solutions (Figs. 9 and 10):

PWS graphical representation of solution y(x, t) of Eq. (23) are shown as \(k_2=1.3, k_5=0.5, r_2=0.05, n_1=6, a_1=1.5, s=0.1 .\)

PWS graphical representation of solution z(x, t) of Eq. (24) are shown as \(k_2=1.5, k_5=2.5, r_2=5, n_1=-6, a_1=1.5, s=0.1 .\)
7 PCKS
The PCKS’s solution, which contains the sum of the quadratic functions and an exponential functions, is obtain in this section for Eq. (1). We use the following function g and j:
Where
Put Eq. (25) into Eq. (4). We have values of the parameters which are given below:
Insert Eq. (26) into Eq. (25) and then in Eq. (3) to have the PCKS solution of Eq. (1),
where \(\Delta =\kappa _2 \cos \left( \frac{c_1k_4 t}{d_1}-k_4 x\right) -\frac{\kappa _2 k_{10}}{r_2}+e^{-k_2 t}+\kappa _3 \cosh (k_6 x),\) and \(\Delta _1=\kappa _2 k_4 \sin \left( \frac{c_1 k_4 t}{d_1}-k_4 x\right) +\kappa _3 k_6 \sinh (k_6 x)\) .
Now we get some dynamical representation of our solutions (Figs. 11 and 12):

PCKS graphical representation of solution y(x, t) of Eq. (27) are shown as \(k_2=5, k_4=0.2, k_{10}=0.7 r_2=3, c_1=0.5, d_1=1.3, s=-2 .\)

PCKS graphical representation of solution z(x, t) of Eq. (28) are shown as \(k_2=2, k_4=0.2, k_6=0.6, k_{10}=0.07, r_2=0.03, c_1=0.5, d_1=1.8, s=-5, \kappa _2=0.5, \kappa _3=4s .\)
8 PCLWS
The PCLWS’s solution, which contains the sum of the quadratic functions and an exponential functions, is obtain in this section for Eq. (1). We use the following function g and j:
Where
Put Eq. (25) into Eq. (4). We have values of the parameters which are given below:
Insert Eq. (30) into Eq. (29) and then in Eq. (3) to have the PCLWS solution of Eq. (1),
where \(\Xi =n_2 \cosh \left( r_4 t-\frac{d_1 r_4 x}{c_1}\right) +(k_1 x+k_3)^2+(k_4 x+k_5 t+k_6)^2+n_1 \cos (r_2 t)\) and \(\Sigma =\frac{d_1^2 n_2 r_4^2 \cosh \left( r_4 t-\frac{d_1 r_4 x}{c_1}\right) }{c_1^2}\).
Now we get some dynamical representation of our solutions (Figs. 13 and 14):

PCLWS graphical representation of solution y(x, t) of Eq. (31) are shown as \(k_1=1.1, k_3=0.3, k_4=-0.4, k_5=0.5, k_6=6.5, k_7=0.1, n_1=4.4, n_2=2.9, r_2=1.2, r_4=1.05, c_1=8.5, d_1=1.5, s=5 .\)

PCLWS graphical representation of solution z(x, t) of Eq. (32) are shown as \(k_1=-1, k_3=3.5, k_4=4, k_5=-5, k_6=0.6, k_7=-0.1, n_1=-4.4, n_2=2.9, r_2=-1.2, r_4=1, c_1=-5, d_1=1.5, s=5.\)
9 MWS
The MWS’s solution, which contains the sum of the quadratic functions and an exponential functions, is obtain in this section for Eq. (1). We use the following function g and j Seadawy et al. (2021):
Where
Put Eq. (33) into Eq. (4). We have values of the parameters which are given below:
Insert Eq. (34) into Eq. (33) and then in Eq. (3) to have the MWS solution of Eq. (1),
where \(\xi =r_2 \cosh (k_9)-\frac{2 \kappa _1 r_2 \left( b_1+2 c_1k_4^2+2 d_1k_4 k_5\right) \cos (k_4 x+k_5 t)}{\kappa _2 \left( 2 b_1+c_1k_4^2+d_1k_4 k_5\right) }\).
Now we get some dynamical representation of our solutions (Figs. 15 and 16):

MWS graphical representation of solution y(x, t) of Eq. (35) are shown as \(k_4=-0.2, k_5=1.3, k_9=0.05, k_{10}=0.1, s=5, \kappa _0=2.5, \kappa _1=1.9, \kappa _2=3.5 .\)

MWS graphical representation of solution z(x, t) of Eq. (36) are shown as \(k_4=-0.2, k_5=1.5, k_9=0.05, k_{10}=0.1, s=5, \kappa _0=2.5, \kappa _1=1.9, \kappa _2=3.5, b_1=5, d_1=4.5, c_1=3, r_2=2 .\)
10 LPKW
The LPKW’s solution, which contains the sum of the quadratic functions and an exponential functions, is obtain in this section for Eq. (1). We use the following function g and j Ren et al. (2019):
where
Put Eq. (37) into Eq. (4). We have values of the parameters which are given below:
Insert Eq. (38) into Eq. (37) and then in Eq. (3) to have the LPKW solution of Eq. (1),
where \(\theta =m_1 x+m_2 t\) and \(\varrho =k_3^2+(k_4 x+k_5 t)^2+n_2 \cos (\theta )+n_1 e^{r_1 x+r_2 t}\).
Now we get some dynamical representation of our solutions (Figs. 17 and 18):

LPKW graphical representation of solution y(x, t) of Eq. (39) are shown as \(k_3=-0.9, k_4=10, k_5=1.1, s=0.5, r_1=3, r_2=0.3, n_1=5, n_2=0.8, m_1=2.5, m_2=4 .\)

LPKW graphical representation of solution z(x, t) of Eq. (40) are shown as \(k_3=-0.9, k_4=10, k_5=-1.1, s=0.5, r_1=3, r_2=-0.3, n_1=5, n_2=-0.8, m_1=2.5, m_2=-4 .\)
11 BLWS
The BLWS’s solution, which contains the sum of the quadratic functions and an exponential functions, is obtain in this section for Eq. (1). We use the following function g and j Seadawy et al. (2021):
where
Put Eq. (41) into Eq. (4). We have values of the parameters which are given below:
Insert Eq. (42) into Eq. (41) and then in Eq. (3) to have the BLWS solution of Eq. (1),
where \(\varphi =h_1 \left( k_5 t-\frac{d_1 k_5 x}{c_1}\right)\) .
Now we get some dynamical representation of our solutions (Figs. 19 and 20):

BLWS graphical representation of solution y(x, t) of Eq. (43) are shown as \(k_2=-0.5, k_3=7, k_5=0.05, k_6=0.7, s=0.2, d_1=5, h=0.1, h_1=0.3, n_1=2, n_2=3, c_1=0.5.\)

BLWS graphical representation of solution z(x, t) of Eq. (44) are shown as \(k_2=0.7, k_3=0.7, k_5=5, k_6=7, k_7=-0.8, s=0.5, d_1=-3, h=0.01, h_1=0.5, n_1=0.2, n_2=0.03, c_1=6.\)
12 Traveling wave transformation (TWT)
To solve Eqs. (1) and (2), the TWT are formed as Biswas et al. (2022),
\(Y_{j}(\nu )\) for j=1,2 are components of amplitude and wave variables is
where \(\psi\) and q are the real-valued constants that symbolize the soliton width and velocity, and the phase components are given as
where p, v and \(\phi\) are the real-valued constants that represents the soliton frequency, soliton wave number and phase constant respectively.
Next By putting Eqs. (45) and (46) in Eqs. (1) and (2) we have the real and imaginary parts are
Equations (49)–(52) shorten to ordinary differential equation by using balancing rule
with velocity
and constraints are
Now we apply the transformation below for variety of rational solutions
Eq. (56) is inserted into Eq. (51) to generate the following bilinear form,
The remaining part of the paper is structured as following:
13 MSRS
For solving MSRS we use the following transformation (Ashraf et al. 2022),
inserting Eq. (58) into Eq. (57) and we have some values of parameters
For MSRS of Eqs. (45) and (46) substitute Eq. (59) into Eq. (58) and then put in Eq. (56),
where \(\beta = \left( u_4^2+u_5\right) ^2 \left( a p+2 c p^2-2 d p v+v\right) ^2\), \(\gamma =x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\), \(\delta =a p u_4^2+a p u_5+2 c p^2 u_4^2+2 c p^2 u_5-2 d p u_4^2 v-2 d p u_5 v+u_4^2 v+u_5 v\), \(\tau =x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\) and \(\varpi =u_4-\frac{\psi \left( \delta \right) \tau }{2 \alpha u_4}\).
14 MSR1K
For solving MSR1K we use the following transformation (Ashraf et al. 2022),
inserting Eq. (62) into Eq. (57) and we have some values of parameters
For MSR1K of Eqs. (45) and (46) substitute Eq. (63) into Eq. (62) and then put in Eq. (56),
15 MSR2K
For solving MSR2K we use the following transformation (Ashraf et al. 2022),
inserting Eq. (66) into Eq. (57) and we have some values of parameters
For MSR2K of Eqs. (45) and (46) substitute Eq. (66) into Eq. (67) and then put in Eq. (56),
where \(\varepsilon =u_4-\frac{3 u_4 \psi \left( a p+2 c p^2-2 d p v+v\right) \left( x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\right) }{2 \alpha }\).
16 HBS
For solving HBS we use the following transformation (Ahmed et al. 2019b),
inserting Eq. (70) into Eq. (57) and we have some values of parameters
For HBS of Eqs. (45) and (46) substitute Eq. (71) into Eq. (70) and then put in Eq. (56),
17 PCRS
For solving PCRS we use the following transformation (Ahmed et al. 2019a),
inserting Eq. (74) into Eq. (57) and we have some values of parameters:
For PCRS of Eqs. (45) and (46) substitute Eq. (75) into Eq. (74) and then put in Eq. (56),
where \(\theta =\sqrt{\frac{2 a d p^2-a p+4 c d p^3-2 c p^2-4 d^2 p^2 v+4 d p v-v}{2 c d p+c-2 d^2 v+d \eta }} \left( x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\right) +w_4\) and \(\rho =\frac{3 u_3 \psi ^2 \left( 2 c d p+c-2 d^2 v+d \eta \right) }{4 \alpha (2 d p-1)}+u_3 \psi \left( x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\right)\) and \(\Omega =w_1 \psi \left( x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\right) +w_2\).
18 KCRS
For solving KCRS we use the following transformation (Ahmed et al. 2019a, b),
inserting Eq. (78) into Eq. (57) and we have some values of parameters
For KCRS of Eqs. (45) and (46) substitute Eq. (79) into Eq. (78) and then put in Eq. (56),
19 MSPK
For solving MSPK we use the following transformation (Ahmed et al. 2019b),
inserting Eq. (82) into Eq. (57) and we have some values of parameters:
For MSPK of Eqs. (45) and (46) substitute Eq. (83) into Eq. (82) and then put in Eq. (56),
where \(\xi =\sqrt{\frac{-2 a d p^2+a p-4 c d p^3+2 c p^2+4 d^2 p^2 v-4 d p v+v}{2 c d p+c-2 d^2 v+d \eta }} \left( x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\right) +w_2\) and
\(\Gamma =-\frac{z_1 \sqrt{\frac{-2 a d p^2+a p-4 c d p^3+2 c p^2+4 d^2 p^2 v-4 d p v+v}{2 c d p+c-2 d^2 v+d \eta }} \sin \left( \xi \right) }{\psi }\) and \(\Theta =w_3 \psi \left( x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\right) +w_4+u_2^2+u_5\).
20 MSRK
For solving MSRK we use the following transformation (Seadawy et al. 2021; Manafian et al. 2020),
inserting Eq. (86) into Eq. (57) and we have some values of parameters:
For MSRK of Eqs. (45) and (46) insert Eq. (87) into Eq. (86) and then put in Eq. (56),
where \(\Phi =\sqrt{\frac{2 a d p^2-a p+4 c d p^3-2 c p^2-4 d^2 p^2 v+4 d p v-v}{2 c d p+c-2 d^2 v+d \eta }} \left( x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\right) +w_2\), \(\Delta =\frac{3 u_3 \psi ^2 \left( 2 c d p+c-2 d^2 v+d \eta \right) }{4 \alpha (2 d p-1)}+u_3 \psi \left( x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\right)\) and \(\omega =w_3 \psi \left( x-\frac{t (4 c p-2 d v+\eta )}{2 d p-1}\right) +w_4\).
21 Stability
Now using Hamiltonian method \(\Gamma\) framework, we examine the stability (Khater 2019),
Now we verify the stability as
where \(\Gamma _j\) (j=1,2) and c represented as momentum and velocity respectively (Figs. 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31,32, 33,34, 35 and 36). Hamiltonian system provides the stability condition, all solutions we got through this condition is given by (Table 1), ,

Graphical representation of solution \(y_{1}(x,t)\) in Eq. (60) are presented via \(a=2, \alpha =0.8, c=0.01, d=-4, \eta =2, p=5, u=2, u_2=0.06, u_3=-0.03, u_4=-0.9, u_5=5, v=0.3, w_2=5, w_3=3, w_4=-7, \psi =8, z_1=0.9, z_2=-5, \phi =0.5\), (a) 3D plot (b) 2D plot (c) density plot and (d) stream plot respectively

Graphical representation of solution \(z_{1}(x,t)\) in Eq. (61) are presented via \(a=2, \alpha =0.8, c=0.01, d=-4, \eta =2, p=5, u=2, u_2=0.06, u_3=-0.03, u_4=-0.9, u_5=5, v=0.3, w_2=5, w_3=3, w_4=-7, \psi =8, z_1=0.9, z_2=-5, \phi =0.5\)

Graphical representation of solution \(y_{2}(x,t)\) in Eq. (64) are presented via \(a=-2, \alpha =-0.2, c=10, d=0.4, \eta =5, p=1.5, u=-2, u_2=0.6, u_3=-3, u_4=1.9, u_5=-0.5, v=-3, w_2=1.5, w_3=0.03, w_4=-0.7, \psi =-0.8, z_1=-0.1, z_2=5, \phi =15\)

Graphical representation of solution \(z_{2}(x,t)\) in Eq. (65) are presented via \(a=-2, \alpha =-0.2, c=10, d=0.4, \eta =5, p=1.5, u=-2, u_2=0.6, u_3=-3, u_4=1.9, u_5=-0.5, v=-3, w_2=1.5, w_3=0.03, w_4=-0.7, \psi =-0.8, z_1=-0.1, z_2=5, \phi =15\)

Graphical representation of solution \(y_{3}(x,t)\) in Eq. (68) are presented via \(a=-2.4, \alpha =-0.2, c=1.7, d=2.4, \eta =5.5, p=6.5, u=2.5, u_2=-0.6, u_3=-0.03, u_4=-1.9, u_5=0.5, v=-3.9, w_1=0.4, w_2=1.05, w_3=3.7, w_4=0.7, \psi =0.08, z_1=0.01, z_2=-3, \phi =1.05\)

Graphical representation of solution \(z_{3}(x,t)\) in Eq. (69) are presented via \(a=-2.4, \alpha =-0.2, c=1.7, d=2.4, \eta =5.5, p=6.5, u=2.5, u_2=-0.6, u_3=-0.03, u_4=-1.9, u_5=0.5, v=-3.9, w_1=0.4, w_2=1.05, w_3=3.7, w_4=0.7, \psi =0.08, z_1=0.01, z_2=-3, \phi =1.05\)

Graphical representation of solution \(y_{4}(x,t)\) in Eq. (72) are presented via \(a=5, \alpha =-0.5, c=0.3, d=2, p=3, v=0.5, \phi =0.2\)

Graphical representation of solution \(z_{4}(x,t)\) in Eq. (73) are presented via \(a=5, \alpha =-0.5, c=0.3, d=2, p=3, v=0.5, \phi =0.2\)

Graphical representation of solution \(y_{5}(x,t)\) in Eq. (77) are presented via \(u_5=7.5, a=4, \alpha =-0.2, c=-6.7, d=2.5, \eta =-5.5, p=-5, u=2, u_2=-0.06, u_3=-3, u_4=-1, v=0.09, w_1=4, w_2=7, w_3=3.7, w_4=-0.7, \psi =8, z_1=-1, z_2=3, \phi =5\)

Graphical representation of solution \(z_{5}(x,t)\) in Eq. (77) are presented via \(u_5=7.5, a=4, \alpha =-0.2, c=-6.7, d=2.5, \eta =-5.5, p=-5, u=2, u_2=-0.06, u_3=-3, u_4=-1, v=0.09, w_1=4, w_2=7, w_3=3.7, w_4=-0.7, \psi =8, z_1=-1, z_2=3, \phi =5\)

Graphical representation of solution \(y_{6}(x,t)\) in Eq. (80) are presented via \(a=0.5, alpha =0.08, c=0.2, d=-0.4, \eta =0.2, p=0.5, u=-2, u_2=0.6, u_4=-0.4, v=-0.3, w_2=7, \psi =-0.5, z_1=0.9, \phi =3\)

Graphical representation of solution \(z_{6}(x,t)\) in Eq. (81) are presented via \(a=0.5, alpha =0.08, c=0.2, d=-0.4, \eta =0.2, p=0.5, u=-2, u_2=0.6, u_4=-0.4, v=-0.3, w_2=7, \psi =-0.5, z_1=0.9, \phi =3\)

Graphical representation of solution \(y_{7}(x,t)\) in Eq. (84) are presented via \(a=0.5, \alpha =8, c=0.2, d=0.4, \eta =-2, p=-3, u=-2, u_2=-0.6, u_3=-0.3, u_4=0.7, u_5=-8, v=-3, w_2=5, w_3=-0.3, w_4=-7, \psi =-0.5, z_1=-0.9, z_2=-5, \phi =5\)

Graphical representation of solution \(z_{7}(x,t)\) in Eq. (85) are presented via \(a=0.5, \alpha =8, c=0.2, d=0.4, \eta =-2, p=-3, u=-2, u_2=-0.6, u_3=-0.3, u_4=0.7, u_5=-8, v=-3, w_2=5, w_3=-0.3, w_4=-7, \psi =-0.5, z_1=-0.9, z_2=-5, \phi =5\)

Graphical representation of solution \(y_{8}(x,t)\) in Eq. (88) are presented via \(a=-0.5, \alpha =8, c=0.2, d=0.4, \eta =-2, p=5, u=-2, u_2=0.6, u_3=-0.3, u_4=0.4, u_5=8, v=0.3, w_2=5, w_3=0.3, w_4=7, \psi =-0.5, z_1=-0.9, z_2=-5, \phi =3\)

Graphical representation of solution \(z_{8}(x,t)\) in Eq. (89) are presented via \(a=-0.5, \alpha =8, c=0.2, d=0.4, \eta =-2, p=5, u=-2, u_2=0.6, u_3=-0.3, u_4=0.4, u_5=8, v=0.3, w_2=5, w_3=0.3, w_4=7, \psi =-0.5, z_1=-0.9, z_2=-5, \phi =3\)
22 Results and discussion
By establishing the proper values for the parameters, we were able to successfully generate the desired type of solutions which express wave discrepancy. Take note of Figs. 1 and 2 which presents bright soliton solution for Eq. (7–8) by using appropriate values for parameters. In Figs. (a) 3D plot (b) 2D plot and (c) contour plot respectively. We get some multiple bright soliton graph for Eq. (11-12) by using the values \(a_1=1.5, b_1=7, d_1=0.9, k_2=0.5, k_5=0.2, k_6=-4, k_7=-2, n_1=2.2, s=0.05\) in Figs. 3 and 4. The geometrical structures of lump wave soliton solutions are presented in Figs. 4, 5, 6, 7, 8, 9 and 10 for various values for parameters. Figures 13, 14, 15, 16, 17, 18, 19 and 20 shows kink type LSS for different values of parameters. We have computed M-shaped graphs for \(y_1(x,t)\) and \(z_1(x,t)\) with values \(a=2, \alpha =0.8, c=0.01, d=-4, \eta =2, p=5, u=2, u_2=0.06, u_3=-0.03, u_4=-0.9, u_5=5, v=0.3, w_2=5, w_3=3, w_4=-7, \psi =8, z_1=0.9, z_2=-5, \phi =0.5\) in Figs. 21 and 22, (a) 3D plot (b) 2D plot (c) density plot and (d) stream plot respectively. Figures 23 and 24 represented graph of M-shaped with one and two kinks. We have attained the breather for \(y_4(x,t)\) and \(z_4(x,t)\) with values \(a=5, \alpha =-0.5, c=0.3, d=2, p=3, v=0.5, \phi =0.2\) in Figs. 27 and 28. We also obtained some M-shaped interaction with periodic, rogue and kink profiles are presented in Figs. 29, 30, 31, 32, 33, 34, 35 and 36.
23 Conclusion
In this paper, we explored distinct solutions for NLSE-QNS such as multi, rogue and periodic waves. we have investigated lump with kink, lump periodic and kink, breather lump, homoclinic breather. We also categorised MSRS, MSRS with one and two kink, HBS, PCRS, KCRS, MSPK and MSRK. Additionally, we also manipulated their stability. We discovered by HS properties that \(y_i(x,y)\), \(z_j(x,y)\) where (\(i=2,4,7\)) and (\(j=1,2\)) to be stable solutions.
Availability of data and materials
Not applicable.
References
Ahmed, I., Seadawy, A. R., Lu, D.: M-shaped rational solitons and their interaction with kink waves in the Fokas–Lenells equation. Physica Scripta 94, 055205 (2019)
Ahmed, I., Seadawy, A.R., Lu, D.: Kinky breathers, W-shaped and multi-peak solitons interaction in \((2+ 1)\)-dimensional nonlinear Schrödinger equation with Kerr law of nonlinearity. Eur. Phys. J. Plus 134(3), 1–10 (2019)
Ali, K., Seadawy, A.R., Ahmad, S., Rizvi, S.T.R.: Discussion on rational solutions for Nematicons in liquid crystal with Kerr law. Chaos Solitons Fract. 160, 112218 (2022)
Ashraf, F., Seadawy, A.R., Rizvi, S.T.R., Ali, K., Ashraf, M.A.: Multi-wave, M-shaped rational and interaction solutions for fractional nonlinear electrical transmission line equation. J. Geom. Phys. 177, 104503 (2022)
Batool, T., Rizvi, S.T.R., Seadawy, A.R.: Multiple breathers and rational solutions to Ito integro-differential equation arising in shallow water waves. J. Geom. Phys. 178, 104540 (2022)
Biswas, A., Ekici, M., Khan, S., Triki, H., Moraru, L., Alzahrani, A.K.: Embedded solitons with \(\chi ^{({2})}\) nonliniearity susceptibility. Scientia Iranica (2022). https://doi.org/10.24200/SCI.2022.55560.4276
Guo, J.-L., Yang, Z.-J., Song, L.-M., Pang, Z.-G.: Propagation dynamics of tripole breathers in nonlocal nonlinear media. Nonlinear Dyn. 101, 1147–1157 (2020)
Ilhan, V., Manafian, J., Lakestani, M., Singh, G.: Some novel optical solutions to the perturbed nonlinear Schrödinger model arising in nano-fibers mechanical systems. Mod. Phys. Lett. B 36(03), 2150551 (2022)
Khater, A.H.: Computational simulations. Propagation behavior of the Riemann wave interacting with the long wave. Ocean Eng. 153, 281–296 (2019)
Li, X., Manafian, J., Abotaleb, M., Ilhan, O., Oudah, A.Y., Prakaash, A.S.: Novel optical soliton waves in metamaterials with parabolic law of nonlinearity via the IEFM and ISEM. J. Funct. Spaces 2022, 1 (2022). https://doi.org/10.1155/2022/1351377
Manafian, J., Ivatloo, M., Abapour, B.M.: Breather wave, periodic, and cross-kink solutions to the generalized Bogoyavlensky–Konopelchenko equation. Math. Methods. Appl. Sci. 43(4), 1753–1774 (2020)
Mohyaldeen, S.Y., Manafian, J., Ilhan, O.A., Abotaleb, M., Hajar, A.: Periodic and breather solutions for miscellaneous soliton in metamaterials model by computational schemes. Int. J. Geom. Methods Mod. Phys. 19(12), 2250196 (2022)
Ren, B., Lin, J., Lou, Z.M.: A new nonlinear equation with lump-soliton, lump-periodic, and lump-periodic-soliton solutions. Complexity 2019, 1–10 (2019)
Rizvi, S.T.R., Seadawy, A.R., Ahmed, S., Younis, M., Ali, K.: Study of multiple lump and rogue waves to the generalized unstable space time fractional nonlinear Schrödinger equation. Chaos Solitons Fract. 151, 111251 (2021)
Rizvi, S.T.R., Seadawy, A.R., Raza, U.: Detailed analysis for chirped pulses to cubic-quintic nonlinear non-paraxial pulse propagation model. J. Geom. Phys. 178, 104561 (2022)
Rizvi, S.T.R., Seadawy, A.R., Farrah, N., Ahmad, S.: Application of Hirota operators for controlling soliton interactions for Bose-Einstien condensate and quintic derivative nonlinear Schrödinger equation. Chaos Solitons Fract. 159, 112128 (2022)
Seadawy, A.R., Bilal, M., Younis, M., Rizvi, S.T.R., Althobaiti, S., Makhlouf, M.M.: Analytical mathematical approaches for the double chain model of DNA by a novel computational technique. Chaos Solitons Fract. 144, 110669 (2021)
Seadawy, A.R., Rizvi, S.T.R., Ahmad, S., Younis, M., Baleanu, D.: Lump, lump-one stripe, multiwave and breather solutions for the Hunter–Saxton equation. Open Phys. 19(1), 1–10 (2021)
Seadawy, A.R., Rizvi, S.T.R., Ashraf, M.A., Younis, M., Hanif, M.: Rational solutions and their interactions with kink and periodic waves for a nonlinear dynamical phenomenon. Int. J. Mod. Phys. B 35, 2150236 (2021)
Seadawy, A.R., Ahmad, S., Rizvi, S.T.R., Ali, K.: Various forms of lumps and interaction solutions to generalized Vakhnenko Parkes equation arising from high-frequency wave propagation in electromagnetic physics. J. Geom. Phys. 176, 104507 (2022)
Seadawy, A.R., Rizvi, S.T.R., Mustafa, B., Ali, K., Althubiti, S.: Chirped periodic waves for an cubic quintic nonlinear Schrödinger equation with self steepening and higher order nonlinearities. Chaos Solitons Fract. 156, 111804 (2022)
Seadawy, A.R., Younis, M., Baber, M.Z., Iqbal, M.S., Rizvi, S.T.R.: Nonlinear acoustic wave structures to the Zabolotskaya Khokholov dynamical model. J. Geom. Phys. 175, 104474 (2022)
Seadawy, A.R., Akram, U., Rizvi, S.T.R.: Dispersive optical solitons along with integrability test and one soliton transformation for saturable cubic-quintic nonlinear media with nonlinear dispersion. J. Geom. Phys. 177, 104521 (2022)
Shen, S., Yang, Z., Li, X., Zhang, S.: Periodic propagation of complex-valued hyperbolic-cosine-Gaussian solitons and breathers with complicated light field structure in strongly nonlocal nonlinear media. Commun. Nonlinear Sci. Numer. Simul. 103, 106005 (2021)
Shen, S., Yang, Z.-J., Pang, Z.-G., Ge, Y.-R.: The complex-valued astigmatic cosine-Gaussian soliton solution of the nonlocal nonlinear Schrödinger equation and its transmission characteristics. Appl. Math. Lett. 125, 107755 (2022)
Song, L.-M., Yang, Z.-J., Li, X.-L., Zhang, S.-M.: Coherent superposition propagation of Laguerre–Gaussian and Hermite-Gaussian solitons. Appl. Math. Lett. 102, 106114 (2020)
Wang, M., Zhou, Y., Li, Z.: Application of a homogeneous balance method to exact solutions of nonlinear equations in mathematical physics. Phys. Lett. A 216, 67–75 (1996)
Yang, J.Y., Ma, W.X., Qin, Z.: Lump and lump-soliton solutions to the (2+1)-dimensional Ito equation. Anal. Math. Phys. 8(3), 427–436 (2018)
Yang, Z.-J., Zhang, S.-M., Li, X.-L., Pang, Z.-G., Hong-Xia, B.: High-order revivable complex-valued hyperbolic-sine-Gaussian solitons and breathers in nonlinear media with a spatial nonlocality. Nonlinear Dyn. 94, 2563–2573 (2018)
Funding
Not applicable.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Ethical approval
I hereby declare that this manuscript is the result of my independent creation under the reviewers’ comments. Except for the quoted contents, this manuscript does not contain any research achievements that have been published or written by other individuals or groups.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Rizvi, S.T.R., Seadawy, A.R., Ahmed, S. et al. Optical soliton solutions and various breathers lump interaction solutions with periodic wave for nonlinear Schrödinger equation with quadratic nonlinear susceptibility. Opt Quant Electron 55, 286 (2023). https://doi.org/10.1007/s11082-022-04402-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-022-04402-3