
Abstract
We propose a third-order numerical integrator based on the Neumann series and the Filon quadrature, designed mainly for highly oscillatory partial differential equations. The method can be applied to equations that exhibit small or moderate oscillations; however, counter-intuitively, large oscillations increase the accuracy of the scheme. With the proposed approach, the convergence order of the method can be easily improved. Error analysis of the method is also performed. We consider linear evolution equations involving first- and second-time derivatives that feature elliptic differential operators, such as the heat equation or the wave equation. Numerical experiments consider the case in which the space dimension is greater than one and confirm the theoretical study.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
We consider the following type of highly oscillatory partial differential equations
with zero boundary conditions, where \(\Omega \) is an open and bounded subset of \(\mathbb {R}^m\) with smooth boundary \(\partial \Omega \), \(t^\star >0\) and \(\mathcal {L}\) is a linear differential operator of degree 2p, \(p\in \mathbb {N}\), defined on \(\Omega \)
Multi-index \(\varvec{p}\) is an m-tuple of nonnegative integers \(\varvec{p} = (p_1,p_2,\dots ,p_m)\) and \(a_{\varvec{p}}(x)\) are smooth, complex-valued functions of \(x \in \bar{\Omega }\). We assume that function f(x, t) from the equation (1) is a highly oscillatory of type
where \(\alpha _n\) are sufficiently smooth, complex-valued functions. The aim of this paper is to construct a numerical integrator designed for highly oscillatory equations of type (1).
Highly oscillatory differential equations are difficult to solve numerically and are of great importance in computational mathematics, which is why they have gained special attention in the field [10, 11], and references therein. In particular, differential equations of type (1) with extrinsic high oscillations arise in various fields, including electronic engineering [5], when computing scattering frequencies [6], and in quantum mechanics [7, 13]. In addition to the previously mentioned works, computational methods dedicated to equations of type (1) are presented for example in [1, 2, 4, 15, 21]. In this paper, we present a complementary approach as discussed in the aforementioned papers. Given the generality of equations (1), the numerical scheme derived in this manuscript can be effectively applied to a range of linear partial differential equations, including the heat equation and the wave equation.
In traditional numerical methods applied to highly oscillating problems, it is typically a requirement that the time step h satisfies \(h\omega < 1\). This causes the method to become extremely expensive when \(\omega \) is large. This occurs because conventional schemes are constructed using Taylor expansions, where error formulas involve expressions with high derivatives of a highly oscillatory function. On the other hand, methods for highly oscillatory equations based on the Modulated Fourier expansion or the asymptotic expansion may not converge to a solution, rendering them effective only for equations with large oscillatory parameter \(\omega \). In this paper, we propose a third-order method whose accuracy improves with increasing parameter \(\omega \) and decreasing time step h. Furthermore, the approach presented in this paper allows for easy improvement of the convergence order of the proposed numerical integrator.
To provide a more detailed understanding of the challenges associated with the numerical approximation of highly oscillating differential equations, let us apply Duhamel’s formula to equation (1) and write it in the following integral form
where \(u_0\) and \(f(s), \ u(s)\) for fixed s are elements of the appropriate Banach spaces. Let us note that the second time derivative of the solution to equation (1) satisfies
therefore \(u''(t) = \mathcal {O}(\omega )\) and furthermore \(u^{(k)}(t) = \mathcal {O}(\omega ^{k-1})\). This implies that approximating the integral from equation (4) using standard quadrature rules, as in basic numerical schemes, leads to a significant error. For that reason, we use a different approach to this issue. In paper [18], it was shown that the solution to equation (1) can be presented as the Neumann series. Subsequently, by expanding asymptotically each integral within the Neumann series, it was demonstrated that the solution of the equation can be expressed as the Modulated Fourier expansion. The Modulated Fourier expansion, also known as an asymptotic expansion or frequency expansion, is a technique used for analyzing highly oscillatory problems. It is comprehensively and thoroughly described in [10]. By representing the solution as the Neumann series, the time derivatives of the solution, which can be large for highly oscillating equations, do not appear in the error formula of the numerical scheme. In this paper, instead of employing an asymptotic expansion for the integrals within the Neumann series (which is effective only in cases of high oscillations), we approximate them using quadrature rules designed for highly oscillatory integrals, such as Filon-type methods. By this approach, we can provide that the local error of the presented numerical scheme can be estimated by \(Ch^4\), where constant C is independent of time step h and parameter \(\omega \). Furthermore, when considering a potential function f with only positive frequencies, i.e. when only numbers \(n>0\) appear in formula (3), one can show that the local error is bounded by \(C\min \left\{ h^4, h^2\omega ^{-2}, \omega ^{-3}\right\} \), where again the constant C is independent of both h and \(\omega \).
The convergence rate of the method can be easily improved by approximating a greater number of integrals from the Neumann series. However, this enhancement comes at the cost of requiring better regularity for both the initial condition \(u_0\) and the functions \(\alpha _n\), and also leads to increased computational complexity.
The paper is organized as follows. In Section 2, we introduce the two fundamental ingredients of the proposed method – the Neumann series and the Filon method. Section 3 provides the derivation of the proposed numerical integrator. Section 4 is dedicated to the error analysis of the method. In Section 5, we demonstrate the application of the scheme to equations involving a second time derivative, while Section 6 presents the results of numerical experiments.
2 Preliminaries
In this section, we briefly introduce the basic tools needed to build the proposed numerical method: the Neumann series and the Filon method.
2.1 The Neumann series
Let us consider the following ordinary differential equation
where \(Y: \mathbb {R} \rightarrow \mathbb {C}^n\) and A(t) is an \(n \times n\) time-dependent matrix. Equation 5 can be written in the following form
By iterating equation (6), one can show that the solution of the problem (6) is given by the series
where
The series (7) is known as the Neumann series and the Dyson series [12], and it converges to the solution of equation (6) for all values of t provided that the matrix A(t) is bounded [3].
2.2 The Filon method
The Filon method is a quadrature rule designed for highly oscillatory integrals. Suppose we wish to approximate the following integral
where h and g are real-valued, sufficiently smooth functions, \(h\ne 0\) in [a, b] and \(\omega \gg 1\). Numerical approximation of such integrals by standard methods based on the Taylor expansion leads to a significant error. Consider the Hermite interpolation polynomial p that approximates the function h, \(p(s)\approx h(s)\). Let p satisfy the following conditions
We assume that the moments
can be calculated explicitly. The Filon method reads
The Filon method is very effective in the approximation of highly oscillatory integrals. Additionally, for small values of \(\omega \), it behaves similarly to standard quadrature rules.
Filon method may be used in approximation of multivariate highly oscillatory integrals. Various modifications of the Filon quadrature are possible; see, for example, [8].
3 Derivation of the method
For the convenience of presenting the method, we introduce the necessary notation and make the following general assumption, which will be used throughout the paper.
Notation
By \( H^{2p}(\Omega ) =W^{2p,2}(\Omega ) \), where p is a nonnegative integer, we understand the Sobolev space equipped with standard norm \(\Vert \ \ \Vert _{H^{2p}(\Omega )}\), and \(H^{p}_0(\Omega )\) is the closure of \(C_0^{\infty }(\Omega )\) in the space \(H^p(\Omega )\). By \(u[t](\tau )\) we understand function u such that \(u[t](\tau ) = u(t+\tau )\). We slightly abuse the notation and also denote \(u(t):=u( \cdot ,t)\) as an element of an appropriate Banach space. Throughout the text, by \(\Vert \ \ \Vert :=\Vert \ \ \Vert _{L^2(\Omega )}\) we understand the standard norm of \(L^2(\Omega )\) space.
Assumption 1
Suppose that
-
1.
\(\Omega \) is an open and bounded set in \(\mathbb {R}^m\) with smooth boundary \(\partial \Omega \).
-
2.
Operator \(-\mathcal {L}: D(\mathcal {L}):= H_0^p(\Omega )\cap H^{2p}(\Omega ) \rightarrow L^2(\Omega )\), where \(\mathcal {L}\) is of form (2), is a strongly elliptic of order 2p and has smooth, complex-valued coefficients \(a_{{\textbf {p}}}(x)\). Moreover \(2p>m/2\).
-
3.
\(u_0 \in D(\mathcal {L}^4)\) and \(\alpha _n \in C^4\left( [0,t^\star ] ,H^{8p}(\Omega )\right) \), \(n = -N,\dots ,-1,1,\dots ,N,\) where \( D(\mathcal {L}^k)=\{u\in D(\mathcal {L}^{k-1}): \mathcal {L}^{k-1}u \in D(\mathcal {L})\}\), \(k=2,\dots \)
The assumed regularity of functions \(u_0\) and \(\alpha _n\) is related to the accuracy of the method. Assumption 1 ensures that differential operator \(\mathcal {L}\) is the infinitesimal generator of a strongly continuous semigroup \(\{\textrm{e}^{t\mathcal {L}}\}_ {t\ge 0}\) on \(L^2(\Omega )\) and therefore \(\max _{t \in [0,t^\star ]}\Vert \textrm{e}^{t\small \mathcal {L}}\Vert _{L^2(\Omega )\leftarrow L^2(\Omega )}\le C(t^\star )\), where \(C(t^\star )\) is some constant independent of t [17].
We wish to build the method based on time steps. Therefore, based on the semigroup property, we can modify equation (1) and express it as follows
where \(t\ge 0\) and \(h>0\) is a small time step. By u[t](x, s) we understand \(u[t](x,s)= u(x,t+s)\). By applying Duhamel formula to (9), we obtain
We could simply write \(u[t](s)= u(t+s)\), but the above notation helps avoid misunderstandings in subsequent formulas.
Let \(V_t\) denotes the following space
Define the linear operator \(T_t:V_t\rightarrow V_t\)
where function f is defined in (3). The Neumann series for equation (10) reads
Term \(T^d_t\textrm{e}^{h\small \mathcal {L}}u[t](0), \ d=1,2,\dots \), from (11) is equal to
It can be shown that the series (11) converges in the norms \(\Vert \ \ \Vert _{L^2(\Omega )}\) and \(\Vert \ \ \Vert _{H^{2p}(\Omega )}\) to the solution of equation (10), where \(2p >m/2\), for arbitrary time variable \(h>0\) [18]. The idea for finding an approximate solution to equation (1) involves approximating the first r terms of the Neumann series (11) using quadrature methods designated to highly oscillatory integrals. For convenience, we introduce a set
where 2N is a number of terms in sum (3). Using definition (3) of the function f and the linearity of semigroup operator, we can write each term of the Neumann series \(T^d_t\textrm{e}^{h\small \mathcal {L}}u[t](0), \ \textrm{d}=1,2,\dots \) in a more convenient form for our considerations
where
and \(\sigma _d(h)\) denotes a d-dimensional simplex
Using the above notation, solution u of (10) can be written as
In the proposed numerical scheme, for each time step h we take the first four terms of the above series that approximate the function \(u(t+h)\)
Then, we approximate each integral \(I[F_{\varvec{n}},\sigma _d(h)]\) in the above sum by applying the Filon quadrature. As a result, we derive a fourth-order local method. By employing Filon quadrature, the method’s error converges to zero both as \(h\rightarrow 0\) and as \(\omega \rightarrow \infty \). Our decision to consider only the first four terms in the Neumann expansion is rather arbitrary. The method can be enhanced to achieve a higher level of accuracy, albeit with increased computational costs and the requirement of better regularity for functions \(u_0\) and \(\alpha _n\).
Consider function \(F(\tau ):=F_{n_1}(h,\tau )\) from the second term of the Neumann series and the following univariate integral
where \(n_1 =-N,-N+1,\dots ,-1,1,\dots ,N\). Let \(p(\tau )\) be a cubic Hermite interpolating polynomial
which satisfy the conditions: \(p(0)=F(0)\), \(p(h)=F(h)\), \(p'(0)=F'(0)\), \(p'(h)=F'(h)\). We have
and the moments
can be calculated explicitly. Let now \(F(\tau _1,\tau _2):=F_{\varvec{n}}(h,\tau _1,\tau _2), \ \varvec{n}\in \varvec{N}^2\), and consider a bivariate integral
We approximate function \(F(\tau _1,\tau _2)\) in points (0, 0), (0, h) and (h, h), the vertices of the simplex \(\sigma _2(h)\), by linear function \(p(\tau _1,\tau _2)\),
The approximation of integral (15) by the Filon quadrature rule reads
and the integral on the right-hand side can be computed explicitly. Similarly, we proceed with the triple integral. Function \(F(\tau _1,\tau _2,\tau _3):= F_{\varvec{n}}(h,\tau _1,\tau _2,\tau _3), \ \varvec{n} \in \varvec{N}^3\) is approximated by linear function p at the vertices of the simplex \(\sigma _3(h)\): (0, 0, 0), (0, 0, h), (0, h, h), (h, h, h),
Then we have
The precise formulas for determining the coefficients \(a_{i,j}\) are presented in the Appendix A.
The proposed algorithm for computing the successive approximation of the solution u can be expressed in the following form:
where \(u^0= u_0\), \(t_0=0\), \(t_K=t^\star \), \(n_1,n_2,n_3 \in \{-N,-N+1,\dots ,-1,1,\dots ,N\}\) and the coefficients \(a_{i,j}\) are chosen so that the corresponding polynomial satisfies the Hermite interpolation conditions. Each of the integrals appearing in the scheme is computed explicitly. Furthermore, the expression \(\textrm{e}^{h\small \mathcal {L}}\) and the coefficients \(a_{i,j}\) of the interpolating polynomials, after spatial discretization, can be computed very efficiently and accurately using spectral methods [20] and/or splitting methods [16].
4 Local error analysis
The entire error of the method comes from two sources: the approximation of each integral from the partial sum of the Neumann series, and the error associated with the truncation of the Neumann expansion. In [18], the authors provide the asymptotic expansion of integral \(I[F_{\varvec{n}},\sigma _d(h)]\) from the Neumann series (14), where \(F_{\varvec{n}}\) is the function of the form (13), for the special case when the potential function f has positive frequencies, specifically when f takes the form
In such a situation, each integral \(I[F_{\varvec{n}},\sigma _d(h)]\) satisfies the nonresonance condition and therefore can be approximated by the partial sum \(\mathcal {S}^{(d)}_r(h)\) of the asymptotic expansion
where \(E^{(d)}_r(h)=\mathcal {O}(\omega ^{-r-1})\) is the error related to approximation of integral \(I[F_{\varvec{n}},\sigma _d(h)]\) by sum \(\mathcal {S}^{(d)}_r(h)\sim \mathcal {O}(\omega ^{-d})\). A similar result was first obtained in [14], where the authors provided the asymptotic expansion of a multivariate highly oscillatory integral over a regular simplex. However, in our analysis, the non-oscillatory function \(F_{\varvec{n}}\) is vector-valued rather than real-valued. We begin the error analysis of the proposed numerical method by considering function f from equation (1) in the form (17). Recall that \(\Vert \ \ \Vert \) denotes the standard norm of \(L^2(\Omega )\) space. In the following estimations, C is some constant that depends on functions \(\alpha _n\), initial condition u[t](0) of equation (9), their derivatives, solution u, differential operator \(\mathcal {L}\) and \(t^\star \), but it is independent of the time step h and the oscillatory parameter \(\omega \). Let us also note that since by Assumption 1, the function \(f \in C^4\left( [0,t^\star ] ,H^{8p}(\Omega )\right) \), we can apply the Sobolev embedding theorem to conclude that \(\Vert f(s)\Vert _\infty < \infty \) for all \(s \in [0,t^\star ]\). Therefore, the norm of product of two functions f and u can easily be estimated as \(\Vert f(s)u(s)\Vert \le \Vert f(s)\Vert _\infty \Vert u(s)\Vert , \ \forall s\in [0,t^\star ]\).
4.1 Positive frequencies
Lemma 1
Let \(F(\tau )\) be a 4 times continuously differentiable, vector-valued function, and let \(p(\tau )\) be a cubic Hermite interpolation polynomial such that \(p(0)=F(0)\), \(p(h)=F(h)\), \(p'(0)=F'(0)\), \(p'(h)=F'(h)\). Then the error of the Filon method satisfies
Proof
The estimation that the error is bounded by \(C\omega ^{-3}\) directly follows from well-known results concerning Filon quadrature, as described in [14]. By using the Taylor series with the remainder in integral form, one can show that \(\Vert F(\tau )-p(\tau )\Vert \le C h^4\) and \(\Vert F''(\tau )-p''(\tau )\Vert \le C h^2\). Therefore, by using integration by parts, we have
which completes the proof. \(\square \)
Lemma 2
Let \(F(\tau _1,\tau _2)\) be a vector-valued function of class \(C^2\) and \(p(\tau _1,\tau _2)\) be a linear function that satisfies the conditions: \(p(0,0)=F(0,0)\), \(p(0,h)=F(0,h)\), \(p(h,h)=F(h,h)\). Let numbers \(n_1>0\), \(n_2>0\). Then
Proof
Since vector \((n_1,n_2)\) satisfies the nonresonance condition, the approximated integral \(I[F,\sigma _2(h)]\) can be expanded asymptotically \(I[F,\sigma _2(h)]\sim \mathcal {O}(\omega ^{-2})\), and therefore the Filon method provides that the error satisfy \(I[(F-p),\sigma _2(h)]=\mathcal {O}(\omega ^{-3})\) [14]. As in the case in the proof of Lemma 1, by using the Taylor series with the remainder in integral form, we have the estimations \(\Vert F(\tau _1,\tau _2)-p(\tau _1,\tau _2)\Vert \le C h^2\) and \(\Vert \partial _{\tau _1}^1\left( F(\tau _1,\tau _2)-p(\tau _1,\tau _2)\right) \Vert \le C h\). For simplicity, let us assume that \(n_1=n_2=1\). Using integration by parts, we get
The second and third term on the right side of the above inequality are bounded by \(Ch^2\omega ^{-2}\), where C is some constant independent of h and \(\omega \). In the case of the first expression, we again apply integration by parts and the definition of the polynomial p, and thus get the following
which concludes the proof. \(\square \)
In a similar vein, we estimate the error of the Filon method for the triple integral
Lemma 3
Let \(F(\tau _1,\tau _2,\tau _3)\) be a vector valued function of class \(C^2\) and \(p(\tau _1,\tau _2,\tau _3)\) be a linear function approximating F such that \(p(0,0,0)=F(0,0,0)\), \(p(0,0,h)=F(0,0,h)\), \(p(0,h,h)=F(0,h,h)\), \(p(h,h,h)=F(h,h,h)\). Let numbers \(n_1,n_2,n_3>0\). Then the error of the Filon method can be estimated as follows
To complete the analysis of the local error, we need to estimate the truncation error of the Neumann series. We write the solution of (10) as
where, in our considerations, we take \(r=3\).
Lemma 4
Let the function f from equation (10) be of the form (17). Then the remainder \(\mathcal {R}^{[4]}[t](h)\) of the Neumann series (11) satisfied the following estimate
where constant C depends on functions \(\alpha _n\), u[t](0) their derivatives, solution u, operator \(\mathcal {L}\) and \(t^\star \), but is independent of time step h and parameter \(\omega \).
Proof
By using the basic properties of the operator norm and the fact that \(\Vert f\Vert _{\infty }<\infty \) we have
Let us now denote by \(\varvec{T}_t\) the operator \(\varvec{T}_t = \sum _{d=0}^{\infty }T_t^{d}\). On the other hand, we estimate
Expression \(T_t^{4}\textrm{e}^{h\small \mathcal {L}}u[t](0)\) is a sum of highly oscillatory integrals over a 4-dimensional simplex which satisfy the nonresonance condition and therefore \(\Vert T_t^{4}\textrm{e}^{h\small \mathcal {L}}u[t](0)\Vert = \mathcal {O}(\omega ^{-4})\). In addition, by using basic properties of the operator norm and the simple inequality \(\Vert uv\Vert _{L^2} \le \Vert u\Vert _{L^2}\Vert v\Vert _{\infty }\), we have
where the constant \(C_1>0\) depends on the norm of the semigroup operator \(\{\textrm{e}^{t\small \mathcal {L}}\}_{t\in [0,t^\star ]}\) and the supremum norm of the function f. Since term \(T^2\textrm{e}^{\tau _3\small \mathcal {L}}u[t](0)\) satisfies \(\left\| T^2\textrm{e}^{\tau _3\small \mathcal {L}}u[t](0)\right\| =\mathcal {O}(\omega ^{-2})\), we obtain the estimate
Moreover, it can be observed that expression \(\varvec{T}_tv[t](h)\), where \(\Vert v[t](h)\Vert _2\le 1\) is the solution of the integral equation
By Grönwall’s inequality, expression \(\psi =\varvec{T}_tv[t](h)\) is also bounded in \(L^2\) norm for any function v[t](h) such that \(\Vert v[t](h)\Vert _2\le 1\). Using the boundedness of operator \(\varvec{T}_t\), we can estimate
which completes the proof. \(\square \)
Let us emphasize that the time derivatives of the solution of the highly oscillatory equation (10) do not appear in the above estimates, which means that the constant C is independent of the parameter \(\omega \).
By collecting the estimations of integrals presented in Lemmas 1, 2, 3, and estimation of the remainder of the Neumann series in Lemma 4, one can provide the following local error bound of the scheme.
Theorem 1
Let Assumption 1 be satisfied and let the potential function f be of the form (17). Then the local error of the numerical scheme (16) satisfies the following estimate in the \(L^2\) norm
where constant C is independent of time step h and parameter \(\omega \).
4.2 The case involving negative frequencies
The situation becomes more complicated when we perform the error analysis of the proposed numerical integrator for potential function f in the general form (3). Let \(\varvec{n}=(n_1,\dots ,n_d) \in \varvec{N}^d\), where set \(\varvec{N}^d\) is defined in (12). Coordinates of \(\varvec{n}\) may satisfy
for certain \(1\le j < r\le d\), and therefore \(\varvec{n}\) is orthogonal to the boundary of simplex \(\sigma _d(h)\). Vector \(\varvec{n}\) does not satisfy the nonresonance condition, and, as a result, simple integration by parts does not yield error estimates similar to those presented in Lemmas 1, 2, and 3. In this case, we still obtain the fourth-order local error estimate of the numerical scheme \(\Vert u(t_0+h)-u^1\Vert \le Ch^4\), where C is independent of \(\omega \) and h, but we wish to derive a numerical scheme whose accuracy improves significantly with increasing \(\omega \).
At this stage, we consider two bivariate integrals from the Neumann series, \( I[F_{\varvec{n}_1},\sigma _2(h)]\) and \(I[F_{\varvec{n}_2},\sigma _2(h)]\), where \(\varvec{n}_1 = (-n,n)\) and \(\varvec{n}_2 = (n,-n)\). Vectors \(\varvec{n}_1, \varvec{n}_2 \in \varvec{N}^2\) are orthogonal to the boundary of simplex \(\sigma _2(h)\). By integration by parts one can show that \(I[F_{\varvec{n}_1},\sigma _2(h)]\sim \mathcal {O}(\omega ^{-1})\), \(I[F_{\varvec{n}_2},\sigma _2(h)]\sim \mathcal {O}(\omega ^{-1})\) but sum of the integrals satisfies \(\left( I[F_{\varvec{n}_1},\sigma _2(h)] +[F_{\varvec{n}_2},\sigma _2(h)]\right) \sim \mathcal {O}(\omega ^{-2})\) [18]. We exploit this fact by imposing an additional interpolation condition to construct Filon’s quadrature rule for the sum of two bivariate integrals that do not satisfy the nonresonance condition. We also assume that coefficients of function f satisfy \(\alpha _{-n}=\alpha _n, \ \forall n\in \varvec{N}^1\), therefore \(F_{\varvec{n}_1}= F_{\varvec{n}_2}=:F_{\varvec{n}}\).
Theorem 2
Let coefficients \(\alpha _{-n}=\alpha _n, \ \forall n\in \varvec{N}^1\) and consider function \(F_{\varvec{n}}\) of the form (13), i.e. \(F_{\varvec{n}}(\tau _1,\tau _2)= \textrm{e}^{(h-\tau _2)\small \mathcal {L}}\alpha _n[t](\tau _2)\textrm{e}^{(\tau _2-\tau _1)\small \mathcal {L}}\alpha _n[t](\tau _1)\textrm{e}^{\tau _1\small \mathcal {L}}u[t](0)\). Let polynomial \(p(\tau _1,\tau _2) = b_0+ b_1\tau _1+b_2\tau _2+ b_3\tau _1\tau _2\) satisfies the following interpolation conditions
and
Then
Proof
For simplicity, we can assume \(n=1\). It follows from the previous considerations that \((F_{\varvec{n}}-p) = \mathcal {O}(h^2)\), \(\partial _{\tau _1}^1(F_{\varvec{n}}-p) = \mathcal {O}(h)\) and \(\partial _{\tau _2}^1(F_{\varvec{n}}-p) = \mathcal {O}(h)\). Integration by parts and application of interpolation conditions gives
which completes the proof. \(\square \)
Since the function \(F_{\varvec{n}}\) is non-oscillatory, we can compute the integral (18) efficiently and effortlessly, using methods such as Gauss-Legendre quadrature.
In the case when function f is of the form (3), and the coefficients of f satisfy \(\alpha _{-n}=\alpha _n, \ \forall n\in \varvec{N}^1\), the improved scheme reads
5 Application of the method to the wave equation
The proposed numerical scheme can be successfully applied to partial differential equations with the second-time derivative. Consider the equation
with function f given in (3). We write (19) as a first-order system
where \(v = \partial _t u\). Thus
and therefore
where \(h(x,t)= \sum _{n=1}^{N}\textrm{e}^{\textrm{i}n\omega t}\beta _n(x,t)\) is a highly oscillatory function and \(\varphi \) is a vector valued function. Suppose that \(\mathcal {L}\) is a second-order differential operator which has symmetric form
where functions \(a_{ij}=a_{ji}, \ i,j=1,\dots ,m\) and \(c\ge 0\). By applying Duhamel’s formula we write (20) as
Operator \(A: D(A):= \left[ H^{2}(\Omega )\cap H_0^1(\Omega ) \right] \times H_0^1(\Omega )\rightarrow H_0^1(\Omega )\times L^2(\Omega )\) is the infinitesimal generator of a strongly continuous semigroup \(\{\textrm{e}^{tA}\}\) on \(H_0^1(\Omega )\times L^2(\Omega )\) [9]. One can show that the Neumann series converges absolutely and uniformly in the norm of space \(H_0^1(\Omega )\times L^2(\Omega )\) to the solution of equation (21) [18].
6 Numerical examples
In this chapter, we employ the proposed numerical integrator to solve highly oscillatory heat equations and wave equations. For each equation, it is possible to determine the analytical solution, enabling accurate comparisons with the numerical approximation. The \(L^2\) norm of the error is considered in any presented example. In our numerical experiments, to find an approximate solution, we use the Fourier and Chebyshev spectral methods, as described in [19, 20]. In Examples 1, 3 and 4 we used \(M=100\) spatial grid points. Example 2 concerns a two-dimensional case, in which we used \(M=20\) grid points.
Example 1
The heat equation.
Consider the equation
with initial condition \(u_0\)
and function f
The potential function f involves time-dependent coefficients \(\alpha _1\) and \(\alpha _2\) The solution to (22) is
Figure 1 displays the error of the method for equation (22).

Numerical approximation of the solution to equation (22). Error versus time step (left graph) and error versus parameter \(\omega \) (right graph)

Numerical approximation of the solution to equation (23). Error versus time step (left graph) and error versus parameter \(\omega \) (right graph)
Example 2
Two-dimensional heat equation.
where domain \(\Omega = [-1,1] \times [-1,1]\). The initial condition is
and function f
The solution to equation (23) reads
Figure 2 presents the error of the proposed method applied to equation (23).
Example 3
The wave equation with nonresonance points.
where initial conditions
and function f
The solution to (24) is
Figure 3 illustrates the error associated with the approximation of the solution to equation (24).

Numerical approximation of the solution to equation (24). Error versus time step (left graph) and error versus \(\omega \) (right graph)
Example 4
The wave equation with resonance points.
In the last example, consider now the wave equation with potential function f with negative frequencies
where function f takes the form
The solution of (25) is equal to
Figure 4 presents the error of the proposed method for equation (25).

Numerical approximation of the solution to equation (25). Error versus time step (left figure) and error versus \(\omega \) (right figure)
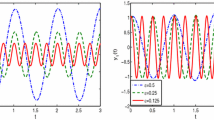
The Neumann series converges for all variables t, unlike the Magnus expansion, which converges only locally. Therefore, in the proposed scheme, any time step can be taken to find an approximate solution. In Fig. 5, we illustrate the error of the method for all four examples with step size \(h=1\), where \(\omega \) ranges from 5 to 1000. In each graph of error versus time step h, it can be observed that the proposed method is effective for both small (\(\omega =5\)) and large (\(\omega =200\)) oscillatory parameter \(\omega \).


Comparison of the proposed method NF3 with the exponential 4th order method (M4) and the exponential 2nd order midpoint method (M2). The numerical schemes have been applied to the equations (22), (23) and (24), where \(\omega =500\). Top row presents accuracy of schemes and the bottom row time of computation in seconds
6.1 Comparison with other methods
In this section, we compare the proposed numerical method (denoted as NF3) with selected existing methods. For this purpose, we used schemes based on the Magnus expansion: the exponential fourth-order method (denoted as M4) and the exponential midpoint method of order two (denoted as M2). Both integrators are described in detail in [11]. Each scheme was applied to equations (22), (23), and (24), where in each case the parameter \(\omega =500\). As is well known, the methods M4 and M2 are very effective for nonoscillatory equations. However, for a large parameter \(\omega \) which accounts for the oscillation of the equation, their effectiveness is limited. The proposed NF3 method performs particularly well in a highly oscillatory regime. The results of the comparisons are shown in Fig. 6.
7 Conclusion
The paper proposed a numerical integrator designed for linear partial differential equations with a highly oscillatory potential function of type (3). The numerical scheme is constructed by expanding the solution into the Neumann series. Subsequently, the first three integrals of the Neumann series are approximated using the Filon method. The classical and asymptotic order of the scheme is 3, which is confirmed by numerical experiments. The method is effective for both small and large values of the oscillatory parameter \(\omega \).
There are possible modifications of the proposed integrator. For integrals from the Neumann series, different extensions of the Filon method can be applied. For example, the nonoscillatory integrands can be approximated not only at points that are the ends of the integration interval but also at intermediate points. This should further improve the accuracy of the method.
Availability of supporting data
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
Ait el bhira, H., Kzaz, M., Maach, F.: Asymptotic-numerical solvers for linear neutral delay differential equations with high-frequency extrinsic oscillations. ESAIM Math. Model. Numer. Anal. 57(1), 227–241 (2023)
Bader, P., Blanes, S., Casas, F., Kopylov, N.: Novel symplectic integrators for the Klein-Gordon equation with space- and time-dependent mass. J. Comput. Appl. Math. 350, 130–138 (2019)
Blanes, S., Casas, F., Oteo, J.A., Ros, J.: Magnus and Fer expansions for matrix differential equations: the convergence problem. J. Phys. A 31(1), 259–268 (1998)
Cai, H.: Oscillation-preserving Legendre-Galerkin methods for second kind integral equations with highly oscillatory kernels. Numer. Algorithms 90(1), 1091–1115 (2022)
Condon, M., Deaño, A., Iserles, A.: On highly oscillatory problems arising in electronic engineering. M2AN Math. Model. Numer. Anal. 43(4), 785–804 (2009)
Condon, M., Iserles, A., Kropielnicka, K., Singh, P.: Solving the wave equation with multifrequency oscillations. J. Comput. Dyn. 6(2), 239–249 (2019)
Condon, M., Kropielnicka, K., Lademann, K., Perczyński, R.: Asymptotic numerical solver for the linear Klein-Gordon equation with space- and time-dependent mass. Appl. Math. Lett. 115, 106935, 7 (2021)
Deaño, A., Huybrechs, D., Iserles, A.: Computing highly oscillatory integrals. Society for Industrial and Applied Mathematics (SIAM), Philadelphia, PA (2018)
Evans, L.C.: Partial Differential Equations. Grad. Stud. Math. 19, Amer. Math. Soc., Providence, RI, (1998)
Hairer, E., Lubich, C., Wanner, G.: Geometric Numerical Integration. Structure-Preserving Algorithms for Ordinary Differential Equations, 2nd edn. Springer, Berlin (2006)
Hochbruck, M., Ostermann, A.: Exponential integrators. Acta Numer. 19, 209–286 (2010)
Iserles, A.: On the method of Neumann series for highly oscillatory equations. BIT 44(3), 473–488 (2004)
Iserles, A., Kropielnicka, K., Singh, P.: Solving Schrödinger equation in semiclassical regime with highly oscillatory time-dependent potentials. J. Comput. Phys. 376, 564–584 (2019)
Iserles, A., Norsett, S.: Quadrature methods for multivariate highly oscillatory integrals using derivatives. Math. Comp. 75(255), 1233–1258 (2006)
Kropielnicka, K., Lademann, K.: Third-order exponential integrator for linear Klein-Gordon equations with time and space-dependent mass. ESAIM Math. Model. Numer. Anal. 57(6), 3483–3498 (2023)
McLachlan, R.I., Quispel, G.R.W.: Splitting methods. Acta Numer. 11, 341–434 (2002)
Pazy A.: Semigroups of Linear Operators and Applications to Partial Differential Equations, Vol. 44 of Applied Mathematical Sciences. Springer-Verlag, New York (1983)
Perczyński, R., Augustynowicz, A.: Asymptotic expansions for the solution of a linear PDE with a multifrequency highly oscillatory potential (2023). arXiv:2310.14650
Shen, J., Tang, T., Wang, L.: Spectral methods. Springer Series in Computational Mathematics (2011)
Trefethen, L.N.: Spectral Methods in MATLAB. SIAM (2000)
Zhao, L., Huang, C.: The generalized quadrature method for a class of highly oscillatory Volterra integral equations. Numer. Algorithms 92(3), 1503–1516 (2023)
Acknowledgements
We would like to thank the reviewers for their suggestions, which led to the improvement of this article. We would also like to thank Barbara Wolnik and Antoni Augustynowicz for their valuable comments and suggestions on the paper.
Funding
Not Applicable.
Author information
Authors and Affiliations
Contributions
The authors contributed equally to the paper.
Corresponding author
Ethics declarations
Ethical Approval
Not Applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A
Appendix A
In this section, we provide precise calculations for approximating highly oscillatory integrals: univariate, bivariate, and trivariate, from the Neumann series.
Univariate integral
Consider the following integral
We denote \(F(\tau ):=\textrm{e}^{(h-\tau )\small \mathcal {L}}\alpha _{n_1}[t](\tau )\textrm{e}^{\tau \small \mathcal {L}}u[t](0)\). Function F is approximated by using Hermite interpolation \(F(0)=p(0)\), \(F(h)=p(h)\), \(F'(0)=p'(0)\), \(F'(h)=p'(h)\). The polynomial p approximating function F is equal to
where
If function \(\alpha _{n_1}\) is dependent on time, then
where \(ad{_{\small \mathcal {L}}^{1}}\big (\alpha \big )=\big [\mathcal {L}, \alpha \big ]\) and \([X,Y]\equiv XY-YX\) is the commutator of X and Y. Approximation of the univariate integral is as follows
Bivariate integral with nonresonnce points
We approximate the following bivariate integral
where \(F(\tau _1,\tau _2) := \textrm{e}^{(h-\tau _2)\small \mathcal {L}}\alpha _{n_2}[t](\tau _2)\textrm{e}^{(\tau _2-\tau _1)\small \mathcal {L}}\alpha _{n_1}[t](\tau _1)\textrm{e}^{\tau _1\small \mathcal {L}}u[t](0)\). Function F is interpolated in the nodes (0, 0), (h, h), (0, h), and \(F(0,0)=p(0,0)\), \(F(0,h)=p(0,h)\), \(F(h,h)=p(h,h)\), where \(p(\tau _1,\tau _2)\) is a linear polynomial that approximate function F
where
and
Approximation of the bivariate integral reads
Bivariate integrals with resonnce points
Consider the following sum of two integrals with resonnce points \((n,-n)\) and \((-n,n)\)
where \(F(\tau _1,\tau _2):= \textrm{e}^{(h-\tau _2)\small \mathcal {L}}\alpha _n[t](\tau _2)\textrm{e}^{(\tau _2-\tau _1)\small \mathcal {L}}\alpha _n[t](\tau _1)\textrm{e}^{\tau _1\small \mathcal {L}}u[t](0)\). The bivariate integrals with resonance points necessitate the imposition of an additional interpolating condition. Let \(p(\tau _1,\tau _2) = F(0,0)+ b_1\tau _1+b_2\tau _2+ b_3\tau _1\tau _2\), be a polynomial with coefficients \(b_j\) defined by the formulas
where
Polynomial p satisfies the conditions
The Filon quadrature reads
Trivariate integral
The last integral to be approximated is
where \(F(\tau _1,\tau _2,\tau _3) = \textrm{e}^{(h-\tau _3)\small \mathcal {L}}\alpha _{n_3}[t](\tau _3)\textrm{e}^{(\tau _3-\tau _2)\small \mathcal {L}}\alpha _{n_2}[t](\tau _2)\textrm{e}^{(\tau _2-\tau _1)}\alpha _{n_1}[t](\tau _1)\textrm{e}^{\tau _1\small \mathcal {L}}u[t](0)\). Function F is interpolated in the nodes (0, 0, 0), (0, 0, h), (0, h, h), (h, h, h) and \(F(0,0,0)=p(0,0,0)\), \(F(0,0,h)=p(0,0,h)\), \(F(0,h,h)=p(0,h,h)\), \(F(h,h,h)=p(h,h,h)\).
where
and
Approximation of the trivariate integral is
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Perczyński, R., Madejski, G. Numerical integrator for highly oscillatory differential equations based on the Neumann series. Numer Algor (2024). https://doi.org/10.1007/s11075-024-01841-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11075-024-01841-9