
Abstract
This paper is mainly focused on the solution of Sylvester matrix differential equations with time-independent coefficients. We propose a new approach based on the construction of a particular constant solution which allows to construct an approximate solution of the differential equation from that of the corresponding algebraic equation. Moreover, when the matrix coefficients of the differential equation are large, we combine the constant solution approach with Krylov subspace methods for obtaining an approximate solution of the Sylvester algebraic equation, and thus form an approximate solution of the large-scale Sylvester matrix differential equation. We establish some theoretical results including error estimates and convergence as well as relations between the residuals of the differential and its corresponding algebraic Sylvester matrix equation. We also give explicit benchmark formulas for the solution of the differential equation. To illustrate the efficiency of the proposed approach, we perform numerous numerical tests and make various comparisons with other methods for solving Sylvester matrix differential equations.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Differential Lyapunov and Sylvester equations are involved in many areas of applied mathematics and arise in numerous scientific applications. For instance, they play a crucial role in control theory, model order reduction, image processing and the list is not exhaustive. In particular, the differential Lyapunov matrix equation is a useful tool for stability analysis and control design for linear time-dependent systems [2, 3]. In this paper, we are concerned with numerically solving the differential Sylvester matrix equation of the form
where [\(t_0\),T] \(\subset \mathbb {R}\) is a closed and bounded time interval with \(t_0\), T are the initial and final times respectively. We set \(\varDelta _T=T-t_0\), the length of the interval [\(t_0\),T]. The coefficient matrices \(A \in \mathbb {R}^{n \times n}\), \(B \in \mathbb {R}^{s \times s}\), and \(C \in \mathbb {R}^{n \times s}\) are constant real matrices, where the set \(\mathbb {R}^{q \times k}\) is the space of real matrices of size \(q \times k\). The differential Lyapunov matrix equation corresponds to the symmetric case where \(B=A^T\). Before describing the new proposed method, we refer to the algebraic equation canonically associated to (1)
as the corresponding (or associated) algebraic Sylvester equation. To the best of our knowledge, despite the importance of differential matrix equations, few works have been devoted to their numerical resolution when the matrix coefficients are large. Adaptation of BDF and/or Rosenbrock methods has been described in [7, 8] (see also the references in [5]). However these adaptations usually suffer from a problem of numerical data storage. To remedy this problem, combining Krylov subspaces techniques with BDF methods or with Taylor series expansions have recently been proposed [5, 20]. Other existing methods described in the recent literature for solving large-scale differential Sylvester matrix equation rely on using the integral formula or some numerical ODE solver [21, 38]. The strategy we pursue in this manuscript is different in the sense that our approach for solving differential Sylvester (or Lyapunov) matrix equations is based on the use of the constant solution to the differential equation. The first result we use indicates that the solution of the differential equation is written in terms of the solution of the corresponding algebraic equation. Additionally, in the case where the coefficient matrices A and/or B are large, we combine the new expression of the solution with some projection techniques on Krylov subspaces, such as the block Arnoldi algorithm for solving the corresponding algebraic equations or for approximating the exponential of a matrix.
The outline of this paper is as follows: In Sect. 2, some preliminaries and basic results are recalled and the notations needed in this paper are introduced. In Sect. 3, we introduce our proposed method which is called the constant solution method (CSM in short), describe some of its properties and give some theoretical results. A summarized and brief description of the corresponding algorithm will also be given. In Sect. 4, we combine CSM with the block Arnoldi algorithm for solving algebraic Sylvester matrix equations in order to tackle large-scale differential Sylvester equations. The two cases: full and low-rank are discussed. Moreover, we establish theoretical results expressing the residual of the differential equation in terms of that of the algebraic equation. We also establish some theoretical results on the convergence and on the error estimates provided by the constant solution method. To have at hand an exact solution to which the approximate solution delivered by CSM, we show in Sect. 5 how to generate two benchmark differential Sylvester matrix equations with a known exact solution. In the last Section 6, which is devoted to numerical experiments, we describe several set of tests whose results indicate that CSM is an efficient and robust method. As usual, the last section is devoted to a brief conclusion.
2 Preliminaries and notations
In this section, we recall some known results and introduce the notations used in the rest of this paper. The identity matrix of \(\mathbb {R}^{q \times q}\) is denoted by \(I_q\). The Frobenius inner product is defined by
where \(\textrm{tr}(M)\) denotes the trace of a square matrix M. The associated Frobenius norm is denoted by \(\Vert Y\Vert =\sqrt{\langle Y,Y \rangle }\). A basis \([W_1,W_2,\ldots ,W_m]\) of matrices is F-orthogonal with respect the Frobenius inner product if \(\langle W_i, W_j \rangle = 0\), for \(i \ne j\). For a bounded matrix-valued function G defined on the interval \([t_0,T]\), we consider the following uniform norm given by
We recall that a bounded function on the compact \([t_0,T]\) is continuous on a such interval. The Kronecker product of two matrices \(J \in \mathbb {R}^{n_j \times m_j}\) and \(K \in \mathbb {R}^{n_k \times m_k}\) is the matrix \(J \otimes K=[J_{i,j}\,K]\) of size \(n_j\,n_k \times m_j\,m_k\). The following well known properties are used throughout this paper:
-
1.
\((A \otimes B)\,(C \otimes D) = (A\,C) \otimes (B\,D)\),
-
2.
\((A \otimes B)^T = (A^T \otimes B^T)\),
-
3.
\(vec(A\,B\,C) = (C^T \otimes A)\,vec(B)\).
The vec operator consists in transforming a matrix into a vector by stacking its columns one by one to form a single column vector. We also recall that the Hadamard product of two matrices \(J, K \in \mathbb {R}^{p \times q}\) is the matrix \(J \odot K = [J_{i,j}\,K_{i,j}]\) of the same size \(p \times q\).
The following proposition is given in [1] without any specific details of its proof. Although this proof does not present any major difficulty, it seemed interesting to us to give the details of this proof.
Proposition 1
The unique solution of the differential Sylvester matrix equation (1) is given by the following integral formula
Proof
Let \(x_0\), x, c be the vectors such that \(x_0=vec(X_0)\), \(x=vec(X)\), \(c=vec(C)\) where \(X_0\), X(t), and C are appearing in the system (1) which may be transformed to the following classical differential linear system
where the matrix \( \mathbb {A}\) of size \(ns\times ns\) is given by
It is well known that the previous system (4) has a unique solution x(t) which is differentiable with a continuous derivative on \([t_0, T]\) (it is even of infinite class on \([t_0, T]\) ), and the unique solution of (4) is given by the following formula
Now, since, the matrices \(I_s \otimes A\) and \(B^T \otimes I_n\) commute, then using the properties of the Kronecker product and the additive commutativity of the matrix exponential (\(e^{M+N}= e^{M}\,e^{N} \Longleftrightarrow M\,N = N\,M\)), it follows that
Thus,
Finally, this implies that the formula (5) giving the solution to the system (4) leads to the formula (3) giving the unique solution to the differential Sylvester system (1). \(\square \)
Remark 1
Although, the systems (1) and (4) are mathematically equivalent, the difficulties one may encounter when solving these systems are different. For moderate size problems, it is possible to apply a numerical integration scheme directly to the system (4) or to use (5). However, in many practical situations, exploiting expression (4) for computing the solution x(t) may be very expensive. Indeed, the matrix \(\mathbb {A}\) can be very large and difficult to handle on a computer. Another obstacle that can be encountered is in the evaluation of the exponential of matrices. With the form (1), some numerical techniques are available to approximate the matrix exponential, see [25, 33, 36].
3 The constant solution method for the differential sylvester matrix equation
In the integral Formula (3), quadrature methods are needed to compute numerically the approximate solution. Thus, when one (or both) of the matrix coefficients A or B is (or are) large and has (or have) no particular exploitable structure, the computation of the integral may be expensive or even unfeasible. In this section, we use another expression for the solution of the system (1) which is given in terms of the solution of the corresponding algebraic Sylvester matrix equation (2). This expression avoids the use of quadrature methods since it does not contain an integral. To the best of our knowledge, the approach we describe in this section has never been exploited in the context of solving large-scale differential Sylvester matrix equations. However, it is based on the classical and simple technique of adding a particular constant solution to the general solution of the homogeneous differential equation to form the general solution of a linear differential equation of order one with constant coefficients. Next, we give the following theorem, which gives a useful and interesting expression of the unique solution of the system (1). The result of this theorem is known in the literature [6, 16], but, in practice, it has not been exploited numerically to give approximate solutions. This theorem is not difficult to establish. However, in order to facilitate the reading of the present work, it seems interesting to us to give the proof of this theorem.
Theorem 1
Suppose that the matrices A and B in the system (1) are such that \(\sigma (A) \cap \sigma (-B) = \emptyset \), where \(\sigma (M)\) denotes the spectrum of the matrix M, then the unique and exact solution \(X^*(t)\) of the system (1) is given by
where \(\widetilde{X}^*\) is the unique and exact solution of the algebraic Sylvester equation (2).
Proof
The general solution of the homogeneous differential equation associated to (1) is given by
where \(Y \in \mathbb {R}^{n \times s}\) is some constant matrix. Since \(\sigma (A) \cap \sigma (-B) = \emptyset \), the algebraic Sylvester equation (2) has a unique solution \(\widetilde{X}^*\) (see, e.g., [26, Thm. 2.4.4.1]). Thus, the unique solution \(\widetilde{X}^*\) seen as a constant matrix function (i.e., \(\widetilde{X}^*(t) = \widetilde{X}^*\)), may be considered as a particular solution of the differential equation
It follows that the general solution of the previous differential equation is given by
Finally, since the unique solution of the differential system (1) must satisfy the initial condition \(X^*(t_0)=X_0\), it follows that \(X^*(t_0) = e^{t_0\,A} \, Y \, e^{t_0\,B} + \widetilde{X}^*= X_0\). The last equality implies \(Y = e^{-t_0\,A} \, \left( X_0 - \widetilde{X}^* \right) \, e^{-t_0\,B}\), and expression (6) follows immediately. \(\square \)
Remark 2
As the constant solution method is based on the existence of a solution to its corresponding algebraic matrix equation, our proposed method may not be feasible if the condition \(\sigma (A) \cap \sigma (-B) = \emptyset \) is not fulfilled.
In the remainder of this paper, we assume that the matrices A and B in (1) satisfy the condition
The following property shows the behavior of the matrix solution \(X^*(t)\) as the interval \([t_0, T]\) becomes very more and more large, namely, as the final time T goes to \(+\infty \).
Proposition 2
[30, Chapter 8] Suppose that the coefficients A and B in the system (1) are stable matrices, then the unique solution \(X^*(t)\) of the differential system (1) satisfies
where \(\widetilde{X}^*\) is the unique solution of the corresponding algebraic Sylvester equation (2).
In the remainder of this section, we suppose that the matrix coefficients A and B are of moderate size. In this case, an approximate solution to the algebraic Sylvester equation (2) may be obtained by a direct solver such as the Bartels-Stewart algorithm, the Schur decomposition, or the Hammarling method [4, 19, 22, 31, 41]. A common point to all these methods is first the computation of the real Schur forms of the coefficient matrices using the QR algorithm. Then, the original equation is transformed into an equivalent form that is easier to solve by a forward substitution. Now, suppose that \(\widetilde{X}_a\) is an approximate solution to the exact solution \(\widetilde{X}^*\) of the Sylvester algebraic equation (2), it follows that an approximate solution \(X_a(t)\) to the exact solution \(X^*(t)\) of the Sylvester differential equation (1) can be expressed in the following form.
Here, as A and B are assumed to be of moderate size, we also assume that both exponential \(e^{(t-t_0)\,A} \) and \(e^{(t-t_0)\,B} \) are computed exactly. To establish an upper bound for the error norm, let us introduce the algebraic error \(\widetilde{E}\) and the differential error E(t) given by
respectively. Finally, recalling that \(\varDelta _T=T-t_0\) and \(\displaystyle \Vert E\Vert _\infty = \sup _{t \in [t_0, T]} ||E(t)||\), we have the following result
Proposition 3
In the case where the matrix exponential is computed exactly, we have
It follows that
where E and \(\widetilde{E}\) are the errors associated to the approximate solutions \(X_a(t)\) and \(\widetilde{X}_a\) respectively.
Proof
Subtracting (7) from (6), we get
and from the triangular inequality, we obtain
The Frobenius norm being multiplicative (that is \(\Vert A\,B\Vert \le \Vert A\Vert \, \Vert B\Vert \)), this implies that \( \Vert e^{s\,M}\Vert \le e^{s\,\Vert M\Vert }\) for all \(s \ge 0\) and for any square matrix M. Thus,
As E is a continuous matrix function on the interval \([t_0, T]\), \((t-t_0) \le \varDelta _T\) and \(\displaystyle \Vert E\Vert _\infty = \sup _{t \in [t_0, T]} ||E(t)||\), then the desired result follows obviously. \(\square \)
Le us now introduce R(t) and \(\widetilde{R}\) the residuals associated to the differential and algebraic Sylvester matrix equations, respectively. These residuals are defined by
and satisfy the following proposition.
Proposition 4
In the case where the matrix exponential is computed exactly, the residual for the differential equation, is time-independent and we have
Proof
From (7), we have
On the other hand, we have
Then subtracting one of the two previous relations from the other, we get
\(\square \)
Before ending this section, we sketch in Algorithm 1 below the main steps that must be followed to obtain approximations \(X_k=X_a(t_k)\) to the solution of the differential Sylvester equation (1) at different nodes \(t_k\) (for \(k=1,\ldots ,N\)) of a suitable discretization of the time interval \([t_0, T]\).

Constant solution method in the case of moderate size (CSM).
4 Block Arnoldi for solving large-scale differential Sylvester matrix equations
It is well known that computing the matrix exponential may be expensive when the matrix is very large. Thus, expression (6) may not be directly exploitable in the case of large-scale matrix coefficients. In the following, we will see how to circumvent this difficulty using projection methods onto some Krylov subspace. Indeed, in addition to allowing us to obtain a good approximation of the exact solution of the algebraic Sylvester equation (2), Krylov subspace methods are also a useful tool to compute the action of matrix exponential on a block vector with a satisfactory accuracy. During the last three decades, various projection methods on block, global or extended Krylov subspaces have been proposed to solve Sylvester matrix equations (or other similar equations) whose coefficients are large and sparse matrices [10,11,12, 17, 23, 24, 27,28,29]. The common idea behind these methods is to first reduce the size of the original equation by constructing a suitable Krylov basis, then solve the obtained low-dimensional equation by means of a direct method such as the Hessenberg-Schur method or the Bartels-Stewart algorithm [4, 19], and finally recover the solution of the original large equation from the smaller one. For a complete overview of the main methods for solving algebraic Sylvester or Lyapunov equations, we refer to [3, 14, 40] and the references therein. In order to be as general as possible and not to impose restrictive assumptions, we opt for a resolution of the Sylvester (or Lyapunov) equation using the block Arnoldi process rather than the extended block Arnoldi process since the latter requires that the coefficient matrices A and B are non singular. This last condition may not be fulfilled in many practical cases.
We recall that projection techniques on block Krylov subspaces for solving matrix differential equations were first proposed in [20, 21] by exploiting the integral formula (3) and approximating the exponential of a matrix times a block of vectors or by solving a projected low-dimensional differential Sylvester matrix equation by means of numerical integration methods such as the backward differentiation formula (BDF) [13].
As said before, the approach we follow in this work is different from the one proposed in [20, 21]. It consists of exploiting formula (6), instead of the integral formula (3), which is less expensive. To have at hand an adequate basis of the considered Krylov subspace, we will use the block Arnoldi process described in the next subsection.
4.1 The block Arnoldi process
Let M be an \(l \times l\) matrix and V an \(l \times s\) block vector. We consider the classical block Krylov subspace
The block Arnoldi process, described in Algorithm 2, generates an orthonormal basis \(\mathbb {V}_m^M\) of the block Krylov subspace \(\mathbb {K}_m(M,V)\).

The block Arnoldi process (BA) applied to the pair (M, V).
Suppose that the upper triangular matrices \(H_{j+1,j}\) are full rank then, since the above algorithm involves a Gram-Schmidt procedure, the obtained block vectors \(V_1^M,V_2^M,\ldots ,V_m^M\) (\(V_i^M \in \mathbb {R}^{l \times s}\)) have their columns mutually orthogonal. Hence, after m steps, Algorithm 2 generates an orthonormal basis \(\mathbb {V}_m^M = \left[ V_1^M,V_2^M,\ldots ,V_m^M \right] \) of the block Krylov subspace \(\mathbb {K}_m(M,V)\) and a block upper Hessenberg matrix \(\mathbb {H}_m^M\) whose non zeros blocks are the \(H_{i,j} \in \mathbb {R}^{s \times s}\). We have the following and useful algebraic relations [18, 37].
where \(\overline{\mathbb {H}}_m^M = (\mathbb {V}_{m+1}^M)^T\,M\,\mathbb {V}_m^M \in \mathbb {R}^{(m+1)\,s \times m\,s}\), \(H_{i,j} \in \mathbb {R}^{s \times s}\) is the (i, j) block of \(\mathbb {H}_m^M\) and \(\mathbb {E}_m^{(s)}\) is the matrix of the last s columns of the \(m\,s \times m\,s\) identity matrix \(I_{m\,s}\), i.e., \(\mathbb {E}_m^{(s)} = [ 0_{s \times (m-1)\,s}, I_s ]^T\). In the following, we will use the notation
4.2 Full-rank case
Here, we suppose that A is a large matrix while B is relatively smaller, i.e., \(s \ll n\). We also assume that the derivative \(\dot{X}(t_0)\) of X at \(t_0\) is full rank, i.e., \(\textrm{rank}(\dot{X}(t_0))=s\), where X(t) denotes the exact solution of (1).
Now, as \(\dot{X}(t_0)=-C_0= A\,X_0+X_0\,B-C\), then \(C_0 = C-(A\,X_0+X_0\,B)\). It follows that the matrix function given by \(Y(t)=X(t)-X_0\) is the unique solution of the following system
Consequently, we may first solve the previous differential equation to get Y(t) and then deduce the solution \(X(t)=Y(t)+X_0\) of the differential equation (1). Thus, in the rest of this section, we will consider that \(X_0=0\) as an initial condition in (1)
To obtain approximate solutions to the algebraic Sylvester equation (2), one can use the block Arnoldi method in which we consider approximate solutions that have the following form
where \(\mathbb {V}_m^A\) is the orthonormal Krylov basis generated by applying m iterations of Algorithm 2 to the pair (A, C). Let \(\widetilde{R}_m\) be the algebraic residual given by
The correction \(\widetilde{Y}_m\), is obtained by imposing the Petrov-Galerkin condition
Thus, taking into account the relations (9)–(11) and (13), it follows that \(\widetilde{Y}_m\) is the solution of the reduced Sylvester equation
where \(\mathbb {H}_m^A = ({\mathbb {V}_m^A})^T\,A\,\mathbb {V}_m^A\) and \(C_m = (\mathbb {V}_m^A)^T \, C\). Note that from Algorithm 2, we also get that \(C = \mathbb {V}_m^A \, C_m\). Now, if \(\sigma (\mathbb {H}_m^A)\cap \sigma (-B)=\emptyset \), then the previous Sylvester equation admits a unique solution which can be obtained by a direct method [4, 19]. In addition, from the relations (9)-(11), the residual \(\widetilde{R}_m\) satisfies the following relation
According to [33, 35], the following approximation to \(e^{(t-t_0)\,A}\,\widetilde{X}^*\) holds
It follows, that an approximate solution \(X_m(t)\), for \(t \in [t_0, T]\), to the exact solution \(X^*(t)\) of the differential Sylvester matrix equation (1) may be obtained by
Taking into account (13), it follows that
where
This matrix function satisfies the following result.
Proposition 5
The matrix function \(Y_m(t)\) given by (17) is the unique solution of the reduced differential Sylvester matrix equation
Proof
The derivative of the matrix function \(Y_m(t)\) as given by (17) is
On the other hand, we have
Thus, it follows that
and additionally, \(Y_m(t)\) satisfies the initial condition \(Y_m(t_0)=0\). \(\square \)
Remark 3
Proposition 5 shows that another way to obtain an approximation of \(Y_m(t)\) can be the resolution of the projected and reduced differential equation (17) by using an adequate numerical ODE solver such as Runge–Kutta or BDF solvers. We recall that such technique was used in [20, 21]. In our proposed method, we do not use such approach, but instead, we solve the reduced corresponding algebraic equation by taking into account the approximations (16) together with the relation (17).
Now, let \(R_m(t)\) be the residual associated to the approximate solution \(X_m(t)\), i.e.,
The following proposition gives an expression for this residual.
Proposition 6
The residual for the differential equation is given by
where \(\widetilde{R}_m\) is the algebraic residual given in (14). Moreover
Proof
Replacing, in (19), \(X_m(t)\) by its expression given by (16), we get
Then, using (9), we obtain
As \(Y_m(t)\) is the solution of (18), we then get (20). Now, according to (17), we obtain
Finally, from (15), we get (21) and then the relation (22) follows immediately. \(\square \)
Note that if \(\mathbb {H}_m^A\) and B are stable, i.e., all the eigenvalues of \(\mathbb {H}_m^A\) and B belong to the half part of \(\mathbb {C}\) whose real part is negative. It follows that,
Then, using (21), we get
Now, let In addition and as done in the previous section, we consider the differential error \(E_m\) given by
We recall that \(X_m(t)\) and \(X^*(t)\) are the approximate and exact solutions to the differential equation, respectively. The following result gives an error estimate for the error norm \(E_m\).
Theorem 2
Suppose that m steps of the block Arnoldi process were run and let \(Z_m(t):=e^{(t-t_0)\,\mathbb {H}_m^A}\,\widetilde{Y}_m\,e^{(t-t_0)\,B}\), then the following error estimate holds
It follows that
where \(r_m^A = \Vert \widetilde{R}_m\Vert = \Vert H_{m+1,m}^A\,\overline{Y}_m\Vert \quad \textrm{and} \quad z_m^A(t) = H_{m+1,m}^A \,\overline{Z}_m(t)\), with \(\overline{Y}_m\), \(\overline{Z}_m(t)\) are the matrices of size \(s \times s\) formed by the s last rows of \(\widetilde{Y}_m\) and \(Z_m(t)\), respectively.
Proof
From (19) and the differential Sylvester matrix equation (1), we have
with \({E}_m(t_0)=0\). Thus, the function \(E_m(t)\) satisfies the following differential Sylvester matrix equation
So, \(E_m(t)\) may be written by the following integral formula
Passing to the norm, for all \(t \in [t_0, T]\), we get
As, \(\Vert e^{\alpha \,M}\Vert \le e^{\alpha \Vert M\Vert }\) for \(\alpha \ge 0\) and \(M=A\) or \(M=B\), we obtain that, for all \(t \in [t_0, T]\),
This gives after integration that, for all \(t\in [t_0,T]\) we have
Then using (21) and the triangular inequality, we get
Finally, the desired result is obtained by passing to the uniform norm. \(\square \)
Now, we point out that (20) provides a cheap formula for computing at each node \(t_k\) the norm \(r_{m,k}:= \Vert R_m(t_k)\Vert \) of the residual associated to the approximate solution \(X_{m,k}:=X_m(t_k)\). This formula avoids computing matrix vector products with the large coefficient matrix A since we have
where \(\overline{Y}_{m,k}=(\mathbb {E}_m^{(s)})^T \, Y_{m,k}\) is the matrix of size \(s\times s\) formed by the last s rows of the matrix \(Y_{m,k}:=Y_m(t_k)\).
Finally, we end this section by summarizing in Algorithm 3 our proposed method that is the block Arnoldi combined with the constant solution method (BA-CSM) applied for full-rank differential Sylvester equations

Block Arnoldi Constant Solution Method (BA-CSM) (Full-rank case).
4.3 Low-rank case
Now, we consider the case where both A and B are large matrices. Here, we assume that the derivative \(\dot{X}(t_0)\) of X at \(t_0\) is low-rank and given under the factored form \(\dot{X}(t_0)=-E\,F^T\) where \(E \in \mathbb {R}^{n \times r}\) and \(F \in \mathbb {R}^{s \times r}\) and X(t) is the exact solution of (1). Then, \(\dot{X}(t_0)=-E\,F^T = A\,X_0+X_0\,B-C\), thus \(E\,F^T = C-(A\,X_0+X_0\,B)\). As in the full-rank case, it follows that the matrix function given by \(Y(t)=X(t)-X_0\) is the unique solution of the following system
Accordingly, we can first solve the previous differential equation to get Y(t) and subsequently deduce the solution \(X(t)=Y(t)+X_0\) of the differential equation (1). Thus, in the rest of this section, we took \(X_0=0\) as an initial condition and assume that C is factored in the form \(C=E\,F^T\).
To obtain approximate solutions to the low-rank algebraic Sylvester equation (2), we can use the block Arnoldi method in which we consider approximate solutions that have the form
where \(\mathbb {V}_m^A\), \(\mathbb {V}_m^B\) are the orthonormal matrices obtained by running m iterations of Algorithm 2 applied to the pairs (A, E) and \((B^T,F)\) respectively.
Enforcing the following Petrov-Galerkin condition
to the algebraic residual \(\widetilde{R}_m\) given by
Multiplying (25) on the left by \((\mathbb {V}_m^A)^T\) and on the right by \(\mathbb {V}_m^B\) and taking into account relations (9)–(11) and (24), it follows immediately, that \(\widetilde{Y}_m\) is the solution of the reduced projected Sylvester equation
where \(\mathbb {H}_m^A=(\mathbb {V}_m^A)^T\,A\,\mathbb {V}_m^A\), \(\mathbb {H}_m^B=(\mathbb {V}_m^B)^T\,B^T\,\mathbb {V}_m^B\) are the \(m\,r \times m\,r\) upper block Hessenberg matrices generated by the block Arnoldi process and \(E_m = (\mathbb {V}_m^A)^T \, E\), \(F_m = (\mathbb {V}_m^B)^T \, F\). Note that from Algorithm 2, we also get that \(E = \mathbb {V}_m^A\, E_m\) and \(F = \mathbb {V}_m^B \, F_m\). Here also, if \(\sigma (\mathbb {H}_m^A) \cap \sigma (-\mathbb {H}_m^B) = \emptyset \), then equation (26) admits a unique solution which can be computed using a standard direct method such as those described in [4, 19]. Using the relation (9)–(10) and from the relations (24)–(26), we get
where \(V_{m,r}^A=V_{m+1}^A\,H_{m+1,m}^A\,(\mathbb {E}_m^{(r)})^T\) and \( V_{m,r}^B=V_{m+1}^B\,H_{m+1,m}^B\,(\mathbb {E}_m^{(r)})^T\). We also notice that, according to [33, 35], an approximation to \(e^{(t-t_0)\,A}\,\widetilde{X}^*e^{(t-t_0)\,B}\) may be obtained as
Then, it follows, that an approximate solution \(X_m(t)\) to the exact solution \(X^*(t)\) of the differential Sylvester matrix equation (1) may be given by
Taking into account (24) gives that
where
As in the full-rank case, we have the following proposition.
Proposition 7
The matrix function \(Y_m(t)\) given by (29) is the unique solution of the reduced differential Sylvester matrix equation
Proof
The derivative of the matrix function \(Y_m(t)\) as given by (29) is
On the other hand, we have
Thus, it follows that
Moreover, \(Y_m(t)\) satisfies the initial condition \(Y_m(t_0)=0\). \(\square \)
Next, the following proposition gives a useful expression of the residual which is defined, in the low-rank case, by
Proposition 8
The residual for the differential equation is given by
where \(Z_m(t)=e^{(t-t_0)\,\mathbb {H}_m^A} \, \widetilde{Y}_m \, e^{(t-t_0) \,(\mathbb {H}_m^B)^T}\) and \(\widetilde{R}_m\) is the algebraic residual given by (25). In addition,
Proof
Using the definition (31) of the residual \(R_m(t)\) and replacing \(X_m(t)\) by its expression given in (28), we get
Now, using the algebraic relation (9) in which M is replaced either by A or by B, we obtain
This may be arranged as following
Taking into account (30), we get (32). The relation (33) follows by replacing \(Y_m(t)\) by its expression (29) and taking into account (27). Finally, (34) is straightforward since \(\mathbb {V}_m^A\) and \(\mathbb {V}_m^B\) are orthogonal matrices.\(\square \)
Similarly to the full-rank case, let us remark that if \(\mathbb {H}_m^A\) and \(\mathbb {H}_m^B\) are stable, then
Let \(E_m(t)=X^*(t)-X_m(t)\) be the error at the step m. As in the previous subsection, we have the following error estimates.
Theorem 3
Suppose that m steps of the block Arnoldi process were run and let \(Z_m(t):=e^{(t-t_0)\,\mathbb {H}_m^A} \, \widetilde{Y}_m \, e^{(t-t_0) \,(\mathbb {H}_m^B)^T}\). Then, we have the following error estimate:
It follows that
where \(r_m^A= \Vert H_{m+1,m}^A\,\overline{Y}_m\Vert , r_m^B = \Vert \widehat{Y}_m\,(H_{m+1,m}^B)^T\Vert ,\, z_m^A(t) = H_{m+1,m}^A \,\overline{Z}_m(t) \; \text {and}\;\) \(z_m^B(t) =\widehat{Z}_m(t)\,(H_{m+1,m}^B)^T\).
The matrices \(\overline{Y}_m\), \(\overline{Z}_m(t)\) are of size \(r \times r\) and are formed by the last r rows of \(\widetilde{Y}_m\) and \(Z_m(t)\) respectively while the matrices \(\widehat{Y}_m\), \(\widehat{Z}_m\) are of size \(r \times r\) and are formed by the last r columns of \(\widetilde{Y}_m\) and \(Z_m(t)\), respectively.
Proof
As previously done in the proof of Theorem 2, we obtain by similar arguments that, for all \(t \in [t_0, T]\) we have
As the \(n \times n\) matrices \(V_{m,r}^A \,\left( Z_m(t) -\widetilde{Y}_m\right) \, (\mathbb {V}_m^B)^T\) and \( \mathbb {V}_m^A \, \left( Z_m(t)- \widetilde{Y}_m\right) \, ( V_{m,r}^B)^T\) are F-orthogonal, namely
Therefore,
Now, using the triangular inequality, we get that for all \(t \in [t_0, T]\), we have
and similarly, we also have
which completes the proof. \(\square \)
To continue the description of the present method, we notice that (32) enables us to check if \(\Vert R_m(t)\Vert < \texttt{tol}\) -where tol is some fixed tolerance-, without having to compute extra products involving the large matrices A and B. More precisely, we have
We end this subsection by recalling that in the case of large-scale problems, and as suggested in [24, 39], it is important to get the approximate solution \(X_k:= X_m(t_k)\) at each time \(t_k\) as a product of two low-rank matrices. If \(Y_k = V \, \varSigma \, W^T\) is the singular value decomposition of \(Y_k\), where \( \varSigma =\textrm{diag}[\sigma _1,\sigma _2,\ldots ,\sigma _{m\,r}]\) is the diagonal matrix of the singular values of \( Y_k\) sorted in decreasing order, then by considering \( V_l\) and \( W_l\) the \(m\,r \times l\) matrices of the first l columns of V and W corresponding respectively to the l singular values of magnitude greater than some tolerance \(\tau \), we get for each \(k=1,\ldots ,N\)
where \( Z_k^A = \mathbb {V}_m^A \,V_l \, { \varSigma }_l^{1/2} \) and \( Z_k^B = \mathbb {V}_m^B \, W_l\, { \varSigma _l}^{1/2}\).
The block Arnoldi combined with the constant solution method (BA-CSM) for solving the differential Sylvester matrix equation, in the case where C is low-rank, i.e., \(C=EF^T\), is summarized in Algorithm 4.

Block Arnoldi Constant Solution Method (BA-CSM) (Low-rank case).
Before investigating the performance and efficiency of the different algorithms described previously, we will show in the next section, how to construct a differential Sylvester equation which have a known exact solution.
5 Two constructed benchmark examples
In this section, we construct two examples of Sylvester (or Lyapunov) differential systems for which we give an explicit formula for computing the unique solution. The main idea behind such a construction is to have at hand a differential equation for which we have a reference solution to which we can compare the approximate solutions delivered by the different proposed methods. It should be noted that both of the two constructed benchmark examples can be used in large-scale cases, as can be seen in the following subsections.
5.1 A benchmark example based on nilpotent matrices
In this first example, we construct a differential Sylvester matrix equations for which the unique exact solution is explicitly known. To the best of our knowledge, this construction is new and has never been proposed before, in the literature. Moreover, we derive two formulas for the exact solution. The first one is based on the integral formula while the second one is based on the constant solution approach.
Let \(p_0 \ge 3\) be a small integer, \(n_0\), \(s_0\) two other integers and \(K, R \in \mathbb {R}^{p_0 \times p_0}\) be two nilpotent matrices of index \(p_0\) (\(K^{p_0} = R^{p_0} = 0_{p_0}\)). Let also \(n=p_0\,n_0\), \(s=p_0\,s_0\) and \(A_0 \in \mathbb {R}^{n_0, \times n_0}\), \(B_0 \in \mathbb {R}^{s_0, \times s_0}\), \(X_0, C \in \mathbb {R}^{n \times s}\). For two real numbers \(\alpha \) and \(\beta \), we consider the matrices
Then, for any real t and for any matrix X of size \(n\times s\), we can check that:
where \(L_{i,j}(X)=\dfrac{1}{i!j!}(A_0 ^i \otimes K^i)X(B_0 ^j \otimes R^j)\).
Assuming that \(\alpha +\beta <0\), then the unique solution \(\widetilde{X}^*\) of the algebraic Sylvester matrix equation \(A\,X+X\,B=C\) is given by the formula (see [32]),
Straightforward calculations give
where \(C_{i,j}=L_{i,j}(C)=\dfrac{1}{i!j!}(A_0^i \otimes K^i)C(B_0^j \otimes R^j)\). Then, using formula (6), the unique solution of the differential Sylvester matrix equation (1) is the matrix function \(X^*(t)\) given by
It follows that
Conversely, we may check that the matrix function given by (37) is a solution of the differential Sylvester equation satisfying the given initial condition. This leads to note that the condition \(\alpha +\beta <0\) is in fact superfluous.
We may also obtain the solution \(X^*(t)\) of the differential Sylvester matrix equation by using the integral formula (3), since we have
It follows that,
where the scalar functions \(I_k(t)\) are given by \(\displaystyle I_k(t) = \int _{t_0}^t (t-u)^{k} \, e^{(\alpha +\beta ) \, (t-u)} \, du\). The expression of the functions \(I_k(t)\) are obtained by recursion. Indeed, we have
and for \(k \ge 1\) by parts integration, we have
Then, we may show by induction that, for all \(k \ge 0\), we have
Before ending this subsection, let us remark that in this benchmark example, the matrix C is arbitrary and then can also be taken in the low-rank form \(C=E\,F^T\), where \(E \in \mathbb {R}^{n \times r}\) and \(F \in \mathbb {R}^{s \times r}\).
5.2 A benchmark example based on the spectral decomposition
The second benchmark example is inspired by the paper by Behr et al, see [5]. However, unlike the techniques described in [5], we do not assume that the matrix coefficients are diagonalizable, and instead we propose a technique based on a truncated (partial) spectral decomposition of the matrix coefficients.
In the following, given a square matrix M of size n and a rank \(q_M {\ll } n\), the partial spectral decomposition of rank \(q_M\) associated with M that we consider is the one given by \(M\,U_M=U_M\,D_M\) where \(D_M = diag(\mu _1,....,\mu _{q_M})\) is the \(q_M\times q_M\) diagonal matrix formed by the \(q_M\) largest magnitude eigenvalues of M and \(U_M\) is the rectangular matrix of size \(n \times q_M\) whose columns are the corresponding eigenvectors. We recall that, in Matlab, the coefficients \(D_M\) and \(U_M\) are obtained via the instruction [\(U_M\), \(D_M\)]=eigs(M, \(q_M\)).
5.2.1 Sylvester differential case
Here, we assume the existence of two partial spectral decomposition of rank \(q_A \ll n\) and \(q_B \ll s\) associated to A and \(B^T\) respectively. Thus, there exists two rectangular matrices \(U_A\) and \(U_B\) of size \(n \times q_A\) and \(s \times q_B\) and two diagonal matrices \(D_A=diag[\alpha _1,\ldots ,\alpha _{q_A}]\) and \(D_B=diag[\beta _1,\ldots ,\beta _{q_B}]\) of size \(q_A \times q_A\) and \(q_B \times q_B\) respectively, such that \(A\,U_A=U_A\,D_A\) and \(B^T\,U_B=U_B\,D_B\). Moreover, we assume that the condition \(\alpha _i+\beta _j\ne 0\) holds for all \(1 \le i\le q_A\) and for all \(1 \le j\le q_B\). Then, letting \(E_1\) of size \(q_A\times r\), \(F_1\) of size \(q_B\times r\) be two given block vectors and \(\displaystyle Q = \left( \dfrac{1}{\alpha _i+\beta _j} \right) _{\underset{1 \le j \le q_B}{1 \le i \le q_A}}\), it is obvious to see, that
is the unique solution of the following algebraic Sylvester equation \(D_A\,Z+Z\,D_B = E_1F_1^T\).
Using the constant solution method, we get that the unique solution \(Y^*(t)\) of the linear differential system
is given by
As \(D_A\) and \(D_B\) are diagonal matrices, then
It follows that, the unique solution of the differential system (39) is given by
where the matrix-valued functions G(t) and H(t) are given by
Now, multiplying the differential equation in (39), on the left by \(U_A\) and on the right by \(U_B^T\) and using the fact that \(A\,U_A=U_A\,D_A\) and \(B^T\,U_B=U_B\,D_B\), we get
Consequently, if \(E=U_A\,E_1\) and \(F=U_B\,F_1\), then the following Sylvester differential system
has \(X^*(t)=U_A\,Y^*(t)\,U_B^T\) as the unique solution. From (40), we have
Furthermore, let us notice that the algebraic Sylvester equation \(A\,X+X\,B=E\,F^T\) has as unique solution the matrix \(\widetilde{X}^*\) given by
5.2.2 Lyapunov differential case
Let A be a large sparse matrix of size \(n \times n\), M be a real symmetric definite positive matrix of size \(n \times n\) and \(q \ll n\) a small integer. Next, we consider the truncated spectral decomposition of order q of the pair (A, M) given by \(A\,U = M\,U\,D\) where \(D=diag[\alpha _1,\ldots ,\alpha _q]\) of size \(q \times q\) is a diagonal matrix containing the q first largest magnitude eigenvalues of \(M^{-1}A\) and U of size \(n \times q\) whose columns are the corresponding eigenvectors. Let also \(E_1\) be a full-rank block vector of size \(q \times r\) with \(r \ll n\).
Let us also consider the following \(q \times q\) differential system:
Then, its associated algebraic equation \(D\,Z+Z\,D=E_1\,E_1^T\) has as unique solution \(\widetilde{Y}^*= Q \odot (E_1\,E_1^T)\), where the matrix Q is given by \(\displaystyle Q = \left( \dfrac{1}{\alpha _i+\alpha _j} \right) _{1 \le i, j \le q}\).
Using the constant solution method, we verify that \(Y^*(t)=-e^{(t-t_0)D}\widetilde{Y}^*e^{(t-t_0)D}+\widetilde{Y}^*\), is the unique solution of the linear system (43). In addition, as D is diagonal, then \(e^{(t-t_0)\,D}=diag[e^{(t-t_0)\,\alpha _1},\ldots ,e^{(t-t_0)\,\alpha _{q}}]\) and the unique solution is given by
where the matrix-valued functions G(t) and F(t) are
Now, left and right multiplying the differential equation in (43) by \(M\,U\) and \(U^T\,M^T\) respectively, we get
where the block vector \(F=M\,U\,E_1\) is of size \(n \times r\). Now, as \(A\,U=M\,U\,D\), then we get that \(X^*(t) = U\,Y^*(t)\,U^T\) is the unique solution the following Lyapunov matrix differential equation
Finally, we note that from (44), we get
We end this subsection by recalling that generalized differential Lyapunov matrix equations of kind (45) are used to define optimal controls for a finite element discretization of a heat equation, see [5, 9]. We also note that the last differential system (45) is equivalent to the following one:
where \(\widetilde{A}=M^{-1}\,A\) and \(E=U\,E_1\).
6 Numerical experiments
In this section, a serie of numerical tests is presented to examine the performance and potential of Algorithms 1, 3 and 4. We have compared our proposed method which is based on relation (6) with those based on the integral formula (3) and described in [21, 38]. We recall that the algorithms described in the two cited previous papers only provide an approximate solution at the final time T and moreover they only deal with the case of low-rank differential equations. Thus, we modified Algorithm 1 and Algorithm 4 proposed in [21] and [38] respectively, so that they provide an approximate solution \(X_{m,k}=X_m(t_k)\) at each node \(t_k\) of the discretization of the time interval [0, T] as it is the case in Algorithm 4. Moreover, we have drafted other codes based on the integral formula (3) and equivalent to Algorithms 1 and 3.
It should be noted that in all the examples given here, we suppose that the matrix \(X_0\) appearing in the initial condition of (1) is equal to zero, i.e., \(X_0 = 0_{n \times s}\). Furthermore, we consider different time intervals \([t_0, T]\) where \(t_0=0\) is fixed once and for all, while T is indicated in each example. The time interval [0, T] is divided into sub-intervals of constant length \(\delta _T=\frac{T}{N}\) where N is the number of nodes. All the numerical experiments were performed using MATLAB and have been carried out on an Intel(R) Core(TM) i7 with 2.60 GHz processing speed and 16 GB memory. In order to implement the different algorithms described in this work, we used the following MATLAB functions:
-
expm: it allows to calculate the exponential of a square matrix. This function is based on a scaling and squaring algorithm with a Padé approximation [25].
-
lyap: it allows to solve Sylvester or Lyapunov matrix equations. For our purposes, the instruction lyap(A,B,-C) delivers the matrix X solution of the algebraic Sylvester equation \(A\,X+X\,B=C\).
-
integral: it allows to calculate numerically an integral, using the arguments “ArrayValued” and “true.”
-
eigs: it allows to calculate numerically the partial spectral decomposition of a couple of sparse matrices.
Furthermore, we precise that when the constant solution or integral formula methods are combined with the block Arnoldi process to obtain an approximate solution to the differential equation, the iterations were stopped as soon as the dimension of the Krylov subspace generated by the block Arnoldi process reaches a maximum value \(m=M_{max}=110\) or as soon as the maximal norm \(r_{max}\) computed by the algorithm is lower than \(10^{-10}\,\mu \) where \(\mu =\Vert A\Vert +\Vert B\Vert +\Vert C\Vert \) in the full-rank case and \(\mu =\Vert A\Vert +\Vert B\Vert +\Vert E\Vert \,\Vert F\Vert \) in the low-rank case. We also mention that in the numerical examples, the right-hand side C or its factors E and F were generated randomly.
To compare the performances of the constant solution method (in short CS or CS-BA when combined with the block Arnoldi process) with those of the Integral Formula method (in short IF or IF-BA when combined with the block Arnoldi process or IF-GA when combined with the global Arnoldi process), we used the following comparison criteria:
-
TR: the time ratio between the cpu-time of a Constant Solution (CS) based method and an Integral Formula (IF) based method is defined by
$$\begin{aligned} \mathtt{TR_{\tiny MI}^{\tiny MC}} = \frac{cpu-time(\texttt{MC})}{\text{ cpu-time(MI) }}, \end{aligned}$$(48)where MC \(\in \) {CS, CS-BA} stands for one of the methods based on the constant solution approach and MI \(\in \) {IF, IF-BA, IF-GA} denotes one of the methods based on the integral formula.
-
RDN: the relative difference norm between \(X^{CS-BA}\) and \(X^{IF-BA}\) which are the approximate solutions delivered by the constant solution and the integral formula methods respectively when they are combined the block Arnoldi process.
$$ \mathtt{RDN_{\tiny IF-BA}^{\tiny CS-BA}} = \max _{k=0,1,\ldots ,N} \frac{ \Vert X_k^{\tiny CS-BA} - X_k^{ \tiny IF-BA} \Vert }{\Vert X_k^{\tiny IF-BA}\Vert }. $$We point out that this criteria is used when the exact solution of the differential Sylvester equation is not available.
-
REN: the relative error norm between the exact solution and an approximate solution obtained either by a constant solution based algorithm or by an integral formula based algorithm. More precisely, letting \(X^{ \tiny Ref}\) be the reference solution computed by (37), (38), (42) or (46), we define the following quantities:
$$\begin{aligned} \left\{ \begin{array}{c} \texttt{REN}^{\tiny CS-BA} = \displaystyle \max _{k=0,1,\ldots ,N} \frac{ \Vert X_k^{ \tiny CS-BA} - X_k^{\tiny Ref} \Vert }{ \Vert X_k^{\tiny Ref}\Vert },\\ \texttt{REN}^{\tiny IF-BA}= \displaystyle \max _{k=0,1,\ldots ,N} \frac{ \Vert X_k^{ \tiny IF-BA} - X_k^{\tiny Ref}\Vert }{ \Vert X_k^{\tiny Ref}\Vert } \\ \texttt{REN}^{\tiny IF-GA} = \displaystyle \max _{k=0,1,\ldots ,N} \frac{ \Vert X_k^{ \tiny IF-GA}- X_k^{\tiny Ref}\Vert }{ \Vert X_k^{\tiny Ref}\Vert } \end{array} \right. \end{aligned}$$(49)
Before describing the different numerical tests we performed, we mention that, to generate the exact solution given by (37) in the first benchmark example, we chose \(p_0=3\) and we considered different values for the parameters \(\alpha \), \(\beta \) as well as different matrices \(A_0\), \(B_0\). On the other hand the matrices K and R are fixed and are once and for all, as follows
6.1 Experiment 1
In this first example, the numerical tests are done with moderate size matrices A and B. We compare the solution provided by our proposed constant solution method implemented via Algorithm 1 with the one obtained using the integral formula (3) as well as with the solutions given by some classical ODE’s solvers from Matlab. The solvers ode15s, ode23s, ode23t, and ode23tb are usually used for stiff ODE’s, while the other solvers ode45, ode23, and ode113 are used for non stiff ODE’s. Note that since some ODE solvers behave similarly and in order not to overload the plots, we only give the results obtained with the four methods ode15s, ode23s, ode23tb, and ode45.
Experiment 1.1 In the following experiment, we consider the time intervals [0, T] with T is either \(T=1\) with the number of nodes is \(N=10\) or \(T=10\) with the number of nodes is \(N=50\) which means that the step time is \(\delta _T=0.1\) when \(T=1\) while \(\delta _T=0.2\) when \(T=10\). Here, we consider the matrices \(A_0\) =gallery(‘leslie,’ \(n_0\)), \(B_0\) = gallery(‘minij,’ \(s_0\)) with \(n_0=50\) and \(s_0=10\) and the coefficient matrices A, B of the differential Sylvester equations are generated by (36), as explained in the benchmark example. The parameters \(\alpha \), \(\beta \) are equal to \(-2\) and \(-1\) respectively. As the matrices K, R are those given at the beginning of Section 6, the size of the matrices A, B are now \(n=150\) and \(s=30\), respectively. Here, we point out that the solution computed by Algorithm 1 and those computed by the Algorithm based on integral formula or issued by the Matlab ODE solvers are compared to the exact one given in (37) which is considered as the reference solution \(X^{ref}\). Thus, in the plots, we represent the behaviour of the norm of the relative error
as a function of \(t_k\) where \(t_k=k\,\delta _T\). The obtained plots and results are reported in Fig. 1 and Table 1 respectively.

Experiment 1.1: comparison of the relative error norm. The reference solution is given by (37)
Experiment 1.2 Here, we give the results when solving a differential Lyapunov matrix equation. We consider the time interval [0, T] with \(T=10\) and the number of nodes \(N=50\) which means that the step time is \(\delta =0.2\). Two test matrices are considered which are \(A=A_1\)=-gallery(‘lehmer,’ n) and \(A=A_2\)=-gallery(‘minij,’ n) with \(n=70\). Note that in the present test, the reference solution is the one obtained via a partial spectral decomposition of rank \(q_A=15\). More precisely, the reference solution \(X^{\tiny Ref}\) is the one given by (46) for the particular case \(M=I_n\). The obtained plots and results are reported in Fig. 2 and Table 2 respectively.
The analysis of results obtained in Experiments 1.1 and Experiments 11.2 shows on the one hand that the CS and IF methods return the best results in terms of the error norm. The ode45 solver is the best among the other Matlab solvers, but its performance does not match that of the CS and IF methods. On the other hand, by comparing the time ratios between CS and IF which are
-
\(\mathtt{TR_{\tiny CS}^{\tiny IF}} = \dfrac{12.578}{0.203} \simeq 61\) for \((T,N)=(1,10)\) and \(\mathtt{TR_{\tiny CS}^{\tiny IF}} = \dfrac{75.703}{0.718} \simeq 105\) for \((T,N)=(10,50)\), in Experiment 1.1.
-
\(\mathtt{TR_{\tiny CS}^{\tiny IF}} = \dfrac{49.650}{0.453} \simeq 109\) for \(A=A_1\) and \(\mathtt{TR_{\tiny CS}^{\tiny IF}} = \dfrac{59.546}{0.515} \simeq 115\) for \(A=A_2\), in Experiment 1.2,
we clearly see that CS is faster than IF because the former avoids using a quadrature formula as it is the case for the later.
6.2 Experiment 2
In this set of numerical tests, the experiments are done with a relatively large matrix A and a moderate size matrix B. We compare the performances of Algorithm 3 -which implements the CS-BA method- and the equivalent algorithm based on the integral formula combined with the block Arnoldi (IF-BA).

Experiment 1.2: comparison of the relative error norm. The reference solution is given by (46)
Experiment 2.1. The matrices A and B are obtained from the centered finite difference discretization of the operators
on the unit square \([0,1] \times [0,1]\) with homogeneous Dirichlet boundary conditions where
and
To generate the coefficient matrices A and B, we used the fdm_2d_matrix function from the LYAPACK toolbox [34] as following A=fdm_2d_matrix(\(n_0\),\(f_A\),\(g_A\),\(h_A\)) and B=fdm_2d_matrix(\(s_0\),\(f_B\),\(g_B\),\(h_B\)) where \(n_0\) and \(s_0\) are the number of inner grid points in each direction when discretizing the operators \(L_A\) and \(L_B\) respectively. This gives \(A \in \mathbb {R}^{n \times n}\), \(B \in \mathbb {R}^{s \times s}\) with \(n=n_0^2\) and \(s=s_0^2\).
We examine the performances of CS-BA and IF-BA for four choices of \(n_0\) and \(s_0\) which are \((n_0,s_0)=(30,3)\), \((n_0,s_0)=(50,3)\), \((n_0,s_0)=(30,5)\) and \((n_0,s_0)=(50,5)\). The considered time intervals are [0, T] where \(T=1\) and \(N=10\) or \(T=2\) and \(N=20\). This means that the step time is always \(\delta _T=0.1\). In Table 3, we reported the time ratio (\(\texttt{TR}\)) and the relative difference norm (\(\texttt{RDN}\)) between the CPU-time of CS-BA and IF-BA.
Experiment 2.2. In this test, we took \(A_0\) =gallery(‘hanowa,’ 1500, −5) and \(B_0\) = gallery(‘leslie,’ 6) from the Matlab gallery and transform them into A et B of sizes \(n=4500\) and \(s=18\) respectively by using (36) in which we took \(\alpha =-7\) and \(\beta =-5\). The obtained results for different time intervals which are summarized in Table 4 include the time ratio \(\texttt{TR}\) and the relative error norms \(\texttt{REN}^{CS-BA}\), \(\texttt{REN}^{IF-BA}\) between the approximate solutions \(X^{CS-BA}\), \(X^{IF-BA}\) given by CS-BA and IF-BA respectively and the \(X^{Exact}\) the exact solution computed by (37).
6.3 Experiment 3
We describe and report here the results of numerical experiments carried out when solving large-scale low-rank differential Sylvester or Lyapunov equations. The performance of CS-BA is compared with that of IF-BA. The test matrices come either from the centred finite difference discretization of the operators \(L_A\) and \(L_B\) defined in the previous experiment, or from the Florida suite sparse matrix collection [15]. The invoked matrices for our tests from this collection are: pde900, pde2961, cdde1, Chem97ZtZ, thermal, rdb5000, sstmodel, add32 and rw5151.
Experiment 3.1 (a). In this example, the numerical results are those obtained from solving differential Sylvester equations. The time interval is fixed to [0, 1], (\(T=1\)). The number of nodes is \(N=10\) which gives a step time \(\delta _T=0.1\). The matrices \(A \in \mathbb {R}^{n \times n}\) and \(B \in \mathbb {R}^{s \times s}\) come from the discretization of the operators \(L_A\) and \(L_B\). As indicated previously, the coefficients of the right-hand side \(E, F \in \mathbb {R}^{n \times r}\) are randomly generated. The obtained results for different sizes n, s and ranks r are summarized in Table 5.
Experiment 3.1 (b). Here, we consider two different time intervals [0, T] for \(T=1\) and \(T=10\) in which the number of sub-intervals is always \(N=10\). The matrix A is from the Florida sparse matrix collection. We consider the particular case \(B=A^T\) and \(F=E\) and report the results obtained when solving low-rank differential Lyapunov equations. The obtained results for \(r=2\), \(r=5\) or \(r=10\) are displayed in Table 6.
Experiment 3.2 (a). Here, we consider \(A_0\)=pde2961 and \(B_0\)=pde900 and transform them into A et B of sizes \(n=8883\) and \(s=2700\) respectively by using (36). In order to confirm the influence of the rank r and/or length T of the time interval, on the performances of the CS and IF methods, we report in Table 7 the results obtained for two cases: case 1: \((\alpha ,\beta )=(-3,-1)\) and case 2: \((\alpha ,\beta )=(-0.7,-0.4)\). For each case, we choose T from the set \(\{2,5,10\}\) and took \(N=10\) for \(T=2\), \(N=20\) for \(T=5\) and \(N=40\) for \(T=10\). The rank r of the factors E and F is equal to \(r=5\), \(r=10\) or \(r=20\).
We notice that in most of tests, both methods manage to provide a good approximate solution and that the CPU time is in favor of the BA-CS method. However, we observed that for small values of \(\alpha \) and \(\beta \) and when the values of r and T are large, the BA-IF method failed to converge within a reasonable time. The non-convergence is indicated by “\({-}{-}{-}\).”
Experiment 3.2 (b). In this last set of experiments, we compare the performances of the CS and IF methods when they are applied to the solution of low-rank differential Lyapunov equations. Unlike the previous series of tests, we did not generate a discretization for the interval [0, T] and only calculated the approximation X(T) at the final time, where \(T=10\). Similarly, the rank of \(C=E\,E^T\) does not vary and is \(r=20\). For each experiment with a matrix \(A_0\) -which is taken from the Florida sparse matrix collection [15]-, we considered four values for the scalar \(\alpha \) that was used in the generation of the benchmark example. The size \(n_0\) of each matrix \(A_0\), the size n of the benchmark matrix A as well as the obtained results are reported in Table 8.
6.4 Experiment 4
Here, we compare three methods which are the constant solution method based on the block Arnoldi process (CS-BA), the Integral Formula method based on the block Arnoldi (IF-BA) [20, 21] and the Integral Formula method based on the global Arnoldi process (IF-GA) [38]. We illustrate the performance of the compared methods when they are applied to solve the generalized differential Lyapunov system (47) according to the construction given in Sect. 5.2. We point out that this example is derived from a finite-element discretization of a heat equation and is taken from [5, 9]. The matrices A and M are the rail matrices from the Suite Sparse Matrix Collection [15] and we consider the choices: (A,M)=(rail_1357_A, rail_1357_E) (A,M)=(rail_5177_A,rail_5177_E) and (A,M)=(rail_20209_A,rail_20209_E). Each of the preceding matrices is of size \(n \times n\) with \(n=1357,~5177,~20209\) respectively. The number of nodes for the time interval [0, T] is fixed and is \(N=10\). The approximate solution delivered by each method is compared to the reference solution given by (46) which corresponds to the partial spectral decomposition of rank \(q=25\). The obtained results for different values of the rank r of the right-hand side \(E\,E^T\) (\(r\in \{5,10,20\}\)) and different values of T (\(T\in \{1,5,50,500,5000\}\)) are summarized in Tables 9, 10 and 11.
The analysis of the results reported in the previous tables and those of other experiments that are not reported here shows that the CS-BA method takes less time than IF-BA or IF-GA methods. In some cases, the time ratio can reach or exceed two. The relative errors for the CS-BA method remains satisfactory even when the matrix A and the observation interval [0, T] are very large. Some loss of precision is observed in the two other methods, especially, when th parameters n, r and T become more and more large, see for instance Table 11 with \(n=20229\), \(r=20\) and \(T=5000\).
6.5 Experiment 5
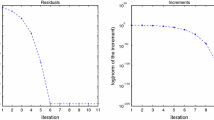
In this last experiment, we basically check Proposition 3 and Theorem 3. We show how numerically the approximation error for the solution of the algebraic equation will affect the overall approximation error for the solution of the differential equation. For this end, we consider the final time interval \(T=2000\) and the Sylvester differential equation with matrix coefficients \(A=\) rail_5177 and \(B=\) rail_1357, the right-hand side matrix is \(C=U_A\,E_1\,F_1^T\,(U_B)^T\) where \(U_A\) and \(U_B\) are the matrices obtained in the partial-rank spectral decomposition of A and \(B^T\) as explained in subsection 5.2.1. Thus, the algebraic error is \(\widetilde{E}_m=\widetilde{X}^*-\widetilde{X}_m= U_A\,(Q \odot (E_1\,F_1^T))\,(U_B)^T-\mathbb {V}_m^A\,Y_m\), where \(Y_m\) is the desired approximate solution of the projected Sylvester equation. In addition, using (42), the differential error at the time \(t=t_k\) is \(E_m(t_k) = X^*(t_k)-X_m(t_k) = U_A\,(H(t_k) \odot (E_1\,F_1^T))\,(U_B)^T - \mathbb {V}_m^A\,Y_{m,k}\), where \(Y_{m,k}\) is the approximation at \(t=t_k\) of the projected differential equation. According to Proposition 3, we should have
In Fig. 3, we plot the points \(M_k(t_k, a_k))\) for \(k=0,\ldots ,N=50\), where
We also plot the curve of the cubic spline interpolating the points \(M_k\). We observe that, in fact the inequality given in the Proposition 3 is too large and is not optimal. In this test example, the plot in Fig. 3 indicates also that there is a positive constant \( 0< C_1 < 10^{-6}\) such that the following inequality holds

Experiment 5: Curve illustrating the inequality given in Proposition 3
In this experiment, we may also illustrate Theorem 3, which is more precise then Proposition 3 and which states that we should have
In Fig. 4, we plot the points \(M_k(t_k,b_k)\) and the curve of the cubic spline interpolating the points \(M_k\) for \(k=1,\ldots ,N=50\), where

Experiment 5: Curve illustrating the inequality given in Theorem 3
In this test example, the plot in Fig. 4 indicates also that there is a positive constant \( 0< C_2 < 10^{-12}\) such that the following inequality holds
7 Conclusion
In this work, we proposed a new method for solving differential Sylvester and Lyapunov matrix equations. Unlike the recent methods proposed in [21, 38], our method avoids the integral formula, which is very benefit since its allows to reduce the computational cost. The constant solution method for solving differential Sylvester equations is related to the solution of the corresponding algebraic equation. As Krylov subspace methods are a good tool for the approximation of the exponential of matrices as well as for the solution of algebraic Sylvester (or Lyapunov) matrix equations, it can be seen that the constant solution method combined with Krylov projection methods is well suited for the solution of Sylvester (or Lyapunov) differential equations. The drawback of our method lies in the necessity to satisfy the condition \(\sigma (A)\cap \sigma (-B)=\emptyset \). The robustness and efficiency of the proposed method have been observed on many numerical examples including reference examples that we have built. The convergence of such method is proved and constructive benchmark examples are given. The proposed method is very efficient for large-scale problems by exploiting projection techniques on Krylov subspaces. Numerous numerical tests are used to show the effectiveness of such proposed method, we have reported some of them in a specific section.
Data availability
No data sets were generated or analyzed during the current work
References
Abou-Kandil, H., Freiling, G., Ionescu, V., Jank, G.: Matrix Riccati equations in control and systems theory, vol. 3. Birkhauser, Basel, Switzerland (2003)
Amato, F., Ambrosino, R., Ariola, M., Cosentino, C., De Tommasi, G.: Finite-time stability and control. Springer, (2014)
Antoulas, A.C.: Approximation of large-scale dynamical systems, vol. 6. Adv. Des. Control. SIAM Publications, Philadelphia, PA (2005)
Bartels, R.H., Stewart, G.W.: Solution of the matrix equation \(A\, X + X\, B = C\). Commun. ACM 15(9), 820–826 (1972)
Behr, M., Benner, P., Heiland, J.: Solution formulas for differential Sylvester and Lyapunov equations. Calcolo, p 56–51, (2019)
Bellman, R.: Introduction to matrix analysis, volume 6. SIAM publications, Philadelphia, PA, 2nd edition, 1997, First edition published by McGraw-Hill in (1970)
Benner, P., Mena, H.: BDF methods for large-scale differential Riccati equations. 01 (2009)
Benner, P., Mena, H.: Rosenbrock methods for solving Riccati differential equations. IEEE Transactions on Automatic Control 58(11), 2950–2956 (2013)
Benner, P., Saak, J.: A semi-discretized heat transfer model for optimal cooling of steel profiles., volume vol. 45. Lecture Notes of Computer Science and Enginerring, Springer Berlin, (2005)
Bouhamidi, A., Hached, M., Heyouni, M., Jbilou, K.: A preconditioned block Arnoldi method for large Sylvester matrix equations. Numerical Linear Algebra with Applications 20(2), 208–219 (2013)
Bouhamidi, A., Jbilou, K.: Sylvester Tikhonov-regularization methods in image restoration. J. Comput. Appl. Math. 206(1), 86–98 (2007)
Bouhamidi, A., Jbilou, K.: A note on the numerical approximate solutions for generalized Sylvester matrix equations with applications. Appl. Math. Comput. 206(2), 687–694 (2008)
Curtiss, C.F., Hirschfelder, J.O.: Integration of stiff equations. volume 38, pages 235–243 (1952). National Academy of Sciences of the United States of America
Datta, B.N.: Numerical methods for linear control systems. Academic Press, USA (2004)
Davis, T.A., Hu, Y.: The University of Florida Sparse Matrix Collection. ACM Trans. Math. Softw., 38(1), (2011)
Davison, E.: The numerical solution of \(X = A_1X + XA_2 + D\), \(X(0) = C\). IEEE Trans. Autom. Control 20(4), 566–567 (1975)
El Guennouni, A., Jbilou, K., Riquet, A.: Block Krylov subspace methods for solving large Sylvester equations. Numerical Algorithms 29, 75–96 (2002)
Elbouyahyaoui, L., Heyouni, M., Jbilou, K., Messaoudi, A.: A block Arnoldi method for the solution of the Sylvester-Observer equation. Electronic Transactions on Numerical Analysis 47, 18–36 (2017)
Golub, G., Nash, S., Loan, C.V.: A Hessenberg-Schur method for the problem \(AX+XB=C\). IEEE Transactions on Automatic Control 24(6), 909–913 (1979)
Hached, M., Jbilou, K.: Numerical solutions to large-scale differential Lyapunov matrix equations. Numerical Algorithms 79, 741–757 (2017)
Hached, M., Jbilou, K.: Computational Krylov-based methods for large-scale differential Sylvester matrix problems. Numerical Linear Algebra with Applications 25(5), e2187 (2018)
Hammarling, S.J.: Numerical solution of the stable, non-negative definite Lyapunov equation. IMA Journal of Numerical Analysis 2(3), 303–323 (1982)
Heyouni, M.: Extended Arnoldi methods for large low-rank Sylvester matrix equations. Applied Numerical Mathematics 60(11), 1171–1182 (2010)
Heyouni, M., Jbilou, K.: An extended block Arnoldi algorithm for large-scale solutions of the continuous-time algebraic Riccati equation. Electronic Transactions on Numerical Analysis 33, 53–62 (2009)
Higham, N.J.: The scaling and squaring method for the matrix exponential revised. SIAM J. Matrix Anal Appl 26(4), 1179–1193 (2005)
Horn, R.A., Johnson, C.R.: Topics in matrix analysis, volume, 2nd edn. Cambridge University Press, UK (1994)
Hu, D., Reichel, L.: Krylov-subspace methods for the Sylvester equation. Linear Algebra and its Applications 172, 283–313 (1992)
Jaimoukha, I.M., Kasenally, E.M.: Krylov subspace methods for solving large Lyapunov equations. SIAM Journal on Numerical Analysis 31(1), 227–251 (1994)
Jbilou, K.: ADI preconditioned Krylov methods for large Lyapunov matrix equations. Linear Algebra and its Applications 432(10), 2473–2485 (2010)
Konstantinov, M., Gu, D.-W., Mehrmann, V., Petkov, P.: Perturbation Theory for Matrix Equations 49, 11 (2004)
Kressner, D.: Block variants of Hammarling’s method for solving Lyapunov equations. ACM Trans. Math. Softw., 34(1), (2008)
Lancaster, P.: Explicit solutions of linear matrix equations. SIAM Review 12, 544–566 (1970)
Moler, C., Loan, C.V.: Nineteen dubiuos ways to compute the exponential of a matrix, twenty-five years later. SIAM Review 45(1), 3–000 (2003)
Penzl, T.: LYAPACK. A MATLAB Toolbox for large Lyapunov and Riccati equations, Model Reduction Problems, and Linear-Quadratic Optimal Control Problems, (2000)
Saad, Y.: Numerical solution of large Lyapunov equations. In: in Signal Processing, Scattering and Operator Theory, and Numerical Methods, Proc. MTNS-89, p 503–511, (1990), Birkhauser
Saad, Y.: Analysis of some Krylov subspace approximations to the matrix exponential operator. SIAM J. Numer. Anal. 29(1), 209–228 (1992)
Saad, Y.: xIterative methods for sparse linear systems. Society for Industrial and Applied Mathematics, second edition, (2003)
Sadek, E.M., Bentbib, A., Sadek, L., Alaoui, H.: Global extended Krylov subspace methods for large-scale differential Sylvester matrix equations. J Appl Math Comput 62, 165–177 (2019)
Simoncini, V.: A new iterative method for solving large-scale Lyapunov matrix equations. SIAM Journal on Scientific Computing 29(3), 1268–1288 (2007)
Simoncini, V.: Computational methods for linear matrix equations. SIAM Review 58(3), 377–441 (2016)
Sorensen, D.C., Zhou, Y.: Direct methods for matrix Sylvester and Lyapunov equations. Journal of Applied Mathematics 2003(6), 277–303 (2003)
Acknowledgements
We would like to thank the anonymous reviewer for his comments, criticisms and suggestions that helped us improve this manuscript.
Author information
Authors and Affiliations
Contributions
The three authors contributed equally to this work.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Bouhamidi, A., Elbouyahyaoui, L. & Heyouni, M. The constant solution method for solving large-scale differential Sylvester matrix equations with time invariant coefficients. Numer Algor 96, 449–488 (2024). https://doi.org/10.1007/s11075-023-01653-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11075-023-01653-3
Keywords
- Krylov subspace methods
- Block Arnoldi
- Matrix differential Sylvester equation
- Dynamical systems
- Control
- Ordinary differential equations