
Abstract
Exact solutions of higher-dimensional nonlinear equations takes a major place in the study of nonlinear phenomena observed in nature. In this article, some new kink type solutions are investigated for the new (3+1)-dimensional Boiti-Leon-Manna-Pempinelli(BLMP) equation. Firstly, a variety of solutions are obtained by Hirota’s bilinear form, which include kink type wave solution, periodic solitary wave solutions and singular solitary wave solutions using extended homoclinic test approach. Secondly, solutions with three wave form are obtained by generalized three wave method. The extended homoclinic test approach is also used to construct solutions with a tail which explain some physical phenomenon. Moreover, some figures of the solutions are shown behind.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear science is a vital discovery in the area of natural science since the 20th century, and its rapid development has made it one of the popular topics in mathematical physics. In recent decades, researches on soliton solutions [1],rogue waves solutions [2], periodic wave solutions [3], interaction solutions [4] and lump solutions [5] of nonlinear partial differential equations (NLPDEs) have received increasing attention from experts and scholars.
Recently, nonlinear evolution equations (NLEEs) has wide application in various fields. Various methods have been proposed to explore nonlinear phenomena. For example, three-wave method [6, 7], tanh method [8], Bäcklund transformation [9], Darboux transformation [10], Exp-function method [11], Hirota bilinear method [12], homogeneous balance method [13], the generally projective F-expansions [14], (G’/G)-expansion method [15], auxiliary equation method [16], Riccati equation method [17], simplest equation method [18, 19], etc.
Wazwaz proposed a new (3+1)-dimensional Boiti-Leon-Manna-Pempinelli (BLMP) equation which has time dependent coefficients. It’s written as the form [20]
It comes from one of the most typical NLEEs, which is the (3+1)-dimensional BLMP equation
which includes three expressions which consist the derivatives \(u_y + u_z\). The Eq. (1.1) has the additional derivative \(u_x\) to every expressions.
Let \(F(t)=1, G(t)=1, H(t)=1\), Eq.(1.1) reduces to the a equation mainly discussed in this paper with constant coefficients
These equations describe a kind of physical phenomenon in the natural world, that is, the propagation of waves in incompressible fluid. To confirm its integrability, the Painlév analysis is used by Wazwaz to obtain the compatibility condition. By the simplified Hirota’s method and the complex Hirota’s criteria, the multiple soliton solutions and multiple complex soliton solutions are determined. [20]
Based on the new (3+1)-dimensional BLMP equation given by Wazwaz, scholars have obtained many new research achievements. Liu and Wazwaz further get breather wave solutions, lump type solutions of equation (1.3) in Ref. [21]. Yuan presented more kinds of the interaction solutions, including lump and N-soliton solutions. The breather-wave solution is studied in Ref. [22]. Han and Bao investigated the equation (1.1) with time-dependent coefficients on the basis of the Hirota bilinear method, and obtained the mixed high-order lump N-soliton solutions and the hybrid solutions in Ref. [23]. To construct test functions, Qiao, Zhang and Yue used a specific bilinear neural network framework. Three kinds of periodic-type solutions of Eq. (1.3) are given in Ref. [24].
The paper is structured as follows, Sect. 2 obtains kink-shaped solitary wave solutions, singular solitary wave solutions, periodic wave solutions and periodic kink wave solutions by using the extended homoclinic test approach. In Sect. 3 a three-wave method is used to find three-wave solutions. We get periodic kink wave solutions, periodic cross kink wave solutions and periodic wave solutions. Section 4 obtains kink-shaped solitary wave solutions with tails, by using the extended homoclinic test approach. Section 5 is dedicated to giving the conclusion.
2 Extended homoclinic test approach
The new (3+1)-dimensional BLMP equation with constant coefficients has been written as
According to the function transformation
the Hirota bilinear form of Eq. (2.1) is
Then Eq. (2.1) becomes
Let f take the form
where \(\xi _i=a_i x+b_i y+c_i z+d_i t, k_i\in {\mathbb {R}}, a_i,b_i,c_i,d_i\in {\mathbb {C}}( i=1,2) \)are undetermined constants.
Substituting Eq. (2.5) into (2.3) and setting coefficients of
and the constant term to zero, we obtain a set of algebraic equations (2.6) with respect to \(k_i \) and \( a_i,b_i,c_i,d_i, (i=1,2).\)
Solving Eq. (2.6), we have following conclusion.
2.1 Solution in the situation \(k_1 = 0\)
If \(k_1=0\), we have some cases.
Case 1
I.
where \(a_1, b_1, b_2, c_1, c_2, d_1, d_2, \) and \(k_2 \) are free parameters.
II.
where \(a_1, a_2, b_1, b_2, c_1, c_2, d_1\) and \( k_2 \) are free parameters.

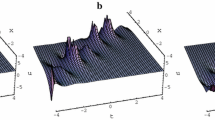
The singular solitary wave solution \(u_3\) at \(a_1=1, c_1=1, a_2=1, b_2=1, k_1=1, z=0, {\textbf {a}} t=\)-\(1, {\textbf {b}} t=0, {\textbf {c}} t=1\)

The singular solitary wave solution \(u_5\) at \(a_2=1, b_1=1, b_2=1, k_1=1, x=0, {\textbf {a}} t=-5, {\textbf {b}} t=0 ,{\textbf {c}} t=5\)
Substituting Eq. (2.7–2.8) into Eq. (2.5) and Eq. (2.2), we obtain the solutions in the case of \(i=1\) and \(i=2\). The corresponding solutions are given by
where
In particular, solutions Eq. (2.9) can be expressed as
where
It is easy to know that \(u_1\), \(u_2\) are kink-shaped solitary wave solutions.
To simplify the results, the sign of \(k_2\) will not be discussed in each case later.
2.2 Solution in the situation \(k_2=0\)
If \(k_2=0\), we have
Case 2
where \(a_1, a_2, b_2, c_1, c_2,\) and \( k_1 \) are free parameters.
Substituting Eq. (2.12) into Eq. (2.2) and Eq. (2.5), the solutions are yielded that
where \(\zeta _1=\left( {a_1} x +\left( -{a_1} -{c_1} \right) y +{c_1} z +\left( {a_1}^{3}-3 {a_1} \right. \right. \left. \left. {a_2}^{2}\right) t \right) \), \(\zeta _2=-{a_2} x -{b_2} y -{c_2} z -\left( 3{a_1}^{2} {a_2} -{a_2}^{3}\right) t\).
In particular, solution Eq. (2.13) can be expressed as
where \(\zeta _1=\left( {a_1} x +\left( -{a_1} -{c_1} \right) y +{c_1} z +\left( {a_1}^{3}-3 {a_1} \right. \right. \left. \left. {a_2}^{2}\right) t \right) \), \(\zeta _2=-{a_2} x -{b_2} y -{c_2} z -\left( 3{a_1}^{2} {a_2} -{a_2}^{3}\right) t\).
Case 3
The case of complex solutions.
I.
where \( a_1, a_2, b_1, c_1, c_2,\) and \( k_1 \) are free parameters. and
II.
where \( a_2, c_1, c_2, d_2 \) and \( k_1 \) are free parameters.
Substituting Eq. (2.15–2.16) into Eq. (2.5) and Eq. (2.2), we obtain \( a^*=a_1\), \(i=1\) and \( a^*=\pm \text {i}a_2\), \(i=2\), respectively. The corresponding solutions are given by
where \(\zeta _1= {a_1} x +{b_1} y +{c_1} z+4 {a_1}^{3} t,\) \(\eta _1=-{a_2} x -b_2y-{c_2} z -(\pm \left( 3 \,\mathrm {i}{a_1}^{3}+3 \,\mathrm {i} {a_1}{a_2}^{2}\right) +3{a_2}{a_1}^{2}-{a_2}^{3})t,\) \(\zeta _{2}=\left( \pm \mathrm {i}\right) {a_2} x +\left( \left( \mp \mathrm {i}\right) {a_2} -{c_1} \right) y +{c_1} z +4 \left( \mp \mathrm {i}\right) a_2^{3} t ,\) \(\eta _{2}=-{a_2} x -\left( -{a_2} -{c_2} \right) y -{c_2} z -{d_2} t. \)
Here, the form of \(b_2\) is shown in Eq. (2.15). In particular, solution Eq. (2.17) can be expressed as
where \(\zeta _1= {a_1} x +{b_1} y +{c_1} z+4 {a_1}^{3} t,\) \(\eta _1=-{a_2} x -b_2y-{c_2} z -(\pm \left( 3 \,\mathrm {i}{a_1}^{3}+3 \,\mathrm {i} {a_1}{a_2}^{2}\right) +3{a_2}{a_1}^{2}-{a_2}^{3})t,\) \(\zeta _{2}=\left( \pm \mathrm {i}\right) {a_2} x +\left( \left( \mp \mathrm {i}\right) {a_2} -{c_1} \right) y +{c_1} z +4 \left( \mp \mathrm {i}\right) a_2^{3} t ,\) \(\eta _{2}=-{a_2} x -\left( -{a_2} -{c_2} \right) y -{c_2} z -{d_2} t. \)
Case 4
where \( a_2, b_1, b_2, c_1, c_2,\) and \( k_1 \) are free parameters.
Substituting Eq. (2.19) into Eq. (2.2) and Eq. (2.5), the solutions are yielded that
where \(\zeta _1={a_2}^{3} t -{a_2} x -{b_2} y -{c_2} z\). In particular, solution Eq. (2.20) can be expressed as
where \(\zeta _1={a_2}^{3} t -{a_2} x -{b_2} y -{c_2} z\).
2.3 Solution in the situation \(k_1\ne 0\) and \( k_2\ne 0\)
If \(k_1\ne 0\) and \(k_2\ne 0\), we have following conclusion.
Case 5
where \( a_2, b_1, c_1, c_2, k_1 \) and \( k_2 \) are free parameters.
Substituting Eq. (2.22) into Eq. (2.2) and Eq. (2.5), the solutions are yielded that
where \(\zeta _{1}={a_2} x +\left( -{a_2} -{c_2} \right) y +{c_2} z -{a_2}^{3} t \), \(\zeta _{2}={b_1} y +{c_1} z \).
In particular, the solution Eq. (2.23) can be expressed as
where \(\zeta _{1}={a_2} x +\left( -{a_2} -{c_2} \right) y +{c_2} z -{a_2}^{3} t \),\(\zeta _{2}={b_1} y +{c_1} z \).

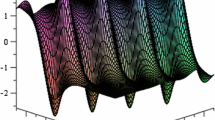
The periodic kink wave solution \(u_6\) at \(a_2=1, b_1=1, c_1=1, c_2=1, k_1=1, k_2=1, x=0, {\textbf {a}}t=-5 , {\textbf {b}} t=0 , {\textbf {c}} t=5\)

The periodic solitary wave solution \(u_7\) at \(a_1=1,b_2=1, c_1=1, c_2=1, k_1=1, k_2=1, {\textbf {a}} z=0,t=0, {\textbf {b}} x=0, t=0\)

The periodic kink wave solution \(u_8\) at \(i=1, a_2=2, b_1=1, c_1=1, c_2=2, d_2=2, k_1=1, k_2=2, z=0, \mathrm{at}=-5, \mathrm{bt}=0, \mathrm{ct}=5 \)
Case 6
where \( a_1, b_2, c_1, c_2, k_1 \) and \( k_2 \) are free parameters.
Substituting Eq. (2.25) into Eq. (2.2) and Eq. (2.5), we obtain the solution
where \(\zeta _{1}={a_1} x +\left( -{a_1} -{c_1} \right) y +{c_1} z +a_1^{3} t \), \(\zeta _{2}=b_2y +{c_2} z \).
In particular, the solution Eq. (2.26)can be expressed as
where \(\zeta _{1}={a_1} x +\left( -{a_1} -{c_1} \right) y +{c_1} z +a_1^{3} t \), \(\zeta _{2}=b_2y +{c_2} z \).
Case 7
where \( a_1, b_2, c_1, c_2, d_1, d_2, k_1 \) and \( k_2 \) are free parameters.
Substituting Eq. (2.28) into Eq. (2.5) and Eq. (2.2), we obtain
where \(\zeta _{1}={a_1} x +\left( -{a_1} -{c_1} \right) y +{c_1} z +{d_1} t \), \(\zeta _{2}=\left( -{c_2} -{b_2} \right) x +{b_2} y +{c_2} z +{d_2} t\).
In particular, the solution Eq. (2.29) can be expressed as
where \(\zeta _{1}={a_1} x +\left( -{a_1} -{c_1} \right) y +{c_1} z +{d_1} t \), \(\zeta _{2}=\left( -{c_2} -{b_2} \right) x +{b_2} y +{c_2} z +{d_2} t\).
Case 8
Compared with the case7, the solution obtained is complex solutions.
where \( a_2, b_1, b_2, c_1, c_2, k_1 \) and \( k_2 \) are free parameters.
Substituting Eq. (2.31) into Eq. (2.2) and Eq. (2.5), we obtain
where \(\zeta _{1}=\pm \mathrm {i} {a_2} x +{b_1} y +{c_1} z \mp 4\mathrm {i}{a_2}^{3} t \), \(\zeta _{2}=-4 {a_2}^{3} t +{a_2} x +{b_2} y +{c_2} z\).
In particular, the solution Eq. (2.32) can be expressed as
where \(\zeta _{1}=\pm \mathrm {i} {a_2} x +{b_1} y +{c_1} z \mp 4\mathrm {i}{a_2}^{3} t \), \(\zeta _{2}=-4 {a_2}^{3} t +{a_2} x +{b_2} y +{c_2} z\).
3 Three wave method
Now, the equation (1.3) is considered by three wave method. We assume it has three wave solutions, which takes the form
where
are undetermined constants.
Substituting Eq. (3.1) into Eq. (2.5) and setting coefficients of
and the constant term to zero, a set of nonlinear algebraic equations Eq. (3.2).
Solve Eq. (3.2), we have following conclusion.
In general, we only consider the case where the free parameters are real numbers, and let \(\delta _1 \ne 0,\delta _2 \ne 0 \) and \( \delta _3\ne 0\).
In addition, if \(\delta _2 = 0\), Eq. (3.1) has the same form as Eq. (2.5).
Case 1
where \( Q_1, Q_2, Q_3, P_1, P_2, P_3, w_1, w_2 \) and \( w_3 \) are free parameters.
Substituting Eq. (3.3) into Eq. (2.2) and Eq. (3.1), we obtain the solution
where \(\eta _1={P_1} x +{Q_1} y +\left( -{Q_1} -{P_1} \right) z +{w_1} t.\) \(\eta _2={P_2} x +{Q_2} y +\left( -{Q_2} -{P_2} \right) z +{w_2} t .\) \(\eta _3={P_3} x +{Q_3} y +\left( -{Q_3} -{P_3} \right) z +{w_3} t .\)
In particular, solution Eq. (3.4) can be expressed as
where \(\eta _1={P_1} x +{Q_1} y +\left( -{Q_1} -{P_1} \right) z +{w_1} t.\) \(\eta _2={P_2} x +{Q_2} y +\left( -{Q_2} -{P_2} \right) z +{w_2} t .\) \(\eta _3={P_3} x +{Q_3} y +\left( -{Q_3} -{P_3} \right) z +{w_3} t .\)

The periodic kink wave solution \(u_1\) at \( \delta _1=1, \delta _2=1, \delta _3=1, Q_1=1, Q_2=1, Q_3=1, P_1=1, P_2=1, P_3=1, w_1=2, w_2=2, w_3=2, z=0, {\textbf {a}} t=-5, {\textbf {b}} t=0, {\textbf {c}} t=5\)
Case 2
where \( Q_1, Q_2, Q_3, R_3, w_1 \) and \( w_2 \) are free parameters.
Substituting Eq. (3.5) into Eq. (2.2) and Eq. (3.1), we obtain the solution
where \(\eta _1=-\root 3 \of {w_1} x +{Q_1} y +\left( -{Q_1} +\root 3 \of {w_1}\right) z +{w_1} t\), \(\eta _2=\root 3 \of {w_2} x +{Q_2} y +\left( -{Q_2} -\root 3 \of {w_2}\right) z +{w_2} t\), \(\eta _3={Q_3} y +{R_3} z\).
In particular, solution Eq. (3.7) can be expressed as
where \(\eta _1=-\root 3 \of {w_1} x +{Q_1} y +\left( -{Q_1} +\root 3 \of {w_1}\right) z +{w_1} t\), \(\eta _2=\root 3 \of {w_2} x +{Q_2} y +\left( -{Q_2} -\root 3 \of {w_2}\right) z +{w_2} t\), \(\eta _3={Q_3} y +{R_3} z\).

The periodic cross kink wave solution \(u_2\) at \( \delta _1=1, \delta _2=1, \delta _3=1, Q_1=2, Q_2=1, Q_3=1, R_3=1, w_1=1, w_2=1, z=0, {\textbf {a}} t=-5, {\textbf {b}} t=0, {\textbf {c}} t=5\)
Case 3
where \( Q_1, Q_2, Q_3, R_2, w_1 \) and \( w_3 \) are free parameters.
Substituting Eq. (3.9) into Eq. (2.2) and Eq. (3.1), we obtain the solution
where \(\eta _1=-\root 3 \of {w_1} x +{Q_1} y +{R_1} z +{w_1} t\), \(\eta _2=-\root 3 \of {w_3} x +{Q_3} y +\left( -{Q_3} +\root 3 \of {w_3}\right) z +{w_3}t\), \(\eta _3={Q_2} y +{R_2} z\).
In particular, solution Eq. (3.10) can be expressed as
where \(\eta _1=-\root 3 \of {w_1} x +{Q_1} y +{R_1} z +{w_1} t\), \(\eta _2=-\root 3 \of {w_3} x +{Q_3} y +\left( -{Q_3} +\root 3 \of {w_3}\right) z +{w_3}t\), \(\eta _3={Q_2} y +{R_2} z\).

The periodic kink wave solution \(u_3\) at \( \delta _1=1, \delta _2=1, \delta _3=1, Q_1=1, Q_2=1, Q_3=3, R_1=1, R_2=1, w_1=1, w_2=1, w_3=1, x=0, {\textbf {a}} t=-5, {\textbf {b}} t=0, {\textbf {c}} t=5\)
Case 4
where \( Q_1, Q_2, Q_3, R_2, R_3, \) and \( w_1 \) are free parameters.
Substituting Eq. (3.12) into Eq. (2.2) and Eq. (3.1), we obtain the solution
where \(\eta _1=-\root 3 \of {w_1} x +{Q_1} y +\left( -{Q_1} +\root 3 \of {w_1}\right) z +{w_1} t\), \(\eta _2={Q_2} y +{R_2} z\), \(\eta _3={Q_3} y +{R_3} z \).
In particular, solution Eq. (3.13) can be expressed as
where \(\eta _1=-\root 3 \of {w_1} x +{Q_1} y +\left( -{Q_1} +\root 3 \of {w_1}\right) z +{w_1} t\), \(\eta _2={Q_2} y +{R_2} z\), \(\eta _3={Q_3} y +{R_3} z \).

The periodic cross kink wave solution \(u_4\) at \( \delta _1=1, \delta _2=1, \delta _3=1, Q_1=2, Q_2=1, Q_3=1, R_2=1, R_3=1, w_1=1, x=0, {\textbf {a}} t=-5, {\textbf {b}} t=0, {\textbf {c}} t=5\)
Case 5
where \( Q_1, Q_2, Q_3, R_1, w_2 \) and \( w_3 \) are free parameters.
Substituting Eq. (3.15) into (2.2) and Eq. (3.1), we obtain the solution
where \(\eta _1=\root 3 \of {w_2} x +{Q_2} y +\left( -{Q_2} -\root 3 \of {w_2}\right) z +{w_2} t\) , \(\eta _2=-\root 3 \of {w_3} x +{Q_3} y +\left( -{Q_3} +\root 3 \of {w_3}\right) z +{w_3} t\), \(\eta _{3}={Q_1} y +{R_1} z\).
In particular, solution Eq. (3.16) can be expressed as
where \(\eta _1=\root 3 \of {w_2} x +{Q_2} y +\left( -{Q_2} -\root 3 \of {w_2}\right) z +{w_2} t\) , \(\eta _{2}=-\root 3 \of {w_3} x +{Q_3} y +\left( -{Q_3} +\root 3 \of {w_3}\right) z +{w_3} t\), \(\eta _{3}={Q_1} y +{R_1} z\).

The periodic cross kink wave solution \(u_5\) at \( \delta _1=1, \delta _2=1, \delta _3=1, Q_1=1, Q_2=1, Q_3=2, R_1=1, w_2=1, w_3=1, x=0, {\textbf {a}} t=-5, {\textbf {b}} t=0, {\textbf {c}} t=5\)
Case 6
where \( Q_1, Q_2, Q_3, R_1, R_3 \) and \( w_2 \) are free parameters.
Substituting Eq. (3.18) into Eq. (2.2) and Eq. (3.1), we obtain the solution
where \(\eta _{1}=\root 3 \of {w_2} x +{Q_2} y +\left( -{Q_2} -\root 3 \of {w_2}\right) z +{w_2} t\), \(\eta _{2}={Q_1} y +{R_1} z\), \(\eta _{3}={Q_3} y +{R_3} z \).
In particular, solution Eq. (3.19) can be expressed as
where \(\eta _{1}=\root 3 \of {w_2} x +{Q_2} y +\left( -{Q_2} -\root 3 \of {w_2}\right) z +{w_2} t\), \(\eta _{2}={Q_1} y +{R_1} z\), \(\eta _{3}={Q_3} y +{R_3} z \).

The periodic wave solution \(u_6\) at \(\delta _1=1, \delta _2=1, \delta _3=1, Q_1=1, Q_2=1, Q_3=1, R_1=1, R_3=1, w_2=1, {\textbf {a}} z=0,t=0, {\textbf {b}} x=0, t=0 \)
Case 7
where \( Q_1, Q_2, Q_3, R_1, R_2 \) and \( w_3 \) are free parameters.
Substituting Eq. (3.21) into Eq. (3.1) and Eq. (2.2), we obtain the solution
where \(\eta _{1}=-\root 3 \of {w_3} x +{Q_3} y +\left( -{Q_3} +\root 3 \of {w_3}\right) z +{w_3} t \), \(\eta _{2}={Q_1} y +{R_1} z\), \(\eta _{3}={Q_2} y +{R_2} z\).
In particular, solution Eq. (3.22) can be expressed as
where \(\eta _{1}=-\root 3 \of {w_3} x +{Q_3} y +\left( -{Q_3} +\root 3 \of {w_3}\right) z +{w_3} t \), \(\eta _{2}={Q_1} y +{R_1} z\), \(\eta _{3}={Q_2} y +{R_2} z\).
The figure of \(u_7\) is similar to the figure of \(u_4\), and it is a periodic cross kink wave solution.
4 Non-traveling wave solutions
In this section, we use the extended homoclinic test approach in Ref. [25] to get non-traveling wave solutions, which in form
where \(\xi =x+my+nt+\theta (z)\), m, n are two nonzero constants, \(\varphi (\xi ,t), q(z) \) and \(\theta (z)\) are three functions undetermined. Substituting Eq. (4.1) into (2.1), we obtain
To simplify Eq. (4.2), we let
From Eq. (4.3), we get
where c is the integral constant. Therefore, in the condition of \((1+m+\theta ' (z))\ne 0 \), Eq. (4.2) reduces to
Integrating Eq. (4.5) once with respect to \(\xi \). Let constant \(c=0\), we get
Let
Substituting Eq. (4.7) into (4.6), one gets
In order to solving Eq. (4.8), a nonlinear function transformation of dependent variable are used
where \(\phi (\xi ,t)\) will be determined later. Substituting Eq. (4.9) into Eq. (4.8), one can get a bilinear equation
Let the solution in the form
where \(\zeta _i=a_i \xi +b_i t, k_i\in {\mathbb {R}}; a_i,b_i\in {\mathbb {C}}(i=1,2)\) are undetermined constants.

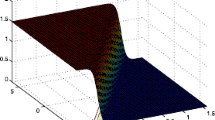
The exact kink-like solution with tail \(u_1\) at \( x=y=0,a_2=1, k_2=1,n=3,m=1,c=0, {\textbf {a}} \theta (z)=z, {\textbf {b}} \theta (z)=z^2, {\textbf {c}} \theta (z)=z^3\)
Substituting Eq. (4.11) into (4.10) and setting coefficients of \(\cos ^2(\zeta _1)\), \(\cos (\zeta _1) \exp (\zeta _2)\), \(\cos (\zeta _1) \exp (-\zeta _2)\),\(\sin ^2(\zeta _1)\), \(\sin (\zeta _1) \exp (\zeta _2)\), \(\sin (\zeta _1) \exp (-\zeta _2)\) and the constant term to zero, a set of nonlinear algebraic equations with respect to \( a_i, b_i\) and \(k_i,(i = 1, 2)\) are given
Solving Eq. (4.12), we have the following results.
Case1
where \( a_1, a_2 , b_1 \) and \( k_2 \) are free parameters.
Collecting Eq. (4.1), (4.4), (4.7), (4.9), (4.11), (4.13), we obtain the solution
where\(\lambda _1=a_2 \left( x+my+ \left( n-4a_2^2 \right) t+\theta (z) \right) .\)
In particular, solution Eq. (4.14) can be expressed as
where\(\lambda _1=a_2 \left( x+my+ \left( n-4a_2^2 \right) t+\theta (z) \right) .\)
Case 2
where \( a_2 \) and \( k_1 \) are free parameters.
Collecting Eq. (4.1), (4.4), (4.7), (4.9), (4.11), (4.17), we obtain the solution
where \(\lambda _2=\frac{3^{\frac{3}{4}} \sqrt{2}}{6}\, \left( \left( \pm \text {i}\right) \pm 1\right) {a_2} \big (4 {a_2}^{2} t +m y +n t +\theta (z)+x \big )\)and \(\lambda _3=-4 {a_2}^{2} t +m y +n t +\theta \left( z \right) +x\).
In particular, solution Eq. (4.18) can be expressed as
where \(\lambda _2=\frac{3^{\frac{3}{4}} \sqrt{2}}{6}\, \left( \left( \pm \text {i}\right) \pm 1\right) {a_2} \big (4 {a_2}^{2} t +m y +n t +\theta \left( z \right) +x \big )\) and \(\lambda _3=-4 {a_2}^{2} t +m y +n t +\theta \left( z \right) +x\).
Case 3
where \( a_2 \) and \( k_1 \) are free parameters.
Collecting Eqs. (4.20, 4.11, 4.9, 4.7, 4.4) with Eq. (4.1), we obtain the solution
where \(\lambda _4=a_2\left( x+my+\left( n-a_2^2\right) t+\theta (z) \right) \).
In particular, solution Eq. (4.21) can be expressed as
The figure of \(u_4\) is similar to the figure of \(u_1\), and it is a kink-like solution with tail.
5 Discussion and conclusions
In this work, we mainly investigate the new (3+1)-dimensional BLMP equation, which is firstly proposed by Wazwaz. In Sect. 2, it is devoted to use the extended homoclinic test approach to construct solutions. If \(k_1=0\), a kink-shaped solitary wave solution is obtained, if \(k_2=0\), different kinds of singualr solitary wave solutions are obtained; if \(k_1\ne 0\) and \(k_2 \ne 0\), we get 2 kinds of periodic kink wave solutions and periodic solitary wave solution. In Sect. 3, we use the three wave method to construct three wave solutions. It is obviously that, if \( \delta _2 = 0\), the form of the solution constructed is the same as extended homoclinic test approach. In this section, we let the free parameters are real numbers and let \( \delta _1 \ne 0, \delta _2 \ne 0, \) and \(\delta _3 \ne 0.\) And the periodic kink wave solutions, periodic cross kink wave solutions and periodic wave solutions are obtained. In Sect. 4, we also use the extended homoclinic test approach to construct kink-shaped solitary wave solutions, what is different from the second part is that these solutions have a tail. These results reflect that the methods used in this paper are effective for seeking solutions of higher dimensional NLEEs.
Data Availability
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation, to any qualified researcher.
References
Wazwaz, A.M.: Two-mode fifth-order kdv equations: necessary conditions for multiple-soliton solutions to exist. Nonlinear Dyn. 87(3), 1685–1691 (2017)
Chen, W., Chen, H.L., Dai, Z.D.: Rational homoclinic solution and rogue wave solution for the coupled long-wave-short-wave system. Pramana J. Phys. 86(3), 713–717 (2016)
Liu, F.Y., Gao, Y.T., Yu, X., Ding, C.C.: Wronskian, Gramian, Pfaffian and periodic-wave solutions for a (3+1)-dimensional generalized nonlinear evolution equation arising in the shallow water waves. Nonlinear Dyn. 108(2), 1599–1616 (2022)
Ma, Y.L., Wazwaz, A.M., Li, B.Q.: New extended Kadomtsev-Petviashvili equation: multiple soliton solutions, breather, lump and interaction solutions. Nonlinear Dyn. 104(2), 1581–1594 (2021)
Tan, W., Dai, Z.D.: Spatiotemporal dynamics of lump solution to the (1+1)-dimensional Benjamin-Ono equation. Nonlinear Dyn. 89(4), 2723–2728 (2017)
Zhao, Z.H., Dai, Z.D., Wang, C.J.: Extend three-wave method for the (1+ 2)-dimensional Ito equation. Appl. Math. Comput. 217(5), 2295–2300 (2010)
Guo, Y.F., Li, D.L., Wang, J.X.: The new exact solutions of the Fifth-Order Sawada-Kotera equation using three wave method. Appl. Math. Lett. 94, 232–237 (2019)
Wazwaz, A.M.: The tanh method for traveling wave solutions of nonlinear equations. Appl. Math. Comput. 154(3), 713–723 (2004)
Zhao, X., Tian, B., Tian, H.Y., Yang, D.Y.: Bilinear Bäcklund transformation, Lax pair and interactions of nonlinear waves for a generalized (2+1)-dimensional nonlinear wave equation in nonlinear optics/fluid mechanics/plasma physics. Nonlinear Dyn. 103(2), 1785–1794 (2021)
Song, J.Y., Xiao, Y., Zhang, C.P.: Darboux transformation, exact solutions and conservation laws for the reverse space-time Fokas-Lenells equation. Nonlinear Dyn. 107, 3805–3818 (2022)
Zhang, S.: Application of Exp-function method to a KdV equation with variable coefficients. Phys. Lett. A 365(5–6), 448–453 (2007)
Zhang, Z., Li, B., Chen, J., Guo, Q.: Construction of higher-order smooth positons and breather positons via Hirota’s bilinear method. Nonlinear Dyn. 105, 2611–2618 (2021)
Wang, M.L.: Exact solutions for a compound KdV-Burgers equation. Phys. Lett. A 213(5–6), 279–287 (1996)
Wang, M.L., Li, X.: Applications of F-expansion to periodic wave solutions for a new Hamiltonian amplitude equation. Chaos Solitons Fract. 24(5), 1257–1268 (2005)
Li, L.X., Wang, M.L.: The (G’/G)-expansion method and travelling wave solutions for a higher-order nonlinear schrödinger equation. Appl. Math. Comput. 208(2), 440–445 (2009)
Jiong, S.: Auxiliary equation method for solving nonlinear partial differential equations. Phys. Lett. A 309(5–6), 387–396 (2003)
Yan, Z.: Generalized method and its application in the higher-order nonlinear Schrödinger equation in nonlinear optical fibres. Chaos Solitons Fract. 16(5), 759–766 (2003)
Bilige, S., Chaolu, T.: An extended simplest equation method and its application to several forms of the fifth-order KdV equation. Appl. Math. Comput. 216(11), 3146–3153 (2010)
Bilige, S., Chaolu, T., Wang, X.: Application of the extended simplest equation method to the coupled Schrödinger-Boussinesq equation. Appl. Math. Comput. 224, 517–523 (2013)
Wazwaz, A.M.: Painlevé analysis for new (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equations with constant and time-dependent coefficients. Int. J. Numer. Methods Heat Fluid Flow 30(9), 4259–4266 (2020)
Liu, J.G., Wazwaz, A.M.: Breather wave and lump-type solutions of new (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equation in incompressible fluid. Math. Meth. Appl. Sci. 44(2), 2200–2208 (2021)
Yuan, N.: Rich analytical solutions of a new (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equation. Results Phys. 22, 103927 (2021)
Han, P.F., Bao, T.: Dynamic analysis of hybrid solutions for the new (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equation with time dependent coefficients in incompressible fluid. Eur. Phys. J. Plus 136(9), 1–16 (2021)
Qiao, J.M., Zhang, R.F., Yue, R.X., Rezazadeh, H., Seadawy, A.R.: Three types of periodic solutions of new (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equation via bilinear neural network method. Math. Meth. Appl. Sci. 45(9), 5612–5621 (2022)
Xu, Y.Q., Zheng, X.X., Xin, J.: Abundant new non-traveling wave solutions for the (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equation. J. Appl. Anal. Comput. 11(4), 2052–2069 (2021)
Funding
The paper was supported by National Natural Science Foundation of China Nos. 11861013, 11771444; Guangxi Science and Technology Base and Talent Project No. AD21238019; the Fundamental Research Funds for the Central Universities, China University of Geosciences(Wuhan) No. 2018061.
Author information
Authors and Affiliations
Contributions
These authors contributed equally to this work.
Corresponding author
Ethics declarations
Competing interests
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chen, X., Guo, Y. & Zhang, T. Some new kink type solutions for the new (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation. Nonlinear Dyn 111, 683–695 (2023). https://doi.org/10.1007/s11071-022-07856-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07856-y