
Abstract
The extended homoclinic test approach is an efficient and well-developed approach to solve nonlinear partial differential equations. In this paper, the (2+1)- and (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation are investigated by using this approach. Some exact solutions including kinky periodic solitary-wave solutions, periodic soliton solutions and kink solutions are obtained. Moreover, the strangely mechanical features of these solutions are studied. These results enrich the variety of the dynamics of nonlinear wave model.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Many significant phenomena and dynamic processes in physics, chemistry, biology and mechanics can be represented by nonlinear partial differential equations (NLPDEs). When we want to understand the mechanism of phenomena in nature which have described by NLPDEs, we have to obtain the exact solutions of the NLPDEs. Searching for exact solutions of NLPDEs has long been an important work for both mathematicians and physicists. In recent years, quite a few methods have been proposed to solve solutions of NLPDEs, such as the tanh-function method [1], the sech-function method [2], the homogeneous balance method [3], the inverse scattering transformation approach [4], the Bäcklund transformation (BT) [5], the Darboux transformation [6], the bilinear method [7], Painlevé analysis [8], the Wronskian technique [9] and the exp-function method [10, 11], and so on. It is well known that the study of soliton generating NLPDEs are of great interest not only in (1+1)-dimensional systems, but also in (2+1)- and (3+1)-dimensional systems. Recently, Dai et al. [12] constructed the extended homoclinic test approach (EHTA) to seek solitary-wave solution of high dimensional nonlinear wave system. Some exact solutions including breather type soliton, periodic type of soliton and two soliton solutions are obtained [12–17]. In this letter, we solve the (2+1)- and (3+1)-dimensional BLMP equation by using the extended homoclinic test approach (EHTA) and study the strangely mechanical features of these wave solutions.
This paper is organized as follow: in Sect. 2, a direct formulation of the procedure for the extended homoclinic test approach (EHTA) is made. In Sect. 3, we solve the (2+1)-dimensional BLMP equation by using EHTA. In Sect. 4, we apply EHTA to the (3+1)-dimensional BLMP equation. We conclude the paper in the final section.
2 The extended homoclinic test approach
To explain these fundamental steps of the extended homoclinic test approach, we consider a general form of a (3+1)-dimensional nonlinear partial differential equation as
where \(u=u(x,y,z,t)\) and \(F\) is a polynomial of \(u\) and its derivatives.
The basic steps of the EHTA can be expressed in the following form, (for more details see [12]).
Step 1 We make a transformation as
where \(f\) is a new unknown function. By substituting Eq. (2) into Eq. (1), we can obtain the Hirota’s bilinear form
where \(D_t,\,D_x ,\,D_y \) and \(D_z\) are Hirota’s bilinear operators [18] which is defined by
where the right-hand side is computed in
Step 2 To obtain the exact solutions of Eq. (3), we suppose the standard ansatz in EHTA as
where \(\xi _i =a_i x+b_i y+c_i z+d_i t,\,a_i ,b_i ,c_i ,d_i \) and \(\delta _i,\, (i=1,2)\) are unknown constants to be determined later. Substituting Eq. (4) into (3), and collecting the coefficients of \(\sin (\xi _2),\,\cos (\xi _2)\) and \(e^{j\xi _1},\,j=-1,0,1\),then equating coefficients of these terms to zero, we obtain a set of algebraic equations.
Step 3 Solving the set of algebraic equation defined by step 4 with the help of
Maple, we can find solutions of \(a_i ,b_i ,c_i ,d_i \) and \(\delta _i \, (i=1,2)\). Substituting the identified values of \(a_i ,b_i ,c_i ,d_i\) and \(\delta _i \,(i=1,2)\) into Eq. (4) and then Eq. (2), we can obtain abundant exact solution of Eq. (1).
3 Application to the (2+1)-dimensional BLMP equation
We study the (2+1)-dimensional Boiti–Leon–Manna–Pempinelli (BLMP) equation as
which was derived by Gilson et al. [19] and recently investigated by Luo [20]. This equation was used to describe the (2+1)-dimensional interaction of the Riemann wave propagated along the \(y\)-axis with a long wave propagated along the \(x\)-axis. Based on the binary Bell polynomials, the bilinear form for the BLMP equation is obtained in [20]. The variable separable solutions and some novel localized excitations for the (2+1)-dimensional BLMP were obtained in [21]. New solutions of (2+1)-dimensional BLMP equation from Wronskian formalism and the Hirota method are obtained in [22, 23].
Under the dependent variable transformation \(u=-2(\ln f)_x\), the Eq. (5) is transformed into the Hirota’s bilinear form
Now we assume the solution of Eq. (6) as
where \(\xi _i =a_i x+b_i y+c_i z+d_i t,\,a_i ,b_i ,c_i ,d_i \) and \(\delta _i ,\, (i=1,2)\) are some constants to be determined later. Now substituting Eq. (7) into Eq. (6) and equating all the coefficients of \(\sin (\xi _2),\,\cos (\xi _2 )\) and \(e^{j\xi _1},\,j=-1,0,1\) to zero, we can obtain the following set of algebraic equation for \(a_i ,b_i ,c_i ,d_i\) and \(\delta _i,\, (i=1,2)\)
Solving the system of Eq. (8) with the help of Maple, we obtain the following cases:
Case 1
where \(a_1 ,b_1 ,b_2 ,\delta _1\) and \(\delta _2\) are some free real constants. Substituting Eq. (9) into \(u=-2(\ln f)_x\) with Eq. (7), we obtain the solution
If \(\delta _2 >0\), then we obtain the exact solution as
for \(\theta =\frac{1}{2}\ln (\delta _2 )\).
If \(\delta _2 <0\), then we obtain the exact solution as
for \(\theta =\frac{1}{2}\ln (-\delta _2 )\), where
Obviously, the Eq. (10) is a periodic solitary-wave solution that is to say it is a periodic wave with period \(2\pi \) with \(X=\xi _2 \), and meanwhile is also solitary wave with \(Y=\xi _1 -\theta \).
Figure 1 shows the periodic solitary-wave solutions for some special values of the solution parameters in cases 1.

Kinky periodic-wave solution for case 1 as \(a_1 =0.5,b_1 =1,b_2 =1,\delta _1 =1,\delta _2 =1\) and \(t=0\)
Case 2
where \(a_1 ,a_2 ,b_1\) and \(\delta _1 \) are some free real constants. Substituting Eq. (11) into \(u=-2(\ln f)_x\) with Eq. (7), we obtain the solution
for
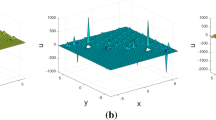
Figure 2 shows the periodic solitary-wave solutions for some special values of the solution parameters in cases 2.

Kinky periodic-wave solution for case 2 as \(a_1 =2,a_2 =0.5,b_1 =2,\delta _1 =1\) and \(t=0\)
Case 3
where \(a_1 ,a_2 ,b_1 ,b_2 ,d_2\) and \(\delta _2\) are some free real constants. Substituting Eq. (13) into \(u=-2(\ln f)_x\) with Eq. (7), we obtain the solution
If \(\delta _2 >0\), then we obtain the exact solution as
for \(\theta =\frac{1}{2}\ln (\delta _2)\).
If \(\delta _2 <0\), then we obtain the exact solution as
for \(\theta =\frac{1}{2}\ln (-\delta _2 )\), where
Obviously, the Eq. (14) is an exact kink solution.
Figure 3 shows the exact kink solutions for some special values of the solution parameters in cases 3.

Exact kink solution for case3 as \(a_1 =1,a_2 =3,b_1 =1,b_2 =2,d_2 =1,\delta _1 =1\) and \(t=0\)
4 Application to the (3+1)-dimensional BLMP equation
In this section, we extend our analysis to construct the exact solutions to the (3+1)-dimensional Boiti–Leon–Manna–Pempinelli (BLMP) equation as
This equation was introduced in [24]. Based on the multiple exp-function method, the single-wave, double-wave and multi-wave solutions for the (3+1)-dimensional BLMP equation are obtained in [24], by means of the Wronskian technique, some exact solutions including rational solutions, soliton solutions, positons and negatons are obtained in [25].
By using the transformation \(u=-2(\ln f)_x\), Eq. (15) can be converted into the following Hirota’s bilinear form
Similarly, we assume the solution of Eq. (16) as
where \(\xi _i =a_i x+b_i y+c_i z+d_i t,\,a_i ,b_i ,c_i ,d_i\) and \(\delta _i,\,(i=1,2)\) are some constants to be determined later. Now substituting Eq. (17) into Eq. (16) and equating all the coefficients of \(\sin (\xi _2),\cos (\xi _2)\) and \(e^{j\xi _1},j=-1,0,1\) to zero, we can obtain the following set of algebraic equation for \(a_i ,b_i ,c_i ,d_i\) and \(\delta _i,\, (i=1,2)\)
Solving the set of algebraic equation with the aid of Maple, yields the following cases:
Case 1
where \(a_1 ,a_2 ,b_2 ,c_1 ,c_2 ,\delta _1\) and \(\delta _2\) are some free real constants. Substituting Eq. (19) into \(u=-2(\ln f)_x\) with Eq. (17), we obtain the solution
If \(\delta _2 >0\), then we obtain the exact solution as
for \(\theta =\frac{1}{2}\ln (\delta _2 )\).
If \(\delta _2 <0\), then we obtain the exact solution as
for \(\theta =\frac{1}{2}\ln (-\delta _2)\), where
Obviously, the Eq. (20) is a periodic solitary-wave solution that is to say it is a periodic wave with period \(2\pi \) with \(X=\xi _2 \), and meanwhile is also solitary wave with \(Y=\xi _1 -\theta \).
Figure 4 shows the periodic solitary-wave solutions for some special values of the solution parameters in cases 1.

Kinky periodic-wave solution for case 1 as \(a_1 =0.5\), \(a_2 =1\), \(b_2 =1\), \(c_1 =1\), \(c_2 =1\), \(\delta _1 =1\), \(\delta _2 =1\), \(t=1\) and \(z=1\)
Case 2
where \(a_2 ,b_1 ,c_1 ,c_2 ,\delta _1\) and \(\delta _2\) are some free real constants. Substituting Eq. (21) into \(u=-2(\ln f)_x\) with Eq. (17), we obtain the solution
for
If \(\delta _2 >0\), then we obtain the exact solution as
for \(\theta =\frac{1}{2}\ln (\delta _2)\).
If \(\delta _2 <0\), then we obtain the exact solution as
for \(\theta =\frac{1}{2}\ln (-\delta _2 )\).
Apparently, the Eq. (22) is a periodic soliton that is to say it is a periodic solution with period \(2\pi \) with \(X=\xi _2 \), and meanwhile is solitary wave with \(Y=\xi _1 -\theta \).
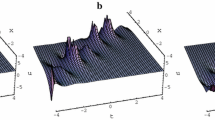
Figure 5 shows the periodic soliton solutions for some special values of the solution parameters in cases 2.

Periodic soliton solution for case 2 as \(a_2 =1.5,b_1 =1,c_1 =1,c_2 =1,\delta _1 =1,\delta _2 =1,t=1\) and \(z=-1\)
Case 3
where \(a_1 ,b_1 ,b_2 ,c_1 ,c_2\) and \(\delta _1\) are some free real constants. Substituting Eq. (23) into \(u=-2(\ln f)_x\) with Eq. (17), we obtain the solution
for \(\xi _1 =a_1 x+b_1 y+c_1 z-a_1^{3}t,\, \xi _2 =b_2 y+c_2 z\).
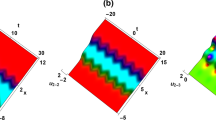
Figure 6 shows the periodic solitary-wave solutions for some special values of the solution parameters in cases 3.

Kinky periodic-wave solution for case 3 as \(a_1 =1,b_1 =1,b_2 =1.6,c_1 =1,c_2 =2,\delta _1 =1,t=0\) and \(z=0\)
5 Conclusion
In conclusion, we solve the (2+1)- and (3+1)-dimensional Boiti–Leon–Manna–Pempinelli (BLMP) equations by using the extended homoclinic approach, new exact solutions including kinky periodic solitary-wave solutions, periodic soliton solutions and kink solutions are obtained in this paper. To our knowledge, these solutions are novel. In addition, the differently mechanical features of these exact solutions are studied. These results show that EHTA combined with the bilinear form is a simple and powerful method to seek exact solutions of nonlinear partial differential equations. whether there are similar results to other equations is still an open problem.
References
Parkes, E.J., Duffy, B.R.: An automated tanh-function method for finding solitary wave solutions to non-linear evolution equations. Comput. Phys. Commun. 98, 288–300 (1996)
Duffy, B.R., Parkes, E.J.: Travelling solitary wave solutions to a seventh-order generalized KdV equation. Phys. Lett. A 214, 271–272 (1996)
Fan, E.G.: A note on the homogenous balance method. Phys. Lett. A 246, 403–406 (1998)
Vakhnenko, V.O., Parkes, E.J., Morrison, A.J.: A Bäcklund transformation and the inverse scattering transform method for the generalised Vakhnenko equation. Chaos Solitons Fractals 17, 683–692 (2003)
Nimmo, J.J.C.: A bilinear Bäcklund transformation for the nonlinear Schrodinger equation. Phys. Lett. A 99, 279–280 (1983)
Matveev, V.B., Salle, M.A.: Darboux Transformations and Solitons. Springer, Berlin (1991)
Wazwaz, A.M.: Multiple-soliton solutions for the KP equation by Hirota’s bilinear method and by the tanh–coth method. Appl. Math. Comput. 190, 633–640 (2007)
Zhang, Y., Song, Y., Cheng, L., Wei, W.W.: Exact solutions and Painlevé analysis of a new (2+1)-dimensional generalized KdV equation. Nonlinear Dyn. 68, 445–458 (2012)
Wang, L., Gao, Y.T., Su, Z.Y., Qi, F.H., Meng, D.X., Lin, G.D.: Solitonic interactions, Darboux transformation and double Wronskian solutions for a variable-coefficient derivative nonlinear Schrödinger equation in the inhomogeneous plasmas. Nonlinear Dyn. 67, 713–722 (2012)
He, J.H., Wu, H.X.: Exp-function method for nonlinear wave equations. Chaos Solitons Fractals 30, 700–708 (2006)
He, J.H., Abdou, M.A.: New periodic solutions for nonlinear evolution equations using exp-function method. Chaos Solitons Fractals 34, 1421–1429 (2007)
Zhao, Z., Dai, Z., Han, S.: The EHTA for nonlinear evolution equations. Appl. Math. Comput. 217, 4306–4310 (2010)
Dai, Z., Liu, J., Li, D.: Applications of HTA and EHTA to YTSF equation. Appl. Math. Comput. 207, 360–364 (2009)
Dai, Z., Huang, J., Jiang, M.: Explicit homoclinic tube solutions and chaos for Zakharov system with periodic boundary. Phys. Lett. A 352, 411–415 (2006)
Xu, Z., Xian, D., Chen, H.: New periodic solitary-wave solutions for the Benjiamin-Ono equation. Appl. Math. Comput. 215, 4439–4442 (2010)
Wang, C., Dai, Z., Mu, G., Lin, S.: New exact periodic solitary-wave solutions for new (2+1)-dimensional KdV equation. Commun. Theor. Phys. 52, 862–863 (2009)
Dai, Z., Liu, J., Zeng, X., Liu, Z.: Periodic kink-wave and kinky periodic-wave solutions for the Jimbo–Miwa equation. Phys. Lett. A 372, 5984–5986 (2008)
Hirota, R.: The Direct Method in Soliton Theory. Cambridge University Press, Cambridge (2004)
Gilson, C.R., Nimmo, J.J.C., Willox, R.: A (2+1)-dimensional generalization of the AKNS shallow water wave equation. Phys. Lett. A 180, 337–345 (1993)
Luo, L.: New exact solutions and Bäcklund transformation for Boiti–Leon–Manna–Pempinelli equation. Phys. Lett. A 375, 1059–1063 (2001)
Ma, S.H., Fang, J.P.: Multi dromion-solitoff and fractal excitations for (2+1)-dimensional Boiti–Leon–Manna–Pempinelli system. Commun. Theor. Phys. 52, 641–645 (2009)
Delisle, L., Mosaddeghi, M.: Classical and SUSY solutions of the Boiti–Leon–Manna–Pempinelli equation. J. Phys. A Math. Theor. 46, 115203 (2013)
Najafi, M., Najafi, M., Arbabi, S.: Wronskian determinant solutions of the (2+1)-dimensional Boiti–Leon–Manna–Pempinelli equation. Int. J. Adv. Math. Sci. 1, 8–11 (2013)
Darvishi, M.T., Najafi, M., Kavitha, L., Venkatesh, M.: Stair and step soliton solutions of the integrable (2+1) and (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equations. Commun. Theor. Phys. 58, 785–794 (2012)
Ma, H., Bai, Y.: Wronskian determinant solutions for the (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation. J. Appl. Math. Phys. 1, 18–24 (2013)
Acknowledgments
The work was supported by the National Natural Science Foundation of China (Grant Nos. 11202161, 11472212, 11302171) and Graduate Starting Seed Fund of Northwestern Polytechnical University.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Tang, Y., Zai, W. New periodic-wave solutions for (2+1)- and (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equations. Nonlinear Dyn 81, 249–255 (2015). https://doi.org/10.1007/s11071-015-1986-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-015-1986-4