
Abstract
Irregular wear is one of the main reasons leading to the failure of mechanical equipment and mechanical parts. The coupling between irregular wear and system dynamic behavior has an important influence on the performance of the mechanism. A modeling and calculation method for planar multi-link mechanism considering multiple wearing clearances is proposed. Taking 2 DOFs nine bars mechanism as research object, iterative wear prediction process based on Archard model is applied to calculate wear characteristics, wear prediction process is combined with multi-body system dynamics to obtain dynamic model considering wearing clearance of revolute pair, and its dynamic response is analyzed. The nonlinear characteristics are analyzed qualitatively and quantitatively by phase diagram, Poincare map, and Largest Lyapunov exponent. At the same time, experimental platform of 2 DOFs nine bars mechanism is built to analyze influence of wearing clearance on response of mechanism. Correctness of theoretical model is verified by experimental results.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The main failure mode of kinematics pair is the wear of surface material. Wear will increase clearance size between the shaft and bearing, change surface roughness of kinematics pair. Finally, service life of pair will reduced, and dynamic response of mechanism will decrease accordingly. Contact force at clearance joint will reach several times, dozens of times, or even hundreds of times of normal value [1,2,3,4,5,6,7,8,9,10]. Therefore, it is of great theoretical value and guiding significance to study dynamic response of mechanisms with wearing clearances.
Many scholars at home and abroad pay attention to wear problem of kinematic pairs, and a series of theoretical studies on dynamics of mechanisms with wearing clearances are carried out. Nowadays, researches on dynamics of mechanism with wearing clearances mainly focused on simple mechanisms, such as crank slider mechanism and crank connecting rod mechanism. The studies on dynamics of planar complex mechanism containing multiple wearing clearances are relatively less. Su et al. [11] proposed a wear prediction method based on kinematics model under the assumption of continuous contact model. Combining the wear prediction process with the idea of finite element method, a theoretical model of wear clearance coupled with kinematic model was established. Flores and Mukras [12, 13] took crank slider mechanism with single wearing clearance joint as an example, analyzed wear depth based on Archard model, and reconstructed surface profile of bearing. In order to improve calculation accuracy and efficiency of Winkler model, Zhu et al. [14] proposed a nonlinear contact pressure distribution model. Based on improved nonlinear contact force model, the influence of wearing clearance of single rotating pair on crank slider mechanism was discussed. Based on LuGre model, Jiang et al. [15] analyzed wear characteristics of a multi-link mechanism with multiple rotating pair clearances, studied wear depth at clearance of rotating pair, reconstructed surface profile of shaft and bearing after wear, and compared dynamic response before and after wear. Bai et al. [16] used a new mixed nonlinear contact force model to establish normal contact force at clearance pair, obtained change law of clearance value before and after wear, and discussed influence of wear cycle on wear characteristics of mechanism. Li et al. [17] analyzed influence of wear of multiple revolute pairs on dynamic response of crank slider mechanism, and discussed influence of different initial clearance values on wear volume, and then obtained the wear depth of clearance joint. The research shows that the greater the initial clearance, the greater the damage to the dynamic performance of the mechanism. Zhao et al. [18] proposed a prediction method based on L-N model and LuGre model, which is suitable for flexible system considering wearing clearance, and analyzed influence of rotation pair wear on rigid-flexible coupling crank slider mechanism. Qu et al. [19] developed ANSYS program based on Archard wear model, simulated wear process of rotating pair with clearance, and studied influence of different gravity environment on wear characteristics of mechanism.
In recent years, influence of wearing clearance on mechanism has been deeply studied by scholars at home and abroad. Among them, some scholars have carried out experimental research on simple mechanism with clearance, and experimental research on multi-link mechanism with clearance is rare. However, experimental study on dynamic response of multi-link mechanism with wearing clearance is even less. Erkaya et al. [20] built test-bed of slider-crank mechanism containing clearances. Influence of clearance value and driving speed on dynamics of mechanism is verified by comparing results of experiment and theoretical model. Zheng et al. [21] verified correctness of simulation model of ultra-precision flexible multi-link press with clearances by comparing ADAMS simulation results with experimental results. Erkaya et al. [22] built test platform of crank rocker mechanism with clearance, studied effects of rotating pair clearance and connecting rod flexibility on response of mechanism. Lai et al. [23] took crank rocker mechanism considering wearing clearance as an example, built test platform for crank rocker mechanism, proposed an iterative prediction method for joint wear evolution of multi-body system dynamics based on Archard model, and studied wear depth of clearance pair in detail. It is found that wear of moving pair with clearance is non-uniform. Liu et al. [24] independently developed a set of shaft sleeve type friction and wear testing machine to explore wear law of large circuit breaker mechanism with clearance, and combined with neural network to establish a wear prediction model. Research showed that model can accurately predict wear process of clearance pair, and provide theoretical support for efficient and accurate prediction of wear. Xu et al. [25] proposed a modeling method for continuously updating wear surface profile of rotating pair in multi-body system. By analyzing relative position between discrete point and geometric center of shaft, contact area between bushing and shaft was estimated, and wear depth of mechanism was obtained. By updating position of discrete contact points, geometry of joint bushing was reconstructed. Taking crank slider mechanism as an example, feasibility of prediction model was verified through test.
To sum up, theoretical analysis and experimental research on effect of wearing clearance on dynamics of mechanism mainly focus on simple mechanism, while theoretical analysis and experimental research on effect of irregular wearing clearances on complex multi-link mechanism are relative rare. It is also rare to quantitatively and qualitatively analyze the nonlinear characteristics of mechanisms considering irregular wearing clearances through phase diagram, Poincare map and Largest Lyapunov exponent. In this paper, an accurate dynamic modeling method considering irregular wearing clearances and the identification method of chaotic phenomenon are proposed, and the correctness of the theoretical model is verified by wear experiments.
This paper is organized as followed: In Sect. 2, wear model of kinematic pair is established. In Sect. 3, dynamic model considering wearing clearance is built. In Sect. 4, wear characteristics, dynamic responses and nonlinear characteristics of multi-link mechanism with wearing clearance joint by phase diagram, Poincare map and Largest Lyapunov exponent are studied. And the theoretical model is verified by experiments. In Sect. 5, some concluding comments are provided.
2 Establishment of dynamic model considering wearing clearance
2.1 Establishment of clearance model of revolute pair
Revolute clearance model is shown in Fig. 1. R1 and R2 are radius of bearing and shaft respectively. P1 is the center of the bearing, P2 is the center of the shaft, Q1 is the collision point at the bearing and Q2 is the collision point at the shaft. O − XY is the fixed coordinate system, o1 − x1y1 is the coordinate system at the bearing, o2 − x2y2 is the coordinate system at the shaft.

Revolute clearance model
Eccentricity vector between the bearing and shaft can be expressed as
where \({\varvec{r}}_{1}^{P}\) and \({\varvec{r}}_{2}^{P}\) the position vector of the center of the bearing and shaft.
Unit vector of the eccentricity vector can be expressed as
Embedding depth can be expressed as
where cR is the clearance value, cR = R1-R2.
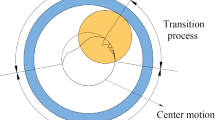
Due to the existence of clearance, according to the geometric relationship between the bearing and shaft, motion state between the shaft and the bearing is divided into free flight state, continuous contact state and collision state, as shown in Fig. 2.

Motion mode of revolute clearance
Criterion for determining collision between components in revolute clearance pair is
When embedding depth \(\delta_{R}\) < 0, there is no collision between shaft and bearing and they are in free flight mode, contact force \(F = 0\). When embedding depth \(\delta_{R}\) > 0, shaft and bearing collide with each other and they are in impact mode, contact force \(F \ne 0\). When embedding depth \(\delta_{R}\) = 0, shaft and bearing are in continuous contact mode, contact force \(F \ne 0\).
The position vector of the collision point of bearing and shaft (\({\varvec{r}}_{1}^{Q}\) and \({\varvec{r}}_{2}^{Q}\)) can be expressed as
When the bearing and shaft collide with each other, velocity vector at collision point of bearing and shaft (\(\dot{\user2{r}}_{1}^{Q}\) and \(\dot{\user2{r}}_{2}^{Q}\)) can be expressed as
where \(\dot{\user2{n}}{\kern 1pt}_{R}\) is the first derivative of unit eccentric vector,\(\dot{\user2{n}}{\kern 1pt}_{R} = \frac{{\dot{\user2{e}}e - \dot{e}{\varvec{e}}}}{{e^{2} }}\).
Normal velocity \(v_{n}\) and tangential velocity \(v_{t}\) of the collision point \({\varvec{Q}}_{1}\) and \({\varvec{Q}}_{2}\) are
where the tangential vector \({\varvec{t}}_{R}\) can be obtained by rotating \({\varvec{n}}_{R}\) counterclockwise \(90^\circ\).
2.1.1 Establishment of normal contact force model
Lankarani-Nikravesh (L-N) model is suitable for general mechanical contact collision problems, especially when recovery coefficient is high and energy dissipation is relatively small during the collision, and it is widely used in the study of dynamics with clearance [26,27,28,29]. The expression of L-N model is
where K is the stiffness coefficient, D is the damping coefficient, \(\dot{\delta }_{R}\) is the velocity of embedded depth.
The stiffness coefficient can be expressed as
where \(\sigma_{1} = \frac{{1 - \upsilon_{1}^{2} }}{{E_{1} }}\), \(\sigma_{2} = \frac{{1 - \upsilon_{2}^{2} }}{{E_{2} }}\), \(\upsilon_{1}\) and \(\upsilon_{2}\) are the Poisson's ratio, \(E_{1}\) and \(E_{2}\) are the elastic modulus.
The damping coefficient can be expressed as
where \(c_{e}\) is the recovery coefficient, \(\dot{\delta }^{\left( - \right)}\) is the initial impact velocity. When \(\delta_{R} \left( {t_{n} } \right)\delta_{R} \left( {t_{n + 1} } \right) \le 0\), meanwhile \(\delta_{R} \left( {t_{n} } \right) < 0{\kern 1pt}\) and \(\delta_{R} \left( {t_{n + 1} } \right) \ge 0\), time of collision is between \(t_{n}\) and \(t_{n + 1}\), the collision velocity at time \(t_{n + 1}\) is \(\dot{\delta }^{\left( - \right)}\).
2.1.2 Establishment of tangential contact force model
Ambrosio proposed a modified Coulomb friction model with dynamic correction coefficient to solve the problem of numerical integration instability caused by friction direction when velocity is near 0 [30,31,32]. The modified Coulomb friction model is
where cf is the friction coefficient, cd is the coefficient of correction, it can be expressed as
where v0 and v1 are the given speed limit.
2.2 Establishment of wearing clearance model of revolute pair
In process of tribology research, Archard model is widely used in wear prediction of multi-body mechanical system, especially in wear prediction of clearance pairs. Structure of the model is simple, which is closest to adhesive wear mechanism. Experimental results also verify the correctness of Archard model [35]. Archard wear model can be written as
where V is the wear volume, Km is the wear coefficient, H is the Brinell hardness of the softer materials, s is the relative sliding distance.
In practical engineering application, wear depth is more convenient to describe the wear characteristics than the wear volume. Therefore, divide Eq. (14) by contact area, the expression can be expressed as [16]
where h is the wear depth, Kd is the linear wear coefficient, Kd = Km/H, p is the normal contact stress.
Geometric relationship of the revolute clearance joint is shown in Fig. 3.

Geometric relationship of revolute clearance
According to cosine theorem, contact angle is
where \(e_{12} = \left| {P_{1} P_{2} } \right|\).
As shown in \(\Delta DP_{2} C\), it can been seen that
In fact, \(\angle DP_{1} C\) is far greater than the actual situation. So, arc length  is roughly equal to \(\left| {DC} \right|\) [23], that is
is roughly equal to \(\left| {DC} \right|\) [23], that is

Actual contact area \(A_{a}\) can be written as
where \(w\) is the axial contact width between the shaft and bearing.
The normal contact stress can be expressed as
Equation (14) is the most commonly used expression of Archard model. Generally, wear characteristics are studied in the form of differential, and the specific expression is as follows [20]
When mechanism runs for m cycles, wear depth can be expressed as [15, 16, 20]
where hm−1 is wear depth of m − 1 cycles ahead, \(\Delta\) hm is wear depth of the m-th cycle.
In order to facilitate the reconstruction of the surface of the shaft and bearing, based on the finite element method, the geometric surfaces of the shaft and bearing are discretized into n parts. The total amount of wear depth of the shaft and bearing can be expressed by the wear depth in each discrete area of the shaft and bearing [9].
where n is discrete area code, hn is the wear depth in a discrete area coded n of the shaft and bearing.
3 Establishment of dynamic model considering wearing clearance
2 DOFs nine bars mechanism studied in this paper has good motion characteristics, such as low and stable running speed of slider at the bottom dead center, good quick return characteristics, good flexibility characteristics, strong bearing capacity, etc. The 2 DOFs nine bars mechanism can be better applied to the main transmission mechanism of hybrid drive multi-link mechanical press. Since crank 1 and crank 4 are driven by motors, the wear at clearances A and B can better reflect the influence of wear clearance on the dynamic behavior of the mechanism. The structure diagram of the 2 DOFs nine bars mechanism considering wearing clearances is shown in Fig. 4.

Structure diagram of 2 DOFs nine bars mechanism considering wearing clearance
When clearances A and B are considered, displacement constraint equation of the system can be expressed as
The velocity and acceleration constraint equations are shown in Eqs. (25) and (26).
where \({{\varvec{\Phi}}}_{q}\) is the Jacobian matrix, \({{\varvec{\Phi}}}_{q} = \frac{\partial \Phi }{{\partial q}}\), \({{\varvec{\Phi}}}_{t} = \frac{\partial \Phi }{{\partial t}}\), \(\dot{\user2{q}}\) is the generalized velocity vector, \(\user2{\ddot{q}}\) is the generalized acceleration vector, \({{\varvec{\Phi}}}_{qt}\) is the partial derivative of the Jacobian matrix with respect to time, \({{\varvec{\Phi}}}_{tt}\) is the partial derivative of \({{\varvec{\Phi}}}_{t}\) with respect to time.
Based on Baumgarte's default stability algorithm, dynamic equation is [33, 34]
where \({\varvec{M}}\) is the mass matrix of system, \({\varvec{\lambda}}\) is the Lagrange multiplier, g is the generalized force, α and β are the correction parameters.
It is worth noting that clearance value after wear is no longer a constant, it depends on the radius of bearing and shaft of the discrete area n, and the clearance value after wear of the discrete area n can be expressed as
The embedded depth of contact area between the shaft and bearing after wear of the discrete area n can be expressed as
In addition, the stiffness coefficient and the damping coefficient of normal contact force model can be calculated according to radius of the worn bearing and shaft. The stiffness coefficient, damping coefficient and normal contact force after wear of the discrete area n are displayed as Eqs. (30), (31) and (32).
The tangential friction force after wear of the discrete area n is
4 Experiment research and dynamic behavior analysis of multi-link mechanism with wearing clearance joint
4.1 Simulation parameters
Frame, rod, clearance shaft, slide block and guide rail are made of aluminum alloy with density of 2800 kg/m3, its elastic modulus is 70 Gpa. Material of inner ring of bearing is 304 steel, so its elastic modulus is 207 Gpa. Simulation parameters are shown in Tables 1 and 2.
4.2 Influence of wearing clearance on dynamic behavior of mechanism
4.2.1 Influence of wearing clearance on dynamic response of mechanism
When clearance joint A and clearance joint B are considered simultaneously, wear depth, surface profile of shaft and bearing, and dynamic responses of mechanism before and after wear are shown from Figs. 5, 6, 7, and 8. The driving speeds of crank 1 and crank 4 are − 120 rpm and 120 rpm, clearance values of joint A and joint B are both 0.5 mm, friction coefficient is 0.15. Mechanism runs for 100 cycles, which is expanded 500 times to approximately equal to 50,000 revolutions.

Wear depth

Surface of bearing

Surface of shaft

Dynamics response of mechanism with wearing clearance
Because surface sizes of shaft and bearing are much larger than wear depth, it is difficult to find surface change when reconstructing surface of shaft and bearing. As a result, sizes of shaft and bearing have been reduced by 100,000 times. According to wear depth maps worn shaft and bearing, wear of rotating clearance pair is uneven and irregular. And under this set of simulation parameters, wear depth of clearance B is greater than that of clearance A.
As shown in Fig. 8, peak value and vibration frequency of dynamic response diagram of the mechanism after wear are larger than those before wear. And the peak time of the dynamic response diagram also changes mainly due to the irregular loss of surface of shaft and bearing after wear. And after wear, center trajectory of clearance joint becomes more chaotic.
4.2.2 Influence of wearing clearance on nonlinear dynamics of mechanism
Based on the structural parameters before and after wear, when the mechanism runs for 100 cycles, the chaotic phenomenon of the mechanism is studied qualitatively and quantitatively through phase diagram, Poincare map and Largest Lyapunov exponent. Taking the X direction as an example, phase diagram and Poincare map of joint A and joint B in the X direction are shown in Figs. 9 and 10 (The black line is the phase orbit trace, and the red point is the Poincare mapping point). The Wolf method is used to calculate Largest Lyapunov exponent [36], Largest Lyapunov exponent of joint A and joint B in the X direction are shown in Figs. 11 and 12.

Phase diagram and Poincare map of joint A in the X direction before and after wear

Phase diagram and Poincare map of joint B in the X direction before and after wear

Largest Lyapunov exponent of joint A in the X direction before and after wear

Largest Lyapunov exponent of joint B in the X direction before and after wear
From the phase diagram of the clearance joint before and after wear, it can be seen that the confusion of the phase trajectory line in the phase diagram of the clearance joint after wear increases, which is mainly due to the irregularity of the shaft and bearing surface after wear. It can be seen from the Poincare map at clearances A and B that the Poincare map points show a certain arc before wear, and the disorder degree of Poincare map points increases and shows irregularity after wear. It can be seen from Figs. 9 and 10 that wear leads to the strengthening of chaos. As shown in Fig. 11, Largest Lyapunov exponents of joint A in the X direction before and after wear are 0.041 and 0.076. As shown in Fig. 12, Largest Lyapunov exponents of joint B in the X direction before and after wear are 0.030 and 0.052. It can be seen that the Largest Lyapunov exponent after wear is higher than that before wear, which further quantitatively determines that the chaotic phenomenon of the mechanism after wear is enhanced.
4.3 Experiment research on effect of wearing clearance on responses of mechanism
Test platform of 2 DOFs nine bars mechanism is shown in Fig. 13. Test device can be used to analyze effects of different material pin, wear cycle, initial clearance value, driving speed and number of clearances on response of mechanism considering wearing clearance.

The 2 DOFs nine bars mechanism test-bed
Ideal rotation pair is in the way of interference fit between pin shaft and inner ring of precision bearing. In order to highlight effect of clearance on mechanism, clearance value processed in this experiment exceeds actual size in the general industrial machine. It is a common means to exaggerate clearance of kinematic pair in dynamic analysis test of mechanism with clearance [22, 37, 38].
Based on basic pore system, clearance is changed by changing the diameter of the pin shaft. Ideally, outside diameter of shaft is 12 mm. Two different clearance values are processed, which are 0.2 mm and 0.5 mm respectively. Outer diameters of the corresponding clearance shafts are \({11}{\text{.6}}\left( {_{{{ - }{0}{\text{.011}}}}^{{0}} } \right)\) mm and \({11}{\text{.0}}\left( {_{{{ - }{0}{\text{.011}}}}^{{0}} } \right)\) mm, as shown in Fig. 14.

Shaft with clearance
It is difficult to measure wear depth of part surface in engineering because wear amount of part surface is small. Weighing equipment adopts JJ224BF electronic balance. The maximum range is 220 g and precision is 0.1 mg.
When mechanism runs for 50,000 revolutions, wear amount can be obtained by comparing weight of aluminum alloy pin before and after wear. Considering clearance between crank 1 and connecting rod 2, clearance value is 0.2 mm. Speeds of crank 1 and crank 4 are set to − 90 rpm and 90 rpm, respectively. Weight of shaft before and after wear is 12.2635 g and 12.2572 g, respectively, as shown in Fig. 15. The mass of the pin decreased by 6.3 mg after wear. It can be seen that the long-time wear of rotating pair with clearance makes material on surface of shaft missing, which makes surface of shaft no longer smooth and destroys stability of mechanism.

Weight of shaft before and after wear
Macro and local enlarged drawing of shaft after wear are shown in Fig. 16. To observe surface of shaft before and after wear more clearly, surface map of shaft before and after wear is obtained by 150 times magnification of three-dimensional microscope (Fig. 17), as shown in Fig. 18. Before wear, surface of shaft has uniform thread like tool marks, which is a typical turning texture. After wear, material on surface of shaft is lost unevenly, turning texture disappears, and even a certain depression occurs on local surface, which seriously damages motion characteristics of mechanism.

Macro view and local enlarged view of worn pin shaft

Ultra-depth three-dimensional microscope

Surface of shaft before and after wear
Based on shaft before and after wear, influence of wear on mechanism response is analyzed, as shown in Fig. 19. Results show that peak value and vibration frequency of acceleration after wear are increased. Frequent contact between the shaft and bearing results in the loss of material on surface of shaft. Take the 51st cycle for numerical analysis, as shown in Fig. 19b, peak acceleration of slider before wear is 109.97 m/s2, and peak acceleration of slider after wear increases to 129.03 m/s2. As shown in Fig. 19c, test and theoretical results of the maximum peak acceleration of the slider are 129.03 m/s2 and 271.8 m/s2, respectively.

Acceleration of slider when mechanism considering wear
Comparing experimental results with theoretical results, it is shown that trend of theoretical and experimental results is the same, but vibration peak and frequency are slightly different, and vibration frequency of experimental results is higher than that of theoretical results. Main reason is that theoretical calculation ignores many practical factors, such as vibration of test platform, test environment and friction effect between slider and guide rail. Measurement accuracy is also the main reason for error. At the same time, wearing clearance studied in this paper is dry friction clearance. Influence of bearing and lubrication is not considered, which leads to a certain error in the peak response. Experimental results are generally consistent with theoretical results, which verifies correctness of theoretical model.
5 Conclusion
In this paper, 2 DOFs nine bars mechanism which can be used in hybrid driven multi-link press is studied by means of numerical analysis and experimental research. Influence of wearing clearance on dynamic response of mechanism is analyzed.
-
(1)
Based on Archard model, dynamic model of 2 DOFs nine bars mechanism with wearing clearance is established.
-
(2)
It is found that wearing clearance increases peak value of dynamic response, accelerates vibration frequency of dynamic response, and makes surface of revolute pair with clearance change irregularly. And because clearance surface of revolute pair is no longer smooth after wear, time of peak value is earlier than before wear.
-
(3)
The nonlinear characteristics are analyzed qualitatively and quantitatively by phase diagram, Poincare map and Largest Lyapunov exponent. Clearance wear leads to the strengthening of chaos and weakening of stability of the mechanism.
-
(4)
Experimental platform of 2 DOFs nine bars mechanism with clearance is built. Through ultra-depth three-dimensional microscope, it is found that wear of kinematic pair is uneven. Wear increases the peak value and vibration frequency of the mechanism’s response.
-
(5)
Due to vibration of test platform, error of component processing and assembly, test environment, friction phenomenon, lubrication phenomenon, component flexibility and rolling bearing and other reasons, test results and theoretical calculation have deviation in numerical value, and trend is generally consistent, which basically verifies correctness of theoretical model.
Data Availability
Data used to support the findings of this study are included in the article.
References
Zheng, E.L., Wang, T.Y., Guo, J., Zhu, Y., et al.: Dynamic modeling and error analysis of planar flexible multilink mechanism with clearance and spindle-bearing structure. Mech. Mach. Theory 131, 234–260 (2019)
Xiang, W.W.K., Yan, S.Z., Wu, J.N., et al.: Dynamic response and sensitivity analysis for mechanical systems with clearance joints and parameter uncertainties using Chebyshev polynomials method. Mech. Syst. Signal Process. 138, 106596 (2020)
Qian, M.B., Qin, Z., Yan, S.Z., et al.: A comprehensive method for the contact detection of a translational clearance joint and dynamic response after its application in a crank-slider mechanism. Mech. Mach. Theory 145, 103717 (2020)
Ambrósio, J., Pombo, J.: A unified formulation for mechanical joints with and without clearances/bushings and/or stops in the framework of multibody systems. Multibody Sys.Dyn. 42(3), 317–345 (2018)
Wu, X.Z., Sun, Y., Wang, Y., et al.: Dynamic analysis of the double crank mechanism with a 3D translational clearance joint employing a variable stiffness contact force model. Nonlinear Dyn. 99(3), 1937–1958 (2020)
Ohno, M., Takeda, Y.: Design of target trajectories for the detection of joint clearances in parallel robot based on the actuation torque measurement. Mech. Mach. Theory 155, 104081 (2021)
Tian, Q., Flores, P., Lankarani, H.M.: A comprehensive survey of the analytical, numerical and experimental methodologies for dynamics of multibody mechanical systems with clearance or imperfect joints. Mech. Mach. Theory 122, 1–57 (2018)
Wen, B.G., Han, Q.K., Qiao, L.C., et al.: Effects of cage clearance on its wear in an angular contact ball bearing. J. Vib. Shock 37(23), 9–14 (2018)
Ke, Q.D., Zhan, W., Song, S.X., et al.: Analyzing method for service & remanufacturing performance of engine crankshaft based on collision energy consumption model with wearing clearance. J. of Mech. Eng. 55(5), 148–155 (2019)
Zhao, B., Dai, X.D., Zhang, Z.N., et al.: Numerical study of the effects on clearance joint wear in flexible multibody mechanical systems. Tribol. Trans. 58(3), 385–396 (2015)
Su, Y., Chen, W., Tong, Y., et al.: Wear prediction of clearance joint by integrating multi-body kinematics with finite-element method[J]. Proc. Inst. Mech. Eng. Part J-J. Eng. Tribol. 224(8), 815–823 (2010)
Flores, P.: Modeling and simulation of wear in revolute clearance joints in multibody systems. Mech. Mach. Theory 44(6), 1211–1222 (2009)
Mukras, S., Kim, N.H., Mauntler, N.A., et al.: Analysis of planar multibody systems with revolute joint wear. Wear 268(5), 643–652 (2010)
Zhu, A.B., He, S.L., Zhao, J.W., et al.: A nonlinear contact pressure distribution model for wear calculation of planar revolute joint with clearance. Nonlinear Dyn. 88(1), 315–328 (2017)
Jiang, S., Chen, X.L., Deng, Y.: Dynamic response analysis of planar multilink mechanism considering wear in clearances. Shock. Vib. 2019, 5389732 (2019)
Bai, Z.F., Zhao, Y., Wang, X.G.: Wear analysis of revolute joints with clearance in multibody systems. Sci. China Phy. Mech. Astron. 56(8), 1581–1590 (2013)
Li, P., Chen, W., Li, D.S., et al.: Wear analysis of two revolute joints with clearance in multibody systems. J. Comput. Nonlinear Dyn. 11(1), 011009 (2016)
Zhao, B., Zhang, Z.N., Dai, X.D.: Modeling and prediction of wear at revolute clearance joints in flexible multibody systems. Proc. Inst. Mech. Eng. Part C-J. Mech. Eng. Sci. 228(2), 317–329 (2014)
Qu, S.G., Duan, Y., Lai, F.Q., et al.: Wear analysis of revolute joints with clearance under different gravity environments. J. Astronaut. 29(4), 442–449 (2018)
Erkaya, S., Uzmay, İ: Experimental investigation of joint clearance effects on the dynamics of a slider-crank mechanism. Multibody Syst. Dyn. 24(1), 81–102 (2010)
Zheng, E.L., Zhu, R., Zhu, S.H., et al.: A study on dynamics of flexible multi-link mechanism including joints with clearance and lubrication for ultra-precision presses. Nonlinear Dyn. 83(1–2), 137–159 (2016)
Erkaya, S., Dogan, S., Ulus, Ş: Effects of joint clearance on the dynamics of a partly compliant mechanism: numerical and experimental studies. Mech. Mach. Theory 88, 125–140 (2015)
Lai, X.M., He, H., Lai, Q.F., et al.: Computational prediction and experimental validation of revolute joint clearance wear in the low-velocity planar mechanism. Mech. Syst. Signal Process. 85, 963–976 (2017)
Liu, C., Liu, H.Z., Zhang, L., et al.: Wear prediction of a circuit breaker transmission mechanism with joint clearances considering the atmosphere environment. J. Vib. Shock 37(18), 67–72 (2018)
Xu, L.X., Han, Y.C., Dong, Q.B., et al.: An approach for modelling a clearance revolute joint with a constantly updating wear profile in a multibody system: simulation and experiment. Multibody Syst. Dyn. 45(4), 457–478 (2019)
Shan, X.L., Cheng, G.: Nonlinear dynamic behaviour of joint effects on a 2(3PUS+S) parallel manipulator. Proc. Inst. Mech. Eng. Part K-J. Multi-Body Dyn. 233(2), 470–484 (2019)
Lankarani, H.M., Nikravesh, P.E.: A contact force model with hysteresis damping for impact analysis of multibody systems. J. Mech. Des. 112(3), 369–376 (1990)
Lankarani, H.M., Nikravesh, P.E.: Continuous contact force models for impact analysis in multibody systems. Nonlinear Dyn. 5(2), 193–207 (1994)
Zhu, J.T., Li, T.J., Wang, Z.W., et al.: Wave motion dynamic analysis of planar frame structures with clearance joints. J. Comput. Nonlinear Dyn. 16(2), 021005 (2021)
Li, Y.Y., Wang, C., Huang, W.: Dynamics analysis of planar rigid-flexible coupling deployable solar array system with multiple revolute clearance joints. Mech. Syst. Signal Process. 117, 188–209 (2019)
Wang, G., Wang, L.: Dynamics investigation of spatial parallel mechanism considering rod flexibility and spherical joint clearance. Mech. Mach. Theory 137, 83–107 (2019)
Sun, D.Y., Zhang, B.Q., Liang, X.F., et al.: Dynamic analysis of a simplified flexible manipulator with interval joint clearances and random material properties. Nonlinear Dyn. 98(2), 1049–1063 (2019)
Flores, P.: A study on constraints violation in dynamic analysis of spatial mechanisms. Comput. Kinemat. 50, 593–601 (2017)
Baumgarte, J.: Stabilization of constraints and integrals of motion in dynamical systems. Comput. Methods Appl. Mech. Eng. 1(1), 1–16 (1972)
Zhao, B., Dai, X.D., Zhang, Z.N., et al.: Prediction of wear in revolute clearance joints in flexible multibody systems. Tribology 33(6), 638–644 (2013)
Wolf, A., Swift, J.B., Swinney, H.L., et al.: Determining Lyapunov exponents from a time series. Phys. D 16(3), 285–317 (1985)
Tan, H., Hu, Y., Li, L.: A continuous analysis method of planar rigid-body mechanical systems with two revolute clearance joints. Multibody Sys.Dyn. 40(4), 347–373 (2017)
Erkaya, S., Dogan, S.: A comparative analysis of joint clearance effects on articulated and partly compliant mechanisms. Nonlinear Dyn. 81(1–2), 323–341 (2015)
Acknowledgements
This research is supported by National Natural Science Foundation of China (Grant no. 51774193).
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
Authors declare that they have no conflict of interest.
Ethical approval
This manuscript has not been published, simultaneously submitted or already accepted for publication elsewhere. All authors have read and approved the manuscript. There is no conflict of interest related to individual authors’ commitments and any project support. All acknowledged persons have read and given permission to be named. Linjing Xiao has nothing to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Jiang, S., Wang, T. & Xiao, L. Experiment research and dynamic behavior analysis of multi-link mechanism with wearing clearance joint. Nonlinear Dyn 109, 1325–1340 (2022). https://doi.org/10.1007/s11071-022-07499-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07499-z