
Abstract
Multiple bright–dark soliton solutions in terms of determinants for the space-shifted nonlocal coupled nonlinear Schrödinger equation are constructed by using the bilinear (Kadomtsev–Petviashvili) KP hierarchy reduction method. It is found that the bright–dark two-soliton only occurs elastic collisions. Upon their amplitudes, the bright two solitons only admit one pattern whose amplitude are equal, and the dark two solitons have three different non-degenerated patterns and two different degenerated patterns. The bright–dark four-soliton is the superposition of the two-soliton pairs and can generate the bound-state solitons. The multiple double-pole bright–dark soliton solutions are derived through a long wave limit of the obtained bright–dark soliton solutions, and their collision dynamics are also investigated.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The coupled nonlinear Schrödinger (CNLS) or CNLS-type equations have attracted considerable attentions because of their wide applications in a wide scope of physical fields, spanning from nonlinear optics to, water waves, atomic condensates, plasma physics, and others [1,2,3,4,5]. In general, these CNLS/CNLS-type equations are non-integrable. However, some variant forms of them with particular parametric choices can become integrable systems [6]. Since their mathematical and physical interests, the exact solutions of these integrable forms of CNLS/CNLS-type equations were well investigated, including solitons, breathers, rogue wave, and coherent structures of them.
Nowadays, investigating nonlocal equations is a hot topic in the field of integrable systems. The first example is the nonlocal NLS equation, which was introduced by Ablowitz and Musslimani from the particular reductions of the Ablowitz–Kaup–Newell–Segur (AKNS) hierarchy [7]. The exact solutions of this nonlocal NLS have been investigated by different methods [7,8,9,10]. Motivated by the seminal works of Ablowitz and Musslimani [7], hierarchies of nonlocal integrable equations and their exact solutions were proposed and studied, including the integrable multidimensional versions of the nonlocal NLS equation [11,12,13,14], and the multi-component forms of the nonlocal NLS equation [11, 15], and the transformations between nonlocal equations and their associated local integrable equations [16], and different nonlocal versions of the NLS/NLS-type Eqs. [17,18,19,20,21]. Very recently, Ablowitz and Mussliman considered a new nonlocal reduction of the AKNS hierarchy called space-shifted nonlocal reduction [22], and proposed the following space-shifted nonlocal NLS equation:
where the space-shifted factor \(x_0\) is an arbitrary real parameter. When \(x=x_0\), the shifted nonlocal NLS Eq. (1) reduce back to the usual nonlocal NLS equation [7]. The space shifted nonlocal NLS Eq. (1) is solvable by the inverse scattering transform and admits an infinitely many conservation laws. The bright two-soliton solutions of the focusing case were studied in the framework of Riemann–Hilbert formulations [22]. The higher-order soliton solutions of Eq. (1) were investigated by using the bilinear method [23, 24].
In this paper, we study the space-shifted nonlocal CNLS equation
where \(\delta \) and \(\gamma \) are real coefficients. By scalings of u and v, the nonlinear coefficients \(\delta \) and \(\gamma \) are normalized to be \(\pm 1\) without loss of generality. When the space-shifted factor \(x_0=0\), Eq. (2) would reduce to the usual nonlocal CNLS equation [11]. The single-pole bright solitons and their collisions in the usual nonlocal CNLS equation have been in discussed in [25, 26]. By taking a long wave limit of these obtained single-pole bright solitons, the double-pole solitons can be derived for the usual nonlocal CNLS equation with focusing ( i.e., \(\delta =-1,\gamma =-1\) in Eq. (2)) and the mixed focusing-defocusing (i.e. \(\delta \gamma =-1\) in Eq. (2)) nonlinearities [26]. Here we have to emphasize that although the smooth bright single-pole soliton solutions exist in usual nonlocal CNLS equation with all types of nonlinearities, but the regular double-pole soliton solutions were not found in the usual nonlocal defocusing CNLS equation (i.e.,\(\delta =\gamma =-1,x_0=0\) in Eq. (2)).
The single-pole soliton solutions and higher-order pole soliton solutions have essential differences. The former one are expressed by superpositions of exponential functions, while the later one are given by combinations of exponential functions with rational functions. The higher-order pole soliton solutions can be derived from single pole-soliton solutions through limit procedures [27]. There are lots of researches were reported for the higher-order pole solitons in various local integrable systems. For the NLS equation, the higher-order pole solitons and their interactions were studied in [28,29,30,31,32,33]. The regularities of these higher-order pole soliton solutions were considered in [34]. Particularly, the long time asymptotic behaviours of these large-order pole solitons were systematically analyzed [35]. For the Hirota equation, the double-pole solitons were first constructed in [36], and their asymptotic analysis were studied recently [37, 38]. The modified Korteweg-de Vries equation and sine-Gordon equation have also been proved to admit the higher-order pole soliton solutions [27, 39,40,41,42,43]. In these scalar integrable systems, the amplitudes of these higher-order pole solitons are equal before and after the collision, namely they only occur elastic collisions. However, the higher-order pole soliton in multi-component integrable systems can happen inelastic collisions, namely, their amplitudes alter after collisions [44,45,46]. Even though so much investigations of higher-order pole solitons have been done for the local systems, but related results on higher-order pole solitons are scarce for the nonlocal integrable systems.
In this work, we will investigate the space-shifted nonlocal CNLS Eq. (2) in two aspects:
-
The multiple bright–dark soliton solutions in terms of determinants for the space-shifted nonlocal CNLS Eq. (2) via the bilinear KP hierarchy reduction.
-
The multiple double-pole bright–dark soliton solutions generated from the bright–dark solitons through the long wave limit procedure.
This paper is organized as follows. In Sect. 2, first we construct multiple bright–dark soliton solutions in terms of determinants for the space-shifted nonlocal CNLS Eq. (2) by using the bilinear Kadomtsev–Petviashvili (KP) hierarchy reduction, then we study the collision dynamics of these multiple bright–dark solitons. In Sect. 3, we derive the multiple double-pole bright–dark soliton solutions for the space-shifted nonlocal CNLS Eq. (2) by taking the long wave limit procedure form the obtained single-pole bright–dark solitons. The conclusions are given in Sect. 4.
2 Multiple bright–dark solitons in the space-shifted nonlocal CNLS equation
In this section, we investigate the multiple bright–dark soliton solutions for the space-shifted nonlocal CNLS Eq. (2) by using the bilinear KP hierarchy reduction method [47,48,49,50,51], in which the u and v components correspond to the bright and dark solitons, respectively.
2.1 Multiple bright–dark soliton solutions in forms of determinants
Through the dependent variable transformations \(u=e^{2i\gamma {t}}\frac{g}{f},v=e^{2i\gamma {t}}\frac{h}{f}\), the space-shifted nonlocal CNLS Eq. (2) is transformed into the bilinear form:
where the function f has to be subject to the following phase-shifted symmetry and complex conjugate condition
and D is the Hirota’s bilinear differential operator [49]. Based on this bilinear form, we present multiple bright–dark soliton solutions to the space-shifted nonlocal CNLS Eq. (2) in the following theorem.
Theorem 1
The bright–dark soliton solutions for the space-shifted nonlocal CNLS Eq. (2) are
where
and the matrix elements are given by
for \(1\le {s,j}\le N\). Here the parameters have to satisfy the following restrictions:
where \(p_s, \xi _s^0,\alpha _j\) are freely complex parameters.
Proof
These bright–dark soliton solutions can be reduced from the following tau functions of multi-component KP hierarchy:
where the elements of matrix M are
with
for \(1\le s,j\le K\), and the superscript T represent the transpose, \(\Phi ,\overline{\Phi },\Psi ,\overline{\Psi }\) are row vectors defined by
which satisfy the following bilinear equations in KP hierarchy
The bilinear Eqs. (13) are (3+1) dimensional, while the bilinear Eqs. (3) of the phase-shifted nonlocal CNLS equation are (1+1) dimensional, thus we have to construct a dimensional reduction for the tau function \(\tau _0^{(0)}\) in Eq. (9). To this end, we take the following parameter constraint,
which can further yield the following relation:
namely,
Then, y and \(x_{-1}\) become two dummy variables, which can be treated as zero. Under this dimension reduction, the last two bilinear equations in Eq. (13) generate the following bilinear equation:
Then this bilinear equation and the first two bilinear equations in Eq. (13) become to the bilinear Eqs. (3) of the space-shifted nonlocal CNLS equation for \(f=\tau _0^{(0)},g=\tau _1^{(0)},g^*(x_0-x,t)=-\tau _{-1}^{(0)},h=\tau _0^{(1)},h^*(x_0-x,t)=\tau _{0}^{(-1)}\) under the variable transformations
We further consider \(2N\times 2N\)(i.e.,\(K=2N\)) matrices for tau functions \(\tau _0^{(n)},\tau _1^{(0)}\) and \(\tau _{-1}^{(0)}\) with the following parameter constraints:
for \(j=1,2,\ldots ,2N\), and \(s=1,2,\ldots , N\), then we can get the following relations:
which implies
Thus, one can derive
namely, the phase-shifted symmetry and complex conjugate condition (4) is realized for \(f=\tau _0^{(0)}\). By further taking \(g=\tau _1^{(0)},g^*(x_0-x,t)=\tau _{-1}^{(0)},h=\tau _0^{(1)},h^*(x_0-x,t)=\tau _{0}^{(-1)}\), Theorem 1 is then proved.
2.2 Dynamics of the bright–dark soliton interactions
By taking \(N=1\) in Theorem 1, the bright–dark two-soliton solutions can be derived, and the functions f, g and h are expressed as:
where \(m_{1,1}^{(n)}=(-\frac{p_1}{p_1^*})^n\frac{e^{\xi _1+\xi _1^*}}{p_1+p_1^*}+\frac{\alpha _1^2}{q_1+q_1^*},m_{1,2}^{(n)}=(\frac{p_1}{p_1^*})^n\frac{e^{\xi _1+\xi _2^*}}{p_1-p_1^*} +\frac{\alpha _1\alpha _1^*}{q_1-q_1^*},m_{2,1}^{(n)}=-m_{1,2}^{(n)*},m_{2,2}^{(n)}=-(-\frac{p_1}{p_1^*})^n\frac{e^{\xi _2+\xi _2^*}}{p_1+p_1^*}-\frac{\alpha _1^{*2}}{q_1+q_1^*}\) and \(\xi _1=p_1x+ip_1^2t+\xi _1^{0},\xi _2=-p_1(x-x_0)+ip_1^2t+\xi _1^{0*}\), and \(q_1=-\frac{p_1^2+\gamma }{\delta {p_1}}\).
These two solitons move along the lines \(\zeta _1=\xi _1+\xi _1^*=x-2p_{1I}t\approx 0\) and \(\zeta _2=\xi _2+\xi _2^*=x+2p_{1I}t\approx 0\), and for convenience they are denoted as soliton 1 and soliton 2, respectively. To study their behaviours, one has to obtain the asymptotic forms of these two solitons. For this purpose, we assume \(p_{1R}>0, p_{1I}>0\) without loss of generality. After some algebraic calculations, the asymptotic expressions of the two solitons are given as follows:
-
(i)
\(\underline{Before collision (t \rightarrow -\infty )}\): Soliton 1 \((\eta _{1} \approx 0, \eta _{2} \approx +\infty )\)
$$\begin{aligned} \begin{aligned} u_1^{(-)}\approx&\frac{e^{i(2\gamma {t}+\xi _{1I})-\lambda _1}}{4}{X}_1{{\,\mathrm{sech}\,}}(\xi _{1R}+\lambda _1), \\ v_1^{(-)}\approx&\frac{e^{2i\gamma {t}}}{2}(1+y_1+(y_1-1)\tanh \frac{\xi _1+\xi _1+\Phi _1}{2}, \\ \end{aligned} \end{aligned}$$(21)Soliton 2 \((\eta _{2} \approx 0, \eta _{1} \approx +\infty )\)
$$\begin{aligned} \begin{aligned} u_2^{(-)}\approx&\frac{e^{i(2\gamma {t}+\xi _{2I})-\lambda _2}}{4}{X}_2{{\,\mathrm{sech}\,}}(\xi _{2R}+\lambda _2), \\ v_2^{(-)}\approx&\frac{e^{2i\gamma {t}}}{2}(1+y_1+(y_1-1)\tanh \frac{\xi _2+\xi _2+\Phi _2}{2}, \\ \end{aligned} \end{aligned}$$(22) -
(ii)
\(\underline{After~collision (t \rightarrow +\infty )}\): Soliton 1 \((\eta _{1} \approx 0, \eta _{2} \approx - \infty )\)
$$\begin{aligned} \begin{aligned} u_1^{(+)}\approx&\frac{e^{i(2\gamma {t}+{\xi }_{1I})-{\widehat{\lambda }}_1}}{4}{{\widehat{X}}}_1{{\,\mathrm{sech}\,}}(\xi _{1R}+{\widehat{\lambda }}_1), \\ v_1^{(+)}\approx&\frac{e^{2i\gamma {t}}}{2}(1+y_1+(y_1-1)\tanh \frac{\xi _1+\xi _1+{\widehat{\Phi }}_1}{2}, \\ \end{aligned} \end{aligned}$$(23)Soliton 2 \((\eta _{2} \approx 0,\eta _{1} \approx - \infty )\)
$$\begin{aligned} \begin{aligned} u_2^{(+)}\approx&\frac{e^{i(2\gamma {t}+{\xi }_{2I})-{\widehat{\lambda }}_2}}{4}{{\widehat{X}}}_2{{\,\mathrm{sech}\,}}(\xi _{2R}+{\widehat{\lambda }}_2), \\ v_2^{(+)}\approx&\frac{e^{2i\gamma {t}}}{2}(1+y_1+(y_1-1)\tanh \frac{\xi _2+\xi _2+{\widehat{\Phi }}_2}{2}, \\ \end{aligned} \end{aligned}$$(24)
where
The above asymptotic analyses indicate that \(|u_j^{(+)}(\xi _{jR})|=|u_j^{(-)}\left( \xi _{jR}+\lambda _j-{\widehat{\lambda }}_j)\right) |\) and \(|v_j^{(+)}(\xi _{jR})|=|v_j^{(-)}\left( \xi _{jR}+\frac{1}{2}(\Phi _j-{\widehat{\Phi }}_j)\right) |\), hence the collisions of these two solitons are elastic in both u and v components, namely the natures of the bright–dark two solitons remain unaltered after collision except for finite shifts, including the amplitudes, speeds and shapes.
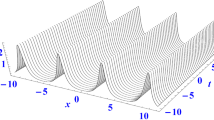
In u component, \(|u_1^{(\pm )}|=|u_2^{(\pm )}|\) means that the amplitudes of the two bright solitons are equal, and the value is \(|u_B|=\sqrt{|\frac{|q_1|^2(p_1+p_1^*)(q_1+q_1^*)}{(\alpha _1-\alpha _1^*)^2}|}\). Figure 1 displays the bright two-soliton solution in u component with same soliton parameters and different signs of nonlinearities \(\delta \) and \(\gamma \) of Eq. (2). It is seen that the space-shifted nonlocal CNLS equation with three different types of nonlinearities admit smooth bright soliton solutions in u component. The different nonlinearities would generate diverse waveforms in the interaction region. In Figs. 1, 2, 3, 4, 5, 6, 7 the top row and bottom row are three-dimensional plots and density plots of corresponding soliton solutions, respectively.
In v component, the amplitudes of the two dark solitons are \(|v_{j}|=\left| \frac{(p_1Y_j-p_1^*|Y_j|)}{p_1(Y_j+|Y_j|)}\right| \) for \(j=1,2\), where \(Y_1=-\frac{4p_1p_1^*(q_1+q_1^*)}{\alpha _1^2(p_1+p_1^*)(p_1-p_1^*)^2},Y_2=-\frac{4p_1p_1^*(q_1+q_1^*)}{\alpha _1^{*2}(p_1+p_1^*)(p_1-p_1^*)^2}\). Thus, the solitons in v can be classified into four different types: two dark solitons for \(|v_j|<1\) (\(j=1,2\)), a mixture of a dark soliton and an antidark soliton for \(|v_j|<1,|v_{3-j}|>1\), two antidark solitons for \(|v_j|>1\), and a degenerated dark two-soliton for \(|v_j|=1,|v_{3-j}|<1\), and a degenerated antidark two-soliton for \(|v_j|=1,|v_{3-j}|>1\). These three types of non-degenerated dark two-soliton and the two types of degenerated dark two-soliton are displayed in Figs. 2 and 3, respectively. It should be noted that expressions of the soliton amplitudes are independent of the phase shift factor \(x_0\), thus the phase shift factor \(x_0\) does not affect the amplitudes of the solitons.

The bright two-soliton solutions (20) in u component of Eq. (2) with parameters \(p_1=\frac{1}{2}+i,\xi _1^{0}=0, x_0=0, \alpha _1=1+(2+\sqrt{5})i\) and different types of nonlinearities in the space-shifted nonlocal CNLS Eq. (2): a \(\delta =1,\gamma =1\); b \(\delta =1,\gamma =-1\); c \(\delta =-1,\gamma =-2\)

The two different types of non-degenerated dark two-soliton solutions (20) in v component of Eq. (2) with parameters \(\delta =1,\gamma =1,p_1=\frac{1}{2}+i,\xi _1^{0}=0,x_0=2\) and different values of parameter \(\alpha _1\): a Two antidark solitons with \(\alpha _1=\frac{1}{10}+10i\); b A mixture of a dark soliton and a antidark soliton with \(\alpha _1=2+i\); c Two dark solitons with \(\alpha _1=3-\frac{1}{2}\);

The two different types of degenerated dark two-soliton solutions (20) in v component of Eq. (2) with parameters \(\delta =-1,\gamma =-1,p_1=\frac{1}{2}+i,\xi _1^{0}=0,x_0=2\) and different values of parameter \(\alpha _1\): a The degenerated dark two-soliton with \(\alpha _1=1+(2-\sqrt{5})i\); b The degenerated antidark two-soltion with \(\alpha _1=1+(2+\sqrt{5})i\)
By taking \(N=2\) in Theorem 1, the bright–dark four-soliton solutions of the space-shifted nonlocal CNLS Eq. (2) can be obtained. Since these four solitons move along the line \(x\pm 2p_{jI}t\approx 0\) for \(j=1,2\), thus they can form two pairs of bound-state two-soliton when \(p_{1I}=\pm p_{2I}\). Here the subscripts R and I represent real and imaginary parts of a given parameter or a function, respectively. Figure 4 displays the bright four-soliton in u component and the dark four-soliton in v component for \(p_{1I}\ne \pm p_{p_2I}\). Figure 5 demonstrates two pairs of bound-state two-soliton of bright type in u and dark type in v with \(p_{1I}=p_{2I}\).
3 Multiple double-pole bright–dark solitons in the space-shifted nonlocal CNLS equation
This section mainly focuses the multiple double-pole bright–dark solitons for the space-shifted nonlocal CNLS Eq. (2).
3.1 Multiple double-pole bright–dark soliton solutions
Following the works in [26, 44], the multiple double-pole bright–dark soliton solutions can be derived from the multiple single-pole soliton solutions in Theorem 1 through the long wave limiting procedure. This is done by choosing the parameters in Eq. (6) as
and then taking the limit \(p_{sI}\rightarrow 0\) for \(s=1,2,\cdots N\). After implementing this limit procedure, we can present the multiple double-pole bright–dark soliton solutions for the space-shifted nonlocal CNLS Eq. (2) by the following theorem.
Theorem 2
The multiple double-pole bright–darksoliton solutions for the space-shifted nonlocal CNLS Eq. (2) are
where
Here the matrix elements are defined as follows:


for \(1\le s\ne j\le N\), and
for \(s=1,2\cdots N\), and
for \(1{\le }s,j\le {N}\). Here the real parameters \({\widetilde{\xi }}_{s},\overline{\alpha }_s\) have to observe the restrictions
3.2 Dynamics of multiple double-pole bright–dark solitons
By taking \(N=1\) in Theorem 2, the double-pole bright–dark two-soliton solutions can be derived, and the functions f, g and h are expressed as
Figure 6 shows this double-pole two-soliton of bright-type in u component and dark-type in v component. As discussed in Sect. 2.2, the single-pole dark two solitons can possess unequal amplitudes (see panel (b) of Fig. 2). However, the amplitudes of the two solitons in the double-pole two-soliton solutions in both u and v components are always equal for all input parameters.
The double-pole bright–dark four-soliton solutions can be derived by taking \(N=2\) in Theorem 2, and their collision dynamics are shown in Fig. 7. Similar to the two pairs of the single-pole bound-state two-soliton displayed in Fig. 5, the double-pole bright–dark four-soliton can also generate temporal periodic waves in their interaction regions.

The bright–dark double pole two-solitons solutions (5) of the space-shifted nonlocal CNLS equation with parameters \(N=2,\delta =1,\gamma =-1,p_{1R}=\frac{1}{2},\overline{\alpha }_1=1,x_0=2,\theta _1=0\)

The double-pole bright–dark four-soliton solutions (5) of the space-shifted nonlocal CNLS equation with parameters \(N=2,\delta =1,\gamma =-1,p_{1R}=\frac{1}{2},p_{2R}=\frac{2}{3},x_0=2,\alpha _1=1,\alpha _2=2,\theta _1=0,\theta _2=0\), which feature two pairs of bound-state double-pole two-soliton
4 Conclusion
In this paper, the multiple single-pole and double-pole bright–dark solitons and their collisions have been studied for the space-shifted nonlocal CNLS Eq. (2), which provides a multi-component analogue of the scalar space-shifted nonlocal NLS Eq. (1) proposed by Ablowitz and Musslimani very recently [21]. The main results of this paper are summarized as follows:
-
(1)
The multiple single-pole soliton solutions were constructed via bilinear KP hierarchy reduction method. To systematically investigated the dynamics of the multiple single pole solitons, we first analyzed asymptotic analysis of the collisions between two single-pole solitons. Based on these analysis, we fund that bright–dark two single-pole solitons only occur elastic collision, namely the identities of bright–dark two single-pole solitons remain unaltered except for a finite phase shift. The bright two solitons in component u possess equal amplitudes (see Fig. 1). The dark two-solitons in component v admits three different non-degenerated patterns (i.e., the dark-dark two-soliton, the dark-antidark two-soliton, the anti-dark-two soliton) (see Fig. 2) and the two different degenerated patterns (i,e.,degenerated dark/antidark two-soliton) (see Fig. 3). The collisions of the bright–dark four-soliton were also exhibited, which illustrate the superpositions of the paired solitons. Particularly, the interaction of these four solitons can lead to two pairs of bound-state two-soliton. These bound-state two-soliton pairs can generate temporal periodic waves in the interaction region (see Fig. 5).
-
(2)
The multiple double-pole bright–dark solitons for the space-shifted nonlocal CNLS Eq. (2) were investigated, which were generated from the multiple single-pole bright–dark solitons through the long wave limit procedure. To reveal the dynamics of the multiple double-pole solitons, the double-pole bright–dark two-soliton and four-soliton solutions were discussed in details (see Figs. 6,7).
Data availability
Data sharing not applicable to this article as no datasets were generated or analysed during the current study
References
Kevrekidis, P.G., Frantzeskakis, D.J.: Solitons in coupled nonlinear Schrödinger models: a survey of recent developments. Rev. Phys. 1, 140 (2016)
Bashkin, E.P., Vagov, A.V.: Instability and stratification of a two-component Bose-Einstein condensate in a trapped ultracold gas. Phys. Rev. B 56, 6207 (1997)
Abowitz, M.J., Horikis, T.K.: Interacting nonlinear wave envelopes and rogue wave formation in deep water. Phys. Fluids 27, 012107 (2015)
Bailung, H., Sharma, S.K., Nakamura, Y.: Observation of peregrine solitons in a multicomponent plasma with negative ions. Phys. Rev. Lett. 107, 255005 (2011)
Akhmediev, N., Ankiewicz, A.: Solitons: Nonlinear Pulses and Beams. Chapman and Hall, London (1997)
Makhan’kov, V.G., Pashaev, O.K.: Nonlinear Schrödinger equation with noncompact isogroup. Theor. Math. Phys. 53, 979 (1982)
Ablowitz, M.J., Musslimani, Z.H.: Integrable nonlocal nonlinear Schrödinger equation. Phys. Rev. Lett. 110, 064105 (2013)
Chen, K., Deng, X., Lou, S.Y., Zhang, D.J.: Solutions of nonlocal equations reduced from the AKNS hierarchy. Stud. Appl. Math. 141, 113 (2018)
Feng, B.F., Luo, X.D., Ablowitz, A.J., Musslimani, Z.H.: General soliton solution to a nonlocal nonlinear Schrödinger equation with zero and nonzero boundary conditions. Nonlinearity 31, 5385 (2018)
Gürses, M., Pekcan, A.: Nonlocal nonlinear Schrödinger equations and their soliton solutions. J. Math. Phys. 59, 051501 (2018)
Ablowitz, M.J., Musslimani, Z.H.: Integrable nonlocal nonlinear equations. Stud. Appl. Math. 139, 7 (2017)
Fokas, A.S.: Integrable multidimensional versions of the nonlocal nonlinear Schrödinger equation. Nonlinearity 29, 319 (2016)
Rao, J., Zhang, Y., Fokas, A.S., He, J.: Rogue waves of the nonlocal Davey-Stewartson I equation. Nonlinearity 31, 4090–4107 (2018)
Rao, J., He, J., Mihalache, D., Cheng, Y.: \(PT\)-symmetric nonlocal Davey-Stewartson I equation: general lump-soliton solutions on a background of periodic line waves. Appl. Math. Lett. 106, 106246 (2020)
Yan, Z.: Integrable \(PT\)-symmetric local and nonlocal vector nonlinear Schrödinger equations: a unified two-parameter model. Appl. Math. Lett. 47, 61 (2015)
Yang, B., Yang, J.: Transformations between nonlocal and local integrable equations. Stud. Appl. Math. 140, 178 (2018)
Yang, B., Chen, Y.: Several reverse-time integrable nonlocal nonlinear equations: Rogue-wave solutions. Chaos 28, 053104 (2018)
Shi, Y., Zhang, Y.S., Xu, S.W.: Families of nonsingular soliton solutions of a nonlocal Schrödinger-Boussinesq equation. Nonlinear Dyn. 94, 2327–2334 (2018)
Shi, Y., Shen, S., Zhao, S.: Solutions and connections of nonlocal derivative nonlinear Schrödinger equations. Nonlinear Dyn. 95, 1257–1267 (2019)
Liu, Y., Li, B.: Dynamics of solitons and breathers on a periodic waves background in the nonlocal Mel’nikov equation. Nonlinear Dyn. 100, 3717–3731 (2020)
Chen, J., Yan, Q., Zhang, H.: Multiple bright soliton solutions of a reverse-space nonlocal nonlinear Schrödinger equation. Appl. Math. Lett. 106, 106375 (2020)
Ablowitz, M.J., Musslimani, Z.H.: Integrable space-time shifted nonlocal nonlinear equations. Phys. Lett. A 409, 127516 (2021)
Gürses, M., Pekcan, A.: Soliton solutions of the shifted nonlocal NLS and MKdV equations, arXiv:210614252v2 [nlin.SI]
Liu, S.M., Wang, J., Zhang, D.J.: Solutions to integrable space-time shifted nonlocal equations, arXiv:210704183v1 [nlin.SI]
Stalin, S., Senthilvelan, M., Lakshmanan, M.: Energysharing collisions and the dynamics of degenerate solitons in the nonlocal Manakov system. Nonlinear Dyn. 95, 343 (2019)
Rao, J., He, J., Kanna, T., Mihalache, D.: Nonlocal M-component nonlinear Schrödinger equations: Bright solitons, energy-sharing collisions, and positons. Phys. Rev. E 102, 032201 (2021)
Zhang, Z., Li, B., Guo, Q.: Construction of higher-order smooth positons and breather positons via Hirota’s bilinear method. Nonlinear Dyn. 105, 2611–2618 (2021)
Gagon, L., Stiévenart, N.: \(N\)-soliton interaction in optical fibers: the multiple-pole case. Opt. Lett. 19, 619 (1994)
Aktosun, T., Demontis, F., van der Mee, C.: Exact solutions to the focusing nonlinear Schrödinger equation. Inverse Probl. 23, 2171–2195 (2007)
Martines, T.: Generalized inverse scattering transform for the nonlinear Schrödinger equation for bound states with higher multiplicities. Electron. J. Differ. Equ. 179, 1–15 (2017)
Tanaka, S.: Non-linear Schrödinger equation and modified Korteweg-de Vries equation; construction of solutions in terms of scattering data. Publ. RIMS, Kyoto Univ. 10, 329–357 (1975)
Olmedilla, E.: Multiple pole solutions of the non-linear Schrödinger equation. Physica D 25, 330–346 (1987)
Schiebold, C.: Asymptotics for the multiple pole solutions of the nonlinear Schrödinger equation. Nonlinearity 30, 2930–2981 (2017)
Zhang, Y., Tao, X., Yao, T., He, J.: The regularity of the multiple higher-order poles solitons of the NLS equation. Stud. Appl. Math. 145, 812–827 (2018)
Bilman, D., Buckingham, R.: Large-Order Asymptotics for Multiple-pole solitons of the focusing nonlinear Schrödinger Equation. J. Noninear Sci. 29, 2185–2229 (2019)
Lai, D.W.C., Chow, K.W., Nakkeeran, K.: Multiple-pole soliton interactions in optical fibres with higher-order effects. J. Mod. Optic 51, 455–460 (2004)
Zhang, X., Ling, L.: Asymptotic analysis of high-order solitons for the Hirota equation. Phyica D 426, 132982 (2021)
Li, M., Zhang, X., Xu, T., Li, L.: Asymptotic analysis and soliton interactions of the multi-pole solutions in the Hirota equation. J. Phys. Soc. Jpn. 89, 054004 (2020)
Wadati, M., Ohkuma, K.: Multiple-pole solutions of the modified Korteweg-de Vries equation. J. Phys. Soc. Jpn. 51, 2029–2035 (1982)
Zhang, D.J., Zhao, S.L., Sun, Y.Y., Zhou, J.: Solutions to the modified Korteweg-de Vries equation. Rev. Math. Phys. 26, 1430006 (2014)
Aktosun, T., Demontis, F., van der Mee, C.: Exact solutions to the sine-Gordon equation. J. Math. Phys. 51, 123521 (2010)
Pöppe, C.: Construction of solutions of the sine-Gordon equation by means of Fredholm determinants. Physica D 9, 103–139 (1983)
Tsuru, H., Wadati, M.: The multiple pole solutions of the sine-Gordon equation. J. Phys. Soc. Jpn. 53, 2908–2921 (1984)
Rao, J., Kanna, T., Sakkaravarthi, K., He, J.: Multiple double-pole bright-bright and bright-dark solitons and energy-exchanging collision in the M-component nonlinear Schrödinger equations. Phys. Rev. E 103, 062214 (2021)
Shchesnovich, V., Yang, J.: Higher-order solitons in the \(N\)-wave system. Stud. Appl. Math. 110, 297–332 (2003)
Kuang, Y., Zhu, J.: The higher-order soliton solutions for the coupled Sasa-Satsuma system via the \(\partial \)-dressing method. Appl. Math. Lett. 66, 47–53 (2017)
Jimbo, M., Miwa, T.: Solitons and infinite dimensional Lie algebras. Publ. RIMS Kyoto Univ. 19, 943–1001 (1983)
Date, E., Kashiwara, M., Jimbo, M., Miwa, T.: Transformation groups for soliton equations, in Nonlinear Integrable Systems–Classical Theory and Quantum Theory. eds. M. Jimbo and T. Miwa ( World Scientific, Singapore, 1983)
Hirota, R.: The direct method in soliton theory. Cambridge University Press, Cambridge (2004)
Ohta, Y., Wang, D.S., Yang, J.: General N-dark-dark solitons in the coupled nonlinear Schrödinger Equations. Stud. Appl. Math. 127, 345–371 (2011)
Ohta, Y., Yang, J.: General high-order rogue waves and their dynamics in the nonlinear Schrödinger equation. Proc. R. Soc. A 468, 1716 (2012)
Acknowledgements
This work is supported by the NSCF of China under Grant Nos. 12071304
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
We declare we have no conflict of interests
Ethical approval
Authors declare that they comply with ethical standards
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ren, P., Rao, J. Bright–dark solitons in the space-shifted nonlocal coupled nonlinear Schrödinger equation. Nonlinear Dyn 108, 2461–2470 (2022). https://doi.org/10.1007/s11071-022-07269-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07269-x