
Abstract
It is a challenging issue to achieve the normal operation of control systems despite mismatched nonlinear uncertainties and unknown time-varying control coefficients. Based on the signs of control coefficients rather than nominal values or approximative mathematical expressions, the paper proposes a new active disturbance rejection control to tackle mismatched nonlinear uncertainties and unknown values of time-varying control coefficients. The design procedure can be concluded by three steps: determining the equivalent integrators chain form, constructing the extended state observer to estimate total disturbance and designing a dynamical system to generate the input approaching the desired input signal. Then, under a mild assumption for mismatched nonlinear uncertainties and unknown time-varying control coefficients, the paper rigorously analyzes the bounds of tracking error, estimating error and the error between the actual and desired inputs. Based on the presented error bounds, the tracking error with respect to the desired trajectory can be close to zero during the whole time period by suitably enlarging the observer parameter. The theoretical results reveal the strong robustness of the proposed method to mismatched nonlinear uncertainties and unknown time-varying control coefficients. Finally, by constructing the relationship between the observer parameter and the parameter in dynamical input design, the adjustable controller parameters remain observer parameter and feedback gain, which is friendly to practitioners.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Uncertainties, including unmodeled nonlinear dynamics, external disturbances and parametric perturbations, are ubiquitous in practice. In control science and technology, it is a central issue to ensure the normal operation of control systems despite various uncertainties [1].
Motivated by this important objective, numerous control strategies have been substantially developed, such as proportional-integral-derivative (PID) control [2], adaptive control [3], fuzzy control [4, 5], neural network-based control [6,7,8] and disturbance rejection methods [9,10,11,12], just to name a few. In [2], the capability of PID control to handle nonlinear uncertainties was proved. The reference [3] comprehensively introduced the design and application of adaptive control, which can tackle a large scope of parametric uncertainties. The design of fuzzy control for nonlinear uncertainties was reviewed in [4]. More importantly, for nonlinear systems with unknown control coefficients, a novel fuzzy controller was developed in [5]. Besides, for nonlinear lower-triangular systems, neural network-based designs were proposed in [6, 7]. In addition, various disturbance rejection designs have been proposed in the past decades [9,10,11,12], which can online estimate and compensate for uncertainties.
In recent years, disturbance rejection methods have drawn lots of attention from researches due to the simplicity in practical implementation and the superior performance to handle nonlinear uncertainties. Active disturbance rejection control (ADRC) is one of the most popular designs among various disturbance rejection methods, which has been successfully applied to flight systems [13,14,15], motion control systems [16, 17] and process control systems [18,19,20], just to name a few. In the framework of ADRC, the extended state observer (ESO) is novelly constructed to estimate the total effect of various uncertainties, named as “total disturbance” [21], and then the control input is composed of the compensation for total disturbance and the feedback of integrators chain states.
In the last two decades, the theoretical foundation of ADRC has been substantially established. For the ESO which is the vital component in ADRC, the literature [22] investigated the convergence of ESO and further showed the bound of estimating error. The closed-loop stability of ADRC was firstly presented in [23], where the considered uncertainties and their derivatives with respect to the time were assumed to be bounded. For the linear time-invariant uncertain systems, the literature [24] theoretically illustrated the satisfied tracking performance of ADRC despite a large scope of parametric variations. In [25], by assuming the existence of the Lyapunov functions related with uncertainties, the capability of ADRC to deal with nonlinear uncertainties was proved. By assuming that the uncertainties and their partial derivatives are bounded if the states are in a bounded set, the references [26, 27] rigorously studied the convergence and the transient performance of ADRC-based closed-loop system. It is remarkable that the conditions in [26, 27] can depict a wide class of nonlinear uncertainties in practice. By utilizing the concept of total disturbance, the literatures [28, 29] illuminated the capability of ADRC to handle the mismatched nonlinearities in both dynamical systems and measurement models. Besides, several successful modifications of ADRC have been made for nonlinear uncertain systems with other complicated practical factors, such as time delay [30, 31] and stochastic uncertainties [32, 33].
Up to now, the theoretical results have demonstrated the effectiveness of ADRC to tackle the time-varying disturbances and the nonlinear internal uncertainties dependent on system states. In the conventional ADRC design, it is remarkable that the information of the control coefficient is required to design the ESO and the compensation term for total disturbance [12, 34, 35]. In practical systems, the true values of control coefficients are usually unknown [24], which promotes the development of ADRC based on the nominal values or the approximative mathematical expressions of control coefficients. For the ADRC based on the nominal information of control coefficients, the literatures [24, 26, 28] quantitatively analyzed the stability region of uncertain control coefficients. Unfortunately, compared with the capability to handle the nonlinear uncertainties dependent on system states, the capability of the conventional ADRC to deal with the uncertainties of control coefficients is limited [36]. Besides, in some practical systems, it is difficult to obtain the nominal values or the approximative mathematical expressions of control coefficients [18, 19, 30]. Hence, it is significant to design a new ADRC which is featured with the strong robustness to uncertainties and does not rely on the nominal values or the approximative mathematical expressions of control coefficients.
The paper studies the control problem for a class of lower-triangular nonlinear uncertain systems. Based on the signs of control coefficients rather than the nominal values or the approximative mathematical expressions, a new ADRC design is proposed to handle the mismatched nonlinear uncertainties and the unknown values of control coefficients. The design procedure of the new ADRC is separated into three parts: (1) determining the transformation from the original states to the states of an equivalent integrators chain system, (2) designing the ESO to estimate the total disturbance and the states of the integrators chain system, and (3) forcing the actual input to track the desired input signal by designing a dynamical system. By rigorously analyzing the closed-loop properties, the bounds of tracking error, estimating error and the error between the actual and desired inputs are explicitly shown as the functions of control parameters. Based on the detailed expressions of error bounds, it is demonstrated that the satisfied closed-loop performance can be obtained despite a wide class of uncertainties by suitably enlarging the ESO’s parameter. Moreover, by meticulously studying the relationship between the original states and the integrators chain states, the paper removes the bounded hypothesis for integrators chain states, which is required in [21]. The main contributions of the paper are as follows.
-
(1)
In the conventional ADRC designs [12, 26, 28, 34], the nominal values or the approximative mathematical expressions of control coefficients are required. In the paper, a new ADRC based on the signs of control coefficients is proposed, which can deal with a large scope of uncertain control coefficients.
-
(2)
Compared with the mismatched bounded disturbances [5] and Lipschitz continuous uncertainties [7], the paper considers the mismatched uncertainties with nonlinear growth with respect to system states. Moreover, despite a wide class of nonlinear uncertainties, the satisfied tracking performance in the whole time period is proved.
-
(3)
The tuning principle of the control parameters is provided. Especially, the relationship between the parameter of input dynamical system and the observer parameter is explicitly shown.
The rest of the paper has the following organization. In Sect. 2, the problem formulation is given. In Sect. 3, the new ADRC based on the signs of control coefficients is proposed. In Sect. 4, the theoretical analysis of the closed-loop system is presented. The simulation studies are shown in Sect. 5. The conclusion is presented in Sect. 6.
1.1 Notations
The following notations are used throughout the paper. \(y^{(k)}(t)\) represents the k-th order derivative of y with respect to the variable t for \(k \ge 1\) and \(y^{(0)}(t) \triangleq y(t)\). The notations \(|\cdot |\) and \(\Vert \cdot \Vert \) are the absolute value of a scalar and the 2-norm of a vector or a matrix, respectively. The notation \(\text {diag}(a_1,a_2,\cdots ,a_m)\) represents a diagonal matrix with the dimension \(m\times m\), whose i-th diagonal element is \(a_i\). For a given real symmetric matrix M, the maximal eigenvalue of M is denoted as \(\lambda _\mathrm{max}(M)\) and the minimal eigenvalue of M is denoted as \(\lambda _\mathrm{min}(M)\). The following useful matrices are introduced.
The function \(\hbox {sgn}(\cdot )\) represents the sign function, which satisfies
2 Problem formulation
Consider the following class of lower-triangular nonlinear uncertain systems with unknown control coefficients.
where \(x_i(t)\in R\) \((1\le i \le n)\) are the system states, \(x(t)\triangleq [x_1(t)~\cdots ~x_n(t)]^T\in R^n\) is the system state vector, \(z(t)\in R^m\) is the state vector of zero dynamics, \(y(t)\in R\) is the measured output to be controlled, \(u(t)\in R\) is the control input, \(g(\cdot )\) represents the dynamics of z(t), \(\phi _i(\cdot )~(1\le i\le n)\) represent the uncertainties in various channels which might be mismatched, and \(\theta _i(t)~(1\le i\le n)\) are the unknown time-varying control coefficients. As shown in [37], the signs of the control coefficients \(\theta _i(t)\), i.e., \(\hbox {sgn}(\theta _i(t))~(1\le i \le n)\), represent the control directions of the system (3). The paper considers the situation that the control directions \(\hbox {sgn}(\theta _i(t))~(1\le i \le n)\) are known. However, both the approximative mathematical expressions and the nominal values of the control coefficients \(\theta _i(t)\) are unknown.
Based on the control directions \(\hbox {sgn}(\theta _i(t))\) rather than the nominal values or the approximative mathematical expressions of control coefficients, the control objective of the system (3) is to design the control input u(t) such that the output y(t) can track the reference signal r(t) despite the mismatched nonlinear uncertainties \(\phi _i(\cdot )~(1\le i \le n)\).
Remark 1
The system (3) can model plenty of practical processes, such as flight systems [15], motion control systems [16] and process control systems [20]. More importantly, under the strong nonlinearity of the unknown functions \(\phi _i(\cdot )\), it is challenging to achieve the output regulation task only based on the control directions \(\hbox {sgn}(\theta _i(t))\).
Before the detailed control design, the following assumptions for the reference signal r(t), the mismatched nonlinear uncertainties \(\phi _i(\cdot )~(1\le i\le n)\) and the dynamics of z(t) are introduced.
Assumption 1
There exists a positive constant \(M_r\) such that \(\sup _{t\ge t_0} |r^{(i)}(t)|\le M_r\) for \(0\le i\le n+1\).
Remark 2
Assumption 1 implies that the reference signal and its derivatives are bounded, which is rational in practice [34].
Assumption 2
The functions \(\phi _i(\cdot )\) and \(\theta _i(\cdot )\) are \((n+1-i)\)-th order differentiable with respect to their variables for \(1\le i \le n\). There exist positive constants \({\bar{M}}_{\theta ,i}\) and \({\underline{M}}_{\theta ,i}\) and continuous functions \(\psi _{\phi ,i}(x_1,\cdots ,x_i)\) such that
for \(\Sigma _{k=1}^{i+1} j_k \le n+i-1\), \(1\le i \le n\) and \(j_{p}\ge 0~(1\le p \le i+1)\).
Remark 3
Assumption 2 describes a large scope of internal nonlinear uncertainties and external disturbances in practice, which is more general than the assumptions in [5, 7]. From (4), the control coefficients and their derivatives are assumed to be bounded. Since the practical systems are controllable, the control coefficients \(\theta _i(t)\) are assumed to be nonzero for \(t\ge t_0\), as shown in (4) [38]. Hence, (4) further implies that the control directions \(\hbox {sgn}(\theta _i(t))\) will not change. We remark that the assumption for \(\theta _i(t)\) is a common one [5, 37]. As for the nonlinear uncertainties \(\phi _i(\cdot )\), (5) implies that the uncertainties and their partial derivatives are bounded by some continuous functions \(\psi _{\phi ,i}(\cdot )\) dependent on system states. Due to (5), the uncertainties \(\phi _i(\cdot )\) and their partial derivatives are assumed to be bounded if the system states are bounded, which allows the uncertainties to grow nonlinearly with respect to system states.
Assumption 3
There exists a radially unbounded positive-definite function \(V_z(z)\) such that
where \(r_z(\cdot )\) is a nonnegative continuous increasing function.
Remark 4
By regarding x(t) as the input of the z-subsystem, Assumption 3 implies that the z-subsystem is uniformly input-state-stable [26]. For the system (3) being a linear time-invariant system, Assumption 3 is equivalent to that the system (3) is a minimum phase plant.
Remark 5
As shown in the conventional ADRC design [12, 26, 28, 34], the nominal values or the approximative mathematical expressions of control coefficients are required, which play important roles in the design of ESO and compensation term. However, it is sometimes hard to acquire the nominal values or the approximative mathematical expressions in practical systems [18, 19], which leads to the ruleless tuning of nominal control coefficients. In the other hand, due to physical mechanism, the control directions, i.e., the signs of the control coefficients, can be easily determined. Hence, the paper aims to develop a new ADRC based on the control directions rather than the nominal values or the approximative mathematical expressions of control coefficients.
In the next section, an ADRC design based on the control directions \(\hbox {sgn}(\theta _i(t))\) is proposed to achieve the output regulation task despite multiple uncertainties.
3 ADRC based on control directions
In this section, a new ADRC based on control directions is proposed. The corresponding control diagram is shown in Fig. 1. The rest of this section consists of the following three parts.
-
1.
The equivalent integrators chain form for the system (3) is investigated, which shows the essential relationship between the input and the output. Moreover, the output regulation task is transmitted to the state tracking task.
-
2.
Based on the equivalent integrators chain system, an ESO is presented to estimate the derivatives of output and the unknown term named as “total disturbance.”
-
3.
Via the estimations from ESO, the control input is generated by a dynamical system, which forces the input to track the desired input signal.

Control diagram for the proposed ADRC
3.1 Analysis for the equivalent integrators chain form
In this subsection, the equivalent integrators chain form for the system (3) is investigated.
Denote the new state vector \({\tilde{x}}(t)= [{\tilde{x}}_1(t)~\cdots ~{\tilde{x}}_n(t)]^T \in R^n\) as follows.
where \(\theta _0(t) = 1\) for \(t\ge t_0\).
The following proposition illustrates the relationship between the state vectors x and \({\tilde{x}}\).
Proposition 1
Consider the transformation (7) under Assumption 2. Then, there exist two continuous mappings satisfying
and
where \(\psi _{\gamma }(\cdot )\) and \(\psi _{\varphi }(\cdot )\) are nonnegative continuous increasing functions dependent on \({\bar{M}}_{\theta ,i}\), \({\underline{M}}_{\theta ,i}\) and \(\psi _{\phi ,i}\) for \(1\le i \le n\).
The proof of Proposition 1 is given in Appendix.
Remark 6
In the existing studies [21, 28], the bounds of the mappings \(\gamma _i(\cdot )\) and \(\varphi _i(\cdot )\) are provided in additional assumptions. In this paper, by rigorously analyzing the detailed expressions of the mappings \(\gamma _i(\cdot )\) and \(\varphi _i(\cdot )\), we prove that \(\gamma _i(\cdot )\) and \(\varphi _i(\cdot )\) and their partial derivatives satisfy (9)–(10). Hence, the assumptions for the bounds of \(\gamma _i(\cdot )\) and \(\varphi _i(\cdot )\) are removed in the paper.
Based on the transformation (7) and Proposition 1, the system (3) can be rewritten as the following integrators chain system.
with the initial condition \({\tilde{x}}(t_0) = [\gamma _1(x(t_0),t_0)~\cdots \gamma _n(x(t_0),t_0)]^T\). The control coefficient b(t) and the uncertainty \(f({\tilde{x}}(t),t)\) have the following form.
where \({\tilde{\phi }}_{i}({\tilde{x}},t) = \phi _i(\varphi _1({\tilde{x}},t),\cdots ,\varphi _i({\tilde{x}},t),t)\) for \(1 \le i \le n\).
If the nominal value of the control coefficient b(t), denoted as \({\bar{b}}(t)\), can be obtained, the conventional ADRC can be applied to the system (11) by regarding \(f({\tilde{x}},t)+(b(t)-{\bar{b}}(t))u(t)\) as the total disturbance [28, 34]. However, only the sign of the control coefficient b(t) is known in the paper, rather than the nominal value or the approximative mathematical expression.
Next, based on the integrators chain form (11) and the sign of control coefficient b(t), an ADRC design will be proposed.
3.2 ESO design
Since the nominal value of the control coefficient b(t) is unknown, the total disturbance of the system (11) is denoted as
Then, the following ESO is presented to estimate \({\tilde{x}}\) and \(f_t\).
where \(\hat{{\tilde{x}}}(t) = [\hat{{\tilde{x}}}_1(t)~\cdots ~\hat{{\tilde{x}}}_{n}(t)]^T\in R^{n}\) is the estimation for the state vector \({\tilde{x}}(t)\) and \({\hat{f}}_t(t) \in R\) is the estimation for the total disturbance \(f_t({\tilde{x}},u,t)\). In addition, the constant vector \(L_e\in R^{(n+1)\times 1}\) is the tunable parameter vector of ESO such that the matrix \(A_L \triangleq A_e-L_eC_e^T\) is Hurwitz. Owing to [39], the following concise tuning method of \(L_e\) is presented.
which ensures that all the eigenvalues of \(A_L\) are set at \(- \omega _o\).
Next, a dynamical design of ADRC input based on the estimations from ESO will be presented.
3.3 Dynamical input design
Firstly, the desired control input is introduced. For the system (11), the desired closed-loop system satisfies the following form.
where \({\tilde{x}}^*(t)\triangleq [{\tilde{x}}^*_1(t)~\cdots ~{\tilde{x}}^*_n(t)]\in R^n\) is the state vector of the desired system, \(z^*(t)\in R^m\) is the state vector of the desired zero dynamics, \(y^*(t)\in R\) is the desired output, \({\bar{r}}(t) \triangleq [r(t)~\cdots ~r^{(n-1)}(t)]^T\in R^n\) and the constant vector \(K\in R^{n\times 1}\) is feedback gain vector satisfying that the matrix \(A_K\triangleq A-BK^T\) is Hurwitz.
Remark 7
For the desired system (17), the output \(y^*(t)\) can exponentially converge to the reference signal r(t) with the desired convergence rate by tuning the feedback gain vector K. Moreover, the system states \(({\tilde{x}}^*(t),z^*(t))\) are bounded for \(t\ge t_0\).
By comparing the integrators chain system (11) with the desired system (17), the desired control input can be obtained as follows.
Inspired by the approximative dynamic inversion method in [40], we design the following dynamical system to generate the actual input u(t) which can approach the desired input signal \(u^*(t)\).
where \(\kappa (\omega _o) >0\) is a function to be designed.
The parameter \(\kappa (\omega _o)\) should be carefully selected to ensure that the dynamics (19) is “slower” than the dynamics of the ESO (15) [41]. However, the explicit tuning law of \(\kappa (\omega _o)\) has not been provided in the existing studies. To make the proposed method more friendly to practitioners, the tuning law of \(\kappa (\omega _o)\) is depicted in the following assumption.
Assumption 4
The increasing function \(\kappa (\omega _o)>0\) for \(\omega _o>0\) and
Assumption 4 describes the growth rate of the increasing function \(\kappa (\omega _o)\) which grows faster than the log function \(f_1(\omega _o) = (\ln \omega _o)^2\) and slower than the linear function \(f_2(\omega _o)=\omega _o\). It is remarkable that the function \(\kappa (\omega _o) = \omega _o^k\) with \(0<k<1\) can satisfy Assumption 4.
Remark 8
This remark provides the design ideology of the dynamical system (19). Firstly, the dynamics of u(t) is supposed to satisfy the following equation, which can force u(t) to track \(u^*(t)\).
where \(\varpi (t)>0\) is a function to be designed. By substituting (18) into (21), we have
Then, by substituting the estimations \({\hat{f}}_t\) and \(\hat{{\tilde{x}}}\) into (22), the control input can be designed as follows.
Finally, the dynamical system of input (19) is obtained by designing \(\varpi (t) = \kappa (\omega _o) |b(t)|\).
4 Performance analysis of closed-loop system
The performance of the closed-loop system based on the ADRC design (15) and (19) is investigated in this section.
The following theorem shows the satisfactory transient performance of the closed-loop system based on the proposed ADRC despite a wide class of uncertainties.
Theorem 1
Consider the system (3) with Assumptions 1–4. Let \(u(t)=0\) for \(t\in [t_0,t_u)\) where
For \(t\ge t_u\), u(t) is designed according to (15) and (19). Then, there exist positive constants \(\eta _i^*~(1\le i\le 5)\) and \(\omega ^*\) dependent on \((x(t_0),\hat{{\tilde{x}}}(t_0),{\hat{f}}_t(t_0),M_r, {\underline{M}}_{\theta ,i}, {\bar{M}}_{\theta ,i},\psi _{\phi i}, K)\) such that
for any \(\omega _o \ge \omega ^*\).
Theorem 1 demonstrates that the tracking error between the actual and desired outputs, the estimating error of the ESO (15) and the error between the actual and desired inputs are bounded. Furthermore, (25)–(27) explicitly show the bounds of the tracking error, estimating error and the error between the actual and desired inputs. More importantly, as shown in (25), the tracking error between the actual and ideal outputs can be sufficiently small for \(t\ge t_0\) by tuning \(\omega _o\) to be suitably large, which ensures the satisfied transient performance despite various uncertainties. In addition, (26)–(27) imply that both the estimating error and the error between the actual and desired inputs can converge into a neighborhood with a small boundary by suitably enlarging \(\omega _o\).
Remark 9
In the proposed design (15) and (19), the adjustable parameters are \(\kappa \), K and \(\omega _o\). According to Assumption 4, the parameter \(\kappa \) can be designed as a function with respect to \(\omega _o\), such as \(\kappa =\omega _o^k\) for a constant k satisfying \(0<k<1\). The feedback gain K should satisfy that the matrix \(A_K\) is Hurwitz, which determines the convergence rate of the desired output \(y^*\) generated by the system (17). Based on Theorem 1, the observer parameter \(\omega _o\) should be suitably large to ensure the small tracking error and estimating error.
Remark 10
The design (24) is a common way to avoid the peaking phenomenon of ESO [26, 29]. Moreover, since plenty of practical systems satisfy the initial condition that \({\tilde{x}}(t_0) = [0~\cdots ~0]^T\), by designing the initial values of ESO as \(\hat{{\tilde{x}}}(t_0)=[0~\cdots ~0]^T\), then it can be obtained that \(t_u=t_0\). In addition, for the initial values satisfying \(\varrho _0\ge \frac{1}{\omega _o}\), it can be deduced from (24) and Assumption 4 that \(t_u\) can be close to \(t_0\) by suitably enlarging \(\omega _o\).
To simplify the proof of Theorem 1, Propositions 2–3 are introduced. Proposition 2 describes the bounds of the uncertainty \(f({\tilde{x}},t)\), the control coefficient b(t) and their derivatives. Proposition 3 provides the closed-loop form and the bounds of the uncertain terms in closed-loop system. The proofs of Propositions 2–3 are given in Appendix.
Proposition 2
Let Assumption 2 holds. For any given positive constant \({\tilde{\varrho }}_x\), the functions b(t) and \(f({\tilde{x}},t)\) in (12) satisfy the following equations:
where the positive constant \(\psi _b\) and the non-decreasing function \(\psi _{f}(\cdot )\) are dependent on \({\bar{M}}_{\theta ,i}\), \({\underline{M}}_{\theta ,i}\) and \(\psi _{\phi ,i}\) for \(1\le i \le n\).
Denote the tracking error vector, estimating error vector and the error between the actual and desired inputs as follows.
where \(T_1=\text {diag}(\omega _o^{-n},\cdots ,\omega _o^{-1},1)\). Then, the following proposition presents the closed-loop system and further analyzes the properties of the uncertain terms in closed-loop system.
Proposition 3
Let Assumptions 1–3 hold. Design \(u(t)=0\) for \(t\in [t_0,t_u)\), and design u(t) by (15) and (19) for \(t\in [t_u,\infty )\). Then, the closed-loop system is shown as follow.
Moreover, the uncertain terms \(\Delta _{e0}\), \(\Delta _{\zeta 0}\), \(\Delta _{\delta _u 0}\), \(\Delta _{e1}\), \(\Delta _{\zeta 1}\) and \(\Delta _{\delta _u 1}\) have the following bounds.
for \(e\in \{e|~\Vert e\Vert \le \varrho _e \}\), \(\zeta \in \{\zeta |~\Vert \zeta \Vert \le \varrho _\zeta \}\), \(\delta _u \in \{\delta _u|~|\delta _u|\le \varrho _u \}\) and \(\omega _o\in \{\omega _o|~\omega _o\ge \omega _o^* \}\) with any given positives \(\varrho _e\), \(\varrho _\zeta \), \(\varrho _u\) and \(\omega _o^*\). The functions \(\pi _{e0}(\cdot )\), \(\pi _{\zeta 0}(\cdot )\), \(\pi _{\zeta 1}(\cdot )\), \(\pi _{\delta _u}(\cdot )\), \(\pi _{\delta _u 0}(\cdot )\) and \(\pi _{\delta _u 1}(\cdot )\) are non-decreasing and are dependent on K, \(M_r\), \({\bar{M}}_{\theta ,i}\), \({\underline{M}}_{\theta ,i}\) and \(\psi _{\phi ,i}\) for \(1\le i \le n\). The function \(\pi _\omega (\cdot )\) is non-increasing and is dependent on \({\bar{M}}_{\theta ,i}\), \({\underline{M}}_{\theta ,i}\) and K.
Based on Propositions 2–3, the proof of Theorem 1 is presented as follows.
Proof of Theorem 1
With the mapping from (x, t) to \(({\tilde{x}},t)\) presented in Proposition 1 and the discussions in Sect. 3.1, the plant (3) can be rewritten as the integrators chain system (11). Owing to Propositions 2–3, the closed-loop system is formulated as (31)–(32).
Since the matrices \(A_K\) and \(A_\varsigma \) are Hurwitz, there exist positive definite matrices \(P_K\) and \(P_\varsigma \) such that \(A_K^T P_K+ P_K A_K=-I\) and \(A_\varsigma ^T P_\varsigma + P_\varsigma A_\varsigma =-I\). Then, the following Lyapunov functions are introduced.
Let \(c_{k1}\) and \(c_{k2}\) be the minimal and maximal eigenvalues of \(P_K\) and denote \(c_{\varsigma 1}\) and \(c_{\varsigma 2}\) as the minimal and maximal eigenvalues of \(P_\varsigma \). Then, the following inequalities hold.
Next, we analyze the properties of the closed-loop system for \(t\in [t_0,t_u)\) and \(t\in [t_u,\infty )\).
Part 1: The analysis for the closed-loop system for \(t\in [t_0,t_u)\).
Owing to (11) and (17), the initial condition satisfies that \(e(t_0) = 0\). The dynamical systems (31)–(32) imply the continuity of e(t). Hence, for a sufficiently small positive constant \(\Delta t\), there exists a positive constant \(\eta _{e1}\) such that
According to Assumption 4, it can be verified that \(\lim _{\omega _o \rightarrow \infty } \frac{\ln \omega _o}{\sqrt{\kappa (\omega _o)} } = 0\). In addition, it can be verified from (24) that \(\lim _{\omega _o \rightarrow \infty } t_u = t_0\). Hence, there exists a positive constant \(\omega _1\) such that \(t_u- t_0 \le \Delta t\) for \(\omega _o \ge \omega _1\). Combined with the statement (36), it can be concluded that \(\Vert e(t)\Vert \le \eta _{e1}\) for \(t\in [t_0,t_u)\) and \(\omega _o \ge \omega _1\).
Due to Proposition 1, the bound of x(t) for \(t\in [t_0,t_u)\) satisfies that \(\sup _{t_0\le t\le t_u} \Vert x(t)\Vert \le n \psi _\varphi (\eta _{e1}+M_{x^*})\). Combined with Assumption 3, the following equation is satisfied.
which further implies that
Based on the bound of e(t) for \(t\in [t_0,t_u)\), the dynamics (31) implies that
Due to (31) and (33), the following dynamics of \(\sqrt{V_\varsigma (t)}\) and \(\sqrt{V_u(t)}\) hold for \(t\in [t_0,t_u]\).
for \(\omega _o \ge \omega _1\). With the help of Gronwall lemma, it can be deduced from (40) that \(\sqrt{V_\varsigma (t)}\) has the following bound.
Based on Gronwall lemma and (40)–(41), the bound of \(\sqrt{V_u(t)}\) is obtained as follows.
Next, the bounds of \(\sqrt{V_\varsigma (t_u)}\) and \(\sqrt{V_u(t_u)}\) will be analyzed.
Based on the initial condition \(\varrho _0> \frac{1}{\omega _o}\), the initial value of \(\sqrt{V_\varsigma }\) satisfies that \(\sqrt{V_\varsigma (t_0)} \le n\sqrt{c_{\varsigma 2}}(\omega _o^{n-1}\varrho _0^{n}+\eta _{f0})\) where \(\eta _{f0} = |{\hat{f}}_t(t_0)-f_t({\tilde{x}}(t_0),u(t_0),t_0)|\). Owing to the definition of \(t_u\) (24), the following inequalities hold for \(\frac{\omega _o}{\kappa }\ge 1\) and \(\kappa \ge \max \{1, \frac{1}{4 \psi _b^{-2} c_{\varsigma 2}^2} \}\).
Owing to (41)–(42), the following inequalities are satisfied for any \(\omega _o\ge \omega _2\), \(\kappa \ge \kappa _2\) and \(\frac{\omega _o}{\kappa }\ge \tau _2\), where \(\omega _2=\max \{\kappa _2\tau _2,\omega _1\}\), \(\kappa _2=\max \{1,\frac{1}{4 \psi _b^{-2} c_{\varsigma 2}^2}\}\) and \(\tau _2 =\max \{1,4\psi _b^{-1}c_{\varsigma 2}\} \).
Considering the initial condition satisfying \(\varrho _0 \le \frac{1}{\omega _o}\), (24) implies that \(t_u=t_0\). It can be directly proved that \(\Vert e(t_u)\Vert \), \(V_z(z(t_u))\), \(\sqrt{V_\varsigma (t_u)}\) and \(\sqrt{V_u(t_u)}\) are bounded for \( \omega _o\ge \omega _2\). Without loss of generality, the bounds of \(\Vert e(t_u)\Vert \), \(V_z(z(t_u))\), \(\sqrt{V_\varsigma (t_u)}\) and \(\sqrt{V_u(t_u)}\) can be also denoted as \(\eta _{e1}\), \(\eta _{V_z 1}\), \(\eta _{V_\varsigma 1}\) and \(\eta _{V_u 1}\), respectively.
Part 2: The analysis for the closed-loop system for \(t\in [t_u,\infty )\).
According to the control design (19) and the closed-loop system (31)–(32), the variables e,\(\zeta \),z and u are continuous at \(t_u\). To simplify the mathematical expressions in this part, we introduce the following notations.
Then, we proceed to prove that there exist positive constants \((\omega _3,\kappa _3,\tau _3)\) such that \((e(t),z(t),\zeta (t),\delta _u(t))\) stay in a bounded set \(\Omega _1\triangleq \{(e,z,\zeta ,\delta _u)~|~ \sqrt{V_K}\le \eta _{V_K2},~ \sqrt{V_z}\le \eta _{V_z 2},~\sqrt{V_\varsigma }\le \eta _{V_\varsigma 2},~\sqrt{V_u} \le \eta _{V_u 2} \}\) for \(\omega _o\ge \omega _3\), \(\kappa \ge \kappa _3\), \(\frac{\omega _o}{\kappa }\ge \tau _3\) and \(t\ge t_u\). The proof consists of the following four steps:
Step 1 We assume that there exists \(t^*\in [t_u,\infty )\) such that \(\sqrt{V_\varsigma (t^*)}= \eta _{V_\varsigma 2}\). Besides, \(\sqrt{V_\varsigma (t)}\le \eta _{V_\varsigma 2}\), \( \sqrt{V_K(t)}\le \eta _{V_K2}\), \( V_z(t)\le \eta _{V_z2}\) and \(\sqrt{V_{\delta _u}(t)} \le \eta _{V_u 2}\) for \(t\in [t_u,t^*]\). Then, it can be deduced that \(\Vert e(t)\Vert \le \eta _{e2}\), \( \Vert \zeta (t)\Vert \le \eta _{\zeta 2}\) and \(|\delta _u(t)|\le \eta _{\delta _u 2}\) for \(t\in [t_u,t^*]\). Owing to the dynamics (32) and the bound of \(\Delta _{\zeta 1}\) (33), the derivative of \(\sqrt{V_\varsigma (t^*)}\) satisfies
By selecting \(\omega _3 = \max \{\omega _2 ,6 c_{\varsigma 2} \Vert P_\varsigma \Vert (\pi _{\zeta 1}(\eta _{e2}) +\pi _{\delta _u} (\eta _{e2},\eta _{\delta _u 2}) ) / (\eta _{V_\varsigma 2}\sqrt{c_{\varsigma 1}}) \}\) and \(\tau _3 = 6 c_{\varsigma 2} \Vert P_\varsigma \Vert ( \pi _{\omega } (\omega _2) \eta _{\zeta 2} + \pi _{\delta _u} (\eta _{e2} , \eta _{\delta _u 2}) )/( \eta _{V_\varsigma 2}\sqrt{c_{\varsigma 1}} )\), (45) directly implies that \(\frac{d \sqrt{V_\varsigma (t^*)}}{dt} < 0\) for the \((\omega _o,\kappa )\) satisfying \(\omega _o\ge \omega _3\) and \(\frac{\omega _o}{\kappa }\ge \tau _3\).
Step 2 We assume that there exists \(t^*\in [t_u,\infty )\) such that \(V_z(t^*)= \eta _{V_z 2}\). Besides, \(\sqrt{V_u(t)} \le \eta _{V_u 2}\), \(\sqrt{V_K(t)} \le \eta _{V_K2}\), \( V_z(t)\le \eta _{V_z2}\) and \(\sqrt{V_\varsigma (t)}\le \eta _{V_\varsigma 2}\) for \(t\in [t_u,t^*]\). Proposition 1, the bound of x(t) satisfies that
The definition of \(\eta _{V_z 2}\) (44) implies that \(\eta _{V_z 2} \ge r_z(\sup _{t_u \le t\le t^*}\Vert x(t)\Vert ) \ge r_z(\Vert x(t^*)\Vert ).\) Due to Assumption 3, it can be verified that \({\dot{V}}_z(z(t^*)) \le 0.\)
Step 3 We assume that there exists \(t^*\in [t_u,\infty )\) such that \(\sqrt{V_u(t^*)} = \eta _{V_u 2}\). Besides, \(\sqrt{V_u(t)} \le \eta _{V_u 2}\), \(\sqrt{V_K(t)} \le \eta _{V_K2}\), \( V_z(t)\le \eta _{V_z2}\) and \(\sqrt{V_\varsigma (t)}\le \eta _{V_\varsigma 2}\) for \(t\in [t_u,t^*]\). Hence, \(\Vert e(t)\Vert \le \eta _{e2}\), \(\Vert \zeta (t)\Vert \le \eta _{\zeta 2}\), \(|\delta _u (t)|\le \eta _{\delta _u 2}\) and \(|(b(t))^{-1}|\ge \psi _b^{-1}\) for \(t\in [t_u,t^*]\). Based on (32)–(33), the derivative of \(\sqrt{V_u(t^*)}\) satisfies
Owing to the definition of \(\eta _{V_u2}\) (44), it can be verified that \(-\frac{\psi _b^{-1} \eta _{V_u 2}}{2}+ \pi _{\omega }(\omega _o)\eta _{\zeta 2} = -\pi _{\omega }(\omega _2)\eta _{\zeta 2} \le 0\) for any \( \omega _o \ge \omega _3\). By choosing \(\kappa _3 = \frac{2\sqrt{2} \pi _{\delta _u 1} (\eta _{e2},\eta _{\delta _u 2}) }{\psi _b^{-1} \eta _{V_u 2}}\), the following inequality holds for \(\kappa \ge \kappa _3\).
Hence, \(\frac{d \sqrt{V_u(t^*)}}{dt} < 0 \) for \(\omega _o \ge \omega _3\) and \(\kappa \ge \kappa _3\).
Step 4 We assume that there exists \(t^*\in [t_u,\infty )\) such that \(\sqrt{V_K(t^*)} = \eta _{V_K2}\). Besides, \(\sqrt{V_K(t)} \le \eta _{V_K2}\), \(\sqrt{V_\varsigma (t)}\le \eta _{V_\varsigma 2}\), \( V_z(t)\le \eta _{V_z2}\) and \(\sqrt{V_u(t)} \le \eta _{V_u 2}\) for \(t\in [t_u,t^*]\). Hence, \(\Vert e(t)\Vert \le \eta _{e2}\), \(\Vert \zeta (t)\Vert \le \eta _{\zeta 2}\) and \(|\delta _u(t)|\le \eta _{\delta _u 2}\) for \(t\in [t_u,t^*]\). According to (32), (33) and (44), the derivative of \(\sqrt{V_K(t^*)}\) satisfies
Due to Steps 1–4, it can be concluded that the variables e(t), z(t), \(\zeta (t)\) and \(\delta _u(t)\) stay in \(\Omega _1\) for \(t\in [t_u,\infty )\) if the parameters satisfy \(\omega _o\ge \omega _3\), \(\kappa \ge \kappa _3\) and \(\frac{\omega _o}{\kappa }\ge \tau _3\). Next, we will analyze the bounds of \(\sqrt{V_K(t)}\), \(\sqrt{V_\varsigma (t)}\) and \(\sqrt{V_u(t)}\) for \(t\ge t_u\).
The analysis of the bound of \(\sqrt{V_\varsigma (t)}\). Due to (32)–(33), for \(t\ge t_u\), we have
Combined with Gronwall lemma, \(\sqrt{V_\varsigma (t)}\) has the following bound for \(\omega _o\ge \omega _3\), \(\kappa \ge \kappa _3\) and \(\frac{\omega _o}{\kappa }\ge \tau _3\).
where \(\theta _{\varsigma 1} = (\Vert P_\varsigma \Vert (\pi _{\zeta 1}(\eta _{e2}) +\pi _{\delta _u}(\eta _{e2},\eta _{\delta _u 2}) )/\sqrt{c_{\varsigma 1}}\) and \(\theta _{\varsigma 2} = (\Vert P_\varsigma \Vert ( \pi _{\delta _u}(\eta _{e2},\eta _{\delta _u 2})+ \pi _{\omega }(\omega _3) \eta _{\zeta 2} ))/ \sqrt{c_{\varsigma 1}} \).
The analysis of the bound of \(\sqrt{V_u(t)}\). Owing to (32), (33) and (51), for \(t\ge t_u\), there is
Combined with Gronwall lemma, the bound of \(\sqrt{V_u(t)}\) for \(\omega _o \ge \omega _3\), \(\kappa \ge \kappa _3\) and \(\frac{\omega _o}{\kappa } \ge \tau _4 \triangleq \max \{\tau _3,4 c_{\varsigma 2} \psi _b^{-1} \}\) is shown as follows.
where \(\theta _{u1} = \frac{\sqrt{2} \pi _{\omega } (\omega _3) \theta _{\varsigma 1} }{ 2 \psi _b^{-1} \sqrt{c_{\varsigma 1}}}\), \(\theta _{u2} = \frac{\sqrt{2} \pi _{\omega } (\omega _3) \theta _{\varsigma 2} }{2 \psi _b^{-1} \sqrt{c_{\varsigma 1}}}\), \(\theta _{u3} = \frac{\sqrt{2} \pi _{\delta _u 1}(\eta _{e2}, \eta _{\delta _u 2}) }{2 \psi _b^{-1} }\) and \(\theta _{u4} = \frac{ \sqrt{2} \pi _{\omega } (\omega _3) \eta _{V_\varsigma 2} }{ 2 \psi _b^{-1} \sqrt{c_{\varsigma 1}} }\).
The analysis of the bound of \(\sqrt{V_K(t)}\). By denoting \({\tilde{t}}_u = t_u + \frac{\ln \omega _o}{ \psi _b^{-1} \sqrt{\kappa } }\), it can be deduced from (32) and (39) that
for \(\omega _o\ge \omega _3\), \(\kappa \ge \kappa _4 \triangleq \max \{ \kappa _3, 1 \}\) and \(\frac{\omega _o}{\kappa }\ge \tau _4\), where \(\theta _{e} = 2\sqrt{c_{k2}}n c_{\varsigma 2} (\Vert A\Vert \eta _{e1} + \pi _{e0}(\eta _{e1})) + \frac{\sqrt{c_{k2}}\Vert A_K\Vert \eta _{e2}+\sqrt{c_{k2}}\psi _b \eta _{\delta _u 2}}{\psi _b^{-1}}\). Then, the bound of \(\sqrt{V_K(t)}\) for \(t\ge {\tilde{t}}_u\) is analyzed. According to (32), (33) and (52)–(53), the dynamics of \(\sqrt{V_K(t)}\) satisfies the following equation for \(t\ge {\tilde{t}}_u\).
for \(\omega _o\ge \omega _3\), \(\kappa \ge \kappa _4 \) and \(\frac{\omega _o}{\kappa }\ge \tau _4\). With the help of Gronwall lemma, we get the following bound of \(\sqrt{V_K}\) for \(\omega _o\ge \omega _3\), \(\kappa \ge \kappa _4\), and \(\frac{\omega _o}{\kappa } \ge \tau _4\).
where \(\theta _{e1} = \frac{4 c_{k2} \Vert P_K\Vert \psi _b (\eta _{V_u 2} + \frac{\theta _{u4}}{\psi _b^{-1}\kappa _3} + \theta _{u1} )}{\sqrt{c_{k1}}} \), \(\theta _{e2}= \frac{4 c_{k2} \Vert P_K\Vert \psi _b \theta _{u2}}{\sqrt{c_{k1}}}\) and \(\theta _{e3} = \frac{4 c_{k2} \Vert P_K\Vert \psi _b \theta _{u3}}{\sqrt{c_{k1}}}\).
According to Assumption 4, there exists a positive constant \(\omega _4\ge \omega _3\) such that
for any \( \omega _o\ge \omega _4\). Notice that \(\frac{1}{\omega _o} \le \frac{\kappa }{\omega _o}\) for \(\kappa \ge \kappa _4\ge 1\). With the combination of the bounds of \(\sup \limits _{t_0 \le t\le t_u}\Vert e(t)\Vert \), \(\sqrt{V_K(t)}\), \(\sqrt{V_\varsigma (t)}\) and \(\sqrt{V_u(t)}\), i.e., (39), (51), (52), (53) and (54), the equations (25)–(27) hold for \(\omega _o \ge \omega _4\). \(\square \)

Chua’s circuit
5 Simulation
In this section, the simulation for an application example, Chua’s circuit, is presented.
Figure 2 describes Chua’s circuit, which is featured with strong nonlinearity and can generate chaotic response [42]. The mathematical model of Chua’s circuit is presented as follows [37, 42].
where \(x_1(t)\) and \(x_2(t)\) represent the voltages across the capacitor \(C_1\) and \(C_2\), \(x_3(t)\) is the current through the inductor L, u(t) is the input voltage, \(f_D(x_1)\) represents the nonlinear current caused by the nonlinear resistor D, and R and \(R_0\) are resistances. The units of voltage, current, capacitance, inductance and resistance are volt (V), ampere (A), farad (F), henry (H) and ohm \((\Omega )\), respectively.
The control objective is to design the input voltage u(t) such that the system states \((x_1(t),x_2(t),x_3(t))\) can track the reference signal (0, 0, 0).
In the simulation, the measurement of \(x_1\) can be obtained, while \(x_2\) and \(x_3\) cannot be measured. Besides, the detailed values of the system parameters, i.e., \(C_1\), \(C_2\), L, R and \(R_0\), are unknown for control design, whereas the signs of system parameters can be directly verified by physical mechanism:
According to [37, 42], the unknown nonlinear function \(f_D(x_1)\) satisfies that \(f_D(0)=0\).
Remark 11
The presented control objective is a classical stabilization problem [37, 42]. However, the methods proposed in [37, 42] require the measurements for all states, i.e., \(x_1\), \(x_2\) and \(x_3\). In this paper, only the measurement of \(x_1\) is utilized for the stabilization problem. Moreover, the nominal values of system parameters, i.e., \(C_1\), \(C_2\), L, R and \(R_0\), are unknown.

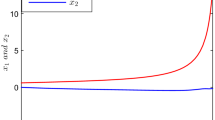
The response curves of the state \(x_1\) for Cases 1–3

The response curves of the state \(x_2\) for Cases 1–3

The response curves of the state \(x_3\) for Cases 1–3

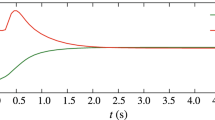
The response curves of the input u for Cases 1–3

The estimation of the state \(x_2\) via ESO for Cases 1–3

The estimation of the state \(x_3\) via ESO for Cases 1–3

The estimation of the total disturbance via ESO for Cases 1–3
Next, the proposed ADRC is applied to the system (56). Firstly, we denote the following new states.
Then, the integrators chain form is obtained as follows.
where b and f satisfy the following equation.
Due to the transformation (58), it can be verified that \([x_1~x_2~x_3]=[0~0~0]\) is equivalent to \([{\tilde{x}}_1~{\tilde{x}}_2~{\tilde{x}}_3]=[0~0~0]\). Hence, the stabilization problem of the system (56) can be reformulated as the stabilization problem of the system (59).
Although the nominal value of b is unknown due to the unknown system parameters \(C_1\), \(C_2\), L and R, it can be verified by (57) that \(\hbox {sgn}(b)>0\). Based on the sign of b, the proposed ADRC (15) and (19) with the following controller parameters is utilized.
To investigate the capability of disturbance rejection, the following cases of uncertainties are considered, including the cubic function in [37] (Case 1).
We consider the following system parameters and initial condition, which are provided in [37].
The simulation results of the proposed ADRC and the following backstepping-based funnel control [37] are presented in Figs. 3–9.
In addition, the integral of squared tracking error (ISE) and the integral of squared control input (ISCI) are presented in Table 1.
For Case 1, the satisfied closed-loop performance of the proposed ADRC and the backstepping-based funnel control is shown in Figs. 3–5. From Figs. 3–5 and ISE in Table 1, the closed-loop performance of the backstepping-based funnel control becomes poor for Cases 2–3. Especially for Case 3, the backstepping-based funnel control systems becomes unstable. Moreover, Figs. 7–9 depict the estimating performance of the proposed method, where the estimations for unmeasured integrators chain states and total disturbance are close to the real value. The satisfied estimating performance results in the highly consistent tracking performance of the proposed ADRC despite mismatched nonlinear uncertainty. Furthermore, according to the response curves of inputs shown in Fig. 6 and ISCI in Table 1, the control energy consumption of proposed ADRC is much smaller.
6 Conclusion
For a class of lower-triangular nonlinear uncertain systems, the paper proposes a new ADRC based on the control directions rather than the nominal values or the approximative mathematical expressions of control coefficients. The design ideology can be summarized as the following three parts: (1) By transforming the original states into the states of an integrators chain system, the effects from the control input and uncertainties to the controlled output are clearly shown; (2) Based on the integrators chain form, the ESO is presented to estimate the total disturbance and the integrators chain states; (3) Inspired by the approximative dynamic inversion method, a dynamical system is designed to generate the input, which can approach the desired input signal. Moreover, by associating the parameter in dynamical input design with the ESO’s parameter, the tuning method of the parameter in dynamical input design is explicitly provided. With the consideration of a large scope of mismatched nonlinear uncertainties, the transient performance of the proposed ADRC is theoretically investigated. Based on the presented theoretical results, the satisfied tracking and estimating performance can be ensured by suitably enlarging the ESO’s parameter.
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Åström, K.J., Kumar, P.R.: Control: a perspective. Automatica 50(1), 3–43 (2014)
Zhao, C., Guo, L.: PID controller design for second order nonlinear uncertain systems. Sci. China Inf. Sci. 60(2), 022201 (2017)
Benosman, M.: Model-based vs data-driven adaptive control: an overview. Int. J. Adapt. Control Signal Process. 32(5), 753–776 (2018)
Qiu, J., Gao, H., Ding, S.X.: Recent advances on fuzzy-model-based nonlinear networked control systems: a survey. IEEE Trans. Ind. Electron. 63(2), 1207–1217 (2016)
Li, S., Ahn, C.K., Xiang, Z.: Command-filter-based adaptive fuzzy finite-time control for switched nonlinear systems using state-dependent switching method. IEEE Trans. Fuzzy Syst. 29(4), 833–845 (2021)
Liu, Y.J., Tong, S., Chen, C.L.P., Li, D.J.: Neural controller design-based adaptive control for nonlinear MIMO systems with unknown hysteresis inputs. IEEE Trans. Cybern. 46(1), 9–19 (2016)
Wang, H., Liu, P.X., Li, S., Wang, D.: Adaptive neural output-feedback control for a class of nonlower triangular nonlinear systems with unmodeled dynamics. IEEE Trans. Neural Netw. Learn. Syst. 29(8), 3658–3668 (2018)
Liu, Y., Yao, D., Li, H., Lu, R.: Distributed cooperative compound tracking control for a platoon of vehicles with adaptive NN. IEEE Trans. Cybern. (2021). https://doi.org/10.1109/TCYB.2020.3044883
Li, S., Yang, J., Chen, W.H., Chen, X.: Disturbance Observer-based Control: Methods and Applicaitons. CRC Press, Boca Raton (2016)
Na, J., Jing, B., Huang, Y., Gao, G., Zhang, C.: Unknown system dynamics estimator for motion control of nonlinear robotic systems. IEEE Trans. Ind. Electron. 67(5), 3850–3859 (2020)
Selvaraj, P., Kwon, O., Lee, S., Sakthivel, R.: Uncertainty and disturbance rejections of complex dynamical networks via truncated predictive control. J. Franklin Inst. 357(8), 4901–4921 (2020)
Han, J.: From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 56(3), 900–906 (2009)
Sun, H., Sun, Q., Wu, W., Chen, Z., Tao, J.: Altitude control for flexible wing unmanned aerial vehicle based on active disturbance rejection control and feedforward compensation. Int. J. Robust Nonlinear Control 30(1), 222–245 (2020)
Tao, J., Sun, Q., Tan, P., Chen, Z., He, Y.: Active disturbance rejection control (ADRC)-based autonomous homing control of powered parafoils. Nonlinear Dyn. 86(3), 1461–1476 (2016)
Zhu, E., Pang, J., Sun, N., Gao, H., Sun, Q., Chen, Z.: Airship horizontal trajectory tracking control based on active disturbance rejection control. Nonlinear Dyn. 75(4), 725–734 (2012)
Madonski, R., Shao, S., Zhang, H., Gao, Z., Yang, J., Li, S.: General error-based active disturbance rejection control for swift industrial implementations. Control. Eng. Pract. 84, 218–229 (2019)
Wei, W., Xue, W., Li, D.: On disturbance rejection in magnetic levitation. Control Eng. Pract. 82, 24–35 (2019)
Sun, L., Shen, J., Hua, Q., Lee, K.Y.: Data-driven oxygen excess ratio control for proton exchange membrane fuel cell. Appl. Energy 231, 866–875 (2018)
Sun, L., Jin, Y., You, F.: Active disturbance rejection temperature control of open-cathode proton exchange membrance fuel cell. Appl. Energy 261, 114381 (2020)
Garzon, C.L., Cortes, J.A., Tello, E.: Active disturbance rejection control for growth of microalgae in a batch culture. IEEE Lat. Am. Trans. 15(4), 588–594 (2017)
Chen, S., Bai, W., Hu, Y., Huang, Y., Gao, Z.: On the conceptualization of total disturbance and its profound implications. Sci. China Inf. Sci. 63(2), 129201 (2020)
Guo, B.Z., Zhao, Z.L.: On convergence of non-linear extended state observer for multi-input multi-output systems with uncertainty. IET Control Theory Appl. 6(15), 2375–2386 (2012)
Zheng, Q., Gao, L., Gao, Z.: On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknow dynamics. In: 46th IEEE Conference On Decision and Control, pp. 3501–3506. (2007)
Xue, W., Huang, Y.: Performance analysis of active disturbance rejection tracking control for a class of uncertain LTI systems. ISA Trans. 58, 133–154 (2015)
Zhao, Z.L., Guo, B.Z.: A novel extended state observer for output tracking of MIMO systems with mismatched uncertainty. IEEE Trans. Automat. Control 63(1), 211–218 (2017)
Xue, W., Huang, Y.: Performance analysis of 2-DOF tracking control for a class of nonlinear uncertain systems with discontinuous disturbances. Int. J. Robust Nonlinear Control 28(4), 1456–1473 (2018)
Aguilar-Ibáñez, C., Sira-Ramirez, H., Acosta, J.A.: Stability of active disturbance rejection control for uncertain systems: a lyapunov perspective. Int. J. Robust Nonlinear Control 27(18), 4541–4553 (2017)
Chen, S., Xue, W., Huang, Y.: On active disturbance rejection control for nonlinear systems with multiple uncertainties and nonlinear measurement. Int. J. Robust Nonlinear Control 30(8), 3411–3435 (2020)
Chen, S., Chen, Z.: On active disturbance rejection control for a class of uncertain systems with measurement uncertainty. IEEE Trans. Ind. Electron. 68(2), 1475–1485 (2021)
Song, K., Hao, T., Xie, H.: Disturbance rejection control of air-fuel ratio with transport-delay in engines. Control. Eng. Pract. 79, 36–49 (2018)
Chen, S., Xue, W., Zhong, S., Huang, Y.: On comparison of modified ADRCs for nonlinear uncertain systems with time delay. Sci. China Inf. Sci. 61(7), 70223 (2018)
Bai, W., Xue, W., Huang, Y., Fang, H.: On extended state based kalman filter design for a class of nonlinear time-varying uncertain systems. Sci. China Inf. Sci. 61(4), 042201 (2018)
Wu, Z.H., Guo, B.Z.: Active disturbance rejection control to MIMO nonlinear systems with stochastic uncertainties: approximate decoupling and output-feedback stabilisation. Int. J. Control 93(6), 1408–1427 (2020)
Huang, Y., Xue, W.: Active disturbance rejection control: methodology and theoretical analysis. ISA Trans. 53, 963–976 (2014)
Wu, Z.H., Zhou, H.C., Guo, B.Z., Deng, F.: Review and new theoretical perspectives on active disturbance rejection control for uncertain finite-dimensional and infinite-dimensional systems. Nonlinear Dyn. 101(12), 935–959 (2020)
Chen, S., Huang, Y., Zhao, Z.L.: The necessary and sufficient condition for the uncertain control gain in active disturbance rejection control. arXiv:2006.11731 (2020)
Li, F., Liu, Y.: Control design with prescribed performance for nonlinear systems with unknown control directions and nonparametric uncertainties. IEEE Trans. Automat. Control 63(10), 3573–3580 (2018)
Sussmann, H.J., Jurdjevic, V.: Controllability of nonlinear systems. J. Differ. Equ. 12(1), 95–116 (2017)
Yoo, D., Yau, S.S.T., Gao, Z.: Optimal fast tracking observer bandwidth of the linear extended state observer. Int. J. Control 80(1), 102–111 (2007)
Hovakimyan, N., Lavretsky, E., Sasane, A.: Dynamic inversion for nonaffine-in-control systems via time-scale separation. Part I. J Dyn. Control Syst. 13, 451–465 (2007)
Ran, M., Wang, Q., Dong, C.: Active disturbance rejection control for uncertain nonaffine-in-control nonlinear systems. IEEE Trans. Automat. Control 62(11), 5830–5836 (2017)
Liu, L., Huang, J.: Adaptive robust stabilization of output feedback systems with application to Chua‘s circuit. Briefs IEEE Trans. Circuits Syst. Part II Express 53(9), 926–930 (2006)
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China (Nos. 62003202, 61973202 and 61903085), National Natural Science Funds for Excellent Young Scholars of China (Grant No. 62022013), Guangdong Basic and Applied Basic Research Foundation (No. 2019A1515111070) and State Key Laboratory of Synthetical Automation for Process Industries.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest regarding the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Proof of Proposition 1
Part I: The analysis of the mapping \(\varphi \). With the combination of the dynamics (3) and the explicit form of \({\tilde{x}}_i~(1\le i \le n)\) (7), it can be directly verified that \({\tilde{x}}_i = \dot{{\tilde{x}}}_{i-1}\) for \(2\le i \le n\). Then, for the transformation (7), we will prove that the term
is a function dependent on \((x_1,\cdots , x_{i-1},t)\) for \(2\le i\le n\) by mathematical induction in the following three steps.
Step 1 (Consider the case that \(i=2\)). It can be obtained that
Hence, \({\tilde{\tau }}_2\) is a function dependent on \((x_1,t)\).
Step 2 (Consider the case that \(i=k~(2 \le k\le n-1)\)). Suppose that \({\tilde{\tau }}_k~(2 \le k\le n-1)\) is a function dependent on \((x_1,\cdots , x_{k-1},t)\).
Step 3 (Consider the case that \(i=k+1~(2 \le k\le n-1)\)). Since \({\tilde{\tau }}_k\) is a function dependent on \((x_1,\cdots , x_{k-1},t)\), the state \({\tilde{x}}_k\) has the following form:
By taking the derivative of \({\tilde{x}}_k\) and utilizing the dynamics (3), there is
By comparing the form (66) with (7), it can be obtained that
Due to the supposition in Step 2, (67) illustrates that \({\tilde{\tau }}_{k+1}\) is a function dependent on \((x_1,\cdots , x_{k},t)\).
Based on the fact that \({\tilde{\tau }}_i\) is a function dependent on \((x_1,\cdots , x_{i-1},t)\) for \(2\le i\le n\), (7) can be rewritten in the following form.
According to Assumption 2, the term \(\Pi _{j=1}^{i-1} \theta _j(t)\) is nonzero for \(2\le i \le n\). Then, the mapping from \(({\tilde{x}},t)\) to (x, t) can be determined by the following recursive way.
From (68), the functions \(\varphi _1\) and \(\varphi _2\) can be obtained as follows.
Suppose that \(\varphi _i({\tilde{x}},t)\) exists for \(2\le i\le k \le n-1\). Owing to (68), we can acquire the function \(\varphi _{k+1}({\tilde{x}},t)\) as follows.
Additionally, it is obvious that \(\varphi _{n+1}({\tilde{x}},t) = t\). Moreover, the inverse of the mapping \(\varphi \) can be directly obtained by (68).
Then, the bounds of \(\varphi _i({\tilde{x}},t)~(1\le i\le n+1)\) are analyzed. Owing to the dynamics (3), the expression of \({\tilde{\tau }}_i\) (63) implies that \({\tilde{\tau }}_i\) is composed of the finite sums and products of \(x_j~(1\le j \le i-1)\), \(\phi _j~(1\le j \le i-1)\), the partial derivatives of \(\phi _j~(1\le j \le i-1)\) up to \((i-j-1)\)-th order and \(\theta _j^{(p)}~(1\le j \le i-1,0\le p \le i-j-1)\). According to Assumption 2, there exist continuous functions \({\tilde{\psi }}_{\tau ,i}(x_1,\cdots ,x_{i-1})~(2\le i \le n)\) such that
By introducing the non-decreasing continuous function
for \(\varrho _x \ge 0\), (71) implies that
Next, the bounds of \(\varphi _i\) are presented by recursive method. Denote \({\tilde{\varrho }}_x\) as a nonnegative constant. Based on (69), the bounds of \(\varphi _1\) and \(\varphi _2\) are shown as follows.
Notice that \(M_{\varphi ,1}(\cdot )\) and \(M_{\varphi ,2}(\cdot )\) are increasing functions. Suppose that
where \(M_{\varphi ,i}\) is a continuous increasing function for \(2\le i \le k\), \(2\le k\le n-1\) and \({\tilde{\varrho }}_x\ge 0\). Then, the bound of \(\varphi _{k+1} ({\tilde{x}},t)\) can be obtained as follows.
Hence, it can be concluded that there exist continuous increasing functions \(M_{\varphi ,i}~(1\le i \le n)\) such that \( \sup _{t\ge t_0,\Vert {\tilde{x}}\Vert \le {\tilde{\varrho }}_x} |\varphi _i ({\tilde{x}},t)| \le M_{\varphi ,i}({\tilde{\varrho }}_x)\) for \({\tilde{\varrho }}_x\ge 0\) and \(1\le i \le n\).
By taking the partial derivatives of \(\varphi _i\) along the dynamics (3), it can be deduced from the similar analysis (69)–(74) that there exist continuous functions \(M_{\frac{\partial \varphi }{\partial {\tilde{x}}},i}\) and \(M_{\frac{\partial \varphi }{\partial t},i}\) such that
for any \({\tilde{\varrho }}_x \ge 0\). Due to (73)–(75), (10) is proved by defining
Part II: The analysis of the mapping \(\gamma \). Based on the analysis of \({\tilde{\tau }}_i\), the mapping \(\gamma \) can be directly determined by (68). Combined with the bounds of \({\tilde{\tau }}_i\) (71)–(72), (68) further implies that
for any given \(\varrho _x\ge 0\). Notice that \(M_{\gamma ,i}(\varrho _x)~(1\le i\le n)\) are continuous increasing functions.
Similarly, by taking the partial derivatives of \(\gamma _i\) along the dynamics (3), it can be deduced from Assumption 2 that there exist continuous functions \(M_{\frac{\partial \gamma }{\partial x},i}\) and \(M_{\frac{\partial \gamma }{\partial t},i}\) such that
for any \(\varrho _x \ge 0\). Based on (76)–(77) and the notation
then (9) is proved.
1.2 Proof of Proposition 2
Firstly, the bounds of b(t), \((b(t))^{-1}\) and \({\dot{b}}(t)\) are analyzed. According to the bounds of \(\theta _i(t)\), \((\theta _i(t))^{-1}\) and \({\dot{\theta }}_i(t)\) in Assumption 2, the expression of b(t) (12) implies that
By denoting \(\psi _b = \max \{ \Pi _{i=1}^{n} {\bar{M}}_{\theta ,i}, \Pi _{i=1}^{n} {\underline{M}}_{\theta ,i}^{-1} \}\), (28) is proved.
Next, the bound of \(f({\tilde{x}},t)\) is analyzed. Proposition 1 illustrates that \(\varphi _{n+1-j}({\tilde{x}},t) = x_{n+1-j}\) for \(1\le j\le n-1\). Additionally, \({\tilde{\phi }}_i({\tilde{x}},t) = \phi _i(x_1,\cdots ,x_i,t)\) for \(1 \le i \le n\). From the expression of \(f({\tilde{x}},t)\) (12), \(f({\tilde{x}},t)\) can be regarded as a function of (x, t), denoted as \({\bar{f}}(x,t)\).
Owing to the dynamics (3) and the notation \({\bar{f}}(x,t)\), it can be verified that \({\bar{f}}(x,t)\) is composed of the finite sums and products of \(x_j~(1\le j \le n)\), \(\phi _j~(1\le j \le n)\), the partial derivatives of \(\phi _j~(1\le j \le n)\) up to \((n-j)\)-th order and \(\theta _j^{(p)}~(1\le j \le n-1,0\le p \le n-j-1)\). Due to Assumption 2, there exists a continuous function \(\psi _{f,1}(x)\) such that
which further implies that
Recalling the continuous increasing function \(\psi _\gamma (\cdot )\) in Proposition 1, owing to inverse function theorem, the inverse function of \(\psi _\gamma (\cdot )\) can be denoted as \(\psi _\gamma ^{-1}(\cdot )\) which is a continuous function in \([0,\infty )\). According to (8)–(9) in Proposition 1, the following equation holds.
Based on (81), it can be verified that
With the combination of (80) and (82), it can be obtained that
Due to the continuity of \(\psi _{\gamma }^{-1}(\cdot )\) and \(\psi _{f,1}(\cdot )\), it can be deduced that \({\bar{\psi }}_{f,1}({\tilde{\varrho }}_x)\) is a continuous function with respect to the variable \({\tilde{\varrho }}_x\).
From Proposition 1, \(\varphi _{n+1}({\tilde{x}},t)=t\) and
Then, the partial derivatives of \(f({\tilde{x}},t)\) can be expressed as follows.
Due to Assumption 2, with the similar derivation as (79), there exist continuous functions \(\psi _{fx,j}\) and \(\psi _{ft}\) such that
Based on the bounds of \(\frac{\partial \varphi _j}{\partial x_i}\) (10) and with the similar procedure as (79)–(83), there exist continuous functions \({\bar{\psi }}_{f,2}(\cdot )\) and \({\bar{\psi }}_{f,3}(\cdot )\) such that
By denoting \(\psi _f({\tilde{\varrho }}_x) \triangleq \max \{{\bar{\psi }}_{f,1}({\tilde{\varrho }}_x),{\bar{\psi }}_{f,2}({\tilde{\varrho }}_x),{\bar{\psi }}_{f,3}({\tilde{\varrho }}_x)\}\), (83) and (87) imply (29).
1.3 Proof of Proposition 3
For \(t\in [t_0,t_u)\), the control input satisfies that \(u(t)=0\). Hence, the dynamics of \({\tilde{x}}\) in (11) can be rewritten as follows.
Combined with the dynamics of \({\tilde{x}}^*(t)\) (17), the dynamics of e(t) for \(t\in [t_0,t_u)\) is shown as follows.
where
Then, consider the case that \(t\in [t_u,\infty )\). With the notation (1) and the desired input (18), the dynamics of \({\tilde{x}}\) in (11) can be reformulated as follows.
Owing to the dynamics of \({\tilde{x}}^*(t)\) (17), the dynamics of e(t) for \(t\in [t_u,\infty )\) is obtained as follows.
Before analyzing the closed-loop form of \(\zeta (t)\) and \(\delta _u(t)\), the derivative of \(u^*(t)\) is calculated due to (18).
With the help of Remark 8, the derivative of u(t) is shown as follows.
where \(K_e = [K^T~1]^T\). Since \(T_1^{-1} A_L T_1 = \omega _o A_\varsigma \), the dynamics of \(\zeta \) for \(t\in [t_0,t_u)\) can be obtained from (11) and (15):
where
Owing to (94), the dynamics of \(\zeta (t)\) for \(t\in [t_u,\infty )\) is presented as follows.
where
With the combination of (93) and (94), the derivative of \(\delta _u(t)\) is shown as follows.
where
As for the dynamics of z(t), it can be directly obtained from (11) that
Based on the dynamics of e, \(\zeta \), \(\delta _u\) and z, i.e., (89), (92), (95), (97), (99) and (101), the closed-loop form can be written as (31)–(32).
Next, we will prove that the bounds of \(\Delta _{e0}\), \(\Delta _{\zeta 0}\), \(\Delta _{\delta _u 0}\), \(\Delta _{e1}\), \(\Delta _{\zeta 1}\) and \(\Delta _{\delta _u 1}\) satisfy (33) for \(e\in \{e|~\Vert e\Vert \le \varrho _e \}\), \(\zeta \in \{\zeta |~\Vert \zeta \Vert \le \varrho _\zeta \}\), \(\delta _u \in \{\delta _u|~|\delta _u|\le \varrho _u \}\) and \(\omega _o\in \{\omega _o|~\omega _o\ge \omega _o^* \}\) with any given positives \(\varrho _e\), \(\varrho _\zeta \), \(\varrho _u\) and \(\omega _o^*\). Hence, we only need to present the detailed expressions of the functions \(\pi _{e0}(\cdot )\), \(\pi _{\zeta 0}(\cdot )\), \(\pi _{\zeta 1}(\cdot )\), \(\pi _{\delta _u}(\cdot )\), \(\pi _{\delta _u 0}(\cdot )\) and \(\pi _{\delta _u 1}(\cdot )\).
Due to Assumption 1, there is
Combined with the dynamics of \({\tilde{x}}^*\) (17), there exists a positive constant \(M_{x^*}\) such that
According to the bounds of b, \({\dot{b}}\), \(b^{-1}\), f, \(\frac{\partial f}{\partial {\tilde{x}}}\) and \(\frac{\partial f}{\partial t}\) shown in Proposition 2, (90) implies that
Due to (92), it can be directly obtained that
Owing to (96) and (98), the bounds of \(\Delta _{\zeta 0}\) and \(\Delta _{\zeta 1}\) are provided as follows.
for any \(\varrho _e\ge 0\), \(\varrho _u\ge 0\) and \(\omega _o^*\ge 0\), where \(\pi _{\zeta 1}(\varrho _e) =\psi _b^2( \psi _f(\varrho _e+M_{x^*})+\Vert K\Vert (\varrho _e+M_{x^*}+nM_r)+M_r ) + \psi _f(\varrho _e+M_{x^*}) ( 1+ \Vert A_K\Vert \varrho _e + M_{x^*} ) \), \(\pi _\omega (\omega _o^*)=\max \{1,\psi _b\}\Vert K_e\Vert \cdot \) \(\Vert T_1(\omega _o^*)\Vert \) and \(\pi _{\delta _u}(\varrho _e,\varrho _u)=\max \{\psi _b^2 \varrho _u, \psi _b \varrho _u (1+\psi _f(\varrho _e+M_{x^*}))\}\). With the help of Proposition 2, the following bounds of \(\Delta _{\delta _u 1}\) and \(\Delta _{\delta _u 2}\) are obtained from (100).
where \(\pi _{\delta _u 0}(\varrho _e) =\max \{\psi _b, \psi _b^3\} ( \psi _f(\varrho _e+M_{x^*})( 2+\Vert A\Vert (\varrho _e+M_{x^*})+\psi _f(\varrho _e+M_{x^*}) ) + \Vert K\Vert (1+\Vert A\Vert )(\varrho _e+M_{x^*}+nM_r + \psi _f(\varrho _e+M_{x^*})) + 2M_r ) \) and \(\pi _{\delta _u 0}(\varrho _e,\varrho _u) = \pi _{\delta _u 0}(\varrho _e) + \psi _b ( \psi _f(\varrho _e+M_{x^*}) +\Vert K\Vert ) ( \Vert A_K\Vert \varrho _e+ \psi _b \varrho _u + M_{x^*} + nM_r ) \).
Rights and permissions
About this article

Cite this article
Liu, P., Chen, S. & Zhao, ZL. On active disturbance rejection control for lower-triangular systems with mismatched nonlinear uncertainties and unknown time-varying control coefficients. Nonlinear Dyn 106, 2377–2400 (2021). https://doi.org/10.1007/s11071-021-06906-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06906-1