
Abstract
Offshore platforms are widely used to explore, drill, produce, storage, and transport ocean resources and are usually subject to environmental loading, such as waves, winds, ice, and currents, which may lead to failure of deck facilities, fatigue failure of platforms, inefficiency of operation, and even discomfort of crews. In order to ensure reliability and safety of offshore platforms, it is of great significance to explore a proper way of suppressing vibration of offshore platforms. There are mainly three types of control schemes, i.e., passive control schemes, semi-active control schemes, and active control schemes, to deal with vibration of offshore platforms. This paper provides an overview of these schemes. Firstly, passive control schemes and several semi-active control schemes are briefly summarized. Secondly, some classical active control approaches, such as optimal control, robust control, and intelligent control, are briefly reviewed. Thirdly, recent advances of active control schemes with delayed feedback control, sliding model control, sampled-data control, and network-based control are deeply analyzed. Finally, some challenging issues are provided to guide future research directions.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Offshore platforms are extensively used to explore, drill, produce, storage, and transport ocean oil and/or gas resources in different depths. There are several types of offshore platforms, such as self-elevating platforms, gravity platforms, steel jacket platforms, tension-leg platforms (TLPs), articulated leg platforms, guyed tower platforms, spar platforms, floating production systems, and very large floating structures. These platforms can be divided into fixed-bottom platforms and buoyant platforms, which have their own particular purposes and different configurations. To meet an increasing demand for marine sources of energy and minerals, in the past several decades, a lot of research effort has been made on offshore platforms. The related investigations are mainly focused on structure design and monitoring, damage detection, fatigue analysis and reliability assessment, mathematical modeling, and analysis of structures. Specifically, offshore platforms, which are located in a very tough ocean environment over a long period of time, are inevitably affected by environmental loading, such as waves, winds, ice, currents, flow, and earthquakes [1, 2]. The environmental loading may lead to excessive vibration of offshore platforms, thereby causing failure of deck facilities, fatigue failure of structures, inefficiency of operation, and even discomfort of crews. Note that reduction of vibration amplitude of an offshore platform by 15 percent can extend service life over two times and can result in decreasing expenditure on maintenance and inspection of structures [3]. Therefore, it is of great significance to explore proper ways to reduce different types of vibrations of offshore platforms [4].
Notice that a direct and simple way to mitigate vibration of offshore platforms is to increase the stiffness of the platforms. As a result, natural frequencies can be shifted away from resonating frequencies [5]. However, such schemes generally require extra construction material, which unavoidably leads to increasing costs. Thus, an alternative way is to choose a proper structural control method to reduce structural vibration to an acceptable level [6, 7]. In the past several decades, structural control schemes, such as passive control schemes [8], semi-active control schemes [9], and active control schemes [10], are widely utilized to reduce vibration of offshore platforms.
This paper provides an overview of recent advances in vibration control of offshore platforms. Firstly, some passive control schemes including hysteretic mechanisms, viscoelastic mechanisms, damping isolation mechanisms, and dynamic vibration absorbers utilized in vibration control are briefly outlined. Secondly, semi-active control schemes are briefly surveyed. Thirdly, active control schemes are reviewed in detail. Several active control schemes with optimal control, robust control, intelligent control, sliding mode control, sampled-data control are presented. In particular, effectiveness and superiority of delayed feedback control and network-based control, which are most recently developed active control schemes, are deeply discussed. By purposely introducing time delays into control channel of offshore platforms, delayed feedback control schemes focus on the controller design and investigate the effects of time delays on active control for the platforms. Network-based control schemes are concerned with networked dynamic modeling and controller design of offshore platforms in network settings. Finally, several challenging issues and research directions are provided.
The rest of this paper is organized as follows. In Sect. 2, several passive control schemes including hysteretic and/or viscoelastic mechanisms, damping isolation mechanisms, and dynamic vibration absorbers are outlined. Section 3 presents semi-active control strategies of offshore platforms. Section 4 surveys active control schemes for offshore platforms in recent two decades. Several challenging issues and some research directions are provided in Sect. 5. Section 6 concludes the paper.
2 Passive control
Passive control does not require any other external energy, and control force is generally derived from deformation of devices themselves, such as different passive energy dissipation mechanisms, damping isolation mechanisms, and dynamic vibration absorbers [5]. Due to easiness and lower cost to implement and retrofit, effectiveness to mitigate vibration and to maintain stability and reliability of offshore platforms, passive control has been implemented for offshore platforms extensively and successfully in the last two decades. This section gives a brief review of passive control for offshore platforms.
2.1 Hysteretic and/or viscoelastic mechanisms
Hysteretic devices include metallic dampers and friction dampers, which dissipate energy with no significant rate dependence. Viscoelastic devices are dependent on frequency. The main types of viscoelastic devices are viscoelastic solid dampers and viscoelastic fluid dampers. To mitigate vibration of offshore platforms and to avoid damage of the offshore platforms, hysteretic and/or viscoelastic systems are applied to the offshore platforms extensively. To mention a few, seismic response of an offshore platform with shape memory alloy dampers is investigated in [11], where influence of the number, location and property of the shape memory alloy dampers on vibration amplitudes of the offshore platform is discussed. It should be specified that as an intelligent material, the shape memory alloy is of advantages of preferable endurance and erosion resistance, good fatigue resistance, long-term reliability, large elastic deformation, steady mechanical properties in temperature and frequency. Therefore, using the shape memory alloy as a damper is suitable for offshore platforms. In [8], viscoelastic dampers are adopted to reduce wave-induced vibration of an offshore steel jacket. It is observed that vibration amplitudes of the platform can be reduced dramatically. By modeling an offshore platform as a multi-degrees-of-freedom system subject to wave forces, vibrations of the offshore platform with friction, viscoelastic, and viscous dampers are investigated, respectively [12]. It is found that added viscoelastic dampers increase viscous damping as well as lateral stiffness, and viscoelastic dampers are more effective to reduce wave-induced vibration of the offshore platform than viscous and friction dampers. By using a stochastic linearization technique, nonlinear behavior of friction dampers installed in an offshore platform is discussed in [13]. The results show that optimally regulating friction dampers leads to considerable reduction of topside displacement and velocity variances for deepwater platforms, while efficiency of such devices decreases for shallow water platforms. Note that an energy dissipation rate in friction dampers is displacement dependent, and damping force is independent of velocity response of the structure and frequency of excitations. Consequently, friction dampers are specifically suitable for low-frequency excitations. In [14], by using a hydrodynamic buoyant mass damper, which utilizes damper buoyancy and inertia forces, and hydrodynamic damping effects, displacement responses of an offshore platform subject to waves are investigated.
2.2 Damping isolation mechanisms
To dissipate unwanted vibration of offshore platforms, designing an isolation mechanism placed between the bottom of deck and above the structure is also one of simple and effective ways. For example, a damping isolation mechanism composing of rubber bearings and viscous dampers is developed to suppress vibration of offshore platforms subject to earthquake excitations and ice loads [3]. Both experimental and numerical studies are carried out to validate effectiveness in suppressing vibration of the platforms. In [15], by using eight lead rubber bearings as isolators, a lead rubber isolation mechanism is developed to mitigate earthquake-induced vibration of a steel jacket offshore platform. Based on a platform in the Persian Gulf, numerical studies are made to show effectiveness of the proposed isolation mechanism. Note that the vibration acceleration of deck is an important factor influencing human comfort and fatigue life of tubular joints [16]. Experiments on steel rubber vibration isolator are carried out to investigate the performance of offshore steel jacket platforms in different low temperature conditions [17]. In [18], to reduce ice-induced vibration acceleration and avoid non-structure failure of jacket platforms, an isolation cone mechanism composing of cones, springs, and dampers is developed and installed between ice sheets and piles of jacket platforms.
It is demonstrated from experimental and computational results that the proposed damping isolation strategies are very effective to reduce vibration of offshore platforms. However, due to the fact that damping isolation strategies are generally utilized on newly built offshore platforms, to maintain and retrofit such mechanisms are not always economical and convenient.
2.3 Dynamic vibration absorbers
Note that using damping dissipation devices to dissipate vibration energy generally requires large relative deformation of the devices. However, relative deformation of damping devices is not always large enough, which makes vibration reduction unsatisfactory. In this case, dynamic vibration absorbers are feasible options. By transferring some vibration energy to absorbers, an energy dissipation demand on dominant vibration modes of offshore platforms is accomplished. The basic two types of dynamic vibration absorbers are tuned mass dampers (TMDs) and tuned liquid dampers (TLDs). In the past decades, TMD and TLD mechanisms have been extensively implemented to mitigate vibration of offshore platforms.
2.3.1 TMD mechanisms
A TMD device is composed of a mass, a spring, and a viscous damper mechanism. It is generally installed in primary vibrating structures to suppress vibration of the structures [19]. Due to remarkable advantages, such as effectiveness of refraining vibration and easiness of implementation, TMD mechanisms are extensively used for suppressing vibration of offshore platforms. In [10], a TMD is used to reduce vibration of an offshore steel jacket platform subject to self-excited hydrodynamic forces. In [20], a TMD device is installed inside columns of a TLP hull to attenuate amplitudes of heave motion. In [21], based on a simplified single-degree-of-freedom system of an offshore steel jacket platform with a TMD, energy dissipation and transmission issues of the offshore platform are investigated, and an optimized TMD design for the system is presented. In [22], a TMD is installed at the bottom of deck plate of a multi-legged articulated tower to decrease its bending moment. The feasibility of using a TMD device to mitigate ice-induced vibration of offshore platforms in the Bohai Bay is studied experimentally [23]. The results show that an optimally tuned TMD can attenuate ice-induced vibration of offshore platforms favorably.
Note that a single TMD is generally effective to attenuate a single vibration mode of structural systems. To guarantee that more than one distinct vibration modes can be influenced, multiple TMDs are then introduced [24, 25]. In [26], the effectiveness of multiple TMDs on suppressing wave-induced vibration of an offshore platform is studied. The multiple TMDs are also used to mitigate the vibration of a TLP under random wave forces. The vibration amplitudes of heave and pitch motion [27] as well as surge motion [28] are investigated, respectively. It is shown that multiple TMDs outperform a single TMD in terms of reducing oscillation amplitudes of offshore platforms.
As aforesaid that TMD mechanisms have good control effect. However, such methods generally add additional loads to offshore platforms. Therefore, applying such schemes to deepwater platforms and flexible platforms is not always feasible. To overcome disadvantage of TMDs, where an additional mass is required to be the mass body of a damper, an extend TMD and multiple extended TMD mechanisms are proposed to reduce vibration of offshore platforms subject to earthquake and wave loads, respectively [29, 30].
In [31], a TMD mechanism and a friction damper are applied to reduce wave-induced vibration of an offshore platform, respectively. It is indicated that the TMD and friction damper are both efficient in mitigating fatigue damage of the offshore platform. It is also found that the former is more dependent on the dynamic characteristics of the platform, and the latter is more efficient for fixed steel jacket platforms. In [32], by combining a TMD with a friction damper device, a hybrid damping system is developed to control wave-induced and seismic vibrations and fatigue damage of offshore platforms. In [33], based on the principle of TMD mechanisms, an anti-vibration device is designed and installed on a similar model of a jacket platform to control vertical and horizontal vibrations, respectively.
2.3.2 TLD mechanisms
Due to effectiveness of vibration mitigation, low cost of manufacturing, convenience of installation and maintenance, availability of liquid, TLD devices are introduced to control vibration of offshore platforms. In this control mechanism, liquid, preferably water, is used as a damping mass, and liquid motion inside the damper leads to oscillations in counter phase to structures and corresponding damping effects [34], i.e., the system generally utilizes water sloshing force to attenuate vibration of the structures. Specifically, such a system can be used as an additional water reserve for building water supply and fire fighting.
The earliest TLD device used in vibration control of offshore platforms can be found in [35], where a liquid storage tank is placed on an offshore platform to reduce wind-induced vibration. In [36], a liquid storage container is mounted on the top of a fixed offshore platform and is used as a TLD device to suppress vibration induced by earthquakes. Based on theoretical analysis, scale model test, and full-scale field experiment, TLD containers are designed to reduce ice-induced vibration of a Bohai production jacket platform, i.e., JZ20-2 MUQ platform [37]. In [38], a cylinder TLD is applied to reduce vibration of a jacket platform subject to earthquakes. It is found that the ratio of fundamental sloshing frequency of liquid to natural frequency of the structure is a key factor to control seismic vibration. In [39,40,41], by using air springs and water columns, tuned oscillators are presented to suppress vertical motion of a deepwater TLP. The oscillators, which are mounted on the exterior of the TLP columns, consist of several vertical caissons, which are open at bottom of the sea and closed on top of a dual chamber. It is shown theoretically and experimentally that the oscillators can obtain considerable reduction of vibration, while the mass of platform does not increase.
By adopting shape of water tanks, the properties of TLDs can be changed easily [34]. For instance, a traditional TLD device can be extended as a tuned liquid column damper, which is a U-shape tubelike device and dissipates energy by liquid flow between two liquid columns [42, 43]. The tuned liquid column damper requires no mechanical components. Therefore, it is easy to retrofit the damper without providing additional mass and to modify its natural frequency and damping characteristics. Such a mechanism attracts extensive attention in vibration control of structures [43]. In [44], active control of a tension-leg type of platform incorporated with a tuned liquid column damper is studied both analytically and experimentally. The effectiveness of reducing surge wave motion of the platform in terms of vibration amplitudes and resonant frequencies is demonstrated.
In [45], a circular tuned liquid column damper is installed on an offshore platform to mitigate structure vibration excited by ground motions. In [46], by replacing an orifice in the tuned liquid column damper with a coated steel ball, which is immersed inside a horizontal column of the damper, a tuned liquid column ball damper is presented. Such a device is also used to mitigate wave-induced vibration of an offshore platform [47]. It is shown through simulation results that the ball damper performs better than the tuned liquid column damper. In [48], by replacing an orifice tube with a smaller horizontal tube and combing a tuned liquid column damper with buoyant members of a TLP, a water tuned liquid column damper system is developed. Experimental results show that wave-induced vibration and measured tension forces of TLP tethers can be reduced significantly. In addition, structural safety can be ensured for the TLP with water tuned liquid column damper mechanisms. In [49, 50], a tuned liquid column-gas damper presented by [51, 52] is introduced to control vibration of offshore jacket platforms under seismic excitation. To mention a few, tuned liquid column dampers adjust frequency by only tuning length of the columns, while liquid column vibration absorbers adjust frequency by tuning columns cross section. However, column-gas dampers adjust frequency by tuning gas pressure in vertical columns as well as column length and cross section. It is found that column-gas dampers can reduce root-mean- square (RMS) values of vibration amplitudes significantly. To deal with restriction of a large horizontal length using conventional tuned liquid column dampers, in [53], an S-shaped tuned liquid column damper is proposed to suppress horizontal motion and vertical in-plane rotation of a deep-sea floating platforms.
3 Semi-active control
Note that semi-active control is a characteristic of controllable damping over continuous range, fast response, and potentially low power requirements [4]. Combining reliability of passive control and several advantages of active control, semi-active control is widely used in engineering vibration areas. Specifically, it requires less energy to obtain better control effect [54]. Because of high reliability, inherent stability, insensitivity to temperature, small power requirement, magnetorheological (MR) dampers receive considerable attraction in vibration control of offshore platforms. Generally, an MR damper is composed of a hydraulic cylinder, which contains micro-sized particles suspended with a fluid. The damper characteristics of the MR can be generated by adjusting the strength of magnetic field [55].
In [9], an MR damper is applied to suppress wave-induced vibration of an offshore platform. Simulation results indicate that semi-active control with the MR damper can reduce the maximum and the RMS values of vibration amplitude of the platform effectively. To attenuate wave-induced vibration of an offshore platform subject to hydrodynamic forces, semi-active control strategy using MR dampers is verified for the offshore platform experimentally and numerically [56, 57]. In [58, 59], a fuzzy MR controller is designed to control an offshore platform subject to wave forces, and the effectiveness of the semi-active controller is investigated numerically and experimentally. Located in Bohai Gulf of China, a JZ20-2NW offshore platform is the first platform structure with an MR damper. By using signals of main deck acceleration and isolation layer deformation, a Kalman filter is designed to estimate system states of the platform first; then, ice- and seismic-induced vibration responses of the offshore platform are investigated [60]. A linear quadratic Gaussian method only using structural acceleration signal is developed to reduce vibration of a steel jacket platform with an MR damper [61]. Simulation results show that such a semi-active control strategy can attenuate vibration of the offshore platform under random wave excitation. By combining feedforward neural networks and fuzzy control methods, a neuro-fuzzy controller is proposed to control wave-induced vibration of an offshore platform equipped with an MR damper [62], where a neural network is used to approximate the nonlinear dynamic system, and a fuzzy logic controller is adopted to determine control force of the MR damper. It is demonstrated that an intelligent semi-active controller is more effective than a linear quadratic Gaussian optimal controller with an MR damper. In [63], a combination of four MR dampers and six friction pendulum isolators on the joints of a cellar deck is developed to control seismic vibration of a jacket offshore platform.
4 Active control
In practical applications, a passive control device usually exhibits its limitations, such as aging and endurance, long-term working reliability, and renovation or substitution after strong shocks [11]. In addition, the control force is not adjustable in real time [4]. Consequently, passive control should give way to active control, which can achieve better control performance due to an introduction of external control energy. Also, compared with passive control, active control has lower weight and volume, wider bandwidth, and even potential to perform self-diagnosis [4]. Generally, an active control device consists of an actuator unit, a sensor unit, and a control unit. In the past several decades, active control has gained increasing attention both in theory and in practice, and various active control mechanisms are proposed for offshore platforms, to mention a few, active mass damper (AMD) mechanisms, active tendon mechanisms [10, 64], active tuned mass damper (TMD) mechanisms [65, 66], propeller thruster mechanisms [64, 67,68,69], and even their combinations [70]. Based on these mechanisms, a number of efficient active schemes are reported in the literature, which are given in detail as follows.
4.1 Optimal control
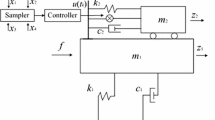
As an advanced control technology, optimal control aims at optimizing a certain objective function which is related to performance of a control system. In the last two decades, optimal control is widely applied to active control of offshore platforms. For example, in [71], a linear quadratic optimal control scheme is used to suppress wave-induced vibration of an offshore steel jacket platform with an active TMD mechanism, where a hydraulic servomechanism is designed to regulate motion of the damper by designed an optimal controller. By taking into consideration the first and second vibration modes of an offshore platform with an active TMD mechanism shown in Fig. 1, a two-loop feedback design scheme with linear quadratic control theory is proposed for an offshore platform subject to hydrodynamic forces [72]. In this control framework, an inner loop is designed to regulate linear part of the platform dynamics, while an outer loop is developed to accommodate nonlinearities and maintain stability of the overall system. In [73], a classical linear optimal controller in the frequency domain is presented. It is observed that an active TMD is capable of reducing vibration of an offshore platform significantly. By treating wave forces as output signals of a linear filter, a nonlinear stochastic optimal control strategy for a wave-excited jacket platform is developed [74].

An offshore steel jacket structure with a TMD [72]
For an articulated leg platform under random sea state, a linear quadratic optimal controller is designed to reduce vibration of an offshore platform [75]. Compared with existing optimal control methods, an involved performance function depends on displacement, velocity, as well as acceleration of the platform. Moreover, by using an iterative frequency domain technique, system nonlinearities are also considered. In [76], an optimal control method is applied to a TLP to control coupled dynamic responses of the low-frequency hull motion and the bending strain of the system tendons. The effectiveness of the control scheme is verified experimentally based on a 1 / 100 scale model of a Japan Ocean Industries Association TLP. In [77], an optimal controller is designed to control nonlinearly coupled responses of a TLP subject to random sea wave forces and wind loads. By treating a TLP as a tridimensional rigid body with six degrees of freedom and regarding the tendons as elastic springs, an optimal controller is proposed to reduce heave displacement amplitudes [78]. In [79], linear quadratic Gaussian controllers are designed to reduce axial dynamic stress response of deepwater risers by using a winch.

An offshore steel jacket structure with an AMD [80]
For jacket-type offshore platforms subject to wave forces, dynamic responses are primarily dependent on the dominant frequency of exciting wave forces and the first natural frequency of offshore platforms [10]. Based on a single-degree-of-freedom model with an AMD mechanism shown in Fig. 2 [80], where only the first vibration mode of an offshore steel jacket platform is considered, a feedforward and feedback optimal control (FFOC) scheme is presented to attenuate vibration of the platform subject to regular wave forces [81]. Further, by modeling irregular wave forces acting on an offshore platform as output signals of a linear exogenous system, a discrete-time FFOC scheme is developed [82]. Taking actuator time delays into account, a discrete FFOC controller with memory is designed for an offshore platform [83], where the platform system with control delays is transformed into a non-delay linear system. It is found from [81, 82] and [83] that the designed FFOCs are effective to reduce wave-induced vibration of the platform. In [84] and [85], optimal tracking control strategies are introduced, both continuous feedforward and feedback optimal tracking controllers and discrete-time feedforward and feedback optimal tracking controllers are developed, respectively. In [86], by modeling dynamic characteristics of actuator faults as an output of a linear exogenous system, an observer-based optimal fault-tolerant controller for an offshore platform is designed such that reliability of the offshore platform with actuator faults can be ensured.
Remark 1
From the above analysis, it is clear that optimal control paves an effective way to attenuate vibration of offshore platforms to a safe level. However, some existing results on optimal control usually require that models of offshore platforms are exactly known, which is not the situation in reality due to the fact that uncertain external loading is frequently imposed on the platforms. It is still challenging to extend those results to uncertain and general dynamic models of offshore platforms, which is a significant research topic in the future.
4.2 Robust control
Robust control is to design proper state/output feedback controllers against uncertainties and external disturbance such that the worst-case value of some cost criteria related to offshore platforms can be minimized. In [67] and [70], optimal frequency domain approaches are developed to suppress wave-excited vibration of an offshore platform with AMD mechanisms, where the \(H_2\) norm of transfer function from wave forces to regulated outputs is minimized. It is shown that control devices are useful in reducing amplitudes of displacement response of the platforms. For a simplified offshore steel jacket platform with AMD mechanisms, \(H_2\) control schemes are proposed to suppress wave-induced vibration of the system [80, 87, 88]. In [89], a robust mixed \(H_2/H_\infty \) control method is presented to attenuate wave-excited vibration of the platform. A pure delayed state feedback \(H_\infty \) control scheme is introduced to control an offshore platform [90], where the required control force and the vibration amplitudes of the offshore platform with a traditional \(H_\infty \) controller, a discrete FFOC [82] as well as a delayed \(H_\infty \) controller are investigated. In [91], a robust sliding mode \(H_\infty \) controller is designed for an offshore platform with an active TMD mechanism to reduce vibration excited by hydrodynamic forces and external disturbance. Recently, by considering controller perturbations caused by physical limitations, component aging or failure, a delayed non-fragile \(H_\infty \) controller is developed to improve the performance of an offshore platform [92].
Remark 2
Notice that offshore platforms are a class of highly coupled nonlinear uncertain systems subject to external disturbance. It is of importance to guarantee the stability and reliability of offshore platforms from the practical point of view. A remarkable advantage of robust control is robustness against discrepancies between a developed model and a real system, parametric perturbations, and external disturbance. Based on an ideal and simplified model, some nice results are reported in the literature using robust \(H_2\) and/or \(H_\infty \) control schemes. However, most of them are mainly based on steel jacket platforms subject to external wave forces and/or nonlinear hydrodynamic forces, while few of them are based on TLPs, self-elevating platforms, gravity platforms, spar platforms, or very large floating structures.
4.3 Intelligent control
In recent years, applications of soft computing, such as artificial neural networks and fuzzy logics, attract increasing attention in the field of structural vibration control. Due to several advantages including the ability to handle nonlinear behaviors, the inherent robustness, fault tolerance, and generalized capability, neural networks and fuzzy logics are introduced to active control for offshore platforms. In [93], back propagation neural network-based active control is proposed to suppress vibration of an offshore platform subject to random waves. In such a control framework, a neural network is trained off-line with data from numerical results, which are based on a classical linear quadratic optimal control method. A robust control method using a modified probabilistic neural network is applied to attenuate vibration of a fixed offshore platform under random waves [94]. Recently, neural network-based controllers are designed to moderate vibration of an offshore platform under earthquakes [95] and wind-induced random ocean waves [96], respectively. In [97], based on combination of gray prediction, support vector machines, a dynamic stiffness matrix method, and an adoptive inverse control method, an adaptive inverse controller is developed to decrease vibration of offshore platforms subject to wave and wind loads.
It is observed that network control and fuzzy control strategies are practical and efficient to deal with an active control problem of offshore platforms. However, except for the aforesaid intelligent control schemes, few results are reported for offshore platforms. Thus, further research exploring new intelligent control schemes for different types of offshore platforms subject to complicated ocean environment loading is expected in the near future.
4.4 Sliding mode control
It is well known that offshore platforms involve some uncertainties such as unknown system parameters and structure flexibility. Most importantly, offshore platforms are usually affected by various disturbance, such as waves, currents, winds, ice, and earthquakes. As an efficient method to cope with parameter uncertainties and unmodeled dynamics, sliding mode control strategies [98] are recently introduced to control vibration of offshore platforms. In [99], an optimal sliding mode controller with a specified decay rate is proposed to control wave-induced vibration of an offshore platform with an AMD mechanism. Based on a linear transformation, an offshore platform system is decomposed into two subsystems. The velocity of an AMD is considered as a virtual control for the first subsystem, and an optimal virtual controller is derived. Then, an optimal sliding mode controller with a specified decay rate is proposed for the original system. It is found that response amplitudes of displacement and velocity of the offshore platform with an optimal sliding mode controller are smaller than those with a discrete FFOC [82]. Moreover, control force required by the former is smaller than that by the latter.
For an offshore steel jacket platform with an active TMD mechanism [65, 72], robust integral sliding mode control schemes for the offshore platform subject to hydrodynamic forces and parameter perturbations are developed [100]. Simulation results show that the performance of the offshore platform with integral sliding mode controllers is better than the one with a nonlinear controller [65] and a dynamic output feedback controller [101]. In [102], by taking into account the uncertainties not only on the natural frequency and the damping ratio of the offshore platform and the TMD, but also on the damping and stiffness of the TMD, a new uncertain dynamic model for the offshore platform is established. Based on the proposed dynamic model, sliding mode controllers with mixed current and delayed states are presented. In [103], by combining sliding mode control with an adaptive control algorithm and a wavelet support vector machine method, an adaptive integral sliding mode controller is developed to improve the control performance of the offshore platform. In [104], an adaptive output feedback integral sliding mode control schemes are investigated. Note that in [65, 72, 100, 102,103,104], only hydrodynamic forces and parametric uncertainties are considered, while external loading is ignored. Fortunately, in [91], by taking into account external disturbance acting on the first two vibration modes and parametric uncertainties, robust sliding mode \(H_\infty \) controller is designed to reduce oscillation amplitudes of the offshore platform. It is found through simulation results that compared with a traditional \(H_\infty \) controller and a sliding mode controller, a sliding mode \(H_\infty \) controller requires much less control force; oscillation amplitudes of the offshore platform with a sliding mode \(H_\infty \) controller are less than those with a sliding mode controller.
The sliding mode control schemes aforementioned are mainly based on two simplified dynamic models [65, 72, 80] of offshore steel jacket platforms, and the effectiveness of the designed controllers is demonstrated only by simulation results. From the control implementation point of view, vibration experiments even field tests for offshore platforms are necessary. It should be mentioned that, because of high efficiency, simplicity, and robustness, sliding mode control is also a potential alternative to vibration reduction for other offshore platforms except for steel jacket platforms.
4.5 Sampled-data control
Under the above control schemes, state/output feedback controllers are designed in the continuous-time domain. When a continuous-time controller for an offshore platform is implemented in practice, control signals are usually transmitted in a digital form, which results in a sampled-data system [105, 106]. Hence, some sampled-data control schemes are introduced to control of offshore platforms. By taking input time-varying delays, actuator faults, and linear fractional uncertainties into account, a robust fault-tolerant sampled-data \(H_\infty \) controller is developed to suppress wave-induced vibration of an offshore steel jacket platform [107]. For an offshore steel jacket platform subject to hydrodynamic forces, robust sampled-data control schemes are presented to attenuate vibration of the platform with actuator faults and parametric perturbations [108,109,110]. Simulation results indicate that the sampled-data control schemes can significantly reduce wave-induced vibration and thereby improve the control performance of the offshore platforms. Furthermore, it is found that, compared with continuous-time controllers, sampled-data controllers may take less control cost, while vibration amplitudes of offshore platforms can be reduced to the similar level.
4.6 Delayed feedback control
Under some circumstances, by properly introducing time delays into control channel, control performance of some practical systems can be improved [111,112,113,114]. Bearing that into mind, several delayed feedback control strategies are introduced to mitigate vibration and improve the performance of offshore platforms. In the following, a brief review is presented on this issue.
In [101], by artificially introducing a constant time delay into the control channel, a delayed dynamic output feedback controller (DOFC) is designed for an offshore steel jacket platform with an active TMD mechanism, and the effect of the introduced time delay on dynamic output feedback control is investigated. It is shown through simulation results that the gain of the delayed DOFC is smaller than the one of a conventional DOFC in the sense of Euclidean norm, while internal oscillation amplitudes of the offshore platform can be significantly reduced by a delayed DOFC. Thus, it is clear that properly introduced a time delay can improve control performance of the offshore platform. However, some limitation still remains in [101]. In fact, the designed controller requires a large control force. In addition, the controller is effective only if the introduced time delay is less than 0.11 seconds, which is quite small from an implementation point of view. To solve this problem, in [102], a sliding mode controller using mixed current and delayed states (SMC-MCDS) is developed and the effects of time delays on sliding mode control for an offshore steel jacket platform are investigated. It is observed that the proposed controller is more effective in both improving the control performance and reducing control force of the offshore platform than some existing ones, such as the delay-free sliding mode controller (SMC) [100], the DOFC [101], and the nonlinear controller (NLC)[65]. The detailed results are given in Table 1, where \(x_1\), \(x_2\) and \(x_3\) represent peak-to-peak oscillation amplitudes of the first, second, and third floors of the offshore platform, and u denotes the range of the required control force peak to peak. Furthermore, it is found that the introduced time delay in this scheme can take values in different ranges, while the corresponding control performance of the offshore platform is almost at the same level. Specifically, the introduced time delay for the SMC-MCDS is in the range from 0.43 s to 0.56 s [102], while the feasible time delay for the delayed DOFC is only less than 0.11 s [101].
Recently, by using both the current and delayed signals [102], delayed non-fragile \(H_\infty \) control [92], delayed adaptive sliding mode control [103], and delayed adaptive output feedback sliding mode control [104] are designed and the performance of the proposed controllers is analyzed based on simulation results. In [115], a time-varying delay is intensionally introduced into the control channel, and a delayed robust sliding mode \(H_\infty \) controller is developed to reduce internal oscillations of an offshore platform. The positive effect of the introduced time-varying delay on robust sliding mode \(H_\infty \) control for the system is investigated. It is found that control force required by the proposed controller is smaller than the one by a robust sliding mode controller and a robust sliding mode \(H_\infty \) controller [91].
On the other hand, by only using delayed signals, pure delayed feedback control schemes are developed for offshore platforms. For example, for an offshore steel jacket platform with an AMD mechanism, a pure delayed \(H_\infty \) controller is developed to attenuate wave-induced vibration [90]. It is found that, compared with the FFOC [82], both vibration amplitudes of the offshore platform and required control force with the pure delayed \(H_\infty \) controller are smaller than those with an FFOC. It should be mentioned that vibration amplitudes of the offshore steel jacket platform with the pure delayed \(H_\infty \) controller are at the same level as the one with a delay-free \(H_\infty \) controller, while required control force by the former is much smaller than the one by the latter. Similar results can also be found in [116], where a pure delayed state feedback non-fragile control scheme is investigated for offshore platforms with a TMD mechanism and controller perturbations. It is observed that by choosing proper time delays, vibration amplitudes of the offshore platforms with a pure delayed control scheme are the same as or smaller than the ones with a delay-free control scheme, while required control force by the delayed control scheme is smaller than that by the delay-free control scheme.
Remark 3
It is true that intensionally introducing proper time delays can reduce vibration amplitudes and required control force of an offshore platform. However, some challenging issues need to be addressed. For instance, delayed feedback control schemes are mainly based on simplified dynamic models of offshore steel jacket platforms. As a result, only the first vibration mode or the first two vibration modes are considered, while other higher vibration modes are ignored. Moreover, how to choose a proper time delay with positive effects on offshore platforms is still challenging.
4.7 Network-based control
Network-based control provides an advanced remote control strategy, where control components, i.e., physical plants, sensors, controllers, and actuators, are connected through a communication network. Network-based control has several advantages including low control costs, ease of installation and maintenance, and high reliability and thus has gained much attention [117,118,119,120,121,122,123]. On the other hand, offshore platforms are generally located far away from land and always affected by complicated and harsh ocean environmental loads. Thus, network-based control paves an effective way to lower control costs and simplify installation and maintenance of an offshore platform, while the safety of staff on the platform can be ensured. In the recent years, several networked dynamic models and active network-based control schemes for offshore platforms are developed.

A network-based offshore platform with a TMD [124]
Based on an offshore platform with an active TMD mechanism [65, 72] or an AMD mechanism [80], network-based dynamic modeling and controller design are presented in [124] and [127], respectively. As shown in Fig. 3, by inserting a communication network over the offshore platform, a network-based model of the offshore platform is established. In this network-based model, an actuator is placed on the top of the offshore platform and connected to the TMD to regulate the motion of the damper; several sensors are placed on the TMD, the first floor and the second floors to measure their displacements and velocities; and a network-based controller is located in a land control station. Then, a network-based state feedback controller is designed to suppress the amplitudes of the offshore platform [124]. Under this scheme, the corresponding closed-loop system of the offshore platform is modeled as a system with an interval time-varying delay [125, 126]. Simulation results show that both the oscillation amplitudes of the offshore platform and the required control force with the network-based state feedback controllers (NSFCs) are smaller than those with the NLC [65] and the DOFC [101]. Moreover, oscillation amplitudes of the offshore platform with a network-based feedback controller are almost the same as those with the integral SMC [100], while the required control force is smaller than that required by an integral sliding mode controller, which is given in Table 2.
In [127], a network-based control model is introduced for an offshore platform with an AMD mechanism in the presence of actuator faults, where an event-triggered mechanism is utilized to save the limited resources of the communication networks [128,129,130,131]. The network-based control diagram is illustrated in Fig. 4. Based on this network-based model, an event-triggering \(H_\infty \) reliable controller is designed by employing the Lyapunov–Krasovskii functional approach. It is found that for possible actuator failures, a network-based controller is capable of guaranteeing the stability of the offshore platform. Compared with a traditional \(H_\infty \) controller, a network-based controller can suppress vibration of the offshore platform to almost the same level, while requiring less control costs. Furthermore, with the event-triggered \(H_\infty \) controller, limited network resources can be saved significantly.

A control diagram of a network-based offshore platform with an AMD [127]
Remark 4
As mentioned above, network-based control can improve the control performance of offshore platforms. However, using communication networks unavoidably leads to some unfavorable factors, such as network-induced delays, packet dropouts, quantization errors, and network congestion. By taking network-induced delays into account, network-based control for offshore platforms is studied in [124] and [127]. However, sustained attention to network-based control for offshore platforms is still worthy to be paid. Specifically, by taking one or more factors aforementioned into consideration, it is an interesting research topic to explore a network-based dynamic model and develop effective network-based controllers for floating offshore platforms in ocean environments.
5 Some challenging issues and research directions
Although a great number of research results on vibration control for offshore platforms are reported in the literature, there are still some challenging issues to be addressed. In what follows, some research directions are suggested, especially on active control of offshore platforms.
-
A challenging problem is to establish a proper mathematical model that can exactly reflect the dynamics of an offshore platform. Most results mentioned in this paper are based on a simplified dynamic model, where either only the most dominant mode or the first and the second vibration modes of the offshore platform with a single load are considered. However, offshore platforms are of characteristics of combinations of multi-vibration-modes. Moreover, offshore platforms are usually subject to parametric perturbations, nonlinear dynamics, and mixed effects of external disturbance, such as winds and waves, or earthquake, and waves and flow. Therefore, it is significant to develop a nonlinear model for an offshore platform such that its overall performance can be improved;
-
Based on a framework of multi-objective control, a delayed feedback control scheme is one of an interesting topics for active control of offshore platforms. From the mitigating vibration of offshore platforms and saving the control cost point of view, delayed feedback control strategies are effective and have some distinct advantages. However, the obtained results are mainly based on theoretical analysis and simulations. From the implementation point of view, how to utilize these theoretical results in practical offshore platforms should be re-evaluated. Specifically, for delayed control schemes, it is a key point to choose proper time delays intentionally introduced and thereby to guarantee the control performance of offshore platforms. As a result, a critical value, an optimal value, and/or interval of time delays with positive effects on control performance of offshore platforms should be further investigated. Another issue of delayed feedback control strategies is that all the current and delayed states are assumed to be available for controller implementation. If some states and delayed states are not available, alternatives deserves deeper investigation;
-
Networked dynamic modeling and control for offshore platforms are still attractive and challenging though some results on these issues are available in the literature [124, 127], where the results are based on an ideal dynamic model of offshore platforms and only network-induced delays are considered. In fact, besides network-induced delays, other network-induced factors including packet dropouts, packet disorders, quantization errors, and network congestion need to be considered for modeling and control of offshore platforms in network environments. Up to date, for offshore platforms, especially for the floating type of structures, such as TLPs, semi-submersible platforms, spar platforms, floating production storage and offloading systems, and very large floating structures, by taking into account one or more of network-induced delays, packet dropouts, packet disorders, quantization errors, and network congestion, to establish more general network-based dynamic models and design effective network-based controllers is still a challenging topic;
-
Note that neural networks are suitable for approximating nonlinear systems and fuzzy logics are efficient to handle systematic nonlinearities and uncertainties and easy to implement for structural systems. Offshore platforms are typical nonlinear systems. However, study on intelligent structure and/or intelligent controllers, such as neural network controllers, fuzzy logic controllers, and even hybrid neuro-fuzzy controllers that possesses the capabilities of adaptive regulation and intelligent information processing simultaneously, has not been adequately explored for offshore platforms. Specifically, since it is very complicated and impossible for offshore platforms to establish exact dynamic models. In this situation, based on a great number of experimental and field data, to explore data-based dynamic models and to develop effective data-based control schemes for offshore platforms are of significance both in theory and in real implementations, which is well worth investigation in the near future;
-
Offshore platforms are inevitably affected by ocean waves, ice, winds, flow, even earthquakes. The external loading generally results in random features of dynamics of offshore platforms. Applying stochastic control theory to active control of offshore platform is a natural and feasible way [74]. However, few results about stochastic control for offshore platforms are by far available in the literature. Therefore, some issues including system modeling, filtering, and controller design in the stochastic control theory framework deserve further exploration;
-
To prevent fatigue damage of offshore platforms and to protect operation and staff on offshore platforms subject to a wide range of environmental loading, it is very important for offshore platforms to improve the ability to detect, diagnosis and tolerant malfunctions of the control system. To develop reliable fault diagnosis and fault-tolerant controllers to cope with potential failures in actuators and sensors is a significant issue; and
-
Vibration control of offshore platforms lies at an intersection of different research areas including structure vibration theory, control theory, communication theory, civil engineering, mechanical engineering, and ocean engineering. Consequently, collaborative research in vibration control of offshore platforms is required from different engineering and scientific fields.
-
Compared with passive and semi-active control, active control has several advantages. However, if power supply cannot be guaranteed during the harsh ocean environment, the active controller will not work [4]. In this situation, semi-active and hybrid control mechanisms with passive components are still feasible options for the vibration control of the offshore platforms. Therefore, to develop semi-active and hybrid control mechanisms with high reliability, desirable control effects and low control cost require further study.
6 Conclusion
We have provided an overview of recent advances in vibration control of offshore platforms. We have briefly reviewed some results on passive control and semi-active control of offshore platforms. We have paid attention to active control of offshore platforms. In particular, we have analyzed and discussed in detail results on delayed feedback control, sliding model control, sampled-data control, and network-based control of offshore platforms. We have also provided some challenging issues to be addressed in the future research.
References
Wilson, J.F.: Dynamics of Offshore Structures. Wiley, Chichester (2002)
Hirdaris, S.E., Bai, W., Dessi, D., Ergin, A., Gu, X., Hermundstad, O.A., Huijsmans, R., Iijima, K., Nielsen, U.D., Parunov, J., Fonseca, N., Papanikolaou, A., Argyriadis, K., Incecik, A.: Loads for use in the design of ships and offshore structures. Ocean Eng. 78, 131–174 (2014)
Ou, J., Long, X., Li, Q.S., Xiao, Y.Q.: Vibration control of steel jacket offshore platform structures with damping isolation systems. Eng. Struct. 29(7), 1525–1538 (2007)
Kandasamy, R., Cui, F., Townsend, N., Foo, C.C., Guo, J., Shenoi, A., Xiong, Y.: A review of vibration control methods for marine offshore structures. Ocean Eng. 127, 279–297 (2016)
Soong, T.T., Dargush, G.F.: Passive Energy Dissipation Systems in Structural Engineering. Wiley, Buffalo (1997)
Yao, J.T.P.: Concept of structural control. J. Struct. Div. 98(7), 1567–1574 (1972)
Korkmaz, S.: A review of active structural control: challenges for engineering informatics. Comput. Struct. 89(23–24), 2113–2132 (2011)
Lee, H.H.: Stochastic analysis for offshore structures with added mechanical dampers. Ocean Eng. 24(5), 817–834 (1997)
Li, H., Wang, S., Ji, C.: Semi-active control of wave-induced vibration for offshore platforms by use of MR damper. China Ocean Eng. 16(1), 33–40 (2002)
Abdel-Rohman, M.: Structural control of a steel jacket platform. Struct. Eng. Mech. 4(2), 125–138 (1996)
Li, H.-N., He, X.-Y., Huo, L.-S.: Seismic response control of offshore platform structures with shape memory alloy dampers. China Ocean Eng. 19(2), 185–194 (2005)
Patil, K.C., Jangid, R.S.: Passive control of offshore jacket platforms. Ocean Eng. 32, 1933–1949 (2005)
Golafshani, A.A., Gholizad, A.: Friction damper for vibration control in offshore steel jacket platforms. J. Constr. Steel Res. 65(1), 180–187 (2009)
Moharrami, M., Tootkaboni, M.: Reducing response of offshore platforms to wave loads using hydrodynamic buoyant mass dampers. Eng. Struct. 81, 162–174 (2014)
Monir, H.S., Nomani, H.: Application of lead rubber isolation systems in the offshore structures. In: Proceedings of the international multi conference of engineers and computer scientists (IMECS), Hong Kong, pp. 1523–1527 (2011)
Liu, X., Li, G., Yue, Q., Oberlies, R.: Acceleration-oriented design optimization of ice-resistant jacket platforms in the Bohai Gulf. Ocean Eng. 36(17–18), 1295–1302 (2009)
Xu, Y., Liu, Y., Kan, C., Shen, Z., Shi, Z.: Experimental research on fatigue property of steel rubber vibration isolator for offshore jacket platform in cold environment. Ocean Eng. 36(8), 588–594 (2009)
Wang, S., Yue, Q., Zhang, D.: Ice-induced non-structure vibration reduction of jacket platforms with isolation cone system. Ocean Eng. 70(15), 118–123 (2013)
Kareem, A.: Mitigation of wind induced motion of tall buildings. J. Wind Eng. Ind. Aerodyn. 11(1–3), 273–284 (1983)
Alves, R.M., Batista, R.C.: Active/passive control of heave motion for TLP type of offshore platforms. In: International Offshore and Polar Engineering Conference (ISOPE), Brest, France, pp. 332–338 (1999)
Wang, S., Li, H., Ji, C., Jiao, G.: Energy analysis for TMD-structure systems subjected to impact loading. China Ocean Eng. 16(3), 301–310 (2002)
Chandrasekaran, S., Bhaskar K., Lino, H., Brijith, R.: Dynamic response behaviour of multi-legged articulated tower with & without TMD. In: Proceedings of International Conference Marine Technology, Dhaka, Bangladesh, pp. 131–136 (2010)
Yue, Q., Zhang, L., Zhang, W., Kärnä, T.: Mitigating ice-induced jacket platform vibrations utilizing a TMD system. Cold Reg. Sci. Technol. 56(2–3), 84–89 (2009)
Abe, M., Igusa, T.: Tuned mass dampers for structures with closely spaced natural frequencies. Earthq. Eng. Struct. Dyn. 24, 247–261 (1995)
Taflanidis, A.A., Angelides, D.C., Scruggs, J.T.: Robust design optimization of mass dampers for control of tension leg platforms. In: Proceedings of International Offshore and Polar Engineering Conference (ISOPE), Vancouver, Canada, pp. 92–99 (2008)
Lu, J., Mei, N., Li, Y., Shi, X.: Vibration control of multi-tuned mass dampers for an offshore oil platfrom. China Ocean Eng. 16(3), 321–328 (2002)
Taflanidis, A.A., Angelides, D.C., Scruggs, J.T.: Simulation-based robust design of mass dampers for response mitigation of tension leg platforms. Eng. Struct. 31(4), 847–857 (2009)
Chandrasekaran, S., Kumar, D., Ramanathan, R.: Dynamic response of tension leg platform with tuned mass dampers. J. Naval Archit. Mar. Eng. 10(2), 1813–8235 (2013)
Ma, R., Wang, J., Zhao, D.: Simulation of vibration control of offshore platforms under earthquake loadings. In: Proceedings of ASME International Conference on Offshore Mechanics and Arctic Engineering (OMAE), Estoril, Portugal, pp. 1–5 (2008)
Zhao, D., Cai, D.M., Ma, R.J.: Vibration control of offshore platforms using METMD system under the random ocean wave forces. In: Proceedings of International Society of Offshore and Polar Engineers (ISOPE) Pacific/Asia Mechanics Symposium. Dalian, China, pp. 60–65 (2006)
Golafshani, A.A., Gholizad, A.: Passive devices for wave induced vibration control in offshore steel jacket platforms. Trans. A Civil Eng. 16(6), 443–456 (2009)
Jafarabad, A., Kashani, M., Parvar, M.R.A., Golafshani, A.A.: Hybrid damping systems in offshore jacket platforms with float-over deck. J. Constr. Steel Res. 98, 178–187 (2014)
Ma, R., Zhang, H., Zhao, D.: Study on the anti-vibration devices for a model jacket platform. Mar. Struct. 23(4), 434–443 (2010)
Veḷičko, J., Gaile L.: Overview of tuned liquid dampers and possible ways of oscillation damping properties improvement. In: Proceedings of 10th International Scientific and Practical Conference, Rezekne, Latvia, pp. 233–238 (2015)
Vandiver, J.K., Mitome, S.: Effect of liquid storage tanks on the dynamic response of offshore platforms. Appl. Ocean Res. 1(2), 67–74 (1979)
Li, H., Ma, B.: Seismic response reduction for fixed offshore platform by tuned liquid damper. China Ocean Eng. 11(2), 119–125 (1997)
Chen, X., Wang, L., Xu, J.: TLD technique for reducing ice-induced vibration on platforms. J. Cold Reg. Eng. 13(3), 139–152 (1999)
Jin, Q., Li, X., Sun, N., Zhou, J., Guan, J.: Experimental and numerical study on tuned liquid dampers for controlling earthquake response of jacket offshore platform. Mar. Struct. 20(4), 238–254 (2007)
Spillane, M.W., Rijken, O.R., Leverette S.J.: Vibration absorbers for deep water TLP’s. In: Proc. 16th International Offshore and Polar Engineering Conference (ISOPE), Lisbon, Portugal, pp. 210–217 (2007)
Bian, X.S., Leverette, S.J., Rijken, O.R.: A TLP solution for 8000 ft water depth. In: Proceedings of ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, pp. 255–262 (2010)
Rijken, O., Spillane, M., Leverette, S.J.: Vibration absorber technology and conceptual design of vibration absorber for TLP in ultradeep water. In: ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, pp. 629–638 (2010)
Sakai, F., Takaeda, S., Tamaki, T.: Tuned liquid column damper-new type device for suppression of building vibrations. In: Proceedings of International Conference on Highrise Buildings, Nanjing, China, pp. 926–931 (1989)
Chaiviriyawong, P., Webster, W.C., Pinkaew, T., Lukkunaprasit, P.: Simulation of characteristics of tuned liquid column damper using a potential-flow method. Eng. Struct. 29(1), 132–144 (2007)
Lee, H.H., Wong, S.-H., Lee, R.-S.: Response mitigation on the offshore floating platform system with tuned liquid column damper. Ocean Eng. 33(8–9), 1118–1142 (2006)
Huo, L., Li, H.: Torsionally coupled response control of offshore platform structures using CTLCD. In: Proceedings of 15th International Offshore and Polar Engineering Conference (ISOPE), Seoul, Korea, pp. 296–303 (2005)
Al-Saif, K.A., Aldakkan, K.A., Foda, M.A.: Modified liquid column damper for vibration control of structures. Int. J. Mech. Sci. 53(7), 505–512 (2011)
Chatterjee, T., Chakraborty, S.: Vibration mitigation of structures subjected to random wave forces by liquid column dampers. Ocean Eng. 87(1), 151–161 (2014)
Lee, H.H., Juang, H.H.: Experimental study on the vibration mitigation of offshore tension leg platform system with UWTLCD. Smart Struct. Syst. 9(1), 71–104 (2012)
Mousavi, S.A., Zahrai, S.M., Bargi, K.: Optimum geometry of tuned liquid column-gas damper for control of offshore jacket platform vibrations under seismic excitation. Earthq. Eng. Eng. Vib. 11(4), 579–592 (2012)
Mousavi, S.A., Bargi, K., Zahrai, S.M.: Optimum parameters of tuned liquid column-gas damper for mitigation of seismic-induced vibrations of offshore jacket platforms. Struct. Control Health Monit. 20(3), 422–444 (2013)
Hochrainer, M.J., Ziegler, F.: Control of tall building vibrations by sealed tuned liquid column dampers. Struct. Control Health Monit. 13(6), 980–1002 (2006)
Ziegler, F.: Special design of tuned liquid column-gas dampers for the control of spatial structural vibrations. Acta Mech. 201(1), 249–267 (2008)
Zeng, X., Yu, Y., Zhang, L., Liu, Q., Wu, H.: A new energy-absorbing device for motion suppression in deep-sea floating platforms. Engergies 8(1), 111–132 (2015)
Pinkaew, T., Fujino, Y.: Effectiveness of semi-active tuned mass dampers under harmonic excitation. Eng. Struct. 23(7), 850–856 (2001)
Spencer Jr., B.F., Dyke, S.J., Sain, M.K., Carlson, J.D.: Phenomenological model of a magnetorheological damper. J. Eng. Mech. 123(3), 230–238 (1997)
Lamont, L., Chaar, L., Karkoub, M.: Design of a test rig for vibration control of oil platforms using Magnetorheological Dampers. In: Proceedings of 2nd International Energy 2030 Conference, Dhabi, UAE, pp. 291–301 (2008)
Sarrafan, A., Zareh, S.H., Khayyat, A.A., Zabihollah, A.: Performance of an offshore platform with MR dampers subjected to wave. In: Proceedings of IEEE International Conference on Mechatronics (ICM), Istanbul, Turkey, pp. 242–247 (2011)
Ji, C., Yin, Q.: Study on a fuzzy MR damper vibration control strategy for offshore platforms. In: Proc. ASME 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, USA, pp. 363–368 (2007)
Ji, C., Chen, M., Li, S.: Vibration control of jacekt platforms with magnetorheological damper and experimental validation. High Technol. Lett. 16(2), 189–193 (2010)
Wu, B., Shi, P., Wang, Q., Guan, X., Ou, J.: Performance of an offshore platform with MR dampers subjected to ice and earthquake. Struct. Control Health Monit. 18(6), 682–697 (2011)
Wang, S.-Q., Li, N.: Semi-active vibration control for offshore platforms based on LQG method. J. Mar. Sci. Technol. 21(5), 562–568 (2013)
Sarrafan, A., Zareh, S.H., Khayyat, A.A.A., Zabihollah, A.: Neuro-fuzzy control strategy for an offshore steel jacket platform subjected to wave-induced forces using magnetorheological dampers. J. Mech. Sci. Technol. 26(4), 1179–1196 (2012)
Taghikhany, T., Ariana, Sh, Mohammadzadeh, R., Babaei, S.: The effect of semi-active controller in Sirri jacket seismic vibration control under Kobe earthquake. Int. J. Mar. Sci. Eng. 3(2), 77–84 (2013)
Fischer, F.J., Liapis, S.I., Kallinderis, Y.: Mitigation of current-driven, vortex-induced vibrations of a spar platform via “SMART” thrusters. J. Offshore Mech. Arct. Eng. 126(1), 96–104 (2004)
Zribi, M., Almutairi, N., Abdel-Rohman, M., Terro, M.: Nonlinear and robust control schemes for offshore steel jacket platforms. Nonlinear Dyn. 35(1), 61–80 (2004)
Zhang, B.-L., Hu, Y.-H., Tang, G.-Y.: Stabilization control for offshore steel jacket platforms with actuator time-delays. Nonlinear Dyn. 70(2), 1593–1603 (2012)
Suhardjo, J., Kareem, A.: Structural control of offshore platforms. In: Proceedings of 7th International Offshore and Polar Engineering Conference (ISOPE), Honolulu, USA, pp. 416–424 (1997)
Nakamura, M., Kajiwara, H., Koterayama, W., Hyakudome, T.: Control system design and model experiments on thruster assisted mooring system. In: Proceedings of 7th International Offshore and Polar Engineering Conference (ISOPE), Honolulu, USA, pp. 641–648 (1997)
Yamamoto, I., Matsuura, M., Yamaguchi, Y., Shimazaki, K., Tanabe, A.: Dynamic positioning system based on nonlinear programming for offshore platforms. In: Proceedings of 7th International Offshore and Polar Engineering Conference (ISOPE), Honolulu, USA, pp. 632–640 (1997)
Suhardjo, J., Kareem, A.: Feedback-feedforward control of offshore platforms under random waves. Earthq. Eng. Struct. Dyn. 30, 213–235 (2001)
Kawano, K.: Active control effects on dynamic response of offshore structures. In: Proceedings of 3rd International Offshore and Polar Engineering Conference (ISOPE), Singapore, pp. 494–498 (1993)
Terro, M.J., Mahmoud, M.S., Abdel-Rohman, M.: Multi-loop feedback control of offshore steel jacket platforms. Comput. Struct. 70(2), 185–202 (1999)
Mahadik, A.S., Jangid, R.S.: Active control of offshore jacket platforms. Int. Shipbuild. Prog. 50(4), 277–295 (2003)
Luo, M., Zhu, W.Q.: Nonlinear stochastic optimal control of offshore platforms under wave loading. J. Sound Vib. 296(4–5), 734–745 (2006)
Suneja, B.P., Datta, T.K.: Active control of ALP with improved performance function. Ocean Eng. 25(10), 817–835 (1998)
Yoshida, K., Suzuki, H., Nam, D.: Active control of coupled dynamic response of TLP hull and tendon. In: Proceedings of 4th International Offshore and Polar Engineering Conference (ISOPE), Osaka, Japan, pp. 98–104 (1994)
Ahmad, S.K., Ahmad, S.: Active control of non-linearly coupled TLP response under wind and wave environments. Comput. Struct. 72(6), 735–747 (1999)
Alves, R.M., Battista, R.C., Albrecht, C.H.: Active control for enhancing fatigue life of TLP platform and tethers. In: Proceedings of 17th International Congress Mechanics Engineering, Sao Paulo, Brazil (2003)
Zhang, W.-S., Li, D.-D.: Active control of axial dynamic response of deepwater risers with linear quadratic Gaussian controllers. Ocean Eng. 109, 320–329 (2015)
Li, H.-J., Hu, S.-L., Jakubiak, C.: \(H_2\) active vibration control for offshore platform subjected to wave loading. J. Sound Vib. 263(4), 709–724 (2003)
Wang, W., Tang, G.-Y.: Feedback and feedforward optimal control for offshore jacket platforms. China Ocean Eng. 18(4), 515–526 (2004)
Ma, H., Tang, G.-Y., Zhao, Y.-D.: Feedforward and feedback optimal control for offshore structures subjected to irregular wave forces. Ocean Eng. 33(8–9), 1105–1117 (2006)
Ma, H., Tang, G.-Y., Hu, W.: Feedforward and feedback optimal control with memory for offshore platforms under irregular wave forces. J. Sound Vib. 328(4–5), 369–381 (2009)
Zhang, B.-L., Liu, Y.-J., Han, Q.-L., Tang, G.-Y.: Optimal tracking control with feedforward compensation for offshore steel jacket platforms with active mass damper mechanisms. J. Vib. Control 22(3), 695–709 (2016)
Zhang, B.-L., Liu, Y.-J., Ma, H., Tang, G.-Y.: Discrete feedforward and feedback optimal tracking control for offshore steel jacket platforms. Ocean Eng. 91, 371–378 (2014)
Zhang, B.-L., Feng, A.-M., Li, J.: Observer-based optimal fault-tolerant control for offshore platforms. Comput. Electr. Eng. 40(7), 2204–2215 (2014)
Li, H., Hu, S.-L.J.: Optimal active control of wave-induced vibration for offshore platform. China Ocean Eng. 15(1), 1–14 (2001)
Ji, C., Li, H., Wang, S.: Optimal vibration control strategy for offshore platforms. In: Proceedings of International Offshore Polar Engineering Conference (ISOPE), Kitakyushu, Japan, pp. 91–96 (2002)
Yang, J.S.: Robust mixed \(H_2/H_\infty \) active control for offshore steel jacket platform. Nonlinear Dyn. 78(2), 1503–1514 (2014)
Zhang, B.-L., Tang, G.-Y.: Active vibration \(H_\infty \) control of offshore steel jacket platforms using delayed feedback. J. Sound Vib. 332(22), 5662–5677 (2013)
Zhang, B.-L., Ma, L., Han, Q.-L.: Sliding mode control for offshore steel jacket platforms subject to nonlinear self-excited wave force and external disturbance. Nonlinear Anal. Real World Appl. 14(1), 163–178 (2013)
Zhang, B.-L., Huang, Z.-W., Han, Q.-L.: Delayed non-fragile \(H_\infty \) control for offshore steel jacket platforms. J. Vib. Control 21(5), 959–974 (2015)
Zhou, Y.-J., Zhao, D.-Y.: Neural network-based active control for offshore platforms. China Ocean Eng. 17(3), 461–468 (2003)
Chang, S., Kim, D., Chang, C., Cho, S.G.: Active response control of an offshore structure under wave loads using a modified probabilistic neural network. J. Mar. Sci. Technol. 14(2), 240–247 (2009)
Kim, D.H.: Neuro-control of fixed offshore structures under earthquake. Eng. Struct. 31(2), 517–522 (2009)
Kim, D.H.: Application of lattice probabilistic neural network for active response control of offshore structures. Struct. Eng. Mech. 31(2), 153–162 (2009)
Cui, H., Hong, M.: Adaptive inverse control of offshore jacket platform based on grey prediction. In: Proceedings of 2nd International Conference on Digital Manufacturing and Automation, Zhangjiajie, China, pp. 150–154 (2011)
Li, X., Yu, X., Han, Q.-L.: Stability analysis of second-order sliding mode control systems with input-delay using Poincare map. IEEE Trans. Autom. Control 58(9), 2410–2415 (2013)
Zhang, B.-L., Tang, G.-Y., Ma, H.: Optimal sliding mode control with specified decay rate for offshore steel jacket platforms. China Ocean Eng. 24(3), 443–452 (2010)
Zhang, B.-L., Han, Q.-L., Zhang, X.-M., Yu, X.: Integral sliding mode control for offshore steel jacket platforms. J. Sound Vib. 331(14), 3271–3285 (2012)
Zhang, X.-M., Han, Q.-L., Han, D.-S.: Effects of small time-delays on dynamic output feedback control of offshore steel jacket structures. J. Sound Vib. 330(16), 3883–3900 (2011)
Zhang, B.-L., Han, Q.-L., Zhang, X.-M., Yu, X.: Sliding mode control with mixed current and delayed states for offshore steel jacket platforms. IEEE Trans. Control Syst. Technol. 22(5), 1769–1783 (2014)
Nourisola, H., Ahmadi, B.: Robust adaptive sliding mode control based on wavelet kernel principal component for offshore steel jacket platforms subject to nonlinear wave-induced force. J. Vib. Control (2014). doi:10.1177/1077546314553319
Nourisola, H., Ahmadi, B., Tavakoli, S.: Delayed adaptive output feedback sliding mode control for offshore platforms subject to nonlinear wave-induced force. Ocean Eng. 104, 1–9 (2015)
Sakthivel, R., Santra, S., Kaviarasan, B., Park, J.H.: Finite-time sampled-data control of permanent magnet synchronous motor systems. Nonlinear Dyn. 86(3), 2081–2092 (2016)
Santra, S., Sakthivel, R., Kaviarasan, B.: Dissipativity-based reliable sampled-data control with nonlinear actuator faults. J. Comput. Nonlinear Dyn. 11(6), 061006 (2016)
Sakthivel, R., Selvaraj, P., Mathiyalagan, K., Park, J.H.: Robust fault-tolerant \(H_\infty \) control for offshore steel jacket platforms via sampled-data approach. J. Frankl. Inst. 352(6), 2259–2279 (2015)
Sakthivel, R., Santra, S., Mathiyalagan, K., Anthoni, S.M.: Robust reliable sampled-data control for offshore steel jacket platforms with nonlinear perturbations. Nonlinear Dyn. 78(2), 1109–1123 (2014)
Sivaranjani, K., Rakkiyappan, R., Lakshmanan, S., Lim, C.P.: Robust stochastic sampled-data control for offshore steel jacket platforms with non-linear perturbations. IMA J. Math. Control Inf. (2015). doi:10.1093/imamci/dnv046
Zhang, B.-L., Meng, M.-M., Han, Q.-L., Zhang, X.-M.: Robust non-fragile sampled-data control for offshore steel jacket platforms. Nonlinear Dyn. 83(4), 1939–1954 (2016)
Robinett, R.D., Petterson, B.J., Fahrenholtz, J.C.: Lag-stabilized force feedback damping. J. Intell. Robot. Syst. 21(3), 277–285 (1998)
Zhao, Y.-Y., Xu, J.: Effects of delayed feedback control on nonlinear vibration absorber system. J. Sound Vib. 308(1–2), 212–230 (2007)
Zhang, D., Han, Q.-L., Jia, X.-C.: Network-based output tracking control for a class of T-S fuzzy systems that can not be stabilized by non-delayed output feedback controllers. IEEE Trans. Cybern. 45(8), 1511–1524 (2015)
Zhu, S., Han, Q.-L., Zhang, C.: Investigating the effects of time-delays on stochastic stability and designing \(l_{1}\)-gain controllers for positive discrete-time Markov jump linear systems with time-delay. Inf. Sci. 355–356, 265–281 (2016)
Zhang, B.-L., Han, Q.-L.: Robust sliding mode \(H_\infty \) control using time-varying delayed states for offshore steel jacket platforms. In: Proceedings of IEEE International Symposium on Industrial Electronics (ISIE), Taipei, Taiwan, pp. 1–6 (2013)
Zhang, B.-L., Han, Q.-L., Huang, Z.-W.: Pure delayed non-fragile control for offshore steel jacket platforms subject to non-linear self-excited wave force. Nonlinear Dyn. 77(3), 491–502 (2014)
Peng, C., Han, Q.-L., Yue, D.: To transmit or not to transmit: a discrete event-triggered communication scheme for networked Takagi–Sugeno fuzzy systems. IEEE Trans. Fuzzy Syst. 21(1), 164–170 (2013)
Zhang, X.-M., Han, Q.-L.: Event-triggered dynamic output feedback control for networked control systems. IET Control Theory Appl. 8, 226–234 (2014)
Zhang, X.-M., Han, Q.-L.: Event-based \(H_\infty \) filtering for sampled-data systems. Automatica 51, 55–69 (2015)
Ge, X., Yang, F., Han, Q.-L.: Distributed networked control systems: a brief overview. Inf. Sci. 380, 117–131 (2017)
Zhang, X.-M., Han, Q.-L., Yu, X.: Survey on recent advances in networked control systems. IEEE Trans. Ind. Inf. 12(5), 1740–1752 (2016)
Zhang, X.-M., Han, Q.-L., Zhang, B.-L.: An overview and deep investigation on sampled-data-based event-triggered control and filtering for networked systems. IEEE Trans. Ind. Inf. 13(1), 4–16 (2017)
Santra, S., Sakthivel, R., Shi, Y., Mathiyalagan, K.: Dissipative sampled-data controller design for singular networked cascade control systems. J. Frankl. Inst. 353(14), 3386–3406 (2016)
Zhang, B.-L., Han, Q.-L.: Network-based modelling and active control for offshore steel jacket platforms with TMD mechanisms. J. Sound Vib. 333(25), 6796–6814 (2014)
Jiang, X., Han, Q.-L.: On \(H_\infty \) control for linear systems with interval time-varying delay. Automatica 41(12), 2099–2106 (2005)
Jiang, X., Han, Q.-L.: Delay-dependent robust stability for uncertain linear systems with interval time-varying delay. Automatica 42(6), 1059–1065 (2006)
Zhang, B.-L., Han, Q.-L., Zhang, X.-M.: Event-triggered \(H_\infty \) reliable control for offshore structures in network environments. J. Sound Vib. 368, 1–21 (2016)
Yue, D., Tian, E., Han, Q.-L.: A delay system method for designing event-triggered controllers of networked control systems. IEEE Trans. Autom. Control 58(2), 475–481 (2013)
Peng, C., Han, Q.-L.: A novel event-triggered transmission scheme and \(L_2\) control co-design for sampled-data control systems. IEEE Trans. Autom. Control 58(10), 2620–2626 (2013)
Zhang, X.-M., Han, Q.-L.: A decentralized event-triggered dissipative control scheme for systems with multiple sensors to sample the system outputs. IEEE Trans. Cybern. 46(12), 2745–2757 (2016)
Wang, Y.-L., Han, Q.-L.: Network-based fault detection filter and controller coordinated design for unmanned surface vehicles in network environments. IEEE Trans. Ind. Inf. 12(5), 1753–1765 (2016)
Acknowledgements
This work was supported by the Natural Science Foundation of China under Grant 61379029, the State Foundation for Studying Abroad under Grant 20130833-0318, the Australian Research Council Discovery Project under Grants DP1096780 and DP160103567, and the Griffith University 2016 New Researcher Grant Scheme under Project No. 219128.
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Zhang, BL., Han, QL. & Zhang, XM. Recent advances in vibration control of offshore platforms. Nonlinear Dyn 89, 755–771 (2017). https://doi.org/10.1007/s11071-017-3503-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3503-4