
Abstract
The spatial, temporal, and spatiotemporal dynamics of a reaction–diffusion predator–prey system with ratio-dependent Holling type III functional response, under homogeneous Neumann boundary conditions, are studied in this paper. Preliminary analysis on the local asymptotic stability and Hopf bifurcation of the spatially homogeneous model based on ordinary differential equation is presented. For the reaction–diffusion model, firstly the parameter regions for the stability or instability of the unique constant steady state are discussed. Then it is shown that Turing (diffusion-driven) instability occurs, which induces spatial inhomogeneous patterns. Next, it is proved that the model exhibits Hopf bifurcation, which produces temporal inhomogeneous patterns. Finally, the existence and nonexistence of nonconstant steady- state solutions are established by bifurcation method and energy method, respectively. Numerical simulations are presented to verify and illustrate the theoretical results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Pattern formation is an important research aspect of modern science and technology. It can be used to describe the structure changes of interacting species or reactants of ecology, chemical reaction, and gene formation in nature. Spatial, temporal, and spatiotemporal patterns could occur in the reaction–diffusion models via Turing instability, Hopf bifurcation, and nonconstant positive solutions.
Turing instability is an important way to study spatial inhomogeneous patterns. In the early 1950s, the British mathematician Alan M. Turing [42] proposed a model that accounts for pattern formation in morphogenesis. Turing showed mathematically that a system of coupled reaction–diffusion equations could give rise to spatial concentration patterns of a fixed characteristic length from an arbitrary initial configuration due to so-called diffusion-driven instability, that is, diffusion could destabilize an otherwise stable equilibrium of the reaction–diffusion system and lead to nonuniform spatial patterns. Turing’s analysis stimulated considerable theoretical research on mathematical models of pattern formation, and a great deal of research have been devoted to the study of Turing instability in chemical and biology contexts (see [4, 10, 17, 43, 57] for Brusselator model; [6, 12, 24, 48] for Gray–Scott model; [15, 16, 27, 53, 55] for Lengyel–Epstein model; [32, 52, 56] for Oregonator model, [14, 36, 47, 49] for Schnakenberg model, [5, 29, 33, 45] for Sel’klov model, [18, 19, 23, 37, 51] for predator–prey model).
Hopf bifurcation is used to study the temporal periodic patterns. In [54], the authors gave a detailed Hopf bifurcation analysis for both the ODE and PDE models, deriving a formula for determining the direction of the Hopf bifurcation and the stability of the bifurcating spatially homogeneous periodic solutions (see also [1, 11, 21, 34, 35, 41, 46] for the studies of Hopf bifurcation in diffusive predator–prey models).
In spatially inhomogeneous case, the existence of a nonconstant time-independent positive solution, also called stationary patterns, is an indication of the richness of the corresponding partial differential equation dynamics. In recent years, stationary patterns induced by diffusion have been studied extensively, and many important phenomena have been observed (see [3, 7, 8, 20, 22, 26, 30] and references therein).
In this paper, we investigate the spatial, temporal, and spatiotemporal patterns of the following diffusive predator–prey model with ratio-dependent Holling type III functional response

To study the stationary patterns, we also consider the steady-state equations associated with (1):
Here, u and v stand for the densities of the prey and predator; \({\varOmega }\) is a bounded domain of \(\mathbf {R}^N\), with smooth boundary \(\partial {\varOmega }, {\varDelta }\) is the Laplace operator with respect to the spatial variable \(x=(x_1,\ldots ,x_N), \nu \) is the unit outward normal on \(\partial {\varOmega }\). The homogeneous Neumann boundary conditions indicate that the predator–prey system is self-contained with zero population flux across the boundary. The positive constants \(d_1\) and \(d_2\) are diffusion coefficients, and the initial data \(u_0(x)\) and \(v_0(x)\) are nonnegative functions. The parameters \(m,\lambda \) are positive constants and \(0<\alpha <1\). Then it is easy to see that (2) possesses a unique positive constant steady-state solution
Problem (1) was studied in [39] recently, and the uniform persistence of the solution semiflows, the existence of global attractors, local and global stability of the positive constant steady state were derived. On the other hand, the understanding of patterns and mechanisms of spatial dispersal of interacting species is an issue of significant current interest in conservation biology and ecology, and biochemical reactions [2, 9, 25, 28, 38].
The goal of this paper was to give a comprehensive mathematical study of the model (1). In particular, we are interested in the spatiotemporal pattern formation, Turing instability, bifurcation, and the effect of system parameters and diffusion coefficients on the dynamics of the solutions of (1).
The organization of the remaining part of this paper is as follows. In Sect. 2, we investigate the asymptotical behavior of the positive equilibrium \((1-\alpha ,1-\alpha )\) and occurrence of Hopf bifurcation of the local system (4) of (1). In Sect. 3, we firstly consider the asymptotical behavior and Turing instability of the positive equilibrium \((1-\alpha ,1-\alpha )\) for the reaction–diffusion system (1), and then we study the existence of Hopf bifurcation and the stability of the bifurcating periodic solution. In Sect. s4, we consider the existence and nonexistence of positive solutions for problem (2) by bifurcation theory and energy method. Throughout this paper, \(\mathbf {N}\) is the set of natural numbers and \(\mathbf {N}_0=\mathbf {N}\cup \{0\}\). The eigenvalues of the operator \(-{\varDelta }\) with homogeneous Neumann boundary condition in \({\varOmega }\) are denoted by \(0=\mu _0<\mu _1\le \mu _2\le \ldots \le \mu _n\le \ldots \), and the eigenfunction corresponding to \(\mu _n\) is \(\phi _n(x)\).
2 Analysis of the local system
For the diffusive predator–prey model (1), the local system is an ordinary differential equation in the form of
By (3), \((1-\alpha ,1-\alpha )\) is the unique positive equilibrium of (4). We consider the stability of the constant equilibrium \((1-\alpha ,1-\alpha )\) with respect to problem (4) and study the existence of periodic solutions of problem (4) by analyzing the Hopf bifurcations from the constant equilibrium \((1-\alpha ,1-\alpha )\).
2.1 Stability analysis
The Jacobian matrix of system (4) at \((1-\alpha ,1-\alpha )\) is
The characteristic equation of \(L_0(\lambda )\) is
where
Then the equilibrium \((1-\alpha ,1-\alpha )\) is locally asymptotically stable if \(T(\lambda )<0\), and it is unstable if \(T(\lambda )>0\). Thus, we have the following conclusions
Theorem 1
The unique positive equilibrium \((1-\alpha ,1-\alpha )\) of the local system (4) is locally asymptotically stable if \(\alpha \le \frac{m+1}{2}\) or \(\alpha >\frac{m+1}{2}\) and \(\lambda >\frac{2\alpha }{m+1}-1\), and it is unstable if \(\alpha >\frac{m+1}{2}\) and \(\lambda <\frac{2\alpha }{m+1}-1\).
2.2 Hopf bifurcation
In this part, we analyze the Hopf bifurcation occurring at \((1-\alpha ,1-\alpha )\) under the assumption \(\alpha >\frac{m+1}{2}\). Denote
Then \(L_0(\lambda )\) has a pair of purely imaginary eigenvalues \(\xi =\pm \sqrt{\lambda _0(1-\alpha )}\) when \(\lambda =\lambda _0\). Therefore, according to Poincaré–Andronov–Hopf Bifurcation Theorem [50], Theorem3.1.3], system (4) has a small amplitude nonconstant periodic solution bifurcated from the interior equilibrium \((1-\alpha ,1-\alpha )\) when \(\lambda \) crosses through \(\lambda _0\) if the transversal condition is satisfied.
Let \(\xi (\lambda )=\beta (\lambda )\pm i w(\lambda )\) be the roots of (6). Then
Hence, \(\beta (\lambda _0)=0\) and \(\beta '(\lambda _0)=-\frac{1}{2}<0\). This shows that the transversal condition holds. Thus, (4) undergoes a Hopf bifurcation at \((1-\alpha ,1-\alpha )\) as \(\lambda \) passes through the \(\lambda _0\).
However, the detailed property of the Hopf bifurcation needs further analysis of the normal form of the system. To this end, we translate the equilibrium \((1-\alpha ,1-\alpha )\) to the origin by the translation \(\tilde{u}=u-(1-\alpha ), \tilde{v}=v-(1-\alpha )\). For the sake of convenience, we still denote \(\tilde{u}\) and \(\tilde{v}\) by u and v, respectively. Thus, the local system (4) becomes
Rewrite (8) to
where
and

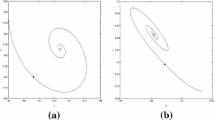
When \(\lambda =0.156>\lambda _0\approx 0.1429\), the solution trajectories spiral toward the positive equilibrium \((0.4,0.4)\) (see left-hand side of the above figure). When \(\lambda =0.14<\lambda _0\approx 0.1429\), there is a limit cycle surrounding the positive equilibrium \((0.4,0.4)\) (see right-hand side of the above figure)
Set the matrix
where
Clearly,
and when \(\lambda =\lambda _0\),
By the transformation \((u,v)^T=P(x,y)^T\), system (8) becomes
where
and
Rewrite (9) in the following polar coordinates form
then the Taylor expansion of (11) at \(\lambda =\lambda _0\) yields
In order to determine the stability of the periodic solution, we need to calculate the sign of the coefficient \(a(\lambda _0)\), which is give by
where
Now from Poincaré-Andronov-Hopf Bifurcation Theorem, \(\beta '(\lambda _0)=-\frac{1}{2}<0\) and the above calculation of \(a(\lambda _0)\), we summarize our results as follows.
Theorem 2
Suppose \(\frac{m+1}{2}<\alpha <1\) and let \(a(\lambda _0)\) be defined as in (13). Then system (4) undergoes a Hopf bifurcation at \((1-\alpha ,1-\alpha )\) when \(\lambda =\lambda _0\). Furthermore,
-
1.
if \(a(\lambda _0)<0\), then the direct of the Hopf bifurcation is subcritical and the bifurcating periodic solutions are orbitally asymptotically stable;
-
2.
if \(a(\lambda _0)>0\), then the direct of the Hopf bifurcation is supercritical and the bifurcating periodic solutions are unstable.
2.3 Numerical simulations
To illustrate Theorem 2, we give some numerical simulations for the following particular case of system (4) with fixed parameters \(\alpha =0.6, m=0.05\).
It is easy to see \(1.05=m+1<1.2=2\alpha \), and system (14) has a unique positive equilibrium \((0.4,0.4)\). Noticing that \(\lambda _0\approx 0.1429\) and \(a(\lambda _0)\approx -0.2907\), it follows from Theorem1 that \((0.4,0.4)\) is locally asymptotically stable when \(\lambda >\lambda _0\approx 0.1429\) and unstable when \(\lambda <\lambda _0\approx 0.1429\). Moreover, when \(\lambda \) passuses through \(\lambda _0\) from the right side of \(\lambda _0, (0.4,0.4)\) will lose its stability and Hopf bifurcation occurs, that is, a family of periodic solutions bifurcate from \((0.4,0.4)\). Since \(a(\lambda _0)\approx -0.2907<0\), it follows from Theorem 2 that the Hopf bifurcation is subcritical and the bifurcating periodic solutions are orbitally asymptotically stable. Numerical simulations are presented in Fig. 1. The left of Fig. 1 shows the stable behavior of the prey and predator when \(\lambda >\lambda _0\). The right of Fig. 1 is the phase portrait of the problem (14), which depicts the limit cycle arising out of Hopf bifurcation around \((0.4,0.4)\).
3 Analysis of the PDE model (1)
In this section, we consider the stability of the constant equilibrium \((1-\alpha ,1-\alpha )\) with respect to problem (1) and study the existence of periodic solutions of problem (1) by analyzing the Hopf bifurcations from the constant equilibrium \((1-\alpha ,1-\alpha )\).
3.1 Stability analysis
The stability of \((1-\alpha ,1-\alpha )\) with respect to (1) is determined by the following eigenvalue problem, which is got by linearizing the system (2) about the constant equilibrium \((1-\alpha ,1-\alpha )\)
Denote
For each \(n\in \mathbf {N}_0\), we define a \(2\times 2\) matrix
The following statements hold true by using Fourier decomposition:
-
1.
If \(\mu \) is an eigenvalue of (15), then there exists \(n\in \mathbf {N}_0\) such that \(\mu \) is an eigenvalue of \(L_n(\lambda )\).
-
2.
The constant equilibrium \((1-\alpha ,1-\alpha )\) is locally asymptotically stable with respect to (1) if and only if for every \(n\in \mathbf {N}_0\), all eigenvalues of \(L_n(\lambda )\) have negative real part.
-
3.
The constant equilibrium \((1-\alpha ,1-\alpha )\) is unstable with respect to (1) if there exists an \(n\in \mathbf {N}_0\) such that \(L_n(\lambda )\) has at least one eigenvalue with positive real part.
The characteristic equation of \(L_n(\lambda )\) is
where
Then \((1-\alpha ,1-\alpha )\) is locally asymptotically stable if \(T_n(\lambda )<0\) and \(D_n(\lambda )>0\) for all \(n\in \mathbf {N}_0\), and \((1-\alpha ,1-\alpha )\) is unstable if there exists \(n\in \mathbf {N}_0\) such that \(T_n(\lambda )>0\) or \(D_n(\lambda )<0\).
Obviously, if \(2\alpha \le m+1\), then \(T_n(\lambda )<0\) and \(D_n(\lambda )>0\) for all \(n\in \mathbf {N}_0\). We get \((1-\alpha ,1-\alpha )\) is locally asymptotically stable.
Next, we consider the case \(\alpha >(m+1)/2\), which implies \(m<1\) since \(\alpha <1\).
We define
and
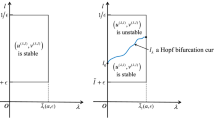
Then \(H\) is the Hopf bifurcation curve, and \(S\) is the steady-state bifurcation curve. Furthermore, the sets \(H\) and \(S\) are graphs of functions defined as follows
where \(\lambda _0\) is defined as in (7), which is positive since \(\alpha >(m+1)/2\).
The following properties of the functions \(\lambda _H(\mu )\) and \(\lambda _S(\mu )\) can be derived by direct calculations.
Lemma 1
Suppose \(1>\alpha >(m+1)/2\). Let \(\lambda _0\) be defined as in (7), and let \(\lambda _H(\mu )\) and \(\lambda _S(\mu )\) be the functions defined as in (20) and (21), respectively. Define
-
1.
The function \(\lambda _H(\mu )\) is strictly decreasing for \(\mu \in (0,\infty )\) such that
$$\begin{aligned}&\lambda _H(0)\!=\!\lambda _0,\ \lambda _H\left( \mu _2^*\right) \!=\!0,\ \lambda _H(\mu )<0\ \mathrm{for}\ \\&\quad \mu >\mu _2^*, \lim _{\mu \rightarrow +\infty }\lambda _H(\mu )=-\infty . \end{aligned}$$ -
2.
\(\mu =\mu _1^*\) is the unique critical value of \(\lambda _S(\mu )\), the function \(\lambda _S(\mu )\) is strictly increasing for \(\mu \in (0,\mu _1^*)\), and \(\lambda _S(\mu )\) is strictly decreasing for \(\mu \in (\mu _1^*,+\infty )\). Furthermore,
$$\begin{aligned}&\lambda _S(0)=\lambda _S\left( \mu _3^*\right) =0,\ \max _{\mu \in [0,+\infty )}\lambda _S(\mu )=\lambda _S^*,\\&\quad \lim _{\mu \rightarrow +\infty }\lambda _S(\mu )=-\infty . \end{aligned}$$ -
3.
\(\lambda _H(\mu )\) and \(\lambda _S^{\mu }\) cross at the point \(\left( \mu ^H,\lambda _H\left( \mu ^H\right) \right) \) and \(\lambda _H(\mu )>\lambda _S(\mu )\) for \(0\le \mu <\mu ^H, \lambda _H(\mu )<\lambda _S(\mu )\) for \(\mu ^H<\mu \le \mu _3^*\).
-
4.
\(\lambda _H^*>\lambda _S^*\) if \(\frac{d_2}{d_1}<1, \lambda _H^*=\lambda _S^*\) if \(\frac{d_2}{d_1}=1\), and \(\lambda _H^*<\lambda _S^*\) if \(\frac{d_2}{d_1}>1\).
-
5.
\(\mu _1^*>\mu _2^*\) if \(\frac{d_2}{d_1}>D_1^*, \mu _1^*=\mu _2^*\) if \(\frac{d_2}{d_1}=D_1^*\), and \(\mu _1^*<\mu _2^*\) if \(\frac{d_2}{d_1}<D_1^*\).
-
6.
\(\lambda _S^*>\lambda _0\) if \(\frac{d_2}{d_1}>D_2^*, \lambda _S^*=\lambda _0\) if \(\frac{d_2}{d_1}=D_2^*\), and \(\lambda _S^*<\lambda _0\) if \(\frac{d_2}{d_1}<D_2^*\). Moreover, if \(\frac{d_2}{d_1}>D_2^*\), then
-
(a)
\(0<\mu ^l<\mu _1^*<\mu ^r\) and \(\lambda _S\left( \mu ^l\right) =\lambda _S\left( \mu ^r\right) =0\);
-
(b)
\(\lambda _S(\mu )>\lambda _0\) for \(\mu \in \left( \mu ^l,\mu ^r\right) \) and \(0<\lambda _S(\mu )<\lambda _0\) for \(\mu \in \left( 0,\mu ^l\right) \cup \left( \mu ^r,\mu _3^*\right) \).
-
(a)
-
7.
Let us view \(D_1^*\) and \(D_2^*\) as functions of \(\alpha \in \left( (m+1)/2,1\right) \). Then \(D_1^*\) is strictly increasing, and \(D_2^*\) is strictly decreasing. Furthermore,
$$\begin{aligned} \begin{aligned}&\lim _{\alpha \rightarrow \frac{m+1}{2}^+}D_1^*=1,\ \lim _{\alpha \rightarrow 1^-}D_1^*=+\infty ,\\&\lim _{\alpha \rightarrow \frac{m+1}{2}^+}D_2^*=+\infty ,\ \lim _{\alpha \rightarrow 1^-}D_1^*=1,\\&D_1^*(\alpha ^*)=D_2^*(\alpha ^*)=\sqrt{2\sqrt{2}+3}. \end{aligned} \end{aligned}$$Moreover, \(D_1^*<D_2^*\) if \(\frac{m+1}{2}<\alpha <\alpha ^*\) and \(D_1^*>D_2^*\) if \(\alpha ^*<\alpha <1\).
Now we can give a stability result regarding the constant equilibrium \((1-\alpha ,1-\alpha )\) by above analysis. We define

The line is the graph of \(\lambda _H(\mu )\). The curves are the graphs of \(\lambda _S(\mu )\). Left is for \(\frac{d_2}{d_1}<D_1^*\), in which (1) is the case of \(\frac{d_2}{d_1}<1\), (2) is the case of \(\frac{d_2}{d_1}=1\), (3) is the case of \(\frac{d_2}{d_1}>1\) and \(\frac{d_2}{d_1}<D_2^*\), (4) is the case of \(\frac{d_2}{d_1}>1\) and \(\frac{d_2}{d_1}=D_2^*\), and (5) is the case of \(\frac{d_2}{d_1}>1\) and \(\frac{d_2}{d_1}>D_2^*\). Middle is for \(\frac{d_2}{d_1}=D_1^*\), in which (1) is the case of \(\frac{d_2}{d_1}<D_2^*\), (2) is the case of \(\frac{d_2}{d_1}=D_2^*\), and (3) is the case of \(\frac{d_2}{d_1}>D_2^*\). Right is for \(\frac{d_2}{d_1}>D_1^*\), in which (1) is the case of \(\frac{d_2}{d_1}<D_2^*\), (2) is the case of \(\frac{d_2}{d_1}=D_2^*\), and (3) is the case of \(\frac{d_2}{d_1}>D_2^*\)
Theorem 3
Let \(\lambda _0, \lambda _S^*, \overline{\lambda }\), and \(D_2^*\) be the constants defined as (7), (31 32), (33), and (29 30), respectively. The constant equilibrium \((1-\alpha ,1-\alpha )\) is locally asymptotically stable with respect to (1) if \(2\alpha \le m+1\); or \(2\alpha >m+1\) and
In particular, (34) holds if
The constant equilibrium \((1-\alpha ,1-\alpha )\) is unstable with respect to (1) if \(\lambda <\max \{\lambda _0,\overline{\lambda }\}\).
Remark 1
In [39], the authors also studied the locally asymptotic stability of \((1-\alpha ,1-\alpha )\) for \(N=1\), i.e., \({\varOmega }=(0,\ell )\) for some constant \(\ell >0\), and they got \((1-\alpha ,1-\alpha )\) is locally asymptotically sable if \(2\alpha \le m+1\). In view of above theorem, we extend their results about two aspects:
-
The condition \(2\alpha \le m+1\) also ensures the locally asymptotic stability of \((1-\alpha ,1-\alpha )\) for general dimensional \(N\ge 1\).
-
The are also some stability results when \(2\alpha >m+1\), which includes the effects of the diffusion coefficients \(d_1\) and \(d_2\).
For global stability results of the constant equilibrium \((1-\alpha ,1-\alpha )\), we refer [39], Theorem2.7].
Next, we derive conditions for the Turing instability with respect to constant equilibrium \((1-\alpha ,1-\alpha )\), which means \((1-\alpha ,1-\alpha )\) is locally asymptotically stable with respect to (4), and it is unstable with respect to (1). In view of Theorem 1, Lemma 1 and Theorem 3, we have
Theorem 4
Let fix \(m\in (0,1)\) and \(\alpha \in \left( \frac{m+1}{2},1\right) \). Then Turing instability happens if
-
(i)
\(\displaystyle \frac{d_2}{d_1}>D_2^*\),
-
(ii)
there exists \(k\in \mathbf {N}\) such that \(\mu _k\in \left( \mu ^l,\mu ^r\right) \), and \(\lambda _0<\lambda <\lambda _S(\mu _k)\),
where \(\lambda _0, \lambda _S(\mu ), \mu ^l, \mu ^r, D_2^*\), and \(\lambda _S^*\) are defined as (7), (21), (26), (27), (29 30), and (31 32), respectively.
3.2 Hopf bifurcations
In this part, we study the existence of periodic solutions of (1) by analyzing the Hopf bifurcations from the positive constant equilibrium \((1-\alpha ,1-\alpha )\) for \(2\alpha >m+1\) since \((1-\alpha ,1-\alpha )\) is locally asymptotic stable when \(2\alpha \le m+1\), and we will show the existence of spatially homogeneous and spatially nonhomogeneous periodic orbits. In this part and Sect. 4.1, we assume that all eigenvalues \(\mu _i\) are simple and denote the corresponding eigenfunction by \(\phi _i(x)\), where \(i\in \mathbf {N}_0\). Note that this assumption always holds when \(N=1\) for \({\varOmega }=(0,\ell \pi )\), as for \(i\in \mathbf {N}_0, \mu _i=i^2/\ell ^2\) and \(\phi _i(x)=\cos (ix/\ell )\), where \(\ell \) is a positive constant, and it also holds for generic class of domain in higher dimensions. We use \(\lambda \) as the main bifurcation parameter. To identify possible Hopf bifurcation value \(\lambda ^H\), we recall the following necessary and sufficient condition from [13, 54].
- \((A_H)\) :
-
There exists \(i\in \mathbf {N}_0\) such that
$$\begin{aligned}&T_i(\lambda ^H)=0,\;D_i(\lambda ^H)>0\;\mathrm{and}\;T_j(\lambda ^H)\not =0,\nonumber \\&\quad D_j(\lambda ^H)\not =0\;\mathrm{for}\;j\in \mathbf {N}_0\setminus \{i\}, \end{aligned}$$(35)where \(T_i(\lambda )\) and \(D_i(\lambda )\) are defined as (18), and for the unique pair of complex eigenvalues \(\alpha (\lambda )\pm i\omega (\lambda )\) near the imaginary axis,
$$\begin{aligned} \alpha '(\lambda ^H)\not =0\;\mathrm{and}\;\omega (\lambda ^H)>0. \end{aligned}$$(36)
For \(i\in \mathbf {N}_0\), we define
where the function \(\lambda _H(\mu )\) is defined as (20). Then \(T_i(\lambda _i^H)=0\) and \(T_j(\lambda _i^H)\not =0\) for \(j\not =i\).
By (35), we need \(D_i(\lambda _i^H)>0\) to make \(\lambda _i^H\) as a possible bifurcation value, which means \(\mu _i<\mu ^H\) by part 3 of Lemma 1, where \(\mu ^H\) is defined as in (25). Let \(n_0\in \mathbf {N}_0\) such that \(\mu _{n_0}<\mu ^H\le \mu _{n_0+1}\), then we can see (35) holds with \(\lambda ^H=\lambda _i^H\) for \(0\le i\le n_0\) (see Fig. 2). Finally, we consider the conditions in (36). Let the eigenvalues close to the pure imaginary one at \(\lambda =\lambda _i^H, 0\le i\le n_0\) be \(\alpha (\lambda )\pm i\omega (\lambda )\). Then
Then all conditions in \((A_H)\) are satisfied if \(0\le i\le n_0\). Now, by using the Hopf bifurcation theorem in [54], we have
Theorem 5
Suppose that \(\alpha , m,d_1,d_2\) are fixed such that \((m+1)/2<\alpha <1\). Let \(\lambda _0, L(\lambda ), D_i(\lambda ), \mu ^H\) be defined as in (7), (16), (19), and (25), respectively. Let \({\varOmega }\) be a smooth domain so that all eigenvalues \(\mu _i, i\in \mathbf {N}_0\) are simple. Then there exists \(n_0\in \mathbf {N}_0\) such that \(\mu _{n_0}<\mu ^H\le \mu _{n_0+1}\), and \(\lambda _i^H\) is a Hopf bifurcation value for \(i\in \{0,\ldots ,n_0\}\). At each \(\lambda _i^H\), the system (1) undergoes a Hopf bifurcation, and the bifurcation periodic orbits near \((\lambda ,u,v)=\left( \lambda _i^H, 1-\alpha , 1-\alpha \right) \) can be parameterized as \((\lambda (s),u(s),v(s))\), so that \(\lambda (s)\in C^\infty \) in the form of \(\lambda (s)=\lambda _i^H+o(s)\) for \(s\in (0,\delta )\) for some small constant \(\delta >0\), and
where \(\omega \left( \lambda _i^H\right) =\sqrt{D_i\left( \lambda _i^H\right) }\) is the corresponding time frequency, \(\phi _i(x)\) is the corresponding spatial eigenfunction, and \((a_i,b_i)\) is the corresponding eigenvector, i.e.,
Moreover,
-
1.
The bifurcation periodic orbits from \(\lambda =\lambda _0^H=\lambda _0\) are spatially homogeneous, which coincide with the periodic orbits of the corresponding local system (4);
-
2.
The bifurcation periodic orbits from \(\lambda _i^H, 1\le i\le n_0\), are spatially nonhomogeneous.
Next, we consider the bifurcation direction (\(\lambda '(0)>0\) or \(\lambda '(0)<0\)) and stability of the bifurcating periodic solutions bifurcating from \(\lambda =\lambda _0\), and we have the following theorem.
Theorem 6
Suppose the assumptions in Theorem 5 hold, and let
Then,
-
1.
if \(\rho (\alpha ,m)<0\), the Hopf bifurcation at \(\lambda =\lambda _0\) is subcritical and the bifurcating periodic solutions are orbitally asymptotical stable;
-
2.
if \(\rho (\alpha ,m)>0\), the Hopf bifurcation at \(\lambda =\lambda _0\) is supercritical and the bifurcating periodic solutions are unstable.
Proof
We use the normal form method and center manifold theorem in [13] to prove this theorem. Let \(L^*(\lambda )\) be the conjugate operator of \(L(\lambda )\) defined as (16):
with domain \(D_{L^*}=D_L=X_C:=X\oplus iX=\{x_1+ix_2:x_1,x_2\in X\}\), where
Let
It is easy to see that
-
1.
\(\langle L^*(\lambda )\xi ,\eta \rangle =\langle \xi ,L(\lambda )\eta \rangle \) for any \(\xi \in D_{L^*}\) and \(\eta \in D_L\),
-
2.
\(L^*(\lambda )q^*=-i\sqrt{\lambda _0(1{\!-}\alpha )}q^*, L(\lambda )q=i\sqrt{\lambda _0(1-\alpha )}q\),
-
3.
\(\langle q^*,q\rangle \)=1, \(\langle q^*,\overline{q}\rangle =0\).
Here \(\langle \xi ,\eta \rangle :=\int _{\varOmega }\overline{\xi }^T\eta dx\) denotes the inner product in \(L^2({\varOmega })\times L^2({\varOmega })\).
According to [13], we decompose \(X=X^C\oplus X^S\) with \(X^C:=\left\{ zq+\overline{z}\overline{q}:z\in \mathbf {C}\right\} \) and \(X^S:=\left\{ \omega \in X:\langle q^*,\omega \rangle =0\right\} \). For any \((u,v)\in X\), there exits \(z\in \mathbf {C}\) and \(\omega =(\omega _1,\omega _2)\) such that
Thus,
Our system in \((z,\omega )\) coordinates becomes
with \(\varphi =(f,g)^T\), where f and g are defined as (9). Straightforward calculations show that
Let \(H=\frac{1}{2}H_{20}z^2+H_{11}z\overline{z}+\frac{1}{2}H_{02}\overline{z}^2+o\left( |z|^2\right) \). It follows [13], Appendix A] that the system (40) possesses a center manifold, and then we can write \(\omega \) in the form \(\omega =\frac{1}{2}\omega _{20}z^2+\omega _{11}z\overline{z}+\frac{1}{2}\omega _{02}\overline{z}^2+o\left( |z|^2\right) \). Thus, we have
Thus, the equation on the center manifold in \(z, \overline{z}\) coordinate now is
where
According to [13],
Then,
Since \(\lambda _0=\frac{2\alpha }{m+1}-1\), we get
where \(\rho (\alpha ,m)\) is defined as (38). \(\square \)
3.3 Numerical simulations
We give some numerical simulations in this part to illustrate the results got in Theorems 3, 4, and 5. We consider the following particular case of system (1) in one-dimensional interval \({\varOmega }=\left( 0,\sqrt{2.5}\pi \right) \) with fixed parameters \(\alpha =0.6\) and \(m=0.05\):

Then \(\mu _n=\frac{n^2}{2.5}, \lambda _0\approx 0.1429, D_2^*\approx 13.1204\), and \(\rho =-13.77\). It is easy to see \(1.05=m+1<1.2=2\alpha \), and system (41) has a unique positive equilibrium \((0.4,0.4)\).

Numerical simulations of the system (41) with \(d_1=0.05, d_2=20\) such that \(\frac{d_2}{d_1}>D_2^*\approx 13.1204\) and \(\lambda =5>\lambda _S^*\approx 4.3566\), the solution converges to the unique positive equilibrium \((0.4,0.4)\)

Numerical simulations of Turing instability of the system (41) with \(d_1=0.05, d_2=20\) such that \(\frac{d_2}{d_1}>D_2^*\approx 13.1204\) and \(\lambda =0.2\) such that \(\lambda _0\approx 0.1429<0.2=\lambda <\lambda _S(\mu _1)=\lambda _S(0.4)\approx 2.341\)

Numerical simulations of the stable periodic solutions for the system (41) with \(d_1=0.05, d_2=20\) such that \(\frac{d_2}{d_1}>D_2^*\approx 13.1204\) and \(\lambda =0.12\) such that \(\lambda =0.12<\lambda _0\approx 0.1429\)

Numerical simulations of the system (41) with \(d_1=d_2=1\) such that \(\frac{d_2}{d_1}<D_2^*\approx 13.1204\) and \(\lambda =0.16>\lambda _0\approx 0.1429\), the solution converges to the unique positive equilibrium \((0.4,0.4)\)

Numerical simulations of the stable periodic solutions for the system (41) with \(d_1=d_2=1\) such that \(\frac{d_2}{d_1}<D_2^*\approx 13.1204\) and \(\lambda =0.13<\lambda _0\approx 0.1429\)
-
1.
Firstly, we choose \(d_1=0.05\) and \(d_2=20\) so that \(\frac{d_2}{d_1}>D_2^*\). Then \(\mu ^l\approx 0.02, \mu ^r\approx 2.8307, \lambda _S(\mu _1)=\lambda _S(0.4)\approx 2.341\), and \(\lambda _S^*\approx 4.3566\) it follows from Theorem 3, (0.4,0.4) is locally asymptotic stable if \(\lambda >\lambda _S^*\) (see Fig. 3), it follows from Theorem 4 that Turing instability happens if \(\lambda _0<\lambda <\lambda _S(\mu _1)\) (see Fig. 4), and it follows from Theorems 5 and 6 that Hopf bifurcation occurs at \(\lambda =\lambda _0\), and the bifurcation periodic solutions exist when \(\lambda <\lambda _0\), and they are orbitally asymptotically stable since \(\rho <0\) (see Fig. 5).
-
2.
Secondly, we choose \(d_1=d_2=1\) so that \(\frac{d_2}{d_1}<D_2^*\). Then it follows from Theorem 4 that no Turing instability happens, it follows from Theorem 3, (0.4,0.4) is locally asymptotic stable if \(\lambda >\lambda _0\) (see Fig. 6), and it follows from Theorems 5 and 6 that Hopf bifurcation occurs at \(\lambda =\lambda _0\), and the bifurcation periodic solutions exist when \(\lambda <\lambda _0\), and they are orbitally asymptotically stable since \(\rho <0\) (see Fig. 7).
4 Analysis of the steady-state model (2)
In this section, we analyze the steady-state model (2) by studying the existence and nonexistence of nonconstant solutions.
4.1 Existence of nonconstant solutions
In this part, we consider the existence of nonconstant solutions for problem (2) by bifurcation theory. The following a priori estimate can be easily established via maximum principle.
Lemma 2
Suppose \(m>0\) and \(0<\alpha <1\) are fixed such that
Then for any \(\lambda >0\), the positive solution \((u,v)\) of problem (2) satisfies
Proof
It follows from the first equation of (2) that \(-d_1{\varDelta } u\le u(1-u)\). Then we get \(u\le 1\) by maximum principle. Similarly, by the second equation of (2), we obtain \(v\le 1\). So the upper bounds follows.
Next, we derive the lower bounds. By the first equation of (2), we have
Then we get \(u\ge 1-\frac{\alpha (m+1)}{2\sqrt{m}}\). The inequality combining with the second equation of (2) implies \(v\ge 1-\frac{\alpha (m+1)}{2\sqrt{m}}\). \(\square \)
As in the previous section, we use \(\lambda \) as the bifurcation parameter to consider the bifurcation solutions. We identify steady- state bifurcation value \(\lambda ^S\) of (2), which satisfies the following steady-state bifurcation conditions [54]:
- \((A_S)\) :
-
There exists \(i\in \mathbf {N}_0\) such that
$$\begin{aligned}&D_i(\lambda ^S)=0,\;T_i(\lambda ^S)\not =0,\;D_j(\lambda ^S)\not =0\;\mathrm{and}\nonumber \\&\quad T_j(\lambda ^S)\not =0,\;\mathrm{for}\;j\in \mathbf {N}_0\setminus \{i\}, \end{aligned}$$(44)and
$$\begin{aligned} D'_i(\lambda ^S)\not =0, \end{aligned}$$(45)where \(T_i(\lambda )\) and \(D_i(\lambda )\) are defined as (18).
Apparently, \(D_0(\lambda )\not =0\); hence, we only consider the case \(i\in \mathbf {N}\). If the following we fix \(\alpha \) and \(m\) to satisfy \((m+1)/2<\alpha <1\), to determine \(\lambda \) values satisfying \((A_S)\), we notice that \(D_i(\lambda )=0\) is equivalent to \(\lambda =\lambda _S(\mu _i)\), where \(\lambda _S(\mu )\) is defined as (21). Then we make the following assumption on the spectral set \(\{\mu _n\}_{n\in \mathbf {N}_0}\) according to Lemma 1:
- \((SP)\) :
-
there exist \(p,q\in \mathbf {N}\) such that \(\mu _{p-1}<\mu ^H<\mu _p\le \mu _q<\mu _3^*\le \mu _{q+1}\), where \(\mu _3^*\) and \(\mu ^H\) are as (24) and (25), respectively.
In the following, we denote
Points \(\lambda _i^S\) are potential steady-state bifurcation points. It follows from Lemma 1 that for each \(i\in \langle p,q\rangle \), there exists only one point \(\lambda _i^S\) such that \(D_i(\lambda _i^S)=0\) and \(T_i(\lambda _i^S)\not =0\). On the other hand, it is possible that for some \(\tilde{\lambda }\in (0,\lambda _S^*)\) with \(\lambda _S^*\) defined as (31 32) such that
- \((SS)\) :
-
\(\lambda _i^S=\lambda _j^S=\tilde{\lambda }\) for some \(i,j\in \langle p,q\rangle \) and \(i\not =j\),
i.e., \(D_i(\tilde{\lambda })=D_j(\tilde{\lambda })\). Then for \(\lambda =\tilde{\lambda }, (A_S)\) is not satisfied, and we shall not consider bifurcations at such a point. On the other hand, it is also possible such that
- \((HS)\) :
-
\(\lambda _i^S=\lambda _j^H\), for some \(i,j\in \langle p,q\rangle \) and \(i\not = j\), where \(\lambda _j^H\) is a Hopf bifurcation point defined as (37).
However, from an argument in [54], for \(\mathbf {N}=1\) and \({\varOmega }=(0,\ell \pi )\), there are only countably many \(\ell \), such that \((SS)\) or \((HS)\) occurs for some \(i\not =j\). For general bounded domains in \(\mathbf {R}^N\), one can also show \((SS)\) or \((HS)\) does not occur for generic domains [44].
According to above analysis, to satisfy the bifurcation condition \((A_S)\), we only need to verify \(D'_i(\lambda _i^S)\not =0\). In fact, since \(\alpha <1\), we obtain

Numerical simulations of the system (41) with \(d_1=0.05, d_2=10\) and \(\lambda =3.5\). The solution converges to a spatially nonhomogeneous steady-state solution
Summarizing the above discussion and using a general bifurcation theorem [54], we obtain the main result of this part on bifurcation of steady-state solutions:
Theorem 7
Suppose that \(\alpha , m,d_1,d_2\) are fixed such that \((m+1)/2<\alpha <1\). Let \((SP)\) holds and let \({\varOmega }\) be a smooth domain so that all eigenvalues \(\mu _i, i\in \mathbf {N}_0\) are simple. Then for any \(i\in \langle p,q\rangle \), which is defined as (46), there exists unique \(\lambda _i^S\in (0,\lambda _S^*]\) with \(\lambda _S^*\) defined as (31 32) and \(\lambda _i^S\) defined as (47) such that \(D_i(\lambda _i^S)=0\) and \(T_i(\lambda _i^S)\not =0\), where \(D_i(\lambda )\) and \(D_i(\lambda )\) are defined as (18). If in addition, we assume (SS) and (HS) hold. The following conclusions are valid.
-
1.
There is a smooth curve \({\varGamma }_i\) of positive solutions of (2) bifurcating from \((\lambda ,u,v)=(\lambda _i^S,1-\alpha ,1-\alpha )\). Near \((\lambda ,u,v)=(\lambda _i^S,1-\alpha ,1-\alpha ), {\varGamma }_i=\{(\lambda _i(s),u_i(s),v_i(s)):s\in (-\epsilon ,\epsilon )\}\), where
$$\begin{aligned} \left\{ \begin{array}{ll} u_i(s)=1-\alpha +sl_i\phi _i(x)+s\psi _{1,i}(s), \\ v_i(s)=1-\alpha +sm_i\phi _i(x)+s\psi _{2,i}(s), \end{array} \right. \end{aligned}$$for some \(C^\infty \) functions \(\lambda _i,\psi _{1,i},\psi _{2,i}\) such that \(\lambda _i(0)=\lambda _i^S\) and \(\psi _{1,i}(0)=\psi _{2,i}(0)=0\). Here \((l_i,m_i)\) satisfies
$$\begin{aligned} L(\lambda _i^S)[(l_i,m_i)^T\phi _i(x)]=(0,0)^T, \end{aligned}$$where \(L(\lambda )\) is defined as (16).
-
2.
In addition, if we assume (42) holds, then \({\varGamma }_i\) contained in a global branch \({\varSigma }_i\) of positive nontrivial solutions of the problem (2), and either \(\overline{{\varSigma }_i}\) contains another \(\left( \lambda _j^S,1-\alpha ,1-\alpha \right) \) or the projection of \(\overline{{\varSigma }_i}\) onto \(\lambda \)-axis contains the interval \(\left( 0,\lambda _i^S\right) \), or the projection of \(\overline{{\varSigma }_i}\) onto \(\lambda \)-axis contains the interval \(\left( \lambda _i^S,\infty \right) \).
Proof
The condition \((A_S)\) has been proved in the previous paragraphs, and the bifurcation of solutions to (2) occurs at \(\lambda =\lambda _i^S\). Note that we assume \((SS)\) and \((HS)\) hold, so \(\lambda =\lambda _i^S\) is always a bifurcation from simple eigenvalue point. By (43), we know that \((u,v)\) has positive upper and lower bounds, which are uniformly in \(\lambda \). From the global bifurcation theorem in [40], \({\varGamma }_i\) contained in a global branch \({\varSigma }_i\) of positive solutions, and either \(\overline{{\varSigma }_i}\) contains another \(\left( \lambda _j^S,1-\alpha ,1-\alpha \right) \) or \(\overline{{\varSigma }_i}\) is not compact. Furthermore, if \(\overline{{\varSigma }_i}\) is not compact, then \(\overline{{\varSigma }_i}\) contains a boundary point \((\tilde{\lambda },\tilde{u},\tilde{v})\), and since \((\tilde{u},\tilde{v})\) satisfies (43), it follows that \(\tilde{\lambda }\) must satisfy \(\tilde{\lambda }=0\) or \(\tilde{\lambda }=\infty \) and the conclusion follows. \(\square \)
4.2 Numerical simulations
We give some numerical simulations in this part to illustrate the results got in Theorem 7. We consider problem (41) with \(d_1=0.05\) and \(d_2=20\) again. Then \(\mu _n=\frac{n^2}{2.5}, \lambda _0\approx 0.1429, \mu ^H\approx 0.053, \mu _3^*\approx 2.8571, \lambda _S^*\approx 4.3566\). It is easy to see \(1.05=m+1<1.2=2\alpha \), and system (41) has a unique positive equilibrium \((0.4,0.4)\). We can find that
This gives possible steady-state bifurcation points \(\lambda _1^S=\lambda _S(\mu _1)\approx 2.3401\) and \(\lambda _2^S=\lambda _S(\mu _2)\approx 4.1905\), while the largest Hopf bifurcation point \(\lambda _0^H=\lambda _0\approx 0.1429\) is much smaller. Hence, for this parameter set \((d_1,d_2)=(0.05,20)\), when \(\lambda \) decreases, the first bifurcation point encountered is \(\lambda _2^S\approx 4.1905\), and a steady-state bifurcation (Turing bifurcation) occurs. A numerical simulation for \(\lambda =3.5\) is shown in Fig. 8, where a nonhomogeneous steady-state solution can be observed for large \(t\).
4.3 Nonexistence of nonconstant solutions
We consider the nonexistence of nonconstant solutions in this part by energy methods, and the main result is the following theorem.
Theorem 8
Suppose \(m>0\) and \(0<\alpha <1\) are fixed such that (42) holds. Let \(\mu _1\) be large enough such that
and
then (2) has no positive nonconstant solution.
Remark 2
It is clear that Theorem 8 holds if \(\mu _1\) is large enough. Note that large \(\mu _1\) is reflected by small “size” of the domain \({\varOmega }\) (here, the “size” should be understood under a rescaling without changing the geometry of \({\varOmega }\). For precise explanation of this, one may refer to [31]). Therefore, the prey \(u\) and the predator \(v\) will be spatially homogeneous distributed when the “size” of \({\varOmega }\) is sufficiently small. On the other hand, we observe that \(\lim _{\alpha \rightarrow 0}{\varPsi }=-\lambda /d\) and \(\lim _{\alpha \rightarrow 0}{\varPhi }=-1\). So Theorem 8 holds for any “size” of the domain \({\varOmega }\) if \(\alpha \) is small enough.
Proof of Theorem 8
In the proof, we denote \(|{\varOmega }|^{-1}\int _{\varOmega }fdx\) by \(\overline{f}\) for \(f\in L^1({\varOmega })\). Let \((u,v)\) be a positive solution of (2), then it is obvious that \(\int _{\varOmega }(u-\overline{u})dx=\int _{\varOmega }(v-\overline{v})dx=0\). Multiplying the first equation of (2) by \(u-\overline{u}\), we obtain
By (43), we get
Similarly, we obtain the following inequality by the second equation of (2) and (43)
Thus, thanks to the well-known Poincaré’s inequality
we find
If \(v\equiv \overline{v}\) on \(\overline{{\varOmega }}\), the second equation of (2) shows \(u\equiv \overline{v}\). We assume that \(v\not \equiv \overline{v}\). Thus, the above inequality direct leads to
which, together with (52), infers
By virtue of (50), (53), and Poincaré’s inequality again, we obtain
where \({\varPhi }\) is defined as (49). Under our hypothesis, (54) deduces \(u\equiv \overline{u}\), which in turn indicates \(v\equiv \overline{v}\). \(\square \)
References
Camara, B.I., Aziz-Alaoui, M.A.: Turing and Hopf patterns formation in a predator–prey model with Leslie–Gower-type functional response. Dynam. Cont. Discrete Ser. B 16, 479–488 (2009)
Cantrell, R.S., Cosner, C.: Spatial Ecology Via Reaction–Diffusion Equations. Wiley, Hoboken (2004)
Casal, A., Eilbeck, J.C., López-Gómez, J., et al.: Existence and uniqueness of coexistence states for a predator–prey model with diffusion. Differ. Integral Equ. 7, 411–439 (1994)
Catllá, A.J., McNamara, A., Topaz, C.M.: Instabilities and patterns in coupled reaction–diffusion layers. Phys. Rev. E 85, 026215 (2012)
Davidson, F.A., Rynne, B.P.: A priori bounds and global existence of solutions of the steady-state Sel’kov model. Proc. R. Soc. Edinb. A 130, 507–516 (2000)
Doelman, A., Kaper, T.J., Zegeling, P.A.: Pattern formation in the one-dimensional Gray–Scott model. Nonlinearity 10, 523–563 (1997)
Du, Y., Lou, Y.: Some uniqueness and exact multiplicity results for a predator–prey model. Trans. Am. Math. Soc. 349, 2443–2475 (1997)
Du, Y., Lou, Y.: S-shaped global bifurcation curve and Hopf bifurcation of positive solutions to a predator–prey model. J. Differ. Equ. 144, 390–440 (1998)
Du, Y., Shi, J.P.: Some recent results on diffusive predator–prey models in spatially heterogeneous environment. Nonlinear Dyn. Evol. Equ. Fields Inst. Commun. 48, 95–135 (2006)
Golovin, A.A., Matkowsky, B.J., Volpert, V.A.: Turing pattern formation in the Brusselator model with superdiffusion. SIAM J. Appl. Math. 69, 251–272 (2008)
Guo, G.H., Li, B.F., Wei, M.H., Wu, J.H.: Hopf bifurcation and steady-state bifurcation for an autocatalysis reaction–diffusion model. J. Math. Anal. Appl. 391, 265–277 (2012)
Hale, J.K., Peletier, L.A., Troy, W.C.: Stability and instability in the Gray–Scott model: the case of equal diffusivities. Appl. Math. Lett. 12, 59–65 (1999)
Hassard, B.D., Kazarinoff, N.D., Wan, Y.H.: Theory and applications of Hopf bifurcation, vol. 2. Cambridge University Press, London (1981)
Iron, D., Wei, J.C., Winter, M.: Stability analysis of Turing patterns generated by the Schnakenberg model. J. Math. Biol. 49, 358–390 (2004)
Jang, J., Ni, W.M., Tang, M.X.: Global bifurcation and structure of Turing patterns in the 1-D Lengyel–Epstein model. J. Dyn. Differ. Equ. 16, 297–320 (2004)
Jin, J.Y., Shi, J.P., Wei, J.J., Yi, F.Q.: Bifurcations of patterned solutions in diffusive Lengyel–Epstein system of CIMA chemical reaction. Rocky Mount. J. Math. 43, 1637–1674 (2013)
Kolokolnikov, T., Erneux, T., Wei, J.: Mesa-type patterns in the one-dimensional Brusselator and their stability. Phys. D 214, 63–77 (2006)
Levin, S.A.: Dispersion and population interactions. Am. Nat. 108, 207–228 (1974)
Levin, S.A., Segel, L.A.: Pattern generation in space and aspect. SIAM Rev. 27, 45–67 (1985)
Li, L.: Coexistence theorems of steady states for predator–prey interacting systems. Trans. Am. Math. Soc. 305, 143–166 (1988)
Li, X., Jiang, W.H., Shi, J.P.: Hopf bifurcation and Turing instability in the reaction–diffusion Holling–Tanner predator–prey model. IMA J. Appl. Math. 78, 287–306 (2013)
López-Gómez, J., Molina-Meyer, M.: Bounded components of positive solutions of abstract fixed point equations: mushrooms, loops and isolas. J. Differ. Equ. 209, 416–441 (2005)
Malchow, H., Petrovskii, S.V., Venturino, E.: Spatiotemporal Patterns in Ecology and Epidemiology: Theory, Models, and Simulation. Chapman & Hall/CRC Press, London (2008)
McGough, J.S., Riley, K.: Pattern formation in the Gray–Scott model. Nonlinear Anal. Real World Appl. 5, 105–121 (2004)
Medvinsky, A.B., Petrovskii, S.V., Tikhonova, I.A., Malchow, H., Li, B.L.: Spatiotemporal complexity of plankton and fish dynamics. SIAM Rev. 44, 311–370 (2002)
Muratori, S., Rinaldi, S.: Remarks on competitive coexistence. SIAM J. Appl. Math. 49, 1462–1472 (1989)
Ni, W.M., Tang, M.X.: Turing patterns in the Lengyel–Epstein system for the CIMA reaction. Trans. Am. Math. Soc. 357, 3953–3969 (2005). (electronic)
Owen, M.R., Lewis, M.A.: How predation can slow, stop or reverse a prey invasion. Bull. Math. Biol. 63, 655–684 (2001)
Peng, R.: Qualitative analysis of steady states to the Sel’kov model. J. Differ. Equ. 241, 386–398 (2007)
Peng, R., Shi, J.P.: Non-existence of non-constant positive steady states of two Holling type-II predator–prey systems: strong interaction case. J. Differ. Equ. 247, 866–886 (2009)
Peng, R., Shi, J.P., Wang, M.X.: On stationary patterns of a reaction–diffusion model with autocatalysis and saturation law. Nonlinearity 21, 1471–1488 (2008)
Peng, R., Sun, F.Q.: Turing pattern of the Oregonator model. Nonlinear Anal. 72, 2337–2345 (2010)
Peng, R., Wang, M.X., Yang, M.: Positive steady-state solutions of the Sel’kov model. Math. Comput. Model. 44, 945–951 (2006)
Sambath, M., Balachandran, K.: Bifurcations in a diffusive predator-prey model with predator saturation and competition response. Math. Methods Appl. Sci. 38, 785–798 (2015)
Sambath, M., Gnanavel, S., Balachandran, K.: Stability and Hopf bifurcation of a diffusive predator–prey model with predator saturation and competition. Appl. Anal. 92, 2439–2456 (2013)
Schnakenberg, J.: Simple chemical reaction systems with limit cycle behaviour. J. Theor. Biol. 81, 389–400 (1979)
Segel, L.A., Jackson, J.L.: Dissipative structure: an explanation and an ecological example. J. Theor. Biol. 37, 545–559 (1972)
Sherratt, J.A., Eagan, B.T., Lewis, M.A.: Oscillations and chaos behind predator–prey invasion: Mathematical artifact or ecological reality? Philos. Trans. R. Soc. B 352, 21–38 (1997)
Shi, H.B., Yan, L.: Global asymptotic stability of a diffusive predator–prey model with ratio-dependent functional response. Appl. Math. Comput. 250, 71–77 (2015)
Shi, J.P., Wang, X.F.: On global bifurcation for quasilinear elliptic systems on bounded domains. J. Differ. Equ. 246, 2788–2812 (2009)
Song, Y.L., Zou, X.F.: Bifurcation analysis of a diffusive ratio-dependent predator–prey model. Nonlinear Dyn. 78, 49–70 (2014)
Turing, A.M.: The chemical basis of morphogenesis. Philos. Trans. R. Soc. B 237, 37–72 (1952)
Tyson, J.J., Chen, K., Novak, B., et al.: Network dynamics and cell physiology. Nat. Rev. Mol. Cell Biol. 2, 908–916 (2001)
Wang, J.F., Shi, J.P., Wei, J.J.: Dynamics and pattern formation in a diffusive predator–prey system with strong Allee effect in prey. J. Differ. Equ. 251, 1276–1304 (2011)
Wang, M.X.: Non-constant positive steady states of the Sel’kov model. J. Differ. Equ. 190, 600–620 (2003)
Wang, X.C., Wei, J.J.: Diffusion-driven stability and bifurcation in a predator–prey system with Ivlev-type functional response. Appl. Anal. 92, 752–775 (2013)
Ward, M.J., Wei, J.C.: The existence and stability of asymmetric spike patterns for the Schnakenberg model. Stud. Appl. Math. 109, 229–264 (2002)
Wei, J.C.: Pattern formations in two-dimensional Gray–Scott model: existence of single-spot solutions and their stability. Phys. D 148, 20–48 (2001)
Wei, J.C., Winter, M.: Flow-distributed spikes for Schnakenberg kinetics. J. Math. Biol. 64, 211–254 (2012)
Wiggins, S., Golubitsky, M.: Introduction to Applied Nonlinear Dynamical Systems and Chaos, vol. 2. Springer, Berlin (1990)
Wollkind, D.J., Collings, J.B., Barba, M.C.B.: Diffusive instabilities in a one-dimensional temperature-dependent model system for a mite predator–prey interaction on fruit trees: dispersal motility and aggregative preytaxis effects. J. Math. Biol. 29, 339–362 (1991)
Xu, L., Zhang, G., Ren, J.F.: Turing instability for a two dimensional semi-discrete Oregonator model. WSEAS Trans. Math. 10, 201–209 (2011)
Yi, F.Q., Wei, J.J., Junping Shi, J.P.: Diffusion-driven instability and bifurcation in the Lengyel–Epstein system. Nonlinear Anal. Real World Appl. 9, 1038–1051 (2008)
Yi, F.Q., Wei, J.J., Junping Shi, J.P.: Bifurcation and spatiotemporal patterns in a homogeneous diffusive predator–prey system. J. Differ. Equ. 246, 1944–1977 (2009)
Yi, F.Q., Wei, J.J., Junping Shi, J.P.: Global asymptotical behavior of the Lengyel–Epstein reaction–diffusion system. Appl. Math. Lett. 22, 52–55 (2009)
You, Y.C.: Global dynamics of the Oregonator system. Math. Methods Appl. Sci. 35, 398–416 (2012)
Zhou, J., Mu, C.L.: Pattern formation of a coupled two-cell Brusselator model. J. Math. Anal. Appl. 366, 679–693 (2010)
Author information
Authors and Affiliations
Corresponding author
Additional information
This work is partially supported by NSFC Grant 11201380, Project funded by China Postdoctoral Science Foundation Grant 2014M550453 and the Second Foundation for Young Teachers in Universities of Chongqing.
Rights and permissions
About this article

Cite this article
Zhou, J. Bifurcation analysis of a diffusive predator–prey model with ratio-dependent Holling type III functional response. Nonlinear Dyn 81, 1535–1552 (2015). https://doi.org/10.1007/s11071-015-2088-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-015-2088-z