
Abstract
Classical approaches are used to develop rainfall intensity duration frequency curves for the estimation of design rainfall intensities corresponding to various return periods. The study modelled extreme rainfall intensities at different durations and compared the classical Gumbel and generalized extreme value (GEV) distributions in semi-arid urban region. The model and parameter uncertainties are translated to uncertainties in design storm estimates. A broader insight emerges that rainfall extremes in 1 h and 3 h are sensitive to the choice of frequency analysis (GEV in this case) and helps address anticipated intensification of extreme events for short duration at urban local scale. In comparison with Gumbel, GEV predicts higher extreme rainfall intensity corresponding to various return periods and duration (for 1-h duration the increase in extreme rainfall intensity is from 27 to 33% for return periods 10 years and higher, 3-h and 50-year return period—20%, 3-h and 100-year return period—20.6%, 24 h at similar return periods—10%). The Bayesian posterior distribution has a calibration effect on the GEV predictions and reduces the upper range of uncertainty in the GEV probability model prediction from a range of 16–31% to 10–28.4% for return period varying from 10 to 50 year for 1-h storms. In geographically similar areas these extreme intensities may be used to prepare for the rising flash flood risks.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Increasingly, the occurrences of flash floods (Westra et al. 2014) with the rise in intense short-duration rainfalls is leading to a greater demand for understanding rainfall patterns through the local scale hydrologic variables like rainfall intensity of short-duration extreme events (Groisman et al. 2012; Prein et al. 2017). The rainfall intensity duration frequency (IDF) curves are used to design hydraulic structures to carry stormwaters through the city; an increase of 30% in design storm intensity is envisaged for Belgium due to climate change (Willems 2013), an increase of 10% in design estimates for Denmark (Madsen et al. 2009) and 34–48% increase in rainfall (1–24 h) in Vietnam (Vu et al. 2017). The earliest extreme value statistical model used for generating IDF curves using historical daily rainfall datasets is the Gumbel model which uses location and scale parameters (Stedinger et al. 1993; Overeem et al. 2008). In the recent past, the 3-parameter generalized extreme value (GEV) distribution and other extreme value distributions are finding more applications for prediction of extreme rainfall events than Gumbel distribution, as the latter predicts extreme events (especially return period of greater than 50 years) on the lower side (Koutsoyiannis 2007; El Adlouni et al. 2008). The GEV model is robust and offers flexibility in modelling through its three parameters (local, scale and shape), particularly the shape parameter which helps in predicting extremes in intensity of rainfall and flood for a given duration and return period (Wang and Zhang 2008; Villarini and Smith 2010). In the face of climate change, with substantial reduction in return period of extreme rainfall events predicted (IPCC 2014), uncertainties in IDF due to subdaily and hourly changes in extreme rainfall events need to be analysed in detail (Watt and Marsalek 2013; Fadhel et al. 2017). It becomes imperative to assess the frequency and intensity of short-duration extreme rainfall events in semi-arid regions, both spatially and temporally (Buishand 1991). Data on short-duration rainfall are scarce; thus, uncertainty in model and parameters for analysis of extreme events is large (Mélèse et al. 2018). In regional analysis of rainfall extremes, the shape factor of GEV is assumed to be the same in the entire area (0–0.23) and the distribution of maximum rainfall is seen to have a heavy tailed distribution (Koutsoyiannis 2004; Papalexiou and Koutsoyiannis 2013).
Few research studies have attempted to study the rainfall pattern at the local city scale and assess uncertainty due to increasing short-duration rainfall events. The rainfall pattern has been identified to be changing for the city of Melbourne after the 1960s (Yilmaz and Perera 2014). The IDF curves have been updated for the city of Trondheim, Norway, using short-duration extreme intensity rainfall series analysis, and uncertainty bounds have been determined (Hailegeorgis and Alfredsen 2017). IDF curves have been developed using short-duration simulated rainfall events for the city of Mumbai (Rana et al. 2013), while the change in rainfall pattern as a consequence of climate change was studied for Canada (Simonovic et al. 2017). Impact of climate change on extreme rainfall events has been studied in India on a regional scale (north-eastern India) as flood risk has increased (Guhathakurta et al. 2011). Some studies have considered cloudburst, for example, the recent cloudburst in Himalayas at Kedarnath, that reviewed the hydrometeorological parameters which could cause such a catastrophic event (Dimri et al. 2017; Pratap et al. 2020). In case of India, there is an increase in short-duration extreme events in the arid and semi-arid regions (Deshpande et al. 2012; Ali and Mishra 2018). Extreme rainfall at local scale is influenced by moisture increase in the air due to local temperature and convective updraft changes (Wehner 2013; Zhang et al. 2013), and the parameters of the GEV (specially shape factor) can connect the mechanisms of extreme rainfall to physical processes in the atmosphere (Wang and Zhang 2008; Ganguli and Coulibaly 2019).
Since classical models do not account for uncertainties in model parameters, predictions of extreme events often do not match with the observed extreme events (Coles et al. 2003). Classical approach of IDF analysis does not quantify uncertainty in estimation of extremes, though uncertainty estimation through bootstrap resampling has been tried (Overeem et al. 2008; Hailegeorgis et al. 2013) and development of more rigorous statistical methodology for regional analysis of extremes for prediction has been suggested (Katz et al. 2002). Bayesian methods have emerged as an important methodology to quantify uncertainties in extreme quantiles. Bayesian framework may be used to derive an informed or uninformed prior for model parameters to address uncertainties (Huard et al. 2010; Cheng et al. 2014), and the maximum likelihood estimation (MLE) of parameters from the observed data and the inference on model parameters is presented as a posterior distribution. The Bayesian methods give a probabilistic distribution of the parameters under consideration unlike single-point estimate of classical approach and, hence, can address uncertainties better. This approach of addressing uncertainty has been attempted for daily rainfall prediction of high-intensity rainfall storms (Coles and Tawn 2005; Eli et al. 2012), and Bayesian IDF curves have been developed for Belgium, southern Ontario (Van de Vyver 2015; Ganguli and Coulibaly 2019). IDF curves using short- and long-duration storms have been developed with uncertainty range on parameters of GEV distribution for the semi-arid Ghaap Plateau region of South Africa, southern France (Tfwala et al. 2017; Mélèse et al. 2018). Short-duration rainfall is also used for the prediction of rainfall induced landslides where its reliability depends on the uncertainty limits that one can place on the threshold parameters (Luigi et al. 2019). In another recent study, wind speed extremes are analysed at a local level in south-west UK using Bayesian posterior predictive return levels (Fawcett and Green 2018).
The objective of the study is to ascertain model and parameter uncertainty by comparing the IDF curves of different durations developed by classical approaches, namely conventional Gumbel and GEV distribution. The parameter uncertainty in the best fit model is estimated using Bayesian framework of posterior parameter distribution. The study contributes to updating IDF curves with incorporation of uncertainty bounds in the statistical estimate of hourly rainfall extremes, at city level in semi-arid regions. Quantifying uncertainties realistically in short-duration extreme rainfall is crucial to mitigate flood risks as there is considerable variability in rainfall in the semi-arid regions. The Bayesian approach (applied on GEV distribution parameters) is applied for ascertaining the uncertainties in extreme rainfall events for the megacity as the hydrometeorological attributes causing the extreme rainfall event is not clearly understood yet.
2 Site description and meteorological data
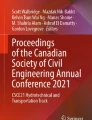
The National Capital Territory (NCT) of Delhi falls within the semi-arid region of Punjab, Haryana, and eastern Rajasthan. As shown in Fig. 1, the national capital territory (NCT) of Delhi is located between 28° 24′ 17″ N and 28° 53′ 00″ N and 77° 50′ 24″ E and 77° 20′ 37″E, the NCT has an area of 1483 km2, while with the four smaller cities the urban area is around 3000 km2 (NCRPB 2016). The study area, NCT Delhi, is 1483 km2 located within the national capital region (NCR) of Delhi which has multiple smaller cities like Ghaziabad, Faridabad, Gurugram and Noida which are influenced by the NCT’s urbanization pattern and face similar challenges of flood hazard due to short-duration extreme rainfall (Padmanabhan et al. 2019). The mean annual rainfall in national capital territory (NCT) of Delhi is around 714 mm with 75% rainfall happening in July–September (Kumar et al. 2019).

Source: (Delhi Traffic Police 2013) Elevation map of Delhi is shown using SRTM 30-m DEM
The locations of water logging shown as red spots within Delhi city.
The number of rainy days has decreased in the last few decades, and intensity of rainfall has increased (DES 2016). The NCT of Delhi comprises low-lying areas around the flood plains of river Yamuna and areas of the low-lying older alluvium plains where the elevation is between 190 and 220 m (as shown in the DEM data, Fig. 1) and as cited by (Sarkar et al. 2016). As seen from the map shared by Delhi Traffic Police, and comparing with the DEM data, the areas of water logging during rainfall episodes of 10 mm/h or higher are in locations where the elevation difference drops sharply (from 263 to 224 m) leading to runoff accumulation after extreme rainfall episodes causing urban flash flood and traffic disruptions. The storm drainage infrastructure has been designed for 25 mm/h rainfall intensity for 15-min to 1-h rainfall (NCRPB 2016). In the meanwhile, the land use of the area has changed with change in built-up area and heavy traffic flow coming and going out of the city to the adjacent regions.
For this study, the meteorological data have been collected for Safdarjung rainfall station of Delhi, it being the most representative of Delhi region (rainfall in this region being homogeneous) and hourly data being available (data period 1968–2014). Maxima hourly series of 1 h, 2 h, 3 h, 6 h and 24 h are selected for the study. This has been obtained from India Meteorological Department (IMD).
3 Methodology
3.1 Classical approach
IDF curves are generated using extreme value statistical models like the generalized extreme value GEV and the Gumbel model. The GEV model is a 3-parameter distribution, characterized through the location, scale and shape parameter having the distribution function as defined below (Huard et al. 2010):
where z is the extreme rainfall intensity value (mm/h) for the specified hourly1 distribution, the parameter space is represented as {(μ, σ, k): θ}, commonly the three-parameter space is represented by θ, the location parameter (µ) represents the mean or centre of the distribution, has the same units as rainfall intensity (z, mm/h), the scale parameter (σ) represents the magnitude of deviation around the location parameter or mean (mm/h), has the same units as rainfall intensity (mm/h), and the shape parameter (k) represents the tail behaviour of the extreme value distribution. The shape factor (k) of GEV explains the heavy upper tail of the probability distribution, which is represented by the skew of the distribution curve to the right k varying between ± 0.5 (Martins and Stedinger 2000; Ragulina and Reitan 2017; Ganguli and Coulibaly 2019). When shape factor tends to be zero, the distribution becomes the Gumbel distribution with only two parameters, namely, mean and scale, and the upper tail is a thin tail.
The shape factor k → 0, the GEV distribution reduces to the following Gumbel distribution (Kottegoda and Rosso 2008):
The Gumbel model is the most popular model to develop IDF curves for prediction of extreme rainfall events till date.
The commonly used parameter estimation method of maximum likelihood estimation (MLE) is considered for parameter estimation, though there are other methods like L-moments and method of moments (MOM) used in hydrology. The MLE method maximizes the logarithm of the likelihood function as shown in the equation below:
The maximum likelihood function L is used to estimate the parameters of any statistical distribution like the Gumbel model and the GEV model, where function f (z: μ,σ,k) is the general GEV function with three parameters. The Gumbel distribution would have two parameters (μ, σ). In the MLE method, the log likelihood function is maximized with respect to the three parameters μ,σ,k for GEV model and two parameters µ and σ of Gumbel and the point estimates are obtained (Kottegoda and Rosso 2008).
Once the point estimates of the parameters are determined using MLE, IDF curve for each duration is developed to determine the extreme rainfall intensity for return periods T = 2, 5, 10, 25, 50, 100 and 200 year. The magnitude of extreme intensity \(Z_{{\text{T}}}\) for each hour is determined from GEV model (4a) and Gumbel model (4b) as follows (Van de Vyver 2015):
where T is the return period used in IDF curves (in the study, T = 2, 5, 10, 25, 50, 100 and 200 year).
3.2 Uncertainty analysis
For short-duration extreme rainfall data, the information is scarce (only short record length is available for many stations); hence, the lack of observed data of extremes makes it difficult for the classical approach to predict short-duration extreme rainfall magnitudes with certainty. The parameter estimation using MLE for short-duration data series is not considered very effective when the data period is short (number of years of data available is less than 30 years). MLE method gives point estimates of the parameters which do not address parameter uncertainty. The 95% confidence limits are used to determine the uncertainty in prediction levels for both the classical methods of GEV and Gumbel. It is seen that the prediction range of intensity magnitudes at higher return periods is large, leading to uncertainties.
The uncertainty arises in predictions because the extreme rainfall series available for developing IDF curves are rarely more than 50 years, while the rare extreme event prediction is for greater than 50 years, which is obtained by extrapolating from best probability model. In the conventional framework (also known as frequentist framework), the uncertainty arises as there is no true fit probability model, on the contrary models like the Gumbel can give large differences from the observed value at return levels for 100 years leading to underestimation of risk of flood (Cheng et al. 2014; Hailegeorgis and Alfredsen 2017). Bootstrap sampling is used to address uncertainty in conventional framework through confidence intervals (CI) estimates at each quantile which are very wide (Overeem et al. 2008; Hailegeorgis et al. 2013). Uncertainty estimation in IDF using bootstrap sampling for conventional GEV distribution on annual maxima series of duration 3–120 h is compared with Bayesian framework in South France (Mélèse et al. 2018). They have used data from different rainfall stations across different climatic zones in Southern France (from humid to semi-arid) and find the Bayesian framework to be more robust in carrying out uncertainty estimation. Thus, the uncertainty in parameter estimates is not well addressed in classical approach (Coles et al. 2003; Mélèse et al. 2018).
3.3 Bayesian approach to development of IDF curves
The classical approach uses the annual maxima series (AMS) of the chosen hourly rainfall, and typically a statistical distribution is selected, and the parameters are determined using MLE as explained in the above section. The Bayesian approach differs majorly in the way the parameter estimation is performed; instead of a point estimate, the entire probability distribution of parameters is considered. The Bayesian inference method is unique in its approach as it incorporates prior information about the parameter estimation space. This prior information is incorporated as a distribution which represents the belief about the parameter values before the dataset has been obtained. The approach adopted in Bayesian paradigm is that once the observed data are interpreted through the likelihood function similar to the classical approach, the integral of the likelihood function and the prior distribution results in a posterior distribution of the parameter estimate (Coles and Tawn 1996).
One key advantage of the Bayesian method is the way the prior distribution of parameters is chosen. The Bayesian approach is a flexible approach which allows even arbitrary informative priors to be incorporated (Renard et al. 2013; Ragulina and Reitan 2017; Mélèse et al. 2018; Ganguli and Coulibaly 2019). Moreover, the inference was proved to be better for data analysis than the MLE process, and this approach was tried for the first time with the Weibull distribution (Smith and Naylor 1987). The parameters of the gamma distribution have been used as a measure of location and variability for prior information on probabilities of return levels of rainfall (Coles and Tawn 1996). This approach is used to predict the extremely high rainfall in Venezuela which otherwise had extreme low probability of occurrence in the classical approach (Coles et al. 2003). The approach of assuming beta prior for shape factor of GEV distribution for extreme rainfall events has been initially suggested for extreme value quantile estimators (Martins and Stedinger 2000) and later for developing IDF for Quebec, Canada (Huard et al. 2010) and for predicting future IDF relationships using GCM models for Bangalore, India (Chandra et al. 2015). The present study assumes objective prior for location and Jeffrey prior for scale parameters because the location and scale parameters represent the characteristics of the local city which is unique to the city, while the shape factor is assumed to be a prior beta distribution for it represents the regional influence which remains constant in similar climatic zones (Papalexiou and Koutsoyiannis 2013; Ragulina and Reitan 2017). The literature review points to the acceptability of Bayesian approach for considering uncertainties due to scarcity of data at local level and that uncertainty in estimates may only be reduced and never removed completely from extreme quantiles.
In case of the GEV distribution, the posterior \(\Pi (\theta /z)\) is obtained as product of the likelihood function of the parameters (represented as θ) and the prior distribution of the parameters \( \Pi (\theta )\), shown by the following equation (Kottegoda and Rosso 2008):
where \(L(z/\theta ) = \mathop \prod \nolimits_{i = 1}^{n} f(z_{i} /\theta )\) is the likelihood function as explained in Eq. (3), which is determined by solving the log likelihood function where f(zi/θ) is the pdf of the annual maximum hourly rainfall series over the parameter set θ.
The prior distribution of parameters, Π (θ), used in Bayesian analysis is given as:
where the parameter set \(\theta \) includes \( \mu ,\;\sigma \;{\text{and}}\;k\) of the GEV distribution. The mean and standard deviation have been assumed to have uniform prior and Jeffrey’s prior, respectively, while the shape factor has been assigned a beta prior (Huard et al. 2010; Chandra et al. 2015; Mélèse et al. 2018).
The Bayesian approach is used because some prior knowledge exists from the data and in literature about the shape factor and it has been used for extreme rainfall modelling (Coles and Tawn 1996; Coles 2001; Eli et al. 2012; Chandra et al. 2015). For uncertainty assessment in parameter (shape factor) and extreme rainfall prediction thereafter, there are few standard techniques in frequentist approach (Overeem et al. 2008; Hailegeorgis and Alfredsen 2017; Mélèse et al. 2018). The Bayesian approach is considered robust as the uncertainty can be read directly from the posterior distribution of any Bayesian analysis carried out on GEV parameters. Whether gamma prior (Coles et al. 2003), or normal prior (Renard et al. 2013) or beta prior is used (Huard et al. 2010; Chandra et al. 2015; Mélèse et al. 2018), the posterior distribution returns the optimized shape factor. The shape factor for 24 h events is determined as 0.14–0.16 in India (Ragulina and Reitan 2017). This shape factor is then used to obtain extreme magnitudes for different return periods with 95% credible limits. The range of magnitude values is specified which limits the uncertainty. The shape factor of GEV is limited to − 0.33 to 0.33 for 1–6-h duration extreme rainfall in southern Ontario (Ganguli and Coulibaly 2019) which is slightly different from as obtained by Ragulina and Reitan (2017) for the same region. A very negative value of shape factor beyond − 0.3 suggests a very negative tail signifying the extreme rainfall going beyond the physical bounds of extreme rainfall.
This choice of beta distribution allows the extreme value statistical model to predict the range of extreme rainfall events with high return period of 50 year or more satisfactorily, across the world. The prior distribution of k is represented as (0.5 + k) in the beta distribution by the two hyperparameters of the beta distribution, namely, α and β as shown in Eq. (6). This is because the shape factor has values in the range of − 0.3 to 0.3, while the hyperparameters of the beta distribution take values greater than zero only (the value of shape parameter varies between 0.13 and 0.16 for daily rainfall for India (Ragulina and Reitan 2017)). When the shape factor is constrained through the Bayesian prior distribution (k + 0.5), then the Bayesian method gives the best results and restricts uncertainty in parameter estimation, which is then transformed to design extreme rainfall intensity.
The prior distribution for θ (assumed to be beta distribution) is reported as follows:
Using the beta distribution as the prior distribution of the parameter set and the likelihood value of GEV parameters, the posterior pdf of θ has been obtained as a beta distribution. Markov chain Monte Carlo (MCMC) method of sampling is used to obtain the posterior distribution of parameters using the Metropolis–Hastings random walk method. A large sample set of θ (θ1, θ2, θ3, θ4,… θN), is required from the posterior distribution of θ, and the MCMC method is used to draw large samples of θ, setting the posterior distribution of Π (θ/z) as the stationary distribution (Chandra et al. 2015). The MCMC simulations can be performed multiple times from which a set of samples can be chosen for obtaining the posterior mean of the parameter set. Then, from the posterior distribution, the parameter set is substituted in Eq. (1a) to obtain the extreme intensity magnitudes at specified return levels to develop the Bayesian IDF.
By adopting the Bayesian approach, the uncertainty associated with the point estimates of parameters is addressed as posterior probability distribution and the analysis is not affected by the lack of adequate data on short-duration extreme rainfall events. To determine the limits of uncertainty in the Bayesian IDF, Bayesian credible intervals (BCI) are used, as there is 95% probability that the true parameter lies within this interval. The R package “evdbayes” is used to carry out Bayesian analysis of extremes in univariate GEV model (Gilleland et al. 2013).
4 Results and discussion
4.1 Development of IDF curves using Gumbel and GEV model
The hourly AMS series are analysed using Gumbel and GEV models, and it is seen that up to 5-year return period, the variation in the extreme rainfall prediction is indistinguishable amongst the two classical models used for development of IDF (Fig. 2a, b). The IDF curves are plotted for return periods of 2, 5, 10, 25, 50, 100, and 200 year. The GEV model predicts 27–33% higher intensity for 1-h duration storms than Gumbel model for return periods 10 year, 25 year, 50 year, 100 year, which truly represents the upper tail behaviour of EVD. The Gumbel model predicts lower intensities than the GEV model because the shape factor parameter is absent (GEV has better fit to data as seen through goodness of fit tests). The variation in intensity at return period of 100 year between the two classical models across rainfall durations is shown in Table 1. A narrow uncertainty range is seen in the Gumbel model even at large return periods, of 50, 100 and 200 year (Fig. 2a), while the uncertainty range is high in the GEV model, as is observed from the large CI (Fig. 2b). The difference in the CI widths between the two models is very distinct for the higher return periods (Fig. 2a, b). For 50-year return period the Gumbel model returns 56.37 mm/h, 62.63 mm/h as the lower and upper CI range for the rainfall intensity, mean value is 59.50 mm/h (Fig. 2a), while for GEV model CI is 64.76 mm/h and 108.00 mm/h, respectively (mean value is 82.31 mm/h). The upper CI for GEV is 31.3% and the lower CI is 20.83% for 50-year return period, and the upper CI for GEV model at 100 year is 38.8% which is wider than the upper CI at 50-year return period (Fig. 2b).

Design rainfall intensities estimated using: a Gumbel and b GEV models for 1-h extreme rainfall duration along with upper and lower confidence limits (CI)
The ratio of estimates of magnitude of rainfall intensities between the Gumbel and GEV models at a return period of 100 year for 1-h extreme rainfall is 0.7 (Table 1). In order to address the short-duration extreme intensity rainfall which is likely to rise in future (IPCC 2014), GEV model with better predictive characteristic needs to be adopted. In cities like Delhi where thunderstorms result in higher-intensity rainfall events, an extreme event of 100 mm/h rainfall intensity of 1-h duration if incorporated using Gumbel model will have a very low probability (close to zero, p < 0.005), (Fig. 2a), indicating that the return period would be very large, while the GEV distribution would make it probable at p = 0.01(Fig. 2b). The wide upper CI range for GEV models at high return periods of 50 and 100 years increases the uncertainty of prediction of these rare events (these upper ranges are similar to what is found using bootstrap resampling on GEV distribution) (Hailegeorgis et al. 2013).
4.2 Uncertainties in rainfall estimates
The frequency and magnitude of short-duration extreme rainfall events are increasing in different parts of the world, and this is seen through various global climate model and regional climate model predictions and historical observations (Prein et al. 2017; Vu et al. 2017; Ganguli and Coulibaly 2019). In India, 1-h, 3-h, 6-h, and 12-h duration extreme rainfall events have been studied for a period of 1969–2005, across 72 stations by Deshpande et al. (2012), and it is found that 25% of the daily rainfall can be in less than 3 h and 80% within 12 h. They observe that several rainfall stations recorded more than 100 mm of rainfall in 1 h irrespective of whether the station is in very humid western coast (receives 800–1000 h/year) or semi-arid north-west India (100 h/year). In a place like Delhi which receives annual rainfall of 714 mm, it has received 112 mm in 1 h and 137 mm in 3 h, causing flood hazard. Till date no other study has been undertaken to estimate the uncertainty in the magnitude of these storms at various return periods to devise flood risk strategies for these hazards.
For extreme magnitudes of 75 mm/h or more for 1-h duration of rainfall (Fig. 2a), the Gumbel model assigns a return period more than 200 years (p < 0.005), while the GEV model predicts a plausible return period 100 years, p = 0.01 (Fig. 2b). The GEV model has the advantage of higher prediction than Gumbel model, but the CI, range is very wide for higher return periods (Fig. 2b). The 3-h duration rainfall events are also studied, and similar differences in prediction uncertainty were found. The Gumbel model showed less uncertainty through narrow range (Fig. 3a), but it predicts 17–21% lower than GEV across return periods of 10-year, 25-year, 50-year, 100-year GEV. The GEV model at 50-year return period has lower and upper limit of 31.9 mm/h and 52.35 mm/h, respectively (Fig. 3b). It is seen that the uncertainty in prediction levels increases with the increase in return period and decreases with the increase in the duration of the extreme rainfall (upper CI at 50-year return period is 31.3.6%, while at 100 year it is 38.8%, while the lower bounds are 20.83% and 23.5% at 50 year and 100 year, respectively). There is a need for having additional information to improve the accuracy in estimating the probability of events at higher return periods. This additional information is provided through the Bayesian inference which is considered more robust than the bootstrap resampling method used for classical approach (Van de Vyver 2015; Mélèse et al. 2018).

Design rainfall intensities estimated using: a Gumbel and b GEV models for 3-h extreme rainfall duration along with upper and lower limits
4.3 Bayesian IDF model
Since the Gumbel model predicts extreme intensity on lower side for all durations including 24 h, the GEV model is used for updating IDF using Bayesian approach. The parameter estimation of GEV model is used as likelihood data to be adopted for Bayesian analysis. The Bayesian analyses do not give a radically different result than MLE; however, its difference in approach is in the way the uncertainty is expressed and managed. The Bayesian posterior prediction is based on the posterior parameter estimation in the form of a probability density function (pdf). The posterior parameter distribution agrees well with the MLE-GEV parameter (shape parameter 1 h-0.09 ± 0.13 and 3 h is 0.02 ± 0.13, Table 1) and the informed prior, thereby reinforcing the importance of the prior. The prior is chosen from the knowledge (scientific belief) based on understanding of meteorology (Coles and Powell 1996). The posterior parameter distribution is sharper than the prior; thereby, the prediction narrows the band of limits in the extreme events (Fig. 4). The informed beta prior of 0.4 (θ) on the parameter space and the likelihood dataset variation from 0.2 to 0.8, takes care of the parameter shape factor variation so that it is in the range of k: − 0.3 to 0.3, a negative value of shape factor beyond − 0.3 suggests a very negative tail which is beyond the physical bounds of extreme rainfall (Martins and Stedinger 2000; Ganguli and Coulibaly 2017). For GEV distribution parameters, objective priors are taken on location and Jeffreys for scale and subjective beta prior for shape, and there is no consensus on the choice of Bayesian priors (Chandra et al. 2015; Van de Vyver 2015; Mélèse et al. 2018). Choosing the informed prior of 0.4 based on expert opinion and scientific belief has been crucial in obtaining the posterior (Martins and Stedinger 2000; Huard et al. 2010). The resulting posterior distribution of θ using MCMC and “evdbayes” in R, narrows down the probabilistic variation of the parameter (Fig. 4). The posterior distribution of parameter thus obtained is transformed in the GEV distribution, with revised means, standard deviation, and confidence limits which leads to development of the Bayesian extreme rainfall intensity return levels for different return periods.

Bayesian prior, likelihood, and posterior distribution of parameter (theta, θ)
The classic GEV model has large band widths in confidence intervals (CI) at higher return levels. Bayesian approach reduces the band width, and the resultant reduced band width is referred to as Bayesian credible limits (CL). The Bayesian credibility limits improve prediction of extreme rainfall intensities and thus is found to more robust in uncertainty estimation than CI (Fig. 5).

GEV and Bayesian models for 1-h extreme rainfall duration showing the mean and upper and lower credible limits of prediction. The shaded region indicates the credible interval of the Bayesian model, design intensity of 20 mm/h for city stormwater drainage (NCRPB 2016) is much lower
The results of the updated Bayesian model are compared with the GEV model estimates for the 1-h duration rainfall. The lower and upper credible limits for 1-h duration rainfall for 50-year return period is 65.57 mm/h, 101.57 mm/h which is lower than upper CI of 108 mm/h for GEV, while for 100 year it is 69.64 mm/h and 122.03 mm/h (lower than upper CI of 128.9 mm/h for GEV) as shown in Fig. 5. The mean of the extreme magnitudes is below the mean obtained from the GEV model (79.1 mm/h instead of 82.31 mm/h at 50 years and 88.23 mm/h instead of 92.31 mm/h at 100 years). The calibration effect of the informed prior in the updated Bayesian IDF curve can be seen from the lower mean value of Bayesian curve (blue line in Fig. 5). The upward revision of the extreme rainfall magnitude is important to incorporate in design of water conservation measures and assist in mitigation strategies for natural hazards.
The Bayesian IDF prediction curve is developed for 3-h rainfall duration too, and the rainfall intensity for 3 h shows narrow BCI at 50-year return (36.55 mm/h, 49.71 mm/h) period as compared to the GEV model (31.91 mm/h, 52.35 mm/h) which points to the reduction in parameter uncertainty by reducing the range of extreme rainfall intensity to between 36.55 and 49.7 mm/h at 3-h duration using Bayesian approach in comparison with GEV-MLE model (Fig. 6).

GEV and Bayesian models for 3-h extreme rainfall duration showing the mean and upper and lower confidence limits of prediction. The shaded region indicates the confidence interval of Bayesian model
The 1-h and 3-h duration storms are compared with the 24-h duration storm, and the GEV MLE model with the Bayesian approach for 24-h duration shows that both the GEV CI and the Bayesian CI are narrow (Fig. 7). The study shows that the uncertainty in the extreme values is larger for short-duration rainfalls, while for 24 h extreme event is narrow even for 100-year return period for GEV model (7.71–12.47 mm/h) and Bayesian model (8.37–14.23 mm/h); however, for 24-h duration extreme rainfall Bayesian approach provides higher values than the corresponding GEV model and may prove to be a better estimate of range (Fig. 7).

GEV and Bayesian model for 24-h extreme rainfall duration showing the mean, upper, and lower confidence limits of prediction
In comparison with Gumbel, GEV predicts higher extreme rainfall intensity corresponding to various return periods and durations (for 1-h duration the increase in extreme rainfall intensity is from 27 to 33% for return periods 10 years and higher, 3 h and 50-year return period—20%, 3-h and 100-year return period—20.6%, 24 h at similar return periods—10%). The projected changes in short-duration rainfall allude to the mechanisms which cause convective updraft to cause moisture increase in the atmosphere locally, and GEV model proves to be a better fit model. Thus, flash flood potentials of short-duration storms can be predicted by the GEV model.
In this study with the inclusion of posterior inference in the IDF curve estimation process, the uncertainty in prediction range is addressed. It is found that the prior information has a calibration effect on the MLE GEV classical approach estimation which is seen from the precision provided by the credibility intervals. The MCMC procedure allows the most optimized posterior parameter characteristics to be adopted for prediction. The Bayesian updating of IDF values provides 95% chance that the intensity estimate for 1 h storm will be 38.19–38.45 mm/h for a return period of 2 year, 54.33–65.17 mm/h for 10-year return, 61.07–84.19 mm/h for 25 year and for 50 year is within 65.57–101.57 mm/h, for 100 year the intensity estimate varies from 69.64 mm/h to 122.03 mm/h. Very few studies examine uncertainty in IDF curves for extreme hourly rainfall in detail, and this study uncertainty estimates may be applied in ungauged basins in similar geographical regions.
Extreme events are rare; they must be analysed with greater robustness as they are likely to increase in the future and any underestimation leads to flood risk. It is seen from this study that temporal variation of extreme rainfalls with uncertainty estimates for different durations with relatively narrow BCI reduces the risk of unrealistic return-level predictions at higher return periods (Gilleland et al. 2017). The Bayesian posterior distribution has a calibration effect on the GEV predictions and reduces the upper range of uncertainty in the GEV probability model prediction from a range of 16–31% to 10–28.4% for return period varying from 10 to 50 year for 1-h storms. The NCT Delhi has changed considerably due to rapid urbanization such that the typical routes of infiltration and natural hydrological channels have reduced so adoption of updated Bayesian IDF (which resolves model and parameter uncertainty) is capable to assess flash flood generated from extreme events.
5 Conclusions
Prediction of hourly and subdaily rainfall extremes is critical in hydrologic design at local level; however, they are not captured in global and regional climate models owing to spatial and temporal resolution issues. The causes of such local extremes due to convective precipitation go unnoticed in semi-arid regions. Our methodological approach includes model and parameter uncertainty estimation with focus on improving the GEV parameter values through Bayesian posterior distribution. The more reliable Bayesian credible limits guide in informed decision making for the hydraulic design of stormwater infrastructure. For a city like Delhi with existing infrastructure the updated reliable estimates of extreme intensities will help in flood mitigation through implementation of blue green subsystems.
The current storm water infrastructure of NCT Delhi is unable to cope especially in low-lying areas as they are designed using the high probability, low consequence design approach (the uncertainty if not measured in rainfall estimates will propagate to storm runoff estimates too). The megacity is left with very minimal natural sinks to cope with natural hazards which will occur in the uncertain future. IDF curves of the past which were used to determine the rainfall estimates for storm runoff generation do not account for uncertainty, while there is an upward revision in the extreme rainfall intensities by 27–33% for different return periods in 1-h duration which is the most common rainfall category in Delhi. This study contributes towards providing a methodology for improving the prediction of extreme rainfall events which is needed in data sparse semi-arid region for 1-h, 3-h, 24-h extreme rainfall events which have not been done earlier and may be adopted in smaller cities and towns in the semi-arid region. However, the linkage of extreme magnitude rainfall of short-duration with other climate variables has not been considered in this study, which may be taken up in a future study.
References
Ali H, Mishra V (2018) Increase in subdaily precipitation extremes in India under 1.5 and 2.0 °C warming worlds. Geophys Res Lett 45:6972–6982. https://doi.org/10.1029/2018GL078689
Buishand TA (1991) Extreme rainfall estimation by combining data from several sites. Hydrol Sci J. https://doi.org/10.1080/02626669109492519
Chandra R, Saha U, Mujumdar PP (2015) Model and parameter uncertainty in IDF relationships under climate change. Adv Water Resour 79:127–139. https://doi.org/10.1016/j.advwatres.2015.02.011
Cheng L, AghaKouchak A, Gilleland E, Katz RW (2014) Non-stationary extreme value analysis in a changing climate. Clim Change. https://doi.org/10.1007/s10584-014-1254-5
Coles SG (2001) An introduction to statistical modeling of extreme values. Springer Series in Statistics. Springer, Berlin
Coles SG, Powell EA (1996) Bayesian methods in extreme value modelling: a review and new developments. Int Stat Rev/Rev Int Stat. https://doi.org/10.2307/1403426
Coles SG, Tawn J (1996) A Bayesian analysis of extreme rainfall data. Appl Stat 45:463–478
Coles S, Tawn J (2005) Bayesian modelling of extreme surges on the UK east coast. Philos Trans R Soc A Math Phys Eng Sci 363:1387–406
Coles S, Pericchi LR, Sisson S (2003) A fully probabilistic approach to extreme rainfall modeling. J Hydrol. https://doi.org/10.1016/S0022-1694(02)00353-0
Delhi Traffic Police (2013) Coles and Powell. Waterlogging Map Delhi
DES (2016) Statistical Abstract of Delhi, Report. Directorate of Economics & Statistics, Delhi
Deshpande NR, Kulkarni A, Krishna Kumar K (2012) Characteristic features of hourly rainfall in India. Int J Climatol 32:1730–1744. https://doi.org/10.1002/joc.2375
Dimri AP, Chevuturi A, Niyogi D et al (2017) Cloudbursts in Indian Himalayas: a review. Earth Sci Rev 168:1–23
El Adlouni S, Bobée B, Ouarda TBMJ (2008) On the tails of extreme event distributions in hydrology. J Hydrol 355:16–33. https://doi.org/10.1016/j.jhydrol.2008.02.011
Eli A, Shaffie M, Zin WZW (2012) (2012) Preliminary study on Bayesian extreme rainfall analysis: a case study of Alor Setar, Kedah, Malaysia. Sains Malays 41:1403–1410
Fadhel S, Rico-Ramirez MA, Han D (2017) Uncertainty of intensity–duration–frequency (IDF) curves due to varied climate baseline periods. J Hydrol 547:600–612. https://doi.org/10.1016/j.jhydrol.2017.02.013
Fawcett L, Green AC (2018) Bayesian posterior predictive return levels for environmental extremes. Stoch Environ Res Risk Assess 32:2233–2252. https://doi.org/10.1007/s00477-018-1561-x
Ganguli P, Coulibaly P (2017) Does nonstationarity in rainfall require nonstationary intensity–duration–frequency curves? Hydrol Earth Syst Sci. https://doi.org/10.5194/hess-21-6461-2017
Ganguli P, Coulibaly P (2019) Assessment of future changes in intensity-duration-frequency curves for Southern Ontario using North American (NA)-CORDEX models with nonstationary methods. J Hydrol Reg Stud 22:100587. https://doi.org/10.1016/j.ejrh.2018.12.007
Gilleland E, Ribatet M, Stephenson AG (2013) A software review for extreme value analysis. Extremes 16:103–119
Gilleland E, Katz RW, Naveau P (2017) Quantifying the risk of extreme events under climate change. CHANCE. https://doi.org/10.1080/09332480.2017.1406757
Groisman PY, Knight RW, Karl TR (2012) Changes in intense precipitation over the central United States. J Hydrometeorol 13:47–66. https://doi.org/10.1175/JHM-D-11-039.1
Guhathakurta P, Sreejith OP, Menon PA (2011) Impact of climate change on extreme rainfall events and flood risk in India. J Earth Syst Sci. https://doi.org/10.1007/s12040-011-0082-5
Hailegeorgis TT, Alfredsen K (2017) Analyses of extreme precipitation and runoff events including uncertainties and reliability in design and management of urban water infrastructure. J Hydrol. https://doi.org/10.1016/j.jhydrol.2016.11.037
Hailegeorgis TT, Thorolfsson ST, Alfredsen K (2013) Regional frequency analysis of extreme precipitation with consideration of uncertainties to update IDF curves for the city of Trondheim. J Hydrol 498:305–318. https://doi.org/10.1016/j.jhydrol.2013.06.019
Huard D, Mailhot A, Duchesne S (2010) Bayesian estimation of intensity–duration–frequency curves and of the return period associated to a given rainfall event. Stoch Environ Res Risk Assess. https://doi.org/10.1007/s00477-009-0323-1
IPCC (2014) Climate change 2014
Katz RW, Parlange MB, Naveau P (2002) Statistics of extremes in hydrology. Adv Water Resour. https://doi.org/10.1016/S0309-1708(02)00056-8
Kottegoda NT, Rosso R (2008) Applied statistics for civil and environmental engineers. Wiley, New York
Koutsoyiannis D (2004) Statistics of extremes and estimation of extreme rainfall: II. Empirical investigation of long rainfall records. Hydrol Sci J 49:591–610. https://doi.org/10.1623/hysj.49.4.591.54424
Koutsoyiannis D (2007) A critical review of probability of extreme rainfall: principles and models. In: Ashley R, Garvin S, Pasche E, Vassilopoulos A, Zevenbergen C (eds) Advances in urban flood management. Taylor & Francis, Boca Raton, pp 139–166
Kumar M, Sharif M, Ahmed S (2019) Flood risk management strategies for national capital territory of Delhi, India. ISH J Hydraul Eng 25:248–259. https://doi.org/10.1080/09715010.2017.1408434
Luigi S, Massimo G, Silvia M, Brunetti MT (2019) How much does the rainfall temporal resolution affect rainfall thresholds for landslide triggering ? Nat Hazards. https://doi.org/10.1007/s11069-019-03830-x
Madsen H, Arnbjerg-Nielsen K, Mikkelsen PS (2009) Update of regional intensity–duration–frequency curves in Denmark: tendency towards increased storm intensities. Atmos Res 92:343–349. https://doi.org/10.1016/j.atmosres.2009.01.013
Martins ES, Stedinger JR (2000) Generalized maximum-likelihood generalized extreme-value quantile estimators for hydrologic data. Water Resour Res. https://doi.org/10.1029/1999WR900330
Mélèse V, Blanchet J, Molinié G (2018) Uncertainty estimation of intensity–duration–frequency relationships: a regional analysis. J Hydrol 558:579–591. https://doi.org/10.1016/j.jhydrol.2017.07.054
NCRPB (2016) Planning and design of surface drains. In: Functional plan on drainage for NCR, 5th edn. Ministry of Urban Development, Government of India, New Delhi
Overeem A, Buishand A, Holleman I (2008) Rainfall depth–duration–frequency curves and their uncertainties. J Hydrol. https://doi.org/10.1016/j.jhydrol.2007.09.044
Padmanabhan V, Alexander S, Srivastava P (2019) The growing threat of climate change in India. Livemint,e Pap
Papalexiou SM, Koutsoyiannis D (2013) Battle of extreme value distributions: a global survey on extreme daily rainfall. Water Resour Res 49:187–201. https://doi.org/10.1029/2012WR012557
Pratap S, Srivastava PK, Routray A et al (2020) Appraisal of hydro-meteorological factors during extreme precipitation event: case study of Kedarnath cloudburst, Uttarakhand, India. Nat Hazards. https://doi.org/10.1007/s11069-019-03829-4
Prein AF, Rasmussen RM, Ikeda K et al (2017) The future intensification of hourly precipitation extremes. Nat Clim Change 7:48–52. https://doi.org/10.1038/nclimate3168
Ragulina G, Reitan T (2017) Generalized extreme value shape parameter and its nature for extreme precipitation using long time series and the Bayesian approach. Hydrol Sci J 62:863–879. https://doi.org/10.1080/02626667.2016.1260134
Rana A, Bengtsson L, Olsson J, Jothiprakash V (2013) Development of IDF-curves for tropical India by random cascade modeling. Hydrol Earth Syst Sci Discuss. https://doi.org/10.5194/hessd-10-4709-2013
Renard B, Sun X, Lang M (2013) Bayesian methods for non-stationary extreme value analysis. In: AghaKouchak A, Easterling D, Hsu K, et al. (eds) Extremes in a changing climate. Springer, Dordrecht, pp 39–96
Sarkar A, Ali S, Kumar S et al (2016) Groundwater environment in Delhi, India. In: Shrestha S, Pandey VP, Shivakoti BR, Thatikonda S (eds) Groundwater environment in Asian Cities. Elsevier, Amsterdam, pp 77–108
Simonovic SP, Schardong A, Sandink D (2017) Mapping extreme rainfall statistics for Canada under climate change using updated intensity-duration-frequency curves. J Water Resour Plan Manag. https://doi.org/10.1061/(ASCE)WR.1943-5452.0000725
Smith RL, Naylor JC (1987) A comparison of maximum likelihood and Bayesian estimators for the three-parameter Weibull distribution. Appl Stat. https://doi.org/10.2307/2347795
Stedinger JR, Vogel RM, Foufoula-Georgiou Ε (1993) Frequency analysis of extreme events. In: Maidment DR (ed) Handbook of hydrology. McGraw-Hill, New York
Tfwala CM, van Rensburg LD, Schall R et al (2017) Precipitation intensity–duration–frequency curves and their uncertainties for Ghaap plateau. Clim Risk Manag 16:1–9. https://doi.org/10.1016/j.crm.2017.04.004
Van de Vyver H (2015) Bayesian estimation of rainfall intensity–duration–frequency relationships. J Hydrol. https://doi.org/10.1016/j.jhydrol.2015.08.036
Villarini G, Smith JA (2010) Flood peak distributions for the eastern United States. Water Resour Res. https://doi.org/10.1029/2009WR008395
Vu MT, Raghavan VS, Liong S-Y (2017) Deriving short-duration rainfall IDF curves from a regional climate model. Nat Hazards 85:1877–1891. https://doi.org/10.1007/s11069-016-2670-9
Wang J, Zhang X (2008) Downscaling and projection of winter extreme daily precipitation over North America. J Clim 21:923–937. https://doi.org/10.1175/2007JCLI1671.1
Watt E, Marsalek J (2013) Critical review of the evolution of the design storm event concept. Can J Civ Eng 40:105–113. https://doi.org/10.1139/cjce-2011-0594
Wehner MF (2013) Very extreme seasonal precipitation in the NARCCAP ensemble: model performance and projections. Clim Dyn 40:59–80. https://doi.org/10.1007/s00382-012-1393-1
Westra S, Fowler HJ, Evans JP et al (2014) Future changes to the intensity and frequency of short-duration extreme rainfall. Rev Geophys 52:522–555. https://doi.org/10.1002/2014RG000464
Willems P (2013) Revision of urban drainage design rules after assessment of climate change impacts on precipitation extremes at Uccle, Belgium. J Hydrol 496:166–177. https://doi.org/10.1016/j.jhydrol.2013.05.037
Yilmaz AG, Perera BJC (2014) Extreme rainfall nonstationarity investigation and intensity–frequency–duration relationship. J Hydrol Eng. https://doi.org/10.1061/(ASCE)HE.1943-5584.0000878
Zhang X, Wan H, Zwiers FW et al (2013) Attributing intensification of precipitation extremes to human influence. Geophys Res Lett 40:5252–5257. https://doi.org/10.1002/grl.51010
Acknowledgements
The India Meteorological Department (IMD) is acknowledged for providing hourly rainfall data. This research did not receive any specific grant from the funding agencies in the public, commercial, or not for profit sectors. This research received a seed grant from TERI School of Advanced Studies, New Delhi. The authors wish to thank their colleague Dr. Sherly MA for going through the manuscript.
Author information
Authors and Affiliations
Contributions
The research methodology was designed by Prof. Prateek Sharma, Ms. RRC carried out the research and data analysis and wrote the manuscript. Professor PS supervised the research and data analysis and refined the ideas and contributed in finalizing the paper.
Corresponding author
Ethics declarations
Conflict of interest
The authors would like to report no conflict of interest. The study is a part of the first author’s Ph.D. research work.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Chaudhuri, R.R., Sharma, P. Addressing uncertainty in extreme rainfall intensity for semi-arid urban regions: case study of Delhi, India. Nat Hazards 104, 2307–2324 (2020). https://doi.org/10.1007/s11069-020-04273-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11069-020-04273-5