
Abstract
The multi-weighted coupled neural networks (MWCNNs) models with and without coupling delays are investigated in this paper. Firstly, the finite-time anti-synchronization of MWCNNs with fixed topology and switching topology is analyzed respectively by utilizing Lyapunov functional approach as well as some inequality techniques, and several anti-synchronization criteria are put forward for the considered networks. Furthermore, when the parameter uncertainties appear in MWCNNs, some conditions for ensuring robust finite-time anti-synchronization are obtained. Similarly, we also consider the finite-time anti-synchronization and robust finite-time anti-synchronization for MWCNNs with coupling delays under fixed and switched topologies respectively. Lastly, two numerical examples with simulations are provided to confirm the effectiveness of these derived results.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, neural networks (NNs) have become a hot topic because of their widespread applications, especially in optimization, associate memory, pattern recognition and so on [1,2,3,4,5,6,7]. Actually, these applications are heavily dependent on their dynamical behaviors. Hence, a lot of meaningful and important research results have been reported on stability and passivity of NNs [8,9,10,11,12,13]. Zhang et al. [8] studied the stability for a class of discrete-time NNs with time-varying delay via an extended reciprocally convex matrix inequality. The authors in [9] discussed the stability of complex-valued memristive recurrent NNs. By utilizing Lyapunov functional approach and some inequality techniques, the passivity and stability problems for NNs with reaction–diffusion terms were considered in [10].
As a particular sort of complex networks, coupled NNs (CNNs) are composed of many NNs which interact with each other. As we all known, synchronization is one of the most significant dynamic properties in CNNs, which has been applied in many areas such as image processing, secure communication [14, 15]. Therefore, it is of great significance to investigate the synchronization of CNNs [16,17,18,19,20,21,22]. Wang et al. [18] studied the local synchronization problem for a sort of Markovian nonlinearly CNNs by applying the Lyapunov–Krasovskii functional as well as free-matrix-based integral inequality. Based on Lyapunov functions, Halanay inequality and stochastic analysis technique, the exponential synchronization problem of CNNs with time-varying delay was investigated in [19]. Several criteria for ensuring exponential synchronization for markovian stochastic CNNs were carried out via adaptive feedback control in [20]. The work in [22] analyzed the exponential synchronization and passivity of CNNs with reaction–diffusion terms by adopting appropriate pinning controllers. What is noteworthy is that anti-synchronization is also a fascinating phenomenon in the real world, which widely exists in memristive recurrent NNs, periodic oscillators, and so forth. Moreover, up to now, anti-synchronization has been successfully applied in many fields, for instance, image processing, information science and so on. Hence, it is highly meaningful to study anti-synchronization [23,24,25,26,27,28]. Some conditions for guaranteeing anti-synchronization of CNNs with mixed time-varying delays were set up via randomly occurring control in [25]. Liu et al. [26] devoted themselves to the anti-synchronization for the considered complex-valued memristive NNs by employing suitable Lyapunov functional and some inequality techniques. In [28], the anti-synchronization problem of a memristor-based bidirectional associate memory NN was studied by utilizing a robust feedback controller with an appropriate gain control matrix.
In many practical applications, it is usually required to realize synchronization within a limited time interval. Accordingly, a large number of literatures on finite-time synchronization have been reported [29,30,31,32,33,34,35,36,37,38,39,40]. In [29], several conditions for ensuring the finite-time synchronization of CNNs with time-varying delays were derived by designing a stochastic multiple Lyapunov–Krasovskii function and using weighted integral inequality. Some discontinuous or continuous controllers were constructed for the finite-time synchronization problem of switched CNNs in [30]. Sun et al. [32] investigated the finite-time synchronization for two complex-variable chaotic systems with unknown parameters via nonsingular terminal sliding mode control. However, only a few results have been obtained about finite-time anti-synchronizaton up to now [41, 42]. In [41], the finite-time anti-synchronization for a class of time-varying delayed NNs was studied via feedback control with intermittent adjustment. The authors proposed some finite-time anti-synchronization criteria for memristive NNs by designing a nonlinear controller in [42]. As far as we know, a great many of existing networks can be described more accurately by multi-weighted complex dynamical networks (MWCDNs), for instance, transportation networks, social networks, communication networks and so on. Therefore, it is of great significance to study MWCDNs [43]. Qiu et al. [43] proposed several finite-time synchronization conditions for MWCDNs with and without coupling delays by means of Lyapunov functional approach and state feedback controllers. However, there are only a few results reported on the finite-time synchronization of MWCNNs [44]. In [44], several novel criteria for guaranteeing finite-time synchronization of MWCNNs with and without coupling delays were provided by exploiting new definitions of finite-time synchronization and designing appropriate controllers. It is a pity that the finite-time anti-synchronization of MWCNNs has not yet been considered in existing research results.
As is well known, the connection topology of most of networks mentioned above is always supposed to be fixed. Nevertheless, in practical applications, this requirement is very strict because of the impacts of limited communications and external disturbances. Therefore, more and more researchers devoted themselves to studying the synchronization of NNs with switching topology [45,46,47,48]. In [46], the authors investigated the finite-time synchronization of a sort of uncertain CNNs with switching topology by constructing appropriate Lyapunov-like functionals and using the average dwell time technique. The work in [47] proposed some conditions for guaranteeing pinning synchronization of directed networks with switching topologies by employing a multiple Lyapunov functions approach. Based on Lyapunov functional approach and some inequality techniques, Qin et al. [48] studied the synchronization and \(\mathcal {H}_\infty \) synchronization of MWCDNs with fixed and switching topologies. However, there is no research results reported on the finite-time anti-synchronization for MWCNNs with switching topology until now.
On the other hand, some uncertain factors may be occurred in NNs due to the existence of environmental noises and modeling errors, which might cause the exact parameter values of NNs could not be obtained. Therefore, it is important to consider the robust synchronization of CNNs which consisting of several identical uncertain NNs [49,50,51,52]. In [49], the authors investigated the robust synchronization of fractional-order CNNs by utilizing pinning control strategies. The robust synchronization problem for delayed CNNs with uncertain parameters was studied by intermittent pinning control in [50]. By using inequality techniques and constructing appropriate Lyapunov functional, Qin et al. [51] discussed the robust synchronization and \(\mathcal {H}_\infty \) synchronization of MWCDNs with uncertain parameters. To our best knowledge, the robust finite-time anti-synchronization for MWCNNs with uncertain parameters has never been discussed.
On the basis of the above discussion, we study the finite-time anti-synchronization and robust finite-time anti-synchronization of MWCNNs with fixed and switching topologies in this paper. Firstly, we present two MWCNN models. The first one is with constant coupling, and the second MWCNN is with delayed coupling. Then, several finite-time anti-synchronization criteria for these considered networks with fixed as well as switching topologies are derived respectively. Furthermore, some sufficient conditions for ensuring robust finite-time anti-synchronization of MWCNNs with fixed and switching topologies are also established.
In view of the above-mentioned discussion, the principal objective of this paper is to study the finite-time anti-synchronization of multi-weighted coupled neural networks (MWCNNs). The main contribution of this paper can be summarized as follows.
- (1)
The finite-time anti-synchronization of MWCNNs with fixed and switching topologies is studied and several criteria are put forward by designing a suitable controller and constructing an appropriate Lyapunov functional.
- (2)
Some conditions for guaranteeing the robust finite-time anti-synchronization of MWCNNs with uncertain parameters under fixed and switching topologies are established respectively.
- (3)
For the delayed MWCNNs, the finite-time anti-synchronization and robust finite-time anti-synchronization conditions are also derived similarly.
The outline of this paper is organized as follows. Several lemmas needed to be used throughout this paper are provided in Sect. 2. Section 3 is devoted to analyzing finite-time anti-synchronization and the robust finite-time anti-synchronization for MWCNNs with fixed and switching topologies, respectively. In Sect. 4, the network model of MWCNNs with coupling delays is introduced, and then the finite-time anti-synchronization and the robust finite-time anti-synchronization for this kind of MWCNNs with fixed and switching topologies are investigated. Two simulation examples are presented in Sect. 5 to verify the effectiveness of the obtained theoretical results. Finally, this paper is concluded in Sect. 6.
2 Preliminaries
\(0\geqslant {\chi }\in \mathbb {R}^{n\times {n}}~(0\leqslant {\chi }\in \mathbb {R}^{n\times {n}})\) symbols the matrix \(\chi \) is semi-negative (semi-positive) definite and symmetric, \(0>{\chi }\in \mathbb {R}^{n\times {n}}~(0<{\chi }\in \mathbb {R}^{n\times {n}})\) shows that the matrix \(\chi \) is negative (positive) definite and symmetric. \(\lambda _M(\cdot )\) and \(\lambda _m(\cdot )\) respectively signify the maximum and minimum eigenvalues of the corresponding matrix. In addition, for \(e(t)=(e_1(t),e_2(t),\ldots ,e_n(t))^T\in \mathbb {R}^{n},\) we have \(\Vert e(t)\Vert _2=\bigg (\sum \nolimits _{\iota =1}^{n}e^2_\iota (t)\bigg )^{\frac{1}{2}}\).
Lemma 1
(see [53]) Suppose that a continuous and positive-definite function H(t) meets the following inequality:
where \(0<\mu \in \mathbb {R}\) and \(0<\omega <1\) are constants. Then,
and
with T given by
Lemma 2
(see [54]) For \(\nu _\xi \in \mathbb {R}\), \(\xi =1,2,\ldots ,n\), \(0<k\leqslant 1\), then
3 Finite-Time Anti-synchronization of MWCNNs
3.1 Anti-synchronization in Finite Time for MWCNNs
3.1.1 Anti-synchronization in Finite Time for MWCNNs with Fixed Topology
Consider the following MWCNNs with fixed topology:
where \({Y_\iota }(t)=(Y_{\iota 1}(t), Y_{\iota 2}(t), \ldots , Y_{\iota n}(t))^T\in \mathbb {R}^{n}\) is the state vector of the \(\iota \)th node; \(A=\mathrm {diag}(a_1, a_2, \ldots , a_n)\in \mathbb {R}^{n\times n}>0, D= (d_{\iota j})_{n\times n}\in \mathbb {R}^{n\times n}\) symbols a constant matrix; \(g(Y_\iota (t))=(g_1(Y_{\iota 1}{(t)}), g_2(Y_{\iota 2}{(t)}), \ldots , g_n(Y_{\iota n}{(t)}))^T\in \mathbb {R}^{n}\) and \(\mathbb {R}\ni c_s>0\) represents coupling strength for the sth coupling form; \(u_\iota (t)\in \mathbb {R}^n\) means the control input; \(\varGamma _s\in \mathbb {R}^{n\times {n}}\) is the inner coupling matrix of the sth coupling form; \(G^s=~(G^s_{\iota j})_{\kappa \times {\kappa }}\in \mathbb {R}^{\kappa \times {\kappa }}\) expresses coupling weight between nodes in the sth coupling form, where \(G^s_{\iota j}\) is defined as follows: \(G^s_{\iota j}=G^s_{j\iota }>0\) if and only if there exists a connection between node \(\iota \) and node j for the sth coupling form; if not, \(G^s_{\iota j}=G^s_{j\iota }=0~(\iota \ne {j})\); and
where \(s=1, 2, \ldots , m\).
Assumption 1
The function \(g_k(\cdot )~(k=1,2,\ldots ,n)\) satisfies
for any \(\alpha _{1},\alpha _{2}\in \mathbb {R}\), where \(0<\theta _{k}\in \mathbb {R}\). Take \(\varTheta =\mathrm {diag}(\theta _{1}^2, \theta _{2}^2, \ldots , \theta _{n}^2)\in \mathbb {R}^{n\times {n}}\).
Suppose \(Y_0(t)=(Y_{01}(t), Y_{02}(t), \ldots , Y_{0n}(t))^T\in ~\mathbb {R}^n\) is an arbitrary solution for the network (1), then
Definition 1
For all \(\iota =1,2,\ldots ,\kappa \), if there exists a constant \(T>0\) such that
then the network (1) is called to be anti-synchronized in finite time.
Design the following controller for the network (1):
where \(W_\iota \in \mathbb {R}^{n\times n}\), \(0<a<1\), \(\text {sign}(Y_\iota (t)+Y_0(t))=\text {diag}(\text {sign}(Y_{\iota 1}(t)+Y_{01}(t)),\text {sign}(Y_{\iota 2}(t)+Y_{02}(t)),\ldots ,\text {sign}(Y_{\iota n}(t)+Y_{0n}(t)))\), \(|Y_\iota (t)+Y_0(t)|^a=(|Y_{\iota 1}(t)+Y_{01}(t)|^a,|Y_{\iota 2}(t)+Y_{02}(t)|^a,\ldots ,|Y_{\iota n}(t)+Y_{0n}(t)|^a)^T\), \(0<\eta \in \mathbb {R}\), \(0<P=\text {diag}(p_1,p_2,\ldots ,p_n)\in \mathbb {R}^{n\times n}\), \(P^{\frac{a-1}{2}}=\mathrm {diag}(p^{\frac{a-1}{2}}_1,p^{\frac{a-1}{2}}_2,\ldots ,p_n^{\frac{a-1}{2}})\). Then, we have
Take \(e_\iota (t)=Y_\iota (t)+Y_0(t)\). Then, one can get
Theorem 1
If there exist matrices \(0<P=\mathrm {diag}(p_1,p_2,\ldots ,p_n)\in \mathbb {R}^{n\times {n}}\) and \(W=\mathrm {diag}(W_1,W_2,\ldots ,W_\kappa )\in \mathbb {R}^{n\kappa \times {n\kappa }}\) such that
where \(K_1=I_\kappa \otimes (-PA-AP+PDD^TP+\varTheta ),~K_2=-(I_\kappa \otimes P)W-W^T (I_\kappa \otimes P)\), then the network (1) is said to be finite-timely anti-synchronized under the controller (3). What’s more, the settling time of anti-synchronization T satisfies \(T\leqslant T_1=\frac{(V_1(0))^\frac{1-a}{2}}{\eta (1-a)}.\)
Proof
Define the following Lyapunov functional for network (4):
Then, one has
Obviously,
From (7), we can obtain
where \(e(t)=(e^T_1(t), e^T_2(t),\ldots ,e^T_\kappa (t))^T\). According to Lemma 2, we can easily obtain
From (5), (8), (9) and Lemma 2, we can get
By Lemma 1, we can get \(V_1(t)=0,~t>T_1\) with \(T_1=\frac{(V_1(0))^\frac{1-a}{2}}{\eta (1-a)}\).
On the other hand,
where \(\lambda _m(P)>0\).
From (10), we obtain \(\Vert e_\iota (t)\Vert _2=0,~t>T_1\), where \(\iota =1,2,\ldots ,\kappa \). Therefore, the network (1) achieves finite-time anti-synchronization under the controller (3). The proof is completed. \(\square \)
3.1.2 Anti-synchronization in Finite Time for MWCNNs with Switching Topology
In this section, we consider the following MWCNNs with switching topology:
where \(Y_\iota (t),~g(\cdot ),~A,~D,~u_\iota (t),~c_s,~\varGamma _s(s=1,2,\ldots ,m)\) are defined similarly as those in Sect. 3.1.1, \(\omega (t):[0,\infty )\rightarrow I=\{1,2,\ldots ,i\}\) symbols switching signal. For each \(\varsigma \in I,~G^{s,\varsigma }=(G^{s,\varsigma }_{\iota j})_{\kappa \times \kappa }\) represents the coupling configuration matrix in the sth coupling form for the \(\varsigma \)th topology, which satisfies \(G^{s,\varsigma }_{\iota j}=G^{s,\varsigma }_{j\iota }>0\) if nodes \(\iota \) and j are connected for the \(\varsigma \)th topology; otherwise, \(G^{s,\varsigma }_{\iota j}=G^{s,\varsigma }_{j\iota }=0~(\iota \ne j)\); and
For the network (11), design the same controller as (3). Then, we can obtain
Let \(e_\iota (t)=Y_\iota (t)+Y_0(t)\), then
Theorem 2
If there exist matrices \(0<P=\mathrm {diag}(p_1,p_2,\ldots ,p_n)\in \mathbb {R}^{n\times {n}}\) and \(W=\mathrm {diag}(W_1,W_2,\ldots ,W_\kappa )\in \mathbb {R}^{n\kappa \times {n\kappa }}\) such that
where \(\varsigma =1,2,\ldots ,i,~K_1=I_\kappa \otimes {(-PA-AP+PDD^TP+\varTheta })~and~K_2=-(I_\kappa \otimes P)W-W^T (I_\kappa \otimes P)\), then the network (11) is finite-timely anti-synchronized under the controller (3). Moreover, the settling time of anti-synchronization T satisfies \(T\leqslant T_1=\frac{(V_1(0))^\frac{1-a}{2}}{\eta (1-a)}.\)
Proof
Select the same Lyapunov functional as (6) for the network (12). Then, we have
It follows from (9), (13) and Lemma 2 that
Similar to the proof of Theorem 1, we can derive \(\Vert e_\iota (t)\Vert _2=0,~t>T_1\), where \(\iota =1,2,\ldots ,\kappa \). Thus, the network (11) reaches finite-time anti-synchronization under the controller (3). The proof is completed. \(\square \)
3.2 Robust Anti-synchronization in Finite Time for MWCNNs
3.2.1 Robust Anti-synchronization in Finite Time for MWCNNs with Fixed Topology
During the modeling process of CNNs, the existence of environmental noise, limitations of equipment and external interference may lead to the parameters varying within bounded ranges in some circumstances. Therefore, we consider a MWCNNs with parameteric uncertainties consisting of \(\kappa \) identical nodes in this section which can be described as
where \(Y_\iota (t),~g(\cdot ),~c_s,~G^s_{\iota j},~\varGamma _s,~s=1,2,\ldots ,m,~u_\iota (t)\) have the same meanings as those in Sect. 3.1.1, and the parameters A and D change in the following given ranges:
For convenience, we define
Definition 2
For all \(\iota =1,2,\ldots ,\kappa ,~A\in A_I\) and \(D\in D_I\), if there exists a constant \(T>0\) satisifying
then the network (14) with the parameter ranges defined by (15) is said to be robustly anti-synchronized in finite time.
For the network (14), design the same controller as (3). Then, we can obtain
Let \(e_\iota (t)=Y_\iota (t)+Y_0(t)\), then
where A and D belong to the parameter ranges defined by (15).
Theorem 3
If there exist matrices \(0<P=\mathrm {diag}(p_1,p_2,\ldots ,p_n)\in \mathbb {R}^{n\times {n}}\) and \(W=\mathrm {diag}(W_1,W_2,\ldots ,W_\kappa )\in \mathbb {R}^{n\kappa \times {n\kappa }}\) such that
where \(K_2=-\,(I_\kappa \otimes P)W-W^T (I_\kappa \otimes P),~K_3=I_\kappa \otimes {(-PA^{-}-A^{-}P+\varrho _DP^2+\varTheta }),~\varrho _D=\sum _{r=1}^{n}\sum _{j=1}^{n}{\tilde{d}_{r j}}^2\), then the network (14) with the parameter ranges defined by (15) is robust finite-timely anti-synchronized under the controller (3). What’s more, the settling time of anti-synchronization T satisfies \(T\leqslant T_1=\frac{(V_1(0))^\frac{1-a}{2}}{\eta (1-a)}.\)
Proof
Define the same Lyapunov functional as (6) for network (16). Then, one has
Obviously,
From (18), we can obtain
It follows from (9), (17) and Lemma 2 that
Similar to the proof of Theorem 1, we can derive \(\Vert e_\iota (t)\Vert _2=0,~t>T_1\), where \(\iota =1,2,\ldots ,\kappa \). Hence, the network (14) with the parameter ranges defined by (15) achieves robust finite-time anti-synchronization under the controller (3). The proof is completed. \(\square \)
3.2.2 Robust Anti-synchronization in Finite Time for MWCNNs with Switching Topology
In this subsection, we consider the switched MWCNNs with parameter uncertainties:
where \(Y_\iota (t),~g(\cdot ),~u_\iota (t),~c_s,~\varGamma _s(s=1,2,\ldots ,m)\) are defined similarly as those in Sect. 3.1.1, \(G^{s,\varsigma }_{\iota j}\) has the same definition as in Sect. 3.1.2, and A, D belong to the parameter ranges given by (15).
For the network (20), design the same controller as (3). Then, we can obtain
Let \(e_\iota (t)=Y_\iota (t)+Y_0(t)\), then
in which the parameters A and D change in some given parameter ranges defined by (15).
Theorem 4
If there exist matrices \(0<P=\mathrm {diag}(p_1,p_2,\ldots ,p_n)\in \mathbb {R}^{n\times {n}}\) and \(W=\mathrm {diag}(W_1,W_2,\ldots ,W_\kappa )\in \mathbb {R}^{n\kappa \times {n\kappa }}\) such that
where \(\varsigma =1,2,\ldots ,i,~K_3=I_\kappa \otimes {(-PA^{-}-A^{-}P+\varrho _DP^2+\varTheta }),~K_2=-(I_\kappa \otimes P)W-W^T (I_\kappa \otimes P),~\varrho _D=\sum _{r=1}^{n}\sum _{j=1}^{n}\tilde{d}_{r j}^2\), then the network (20) with the parameter ranges defined by (15) is robust finite-timely anti-synchronized under the controller (3). Moreover, the settling time of anti-synchronization T satisfies \(T\leqslant T_1=\frac{(V_1(0))^\frac{1-a}{2}}{\eta (1-a)}.\)
Proof
Select the same Lyapunov functional as (6) for the network (21). Then, one has
It follows from (9), (22) and Lemma 2 that
Similar to the proof of Theorem 1, we can derive \(\Vert e_\iota (t)\Vert _2=0,~t>T_1\), where \(\iota =1,2,\ldots ,\kappa \). Therefore, the network (20) with the parameter ranges defined by (15) achieves robust finite-time anti-synchronization under the controller (3). The proof is completed. \(\square \)
Remark 1
In recent years, some meaningful research results have been reported on the dynamical behaviors of Markovian jump systems [55,56,57,58,59,60,61]. Shen et al. [56] investigated the finite-time event-triggered \(H_{\infty }\) control problem for Takagi-Sugeno Markov jump fuzzy systems. As is well known, Markov jump systems can be used to model some real-life systems experiencing random changes in their parameters or structures. Therefore, it would be very interesting to apply a Markov process into the MWCNNs considered in our paper and investigate the finite-time anti-synchronization of MWCNNs with Markovian jump topology. This would be a meaningful problem for our future research.
4 Finite-Time Anti-synchronization of MWCNNs with Coupling Delays
4.1 Anti-synchronization in Finite Time for Delayed MWCNNs
4.1.1 Anti-synchronization in Finite Time for Delayed MWCNNs with Fixed Topology
In this section, we consider the following network model of MWCNNs with coupling delays:
where \(\iota =1, 2, \ldots , \kappa ,~Y_\iota (t),~g(\cdot ),~A,~D,~c_s,~G^s_{\iota j},~\varGamma _s,~u_\iota (t)\) are defined similarly as those in Sect. 3.1.1, \(\tau _s(t)\) is the time-varying delay with \(0\leqslant ~\tau _s(t)\leqslant ~\tau \), \(s= 1, 2, \ldots ,m\).
Construct the controller for the network (23) as follows:
where \(0<Q^s_\iota \in \mathbb {R}^{n\times n},~Q_s=\mathrm {diag}(Q^s_1,Q^s_2,\ldots ,Q^s_\kappa ),~s=1,2,\ldots ,m\), \(W_\iota ,~a,~P,~\eta ,~\mathrm {sign}(Y_\iota (t)+Y_0(t)),~|Y_\iota (t)+Y_0(t)|^a\) have the same meanings as in (3). Then, we have
Let \(e_\iota (t)=Y_\iota (t)+Y_0(t)\). Obviously, we can obtain
where \(\iota = 1, 2, \ldots , \kappa \).
Theorem 5
Suppose \(\dot{\tau }_s(t)\leqslant \gamma _s<1\). The network (23) realizes finite-time anti-synchronization under the controller (24) if there exist matrices \(0<P=\mathrm {diag}(p_1,p_2,\ldots ,p_n)\in \mathbb {R}^{n\times {n}}\), \(W=\mathrm {diag}(W_1,W_2,\ldots ,W_\kappa )\in \mathbb {R}^{n\kappa \times {n\kappa }}\) and \(0<Q_s=\mathrm {diag}(Q^s_1,Q^s_2,\ldots ,Q^s_\kappa )\in \mathbb {R}^{n\kappa \times n\kappa }\), such that
where \(K_1=I_\kappa \otimes (-PA-AP+PDD^TP+\varTheta ),~K_2=-(I_\kappa \otimes P)W-W^T (I_\kappa \otimes P),~F_s=G^s\otimes (\varGamma ^T_sP)\). In addition, the settling time of anti-synchronization T satisfies \(T\leqslant T_2=\frac{(V_2(0))^\frac{1-a}{2}}{\eta (1-a)}.\)
Proof
Construct a Lyapunov functional for network (25):
Then,
where \(e(t-\tau _s(t))=(e^T_1(t-\tau _s(t)),e^T_2(t-\tau _s(t)),\ldots ,e^T_\kappa (t-\tau _s(t)))^T\). Obviously,
From (7), (9), (26), (28) and Lemma 2, we can obtain
Similar to the proof of Theorem 1, it is easy to obtain \(\Vert e_\iota (t)\Vert _2=0,~\iota =1,2,\ldots ,\kappa ,~t>T_2\). Obviously, the network (23) is finite-time anti-synchronization. The proof is completed. \(\square \)
4.1.2 Anti-synchronization in Finite Time for Delayed MWCNNs with Switching Topology
Describe the network model of MWCNNs with coupling delays and switching topology in this section as follows:
where \(\iota =1, 2, \ldots , \kappa ,~Y_\iota (t),~g(\cdot ),~A,~D,~c_s,~u_\iota (t),~\varGamma _s\) represent the same definitions as in Sect. 3.1.1, \(\tau _s(t)\) is the time-varying delay as that in Sect. 4.1.1, and \(G^{s,\varsigma }_{\iota j}\) has the same meaning as that in Sect. 3.1.2.
Construct the same controller as (24) for the network (29). Then, one has
Let \(e_\iota (t)=Y_\iota (t)+Y_0(t)\). Then, we have
where \(\iota = 1, 2, \ldots , \kappa \).
Theorem 6
Suppose \(\dot{\tau }_s(t)\leqslant \gamma _s<1\). The network (29) realizes finite-time anti-synchronization under the controller (24) if there exist matrices \(0<P=\mathrm {diag}(p_1,p_2,\ldots ,p_n)\in \mathbb {R}^{n\times {n}}\), \(W=\mathrm {diag}(W_1,W_2,\ldots ,W_\kappa )\in \mathbb {R}^{n\kappa \times {n\kappa }}\) and \(0<Q_s=\mathrm {diag}(Q^s_1,Q^s_2,\ldots ,Q^s_\kappa )\in \mathbb {R}^{n\kappa \times n\kappa }\), such that
where \(\varsigma =1,2,\ldots ,i,~K_1=I_\kappa \otimes (-PA-AP+PDD^TP+\varTheta ),~K_2=-(I_\kappa \otimes P)W-W^T (I_\kappa \otimes P)~and~F_{s,\varsigma }=G^{s,\varsigma }\otimes (\varGamma ^T_s P)\). What’s more, the settling time of anti-synchronization T satisfies \(T\leqslant T_2=\frac{(V_2(0))^\frac{1-a}{2}}{\eta (1-a)}.\)
Proof
Construct the same Lyapunov functional as (24) for network (30). Then,
Similar to the proof of Theorem 1, it is easy to obtain \(\Vert e_\iota (t)\Vert _2=0,~\iota =1,2,\ldots ,\kappa ,~t>T_2\). Obviously, the network (29) achieves finite-time anti-synchronization. The proof is completed. \(\square \)
4.2 Robust Anti-synchronization in Finite Time for Delayed MWCNNs
4.2.1 Robust Anti-synchronization in Finite Time for Delayed MWCNNs with Fixed Topology
The MWCNNs model with coupling delays and parameter uncertainties is described by:
where \(\iota =1, 2, \ldots , \kappa ,~Y_\iota (t),~g(\cdot ),~c_s,~G^s_{\iota j},~\varGamma _s,~u_\iota (t)\) are defined similarly as those in Sect. 3.1.1, A, D are intervalized as those in (15), \(\tau _s(t)\) is the time-varying delay as that in Sect. 4.1.1.
Design the same controller for the network (32) as (24). Then,
Let \(e_\iota (t)=Y_\iota (t)+Y_0(t)\). Then, we have
where \(\iota = 1, 2, \ldots , \kappa \), A and D are uncertain parameters which belong to the ranges given in (15).
Theorem 7
Suppose \(\dot{\tau }_s(t)\leqslant \gamma _s<1\). The network (32) with the parameter ranges defined by (15) achieves robust finite-time anti-synchronization under the controller (24) if there exist matrices \(0<P=\mathrm {diag}(p_1,p_2,\ldots ,p_n)\in \mathbb {R}^{n\times {n}}\), \(W=\mathrm {diag}(W_1,W_2,\ldots ,W_\kappa )\in \mathbb {R}^{n\kappa \times {n\kappa }}\) and \(0<Q_s=\mathrm {diag}(Q^s_1,Q^s_2,\ldots ,Q^s_\kappa )\in \mathbb {R}^{n\kappa \times n\kappa }\), such that
where \(K_3=I_\kappa \otimes {(-PA^{-}-A^{-}P+\varrho _DP^2+\varTheta }),~\varrho _D=\sum _{r=1}^{n}\sum _{j=1}^{n}{\tilde{d}_{r j}}^2,~K_2=-(I_\kappa \otimes P)W-W^T (I_\kappa \otimes P)\), \(F_s=G^s\otimes (\varGamma ^T_sP)\). In addition, the settling time of anti-synchronization T satisfies \(T\leqslant T_2=\frac{(V_2(0))^\frac{1-a}{2}}{\eta (1-a)}.\)
Proof
The Lyapunov functional is constructed similarly as that in Theorem 5 for network (33). Then,
Similar to the proof of Theorem 1, it is easy to obtain \(\Vert e_\iota (t)\Vert _2=0,~\iota =1,2,\ldots ,\kappa ,~t>T_2\). Obviously, the network (32) with the parameter ranges defined by (15) achieves robust finite-time anti-synchronization under the controller (24). The proof is completed. \(\square \)
4.2.2 Robust Anti-synchronization in Finite Time for Delayed MWCNNs with Switching Topology
In this subsection, the network model of delayed MWCNNs with the parameter uncertainties and switching topology is described by:
where \(\iota =1, 2, \ldots , \kappa ,~Y_\iota (t),~g(\cdot ),~c_s,~u_\iota (t),~\varGamma _s\) represent the same definitions as those in Sect. 3.1.1, A, D change in some given precision described by (15), \(\tau _s(t)\) is the time-varying delay as that in Sect. 4.1.1, and \(G^{s,\varsigma }_{\iota j}\) has the same meaning as that in Sect. 3.1.2.
Construct the same controller as (24) for the network (35). Then,
Let \(e_\iota (t)=Y_\iota (t)+Y_0(t)\). Then, we have
where \(\iota = 1, 2, \ldots , \kappa \), A and D are uncertain parameters which belong to the ranges given in (15).
Theorem 8
Suppose \(\dot{\tau }_s(t)\leqslant \gamma _s<1\). The network (35) with the parameter ranges defined by (15) achieves robust finite-time anti-synchronization under the controller (24) if there exist matrices \(0<P=\mathrm {diag}(p_1,p_2,\ldots ,p_n)\in \mathbb {R}^{n\times {n}}\), \(W=\mathrm {diag}(W_1,W_2,\ldots ,W_\kappa )\in \mathbb {R}^{n\kappa \times {n\kappa }}\) and \(0<Q_s=\mathrm {diag}(Q^s_1,Q^s_2,\ldots ,Q^s_\kappa )\in \mathbb {R}^{n\kappa \times n\kappa }\), such that
where \(\varsigma =1,2,\ldots ,i,~K_3=I_\kappa \otimes {(-PA^{-}-A^{-}P+\varrho _DP^2+\varTheta }),~K_2=-(I_\kappa \otimes P)W-W^T (I_\kappa \otimes P),~\varrho _D=\sum _{r=1}^{n}\sum _{j=1}^{n}\tilde{d}_{r j}^2,~F_{s,\varsigma }=G^{s,\varsigma }\otimes (\varGamma ^T_s P)\). What’s more, the settling time of anti-synchronization T satisfies \(T\leqslant T_2=\frac{(V_2(0))^\frac{1-a}{2}}{\eta (1-a)}.\)
Proof
Construct the same Lyapunov functional as in Theorem 5 for network (36). Then,
Similar to the proof of Theorem 1, it is easy to obtain \(\Vert e_\iota (t)\Vert _2=0,~\iota =1,2,\ldots ,\kappa ,~t>T_2\). Obviously, the network (35) with the parameter ranges defined by (15) achieves robust finite-time anti-synchronization under the controller (24). The proof is completed. \(\square \)
Remark 2
In this paper, by designing suitable state feedback controllers, several sufficient conditions which guarantee the finite-time anti-synchronization of MWCNNs with and without coupling delays are obtained. To the best of knowledge, this is the first paper toward to studying anti-synchronization for MWCNNs in finite time. Recently, a few scholars established some novel finite-time synchronization criteria for complex networks via intermittent feedback control scheme [35, 36]. Incorporating this new control approach and techniques into the research on finite-time anti-synchronization of MWCNNs is a very interesting and challenging problem, which would become one of research topics of our future work.
5 Numerical Examples
Example 4.1
Consider the switched MWCNNs with parameter uncertainties as follows:
where \(\iota =1,2,\ldots ,6,~\varsigma =1,2\), \(g_k(\sigma )=\frac{|\sigma +1|-|\sigma -1|}{4}~(k=1,2,3)\), \(G^{1,1}\) and \(G^{1,2}\) are two possible topologies which are switched as \(G^{1,1}\rightarrow G^{1,2}\rightarrow G^{1,1}\rightarrow G^{1,2}\rightarrow \cdots \), and each graph is active for 1s, \(G^{2,1},~G^{2,2},~G^{3,1},~G^{3,2}\) are switched in the same way. The inner coupling matrices \(\varGamma _1,~\varGamma _2,~\varGamma _3\) and the coupling matrices \(G^{1,1}=(G^{1,1}_{\iota j})_{6\times 6},~G^{1,2}=(G^{1,2}_{\iota j})_{6\times 6},~G^{2,1}=(G^{2,1}_{\iota j})_{6\times 6},~G^{2,2}=(G^{2,2}_{\iota j})_{6\times 6},~G^{3,1}=(G^{3,1}_{\iota j})_{6\times 6},~G^{3,2}=(G^{3,2}_{\iota j})_{6\times 6}\) are chosen as, respectively
The parameters \(A=\mathrm {diag}(a_1,a_2,\ldots ,a_n)\), \(D=(d_{rj})_{n\times n}\) in the network (38) can be changed in the following given precisions:
Obviously, \(g_k(\cdot )~(k=1,2,3)\) satisfies \(\mathbf {Assumption~1}\) with \(\theta _k=0.5\). Take \(W=\mathrm {diag}(0.2I_3,0.4I_3,0.3I_3,0.6I_3,0.7I_3,0.5I_3)\). The following matrix P satisfying (22) can be computed by utilizing MATLAB Toolbox:
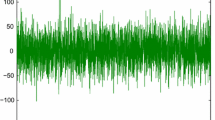
According to Theorem 4, the network (38) with the parameter ranges defined by (39) achieves robust finite-time anti-synchronization under the controller (3) and the time estimation of achieving anti-synchronization is \(T_1=9.32\). The simulation result is displayed in Fig. 1.
Example 4.2
Consider the following switched MWCNNs with the parameter uncertainties and coupling delays:

\(\Vert e_{\iota }(t)\Vert ,~\iota = 1, 2,\ldots ,6\)
where \(\iota =1,2,\ldots ,6,~\varsigma =1,2\), \(g_k(\sigma )=\frac{|\sigma +1|-|\sigma -1|}{8}~(k=1,2,3)\), \(\tau _1(t)=\frac{1}{10}-\frac{1}{30}e^{-t},~\tau _2(t)=\frac{1}{10}-\frac{1}{40}e^{-t},~\tau _3(t)=\frac{1}{10}-\frac{1}{50}e^{-t},~\tau =\frac{1}{10},~\gamma _1=\frac{1}{30},~\gamma _2=\frac{1}{40},~\gamma _3=\frac{1}{50}\), \(G^{1,1}\) and \(G^{1,2}\) are two possible topologies which are switched as \(G^{1,1}\rightarrow G^{1,2}\rightarrow G^{1,1}\rightarrow G^{1,2}\rightarrow \cdots \), and \(G^{2,1},~G^{2,2},~G^{3,1},~G^{3,2}\) are switched in the same way with activation time of 1s for each graph. The inner coupling matrices \(\varGamma _1,~\varGamma _2,~\varGamma _3\) and the coupling matrices \(G^{1,1}=(G^{1,1}_{\iota j})_{6\times 6},~G^{1,2}=(G^{1,2}_{\iota j})_{6\times 6},~G^{2,1}=(G^{2,1}_{\iota j})_{6\times 6},~G^{2,2}=(G^{2,2}_{\iota j})_{6\times 6},~G^{3,1}=(G^{3,1}_{\iota j})_{6\times 6},~G^{3,2}=(G^{3,2}_{\iota j})_{6\times 6}\) are chosen as, respectively

\(\Vert e_{\iota }(t)\Vert ,~\iota = 1, 2,\ldots ,6\)
The parameters \(A=\mathrm {diag}(a_1,a_2,\ldots ,a_n)\), \(D=(d_{rj})_{n\times n}\) in the network (40) can be changed same as those in (39). Obviously, \(g_k(\cdot )~(k=1,2,3)\) satisfies Assumption 1 with \(\theta _k=0.25\). Take \(W=\mathrm {diag}(0.2I_3,0.1I_3,0.3I_3,0.6I_3,0.4I_3,0.5I_3)\). By employing MATLAB Toolbox, the following matrices \(P,~Q_1,~Q_2\) and \(Q_3\) satisfying (37) can be obtained:
According to Theorem 8, the network (40) with the parameter ranges defined by (39) achieves robust finite-time anti-synchronization under the controller (24) and the time estimation of achieving anti-synchronization is \(T_2=4.46\). The simulation result is displayed in Fig. 2.
6 Conclusion
In this paper, the finite-time anti-synchronization and robust finite-time anti-synchronization for MWCNNs with and without coupling delays have been respectively studied. By making use of Lyapunov functional method as well as inequality techniques, some finite-time anti-synchronization and robust finite-time anti-synchronization conditions have been derived for those network models. Furthermore, we have also considered the finite-time anti-synchronization and robust finite-time anti-synchronization of MWCNNs with switching topology. Finally, several simulation examples have been provided to verified the correctness of our results.
References
Lin SH, Kung SY, Lin LJ (1997) Face recognition/detection by probabilistic decision-based neural network. IEEE Trans Neural Netw 8(1):114–132
Asadia E, Silva MG, Antunes CH, Diasc L, Glicksman L (2014) Multi-objective optimization for building retrofit: a model using genetic algorithm and artificial neural network and an application. Energy Build 81:444–456
Sakthivel R, Vadivel P, Mathiyalaganc K, Arunkumar A, Sivachitra M (2015) Design of state estimator for bidirectional associative memory neural networks with leakage delays. Inf Sci 296:263–274
Zheng ZW, Huang YT, Xie LH, Zhu B (2018) Adaptive trajectory tracking control of a fully actuated surface vessel with asymmetrically constrained input and output. IEEE Trans Control Syst Technol 26(5):1851–1859
Zheng ZW, Sun L, Xie LH (2018) Error constrained LOS path following of a surface vessel with actuator saturation and faults. IEEE Trans Syst Man Cybern Syst 48(10):2168–2216
Gao F, Huang T, Sun JP, Wang J, Hussain A, Yang E (2018) A new algorithm of SAR image target recognition based on improved deep convolutional neural network. Cognit Comput. https://doi.org/10.1007/s12559-018-9563-z
Yue ZY, Gao F, Xiong QX, Wang J, Huang T, Yang E, Zhou HY (2019) A novel semi-supervised convolutional neural network method for synthetic aperture radar image recognition. Cognit Comput. https://doi.org/10.1007/s12559-019-09639-x
Zhang CK, He Y, Jiang L, Wang QG, Wu M (2017) Stability analysis of discrete-time neural networks with time-varying delay via an extended reciprocally convex matrix inequality. IEEE Trans Cybern 47(10):3040–3049
Wang H, Duan S, Huang T, Wang L, Li C (2017) Exponential stability of complex-valued memristive recurrent neural networks. IEEE Trans Neural Netw Learn Syst 28(3):766–771
Wang JL, Wu HN, Guo L (2011) Passivity and stability analysis of reaction-diffusion neural networks with dirichlet boundary conditions. IEEE Trans Neural Netw 22(12):2105–2116
Yang CB, Huang TZ (2014) Improved stability criteria for a class of neural networks with variable delays and impulsive perturbations. Appl Math Comput 243:923–935
Ahn CK (2013) Passive and exponential filter design for fuzzy neural networks. Inf Sci 238:126–137
Wang LM, Zeng ZG, Ge MF, Hu JH (2018) Global stabilization analysis of inertial memristive recurrent neural networks with discrete and distributed delays. Neural Netw 105:65–74
Prakash M, Balasubramaniam P, Lakshmanan S (2016) Synchronization of Markovian jumping inertial neural networks and its applications in image encryption. Neural Netw 83:86–93
Xie QX, Chen GR, Bollt EM (2002) Hybrid chaos synchronization and its application in information processing. Math Comput Model 35:145–163
Zhang J, Gao YB (2017) Synchronization of coupled neural networks with time-varying delay. Neurocomputing 219:154–162
Zhang H, Sheng Y, Zeng ZG (2018) Synchronization of coupled reaction-diffusion neural networks with directed topology via an adaptive approach. IEEE Trans Neural Netw Learn Syst 29(5):1550–1561
Wang JY, Zhang HG, Wang ZS, Shan QH (2016) Local synchronization criteria of markovian nonlinearly coupled neural networks with uncertain and partially unknown transition rates. IEEE Trans Syst Man Cybern 47(8):1953–1964
Bao HB, Park JH, Cao JD (2016) Exponential synchronization of coupled stochastic memristor-based neural networks with time-varying probabilistic delay coupling and impulsive delay. IEEE Trans Neural Netw Learn Syst 27(1):190–201
Chen HB, Shi P, Lim CC (2017) Exponential synchronization for markovian stochastic coupled neural networks of neutral-type via adaptive feedback control. IEEE Trans Neural Netw Learn Syst 28(7):1618–1632
Huang YL, Xu BB, Ren SY (2018) Analysis and pinning control for passivity of coupled reaction–diffusion neural networks with nonlinear coupling. Neurocomputing 272(10):334–342
Huang YL, Wang SX, Ren SY (2019) Pinning exponential synchronization and passivity of coupled delayed reaction–diffusion neural networks with and without parametric uncertainties. Int J Control 92(5):1167–1182
Altafini C (2013) Consensus problems on networks with antagonistic interactions. IEEE Trans Autom Control 58(4):935–946
Kim CM, Rim S, Kye WH, Ryu JW, Park YJ (2003) Anti-synchronization of chaotic oscillators. Phys Lett A 320(1):39–46
Wang WP, Li LX, Peng HP, Wang WN, Kurths J, Xiao JH, Yang YX (2016) Anti-synchronization of coupled memristive neutral-type neural networks with mixed time-varying delays via randomly occurring control. Nonlinear Dyn 83(4):2143–2155
Liu D, Zhu S, Sun K (2018) Global anti-synchronization of complex-valued memristive neural networks with time delays. IEEE Trans Cybern. https://doi.org/10.1109/TCYB.2018.2812708
Zhao HY, Zhang Q (2011) Global impulsive exponential anti-synchronization of delayed chaotic neural networks. Neurocomputing 74:563–567
Sakthivel R, Anbuvithya R, Mathiyalagan K, Ma YK, Prakash P (2016) Reliable anti-synchronization conditions for BAM memristive neural networks with different memductance functions. Appl Math Comput 275:213–228
Wang JY, Zhang HG, Wang ZS, Gao WZ (2017) Finite-time synchronization of coupled hierarchical hybrid neural networks with time-varying delays. IEEE Trans Cybern 47(10):2995–3004
Liu XY, Cao JD, Yu WW, Song Q (2016) Nonsmooth finite-time synchronization of switched coupled neural networks. IEEE Trans Cybern 46(10):2360–2371
Liu XW, Chen TP (2018) Finite-time and fixed-time cluster synchronization with or without pinning control. IEEE Trans Cybern 48(1):240–252
Sun JW, Wang Y, Wang YF, Shen Y (2016) Finite-time synchronization between two complex-variable chaotic systems with unknown parameters via nonsingular terminal sliding mode control. Nonlinear Dyn 85(2):1105–1117
Sun JW, Wu YY, Cui GZ, Wang YF (2017) Finite-time real combination synchronization of three complex-variable chaotic systems with unknown parameters via sliding mode control. Nonlinear Dyn 88(3):1677–1690
Sun JW, Zhao XT, Fang J, Wang YF (2018) Autonomous memristor chaotic systems of infinite chaotic attractors and circuitry realization. Nonlinear Dyn 94(4):2879–2887
Zhang DY, Shen YJ, Mei J (2017) Finite-time synchronization of multi-layer nonlinear coupled complex networks via intermittent feedback control. Neurocomputing 225:129–138
Mei J, Jiang MH, Xu WM, Wang B (2013) Finite-time synchronization control of complex dynamical networks with time delay. Commun Nonlinear Sci Numer Simul 18(9):2462–2478
Wang LM, Shen Y, Zhang GD (2017) Finite-time stabilization and adaptive control of memristor-based delayed neural networks. IEEE Trans Neural Netw Learn Syst 28(11):2648–2659
Wang LM, Zeng ZG, Hu JH, Wang XP (2017) Controller design for global fixed-time synchronization of delayed neural networks with discontinuous activations. Neural Netw 87:122–131
Huang YL, Qiu SH, Ren SY (2019) Finite-time synchronization and passivity of coupled memristive neural networks. Int J Control. https://doi.org/10.1080/00207179.2019.1566640
Zheng ZW, Xie LH (2017) Finite-time path following control for a stratospheric airship with input saturation and error constraint. Int J Control. https://doi.org/10.1080/00207179.2017.1357839
Sui X, Yang YQ, Wang F, Zhang LZ (2017) Finite-time anti-synchronization of time-varying delayed neural networks via feedback control with intermittent adjustment. Adv Differ Equ NY. https://doi.org/10.1186/s13662-017-1264-5
Wang WP, Li LX, Peng HP, Kurths J, Xiao JH, Yang YX (2016) Finite-time anti-synchronization control of memristive neural networks with stochastic perturbations. Neural Process Lett 43(1):49–63
Qiu SH, Huang YL, Ren SY (2018) Finite-time synchronization of multi-weighted complex dynamical networks with and without coupling delay. Neurocomputing 275:1250–1260
Wang JL, Xu M, Wu HN, Huang TW (2018) Finite-time passivity of coupled neural networks with multiple weights. IEEE Trans Netw Sci Eng 5(3):184–197
Huang YL, Ren SY (2018) Passivity and passivity-based synchronization of switched coupled reaction–diffusion neural networks with state and spatial diffusion couplings. Neural Process Lett 47(2):347–363
Wu YY, Cao JD, Li QB, Alsaedi A, Alsaadi FE (2017) Finite-time synchronization of uncertain coupled switched neural networks under asynchronous switching. Neural Netw 85:128–139
Wen GH, Yu WW, Hu GQ, Cao JD, Yu XH (2015) Pinning synchronization of directed networks with switching topologies: a multiple lyapunov functions approach. IEEE Trans Neural Netw Learn Syst 26(12):3239–3250
Zhen Q, Wang JL, Huang YL, Ren SY (2017) Synchronization and \(\cal{H}_\infty \) synchronization of multi-weighted complex delayed dynamical networks with fixed and switching topologies. J Frankl Inst 354:7119–7138
Wang SX, Huang YL, Ren SY (2017) Synchronization and robust synchronization for fractional-order coupled neural networks. IEEE Access 5:12439–12448
Zheng C, Cao JD (2014) Robust synchronization of coupled neural networks with mixed delays and uncertain parameters by intermittent pinning control. Neurocomputing 141:153–159
Qin Z, Wang JL, Huang YL, Ren SY (2018) Analysis and adaptive control for robust synchronization and \(\cal{H}_\infty \) synchronization of complex dynamical networks with multiple time-delays. Neurocomputing 289:241–251
Liang JL, Wang ZD, Liu YR, Liu XH (2008) Robust synchronization of an array of coupled stochastic discrete-time delayed neural networks. IEEE Trans Neural Netw 19(11):1910–1921
Tang Y (1998) Terminal sliding mode control for rigid robots. Automatica 34(1d):51–56
Huang XQ, Lin W, Yang B (2005) Global finite-time stabilization of a class of uncertain nonlinear systems. Automatica 41:881–888
Shen H, Huo SC, Cao JD, Huang TW (2019) Generalized state estimation for Markovian coupled networks under round-robin protocol and redundant channels. IEEE Trans Cybern 49(4):1292–1301
Shen H, Li F, Yan HC, Karimi HR, Lam HK (2019) Finite-time event-triggered \(\cal{H}_\infty \) control for T–S fuzzy Markov jump systems. IEEE Trans Fuzzy Syst 26(5):3122–3135
Shen H, Li F, Xu SY, Sreeram V (2018) Slow state variables feedback stabilization for semi-Markov jump systems with singular perturbations. IEEE Trans Autom Control 63(8):2709–2714
Shen H, Wang T, Cao JD, Lu GP, Song YD, Huang TW (2018) Nonfragile dissipative synchronization for Markovian Memristive neural networks: a gain-scheduled control scheme. IEEE Trans Neural Netw Learn Syst. https://doi.org/10.1109/TNNLS.2018.2874035
Shen H, Men YZ, Wu ZG, Cao JD, Lu GP (2019) Network-based quantized control for fuzzy singularly perturbed semi-Markov jump systems and its application. IEEE Trans Circuits Syst I Regul Pap 66(3):1130–1140
Shen H, Li F, Wu ZG, Park JH, Sreeram V (2018) Fuzzy-model-based non-fragile control for nonlinear singularly perturbed systems with semi-Markov jump parameters. IEEE Trans Fuzzy Syst 26(6):3428–3439
Shen H, Men YZ, Wu ZG, Park JH (2018) Nonfragile \(\cal{H}_\infty \) control for fuzzy Markovian jump systems under fast sampling singular perturbation. IEEE Trans Syst Man Cyber Syst 48(12):2058–2069
Acknowledgements
The authors would like to thank the Associate Editor and anonymous reviewers for their valuable comments and suggestions. They also wish to express their sincere appreciation to Prof. Jinliang Wang for the fruitful discussions and valuable suggestions which helped to improve this paper. This work was supported in part by the Natural Science Foundation of Tianjin city under Grant 18JCQNJC74300, in part by China Scholarship Council (No. 201808120044), and in part by the National Natural Science Foundation of China under Grant 61773285. Dr E. Yang is supported in part under the RSE-NNSFC Joint Project (2017–2019) (6161101383) with China University of Petroleum (East China).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Hou, J., Huang, Y. & Yang, E. Finite-Time Anti-synchronization of Multi-weighted Coupled Neural Networks With and Without Coupling Delays. Neural Process Lett 50, 2871–2898 (2019). https://doi.org/10.1007/s11063-019-10069-x
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-019-10069-x