
Abstract
In this paper, a unified control strategy is proposed to explore the issues of finite-time (FTT) synchronization and fixed-time (FXT) one for multi-weighted dynamical networks (MWDNs) simultaneously. A new unified finite-/fixed-time (FTT/FXT) stability result is firstly derived for nonlinear dynamical systems, wherein the settling time is more precisely estimated. Then, by designing a novel feedback controller, unified sufficient conditions are established for FTT/FXT synchronization of the MWDNs under study. It is indicated that the conversion between FTT synchronization and FXT one can be realized through simply adjusting one control parameter, exhibiting the flexibility of the control scheme in real-world applications. Moreover, the designed unified control protocol does not contain signum function, which can avoid the occurrence of chattering phenomena during the synchronization process. In particular, a detailed analysis about the relationships between the settling time and the main control parameters is given, which facilitates the selection of control parameters in practice. Lastly, numerical simulations are presented to validate the correctness of the theoretical results.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
During the past two decades, extensive research has been carried out on the dynamic behaviors of complex dynamical networks, because numerous complex systems in nature and human society can be effectively modeled through complex dynamical networks, such as power grids, biological networks, communication networks, and multi-agent networks [1, 2]. As an important collective behavior, synchronization in complex dynamical networks has sparked a surge of interest in network science owing to its practical applications in combinatorial optimization, image processing, and the self-assembly formation of robotic systems [3,4,5,6,7,8]. In view of the difficulty of realizing self-synchronization for most realistic dynamical networks [9,10,11], many effective controllers have been designed to prompt dynamical networks to reach synchronization, such as pinning control, adaptive control, intermittent control, impulsive control, and event-triggered control [7,8,9,10,11,12,13,14,15,16].
In the investigation of synchronous control, how to cut down the time required for achieving synchronization, regarded as the settling time, is an important topic. By utilizing asymptotic or exponential synchronization techniques, dynamical networks will reach synchronization in infinite settling time [11, 16], which means that it requires an infinite-time control input to make dynamical networks synchronize. When high control accuracy and fast convergence speed are required, high-gain control is often indispensable. In practical applications, however, infinite-time control is not realistic, and moreover from the perspective of cost, infinite-time control and high-gain control are not economical due to the high cost. In reality, it is highly expected that dynamical networks can reach synchronization within a finite-time interval at the lowest possible cost, owing to energy constraints and task requirements [17,18,19,20]. To this end, two categories of efficient control methods have been developed: one is finite-time (FTT) control [19] and the other is fixed-time (FXT) one [20]. These two control techniques both can make dynamical networks achieve synchronization within a finite-time interval, i.e., the settling time is finite. The main difference between them is that the former’s settling time heavily depends on the initial states of dynamical networks, while the latter’s settling time has a uniform upper-bound for all initial states, i.e., its settling time is irrelevant to the initial states [21,22,23,24,25,26]. Evidently, the FXT control is superior to the FTT control since it requires the controlled dynamical networks realize synchronization within a fixed time unrelated to the initial states. Actually, FXT control is proposed on the basis of the finite-time stability by requiring the boundedness of the settling time, which can be viewed as a special case of FTT control [25,26,27]. Therefore, a natural idea is to design a common control technology that unifies FTT control and FXT one. Along this line of thinking, Li et al. first designed two types of novel control protocols, including discontinuous feedback control and adaptive feedback control, and showed that, under the control protocols, a class of delayed Cohen–Grossberg neural networks with discontinuous activations can, respectively, achieve exponential synchronization, FTT synchronization and FXT synchronization, when a control parameter takes different values [25]. Since then, how to design a unified control scheme such that the FTT synchronization and the FXT one of dynamical networks can be investigated simultaneously, has become a hot research issue due to its generality and convenience in applications. Currently, some interesting results on this issue have been reported [26,27,28,29,30]. In [26], the problems of FTT/FXT synchronization for dynamical networks with discontinuous nodes dynamics were studied by using a unified control strategy. In [27], a unified theoretical framework was proposed to analyze the FTT/FXT pinning synchronization of dynamical networks in the presence of stochastic disturbances. In [28], a unified control scheme was developed to explore the issues of FTT/FXT synchronization for multilayer dynamical networks. Duan et al. discussed the FTT/FXT synchronization problems for delayed complex-valued neural networks under the effects of discontinuity and diffusion by designing a unified negative exponent controller [29]. Xiao et al. established unified sliding-mode control schemes to study the FTT/FXT synchronization of discontinuous neural networks with matched disturbance [30].
It should be noted that most previous studies on network synchronous mainly focus on unweighted or single-weighted dynamical networks [7,8,9,10,11,12,13,14,15,16, 22,23,24,25,26,27,28,29,30], while few studies are concerned with the issue of multi-weighted dynamical networks (MWDNs). In practice, multi-weights (i.e., network nodes are connected by multiple edges with different weights) are ubiquitous in real-world dynamical networks, such as social networks, biological neural networks, traffic networks, communication networks [31,32,33]. For example, in social networks, due to the existing of multiple contact forms between two individuals, social networks should be modeled by MWDNs as a result of different weight of each contact information. In traffic networks, there usually exist multiple transportation modes between two locations. Since every traffic mode possesses different weight, using MWDNs to describe traffic networks is more suitable. Moreover, MWDNs have been indicated to be highly effective in some real-world applications [34,35,36]. In [34], based on double-weight neural networks, a new data-fitting algorithm was proposed for the system’s power management, and it was illustrated that this algorithm has a better performance in improving the correct rate of shutting down and reducing the power consumption during idle periods. In [35], a learning algorithm based on two-weight neural networks was introduced, and its successful application in segmenting the vehicle license plate was indicated. In [36], the authors utilized multi-weights neural networks to identify the falling body posture, and found that it is more excellent than the support vector machine in recognizing the falling of aged people. Therefore, the investigation of the synchronization dynamics in MWDNs is necessary and meaningful. In [32], an analysis of synchronization in MWDNs was performed and its application in urban public traffic network was also discussed. In [33] and [37], the problem of FTT synchronization and that of FXT one for MWDNs were addressed, respectively. In [38], the FTT synchronization of fractional-order complex-variable dynamical networks with multi-weights was analyzed. Wang et al. explored the problems of FTT synchronization and \(\mathcal {H}_\infty\) synchronization for adaptive state coupled MWDNs without or with coupling delays, respectively [39]. Xu et al. investigated the issues of FTT intra-layer and inter-layer quasi-synchronization in two-layer MWDNs [40].
On the other hand, in order to make sure dynamical networks can be finite-timely or fixed-timely synchronized, signum function is essential to the designed controllers in most of the aforementioned researches [22,23,24,25,26,27,28,29,30, 33, 37,38,39,40]. Regretfully, signum function is a discontinuous function, which would switch discontinuously, resulting in high-frequency chattering. Therefore, it will damage apparatus and give rise to undesirable results [41,42,43,44,45,46]. Recently, much effort has been devoted to eliminating this unexpected phenomenon. In [41], a novel discontinuous controller excluding signum function was proposed to explore the problem of FTT synchronization for impulsively coupled networks with Markovian topology. In [42], an innovative chatter-free continuous controller was first designed for the FXT synchronization of dynamical networks with impulsive effects. Later, the control technique proposed in [42] was adopted to study the FXT synchronization of dynamical networks in the present of stochastic disturbances [43]. In [44] and [45], on the basis of the design concept in [42], a more simpler non-chattering control approach discarding the linear feedback term was proposed to prompt dynamical networks to achieve FXT synchronization and FXT cluster one, respectively. More recently, by replacing the signum function with some saturation functions, a novel continuous controller was put forward in [46] to stabilize chaotic systems in fixed time or preassigned time. To the best of the authors’ knowledge, however, utilizing a common control approach without signum function to finite-timely and fixed-timely synchronize MWDNs simultaneously, has not been taken into account in the literature.
Clearly, one of the main tasks in the research of FTT or FXT synchronization is to determine the exact value of settling time. Generally, deriving an analytical formula for settling time is difficult or impossible. This is because of the lack of theoretical tools for evaluating a proper integral or an improper one, wherein the integrand function is a complicated rational fraction [26, 46,47,48,49]. Hence, various attempts have been conducted to estimate its value [20,21,22, 26, 46,47,48,49,50]. In [20] and [21], some inequality methods and an implicit Lyapunov function technique were employed, respectively, to roughly calculate the settling time. In [22], the settling time was estimated by regrading it as an inverse function of the chosen Lyapunov function. In [26] and [47], a more precise approximation of settling time was obtained based on the theory of optimal values. In [48] and [49], using the method of variable transformation and the inequalities theory, some less conservative estimates of settling time were given. Lately, Hu et al. worked out a highly precise estimation value of settling time by utilizing some special functions [46, 50]. Unfortunately, there still exists a considerable gap between the estimated value and the real synchronous time, indicated by the experimental examples in [22, 46,47,48,49,50]. Evidently, it hinders their practical applications. Therefore, developing some new methods to reduce the gap and improve the accuracy of estimation of the settling time is necessary and important.
Enlightened by the foregoing discussion, the main aim of this paper is to explore the problems of FTT/FXT synchronization for MWDNs. In our scenario, a new unified FTT/FXT stability result is first established for nonlinear dynamical systems, and then based on which, the issues of synchronization in finite time and fixed time are discussed for MWDNs simultaneously by designing a unified control scheme. The main contribution is listed as follows.
-
1)
A new unified result about FTT/FXT stability is established for nonlinear dynamical systems and some less conservative estimates for the settling time are acquired by disposing of the corresponding proper integral or improper one skillfully. It is proved strictly that these estimates are more accurate than those given in the existing researches [26, 28].
-
2)
By designing a novel feedback controller, some unified sufficient conditions are obtained for FTT/FXT synchronization of MWDNs. It is shown that the conversion between FTT synchronization and FXT one can be realized through simply adjusting one control parameter, exhibiting the flexibility of the control scheme in practical applications. In addition, the designed unified control protocol does not contain signum function, which is much easier to implement compared to the counterparts in [22,23,24,25,26,27,28,29,30, 33, 37,38,39,40] due to the prevention of the occurrence of chattering phenomena.
Notations. \(\mathbb {R}\), \(\mathbb {R}^n\), and \(\mathbb {R}^{n\times n}\) denote, respectively, the set of real numbers, the Euclidean space, and the set of \(n\times n\) real matrices. \(||\cdot ||\) stands for the Euclidean norm. The superscript “\(\top\)” represents transposition. \(I_{n}\) is the \(n\times n\) identity matrix. \(\varGamma =\mathrm{diag}(\gamma _1,\gamma _2,\ldots ,\gamma _n)\) means \(\varGamma\) is a diagonal matrix. The maximum eigenvalue of a square matrix P is denoted as \(\lambda _{\max }(P)\). For a real symmetric matrix Q, \(Q <0\) \((Q > 0)\) implies that Q is negative (positive) definite.
The rest of the work is organized as follows. Section 2 presents the model of MWDNs and introduces some necessary preliminaries. Section 3 is the main results, a unified control scheme is designed and some sufficient criteria are obtained to ensure the FTT/FXT synchronization of the MWDNs. Section 4 gives numerical simulations to verify the derived theoretical results. Finally, Sect. 5 draws a conclusion of the work.
2 Model and preliminaries
Consider a MWDN composed of N nodes and m weights. Herein the m weights assigned to the edge between the ith and jth nodes are denoted, respectively, by \(a_{ij}^{(1)},a_{ij}^{(2)}, \ldots ,a_{ij}^{(m)}\), where \(a_{ij}^{(k)}\) \((k=1,2,...,m)\) stands for the weight under the kth coupling way. Generally, different weights represent different properties, and therefore the weights with the same property, together with N nodes, constitute a sub-network. Accordingly, a dynamical network with m weights can be split into m single-weighted sub-networks. We take a network consisting of 4 nodes and 3 weights as an example and the architecture of such network as well as its split is shown in Fig. 1. Based on the idea, the model of the MWDN can be written as follows [32, 33, 37]:
where \(x_{i}(t)=\big (x_{i1}(t),x_{i2}(t),...,x_{in}(t)\big )^{\top } \in \mathbb {R}^{n}\) denotes the state of the ith node, \(g(x_{i}(t))\in \mathbb {R}^{n}\) is a continuous function, reflecting the inherent dynamics of an isolated node, \(\varXi _{k}\) \(=\) \(\mathrm{diag}\big (\xi _1^{(k)},\xi _2^{(k)},\ldots ,\xi _n^{(k)})>0\) \((k=1,2,...,m)\) represents the inner-connection matrix of the kth coupling form, and \(A^{(k)}=\big (a_{ij}^{(k)}\big )_{N\times N}\) \(\in\) \({ \mathbb {R}^{N\times N}}\) \((k=1,2,...,m)\) is the coupling weight matrix, describing the topological structure of the network under the kth coupling way, in which \(a_{ij}^{(k)}>0\) if the jth node possesses a directed edge to the ith node (\(i\ne j\)); otherwise, \(a_{ij}^{(k)}=0\). Additionally, for the matrix \(A^{(k)}\), its the diagonal entries are set as \(\sum _{j=1, j\ne i}^{N}a_{ij}^{(k)}=-a_{ii}^{(k)},\) \(i=1,2,...,N\). The initial value of system (1) is \(x_i(0)=\varphi _i\in \mathbb {R}^{n}\), \(i=1,2,\ldots ,N\).
Remark 1
In practice, there often exist multiple coupling ways between nodes in many real-world dynamical networks, such as social networks, biological neural networks, traffic networks, communication networks [31,32,33]. Since each coupling form may have different weight, MWDNs are more suitable to describe these dynamical networks in comparison with unweighted or single-weighted dynamical networks. Therefore, this work is concerned with MWDNs. Obviously, if \(m=1\), system (1) is simplified as a single-weighted dynamical network, considered in most previous studies [7,8,9,10,11,12,13,14,15,16, 22,23,24,25,26,27].
Remark 2
In realistic networks, there usually exist multiple types of links between each pair of network nodes, and each type of link possess its own special property. Such networks are known as multi-links dynamical networks (MLDNs) [14, 52,53,54]. Virtually, if different types of links are assigned with different weights based on their properties, then MLDNs are regarded as MWDNs. Therefore, the mathematical model describing MWDNs [32, 33, 37] is the same as that depicting MLDNs [14, 52,53,54]. The main difference between MWDNs and MLDNs lies in the meaning of the coupling matrix \(A^{(k)}\). In MWDNs, \(A^{(k)}\) characterizes the topological structure of the networks under the kth coupling way, while it represents the topological structure of the kth layer (or sub-network) in MLDNs, wherein each layer (or sub-network) is composed of network nodes with the the same type of link [14, 52,53,54].

The sketch map of a network consisting of 4 nodes and 3 weights and its split, where edges with different colours represent different coupling ways and the symbol beside each edge denotes the connection weight
Here, system (1) is perceived as the drive network, and consequently the response network follows
where \(y_{i}(t)=\big (y_{i1}(t),y_{i2}(t),...,y_{in}(t)\big )^{\top } \in \mathbb {R}^{n}\), and \(u_i(t)\in \mathbb {R}^{n}\) stands for the controller to be designed, which satisfies \(u_i(t)=0\) when \(y_{i}(t)=x_{i}(t)\) (i.e., when the synchronization between the drive network (1) and the response network (2) is achieved, the control inputs are no longer needed). The initial value of system (2) is \(y_i(0)=\psi _i\in \mathbb {R}^{n}\), \(i=1,2,\ldots ,N\).
By defining the synchronous error of the ith node as \(e_{i}(t)=y_{i}(t)-x_{i}(t)\), we hereby obtain the following the error system
where \({\tilde{g}}(e_i(t))=g\big (x_{i}(t)+e_i(t)\big )-g(x_{i}(t)).\)
Definition 1
The drive-response network (1) and (2) is said to reach FTT synchronization if the null solution of system (3) is FTT stable, that is to say, for any initial value \(e(0)=\big (e_1^{\top }(0),e_2^{\top }(0),\ldots ,e_N^{\top }(0)\big )^{\top }\in \mathbb {R}^{nN}\), there exists a constant \(T(e(0))\in [0,+\infty )\) such that
where \(i=1,2,...,N\), \(e_i(0)=\psi _i-\varphi _i\), and T(e(0)) is known as the settling time, which is relevant with the initial value e(0).
Definition 2
The drive-response network (1) and (2) is said to reach FXT synchronization if the null solution of system (3) is FXT stable, that is to say, the null solution of system (3) is FTT stable and the setting time T(e(0)) is bounded by a fixed constant \(T_\mathrm{max}\), namely, \(T(e(0))\le T_{\mathrm{max}}\) for any initial value e(0).
For facilitating the later discussion, the following assumption and lemmas are introduced.
Assumption 1
([16]) There exists a nonnegative constant \(\eta \ge 0\) such that
holds for any \(z_1\),\(z_2\in \mathbb {R}^{n}\).
Remark 3
Assumption 1 provides a basic requirement on the dynamics of each uncoupled node in the network (1). In fact, by selecting an appropriate constant \(\eta \ge 0\), a large number of nonlinear systems, including Chua’s circuit, neural networks and genetic oscillators (see [11, 14, 24], and references therein), satisfy Eq. (4).
Lemma 1
([23]) Set \(\nu _{i}\ge 0,\ i=1,2,...,n,\ 0<r\le 1,\ s\ge 1\), then
Lemma 2
([26]) Suppose that \(V(e(t)):\mathbb {R}^{nN}\rightarrow \mathbb {R}\) is a continuous, radially unbounded, positive-definite function, where e(t) \(=\) \(\big (e_1^{\top }(t),e_2^{\top }(t),\ldots ,e_N^{\top }(t)\big )^{\top }\). For system (3), if the following inequality holds
where \(\kappa _{1},\ \kappa _{3}>0\), and \(q\ge 0\). Then the conclusions below are true.
- 1):
-
When \(0\le q \le 1\), the null solution of system (3) is FTT stable and the estimate of T(e(0)) is
$$\begin{aligned} T(e(0))\le \left\{ \begin{aligned}&\tilde{T}_{1}\triangleq \frac{1}{\kappa _{1}+\kappa _{3}}V(e(0)),&q=0,\\&\tilde{T}_{2}\triangleq \frac{1}{1-q}\bigg (\frac{\kappa _1^{1-q}}{\kappa _3}\bigg )^{\frac{1}{q}}\Bigg (\bigg (1+\Big (\frac{\kappa _3}{\kappa _1}\Big )^{\frac{1}{q}}V(e(0)) \bigg )^{1-q}-1\Bigg ),\quad \quad&0<q<1,\\&\tilde{T}_{3}\triangleq \frac{1}{\kappa _{3}}\ln \frac{\kappa _{1}+\kappa _{3}V(e(0)}{\kappa _{1}},&q=1. \end{aligned} \right. \end{aligned}$$ - 2):
-
When \(q>1\), the null solution of system (3) is FXT stable and the estimate of T(e(0)) is
$$\begin{aligned} T(e(0))\le \tilde{T}_{4}\triangleq \frac{1}{\kappa _{1}}\Big (\frac{\kappa _1}{\kappa _3}\Big )^{\frac{1}{q}} \big (1+\frac{1}{q-1} \big ). \end{aligned}$$
Lemma 3
([28]) For system (3), if \(V(e(t)):\mathbb {R}^{nN}\rightarrow \mathbb {R}\) is continuous, radially unbounded, positive-definite function and satisfies
where e(t) \(=\) \(\big (e_1^{\top }(t),e_2^{\top }(t),\ldots ,e_N^{\top }(t)\big )^{\top }\), \(\kappa _{1},\ \kappa _{2},\ \kappa _{3}>0\), and \(q\ge 0\). Then the following statements are true.
- 1):
-
When \(0\le q \le 1\), the null solution of system (3) is FTT stable and the estimate of T(e(0)) is
$$\begin{aligned} T(e(0))\le \left\{ \begin{aligned}&\hat{T}_{1}\triangleq \frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _{3}+\kappa _{2}V(e(0))}{\kappa _{1}+\kappa _{3}},&q=0,\\&\hat{T}_{2}\triangleq \frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _{2}V(e(0))}{\kappa _{1}},\quad \quad&0<q<1,\\&\hat{T}_{3}\triangleq \frac{1}{\kappa _{2}+\kappa _{3}}\ln \frac{k_{1}+(\kappa _{2}+\kappa _{3})V(e(0))}{\kappa _{1}},&q=1. \end{aligned} \right. \end{aligned}$$ - 2):
-
When \(q>1\), the null solution of system (3) is FXT stable and the estimate of T(e(0)) is
$$\begin{aligned} T(e(0))\le \hat{T}_{4}\triangleq \frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _{2}}{\kappa _{1}}+\frac{1}{\kappa _{3}(q-1)}. \end{aligned}$$
For deriving the main results of this work, a new unified FTT/FXT stability result for system (3) is established as follows:
Lemma 4
For system (3), if there exists a continuous, radially unbounded, positive-definite function \(V(e(t)):\mathbb {R}^{nN}\rightarrow \mathbb {R}\) satisfying the inequality below
where \(e(t)= \big (e_1^{\top }(t),e_2^{\top }(t),\ldots ,e_N^{\top }(t)\big )^{\top }\), \(\kappa _{1},\, \kappa _{2},\, \kappa _{3}>0\), and \(q\ge 0\). Then the following results hold.
- 1):
-
When \(q=0\), the null solution of system (3) is FTT stable and the estimate of T(e(0)) is
$$\begin{aligned} T(e(0))\le {T}_{1}^*\triangleq \frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _{3}+\kappa _{2}V(e(0))}{\kappa _{1}+\kappa _{3}}. \end{aligned}$$ - 2):
-
When \(0<q<1\), the null solution of system (3) is FTT stable and the estimate of T(e(0)) is ① If \(\kappa _{1}< q^{\frac{q}{1-q}}\kappa _{2}^{\frac{q}{q-1}}\kappa _{3}^{\frac{1}{1-q}}\), then
$$\begin{aligned} T(e(0))\le {T}_{2}^*\triangleq \left\{ \begin{aligned}&\frac{1}{1-q}\bigg (\frac{\kappa _1^{1-q}}{\kappa _3}\bigg )^{\frac{1}{q}}\Bigg (\bigg (1+\Big (\frac{\kappa _3}{\kappa _1}\Big )^{\frac{1}{q}}V(e(0)) \bigg )^{1-q}-1\Bigg ),&V(e(0))\le \zeta ^*,\\&\frac{1}{1-q}\bigg (\frac{\kappa _1^{1-q}}{\kappa _3}\bigg )^{\frac{1}{q}}\Bigg (\bigg (1+\Big (\frac{\kappa _3}{\kappa _1}\Big )^{\frac{1}{q}}\zeta ^* \bigg )^{1-q}-1\Bigg )\\&\quad \quad \quad \quad \quad \quad +\frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _3 {\big (\zeta ^*\big )}^{q}+\kappa _{2}V(e(0))}{\kappa _{1}+\kappa _3 {\big (\zeta ^*\big )}^{q}+\kappa _{2} \zeta ^*},&\quad V(e(0))> \zeta ^*. \end{aligned} \right. \end{aligned}$$where \(\zeta ^*>0\) is the unique positive solution of the equation \(\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q}-\kappa _1-\kappa _2 s=0\). ② If \(\kappa _{1}\ge q^{\frac{q}{1-q}}\kappa _{2}^{\frac{q}{q-1}}\kappa _{3}^{\frac{1}{1-q}}\), then
$$\begin{aligned} T(e(0))\le {T}_{2}^*\triangleq \frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _{2}V(e(0))}{\kappa _{1}}. \end{aligned}$$ - 3):
-
When \(q=1\), the null solution of system (3) is FTT stable and the estimate of T(e(0)) is
$$\begin{aligned} T(e(0))\le {T}_{3}^*\triangleq \frac{1}{\kappa _{2}+\kappa _{3}}\ln \frac{\kappa _{1}+(\kappa _{2}+\kappa _{3})V(e(0))}{\kappa _{1}}. \end{aligned}$$ - 4):
-
When \(q>1\), the null solution of system (3) is FXT stable and the estimate of T(e(0)) is
$$\begin{aligned} T(e(0))\le {T}_{4}^*\triangleq \frac{q}{\kappa _{2}(q-1)}\ln \Big (1+\frac{\kappa _{2}}{\kappa _{1}}\Big (\frac{\kappa _{1}}{\kappa _{3}}\Big )^{\frac{1}{q}}\Big ). \end{aligned}$$
Proof
When \(q=0\), it follows from (5) that
By using the comparison theorem on (6), one can easily obtain
According to the properties of exponential function, it is derived that
Therefore, the null solution of system (3) is FTT stable and the estimate of T(e(0)) is \(T(e(0))\le {T}_{1}^*\).
When \(q=1\), we have
Similarly, one can derive that
and hence T(e(0)) is estimated as \(T(e(0))\le \displaystyle \frac{1}{\kappa _{2}+\kappa _{3}}\ln \frac{\kappa _{1}+(\kappa _{2}+\kappa _{3})V(e(0))}{\kappa _{1}}={T}_{3}^*\).
When \(0<q<1\) or \(q> 1\), construct the following uncertain limit integral function:
Evidently, \(F(V)\ge 0\), and \(F(V)= 0\) if and only if \(V=0\). In this following, in light of the proof methods in [24, 47], we prove that the null solution of system (3) is FTT stable.
According to (5), the time derivative of F(V) satisfies
For \(e_{0}\in \mathbb {R}^{n}\backslash \{0\}\), denote \(F(e_{0})=F(V(e(0)))\). Firstly, we show that there exists a \(\tilde{t} \in (0,F(e_{0})]\) such that \(e({\tilde{t}}\,)=0\). If it is not true, i.e., \(e(t)\ne 0\) for all \(t\in (0, F(e_{0})]\), then it follows from (9) that
This implies that \(e(F(e_0))=0\) due to the positive definiteness of V, which leads to an inconsistency. Next, we claim that \(e(t)=0\) for all \(t\ge {\tilde{t}}\). Otherwise, there is a \(t^*>{\tilde{t}}\) such that \(e(t^*)\ne 0\). Define
Evidently, \({\tilde{t}}\le {\hat{t}}<t^*\), \(e(\,{\hat{t}}\,)=0\), and \(e(t)\ne 0\) for any \(t\in ({\hat{t}}, t^*]\). From (9), we get
This means that \(F\big (V(e(t^*))\big )<0\) owing to the fact that \(F\big (V(e(\,{\hat{t}}\,))\big )=0\), which contradicts the nonnegativity of F. Hence, one can conclude that \(e(t)\equiv 0\) for all \(t\ge {\tilde{t}}\), i.e., the null solution of system (3) is FTT stable.
When \(0<q<1\), in order to estimate T(e(0)) more precisely, let
then
Denote \(s^\star =\kappa _{3}^{-\frac{1}{q}}\bigg (\Big (\frac{\kappa _{2}\kappa _{3}^{-\frac{1}{q}}}{q}\Big )^{\frac{1}{q-1}}-\kappa _{1}^{\frac{1}{q}}\bigg )\). Since \(\frac{\mathrm{d}}{\mathrm{d} s}\varPhi (s)\big |_{s=s^\star }=0\), the following two situations need to be discussed separately.
① Situation 1: \(\kappa _{1}< \displaystyle q^{\frac{q}{1-q}}\Big (\frac{\kappa _{3}}{\kappa _{2}^{q}}\Big )^{\frac{1}{1-q}}\)
For this situation, one has \(s^\star > 0\). It follows from (10) that \(\frac{\mathrm{d}}{\mathrm{d} s} \varPhi (s)>0\) for all \(s\in [0, s^\star )\) and \(\frac{\mathrm{d}}{\mathrm{d} s} \varPhi (s)<0\) for all \(s\in (s^\star , +\infty )\). In other word, \(\varPhi (s)\) monotonically increases on \([0, s^\star )\) and monotonically decreases on \((s^\star , +\infty )\). Due to the fact that \(\varPhi \big (s^\star \big )>\varPhi (0)=0\) and
which immediately follows from Lemma 1, the equation \(\varPhi (s)=\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q}-(\kappa _1+\kappa _2s)=0\) has a unique positive solution \(\zeta ^*\in \Big (s^\star , 2 \Big (\frac{\kappa _{3}}{\kappa _{2}}\Big )^{\frac{1}{1-q}} \Big )\). Therefore, \(\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q}>(\kappa _1+\kappa _2 s)\) for all \(s\in (0, \zeta ^*)\) and \(\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q}<(\kappa _1+\kappa _2 s)\) for all \(s\in (\zeta ^*, +\infty )\). Accordingly, T(e(0)) can be estimated as follows:
If \(V(e(0))\le \zeta ^*\), according to Lemma 1, then one has
and if \(V(e(0))> \zeta ^*\), then one can similarly obtain
② Situation 2: \(\kappa _{1}\ge \displaystyle q^{\frac{q}{1-q}}\Big (\frac{\kappa _{3}}{\kappa _{2}^{q}}\Big )^{\frac{1}{1-q}}\)
In this situation, it is easy to see \(s^\star \le 0\). This together with (10) yields \(\frac{\mathrm{d}}{\mathrm{d} s} \varPhi (s)<0\) for all \(s>0\), which indicates that \(\varPhi (s)\) monotonically decreases on \([0, +\infty )\). Accordingly, \(\varPhi (s)<\varPhi (0)\) for all \(s>0\), i.e., \(\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q}<(\kappa _1+\kappa _2 s)\) for all \(s>0\). Consequently, one can estimate T(e(0)) as below:
When \(q>1\), one may estimate the settling time T(e(0)) as follows:
where \(\rho >0\) is an arbitrary constant. Define
then we have
This implies that the minimum value of H(z) is taken at \(z^*=\displaystyle \big (\frac{\kappa _1}{\kappa _3}\big )^{\frac{1}{q}}\), which is denoted by
Therefore, \(T(e(0))\le H(z^*)= T_{4}^{*}\). This completes the proof. \(\hfill\square\)
In the following, a detailed analysis will be given to show that \(T_2^*\) and \(T_4^*\) of Lemma 4 are smaller, respectively, than \({\tilde{T}}_2\) and \({\tilde{T}}_4\) of Lemma 2 as well as smaller, respectively, than \({\hat{T}}_2\) and \({\hat{T}}_4\) of Lemma 3. First, a comparison among \(T_2^*\) and \({\tilde{T}}_2\), \({\hat{T}}_2\) is made. The comparison is divided into two cases: \(\kappa _{1}\ge q^{\frac{q}{1-q}}\kappa _{2}^{\frac{q}{q-1}}\kappa _{3}^{\frac{1}{1-q}}\) and \(\kappa _{1}< q^{\frac{q}{1-q}}\kappa _{2}^{\frac{q}{q-1}}\kappa _{3}^{\frac{1}{1-q}}\).
When \(\kappa _{1}\ge q^{\frac{q}{1-q}}\kappa _{2}^{\frac{q}{q-1}}\kappa _{3}^{\frac{1}{1-q}}\), it is clear that \(T_{2}^{*}={\hat{T}}_2\) and
Denote \(\mathcal {Q}(z)=\displaystyle \frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _{2}z }{\kappa _{1}}-\frac{1}{1-q} \Big (\frac{\kappa _{1}}{\kappa _{3}}\Big )^{\frac{1}{q}}\frac{1}{\kappa _{1}}\bigg (\Big (1+\Big (\frac{\kappa _{3}}{\kappa _{1}}\Big )^{\frac{1}{q}}z\Big )^{1-q}-1\bigg ) z\ge 0,\)then
Recalling that when \(\kappa _{1}\ge q^{\frac{q}{1-q}}\kappa _{2}^{\frac{q}{q-1}}\kappa _{3}^{\frac{1}{1-q}}\), \(\Big (\kappa _{1}^{\frac{1}{q}}+{\kappa _{3}}^{\frac{1}{q}}z\Big )^{q}<\kappa _{1}+\kappa _{2}z\) for all \(z>0\), we have \(\frac{\mathrm{d}}{\mathrm{d} z}\mathcal {Q}(z)<0\) for all \(z>0\). Therefore, \(\mathcal {Q}(z)<\mathcal {Q}(0)=0\), which means that \(T_{2}^{*}<{\tilde{T}}_2\).
When \(\kappa _{1}< q^{\frac{q}{1-q}}\kappa _{2}^{\frac{q}{q-1}}\kappa _{3}^{\frac{1}{1-q}}\), recalling that \(\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q}>(\kappa _1+\kappa _2s)\) for all \(s\in (0, \zeta ^*)\) and \(\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q}<(\kappa _1+\kappa _2s)\) for all \(s\in (\zeta ^*, +\infty )\), one has \(\frac{\mathrm{d}}{\mathrm{d} z}\mathcal {Q}(z)>0\) for all \(z\in (0, \zeta ^*)\) and \(\frac{\mathrm{d}}{\mathrm{d} z}\mathcal {Q}(z)<0\) for all \(z>\zeta ^*\). It follows that \(\mathcal {Q}(z)>\mathcal {Q}(0)=0\) for all \(z\in (0, \zeta ^*)\) and \(\mathcal {Q}(z)<\mathcal {Q}(\zeta ^*)\) for all \(z>\zeta ^*\). Hence, if \(V(e(0))\le \zeta ^*\), then \(T_{2}^{*}={\tilde{T}}_2\) and \(T_{2}^{*}<{\hat{T}}_2\). On the other hand, if \(V(e(0))> \zeta ^*\), then
and
Denote \(\mathcal {P}_1(z)=\displaystyle \frac{1}{(1-q)\kappa _{3}^{\frac{1}{q}}}\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}} \zeta ^*\Big )^{1-q}+\frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _3 {(\zeta ^*)}^{q}+\kappa _{2}z}{\kappa _{1}+\kappa _3 {(\zeta ^*)}^{q}+\kappa _{2} \zeta ^*}-\frac{1}{(1-q)\kappa _{3}^{\frac{1}{q}}}\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}z\Big )^{1-q}\), \(z\ge \zeta ^*\), and \(\mathcal {P}_2(z)=\displaystyle \frac{1}{1-q}\bigg (\frac{\kappa _1^{1-q}}{\kappa _3}\bigg )^{\frac{1}{q}}\Bigg (\bigg (1+\Big (\frac{\kappa _3}{k_1}\Big )^{\frac{1}{q}}\zeta ^* \bigg )^{1-q}-1\Bigg )+\frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _3 {(\zeta ^*)}^{q}+\kappa _{2}z}{\kappa _{1}+\kappa _3 {(\zeta ^*)}^{q}+\kappa _{2} \zeta ^*}-\frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _{2}z }{k_{1}}\), \(z\ge \zeta ^*\), then
and
Since \(\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q}<(\kappa _1+\kappa _2 s)\) for all \(s>\zeta ^*\), one has \(\frac{\mathrm{d}}{\mathrm{d} z}\mathcal {P}_1(z)<\frac{1}{\kappa _{1}+\kappa _{2}z}-\frac{1}{\Big (\kappa _{1}^{\frac{1}{q}}+{\kappa _{3}}^{\frac{1}{q}}z\Big )^{q}}<0,\, z>\zeta ^*.\) Therefore, \(\mathcal {P}_1\big (V(e(0))\big )<\mathcal {P}_1(\zeta ^*)=0\), i.e., \(T_{2}^{*}<{\tilde{T}}_2\). Additionally, noting that \(\mathcal {Q}(\zeta ^*)>0\), i.e., \(\frac{1}{\kappa _{2}}\ln \frac{\kappa _{1}+\kappa _{2}\zeta ^* }{\kappa _{1}}>\frac{1}{1-q} \big (\frac{\kappa _{1}}{\kappa _{3}}\big )^{\frac{1}{q}}\frac{1}{\kappa _{1}}\Big (\big (1+\big (\frac{\kappa _{3}}{\kappa _{1}}\big )^{\frac{1}{q}}\zeta ^*\big )^{1-q}-1\Big )\), we obtain \(\mathcal {P}_2(\zeta ^*)<0\). Hence, \(\mathcal {P}_2\big (V(e(0))\big )<\mathcal {P}_2(\zeta ^*)<0\) due to the fact that \(\frac{\mathrm{d}}{\mathrm{d} z}\mathcal {P}_2(z)<0\) for all \(z\ge \zeta ^*\). This implies that \(T_{2}^{*}<{\hat{T}}_2\).
Next, we will make a comparison among \(T_4^*\) and \({\tilde{T}}_4\), \({\hat{T}}_4\).
Denote \(\epsilon =\frac{1}{\kappa _{1}}\big (\frac{\kappa _{1}}{\kappa _{3}}\big )^{\frac{1}{q}}\), then we have
Let \(\varPsi (z)=\displaystyle \frac{q}{\kappa _{2}(q-1)}\ln \big (1+\kappa _{2} z \big )- \frac{q}{q-1} z\), \(z>0\), then by simple calculation, one obtains
This implies that \(\varPsi (z)\) is monotonic decreasing and \(\varPsi (z)<\varPsi (0)=0\) for all \(z>0\). Therefore, \(T_{4}^{*}< \tilde{T}_{4}\). Recall that the function \(H(z)=\displaystyle \frac{1}{\kappa _2}\ln \Big (1+\frac{\kappa _2}{\kappa _1}z\Big )\,+\, \frac{1}{\kappa _2(q-1)} \ln \frac{\kappa _3+\kappa _2 z^{1-q}}{\kappa _3}\), \(z>0\) reaches its smallest value at \(z^*=\big (\frac{\kappa _1}{\kappa _3}\big )^{\frac{1}{q}}\). We can get
Since \(\ln (1+z)<z\) for all \(z>0\), it follows that
Based on the analysis above, it can be concluded that \(T_{2}^{*}\le {\tilde{T}}_2\), \(T_{2}^{*}\le {\hat{T}}_2\) and \(T_{4}^{*}\le {\tilde{T}}_4\), \(T_{4}^{*}\le {\hat{T}}_4\).
Remark 4
In the research of FTT or FXT stability, a primary task is to determine the upper bound of settling time T(e(0)). In practice, the gap between the estimated settling time and the real time required to reach stability is always expected to be as small as possible. Naturally, a high-precision approximation of the settling time is a prerequisite for its real-world applications. In Lemma 4, by skillfully handling the corresponding proper integral or improper one, a new unified FTT/FXT stability result for system (3) is obtained. According to the above-mentioned comparisons, it is confirmed that the estimates of T(e(0)) in Lemma 4 are smaller than those given Lemmas 2 and 3. Namely, our estimate is more accurate than the previous results reported in [26] and [28].
Remark 5
Note that when \(\kappa _{2}\) tends to zero, the inequality (5) in Lemma 4 is degenerated into that in Lemma 2. By means of L’Hopital’s rule, one has
In addition, for \(0<q<1\), one obtains that \(\kappa _{2}^{\frac{q}{q-1}}\rightarrow +\infty\) when \(\kappa _{2}\rightarrow 0\). This means that when \(\kappa _{2}\rightarrow 0\), \(\kappa _{1}<q^{\frac{q}{1-q}}\kappa _{2}^{\frac{q}{q-1}}\kappa _{3}^{\frac{1}{1-q}}\) always holds for \(0<q<1\). Furthermore, when \(\kappa _{2}= 0\), recalling that the definition of \(\varPhi (s)\) in the proof of Lemma 4 gives \(\varPhi (s)=\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q}-\kappa _1\), and hence \(\frac{\mathrm{d}}{\mathrm{d} s} \varPhi (s)= q \kappa _{3}^{\frac{1}{q}}\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q-1}>0\) holds for any \(s\ge 0\). It follows from the fact \(\varPhi (0)=0\) that \(\varPhi (s)=\Big (\kappa _{1}^{\frac{1}{q}}+\kappa _{3}^{\frac{1}{q}}s\Big )^{q}-\kappa _1>0\) holds for all \(s> 0\). Consequently, according to (12), T(e(0)) can be evaluated as \(T(e(0))\le {T}_{2}^*=\frac{1}{1-q}\bigg (\frac{\kappa _1^{1-q}}{\kappa _3}\bigg )^{\frac{1}{q}}\Bigg (\bigg (1+\Big (\frac{\kappa _3}{\kappa _1}\Big )^{\frac{1}{q}}V(e(0)) \bigg )^{1-q}-1\Bigg )=\tilde{T}_{2}.\) By the above-mentioned discussion, it can be concluded that Lemma 2 can be considered as a special case of Lemma 4. Therefore, our FTT/FXT stability result improves and generalizes the previous one given in [26].
3 Main results
In this section, a novel control law is designed under which the FTT synchronization and FXT one of the drive-response network (1) and (2) can be analyzed concurrently. By the aid of Lemma 4, some unified sufficient criteria are obtained for the FTT/FXT synchronization of the drive-response network (1) and (2).
Theorem 1
Under Assumption 1, if the control law in the response network (2) is given as
and
in which \(d_i>0\), \(\gamma _1>0\), \(\gamma _2>0\), \(D=\mathrm{diag}\big (d_1,d_2,\ldots ,d_N \big )\), \(\tilde{A}^{(k)}=\frac{1}{2}\big ({A^{(k)}}^{\top }+A^{(k)}\big )\), and \(\varUpsilon (e_i(t))=0\), if \(||e_i(t)||=0\); \(\varUpsilon (e_i(t))=\big (e_i^\top (t)e_i(t)\big )^{-1}\), otherwise, then
- 1):
-
when \(\theta =1\), the drive-response network (1) and (2) is synchronized in finite time, and the estimate of the settling time \(T_5\) is
$$\begin{aligned} T_5\le T_5^*\triangleq \frac{1}{\varDelta _{2}}\ln \frac{\varDelta _{1}+2\gamma _2N+\varDelta _{2}V(e(0))}{\varDelta _{1}+2\gamma _2N}, \end{aligned}$$ - 2):
-
when \(0<\theta <1\), the drive-response network (1) and (2) is synchronized in finite time, and the estimate of the settling time \(T_6\) is as follows: ① If \(\varDelta _1<(1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\), then
$$\begin{aligned} T_6\le {T}_{6}^*\triangleq \left\{ \begin{aligned}&\frac{1}{\theta }\bigg (\frac{(\varDelta _1)^{\theta }}{2\gamma _2}\bigg )^{\frac{1}{1-\theta }}\Bigg (\bigg (1+\Big (\frac{2\gamma _2}{\varDelta _1}\Big )^{\frac{1}{1-\theta }}V(e(0)) \bigg )^{\theta }-1\Bigg ),&V(e(0))\le \zeta ^*,\\&\frac{1}{\theta }\bigg (\frac{(\varDelta _1)^{\theta }}{2\gamma _2}\bigg )^{\frac{1}{1-\theta }}\Bigg (\bigg (1+\Big (\frac{2\gamma _2}{\varDelta _1}\Big )^{\frac{1}{1-\theta }}\zeta ^* \bigg )^{\theta }-1\Bigg )\\&\quad \quad \quad \quad \quad \quad +\frac{1}{\varDelta _{2}}\ln \frac{\varDelta _{1}+2\gamma _2 {\big (\zeta ^*\big )}^{1-\theta }+\varDelta _{2}V(e(0))}{\varDelta _{1}+2\gamma _2 {\big (\zeta ^*\big )}^{1-\theta }+\varDelta _{2} \zeta ^*},&\quad V(e(0))> \zeta ^*, \end{aligned} \right. \end{aligned}$$② If \(\varDelta _1\ge (1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\), then
$$\begin{aligned} T_6\le {T}_{6}^*\triangleq \frac{1}{\varDelta _2}\ln \frac{\varDelta _{1}+\varDelta _{2}V(e(0))}{\varDelta _{1}}, \end{aligned}$$ - 3):
-
when \(\theta =0\), the drive-response network (1) and (2) is synchronized in finite time, and the estimate of the settling time \(T_7\) is
$$\begin{aligned} T_7\le {T}_{7}^*\triangleq \frac{1}{\varDelta _{2}+2\gamma _2}\ln \frac{\varDelta _{1}+(\varDelta _{2}+2\gamma _2)V(e(0))}{\varDelta _{1}}, \end{aligned}$$ - 4):
-
when \(\theta <0\), the drive-response network (1) and (2) is synchronized in fixed time, and the estimate of the settling time \(T_8\) is
$$\begin{aligned} T_8\le {T}_{8}^*\triangleq \frac{\theta -1}{\varDelta _{2}\theta }\ln \Bigg (1+\frac{\varDelta _{2}}{\varDelta _{1}}\bigg (\frac{\varDelta _{1}}{2\gamma _2 N^{\theta }}\bigg )^\frac{1}{1-\theta }\Bigg ), \end{aligned}$$where \(\zeta ^*>0\) is the unique positive root of the equation \(\Big (\big (\varDelta _{1}\big )^{\frac{1}{1-\theta }}+{\big (2\gamma _2\big )}^{\frac{1}{1-\theta }}s\Big )^{1-\theta }-\varDelta _1-\varDelta _2s=0\), \(\varDelta _1=2\gamma _1 N\), \(\varDelta _2=-2\lambda _{\max }\Big ( \big (\eta I_N-D\big )\otimes I_n+ \sum _{k=1}^{m} \big ({\tilde{A}}^{(k)} \otimes \varXi _k\big ) \Big )\), and \(V\big (e(0)\big )=\sum _{i=1}^{N}e_{i}^{\top }(0)e_{i}(0)\).
Proof
Let \(e(t)=\big (e_1^{\top }(t),e_2^{\top }(t),\ldots ,e_N^{\top }(t)\big )^{\top }\) and construct a Lyapunov function as follows:
According to Assumption 1, one has
- Case 1 \((\theta =1)\)::
-
It follows from (17) that
$$\begin{aligned} \frac{\mathrm{d}}{\mathrm{d} t} V\big (e(t)\big ) \le -\varDelta _1-\varDelta _2 V\big (e(t)\big )-2\gamma _2N. \end{aligned}$$(18)In light of Lemma 4-1), the drive-response network (1) and (2) is synchronized in finite time, and the settling time \(T_5\) satisfies
$$\begin{aligned} T_5\le T_5^*\triangleq \frac{1}{\varDelta _{2}}\ln \frac{\varDelta _{1}+2\gamma _2N+\varDelta _{2}V(e(0))}{\varDelta _{1}+2\gamma _2N}. \end{aligned}$$ - Case 2 \((0<\theta <1)\)::
-
From Lemma 1, one can deduce that
$$\begin{aligned} \frac{\mathrm{d}}{\mathrm{d} t} V\big (e(t)\big )\le & {} -\varDelta _1-\varDelta _2 V\big (e(t)\big )-2\gamma _2\, \Big (\sum _{i=1}^{N} e_{i}^{\top }(t)e_{i}(t)\Big )^{1-\theta }\nonumber \\= & {} -\varDelta _1-\varDelta _2 V\big (e(t)\big )-2\gamma _2 V^{1-\theta }\big (e(t)\big ). \end{aligned}$$(19)According to Lemma 4-2), the drive-response network (1) and (2) is synchronized in finite time, and when \(\varDelta _1<(1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\), and the settling time \(T_6\) is estimated by
$$\begin{aligned} T_6\le {T}_{6}^*\triangleq \left\{ \begin{aligned}&\frac{1}{\theta }\bigg (\frac{(\varDelta _1)^{\theta }}{2\gamma _2}\bigg )^{\frac{1}{1-\theta }}\Bigg (\bigg (1+\Big (\frac{2\gamma _2}{\varDelta _1}\Big )^{\frac{1}{1-\theta }}V(e(0)) \bigg )^{\theta }-1\Bigg ),&V(e(0))\le \zeta ^*,\\&\frac{1}{\theta }\bigg (\frac{(\varDelta _1)^{\theta }}{2\gamma _2}\bigg )^{\frac{1}{1-\theta }}\Bigg (\bigg (1+\Big (\frac{2\gamma _2}{\varDelta _1}\Big )^{\frac{1}{1-\theta }}\zeta ^* \bigg )^{\theta }-1\Bigg )\\&\quad \quad \quad \quad \quad \quad +\frac{1}{\varDelta _{2}}\ln \frac{\varDelta _{1}+2\gamma _2 {\big (\zeta ^*\big )}^{1-\theta }+\varDelta _{2}V(e(0))}{\varDelta _{1}+2\gamma _2 {\big (\zeta ^*\big )}^{1-\theta }+\varDelta _{2} \zeta ^*},&\quad V(e(0))> \zeta ^*, \end{aligned} \right. \end{aligned}$$where \(\zeta ^*>0\) is the unique positive root of the equation \(\Big (\big (\varDelta _{1}\big )^{\frac{1}{1-\theta }}+{\big (2\gamma _2\big )}^{\frac{1}{1-\theta }}s\Big )^{1-\theta }-\varDelta _1-\varDelta _2s=0\). Additionally, when \(\varDelta _1\ge (1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\), the settling time \(T_6\) is estimated by
$$\begin{aligned} T_6\le {T}_{6}^*\triangleq \frac{1}{\varDelta _2}\ln \frac{\varDelta _{1}+\varDelta _{2}V(e(0))}{\varDelta _{1}}. \end{aligned}$$ - Case 3 \((\theta =0)\)::
-
In this case, we have
$$\begin{aligned} \frac{\mathrm{d}}{\mathrm{d} t} V\big (e(t)\big ) \le -\varDelta _1-\varDelta _2 V\big (e(t)\big )-2\gamma _2 V\big (e(t)\big ). \end{aligned}$$(20)Based on Lemma 4-3), the drive-response network (1) and (2) is synchronized in finite time and the settling time \(T_7\) is determined by
$$\begin{aligned} T_7\le {T}_{7}^*\triangleq \frac{1}{\varDelta _{2}+2\gamma _2}\ln \frac{\varDelta _{1}+(\varDelta _{2}+2\gamma _2)V(e(0))}{\varDelta _{1}}, \end{aligned}$$Case 4 \((\theta <0)\): Employing Lemma 1, it yields that
$$\begin{aligned}&\frac{\mathrm{d}}{\mathrm{d} t} V\big (e(t)\big ) \le -\varDelta _1-\varDelta _2 V\big (e(t)\big )\nonumber \\&\quad -2\gamma _2 N^{\theta } V^{1-\theta }\big (e(t)\big ). \end{aligned}$$(21)By using lemma 4-4), the drive-response network (1) and (2) is synchronized in fixed time, and the estimate of the settling time \(T_8\) is given by
$$\begin{aligned} T_8\le {T}_{8}^*\triangleq \frac{\theta -1}{\varDelta _{2}\theta }\ln \Bigg (1+\frac{\varDelta _{2}}{\varDelta _{1}}\bigg (\frac{\varDelta _{1}}{2\gamma _2 N^{\theta }}\bigg )^\frac{1}{1-\theta }\Bigg ). \end{aligned}$$
This completes the proof of Theorem 1. \(\hfill\square\)
Remark 6
In light of Theorem 1, both the FTT and FXT synchronization of the drive-response network (1) and (2) are realized through the unified feedback controller (14) with different control parameters. Here, the parameter \(\theta\) plays a major role in determining the types of synchronization. Especially, when \(\theta\) belongs to the interval [0, 1], the FTT synchronization is realized and the settling time is related with the initial states. However, such relation will disappear once \(\theta <0\), and the FXT synchronization is then achieved. This means that the conversion between the FTT synchronization and FXT one can be accomplished through simply switching the value of \(\theta\) between [0, 1] and \((-\infty , 0)\), indicating the convenience and flexibility of our control protocol in applications.
From the definition of \({T}_{8}^*\), it is evident that the convergence time to FXT synchronization relies on the parameters \(\varDelta _1\), \(\varDelta _2\), \(\gamma _2\), and \(\theta\). It is not hard to find that \({T}_{8}^*\) is monotonously decreasing on \((0, +\infty )\) with respect to \(\varDelta _1\) or \(\gamma _2\). This, together with \(\varDelta _1=2\gamma _1N\), means that the larger the control parameter \(\gamma _1\) or \(\gamma _2\) is, the smaller \({T}_{8}^*\) is, i.e., the faster the convergence time is.
Denote
then
Set \(\sigma =\frac{\beta }{\varDelta _{1}}\Big (\frac{\varDelta _{1}}{2\gamma _{2} N^{\theta }}\Big )^{\frac{1}{1-\theta }}>0\), then one has
It is easy to see that \(\ln (1+\sigma )>\frac{\sigma }{1+\sigma }\) for all \(\sigma >0\), which means that \(\frac{\mathrm{d}}{\mathrm{d} \beta } \mathcal {H}(\beta )<0\) for all \(\beta >0\). Hence, \({T}_{8}^*\) is monotonously decreasing on \((0, +\infty )\) about \(\varDelta _2\), i.e., the larger \(\varDelta _{2}\) is, the smaller \({T}_{8}^*\) is.
In order to conveniently analyze the effect of the control parameter \(\theta\) on the convergence time to FXT synchronization, let
then
Since \(\varDelta _2\), \(\gamma _1\), \(\gamma _2\) > 0 and \(\theta <0\), then \(\frac{\mathrm{d}}{\mathrm{d} \theta } \mathcal {F}(\theta )>0\) if \(\gamma _1\ge \gamma _2\). This implies that when \(\gamma _1\ge \gamma _2\), \(\mathcal {F}(\theta )\) is monotonously increasing on \((-\infty , 0)\) with respect to \(\theta\), i.e., a larger \(\theta\) will lead to a larger \({T}_{8}^*\).
When \(\gamma _1< \gamma _2\), let \(\alpha =\big (\frac{\gamma _{1}}{\gamma _{2}}\big )^{\frac{1}{1-\theta }},\) then \(\frac{\gamma _{1}}{\gamma _{2}}<\alpha <1\) because \(\theta <0\), and \(\theta =\frac{1}{\ln \alpha }\big ( \ln \alpha -\ln (\gamma _1/\gamma _2) \big )\). In addition, \(\frac{\mathrm{d}}{\mathrm{d} \theta } \mathcal {F}(\theta )\) can be rewritten as
Denote
then
It follows that \(\dot{\mathcal {S}}(\alpha )\) is monotonically decreasing about \(\alpha\) and \(\dot{\mathcal {S}}({\tilde{\alpha }})=0\) with \({\tilde{\alpha }}=\frac{2\gamma _1}{2\gamma _2-\varDelta _2}\). This, together with \(\alpha \in \big (\frac{\gamma _{1}}{\gamma _{2}}, 1\big )\), yields the following three cases.
-
Case 1:
If \({\tilde{\alpha }}\le \frac{\gamma _{1}}{\gamma _{2}}\), i.e., \(\gamma _2< \frac{\varDelta _2}{2}\), then \(\dot{\mathcal {S}}(\alpha )<0\) on \((\frac{\gamma _{1}}{\gamma _{2}}, 1\big )\). Since \(\mathcal {S}(1)=\frac{1}{\varDelta _{2}}\ln \Big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\Big )+\frac{1}{2\gamma _{1}}\ln \frac{2\gamma _{1}+\varDelta _{2}}{2\gamma _{2}}>0\), \(\mathcal {S}(\alpha )>0\) holds for all \(\alpha \in \big (\frac{\gamma _{1}}{\gamma _{2}}, 1\big )\). Consequently, \(\frac{\mathrm{d}}{\mathrm{d} \theta } \mathcal {F}(\theta )>0\), i.e., \(\mathcal {F}(\theta )\) is monotonously increasing on \((-\infty , 0)\) about \(\theta\).
-
Case 2:
If \({\tilde{\alpha }}\ge 1\), i.e., \(\frac{\varDelta _2}{2} \le \gamma _2\le \gamma _1+\frac{\varDelta _2}{2}\), then \(\dot{\mathcal {S}}(\alpha )>0\) on \((\frac{\gamma _{1}}{\gamma _{2}}, 1\big )\). Accordingly, \(\mathcal {S}(\alpha )>0\) holds for all \(\alpha \in \big (\frac{\gamma _{1}}{\gamma _{2}}, 1\big )\) due to the fact that \(\mathcal {S}\big ( \frac{\gamma _{1}}{\gamma _{2}} \big )=\frac{1}{\varDelta _{2}}\big (1+\frac{\varDelta _{2}}{2\gamma _{2}}\big ) \ln \Big (1+\frac{\varDelta _{2}}{2\gamma _{2}}\Big )>0\). It shows that \(\frac{\mathrm{d}}{\mathrm{d} \theta } \mathcal {F}(\theta )>0\) and hence \(\mathcal {F}(\theta )\) is monotonously increasing about \(\theta \in (-\infty , 0)\).
-
Case 3:
If \(\frac{\gamma _{1}}{\gamma _{2}}<{\tilde{\alpha }}< 1\), i.e., \(\gamma _2> \gamma _1+\frac{\varDelta _2}{2}\), then \(\dot{\mathcal {S}}(\alpha )>0\) on \((\frac{\gamma _{1}}{\gamma _{2}}, {\tilde{\alpha }}\big )\) and \(\dot{\mathcal {S}}(\alpha )<0\) on \(( \tilde{\alpha }, 1\big )\). Recalling \(\mathcal {S}\big ( \frac{\gamma _{1}}{\gamma _{2}} \big )>0\) gives \(\mathcal {S}(\alpha )>0\) holds on \((\frac{\gamma _{1}}{\gamma _{2}}, {\tilde{\alpha }}\big )\) and \(\mathcal {S}(\tilde{\alpha })=\frac{1}{\varDelta _{2}}\ln \Big (1+\frac{\varDelta _{2}}{2\gamma _{2}-\varDelta _{2}}\Big )>0\). Since \(\mathcal {S}(1)=\frac{1}{\varDelta _{2}}\Big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\Big )\ln \Big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\Big )-\frac{1}{2\gamma _{1}}\ln \frac{\gamma _{2}}{\gamma _{1}}\) may be greater than or less than 0, the following two situations need to be discussed separately.
-
(1)
When \(\gamma _{2}\le \gamma _{1}\big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\big )^{\big (1+\frac{2\gamma _{1}}{\varDelta _{2}}\big )}\), i.e., \(\mathcal {S}(1)\ge 0\), then \(\mathcal {S}(\alpha )>0\) holds for all \(\alpha \in (\frac{\gamma _{1}}{\gamma _{2}}, 1)\), which results in \(\frac{\mathrm{d}}{\mathrm{d} \theta } \mathcal {F}(\theta )>0\) and therefore \(\mathcal {F}(\theta )\) is monotonically increasing with increasing \(\theta \in (-\infty ,0)\).
-
(2)
When \(\gamma _{2}> \gamma _{1}\big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\big )^{\big (1+\frac{2\gamma _{1}}{\varDelta _{2}}\big )}\), i.e., \(\mathcal {S}(1)< 0\), then there exists only one \(\alpha ^{*}\in ({\tilde{\alpha }},1)\) such that \(\mathcal {S}(\alpha )>0\) on \((\tilde{\alpha },\alpha ^*)\) and \(\mathcal {S}(\alpha )<0\) on \((\alpha ^*,1)\), where \(\alpha ^*\in \big (\frac{2\gamma _1}{2\gamma _2-\varDelta _2}, 1\big )\) is the unique positive root of the equation \(\frac{1}{\varDelta _2} \Big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\alpha \Big )\ln \Big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\alpha \Big )-\frac{\alpha }{2 \gamma _1} \ln \alpha +\frac{\alpha }{2 \gamma _1}\ln \Big (\frac{\gamma _1}{\gamma _2} \Big )=0\). Considering that \(\alpha =\big (\frac{\gamma _{1}}{\gamma _{2}}\big )^{\frac{1}{1-\theta }}\, (\theta <0)\), i.e., \(\alpha\) is monotonically decreasing about \(\theta\), \(\theta \in (-\infty ,\theta ^*)\) brings in \(\alpha \in\) \((\alpha ^*,1)\) and \(\theta \in (\theta ^*, 0)\) brings in \(\alpha \in\) \((\frac{\gamma _{1}}{\gamma _{2}},\alpha ^*)\), where \(\theta ^*=\frac{\ln \frac{\gamma _{2}}{\gamma _{1}}\alpha ^*}{\ln \alpha ^*}\). This implies that \(\frac{\mathrm{d}}{\mathrm{d} \theta } \mathcal {F}(\theta )<0\) holds on \((-\infty ,\theta ^*)\) and \(\frac{\mathrm{d}}{\mathrm{d} \theta } \mathcal {F}(\theta )>0\) holds on \((\theta ^*,0)\). That is to say, \(\mathcal {F}(\theta )\) is monotonically decreasing on \((-\infty ,\theta ^*)\) and monotonically increasing on \((\theta ^*,0)\).
For convenience, the foregoing conclusion is summarized in the following remark.
Remark 7
From the definition of \({T}_{8}^*\), it is not hard to find that \({T}_{8}^*\) is monotonously decreasing on \((0, +\infty )\) about \(\varDelta _1\), \(\varDelta _2\) or \(\gamma _2\), which means that the larger the control parameter \(\varDelta _1\), \(\varDelta _2\) or \(\gamma _2\) is, the smaller \({T}_{8}^*\) is, i.e., the faster the convergence time to FXT synchronization is. Additionally, when \(\gamma _2> \gamma _1+\frac{\varDelta _2}{2}\) and \(\gamma _{2}> \gamma _{1}\big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\big )^{\big (1+\frac{2\gamma _{1}}{\varDelta _{2}}\big )}\), \({T}_{8}^*\) is monotonically decreasing on \((-\infty ,\theta ^*)\) and monotonically increasing on \((\theta ^*,0)\), where \(\theta ^*=\frac{\ln \frac{\gamma _{2}}{\gamma _{1}}\alpha ^*}{\ln \alpha ^*}\) and \(\alpha ^*\in \big (\frac{2\gamma _1}{2\gamma _2-\varDelta _2}, 1\big )\) is the unique positive root of the equation \(\frac{1}{\varDelta _2} \Big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\alpha \Big )\ln \Big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\alpha \Big )-\frac{\alpha }{2 \gamma _1} \ln \alpha +\frac{\alpha }{2 \gamma _1}\ln \Big (\frac{\gamma _1}{\gamma _2} \Big )=0\); otherwise, \({T}_{8}^*\) is monotonically increasing with increasing \(\theta \in (-\infty ,0)\). Therefore, when \(\gamma _2> \gamma _1+\frac{\varDelta _2}{2}\) and \(\gamma _{2}> \gamma _{1}\big (1+\frac{\varDelta _{2}}{2\gamma _{1}}\big )^{\big (1+\frac{2\gamma _{1}}{\varDelta _{2}}\big )}\), \({T}_{8}^*(\theta )\) has its minimum value at \(\theta ^*=\frac{\ln \frac{\gamma _{2}}{\gamma _{1}}\alpha ^*}{\ln \alpha ^*}\), i.e., \({T}_{8}^*\) first decreases and then increases with the increasing \(\theta\), which means that, with increasing the control parameter \(\theta\), the convergence time to FXT synchronization is fast first and then become slow; otherwise, the larger \(\theta\) is, the larger the control parameter \({T}_{8}^*\) is, i.e., the slower the convergence time to FXT synchronization is.
As for \({T}_{6}^*\), when \(\varDelta _1\ge (1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\), it is easy to verify that \({T}_{6}^*\) is monotonously decreasing on \((0, +\infty )\) about \(\varDelta _1\) or \(\varDelta _2\), and hence a larger \(\varDelta _1\) or \(\varDelta _2\) will cause a smaller \({T}_{6}^*\), i.e., a faster convergence time to FTT synchronization.
When \(\varDelta _1< (1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\) and \(V(e(0))\le \zeta ^*\), let \(\varrho _1=\varDelta _{1}^{\frac{1}{1-\theta }}\), then
It follows that
Since \(1+\big (2\gamma _{2}\big )^{\frac{1}{1-\theta }}\varrho _1^{-1}V(e(0))>1\) and \(0<\theta <1\), \(\Big (1+\big (2\gamma _{2}\big )^{\frac{1}{1-\theta }}\varrho _1^{-1}V(e(0))\Big )^{\theta -1}-1<0\), which follows \(\frac{\mathrm{d}}{{ \mathrm d} \varrho _1} \mathfrak {F}(\varrho _1)<0\). Hence, recalling that \(\varrho _1=\varDelta _{1}^{\frac{1}{1-\theta }}\), it results \({T}_{6}^*\) is monotonously decreasing on \((0, +\infty )\) about \(\varDelta _1\). Similarly, denote \(\varrho _2=\Big (\frac{2\gamma _{2}}{\varDelta _{1}}\Big )^{\frac{1}{1-\theta }}\), then
Accordingly,
Let \({\tilde{\varrho }}=\varrho _2 V(e(0))\) and \(\mathfrak {J}(\tilde{\varrho })=-(1+{\tilde{\varrho }})^{\theta }+1+\theta {\tilde{\varrho }} (1+{\tilde{\varrho }})^{\theta -1}\), \({\tilde{\varrho }}> 0\). Then, we can get
Since \(\mathfrak {J}({\tilde{\varrho }})=0\), it results \(\mathfrak {J}({\tilde{\varrho }})<0\) for all \({\tilde{\varrho }}>0\) and hence \(\frac{\mathrm{d}}{\mathrm{d} \varrho _2} \mathfrak {H}(\varrho _2)<0\). This, together with \(\varrho _2=\Big (\frac{2\gamma _{2}}{\varDelta _{1}}\Big )^{\frac{1}{1-\theta }}\), yields that \({T}_{6}^*\) is monotonously decreasing about \(\gamma _{2}\in (0, +\infty )\). It should be noted that the mathematical relation between \({T}_{6}^*\) and \(\theta\) is too complicated to analyze how \({T}_{6}^*\) changes with \(\theta\), which can only be illustrated numerically.
When \(\varDelta _1< (1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\) and \(V(e(0))> \zeta ^*\), it is clear that \({T}_{6}^*\) depends on not only the parameters \(\varDelta _1\), \(\varDelta _2\), \(\gamma _2\), and \(\theta\), but also on \(\zeta ^*\). It is noted that \(\zeta ^*\), as a root of the equation \(\big ((\varDelta _{1})^{\frac{1}{1-\theta }}+{(2\gamma _2)}^{\frac{1}{1-\theta }}s\big )^{1-\theta }-\varDelta _1-\varDelta _2s=0\), is difficult to be solved analytically, and meanwhile \(\zeta ^*\) is also associated with the parameters \(\varDelta _1\), \(\varDelta _2\), \(\gamma _2\), and \(\theta\). Therefore, it is unclear how does the parameter \(\varDelta _1\), \(\varDelta _2\), \(\gamma _2\) or \(\theta\) affect \({T}_{6}^*\). We will reveal how \({T}_{6}^*\) is changed through the main control parameter \(\theta\) numerically.
The following remark sums up the aforementioned analysis.
Remark 8
When \(\varDelta _1\ge (1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\), one can easily verify that \({T}_{6}^*\) is monotonously decreasing about \(\varDelta _1\) or \(\varDelta _2\), and hence a larger \(\varDelta _1\) or \(\varDelta _2\) will cause a smaller \({T}_{6}^*\), i.e., a faster convergence time to FTT synchronization. When \(\varDelta _1< (1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\) and \(V(e(0))\le \zeta ^*\), \({T}_{6}^*\) shows a monotonic decrease with increasing \(\varDelta _1\) or \(\gamma _2\), that is to say, the convergence time to FTT synchronization become faster with increasing the control parameter \(\varDelta _1\) or \(\gamma _2\). However, we are unable to determine how \({T}_{6}^*\) changes with \(\theta\) due to the complex relation between \({T}_{6}^*\) and \(\theta\). Similarly, when \(\varDelta _1< (1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\) and \(V(e(0))> \zeta ^*\), it is also unclear how does the parameter \(\varDelta _1\), \(\varDelta _2\), \(\gamma _2\) or \(\theta\) affect \({T}_{6}^*\). We will reveal how \({T}_{6}^*\) is changed through the main control parameter \(\theta\) numerically.
For simplicity, let \(d_i=\eta +\sum _{k=1}^{m}\lambda _{\max } \big ({\tilde{A}}^{(k)} \otimes \varXi _k\big )+\varpi\), \(i=1,2,\ldots ,N\), where \(\varpi >0\) is a constant, then the condition (15) holds. Hence, on the basis of Theorem 1, the corollary below is true.
Corollary 1
Under Assumption 1 and the control law (2), if \(d_i\) is taken as \(d_i=\eta +\sum _{k=1}^{m}\lambda _{\max } \big ({\tilde{A}}^{(k)} \otimes \varXi _k\big )+\varpi\), \(i=1,2,\ldots ,N\), where \(\varpi >0\) is a constant, then
- 1):
-
when \(\theta =1\), the drive-response network (1) and (2) reaches synchronization in finite time, and the estimate of the settling time \(T_5\) is
$$\begin{aligned} T_5\le T_5^*\triangleq \frac{1}{2 \varpi }\ln \frac{\varDelta _{1}+2\gamma _2N+2 \varpi V(e(0))}{\varDelta _{1}+2\gamma _2N}, \end{aligned}$$ - 2):
-
when \(0<\theta <1\), the drive-response network (1) and (2) reaches synchronization in finite time, and the estimate of the settling time \(T_6\) is as follows: ① If \(\varDelta _1<(1-\theta )^{\frac{1-\theta }{\theta }}(2 \varpi )^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\), then
$$\begin{aligned} T_6\le {T}_{6}^*\triangleq \left\{ \begin{aligned}&\frac{1}{\theta }\bigg (\frac{(\varDelta _1)^{\theta }}{2\gamma _2}\bigg )^{\frac{1}{1-\theta }}\Bigg (\bigg (1+\Big (\frac{2\gamma _2}{\varDelta _1}\Big )^{\frac{1}{1-\theta }}V(e(0)) \bigg )^{\theta }-1\Bigg ),&V(e(0))\le \zeta ^*,\\&\frac{1}{\theta }\bigg (\frac{(\varDelta _1)^{\theta }}{2\gamma _2}\bigg )^{\frac{1}{1-\theta }}\Bigg (\bigg (1+\Big (\frac{2\gamma _2}{\varDelta _1}\Big )^{\frac{1}{1-\theta }}\zeta ^* \bigg )^{\theta }-1\Bigg )\\&\quad \quad \quad \quad \quad \quad +\frac{1}{2\varpi }\ln \frac{\varDelta _{1}+2\gamma _2 {\big (\zeta ^*\big )}^{1-\theta }+2\varpi V(e(0))}{\varDelta _{1}+2\gamma _2 {\big (\zeta ^*\big )}^{1-\theta }+2\varpi \zeta ^*},&\quad V(e(0))> \zeta ^*, \end{aligned} \right. \end{aligned}$$② If \(\varDelta _1\ge (1-\theta )^{\frac{1-\theta }{\theta }}(2\varpi )^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\), then
$$\begin{aligned} T_6\le {T}_{6}^*\triangleq \frac{1}{2\varpi }\ln \frac{\varDelta _{1}+2\varpi V(e(0))}{\varDelta _{1}}, \end{aligned}$$ - 3):
-
when \(\theta =0\), the drive-response network (1) and (2) is synchronized in finite time, and the estimate of the settling time \(T_7\) is
$$\begin{aligned} T_7\le {T}_{7}^*\triangleq \frac{1}{2\varpi +2\gamma _2}\ln \frac{\varDelta _{1}+(2\varpi +2\gamma _2)V(e(0))}{\varDelta _{1}}, \end{aligned}$$ - 4):
-
when \(\theta <0\), the drive-response network (1) and (2) is synchronized in fixed time, and the estimate of the settling time \(T_8\) is
$$\begin{aligned} T_8\le {T}_{8}^*\triangleq \frac{\theta -1}{2\varpi \theta }\ln \Bigg (1+\frac{2\varpi }{\varDelta _{1}}\bigg (\frac{\varDelta _{1}}{2\gamma _2 N^{\theta }}\bigg )^\frac{1}{1-\theta }\Bigg ), \end{aligned}$$where \(\zeta ^*>0\) is the unique positive root of the equation \(\Big (\big (\varDelta _{1}\big )^{\frac{1}{1-\theta }}+{\big (2\gamma _2\big )}^{\frac{1}{1-\theta }}s\Big )^{1-\theta }-\varDelta _1-2\varpi s=0\), \(\varDelta _1=2\gamma _1 N\), and \(V\big (e(0)\big )=\sum _{i=1}^{N}e_{i}^{\top }(0)e_{i}(0)\).
For given drive-response network (1) and (2) fulfilling Assumption 1, to illustrate how to design the controller (14) in actual applications to achieve the FXT synchronization, the following procedure is given:
- Step 1.:
-
Compute the values of \(\eta\) and \(\lambda _{\max }\big (\tilde{A}^{(k)}\otimes \varXi _{k}\big )\ (k=1,2,\ldots ,m)\) in light of the function and parameters of the given drive-response network (1) and (2).
- Step 2.:
-
Select an appropriate constant \(\varpi >0\), and let \(d_{i}=\eta +\sum _{k=1}^{m}\lambda _{max}\big (\tilde{A}^{(k)}\otimes \varXi _{k}\big )+\varpi\) \((i=1,2,...,N)\) such that the condition (15) holds.
- Step 3.:
-
According to Remark 7, choose suitable control parameters \(\gamma _{1},\ \gamma _{2}\) and \(\theta\) such that the estimated settling time \(T_8^*\) meets the practical requirement.
- Step 4.:
-
Based on the above selected \(d_i\) \((i=1,2,...,N)\), \(\gamma _{1},\ \gamma _{2}\) and \(\theta\), design the controller (14).
Remark 9
In [22,23,24,25,26,27,28,29,30], some important works on the FTT and/or FXT synchronization have been reported. Unfortunately, all the studies were only concerned with single-weighted dynamical networks. Considering that a number of real-word dynamical networks can be more accurately modeled as MWDNs [31,32,33], in this paper a general model of MWDNs is introduced, and then, by establishing a new lemma on FTT/FXT stability of nonlinear dynamical systems (Lemma 4) and designing a unified control protocol (14), criteria for the FTT or FXT synchronization are derived simultaneously. Hence, our results are new and more general to the previous results [22,23,24,25,26,27,28,29,30]. In addition, with respect to the controller design, signum function is often indispensable for guaranteeing dynamical networks to be finite-timely or fixed-timely synchronized [22,23,24,25,26,27,28,29,30, 33, 37,38,39,40]. Significantly, it can be observed from (14) that signum function is not involved in our designed controllers. As the unexpected chattering generated from the signum function will be effectively avoided, our control method has great superiority in practical applications compared with the existing results in [22,23,24,25,26,27,28,29,30, 33, 37,38,39,40].
Remark 10
From the inequalities (19) and (21), the following different estimates of the settling time for the FTT or FXT synchronization can be deduced by utilizing Lemma 2 or Lemma 3
Using the same analysis method as before, one can prove that \(T_{6}^{*}\le \tilde{T}_{6}\), \(T_{6}^{*}\le \hat{T}_{6}\), and \(T_{8}^{*}\le \tilde{T}_{8}\), \(T_{8}^{*}\le \hat{T}_{8}\). This implies that the assessed settling time in this paper is less conservative than those given in [26] and [28], which will be confirmed by numerical simulations.
Remark 11
In [33, 37,38,39,40], by means of different control schemes, the FTT or FXT synchronization of MWDNs was explored, respectively. Unfortunately, most of the present schemes need signum function to realize the control goal, and moreover, the results of FTT or FXT synchronization cannot be obtained concurrently. In order to fill the gap, a unified control protocol (14) excluding signum function is designed in this paper, and it is shown that, under the same condition (15), the addressed MWDNs can, respectively, realize FTT and FXT synchronization by only switching the value of \(\theta\) between [0, 1] and \((-\infty , 0)\). Therefore, our control strategy is more practical and convenient in applications compared with those in [33, 37,38,39,40].
Remark 12
In [28], in order to ensure the drive-response network (1) and (2) can realize the FTT or FXT synchronization, the following controller for the ith node was designed
where \(\varrho =\frac{m_1}{m_2}\) with \(m_1,m_2\) being positive odd integers. From the control inputs (14) and (22), one can observe that \(\theta\) is only required to fulfill \(\theta \le 1\), while \(\varrho\) must satisfy \(\varrho =\frac{m_1}{m_2}> 0\), where \(m_1\) and \(m_2\) are positive odd integers. Therefore, our control scheme has wider applicability than that designed in [28]. Furthermore, the settling times for the FTT or FXT synchronization in this paper are evaluated based on Lemma 4, while in [28], those are estimated on the basis of Lemma 3. According to Remark 10, it is clear that the estimates of settling time for the FTT or FXT synchronization herein are more precise than those presented in [28]. Hence, our theoretical results improve the corresponding results in [28].
Remark 13
Considering that dynamical systems with discontinuous dynamics can be seen everywhere such as dry friction system, mechanical devices, impacting machines, and discontinuous neural networks [26, 55], it is more meaningful to investigate multi-weighted networks composed of discontinuous dynamical systems. In this paper, for simplicity’s sake, the node dynamics in the network (1) is assumed to be continuous. By referring to Refs. [26] and [49], the results presented in this paper can actually be extended to complex networks with discontinuous node dynamics and multi-weights. In addition, it is noted that the type of synchronization discussed in this paper is known as outer synchronization [56]. Indeed, identical to the proof of Theorem 1, we can obtain similar results for FTT or FXT synchronization in a MWDN (also called FTT or FXT inner synchronization [26, 56]).
4 Numerical simulations
In this section, a numerical example, together with its simulations, is provided to validate the effectiveness of the proposed theoretical results.
Consider a MWDN (1) consisting of 15 nodes and 2 weights described below:
where the dynamics of each uncoupled node is chosen as the following Chua’s circuit [11]:
in which \(h(x_{i1})=-0.68x_{i1}-0.295(|x_{i1}+1|-|x_{i1}-1|)\), \(i=1,2,...,15\). It has been verified in [11] that system (24) can satisfy Assumption 1 with \(\eta =9.062\). For the convenience of analysis, the inner-connection matrices \(\varXi _1\) and \(\varXi _2\) are set to be \(\varXi _1=\varXi _2=I_3\). In addition, the topological structure of the network (23) is presented in Fig. 2, and the coupling weight matrices \(A^{(1)}\) and \(A^{(2)}\) associated with Fig. 2 are

Topological structure of the network (23), where edges with different colours denote different coupling forms and the number beside each edge represents the connection weight
The response MWDN corresponding to the drive network (23) is described as:
which possesses the same parameters with the network (23), and \(u_{i}(t)\) is the control input described by Eq. (14).
First, we discuss the FTT synchronization of the drive-response network (23) and (25). The initial values of the drive-response network (23) and (25) are selected randomly on the interval [0, 2]. A simple calculation shows \(\lambda _{\max } \big ({\tilde{A}}^{(1)} \otimes \varXi _1\big )=0.1928\), \(\lambda _{\max } \big ({\tilde{A}}^{(2)} \otimes \varXi _2\big )= 0.1442\), and \(V(e(0))=23.7053\). Let \(d_1=d_2=\cdots =d_{15}=10.3991\), \(\gamma _1=0.2\), \(\gamma _2=3\), and \(\theta =0.6\), then the condition (15) holds. According to Theorem 1, the drive-response network (23) and (25) is finite-timely synchronized. For this case, it is easy to get \(\varDelta _1=6\), \(\varDelta _2=2\), and \(\zeta ^*= 0.769\). Since \(\varDelta _1<(1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _2)^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}=6.7755\) and \(V(e(0))>\zeta ^*\), it can be calculated that \(T_6^*=0.8704\). Additionally, based on Remark 10, one can obtain that \({\tilde{T}}_6=1.6249\) and \({\hat{T}}_6=1.0931\). Figure 3 shows the time response of the synchronous errors \(e_i(t)\), \(i=1,2,\ldots ,15\), in which three solid points, marked as red, pink, and black, denote three different estimations of the settling time \(T_6^*\), \({\hat{T}}_6\), and \({\tilde{T}}_6\), respectively. It can observed from Fig. 3 that the drive-response network (23) and (25) indeed achieves FTT synchronization, and our estimate (\(T_{6}^{*}\)) is more accurate than those (\(\tilde{T}_{6}\) and \(\hat{T}_{6}\)) calculated utilizing the approaches in [26] and [28], confirming the validity of the theoretical analysis.

In order to study the influence of the control parameter \(\theta\) on the convergence time to the FTT synchronization, according to Remark 8, we focus on the interesting situation that \(\theta\) satisfies \(\varDelta _1< (1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\) and \(V(e(0))> \zeta ^*\). To this end, we remain other control parameters unchanged and obtain \(0.3183<\theta <0.666\). Then, we vary \(\theta\) from 0.32 to 0.66 and plot the relation curve between the settling time \(T_6^*\) and the control parameter \(\theta\) based on Theorem 1 in Fig. 4. One can observe from Fig. 4 that \(T_6^*\) tends to decrease first and then increase with the increase of \(\theta\), and \(T_6^*\) reaches its minimum value at \(\theta =0.5125\), which implies that the convergence time to the FTT synchronization is faster first and then becomes slower as the control parameter \(\theta\) increases. Particularly, when \(\theta =0.35,\,0.5125\) and 0.65, the corresponding \(T_6^*\) are 0.8983, 0.8567 and 0.9192, respectively. Figure 5 depicts the time response of the synchronous errors \(e_i(t)\), \(i=1,2,\ldots ,15\) of the drive-response network (23) and (25) under the controller (14) with three different values of \(\theta\), where the remaining parameters and initial condition are the same as mentioned above. The numerical results in Fig. 5a–c demonstrate the validity of the analysis hereinbefore.

The relation curve between the settling time \(T_6^*\) and the control parameter \(\theta\), when \(\theta\) satisfies \(\varDelta _1< (1-\theta )^{\frac{1-\theta }{\theta }}(\varDelta _{2})^{\frac{\theta -1}{\theta }}\big (2\gamma _2 \big )^{\frac{1}{\theta }}\) and \(V(e(0))> \zeta ^*\)

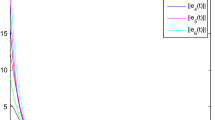
Next, the FXT synchronization of the drive-response network (23) and (25) is considered. Choose \(\theta =-1\), the remaining control parameters and the initial values are the same as above. Obviously, the condition (15) is satisfied, and therefore the FXT synchronization is ensured based on Theorem 1. By computation, \(T_{8}^{*}=0.8290\), \(\tilde{T}_{8}=1.2910\), and \(\hat{T}_{8}=2.6438\). The corresponding numerical simulation is exhibited in Fig. 6, where \(T_{8}^{*}\), \(\tilde{T}_{8}\), and \(\hat{T}_{8}\) are marked as three solid points with red, black, and pink, respectively. Figure 6 clearly reveals that the FXT synchronization is reached, and the estimate given in this paper (\(T_{8}^{*}\)) is less conservative than those (\(\tilde{T}_{8}\) and \(\hat{T}_{8}\)) obtained via the methods in [26] and [28], consistent with our theoretical analysis.

For illustrating the effect of the control parameter \(\theta\) on the convergence time to the FXT synchronization, on the basis of Remark 7, we keep other control parameters unaltered, then we choose \(\theta\) from \(-5\) to \(-0.2\) and draw the corresponding \(T_8^*\) in Fig. 7. From Fig. 7, it is observed that with increasing \(\theta\), \(T_8^*\) first decreases gradually and then increases relatively quickly and has a minimum value at \(\theta =-1.323\). This means that the convergence time to the FXT synchronization becomes gradually faster with increasing the control parameter \(\theta\) and then becomes slower relatively rapidly. To indicate this, \(\theta =-2.5\), \(\theta =-1.323\) and \(\theta =-0.3\) are involved in numerical simulations and Fig. 8 is given, where the other parameters and initial values have the same values as those given above and the corresponding \(T_8^*\) are 0.8371, 0.8247 and 1.0489, respectively. The simulations results presented in Fig. 8 are in good accordance with the discussion in Remark 7.
Finally, in order to demonstrate the estimated settling time of the FTT synchronization is related to the initial states of the drive-response network (23) and (25), while that of the FXT synchronization is not, we retain all control parameters unchanged and choose the initial states of the drive-response network (23) and (25) randomly on the interval [0, 10], [0, 20] and [0, 30], respectively. Figure 9 depicts the time response of the total synchronization error \(E(t)=\sqrt{\sum _{i=1}^{15} ||y_i(t)-x_i(t)||^2}\) of the drive-response network (23) and (25) with three different sets of initial states, where all control parameters are the same as above. By comparing the simulation results in Fig. 9 (a) and (b), it can be found that the estimated settling time \(T_6^*\) of the FTT synchronization is different for different initial states, while the estimated settling time \(T_8^*\) of the FXT synchronization is invariant for different initial states, confirming the effectiveness of the theoretical analysis.

The relation curve between the settling time \(T_8^*\) and the control parameter \(\theta\)


5 Conclusion
In this paper, a class of multi-weighted dynamical networks (MWDNs) is addressed. Firstly, as a new result, Lemma 4 is proposed to concurrently establish the finite-time (FTT) stability and fixed-time (FXT) one for nonlinear dynamical systems, wherein a smaller estimation of the settling time is offered in comparison with those provided in [26, 28]. Secondly, a unified novel feedback controller without signum function is designed aiming at avoiding chattering phenomenon, based on which some synchronization criteria are established for the considered MWDNs, which show that both FTT synchronization and FXT one can be realized and the conversion between them could be accomplished through simply adjusting a main control parameter. Moreover, a detailed analysis about how the settling time changes with the primary control parameters is carried out. Finally, the effectiveness of the derived theoretical results is validated by a simulation example.
It is noted that, for achieving FTT or FXT synchronization of the MWDN (1), the controller (14) needs to be added to all network nodes, which is high energy consumption and even infeasible for large-scale dynamical networks. Therefore, it would be of great interest to explore the problem of FTT or FXT synchronization for MWDNs by controlling partial network nodes. This meaningful problem will be addressed in our future research.
Recently, time delays and stochastic disturbances were discussed in the literature and some excellent results were obtained [25, 27, 43, 51]. However, it seems that there is no published work on FTT/FXT synchronization for MWDNs with time delays and/or stochastic disturbances. Therefore, it is interesting to apply the unified control method developed in this paper to investigate the FTT synchronization and FXT one for MWDNs with time delays and/or stochastic disturbances simultaneously. This important issue should be researched in the future.
Data availability
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
Chen G, Wang X, Li X (2012) Introduction to complex networks: models structure and dynamics. High Education Press, Beijing
Cimini G, Squartini T, Saracco F, Garlaschelli D, Gabrielli A, Caldarelli G (2019) The statistical physics of real-world networks. Nat Rev Phys 1:58–71
Boccaletti S, Pisarchik AN, Del Genio ID, Amann A (2018) Synchronization: from coupled systems to complex networks. Cambridge University Press, Cambridge
Rubenstein M, Cornejo A, Nagpal R (2014) Programmable self-assembly in a thousand-robot swarm. Science 345:795–799
Cai S, He Q, Hao J, Liu Z (2010) Exponential synchronization of complex networks with nonidentical time-delayed dynamical nodes. Phys Lett A 374:2539–2550
Zhou P, Shi J, Cai S (2020) Pinning synchronization of directed networks with delayed complex-valued dynamical nodes and mixed coupling via intermittent control. J Frankl Inst 357:12840–12869
Shen Y, Shi J, Cai S (2021) Exponential synchronization of directed bipartite networks with node delays and hybrid coupling via impulsive pinning control. Neurocomputing 453:209–222
Sun M, Lyu D, Jia Q (2022) Event-triggered leader-following synchronization of delayed dynamical networks with intermittent coupling. Neural Comput Appl 34:6163–6170
Cai S, Zhou P, Liu Z (2014) Pinning synchronization of hybrid-coupled directed delayed dynamical network via intermittent control. Chaos Interdiscip J Nonlin Sci 24(3):033102
Cai S, Zhou P, Liu Z (2015) Synchronization analysis of hybrid-coupled delayed dynamical networks with impulsive effects: a unified synchronization criterion. J Frankl Inst 352:2065–2089
Zhou P, Cai S, Shen J, Liu Z (2018) Adaptive exponential cluster synchronization in colored community networks via aperiodically intermittent pinning control. Nonlin Dyn 92:905–921
Jiang S, Lu X, Xie C, Cai S (2017) Adaptive finite-time control for overlapping cluster synchronization in coupled complex networks. Neurocomputing 266:188–195
Jia Q, Han Z, Tang WKS (2019) Synchronization of multi-agent systems with time-varying control and delayed communications. IEEE Trans Circ Syst I Regul Pap 66(11):4429–4438
Mwanandiye ES, Wu B, Jia Q (2020) Synchronization of delayed dynamical networks with multi-links via intermittent pinning control. Neural Comput Appl 32:11277–11284
Cai S, Hou M (2021) Quasi-synchronization of fractional-order heterogeneous dynamical networks via aperiodic intermittent pinning control. Chaos Solitons Fract 146:110901
Jia Q, Bram AK, Han Z (2021) Synchronization of drive-response networks with event-based pinning control. Neural Comput Appl 33:8649–8658
Jiang B, Hu Q, Friswell MI (2016) Fixed-time attitude control for rigid spacecraft with actuator saturation and faults. IEEE Trans Control Syst Technol 24(5):1892–1898
Ni J, Liu L, Hu X, Li S (2017) Fast fixed-time nonsingular terminal sliding mode control and its application to chaos suppression in power system. IEEE Trans Circ Syst II Exp Briefs 64(2):151–155
Haimo VT (1986) Finite time controllers. SIAM J Control Optim 24(4):760–770
Polyakov A (2012) Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans Autom Control 57(8):2106–2110
Polyakov A, Efimov D, Perruquetti W (2015) Finite-time and fixed-time stabilization: implicit Lyapunov function approach. Automatica 51:332–340
Lu W, Liu X, Chen T (2016) A note on finite-time and fixed-time stability. Neural Netw 81:11–15
Liu X, Chen T (2018) Finite-time and fixed-time cluster synchronization with or without pinning control. IEEE Trans Cybern 48(1):240–252
Cai S, Zhou F, He Q (2019) Fixed-time cluster lag synchronization in directed heterogeneous community networks. Physica A 525:128–142
Li J, Jiang H, Hu C, Yu Z (2018) Multiple types of synchronization analysis for discontinuous Cohen-Grossberg neural networks with time-varying delays. Neural Netw 99:101–113
Ji G, Hu C, Yu J, Jiang H (2018) Finite-time and fixed-time synchronization of discontinuous complex networks: a unified control framework design. J Frankl Inst 355:4665–4685
Liu X, Ho DWC, Song Q, Xu W (2019) Finite/fixed-time pinning synchronization of complex networks with stochastic disturbances. IEEE Trans Cybern 49(6):2398–2403
Xu Y, Wu X, Mao B, Xie C (2021) A unified finite-/fixed-time synchronization approach to multi-layer networks. IEEE Trans Circ Syst II Exp Briefs 1(68):311–315
Duan L, Shi M, Huang C, Fang X (2021) Synchronization in finite-/fixed-time of delayed diffusive complex-valued neural networks with discontinuous activations. Chaos,Solitons Fract 142:110386
Xiao J, Zeng Z, Wen S, Wu A, Wang L (2021) A unified framework design for finite-time and fixed-time synchronization of discontinuous neural networks. IEEE Trans Cybern 51(6):3004–3016
Katchinskiy N, Goez HR, Dutta I, Godbout R, Elezzabi AY (2016) Novel method for neuronal nanosurgical connection. Sci Rep 6:20529
An XL, Zhang L, Li YZ, Zhang JG (2014) Synchronization analysis of complex networks with multi-weights and its application in public traffic network. Physica A 412:149–156
Qiu SH, Huang YL, Ren SY (2018) Finite-time synchronization of multi-weighted complex dynamical networks with and without coupling delay. Neurocomputing 275:1250–1260
Jin J, Lu HX, Wang SJ (2009) Research on power management using double-weight neural network. Microcomp Infor 25:197–199
Zou H, Chu W, Xu J, Zhang J, Wang Z (2012) Application of two-weight neural networks in image segmentation. Comp Eng Appl 48:163–166
Qiang YJ, Hua L, Chen L, Gu JP, Shen Y (2015) Research on the intelligent recognition of falling of aged people based on multi-weights neural network. Sci Technol Eng 15:119–124
Xiao F, Gan Q, Huang X (2020) Research on fixed-time synchronization of delayed complex dynamical networks with multi-weights. J Sys Sci & Math Scis 40(1):15–28
Xu Y, Li Y, Li W (2020) Adaptive finite-time synchronization control for fractional-order complex-valued dynamical networks with multiple weights. Commun Nonlin Sci Numer Simulat 85:105239
Wang JL, Qin Z, Wu HN, Huang T (2020) Finite-time synchronization and \({\cal{H} _\infty }\) synchronization of multiweighted complex networks with adaptive state couplings. IEEE Trans Cybern 50(2):600–612
Xu Y, Wu X, Mao B, Lü J, Xie C (2021) Finite-time intra-layer and inter-layer quasi-synchronization of two-layer multi-weighted networks. IEEE Trans. Circ Syst. I: Regular Papers 4(68):1589–1598
Yang X, Lu J (2016) Finite-time synchronization of coupled networks with markovian topology and impulsive effects. IEEE Trans Autom Contr 61(8):2256–2261
Yang X, Lam J, Ho DWC, Feng Z (2017) Fixed-time synchronization of complex networks with impulsive effects via nonchattering control. IEEE Trans Autom Contr 62(11):5511–5521
Zhang W, Yang X, Li C (2019) Fixed-time stochastic synchronization of complex networks via continuous control. IEEE Trans Cybern 49(8):3099–3104
Xu Y, Wu X, Li N, Liu L, Xie C, Li C (2020) Fixed-time synchronization of complex networks with a simpler nonchattering controller. IEEE Trans Circ Syst II Exp Briefs 67(4):700–704
Jiang S, Qi Y, Cai S, Lu X (2021) Light fixed-time control for cluster synchronization of complex networks. Neurocomputing 424:63–70
Hu C, Jiang H (2022) Special functions-based fixed-time estimation and stabilization for dynamic systems. IEEE Trans Syst Man Cybern Syst 52(5):3251–3262
Hu C, Yu J, Chen Z, Jiang H, Huang T (2017) Fixed-time stability of dynamical systems and fixed-time synchronization of coupled discontinuous neural networks. Neural Netw 89:74–83
Chen C, Li L, Peng H, Yang Y, Mi L, Zhao H (2020) A new fixed-time stability theorem and its application to the fixed-time synchronization of neural networks. Neural Netw 123:412–419
Abdurahman A, Jiang H, Hu C (2021) Improved fixed-time stability results and application to synchronization of discontinuous neural networks with state-dependent switching. Int J Robust Nonlin Contr 31:5725–5744
Hu C, He H, Jiang H (2021) Fixed/preassigned-time synchronization of complex networks via improving fixed-time stability. IEEE Trans Cybern 51(6):2882–2892
Zhang W, Li C, Li H, Yang X (2020) Cluster stochastic synchronization of complex dynamical networks via fixed-time control scheme. Neural Netw 124:12–19
Peng H, Wei N, Li L, Xie W, Yang Y (2010) Models and synchronization of time-delayed complex dynamical networks with multi-links based on adaptive control. Phys Lett A 374:2335–2339
Zheng M, Li L, Peng H, Xiao J, Yang Y, Zhang Y, Zhao H (2019) General decay synchronization of complex multi-links time-varying dynamic network. Commun Nonlin Sci Numer Simulat 67:108–23
Xu Y, Gao S, Li W (2021) Exponential stability of fractional-order complex multi-links networks with aperiodically intermittent control. IEEE Trans Neural Netw Learn Syst 32:4063–4074
Danca MF (2004) Controlling chaos in discontinuous dynamical systems. Chaos, solitons Fract 22:605–612
Lei X, Cai S, Jiang S, Liu Z (2017) Adaptive outer synchronization between two complex delayed dynamical networks via aperiodically intermittent pinning control. Neurocomputing 222:26–35
Funding
This work was supported by National Science Foundation of China (Grant Nos. 12102147 and 62173163), and China Postdoctoral Science Foundation (Grant No. 2020M681494)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Shi, J., Zhou, P., Cai, S. et al. On finite-/fixed-time synchronization of multi-weighted dynamical networks: a new unified control approach. Neural Comput & Applic 35, 5769–5790 (2023). https://doi.org/10.1007/s00521-022-07979-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-022-07979-8