
Abstract
In this paper, a class of shunting inhibitory cellular neural networks model with multi-proportional delays is proposed. Based on the contraction mapping fixed point theorem and differential inequality techniques, some sufficient conditions are obtained for the existence and global exponential stability of pseudo almost periodic solutions for this class of neural networks. In addition, an example and its numerical simulations are given to illustrate our results.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
As we known, time delays inevitably exist in biological and artificial neural networks because of the finite switching speed of neurons and amplifiers [1], which can also affect the stability of neural network systems and may lead to some complex dynamic behaviors such as oscillation, chaos and instability. In reality, time delays involving in neural networks may be proportional in theory, that is to say, the proportional delay function \(\tau (t)=t- qt\) is a monotonically increasing function with the increase of time \(t > 0\), where q is a constant and satisfies \(0< q < 1\). In particular, the proportional delay is one of the many objective-existent delay types such as the proportional delay usually is required in web quality of service routing decision, which is because it is convenient to control the networks running time according to the network allowed delays [2,3,4,5,6,7]. Moreover, the systems with proportional delays have many interesting applications, for example, collection of current by the pantograph of an electric locomotive [8], electrodynamics [9], nonlinear dynamics [10, 11], and probability theory on algebraic structures [12].
On other hand, in the aspect of studying the almost periodic problems for dynamic systems and its related topics, the existence of almost periodic, asymptotically almost periodic, pseudo-almost periodic solutions become the most attractive hot issues in qualitative theory of differential equations due to their applications, especially in biology, economics and physics (see [13,14,15]). In particular, people have paid much attention to the study of existence and stability of almost periodic solutions and pseudo almost periodic solutions for shunting inhibitory cellular neural networks (SICNNs) with time-varying delays and distributed delays because of its successful applications in variety of areas such as signal processing, pattern recognition, chemical processes, nuclear reactors, biological systems, static image processing, associative memories, optimization problems and so on (see [16,17,18,19,20,21,22,23,24,25,26,27,28] and the references cited therein). However, to the best of our knowledge, there is no result on the existence of pseudo almost periodic solutions for SICNNs with proportional delays.
Motivated by the above discussions, the main purpose of this paper is to establish some sufficient conditions on the existence and exponential stability of pseudo almost periodic solutions for the following SICNNs with multi-proportional delays:
for \(t\ge t_{0}\) and \(ij \in J:=\{11, \ldots , 1n, 21, \ldots , 2n, \ldots , m1, \ldots , mn \}\), where \(C_{ij}\) denotes the cell at the (i, j) position of the lattice, the r-neighborhood \(N_{r}(i,j)\) of \(C_{ij}\) is
\(x_{ij}\) is the activity of the cell \(C_{ij}, L_{ij}(t)\) is the external input to \(C_{ij}, a_{ij}(t)\) represents the passive decay rate of the cell activity, \(C_{ij}^{kl}(t)\) is the connection or coupling strength of postsynaptic activity of the cell transmitted to the cell \(C_{ij}\), and the activity function \(f(x_{kl})\) is a continuous function representing the output or firing rate of the cell \(C_{kl}, q _{ij}, i j \in J, \) are proportional delay factors and satisfy \(0 < q _{ij} \le 1\), and \(q _{ij} t=t -(1-q _{ij})t\), in which \(\tau _{ij}(t)=(1-q _{ij})t\) is the transmission delay function, and \((1-q _{ij})t \rightarrow \infty \) as \(q_{ ij}\ne 1, t \rightarrow \infty , \varphi _{ij }(s)\) denotes the initial value of \(x _{ij}(s) \) at \(s \in [q_{ij}t_{0}, \ t_{0}] ,\) and \( {\varphi }_{ij }\in C([q_{ij}t_{0}, \ t_{0}], \mathbb {R}) \). It can be shown by the method-of-steps given in Hale and Verduyn Lunel [29] that the solution of (1.1) exists and is unique.
The remaining of this paper is organized as follows. In Sect. 2, we give some basic definitions and lemmas, which play an important role in Sect. 3 to establish the existence of pseudo almost periodic of (1.1). Here we also study the global exponential stability of pseudo almost periodic solutions. The paper concludes with an example to illustrate the effectiveness of the obtained results by numerical simulation.
2 Preliminaries
In this section, we shall first recall some basic definitions, lemmas which are used in what follows.
Let l be a positive integer, we denote by \(\mathbb {R}^{l}\) \(\left( \mathbb {R}=\mathbb {R}^{1}\right) \) the set of all \(l-\)dimensional real vectors (real numbers). For any \( \{x_{ij} \}=(x_{11} , \ x_{12} , \ldots , x_{m n} ) \in \mathbb {R}^{ mn}\), we let |x| denote the absolute-value vector given by \(|x|=\{|x_{ij }|\} \), and define \(\Vert x \Vert =\max \nolimits _{ ij\in J} |x_{ij } | \). A matrix or vector \(A\ge 0\) means that all entries of A are greater than or equal to zero. \(A>0\) can be defined similarly. For matrices or vectors \(A_{1}\) and \(A_{2}, A_{1}\ge A_{2}\) (resp. \(A_{1}> A_{2}\)) means that \(A_{1}- A_{2}\ge 0\) (resp. \(A_{1}- A_{2}>0\)). \(BC\left( \mathbb {R},\mathbb {R}^{l}\right) \) denotes the set of bounded and continuous functions from \(\mathbb {R}\) to \(\mathbb {R}^{l}\), and \(BUC\left( \mathbb {R},\mathbb {R}^{l}\right) \) denotes the set of bounded and uniformly continuous functions from \(\mathbb {R}\) to \(\mathbb {R}^{l}\). Note that \(\left( BC\left( \mathbb {R},\mathbb {R}^{l}\right) , \Vert \cdot \Vert _{\infty }\right) \) is a Banach space, where \(\Vert \cdot \Vert _{\infty }\) denotes the supremum norm \(\Vert \varphi \Vert _{\infty } := \sup \nolimits _{ t\in \mathbb {R}} \Vert \varphi (t)\Vert \). For \(h\in BC(\mathbb {R},\mathbb {R} )\), let \(h^+\) and \(h^-\) be defined as
We denote by \(AP\left( \mathbb {R},\mathbb {R}^{l}\right) \) the set of the almost periodic functions from \(\mathbb {R}\) to \(\mathbb {R}^{l}\). Besides, define the class of functions \(PAP_{0}\left( \mathbb {R},\mathbb {R}^{l}\right) \) as follows:
A function \(u\in {BC\left( \mathbb {R},\mathbb {R}^{l}\right) }\) is called pseudo almost periodic if it can be expressed as
where \(h\in {AP\left( \mathbb {R},\mathbb {R}^{l}\right) }\) and \(\varphi \in {PAP_{0}\left( \mathbb {R},\mathbb {R}^{l}\right) }.\) The collection of such functions will be denoted by \(PAP\left( \mathbb {R},\mathbb {R}^{l}\right) .\) Then, \(\left( PAP\left( \mathbb {R},\mathbb {R}^{l}\right) ,\Vert .\Vert _{\infty }\right) \) is a Banach space and \(AP\left( \mathbb {R},\mathbb {R}^{l}\right) \) is a proper subspace of \(PAP(\mathbb {R},\mathbb {R}^{n})\) [13, 14].
For \(ij\in J,\) it will be assumed that \(c_{i} :\mathbb {R}\rightarrow \mathbb {R}\) is an almost periodic function, \( \eta _{i }: \mathbb {R}\rightarrow [0, \ +\infty ), I_{i}, \ a_{ij}, \ b_{ij} :\mathbb {R}\rightarrow \mathbb {R}\) are pseudo almost periodic functions.
We also make the following assumptions which will be used later.
-
\((\mathbf {H_{0}})\) for \(ij \in J, M[a_{ij}]=\lim \nolimits _{T\rightarrow +\infty }\frac{1}{T}\int _{t}^{t+T}a_{ij}(s)ds>0, \) and there exist a bounded continuous function \(\tilde{a}_{ij} :\mathbb {R}\rightarrow (0, \ +\infty )\) and a positive constant \(K_{ij} \) such that
$$\begin{aligned}e ^{ -\int _{s}^{t}a_{ij}(u)du}\le K_{ij} e ^{ -\int _{s}^{t}\tilde{a} _{ij}(u)du}, \quad \ \text{ for } \text{ all } t,s\in \mathbb {R} \text{ and } t-s\ge 0.\end{aligned}$$ -
\((\mathbf {H_{1}})\) there exist constants \(M _{f} \) and \(L ^ {f} \) such that
$$\begin{aligned} |f(u )-f(v )|\le L ^{f} |u -v |, \ |f(u ) |\le M_{f}, \quad { \ \text {for all}} \ u , v \in \mathbb {R}. \end{aligned}$$ -
\((\mathbf {H_{2}})\) there exist positive constants L and \(\kappa \) such that
$$\begin{aligned}\{L\}\ge \left\{ \sup \limits _{t\in \mathbb {R}}\int _{-\infty }^{t}e^{-\int _{s}^{t}a_{ij}(u)du}| L_{ij}(s)| ds\right\} , \end{aligned}$$$$\begin{aligned}\sup \limits _{t\in \mathbb {R}}\left\{ -\frac{\kappa }{\kappa +L}\tilde{a}_{ij}(t)+K_{ij} \sum \limits _{C_{kl}\in N_{r}(i,j)}|C_{ij}^{kl} (t)|( L^{f}(\kappa +L)+|f(0)|)\right\} <0, \end{aligned}$$
and
Lemma 2.1
(see [5, Lemma 2.1]) Let \(\varphi (t)\in PAP(\mathbb {R},\mathbb {R} ) \), and \(\beta \in \mathbb {R}\) be a constant. Then, \(\varphi (\beta t)\in PAP(\mathbb {R},\mathbb {R} )\).
3 Main Results
In this section, we establish sufficient conditions on the existence and exponential stability of pseudo almost periodic solutions of (1.1).
Theorem 3.1
Let \((H_{0}), (H_{1})\) and \((H_{2})\) hold. Then, there exists a unique continuously differentiable pseudo almost periodic solution of system (1.1).
Proof
Let \( \varphi \in PAP(\mathbb {R},\mathbb {R}^{mn})\), it follows from Lemma 2.1 that
In view of \((H_{1})\) and Corollary 5.4 in [14, p. 58], we have
Then, notice that \( M[a_{ij}(t) ]>0, \ ij\in J \), in view of (3.1), it follows from Theorem 2.3 in [30] that the nonlinear pseudo almost periodic differential equations,
has exactly one pseudo almost periodic solution:
Let \(\varphi ^{0}(t)=x ^{0}(t)\). Then,
Set
It follows that \(\mathbf {B}\) is a bounded closed subset of \(PAP(\mathbb {R},\mathbb {R}^{mn})\). If \(\varphi \in \mathbf {B} \) , then
Now, we define a mapping \(T:\mathbf {B} \rightarrow PAP(\mathbb {R},\mathbb {R}^{mn})\) by setting
We next prove that the mapping T is a contraction mapping of the \(\mathbf {B} \).
First we show that for any \(\varphi \in \mathbf {B} , \ T(\varphi ) =x^{\varphi } \in \mathbf {B} \).
Note that
i.e., \( T(\varphi ) =x^{\varphi } \in \mathbf {B} \).
Second, we show that T is a contract operator.
In fact, in view of (3.3), (3.4), \((H_{0}), (H_{1})\) and \((H_{2})\), for \( \varphi , \psi \in \mathbf {B} \), we have
which yields
which implies that the mapping \(T :\mathbf {B} \longrightarrow \mathbf {B} \) is a contraction mapping. Therefore, the mapping T possesses a unique fixed point
By (3.2) and (3.3), \(x^{* } \) satisfies (3.2). So (1.1) has at least one pseudo almost periodic solution \(x^{* } \) . The proof of Theorem 3.1 is now completed.
Theorem 3.2
Let \((H_{0})\) and \((H_{1})\) hold. Moreover, assume that there exist positive constants \(\lambda _{0}, \ L \) and \(\kappa \) such that \((H_{2})\) holds, and
Then system (1.1) has at least one pseudo almost periodic solution \(x^{*}(t)\). Moreover, \(x^{*}(t)\) is globally exponentially stable, i.e., for arbitrary solution x(t) of (1.1), there exist two positive constants \(\lambda \) and \(\bar{M}\) such that
Proof
Obviously, by Theorem 3.1, (1.1) has a pseudo almost periodic solution \(x^{*}(t)=\left\{ x^{*}_{ij}(t)\right\} \). Suppose that \( x(t)=\{x_{ij}(t)\} \) is an arbitrary solution of (1.1) associated with initial value \( \varphi (t)=\{\varphi _{ij}(t)\} \) satisfying the second equation of (1.1).
Let \( y (t) = \{y_{ij}(t)\} = \{ x_{ij}(t) -x_{ij}^{*}(t) \}.\) Then
From (3.5), we can choose a constant \(\lambda \in (0, \ \min \{ \lambda _{0}, \ \min \nolimits _{ij\in J}\inf \nolimits _{t\ge t_{0}}\tilde{a}_{ij} (t)\}) \) such that
Let
For any \(\varepsilon >0\), we obtain
and
where \(M=\max \nolimits _{ij \in J }K_{ij}+1\).
In the following, we will show
Otherwise, there must exist \(ij \in J\) and \(\theta >t_{0} \) such that
and
Note that
With the help of (3.7), (3.8) and (3.11), we have
which contradicts (3.10). Hence, (3.9) holds. Letting \(\varepsilon \longrightarrow 0^{+}\), we have from (3.9) that
and
where \(\bar{M}=Me^{ \lambda t_{0} }\). This completes the proof.
4 An Example
Example 4.1
Consider the following non-autonomous SICNNs with multi-proportional delays:
where \(t\ge 1, \ f (x) =\frac{1}{50} (|x+1|-|x-1|) , x_{ij}(s)=\varphi _{ij}(s), s\in \left[ \frac{1}{2}, \ 1\right] , \) and \( {\varphi }_{ij }\in C\left( \left[ \frac{1}{2}, \ 1\right] ,\mathbb {R}\right) \ i, j=1,2,3.\) Let
Obviously,

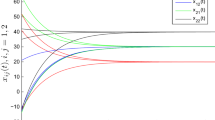
Numerical solutions to system (4.1) with three groups of different initial values
where \( ij \in J=\{11,12,13,21,22,23,31,32,33\}.\) Let \(L=5, \lambda _{0}=2, \kappa =1, q_{ij}=\frac{1}{2}, \ L^{f}_{i}=L^{g}_{i} =\frac{1}{18},\ K_{i}=e^{3}, \tilde{a}_{ij} =1, i,j=1,2,\) one can easily check that system (4.1) satisfies \((H_{0}), (H_{1}), (H_{2})\) and (3.5). By the consequence of Theorem 3.2, it follows that system (4.1) has exactly one pseudo almost periodic solution \(x^{*}(t)\). Moreover, all solutions of solutions for (4.1) converge exponentially to \(x^{*}(t)\) . The exponential convergent rate is about 0.001. The fact is verified by the numerical simulation in Fig. 1 and there are three different initial values which are \(\varphi _{11}\equiv 2.1, \varphi _{12}\equiv -2.3\),\(\varphi _{13}\equiv 2.4, \varphi _{21}\equiv 2.2, \varphi _{22}\equiv 2.5, \varphi _{23}\equiv 2.3, \varphi _{31}\equiv -2.1, \varphi _{32}\equiv -2.2, \varphi _{33}\equiv -2.5\); \(\varphi _{11}\equiv 2.2, \varphi _{12}\equiv -2.1\),\(\varphi _{13}\equiv 2.5, \varphi _{21}\equiv 2.4, \varphi _{22}\equiv 2.2, \varphi _{23}\equiv 2.1, \varphi _{31}\equiv -2.3, \varphi _{32}\equiv -2.4, \varphi _{33}\equiv -2.3\) and \(\varphi _{11}\equiv -2.2, \varphi _{12}\equiv 2.1\),\(\varphi _{13}\equiv -2.5, \varphi _{21}\equiv -2.4, \varphi _{22}\equiv -2.2, \varphi _{23}\equiv -2.1, \varphi _{31}\equiv 2.3, \varphi _{32}\equiv 2.4, \varphi _{33}\equiv -2.3,\) respectively.
Remark 4.1
To the best of our knowledge, there is no research on the globally exponential convergence of the pseudo almost periodic solution of SICNNs with multi-proportional delays. We also mention that all results in the reference [16,17,18,19,20,21,22,23,24,25,26,27,28] cannot be applied to imply that all solutions for (4.1) converge exponentially to \(x^{*}(t)\). In particular, we employ a novel proof to establish some criteria to guarantee the existence and exponential stability of pseudo almost periodic solutions for SICNNs with multi-proportional delays. We expect to extend this work to other neural networks models with multi-proportional delays.
References
Wu J (2001) Introduction to neural dynamics and signal trasmission delay. Walter de Gruyter, Berlin
Liu B (2017) Finite-time stability of CNNs with neutral proportional delays and time-varying leakage delays. Math Methods Appl Sci 40:167–174
Liu B (2016) Global exponential convergence of non-autonomous SICNNs with multi-proportional delays. Neural Comput Appl 191:1–5
Liu B (2017) Finite-time stability of a class of CNNs with heterogeneous proportional delays and oscillating leakage coefficients. Neural Process Lett 45:109–119
Yu Y (2017) Exponential stability of pseudo almost periodic solutions for cellular neural networks with multi-proportional delays. Neural Process Lett 45:141–151
Zhang A (2017) Almost periodic solutions for SICNNs with neutral type proportional delays and D operators. Neural Process Lett. doi:10.1007/s11063-017-9631-5
Huang Z (2017) Almost periodic solutions for fuzzy cellular neural networks with multi-proportional delays. Int J Mach Learn Cybern 8:1323–1331
Ockendon JR, Tayler AB (1971) The dynamics of a current collection system for an electric locomotive. Proc R Soc A 322:447–468
Fox L, Mayers DF, Ockendon JR, Tayler AB (1971) On a functional-differential equation. J Inst Math Appl 8(3):271–307
Yu Y (2017) Finite-time stability on a class of non-autonomous SICNNs with multi-proportional delays. Asian J Control 19(1):1–8
Song X, Zhao P, Xing Z, Peng J (2016) Global asymptotic stability of CNNs with impulses and multi-proportional delays. Math Methods Appl Sci 39(4):722–733
Derfel GA (1990) Kato problem for functional-differential equations and difference Schr\(\ddot{o}\)dinger operators. Oper Theory 46:319–321
Fink AM (1974) Almost periodic differential equations, Lecture Notes in Mathematics, vol 377. Springer, Berlin
Zhang C (2003) Almost periodic type functions and ergodicity. Kluwer Academic/Science Press, Beijing
Xiong W (2016) New results on positive pseudo-almost periodic solutions for a delayed Nicholsons blowflies model. Nonlinear Dyn 85(1):1–9
Zhou Q (2017) Weighted pseudo anti-periodic solutions for cellular neural networks with mixed delays. Asian J Control. doi:10.1002/asjc.1468
Cai M, Zhang H, Yuan Z (2008) Positive almost periodic solutions for shunting inhibitory cellular neural networks with time-varying delays. Math Comput Simul 78(4):548–558
Shao J (2008) Anti-periodic solutions for shunting inhibitory cellular neural networks with time-varying delays. Phys Lett A 372(30):5011–5016
Liu X (2015) Exponential convergence of SICNNs with delays and oscillating coefficients in leakage terms. Neurocomputing 168:500–504
Long Z (2016) New results on anti-periodic solutions for SICNNs with oscillating coefficients in leakage terms. Neurocomputing 171:503–509
Xu Y (2017) Stability analysis of anti-periodic neutral type SICNNs with D operator. Neural Process Lett. doi:10.1007/s11063-017-9696-1
Liu B, Shao J (2013) Almost periodic solutions for SICNNs with time-varying delays in the leakage terms. J Inequal Appl 494:1–22
Xu Y (2017) Exponential stability of weighted pseudo almost periodic solutions for HCNNs with mixed delays. Neural Process Lett. doi:10.1007/s11063-017-9595-5
Xu Y (2017) Exponential stability of pseudo almost periodic solutions for neutral type cellular neural networks with D operator. Neural Process Lett 46:329–342
Liu B (2017) Asymptotic behavior of solutions to a class of non-autonomous delay differential equations. J Math Anal Appl 446:580–590
Chérif F (2012) Existence and global exponential stability of pseudo almost periodic solution for SICNNs with mixed delays. J Appl Math Comput 39:235–251
Zhou Q (2016) Pseudo almost periodic solutions for SICNNs with leakage delays and complex deviating arguments. Neural Process Lett 44:375–386
Wang W, Liu B (2014) Global exponential stability of pseudo almost periodic solutions for SICNNs with time-varying leakage delays. Abstr Appl Anal 2014(967328):1–18
Hale JK, Verduyn Lunel SM (1993) Introduction to functional differential equations. Springer, New York
Zhang C (1995) Pseudo almost periodic solutions of some differential equations II. J Math Anal Appl 192:543–561
Acknowledgements
The author gratefully acknowledges the Associate Editor, the anonymous referees for their constructive comments and patient work.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declare no conflict of interest.
Rights and permissions
About this article

Cite this article
Tang, Y. Pseudo Almost Periodic Shunting Inhibitory Cellular Neural Networks with Multi-proportional Delays. Neural Process Lett 48, 167–177 (2018). https://doi.org/10.1007/s11063-017-9708-1
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-017-9708-1
Keywords
- Shunting inhibitory cellular neural networks
- Pseudo almost periodic solution
- Existence
- Exponential stability
- Multi-proportional delay