
Abstract
Polymers exhibit viscoelastic behavior: their mechanical response depends on the loading time, or on the loading frequency. In addition, if a polymer structure has a long service life, the mechanical behavior can also depend on physical aging and chemical degradation. This paper describes a thermodynamically consistent constitutive law taking into account the viscoelastic phenomena and the physical aging. First, an original nonlinear viscoelastic law, depending on the physical aging time, is developed. Then, considering experimental values of dynamic modulus from the literature, the model parameters are identified, using a new method based on the discrete form of the spectrum of relaxation time. The obtained model is numerically implemented and compared to experimental results.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
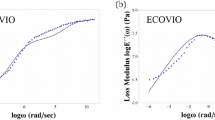
Polymers exhibit viscoelastic behavior: their mechanical response depends on the loading time, or on the loading frequency (Findley et al. 1976). In the time domain, the relaxation experiment allows the characterization of the viscoelastic behavior (Knauss et al. 2006), in the form of relaxation modulus \(E(t)\), with \(t\) being the loading time. In the frequency domain, the Dynamical Mechanical Analysis (DMA) experiment permits one to identify the viscoelastic behavior (Knauss et al. 2006), in the form of the complex modulus \(E^{*}(\omega )\), with \(\omega \) being the angular frequency. The complex modulus is composed of a real part, the storage modulus \(E'(\omega )\), and an imaginary part, the loss modulus \(E''(\omega )\). The experimental procedure, for both DMA and relaxation experiments, is well described in the literature (Brinson 2008; Jalocha et al. 2015b; Ozupek 1989). Classic evolutions of the relaxation modulus and the complex modulus, taken from (Jalocha et al. 2015c), are respectively presented in Fig. 1(a) and Fig. 1(b). It is recalled in Eq. (1) that the dynamic modulus of a material in the frequency domain is equal to the Fourier transform of the relaxation modulus in the time domain, and vice versa (Markovitz and Hershel 1977),

Schematic evolution of (a) relaxation modulus and (b) complex modulus, (Jalocha et al. 2015c)
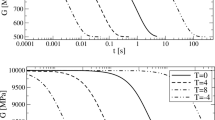
When a polymer structure has a long service life, another physical phenomenon appears: physical aging. Depending on the considered material and the application, the physical aging can affect the viscoelastic part of the material behavior. As an example, the effect of physical aging on the storage modulus of an amorphous polymer is presented in Fig. 2, for a strain amplitude of \(0.1\%\) and for different elapsed times at \(150^{o}C\) (Haidar and Vidal 1996).

Example of physical aging effect on the storage modulus for different elapsed time at \(150^{o}C\) (Haidar and Vidal 1996)
Accurate modeling of the viscoelastic behavior of polymer materials makes it possible to guarantee their performance for the entire service life, their modeling at different scales has been an important feature in recent studies; see for example (Huber and Tsakmakis 2000; Christensen 1980; Swanson and Christensent 1983). In the literature, two approaches are used to model the polymer behavior: a microscopic approach and a macroscopic one. Different models describe the polymer behavior based on homogenization theory (Xu et al. 2008; Lopez-Pamies 2010; Goudarzi and Lopez-Pamies 2013; Avazmohammadi and Castaneda 2012; Lopez Jimenez 2014; Kaminski 2015), or on macroscopic observations for the elastic part (Arruda and Boyce 1993; Diani et al. 2006; Lion 1997; Ogden and Roxburgh 1999; Ghoreishy et al. 2014) and for the viscous part (Lion et al. 2009; Govindjee and Mihalic 1998; LeTallec et al. 1993; Wollscheid and Lion 2013; Wollscheid 2014; Zhang et al. 2011; Ozupek and Becker 1992; Simo 1987; Steinmann et al. 2012).
Different constitutive laws take into account the physical aging. They describe this effect on hyperelastic behavior (Guo et al. 2020), or viscoelastic behavior (McKenna 1994; Brinson 1995; Drozdov and Dorfmann 2003). In the last case, the constitutive behavior are based on the integral form of the viscoelastic law. This study proposes an original nonlinear viscoelastic law based on internal variables, thermodynamically consistent and easy to identify, to model the viscoelastic properties and the nonlinear physical aging effect.
Motivated by a variety of work (Williams et al. 1955; Zheng et al. 2003; Cerrada and McKenna 2000; Bradshaw and Brinson 1997), the dimensionless physical aging variable \(\nu \) is defined by
where \(t_{e}\) is the physical aging time, \(t_{a}\) is a time constant equal to \(1 \sec \), \(a_{T}\) is the shift factor and takes into account the time temperature effect (Brinson 2008; Williams et al. 1955).
The next section develops a nonlinear constitutive viscoelastic model, including physical aging dependent model parameters. Then another section presents a simple method to identify these model parameters, from literature experimental results presented in Fig. 2. To develop the complete expression of the complex modulus, a constant loss factor of 5% is used, as an example. To finish, the last section will discuss the numerical implementation and the model verification.
2 Nonlinear viscoelastic constitutive model
Considering a viscoelastic body occupying a domain \(\Omega \), the initial position vector of a material point inside this domain is denoted by \(\underline{X}\) and the current coordinates by \(\underline{x}\). The constitutive model is constructed under the small strain assumption, but can be extended to finite deformation viscoelasticity. According to this hypothesis, the small strain tensor is computed as \(\boldsymbol{\varepsilon } = \frac{1}{2} ({\mathbf{Grad}}(\underline{u}) + { \mathbf{Grad}}^{T}(\underline{u}) )\) with \(\underline{u} = \underline{x}- \underline{X}\).
The model obeys the thermodynamic framework, initially proposed in (Halphen and Nguyen 1975; Holzapfel 2006). It means the law respects the first and second principles of thermodynamic, constructed in terms of free energy \(\psi \) and dissipation potential \(\phi \).
In this work, a decoupled representation of the free energy \(\psi \) is considered. It includes an elastic part \(\psi ^{\infty }\) and a viscoelastic part \(\psi ^{i}\), defined as:
where \(\boldsymbol{\alpha ^{i}}\) denote a series of internal variables.
According to (Coleman and Gurtin 1967), the stress tensor \(\boldsymbol{\sigma }\) is given by the following relation:
In order to ensure an isothermal process, the Clausius–Duhem inequality, expressed as
is satisfied if
with \(\phi ^{i}\) representing the dissipation potentials. A detailed discussion on this point for the case of viscoelasticity is explained in (LeTallec and Rahier 1994).
Concerning the elastic part of the free energy, a quadratic expression is assumed, as for example in (Simo 1987):
The same choice is made for the viscoelastic part, i.e.:
In both cases, \(0 \leq E^{\infty }\) and \(0 \leq E^{i}\).
Concerning the dissipation potentials, the internal variables \(\boldsymbol{\alpha ^{i}}\) represent viscous strains and are associated with fictitious stresses \(\boldsymbol{q^{i}}\), for each \(i\). Following the reasoning in (Holzapfel 2006) and by analogy with Eq. (4)
Therefore, substitution into Eq. (6) leads to
A quadratic expression is also assumed for the dissipation potentials
where \(\eta _{i}\) can be assimilated to viscosity parameter. The only restriction is that this \(\eta _{i}\) parameter must be a positive real number. But it can evolve during a mechanical process, as in (Amin et al. 2006; Jalocha et al. 2015a). The novelty proposed in this paper lies in the dependency of \(\eta _{i}\) on the physical aging variable: \(\eta _{i} = \eta _{i}(\nu )\).
The combination of Eq. (4) and Eq. (6) leads to
Substituting into Eq. (5) and considering Eq. (10) and Eq. (9) leads to
Finally, considering \(\boldsymbol{q^{\infty }} = E^{\infty }\boldsymbol{\varepsilon }\), the equations of the constitutive model are obtained by substituting the definition of the fictitious stress \(\boldsymbol{q^{i}}\), given in Eq. (8), into Eq. (11) and Eq. (12). We have
This constitutive model, thermodynamically coherent, is conventionally called the generalized Maxwell model, being described by a finite Prony series with \(n\) elements. It is schematically represented by rheological elements using springs and dampers ((Findley et al. 1976; Simo and Hughes 1998)). The novelty proposed in this work lies the fact that the damper parameters \(\eta _{i}(\nu )\) now depend on the physical aging variable. It is thermodynamically and mathematically better to have viscosity parameters dependent on the physical aging variable. Indeed, if moduli depend on the physical aging variable, special care must be taken to the derivation in Eq. (4) and Eq. (7), in the case where the physical aging variable is a function of the strain. Conversely, the viscosity parameters only appear in Eq. (10) and Eq. (12).
3 Parameter identification method
3.1 Proposed method
This section presents an easy to use method to identify the physical aging parameters \((\tau _{i},\eta _{i}(\nu ))\). According to (Findley et al. 1976; Jalocha et al. 2015a), the model parameters \((\tau _{i},\eta _{i})\) are the discrete form of the so called continuous spectrum of relaxation time \(H(\tau )\). This spectrum can be nonlinear and dependent on other parameters, such as prestrain in (Jalocha et al. 2015a), dynamic strain amplitude for the Payne effect (Jalocha 2020), or, in that case, physical aging variable. In the time domain, the spectrum can be related to the relaxation modulus \(E(t)\) (depending on the time \(t\)) by
where \(E_{\infty }\) is the long time modulus. In the frequency domain, the spectrum is related to the dynamic modulus \(E^{*}(\omega )\) by
It is not possible to directly identify the spectrum, from mechanical tests. But many studies propose a procedure to identify it from the moduli. In one hand, the work of Smith proposes to identify the spectrum from the dynamic modulus (Smith 1971). This procedure presents some singularities and is not easy to implement. In the other hand, the work of Baumgaertel (Baumgaertel and Winter 1992), more recently discussed in (Jalocha et al. 2015a), proposes to identify the spectrum from the relaxation modulus. This procedure, which will be used here, has the advantage to be easy to implement (direct identification of the parameters) and to exhibit low sensitivity to singularities. If experimental results are obtained in the time domain (i.e. relaxation modulus), the identification procedure can directly start. However, if experimental results are obtained in the frequency domain (i.e. dynamic modulus), they need to be converted into the time domain, using an analytical inverse Fourier transform or using the empirical relations proposed in (Park and Schapery 1999) or, as used in this study, in (Schwarzl 1969):
The proposed method is explained here. Focusing on Eq. (14), and applying the change of variable \(\displaystyle f(z)=\frac{H(\frac{1}{z}) }{z}\), it becomes
One can remark the right member of Eq. (17) defines a Laplace transform:
So, the analytical expression of the continuous spectrum can be obtained by fitting the relaxation modulus by an usual function, taking its inverse Laplace transform (Eq. (18)) and inversing the change of variable (Eq. (17)). See (Smith 1971) and (Widder 1946) for a complete explanation of the operations performed.
The usual function retained here to fit the relaxation modulus is
where \(E_{g}\), \(t_{0}\) and \(\beta \) are adjustable parameters. It leads to the following expression of the continuous spectrum:
with \(\Gamma (\beta )\) the Gamma function of \(\beta \).
The last step of the proposed method to identify the model parameters is to convert the obtained continuous spectrum Eq. (20) into a discrete form. The retained procedure, discussed in (Jalocha et al. 2015c), starts by imposing a set of relaxation time \((\tau _{i})_{i}\), equally placed on the logarithmic scale, see (Baumgaertel and Winter 1992), with \(1 \leq i \leq n\). By identifying the continuous spectrum with the discrete one leads to the following expression of the viscosity parameters:
Complete details of the computation can be accessed in (Baumgaertel and Winter 1992; Knauss et al. 2006; Jalocha et al. 2015c). If the continuous spectrum of relaxation time exhibits a dependency on the physical aging variable \(H(\tau ,\nu )\), the viscosity parameters also depend on the physical aging variable. The purely elastic part of the constitutive model (Eq. (13)) is given by \(E_{\infty }\) identified previously.
3.2 Application on experimental results
This subsection applies the method of a physical aging dependent model to the experimental complex modulus presented in Fig. 2. The main different steps are:
-
Step 1: Convert data into the time domain.
-
Step 2: Identify the continuous spectrum \(H\), depending on the relaxation time \(\tau \) and the physical aging variable \(\nu \).
-
Step 3: Compute the discrete spectrum, from the continuous one, taking the form \((\tau _{i},\eta _{i}(\nu ))_{i}\).
For the considered data, the shift factor \(a_{T}\) is taken equal to 1, leading to \(\nu = 10; \ 50; \ 100; 300; \ 1300; \ 3300; \ 9400\).
Step 1:
Using the empirical formula taken from (Schwarzl 1969), the complex moduli, functions of the angular frequency, are converted into the time domain. The equivalent relaxation moduli obtained are plotted in Fig. 3.

Data converted into the time domain
Step 2: Each converted curve, depending on the physical aging variable, is fitted by Eq. (19), as shown in Fig. 4(a). The \(E_{g}\) and \(E_{\infty }\) moduli, and the turn-off time \(t_{0}\) seem to be independent on the physical aging variable, they are, respectively, equal to \(4473~\mbox{MPa}\), \(11015~\mbox{MPa}\) and \(5.01 \ 10^{-6}~\mbox{s}\). However, the slope \(\beta \) is physical aging variable dependent. The result of the identification of \(\beta \) as a function of the physical aging variable is plotted in Fig. 4(b).

Experimental results fit by Eq. (19) (a) and \(\beta \) evolution as a function of the physical aging variable (b)
The evolution of \(\beta \) can be modeled by an equation taking the following form:
with \(\beta ^{0}=0.0856\), \(\nu _{0}=41.2\) and \(a=0.161\).
The continuous spectra of relaxation time, obtained by previous fits, are plotted in Fig. 5. The complete evolution of the continuous spectrum, as a function of the relaxation time and of the physical aging variable is provided by the combination of Eq. (20), the fits in Fig. 4(a) and Eq. (22).

Continuous spectra of relaxation time, physical aging variable dependent, according to the fits in Fig. 4
Step 3: In this last step, the previous continuous spectrum of relaxation time \(H(\tau ,\nu )\) is converted into a discrete form. The \(\tau \) axis is discretized by a set of value \((\tau _{i})_{i \leq n}\), with \(n=21\), \(\tau _{1}=10^{-5}\) and \(\tau _{21}=10^{15}\), equally spaced in the logarithm scale. The associated set of physical aging variable dependent viscosity is computed as follows:
4 Numerical implementation and verification
The complete model is numerically implemented into the finite element code ABAQUS/ STANDARD, using an UMAT subroutine, in order to perform temporal dynamical analysis. The material parameters useful for the subroutine are the set of relaxation time \((\tau _{i})\) and the nonlinear spectrum model parameters \(E_{\infty },E_{g},t_{0},\beta ^{0},a,\nu _{0}\). In order to verify the model implementation, DMA tests are performed for different physical aging times. The angular frequency and the strain amplitude are fixed, respectively equal to \(100~\mbox{rad}/\mbox{s}\) and \(0.1\%\).
Numerically, for a given physical aging time value, subroutine computes the corresponding dimensionless value \(\nu \), using Eq. (2). Then \(\beta \) is estimated by Eq. (22). The viscosity parameters \(\eta _{i}\) are updated thanks to Eq. (21) and Eq. (20). During the DMA simulation, for a given strain increment the subroutine computes the corresponding stress increment using Eq. (13).
Figure 6 gives a comparison between the real part of the dynamic modulus experimentally obtained (Fig. 2) and the FEM predictions. Good agreement is observed between both results. It enables one to check the model and its numerical implementation.

Comparison between FEM and experimental results for a DMA tests (\(100~\mbox{rad}/\mbox{s}\), \(0.1\%\)) for several physical aging times
5 Conclusion
This paper deals with an original nonlinear viscoelastic constitutive law, taking into account the physical aging of polymer. The constitutive model is developed, following the standard thermodynamic framework. It leads to a nonlinear viscoelastic model where viscosity parameters depend on the physical aging time. A method is proposed to identify the model parameters, starting from experimental results. This method first compute the continuous spectrum of relaxation time, then converts it into a discrete form. This spectrum depends on the relaxation time but also on the physical aging time. The set of identified parameters is used into the constitutive model. Comparisons between the model, numerically implemented, and the experimental results validate the complete process.
This study focuses on small strain. Future work could implement this approach in finite viscoelasticity, in order to take into account the hyper elastic part of polymer. In addition, in the same way, physical aging due to radiation, hydrometry, or any other physical causes could be represented by this model, introducing a dependence in the expression of \(\nu \).
References
Amin, A., Lion, A., Sekita, S., Okui, Y.: Nonlinear dependence of viscosity in modeling the rate-dependent response of natural and high damping rubbers in compression and shear: experimental identification and numerical verification. Int. J. Plast. 22, 1610–1657 (2006)
Arruda, E., Boyce, M.: A three dimensional model for the large stretch behavior of rubber elastic materials. J. Mech. Phys. Solids 41(2), 389–412 (1993)
Avazmohammadi, R., Castaneda, P.: Tangent second order estimates for the large strain, macroscopic response of particle reinforced elastomers. J. Elast. 112, 139–183 (2012)
Baumgaertel, M., Winter, H.: Interrelation between continuous and discrete relaxation time spectra. J. Non-Newton. Fluid Mech. 44, 15–36 (1992)
Bradshaw, R.D., Brinson, L.C.: Physical aging in polymers and polymer composites: an analysis and method for time-aging time superposition. Polym. Eng. Sci. 37, 31–44 (1997)
Brinson, L.C.: Effects of physical aging on long term creep of polymers and polymer matrix composites. Int. J. Solids Struct. 32, 827–846 (1995)
Brinson, L.C.: Polymer Engineering Science and Viscoelasticity. An Introduction. Springer, Berlin (2008)
Cerrada, M.L., McKenna, G.B.: Physical aging of amorphous PEN: isothermal, isochronal and isostructural results. Macromolecules 33, 3065–3076 (2000)
Christensen, R.: A nonlinear theory of viscoelasticity for application to elastomers. J. Appl. Mech. 47, 762–768 (1980)
Coleman, B., Gurtin, M.: Thermodynamics with internal state variables. J. Chem. Phys. 47, 597–613 (1967)
Diani, J., Brieu, M., Gilormini, P.: Observation and modeling of the anisotropic visco hyperelastic behavior of a rubber like material. Int. J. Solids Struct. 43, 3044–3056 (2006)
Drozdov, A.D., Dorfmann, A.: Physical aging and the viscoelastic response of glassy polymers: comparison of observations in mechanical and dilatometric tests. Math. Comput. Model. 37, 665–681 (2003)
Findley, W., Lai, J., Onaran, K.: Creep and Relaxation of Nonlinear Viscoelastic Materials (1976)
Ghoreishy, M., Firouzbakht, M., Naderi, G.: Parameter determination and experimental verification of bergström boyce hysteresis model for rubber compounds reinforced by carbon black blends. Mater. Des. 53, 457–465 (2014)
Goudarzi, T., Lopez-Pamies, O.: Numerical modeling of the nonlinear elastic response of filled elastomers via composite-sphere assemblages. J. Appl. Mech. 47, 1028–1036 (2013)
Govindjee, S., Mihalic, P.: Viscoelastic constitutive relations for the steady spinning of a cylinder. Report, University of California, Berkeley (1998)
Guo, J., Lic, Z., Longb, J., Xiao, R.: Modeling the effect of physical aging on the stress response of amorphous polymers based on a two-temperature continuum theory. Mech. Mater. 143, 103335 (2020)
Haidar, B., Vidal, A.: Time and temperature dependence of amorphous polymer dynamic properties after a small static deformation. J. Phys. IV 6, C8 (1996)
Halphen, B., Nguyen, Q.: Sur les matériaux standards generalisés. J. Méc. 14, 39–63 (1975)
Holzapfel, G.A.: Nonlinear Solid Mechanics, a Continuum Approach for Engineering. Wiley, New York (2006)
Huber, N., Tsakmakis, C.: Finite deformation viscoelasticity laws. Mech. Mater. 32, 1–18 (2000)
Jalocha, D.: Payne effect: a constitutive model based on a dynamic strain amplitude dependent spectrum of relaxation time. Mech. Mater. 148, 103526 (2020)
Jalocha, D., Constantinescu, A., Neviere, R.: Prestrain dependent viscosity of a highly filled elastomer: experiments and modeling. Mech. Time-Depend. Mater. 19, 78–98 (2015a)
Jalocha, D., Constantinescu, A., Neviere, R.: Prestrained biaxial DMA investigation of viscoelastic nonlinearities in highly filled elastomers. Polym. Test. 42, 37–44 (2015b)
Jalocha, D., Constantinescu, A., Neviere, R.: Revisiting the identification of generalized Maxwell models from experimental results. Int. J. Solids Struct. 64, 169–181 (2015c)
Kaminski, M.: Homogenization with uncertainty in Poisson ratio for polymers with rubber particles. Composites, Part B 69, 267–277 (2015)
Knauss, W., Emri, L., Lu, H.: Handbook of Experimental Solid Mechanics. Springer, Berlin (2006)
LeTallec, P., Rahier, C.: Numerical models of steady rolling for non linear viscoelastic structures in finite deformations. Int. J. Numer. Methods Eng. 37, 1159–1186 (1994)
LeTallec, P., Rahier, C., Kaiss, A.: Three dimensional incompressible viscoelasticity in large strains: formulation and numerical approximation. Comput. Methods Appl. Mech. Eng. 109, 223–258 (1993)
Lion, A.: On the large deformation behavior of reinforced rubber at different temperatures. J. Mech. Phys. Solids 45, 1805–1834 (1997)
Lion, A., Retka, J., Rendek, M.: On the calculation of predeformation dependent dynamic modulus tensors in finite nonlinear viscoelasticity. Mech. Res. Commun. 36, 500–520 (2009)
Lopez Jimenez, F.: Modeling of soft composites under three-dimensional loading. Composites, Part B 59, 173–180 (2014)
Lopez-Pamies, O.: A new i1 based hyperelastic model for rubber elastic materials. C. R., Méc. 338, 3–11 (2010)
Markovitz, A., Hershel, J.: Boltzmann and the beginnings of rheology. Trans. Soc. Rheol. 21(3), 381–398 (1977)
McKenna, G.B.: On the physics required for prediction of long term performance of polymers and their composites. J. Res. Natl. Inst. Stand. Technol. 99, 169–189 (1994)
Ogden, R., Roxburgh, D.: A pseudo elastic model for the Mullins effect in filled rubber. Proc. R. Soc. Lond. 455, 2861–2877 (1999)
Ozupek, S.: Constitutive Modeling of Hight Elongation Solid Propellants. PhD thesis, University of Texas (1989)
Ozupek, S., Becker, E.: Constitutive modeling of high elongation solid propellants. J. Eng. Mater. Technol. 114, 111–115 (1992)
Park, S., Schapery, R.: Methods of interconversion between linear viscoelastic material functions. Part I—a numerical method based on Prony series. Int. J. Solids Struct. 36, 1653–1675 (1999)
Schwarzl, F.: On the interconversion between viscoelastic material functions microsymposia on macromolecules. In: Microsymposium on Macromolecules, Prague, PMM, Macromolecules. Prague, IV, V and VI, Prague, Czechoslovakia, 1969-09-01–1969-09-11 (1969)
Simo, J.: On a fully three dimensional finite strain viscoelastic damage model: formulation and computational aspects. Comput. Methods Appl. Mech. Eng. 60, 153–173 (1987)
Simo, J., Hughes, T.: Computational Inelasticity. Interdisciplinary Applied Mathematics (1998)
Smith, T.: Empirical equations for representing viscoelastic functions and for deriving spectra. J. Polym. Sci. 35, 39–50 (1971)
Steinmann, P., Hossain, M., Possart, G.: Hyperelastic models for rubber like materials: consistent tangent operators and suitability for treloar s data. Arch. Appl. Mech. 82, 1183–1217 (2012)
Swanson, S., Christensent, L.: A constitutive formulation for high elongation propellants. J. Spacecr. 20, 559–566 (1983)
Widder, D.: The Laplace Transform. Princeton University Press, Princeton (1946)
Williams, M., Landel, R., Ferry, J.: The temperature dependence of relaxation mechanisms in amorphous polymers and other glass-forming liquids. J. Am. Chem. Soc. 77, 3701–3707 (1955)
Wollscheid, D.: Predeformation and frequency dependence of filler reinforced rubber under vibration. PhD thesis, Universitat der Bundeswehr Munchen (2014)
Wollscheid, D., Lion, A.: Predeformation- and frequency-dependent material behaviour of filler-reinforced rubber: experiments, constitutive modelling and parameter identification. Int. J. Solids Struct. 50, 1217–1225 (2013)
Xu, F., Aravas, N., Sofronis, P.: Constitutive modeling of solid propellant materials with evolving microstructural damage. J. Mech. Phys. Solids 56, 2050–2073 (2008)
Zhang, X., Andrieux, F., Sun, D.: Pseudo elastic description of polymeric foams at finite deformation with stress softening and residual strain effects. Mater. Des. 32, 877–884 (2011)
Zheng, Y., Priestley, R.D., McKenna, G.B.: Physical Aging of an Epoxy Subsequent to Relative Humidity Jumps Through the Glass Concentration. Wiley-Interscience, New York (2003). https://doi.org/10.1002/20084
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Jalocha, D. A nonlinear viscoelastic constitutive model taking into account of physical aging. Mech Time-Depend Mater 26, 21–31 (2022). https://doi.org/10.1007/s11043-020-09473-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11043-020-09473-x