
Abstract
In this work, we suggest a new set of quaternion discrete radial Krawtchouk moments (QDRKMs) for color image reconstruction and classification. These new discrete moments are represented over a disk by using discrete orthogonal radial Krawtchouk moments. The use of Quaternion discrete moments for color image eliminates the discretization errors produced when the Quaternion continuous moments are used. Furthermore, this approach is suggested for highly accurate calculation of QDRKMs in polar coordinates where the kernel is exactly calculated by over circular color pixels. The translation, scaling, and rotation (TSR) invariances for QDRKMs are proved. Theoretical analysis and numerical experiments investigation were shown in terms of the performance description of TSR invariances, classification and robustness to different noises of the QDRKMs compared with continuous quaternion Legendre–Fourier moments using COIL 100 database.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, and with the fast progress of mathematics, computer science, and technological development of digital cameras, almost of the images are chromatic. Indeed, to transmit or stock more information, the digital color images have more potential than a gray level or binary image. Moreover, the values associated of three colors such as green, blue, and red for each level of the pixel or and as well its hue, brightness, and saturation, can be successful when used in many images processing tasks such as reconstruction, object classification, recognition, registration, and segmentation.
The traditional approach to treatment with digital color images has each level separate while processing, employing a gray level method, and to combining the individual output results. As a consequently, this method misses the inherent correlation between the entities of three colors level. The main problem is therefore to handle three values of each pixel level in entirety.
To solve this problem, recently, algebra quaternion color image analysis to represent digital color images by encoding three levels into the imaginary parts by B. J. Chen et al. [4]. The performance of this quaternion algebra is widely seen when a digital color image is treated as a vector space. Firstly, the quaternion algebra is exploited in digital color image processing for the continuous moments by Chen et al. [3], as well as, [5] using the color image representations by the quaternion type moment functions. Moreover, and to ensure the rotation invariance in the problems of classification; researchers introduced continuous radial moments. Indeed, Xiao [25] came up with the radial moments of Legendre, and extended them in 3D case by El Mallahi et al. [16]. The quaternion pseudo-Zernike moments their RST invariants are defined by Chen et al. [6]. They used these continuous moments in color image recognition. The quaternion radial Fourier moments for digital color image processing are defined by Xiang-Yang et al. [23]. The quaternion polar complex moments of TRS invariants for digital color image representation defined by Wang et al. [22]. Unfortunately, their methods for computing quaternion continuous moments are limited by the discretization error, the high computational cost and the propagation of a numerical error in the computation of continuous polynomials values [7, 8].
These methods result problems of redundancy, and discretization due to finding out errors caused by numerical estimation of integrals in the computation of continuous moments. Indeed, the computation of orthogonal continuous moments requires appropriate transformations of the coordinates of image representation in the interval of definition of the continuous polynomials along with, the calculation of the integral using the finite summations. But, this transformation causes an error of discretization. So as to solve that issue for the gray level images, scientists suggested some methods based on the discrete moments using a discrete polynomials such as the ones of Krawtchouk [2, 9, 11,12,13, 26] Tchebitchef’s [14,15,16, 24], Meixner’s [14], Charlier’s [1, 15], Hahn’s [10, 19,20,21], dual Hahn’s [17, 20], and Racah’s [18] for image processing. The calculation of discrete moments eliminates the need for numerical approximation and satisfies exactly the orthogonality property in discrete space coordinates of the image.
For conserving the color image, no work has been suggested to solve the problem. In this work, and in order to solve this problem of the color image, we opt for an exact method to eliminate the discretization errors and preserve the invariant to the rotation. This method is based on discrete radial moments and classification using multilayer perceptron [1]. We them, we suggest two contributions.
We first introduce a new method for computing an exact, stable and fast computation of higher order QDRKMs in circular coordinates. In this contribution, the use of a discrete form of the Radial Tchebichef polynomials has removed the discretization error granting a height stabilization of the aforementioned method.
Second, we put a new method for extracting translation, scaling and rotation invariants of QDRKMs. The experimental results show highly accurate color image reconstruction of the proposed approach.
These new discrete moments are represented over a disk by using discrete orthogonal radial Krawtchouk moments. The use of discrete moments eliminates the discretization errors produced when continuous moments are used. Furthermore, the method is suggested for highly exact calculation of QDRKMs in polar coordinates where the kernel is thoroughly calculated by over circular color pixels. The translation, scaling, and rotation (TSR) invariances for QDRKMs are demonstrated. Theoretical analysis and numerical experiments investigation were shown in terms of the description performance of TSR invariances, classification, robustness to different noises, and computational times CPU of the QDRKMs compared with continuous quaternion Legendre–Fourier moments using COIL 100 data base.
This work is organized as follows: Section 2 introduces Quaternion Radial Krawtchouk moments (QRKMs). In Sec. 3, the computations of the Quaternion Radial Krawtchouk Moments are calculated. In Sec. 4, a color image reconstruction uses QRKMs. Section 5 takes into account Quaternion Radial Krawtchouk Moments Invariants (QRKMIs) of a test color image for different orders of reconstruction. Section 6 describes the training multilayer perceptron. Some experimental results are presented in Sec. 7, where an evaluation of accurate and computation through some color images have been used. Finally, the conclusions of this research are seen in Sec. 8.
2 Computation of the quaternion radial Krawtchouk moments
2.1 Recurrence relation of Krawtchouk polynomials
The Hyper geometric Krawtchouk polynomial is defined as.
Where the orthogonal property of normalized orthogonal polynomial can be rewritten as.
with (a)k is the Pochhammer symbol and δnm denote the Dirac function; therefore, the three term recursive relation for the weighted Krawtchouk polynomials is given by.
Where.
with n ≥ 2 and the first orders of discrete weighted Krawtchouk polynomials are defined as.
where
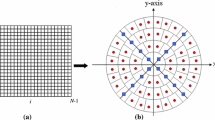
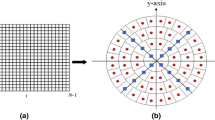
2.2 Proposed computations of quaternion radial Krawtchouk moments
The radial Krawtchouk Moments can be rewritten as.
Where
Taking into consideration the proposed value for the quaternion μ, The QRKMs of an RGB image in polar pixels are given by
Finally,
Where,
3 Color image reconstruction using QRKMs
The color image f(r,θ) can be reconstructed using the inverse transformation of QRKMs is given by
With
With
Note that \( {\hat{f}}_B\left(r,\theta \right) \), \( {\hat{f}}_C\left(r,\theta \right) \) and \( {\hat{f}}_D\left(r,\theta \right) \) represent the red, green, and blue color of the reconstructed image, respectively, and L is the maximum order of QRKMIs used in the reconstruction. Typically, the reconstruction formula has been used to recover the image information up to a certain level of approximation.
The difference between the original image and the reconstructed image is measured using the mean squared error (MSE).Which is defined as follows:
Where f(r, θ) represents the original color image vector and \( \hat{f}\left(r,\theta \right) \) the reconstructed color image.
4 Quaternion radial Krawtchouk moments invariants
In this section, we show a rotation, scaling and translation invariance of Quaternion Radial Krawtchouk Moments invariants (QRKMIs) from [2].
For this, we will them show the invariant moment to be linear combination as well as radial complex moment.
The translation invariance of QRKMs can be easily achieved by transforming the 2D color image to the geometric centre before the calculation of QRKMs. In spite of the scaling and rotation invariance which can be achieved then replacing complex moments, with the 2D complex moment invariants due to Quaternion Radial Krawtchouk moments invariants can be expressed as linear combination of 2D complex moments. In this subsection, we introduce a new and direct method to derive the scaling and rotation invariance of quaternion radial Krawtchouk moments invariants.
Let frs(r, θ) be the scaled, and rotated version of image function f(r, θ) with the scale factor λ and rotation angle θ0 we have
According to Eq. (5), the QRKMs of scaled and rotated color image is:
By letting \( {r}^{\prime }=\frac{r}{\lambda }{\theta}^{\prime }=\theta +{\theta}_0 \).
Eq. (13) can be written as
Where the polynomial of Krawtchouk is defined [38]
and
and s(n-k,i) is the stirling numbers of the first kind, with s(k, 0) = s (0, i = 0, k ≥ 1, i ≥ 1) and s(0,0)=1.
Therefore, the relationship between the original and rotation scaled QRKMs can be formed as
where
To eliminate the scale factor, we construct the normalized rotation and scale invariants of QRKMIs
Then, 훹nm is scaling and rotation invariance of QRKMs for any orders n, m.
5 Pattern classification of multi-layer perceptron
5.1 Descriptor vector of color image
These QRKMIs can be used to form the descriptor vector of each color image. Specially that the latter composed of QRKMs up to order S, where S is experimentally selected.
The characteristic vectors V2D is represented as
To perform the recognition of color image to its appropriate classes. We use multi-layer perceptron from Vquery and Vtest where V represent the characteristic vectors V2D_Color_Image.
where the T-dimensional feature Vquery is represented as
and the T-dimensional training vector of class K is shown as
5.2 Classification of 2D color object using a multi-layer perceptron
The Learning of Multilayer Perceptron MLP is the process to adapt the connection weights. in order to obtain a minimal difference between the network output and the desired output. For this reason in the literature some algorithms are used as an Ant colony, but the most used called Back-propagation which is based on descent gradient techniques. Assuming that we used an input Layer with n0 neurons V2D _ Color _ Image = (r0,r1, …, rn) and a sigmoid activation function f(x) where
To get the network output, we need to compute the output of each unit in each layer. Now, consider a set of the hidden layers (h1, h2, …, hN), assuming that Ni is the neurons number in each hidden layer hi .
For the output of first hidden layer
Let’s admit a set of hidden layers (h1, ℎ 2, …, hN), assuming that ni is the neurons number in each hidden layer hi. For the outputs \( {h}_i^j \) of neurons in the hidden layers are calculated as follows:
Where \( {w}_{kj}^i \) is the weight between the neuron k in the hidden layer i and the neuron j in the hidden layer i+ 1, ni is the number of the neurons in the ith hidden layer, The output of the ith layers can be formulated by.
The network outputs are computed by
Where \( {w}_{kj}^N \) is the weight between the neuron k of the Nth hidden layer and the neuron j of the output layer, n is the number of the neurons in the Nth hidden layer, Y is the vector of the output layer, F is the transfer function and W is the weights matrix, it’s defined as follows

Where X is the input of neural network and f is the activation function and Wi is the matrix of weights between the ith hidden layer and the (i + 1)ℎ hidden layer for i= 1, …, N− 1, W0 is the matrix of weights between the input layer and the first hidden layer, and WN is the matrix of weights between the N th hidden layer and the output layer.
The Fig. 1 represent the Quaternion Discrete Radial Krawtchouk convolutional neural networks architecture.

Quaternion Discrete Radial Krawtchouk convolutional neural networks architecture
6 Numerical experiments
In this section, we show the reconstruction results obtained using some color test images. These RGB test images are shown in Fig. 2 using Eq. (12), we have reconstructed the three cases of test images.

Reconstructed color image using the proposed method compared with QLFMs. Color test image from (a) diabetic retina and (b) normal retina, dataset benchmarking diabetic (http://www.it.lut.fi/project/imageret/diaretdb1/).
6.1 Reconstruction results using QRKMs for color images
In this experiment result, the color image reconstruction capability of QRKMs is shown for Lena in Fig. 2 and diabetic retina in Fig.3. Several comparisons of means square error for different parameters of QRKMs in Figs.4 and 5 and the comparison with QLFMs is also given in this part. We use the statistical computation of normalization image reconstruction error to measure the performance of the color image reconstruction, we deduce that the QRKMs are more convenient instead of QLFMs .

Reconstructed color image of retina of size 128 × 128 using the proposed method.

MSE for Objects (a, b) with p = 0.3,0.5,0.8

MSE for objects (a, b) with different values of p.
The means square Error (MSE) (Fig. 5) for color image has been usually used to describe how well a color image can be retrieved by a small and big set of QRKMs.
6.2 Invariability for QRKMs
To validate the invariability for QRKMs of the QRKMIs, we use some objects from Coil-100 Database Fig. 6.

color image Database Coil-100 (http://www.cs.columbia.edu/CAVE/software/softlib/coil-100.php).
The selected order of the invariants (QRKMIs00; QRKMIs12; QRKMIs22; QRKMIs23, QRKMIs32) are computed for each image. The results of simulation the scaling invariances of color image Fig.7 are shown in Table 1, the translation invariances of color image Fig.8 are shown in Table 2, the rotation invariances of color image Fig. 9 are shown in Table 3. Finally, the ratio σ/μ can use to measure the capability of the proposed QRKMIs under different image transformation, where σ represents the standard deviation of QRKMs the different factors of each rotation, and μ is the equivalent mean value. The Table 1, 2 and 3 show that the ratio σ/μ is very low and consequently the QRKMIs are very stable under different types of color image Figs. 7, 8 and 9. Hence, the property of invariability of QRKMIs will be used to pattern classification.

Scaled color images of the obj6 (Coil - 100)

Translated color object from Coil – 100 database.

Rotated color object from Coil – 100 database.

Computation of Salt and Pepper Noise & Gaussian Noise for color image.
7 Classification the color image using QRKMs
In this subsection, we will discuss the classification the color image using QRKMs.
To validate the proposed approach for classification, we have taken the color image from the benchmarking diabetic dataset [32]. The total number of color images is 2 distributed as 89 images for each object. All color images of this database have the size 128 × 128 (after adaptation). The test set also degraded by Gaussian and salt and pepper noise with noise densities 1%, 2%, 3%, and 4%. Figure 10 show the densities of Salt and Pepper Noise & Gaussian Noise for color image. The feature vector based on QRKMIs is use to classify these images and its recognition accuracy is compared with that of quaternion Legendre–Fourier momentsThe results of the classification using all features are presented in Table 4.
8 Conclusion
In this paper, we suggested a new method to calculate the Quaternion Radial Krawtchouk moments, we have also proposed a classification of multi-layer perceptron of Quaternion Radial Krawtchouk moments. The performances of the proposed Quaternion Radial Krawtchouk moments invariants have been tested under different color images. The results obtained show that the representation capability is compared with different color of the same image. This proposed approach has been significantly improved by using the multi-layer perceptron for classification of Quaternion Radial Krawtchouk moments and can highly be useful in the field of color image analysis, and the test of color images are clearly classified from a set of images that are available in benchmarking diabetic dataset for color image.
References
Amakdouf H, El Mallahi M, Zouhri A, Qjidaa H (2018) Classification and recognition of 3D image of charlier moments using a multilayer perceptron architecture. Procedia Computer Science 127(2018):226–235
Cao L, Zhi R, Jin Y (2018) Translation and scale invariants of krawtchouk moments. Inf Process Lett 130(C):30–35
Chen B, Shu H, Zhang H, Chen G, Luo L (2010) Color image analysis by quaternion zernike moments. In: Proceedings - international conference on pattern recognition
Chen BJ, Shu HZ, Zhang H, Chen G, Toumoulin C, Dillenseger JL, Luo LM (2012) Quaternion Zernike moments and their invariants for color image analysis and object recognition. Signal Process 92:308–318. https://doi.org/10.1016/j.sigpro.2011.07.018
Chen B, Shu H, Coatrieux G, Chen G, Sun X, Coatrieux JL (2014) Color image analysis by quaternion-type moments. J Math Imaging Vis
Chen B, Qi X, Sun X, Shi YQ (2017) Quaternion pseudo-Zernike moments combining both of RGB information and depth information for color image splicing detection. J Vis Commun Image Represent 49:283–290. https://doi.org/10.1016/j.jvcir.2017.08.011
El Mallahi M, Mesbah A, El Fadili H, Zenkouar K, and Qjidaa H. (2014) Compact computation of krawtchouk moments for 3D object representation. WSEAS transactions on circuits and systems E-ISSN: 2224-266X,13.
El Mallahi M, Mesbah A, El Fadili H, Zenkouar K, et H. Qjidaa. (2015) Translation and scale invariants of three-dimensional Krawtchouk moments, IEEE 2015 intelligent systems and computer vision, ISCV .
El Mallahi M, Mesbah A, Qjidaa H. (2016). “An algorithm for fast computation of 3D Krawtchouk moments for volumetric image reconstruction”, Proceedings of the Mediterranean Conference on Information & Communication Technologies 2015 pp 267-276
El Mallahi M, Mesbah A, El Fadili H, Zenkouar K, et Qjidaa H (2016) “Volumetric image reconstruction by 3D hahn moments.” 2015 ieee/acs 12th international conference of computer systems and applications (AICCSA).
El Mallahi M, Mesbah A, Qjidaa H (2016) “Fast algorithm for 3D local feature extraction using Hahn and Charlier moments” advances in ubiquitous networking 2, Lecture notes in electrical engineering, vol 397. Springer, Singapore
El Mallahi M, Zouhri A, EL-mekkaoui J, Qjidaa H (2017) Three dimensional radial Krawtchouk moment invariants for volumetric image recognition. Pattern Recognit Image Anal 27(4):810–824
El Mallahi, M. et al. (2017) ‘Three dimensional radial tchebichef moment invariants for volumetric image recognition’, Pattern Recognition and Image Analysis
El Mallahi M, Zouhri A, Mekkaoui J and Qjidaa H (2017) “Radial Meixner moments for rotational invariant pattern recognition”, IEEE 2017 intelligent systems and computer vision, ISCV .
El Mallahi, M. et al. (2017) Radial charlier moment invariants for 2D object/image recognition, in international conference on multimedia computing and systems -proceedings
El Mallahi M, Zouhri A, Amakdouf H, Qjidaa H (2018) Rotation scaling and translation invariants of 3D radial shifted Legendre moments. Springer, International Journal of Automation and Computing, Springer, April 2018 15(2):169–180
M. El Mallahi, A. Mesbah, et H. Qjidaa. (2018).“3D radial invariant of dual hahn moments.” Springer, Neural Computing and Applications. , Vol. 30, Issue 7, pp 2283–22.
El Mallahi M, Zouhri A, Mesbah A, El Affar I, Qjidaa H (2018) Radial invariant of 2D and 3D Racah moments. Springer, Multimedia Tools and Applications An International Journal 77(6):6583–6604
Mesbah A, El Mallahi M, Qjidaa H (2016) “Fast and efficient computation of three-dimensional Hahn moments” SPIE. Journal of electronic imaging 25(6):061621
Mesbah A, Zouhri A, El Mallahi M, Qjidaa H. (2017).“Robust reconstruction and generalized dual hahn moments invariants extraction for 3d images” spriger, 3D Research Center, Kwangwoon University and Springer-Verlag Berlin Heidelberg, vol. 8, num. 7, Issues 29
Mukundan, R. (2012) ‘A comparative analysis of radial-Tchebichef moments and Zernike moments’, in. doi: https://doi.org/10.5244/c.23.16.
Wang XY, Li WY, Yang HY, Wang P, Li YW (2015) Quaternion polar complex exponential transform for invariant color image description. Appl Math Comput 256:951–967. https://doi.org/10.1016/j.amc.2015.01.075
Xiang-Yang W, Wei-Yi L, Hong-Ying Y, Pan-Pan N, Yong-Wei L (2015) Invariant quaternion radial harmonic Fourier moments for color image retrieval. Opt Laser Technol 66:78–88. https://doi.org/10.1016/j.optlastec.2014.07.020
Xiao B, Ma JF, Cui JT (2012) Radial Tchebichef moment invariants for image recognition. J Vis Commun Image Represent 23:381–386
Xiao B, Wang GY, and Li WS (2014) Radial shifted legendre moments for image analysis and invariant image recognition Image Vis. Comput.
Xiao B, Zhang Y, Li L, Weisheng L, Wang G (2016) Explicit Krawtchouk moment invariants for invariant image recognition. J Electron Imaging 25(2):023002
Acknowledgements
I would like to express my deep gratitude to Dr. Amal Zouhri, for her advice and assistance in keeping my progress on schedule. I would also like to thank Professor Mostafa EL MALLAHI and Professor Hassan Qjidaa, my research supervisors, for their patient guidance, enthusiastic encouragement and useful critiques of this research work. Finally, I wish to thank my parents for their support and encouragement throughout my study.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Amakdouf, H., Zouhri, A., EL Mallahi, M. et al. Color image analysis of quaternion discrete radial Krawtchouk moments. Multimed Tools Appl 79, 26571–26586 (2020). https://doi.org/10.1007/s11042-020-09120-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-020-09120-0