
Abstract
Dynamic equivalent modeling is convenient to the vibration controller design of large space truss structures. Consequently, it is important to study the effectiveness of designed vibration controller of the original truss structures based on the equivalent dynamic models. In this study, the dynamic modeling and vibration control for a large flexible space truss are investigated. The space truss is typical periodic triangular prism structure which consists of beams and rods. Considered the transverse deformation of the whole structure, the equivalent dynamic model of the space truss is established using energy equivalence principle. The fourth-order governing equations of the cantilevered equivalent beam model are derived and solved by adopting the Hamilton principle and the Galerkin method to achieve its discrete dynamic model. To obtain analytical mode shapes of the established equivalent model, an exact analytical approach is exploited for purpose of constructing state space equation of the space truss. Then the validity and accuracy of the equivalent beam model are demonstrated by comparing the natural frequencies and mode shapes with the original space truss finite element model. More importantly, to further design the active vibration controller of the space truss based on the equivalent beam model, the LQR vibration controller is designed when the space truss is subjected to periodic and impulse excitations. The control moment is applied to the full-scale finite element model of the space truss and the numerical simulations prove the effectiveness of the designed LQR vibration controller for the vibration suppression of the space truss. Results indicate that the established equivalent beam model is valid and particularly convenient for the vibration suppression of the large space truss, which can successfully settle the difficulty caused by the high degree of freedom of the finite element model of the large truss to its vibration controller design.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
During the service period of large-scale space structure after its deployment and locking, it could be subjected to periodic thermal excitation caused by entering and leaving the earth’s shadow, and transient excitation caused by the attitude adjustment, unbalanced inertia force, as well as the space debris, etc. [1, 2]. The large truss structures have the characteristics of large size, great flexibility, light weight, and weak damping, which induce the low frequencies and weak ability of resisting deformation result in the slow decay of dynamic response [3]. Therefore, in order to improve service quality, prolong structural life and reduce energy consumption, the vibration rapid suppression of large truss structures has become a hot and vital topic [4]. The dynamic analysis of the large flexible space trusses using the finite element method (FEM) is a common way. However, the degree-of-freedom of the finite element model is too large to design vibration controller conveniently and the numerical simulation generally bears a huge amount of computational resources, as pointed out in Ref. [5]. In order to overcome those drawbacks of FEM, equivalent modeling methodology is called for the dynamic analysis and vibration control for truss structures [6,7,8].
The large truss structures are distributed parameter systems consequently infinite dimensional in theory and very large dimensional in practice [9]. Distributed control system needs to install a large number of light and simple actuators and its mechanical and dynamic characteristics, meanwhile, cannot be significantly changed [10]. Owing to those characteristics, the study on the dynamics and control of large flexible space truss structures has been paid attention by many researchers [11, 12]. Gaul et al. [13] presented an approach for vibration suppression of quadrangular truss structure based on the reduced model. Park and Kim [14] used a dry friction damper to reduce transient vibrations of a quadrangular space truss and the multi-dof truss model is reduced order by modal transformation. A fast prototyping method was developed by Gosiewski and Koszewnik for the active vibration control system of 3D truss structure. In view of the finite element modeling conception, they reduced the mathematical model and decoupled the TITO system into SISO system [15]. Applying the finite element model of truss structure, Carvalhal et al. [16] and Luo et al. [17] presented a modal control strategy and designed experiment to suppress the structural vibration, respectively. However, this method will become quite involved for the large and complexity trusses. The integrated optimization of actuator placement and vibration control for piezoelectric adaptive truss was investigated by Li and Huang [18] based on the dynamic finite element model and LQG method. It should be mentioned that the modes obtained from FEM are numerical form rather than analytical expressions, which cause the discretization process of this method too tedious to model the large-scale truss structures. Meanwhile, it will consume plenty of CPU resources with the increase of the model size.
Recently, the intelligent control (such as the neural network, fuzzy logic, etc.) of distributed parameter system has made progress. Li et al. [19] proposed a decentralized adaptive fuzzy control method for the optimal vibration control of T truss structure based on sliding control method. To improve the vibration suppression performance of structure, Luo et al. [20] developed a hybrid control algorithm and a fuzzy controller for large ring truss and checked the validity by experiment. Yan and Yam [21] adopted genetic algorithms to search optimal number and locations of actuators for suppressing the vibration of the space truss. Lin and Zheng [22] developed an genetic algorithm for vibration control of rotating truss structure according to the neuro-fuzzy control. Although, the intelligent control is an alternative approach to suppress the vibration of the distributed parameter systems, here existing many issues in such designs (like selection of basis function, appropriate choice of fuzzification, etc.), which need further attention [23].
For the active vibration control based on the dynamics concept, one of the challenges in the control law design of truss structures is the requirement of model order reduction to deal with such high degree of freedom systems. According to the established equivalent continuum model, the existing vibration control methods can be effectively applied to the distributed parameter system, which is one of the important advantages compared with FEM [24]. Typically, the equivalent continuum modeling conception of lattice structures employing the energy equivalence principle was proposed by Noor [25]. Similarly, applying the equivalent modeling method, an equivalent beam model of beamlike truss with pin joints is established in Ref. [26]. For the pin-jointed double-layer hoop space antenna truss, Guo et al. [27] obtained an equivalent hoop beam model and compared the natural frequencies and mode shapes with the finite element model of original truss structure. Different from the pin-jointed truss structures, the equivalent micropolar beam model was formulated using the micropolar elasticity theory for the rigid-jointed truss structures [28]. Karttunen et al. [29] derived a 1-D micropolar Timoshenko beam finite element model for bending vibration of the web-core beam assuming flexible joint have a linear rotational stiffness. An equivalent dynamic model was constructed for the hoop truss employing Timoshenko beam theory [30]. Besides, Liu et al. [8] developed a dynamic equivalent modeling method for complex space antenna truss with initial stress and established an equivalent nonlinear beam model considering the geometric nonlinearity of the beamlike truss in Ref. [31]. Zhang et al. [32] investigated the nonlinear dynamic behavior of a beam-ring structure to imitate the circular truss antenna subjected to the periodic thermal excitation. Lamberson and Yang [33] designed the feedback controller of platelike truss using its equivalent continuum model and analyzed the natural characteristics of the system. Salehian et al. [6] built a continuum model of a space radar antenna truss with pin joints for the purpose of the vibration suppression utilizing LQR method. To obtain the required transfer function of a hybrid model constructed by beams and rods, Bennett and Kwatny [34] gave the process of solution and established the state space model for the system. The flexible structure was divided into multiple autonomous substructures taking advantage of the equivalent modeling concept and the distributed cooperative control with a decentralized sensor and actuator was implemented [35]. Although the dynamic equivalent modeling methodology for truss structures has been investigated by many researchers, there are quite a few researches focused on the active vibration control of large space trusses based on the equivalent continuum models. However, it is necessary to study whether the classical control methods can be used to design the vibration controller of the original truss structures and our work fills this gap in this paper.
The objective of this paper is to derive the partial differential equations of motion of a large flexible space truss and to design LQR vibration controller using the derived PDEs based on the equivalent continuum model. Differing from the existing vibration control strategy researches for large space trusses, we extend the approach developed in Ref. [36] to solve the PDE of the equivalent beam model of the space truss and construct sate space model for the space truss adopting the analytical mode shapes. The organization of the article is as follows: The equivalent dynamic model of the large space truss with cantilevered boundary condition is constructed in Sect. 2. Section 3 presents an analytical solution method to obtain the state space model for the space truss. In Sect. 4, the accuracy and effectiveness of the equivalent beam model are assessed by comparing the results with those of the space truss. And, the vibration suppressions of the equivalent beam model and the space truss subjected to periodic and impulse excitations also are studied. Finally, Sect. 5 concludes this investigation.
2 The equivalent dynamic model of space truss
In this section, the equivalent modeling method for the space truss and its equivalent dynamic model are presented briefly.
2.1 Description of space truss
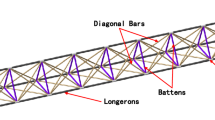
The large space truss structure has a similar configuration with that of in Ref. [31]. The triangular prism beamlike truss is shown in Fig. 1. The o-xyz is defined as the Cartesian coordinate system, of which the origin is at the fixed end and x-axis is along the central axis of the space truss.

The space truss after fully expanded state
2.2 Establishment of equivalent beam model
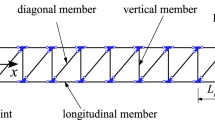
Firstly, separating a repeating element from the space truss and building the coordinate system (see Fig. 2), the detailed derivation process about the equivalent modeling and the symbolic representation can refer to the Ref. [8]. The displacement components of the repeating element are expressed as
where \(u_{x0}\), \(u_{y0}\), \(u_{z0}\), \(\theta_{x0}\), \(\theta_{y0}\) and \(\theta_{z0}\) are displacement and rotation components at the center of the spatial repeating element; \(\varepsilon_{x0}\), \(\varepsilon_{y0}\), \(\varepsilon_{z0}\), \(\gamma_{xy0}\), \(\gamma_{xz0}\), \(\gamma_{yz0}\), \(\kappa_{x0}\), \(\kappa_{y0}\) and \(\kappa_{z0}\) are strain and curvature measures evaluated corresponding position.

The repeating element of the space truss structure
The equivalent continuum model of the space truss shown in Fig. 3 is established employing the energy equivalence principle. Its equivalent stiffness and mass can be defined as [31]
where \(\overline{EI}_{z}\) denotes the equivalent bending stiffness; \(\overline{GA}_{xy}\) denotes the shearing stiffness. \(\overline{\rho A}\) is the mass per unit length; \(\overline{J}_{z}\) is the rotational inertia per unit length; \(L\) is the length of the repeating element. The representations of strain and kinetic energy coefficients \(C_{22}\), \(C_{66}\), \(B_{22}\), \(B_{66}\) see the Appendix A in Ref. [31].

Equivalent beam model of the space truss
The space truss is regular triangular prism and symmetric about x axis thus the bending vibration forms on y and z directions are same. The bending and torsion vibrations are not coupled. Therefore, the bending vibration of the space truss on o-xy plane is studied in this paper. The strain energy due to bending and shearing deformations stored energy in system, and kinetic energy of the equivalent beam model can be obtained as
where the dot and prime notations denote the differentiations with respect to the time t and coordinate x, respectively. Subsequently, employing the Hamilton principle, the expression is written as
where \(\delta W_{F}\) and \(\delta W_{D}\) are the work done by the external force and viscous damping, respectively.
It is assumed that the space truss is subjected to periodic displacement excitation \(w_{s} (t) = w_{0} \sin (\Omega t)\) at the fixed end and the control moment \(M_{c} (t)\) is acted on the free end of the structure. Substituting Eqs. (4)-(5) into Eq. (6), the governing equations of the equivalent beam model are expressed as
Combining Eqs. (7) and (8) to eliminate the variation \(\theta_{z}\), the governing equation of transverse deflection \(u_{y}\) is given by
where \(M_{c} (t)\) represents control moment; \(c_{d}\) and \(c_{r}\) are viscous damping coefficients for transverse displacement and rotation, respectively; The dot denotes the differentiation with respect to the time. Superscripts (4) and (3) stand for fourth and third derivations with respect to the time.
The following boundary conditions for the cantilevered equivalent beam model are expressed as follows:
where M and S stand for the moment and shearing force, respectively.
3 Analytical solution method and vibration controller design
In this section, an analytical solution method is exploited to obtain the mode shapes of the equivalent beam model. Then, the discrete dynamic model of the equivalent beam model is achieved using the Galerkin method. Finally, the vibration controller is designed based on the Linear Quadratic Regulator (LQR) control method in order to achieve the vibration suppression of the space truss.
3.1 Analytical modes
To solve the natural frequencies and modal shapes of the equivalent beam model, the solution of the governing equation of Eq. (9) can refer to the method displayed in Ref. [36]. The transverse displacement \(u_{y} (x,t)\) is selected as
where \(U_{y} (x)\) is the amplitude of \(u_{y}\); \(\omega\) is the circular frequency.
Introducing the differential operator \(D = {d \mathord{\left/ {\vphantom {d {dx}}} \right. \kern-\nulldelimiterspace} {dx}}\) and dropping the external excitation and control moment items, the Eq. (9) becomes four order ordinary differential equation and can be obtained as follows:
where
Setting the solution in form of \(U_{y} (x) = e^{\lambda x}\), the characteristic equation of the differential equation Eq. (12) is then given by
Equation (14) can be further simplified to be a square equation, as
where \(\mu { = }\lambda^{2}\).
Utilizing the technique similar to the one presented in [36], the solution \(U_{y} (x)\) can be given in terms of trigonometric and hyperbolic functions. Assuming the roots of the Eq. (15) are \(\alpha\) and \(\beta\), the solution \(U_{y} (x)\) can be expressed as
where \(A_{1} - A_{4}\) are constants and
The displacement and force boundary conditions for the cantilevered equivalent beam model are as follows.
For the fixed end:
For the free end:
In order to obtain the unknown coefficients \(A_{1} - A_{4}\), substituting Eq. (16) into the boundary Eqs. (18)-(19) yields the characteristic equations
where H is the matrix of \(4 \times 4\) dimensions; A is the unknown coefficient vector expressed as
The necessary and sufficient condition for nonzero solutions in the vector A of Eq. (20) is that the determinant of H must be set up as
Thus, the natural frequencies of the equivalent beam model can be obtained by Eq. (22). The mode functions can be determined further, where the coefficients \(A_{1} - A_{4}\) are yielded by solving Eq. (20) combining with the boundary conditions Eqs. (18) and (19).
3.2 LQR controller design
As shown Eq. (9), the dynamic model is a distributed parameter system described by partial differential equations, which contains infinite number of degrees of freedom and is difficult to be directly used for the calculations of dynamic response and design of vibration controller. Therefore, the Galerkin method is adopted to reduce the order of the system and the first three modes are taken to obtain the discrete dynamic model expressed by ordinary differential equations.
The transverse displacement of the equivalent beam model is assumed as the following approximate series expansions:
in which \(U_{yi} (x)\) is the ith mode function for the transverse motion and \(q_{i} (t)\) is the corresponding generalized coordinate in transverse direction. Considering the first three order mode shapes and having the \({\mathbf{q}} = [q_{1} ,q_{2} ,q_{3} ]^{{\text{T}}}\), Eq. (23) is substituted into Eq. (9) and the resultant equation is multiplied by the corresponding mode shape \(U_{yi} (x)\) and integrated from 0 to 1, which yields the following ordinary differential equations:
where D, E, M, C and K are \(3 \times 3\) matrices; q is state vector; Q and S are vectors of external excitation and control moment, respectively. Superscripts (4) and (3) represent the fourth and third derivations with respect to the time.
Using the linear quadratic regulator (LQR) method, vibration controller is designed for vibration suppression based on discrete dynamic model of the equivalent model for the purpose of suppressing the vibration of the large space truss. The state space model of the system can be obtained from Eq. (24), as
where A is \(12 \times 12\) matrix; B and F is \(12 \times 1\) vectors; and
The control moment \(M_{c}\) is defined as
where G is the control gain matrix. \(M_{c}\) minimizes a quadratic performance index that is a cost function of the system state and control input
where Q is a semi-positive definite matrix and R is a positive weighting scalar. The gain matrix G can be given by
where P satisfies the solution of the following Riccati equation:
Thus, the control moment \(M_{c}\) is expressed as follows:
Obviously, according to the equivalent beam model of the large space truss, low order discrete dynamic model of the space truss can be obtained based on equivalent modeling concept. Actually, comparing with FEM, the mode approach can significantly reduce the number of degree of freedom for the system and thus increases computational efficiency.
4 Comparative results analysis of equivalent beam model and space truss
From the natural characteristic and dynamic response aspects, the comparisons of the space truss and its equivalent beam model are investigated in this section to validate the effectiveness of the designed vibration controller. The model parameters of the space truss refer to those of Ref. [31]. The thicknesses of longerons and diagonal are 2 mm and 4 mm, respectively.
4.1 Natural characteristics
The natural characteristics of the equivalent beam model obtained by Eq. (9) are given and compared with the results of the space truss obtained by the business software ANSYS to verify the validity. The first three order modes of structures are selected and compared in this subsection.
Table 1 shows the first three vibration frequencies for the equivalent beam model and the space truss obtained by Eq. (9) and FEM, respectively. The relative errors can be obtained by
where \(f_{{{\text{EBM}}}}\) and \(f_{{{\text{DT}}}}\) represent the frequencies obtained by equivalent beam model and space truss, respectively. The space truss model established by FEM has 2160 beam elements and 216 link elements. That means the dimension of the computing matrix of the finite element model is very large compared with the Eq. (9), which has the matrix with \(4 \times 4\) dimensions. According to Table 1, it can be known from the relative errors that results of the equivalent beam model are precise enough and in good agreement those of space truss, where the maximum error is no more than 0.82%. That demonstrates the validity of the equivalent beam model by analytical algorithm.
The first three mode shapes are shown in Fig. 4, where it can be seen that the results obtained by space truss and the equivalent beam model are coincided well. The validity of the equivalent beam model is further verified. Furthermore, the mode functions of equivalent beam model are expressed by analytical forms, which is an advantage not available to the finite element method.

The first three mode shapes of space truss and equivalent beam model: a 1st mode, b 2nd mode and c 3rd mode
The analytical mode shapes may lead the investigations of vibration controller design and nonlinear analysis in analytical algorithm to become convenient for the large space truss.
4.2 Dynamic response and vibration suppression
In this subsection, the dynamic responses of the equivalent beam model and space truss are exhibited under different external excitations to validate that the designed control law can effectively suppress the vibration of the space truss. Moreover, the effect of the damping and control parameters is analyzed to check attenuation of equivalent beam model and space truss. The vibration control of the space truss is implemented using the control moment obtained from the equivalent beam model.
4.2.1 Periodic excitation
The cantilevered end of the space truss is subjected to sinusoidal displacement excitation \(w_{s} (t) = w_{0} \sin (\Omega t)\). The dynamic responses of the space truss and equivalent beam model under \(w_{0} = 0.05{\kern 1pt} \;{\text{m}}\) and \(\Omega { = 0}{\text{.25}}\;{\text{Hz}}\) are shown in Fig. 5. It can be seen clearly from the Fig. 5a and b that the displacement time histories in 30 s of the two systems without LQR controller have a similar trend and the curves are substantially identical. The frequency of external excitation \(\Omega\) is close to the first natural frequency \(\omega_{1} { = }0.30\;{\text{Hz}}\) and thus the vibration amplitude of two systems is relatively large resulting in resonance behavior. Let feedback control parameters \(R = 1\) and Q = diag(10,000,000,000…1)12×12. In Fig. 5c and d are shown the space truss and equivalent beam model with LQR controller. It can be immediately observed that the vibration of the two systems is suppressed well and the maximum amplitude of \(u_{y} (x,t)\) from 0.41 m reduce to approximate 0.08 m. Meanwhile, it can be known that the vibration suppression effect of the space truss and the equivalent beam model is coincident and the results reveal the designed LQR vibration controller based on the equivalent beam model can effectively suppress the dynamic responses, which demonstrates the validity and advantages in the vibration controller design of the large space truss based on the dynamic equivalent modelling.

Responses at the free end with \(w_{0} = 0.05\;{\text{m,}}\;\Omega { = 0}{\text{.25}}\;{\text{Hz}}\) a space truss without control, b equivalent beam model without control, c space truss with control and d equivalent beam model with control
Varying the amplitude \(w_{0}\) and frequency \(\Omega\) of the external excitation, the parameter influences on the structural dynamic responses and vibration control are investigated. The time histories under \(w_{0} = 0.05\;{\text{m}}\) and \(\Omega { = 0}{\text{.2}}\;{\text{Hz}}\) is illustrated to show the validity study and effect analysis, as shown in Fig. 6. As is evident, it can be seen that the uncontrolled and control dynamic responses at fixed end obtained from full-scale finite element model of the space truss are different obviously, as shown the full lines in Fig. 6a. The vibration amplitude of the space truss can be reduced by approximate 50% after implementing active control moment. The results demonstrate that the designed LQR vibration controller can suppress significantly the vibration displacement of the original space truss based on the proposed equivalent beam model. In addition, it can also be observed from the Fig. 6a that the dynamic response curves of the space truss and equivalent beam model are agree excellently, which can verify the equivalent beam model and achieve the control effect of the space truss utilizing its equivalent beam model. Figure 6b illustrates the control moment acted on the equivalent beam model and space truss. It can be found that the control moment changes periodically and the maximum values is 1586 \({\text{N}} \cdot {\text{m}}\), which can be acted on the space truss using piezoelectric patches.

Control state with \(w_{0} = 0.05\;{\text{m, }}\Omega { = 0}{\text{.2}}\;{\text{Hz}}\) a dynamic responses of space truss and equivalent beam model at free end and b control moment
It is then of interest to analyze the dynamic responses of the space truss when \(w_{0} = 0.1\;{\text{m}}\) and \(\Omega { = 0}{\text{.2}}\;{\text{Hz}}\). The results are shown in Fig. 7a for uncontrolled and controlled systems. Inspecting these plots, we note that the dynamic response curves for the controlled space truss and the controlled equivalent beam model have a similar trend in 100 s, which implies that the equivalent beam model can also capture the dynamic behavior under this load case. To assess the designed LQR controller, the dynamic responses of the uncontrolled and controlled space truss are compared, as shown in Fig. 7a, which presents that the LQR controller has excellent vibration suppression on the space truss and the maximum reduced rate of the vibration amplitude reaches up to 50% approximately. The comparisons demonstrate further the validity of the LQR controller to suppress successfully the vibration of the large space truss. Figure 7b plots diagrams of control moment and its maximum value is 3171 \({\text{N}} \cdot {\text{m}}\). It can be found that the required control moment increases with the increase \(w_{0}\) of to achieve same control effect.

Control state with \(w_{0} = 0.1\;{\text{m, }}\Omega { = 0}{\text{.2}}\;{\text{Hz}}\) a dynamic responses of space truss and equivalent beam model at free end and b control moment
4.2.2 Impulse excitation
To investigate comprehensively the influence of the designed controller based on the equivalent beam model on the vibration suppression of the space truss, the numerical comparisons between the equivalent beam model and space truss are presented with different structural initial displacements caused by impulse excitation. The uncontrolled and controlled dynamic responses of the equivalent beam model and space truss for initial displacements at the cantilevered end, namely \(u_{y} (L_{t} ,0) = 0.05\;{\text{m}},\;{0}{\text{.1}}\;{\text{m,}}\;{0}{\text{.2}}\;{\text{m,}}\;{0}{\text{.3}}\;{\text{m}}\), are depicted in Figs. 8, 9, 10 and 11. The damping parameters is \(c_{d} = 0.2640\;{\text{N}}\, {\text{s/m}}^{2}\) and \(c_{r} = 0.4756\;{\text{N}} \,{\text{s}}\). It can be seen from Figs. 8a–11a that the free vibration responses of the equivalent beam model match well with those of the space truss using full-scale finite element model in four different initial displacement conditions. The correctness of the proposed equivalent beam model is checked without controller. According to the number of the degree of freedom of the discrete dynamic model, the full state feedback control parameter is set to Q = diag(10,000,000)12×12. As shown the full lines in Figs. 8b–11b, the dynamic responses of the equivalent beam model are suppressed rapidly and significantly with the active vibration controller comparing with the corresponding dynamic responses in Figs. 8a–11a. More importantly, in order to study the active vibration control of the large space truss, the vibration control law in four conditions is applied to the space truss using ANSYS software to analyze the vibration suppression of the truss system. The numerical results (see the broken lines in Figs. 8b–11b) show that the designed vibration controller based on the equivalent beam model can also play a good performance on the vibration control of the space truss. It should be noted that the designed LQR vibration controller based on the equivalent beam model can suppress well the vibration of the space truss comparing with the uncontrolled system, but the vibration amplitude does not rapidly attenuate to zero in the late stage since the existence of the small inevitable equivalent error between the equivalent beam model and space truss. The micro vibration can be attenuated by damping effect and it will be discussed in next part.

Comparisons of displacement between space truss and equivalent beam model under \(u_{y} (L_{t} ,0) = 0.05\;{\text{m}}\) a without control and b LQR control

Comparisons of displacement between space truss and equivalent beam model under \(u_{y} (L_{t} ,0) = 0.1\;{\text{m}}\) a without control and b LQR control

Comparisons of displacement between space truss and equivalent beam model under \(u_{y} (L_{t} ,0) = 0.2\;{\text{m}}\) a without control and b LQR control

Comparisons of displacement between space truss and equivalent beam model under \(u_{y} (L_{t} ,0) = 0.3\;{\text{m}}\) a without control and b LQR control
4.2.3 Parameter analysis
This part investigates the influence of the damping and control parameter on the dynamic responses of the space truss and equivalent beam model. Simultaneously, the effectiveness of the designed LQR controller based on the equivalent beam model for suppressing the vibration of the space truss is explored by varying parameters.
-
(a)
Analysis of control parameter
According to the optimal control theory, the weight matrix Q affects the convergence speed of the control variable. The LQR vibration controller is designed based on the first three modes of the equivalent beam model and the influence of the weight matrix Q on the control convergence speed of the two systems including the space truss and equivalent beam model is discussed. The parameters for the numerical calculations: \(c_{d} = 0.2640\;{\text{N}} \cdot {\text{s/m}}^{2}\), \(c_{r} = 0.4756\;{\text{N}} \cdot {\text{s}}\) and \(u_{y} (L_{t} ,0) = 0.05\;{\text{m}}\). Figure 12a shows the transverse displacement curves of the space truss and equivalent beam model at the fixed end with weight matrix Q = diag(1,000,000)12×12, which reveals that the LQR controller can also play a good control effect on the space truss compared with the equivalent beam model. The control moment required to complete the suppression of the system vibration is performed in Fig. 12b and its maximum value is 814.2 \({\text{N}} \cdot {\text{m}}\). For the weight matrix Q = diag(100,000,000)12×12, as shown in Fig. 13a, it can be seen that the vibration displacements of the space truss and equivalent beam model can be rapidly suppressed and the maximum required control moment (as shown in Fig. 13b) is 971.4 \({\text{N}} \cdot {\text{m}}\). The results indicate that the attenuation rate of vibration displacements of two systems increases as the weight matrix Q increases. The investigation demonstrates that LQR vibration controller designed based on the first three mode shapes of the equivalent beam model can plays a consistent and good control performance on the equivalent beam model and space truss. Additionally, the vibration displacements of the systems fluctuate obviously and attenuate to zero slowly when the values of Q is relatively small. In summary, it is an effective and important strategy to design the vibration controller for the large space truss based on the dynamic equivalent modeling concept.
-
(b)
Analysis of damping parameter

The controller with Q = diag(1,000,000)12×12 a dynamic responses of space truss and equivalent beam model and b control moment

The controller with Q = diag(100,000,000)12×12 a dynamic responses of space truss and equivalent beam model and b control moment
Selecting the initial displacement \(u_{y} (L_{t} ,0) = 0.05\;{\text{m}}\) of the space truss at the free end and weight matrix Q = diag(10,000,000)12×12, the influence of damping on the dynamic behaviors is discussed. The dynamic responses of the uncontrolled space truss and equivalent beam model are presented in Fig. 14a with the damping parameters \(c_{d} = 0.1320\;{\text{N}} \cdot {\text{s/m}}^{2}\) and \(c_{r} = 0.2378\;{\text{N}} \cdot {\text{s}}\). It can be observed clearly that the free vibration responses of the two systems attenuate slowly in the case of low damping and are coincided between the space truss and equivalent beam model, which verifies the effectiveness of the equivalent beam model. Figure 14b gives the dynamic responses of two systems with LQR controller and the control performance is good. Similarly, for the case of \(c_{d} = 0.3960\;{\text{N}} \cdot {\text{s/m}}^{2}\) and \(c_{r} = 0.7133\;{\text{N}} \cdot {\text{s}}\), the attenuation rate of dynamic responses increases and agrees well shown in Fig. 15a. Comparing with Fig. 14b, it can be seen that the influence of the damping on the attenuation rate of the equivalent beam model is weak, but it can promote the attenuation of the micro vibration of the space truss, which is an advantage to reach to zero quickly for the micro vibration.

Displacements of space truss and equivalent beam model under \(c_{d} = 0.1320\;{\text{N}} \cdot {\text{s/m}}^{2}\) and \(c_{r} = 0.2378\;{\text{N}} \cdot {\text{s}}\) a without control and b LQR control

Displacements of space truss and equivalent beam model under \(c_{d} = 0.3960\;{\text{N}} \cdot {\text{s/m}}^{2}\) and \(c_{r} = 0.7133\;{\text{N}} \cdot {\text{s}}\) a without control and b LQR control
5 Concluding remarks
The LQR vibration controller was designed based on the equivalent beam model to suppress the vibration of the large space truss, which addressed successfully the difficulty of vibration controller design due to high degree of freedom of the finite element model. In this paper, an efficient equivalent beam model was established to capture the dynamic behaviors of the cantilevered space truss and obtain the state space model. The stiffness and mass of the equivalent beam model was achieved combining the geometrical relationship of Timoshenko beam. The Hamilton principle was employed to found the fourth-order governing equations of the equivalent beam model. Specially, an analytical solution method was exploited to establish the discrete dynamic model and construct state space model for the space truss. The first three natural frequencies and mode shapes of the equivalent beam model were validated by simulating the space truss in ANSYS and the results were in good agreement with those of the original space truss.
After the analytical solution of mode shapes of the equivalent beam model, the LQR vibration controller was designed under periodic and impulse excitations and its effectiveness on the vibration suppression of the space truss was studied based on the equivalent beam model. The results were verified by applying the control law obtained from the equivalent beam model to the full-scale finite element model of the space truss. To check the designed controller comprehensively, external excitation, damping and controller parametric studies were carried out. The vibration controller can play a good performance under different external excitations. Remarkably, vibration control strategies based on the modal approach of equivalent beam model can significantly reduce the number of degrees of freedom for space truss system and thus increase computational efficiency.
The vibration control strategy and theoretical framework for designing the controller of the space truss provide a new way to achieve effective vibration suppression for the large truss structures in aerospace and civil applications, etc.
References
Nakka YK, Chung S-J, Allison JT, Aldrich JB, Alvarez-Salazar OS (2019) Nonlinear attitude control of a spacecraft with distributed actuation of solar arrays. J Guid Control Dyn 42(3):458–475
Xing Z, Zheng G (2014) Deploying process modeling and attitude control of a satellite with a large deployable antenna. Chin J Aeronaut 27(2):299–312
Ma G, Xu M, Gao B, Zhang S, Hu Z (2017) The low frequency vibration control of the hoop truss structure with extended arm. J Low Freq Noise Vibr Active Control 36(3):294–305
He W, Ge SS (2015) Dynamic modeling and vibration control of a flexible satellite. IEEE Trans Aerosp Electron Syst 51(2):1422–1431
Jain S, Tiso P (2018) Simulation-free hyper-reduction for geometrically nonlinear structural dynamics: a quadratic manifold lifting approach. J Comput Nonlinear Dynam 13(7):071003
Salehian A, Seigler TM, Inman DJ (2006) Control of the continuum model of a large flexible space structure, ASME. Int Mech Eng Congress Expos 2006:561–570
Piccardo G, Tubino F, Luongo A (2019) Equivalent Timoshenko linear beam model for the static and dynamic analysis of tower buildings. Appl Math Model 71:77–95
Liu M, Cao D, Zhu D (2020) Equivalent dynamic model of the space antenna truss with initial stress. AIAA J 58(4):1851–1863
Balas M (1982) Trends in large space structure control theory: fondest hopes, wildest dreams. IEEE Trans Autom Control 27(3):522–535
Luo Y, Xu M, Yan B, Zhang X (2015) PD control for vibration attenuation in hoop truss structure based on a novel piezoelectric bending actuator. J Sound Vib 339:11–24
Ma G, Gao B, Xu M, Feng B (2018) Active suspension method and active vibration control of a hoop truss structure. AIAA J 56(4):1689–1695
Gao W, Zhang N (2007) Optimal active random vibration control for smart truss structures based on reliability. Proc Inst Mech Eng C J Mech Eng Sci 221(11):1299–1308
Gaul L, Albrecht H, Wirnitzer J (2004) Semi-active friction damping of large space truss structures. Shock Vib 11(3–4):173–186
Park Y-M, Kim K-J (2013) Semi-active vibration control of space truss structures by friction damper for maximization of modal damping ratio. J Sound Vib 332(20):4817–4828
Gosiewski Z, Koszewnik AP (2013) Fast prototyping method for the active vibration damping system of mechanical structures. Mech Syst Signal Process 36(1):136–151
Carvalhal R, Júnior VL, Brennan MJ (2007) An efficient modal control strategy for the active vibration control of a truss structure. Shock Vib 14(6):393–406
Luo H, Fu J, Wang P, Wang H (2018) Design analysis and experimental verification of vibration reduction of spatial composite damping truss structure. Adv Mech Eng 10(12):1687814018819346
Li W, Huang H (2013) Integrated optimization of actuator placement and vibration control for piezoelectric adaptive trusses. J Sound Vib 332(1):17–32
Li D, Liu W, Jiang J, Xu R (2011) Placement optimization of actuator and sensor and decentralized adaptive fuzzy vibration control for large space intelligent truss structure. Sci China Technol Sci 54(4):853–861
Luo Y, Zhang Y, Xu M, Fu K, Ye L, Xie S, Zhang X (2019) Improved vibration attenuation performance of large hoop truss structures via a hybrid control algorithm. Smart Mater Struct 28(6):65007
Yan Y, Yam L (2002) Optimal design of number and locations of actuators in active vibration control of a space truss. Smart Mater Struct 11(4):496
Lin J, Zheng Y (2012) Vibration suppression control of smart piezoelectric rotating truss structure by parallel neuro-fuzzy control with genetic algorithm tuning. J Sound Vib 331(16):3677–3694
Padhi R, Ali SF (2009) An account of chronological developments in control of distributed parameter systems. Annu Rev Control 33(1):59–68
Yang B, Tan CA (1992) Transfer functions of one-dimensional distributed parameter systems. J Appl Mech 59(4):1009–1014
Noor AK, Anderson MS, Greene WH (1978) Continuum models for beam-and platelike lattice structures. AIAA J 16(12):1219–1228
Salehian A, Inman D, Cliff E (2006) Natural frequencies of an innovative space based radar antenna by continuum modeling. In: Proceedings of the 47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference 14th AIAA/ASME/AHS Adaptive Structures Conference 7th, 2006
Guo H, Shi C, Li M, Deng Z, Liu R (2018) Design and dynamic equivalent modeling of double-layer hoop deployable antenna. Int J Aerospace Eng 2018:2941981
Noor AK, Nemeth MP (1980) Micropolar beam models for lattice grids with rigid joints. Comput Methods Appl Mech Eng 21(2):249–263
Karttunen AT, Reddy J, Romanoff J (2019) Two-scale constitutive modeling of a lattice core sandwich beam. Compos B Eng 160:66–75
Liu F, Jin D, Wen H (2017) Equivalent dynamic model for hoop truss structure composed of planar repeating elements. AIAA J 55(3):1058–1063
Liu M, Cao D, Zhang X, Wei J, Zhu D (2021) Nonlinear dynamic responses of beamlike truss based on the equivalent nonlinear beam model. Int J Mech Sci 194:106197
Zhang W, Wu R, Behdinan K (2019) Nonlinear dynamic analysis near resonance of a beam-ring structure for modeling circular truss antenna under time-dependent thermal excitation. Aerosp Sci Technol 86:296–311
Lamberson S, Yang T (1985) Continuum plate finite elements for vibration analysis and feedback control of space lattice structures. Comput Struct 20(1–3):583–592
Bennett W, Kwatny H (1989) Continuum modeling of flexible structures with application to vibration control. AIAA J 27(9):1264–1273
Liu X, Liu H, Du C, Lu P, Jin D, Liu F (2020) Distributed active vibration cooperative control for flexible structure with multiple autonomous substructure model. J Vib Control 26(21–22):2026–2036
Liu M, Cao D, Zhu D (2020) Coupled vibration analysis for equivalent dynamic model of the space antenna truss. Appl Math Model 89:285–298
Acknowledgements
This research was supported by the National Natural Science Foundation of China (Grant Nos. 11732005 and 12002298).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Liu, M., Cao, D., Li, J. et al. Dynamic modeling and vibration control of a large flexible space truss. Meccanica 57, 1017–1033 (2022). https://doi.org/10.1007/s11012-022-01487-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-022-01487-8