
Abstract
This paper extends the model reduction method by the operator projection to the one-dimensional special relativistic Boltzmann equation. The derivation of arbitrary order globally hyperbolic moment system is built on our careful study of two families of the complicate Grad type orthogonal polynomials depending on a parameter. We derive their recurrence relations, calculate their derivatives with respect to the independent variable and parameter respectively, and study their zeros and coefficient matrices in the recurrence formulas. Some properties of the moment system are also proved. They include the eigenvalues and their bound as well as eigenvectors, hyperbolicity, characteristic fields, linear stability, and Lorentz covariance. A semi-implicit numerical scheme is presented to solve a Cauchy problem of our hyperbolic moment system in order to verify the convergence behavior of the moment method. The results show that the solutions of our hyperbolic moment system converge to the solution of the special relativistic Boltzmann equation as the order of the hyperbolic moment system increases.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The beginning of the relativistic kinetic theory goes back to 1911 when an equilibrium distribution function was derived for a relativistic gas [34]. Thirty years later, the covariant formulation of the relativistic Boltzmann equation was proposed in [39] to describe the statistical behavior of a thermodynamic system not in thermodynamic equilibrium. The transport coefficients were determined from the Boltzmann equation by using the Chapman–Enskog methodology in [29]. Different from a non-relativistic monatomic gas, a relativistic gas has a bulk viscosity. It has called the attention of many researchers to a number of applications of this theory: the effect of neutrino viscosity on the evolution of the universe and the study of galaxy formation, neutron stars, and controlled thermonuclear fusion etc. The readers are referred to the monographs [11, 23] for more detailed descriptions.
The relativistic kinetic theory is attracting increasing attention in recent years, but it has been sparsely used to model phenomenological matter in comparison to fluid models. In the non-relativistic case, the kinetic theory has been studied intensively as a mathematical subject during several decades, and also played an important role from an engineering point of view, see e.g. [10, 12]. From the Boltzmann equation one could determine the distribution function hence the transport coefficients of gases, however this task was not so easy. Hilbert showed that an approximate solution of the integro-differential equation could be obtained from a power series expansion of a parameter (being proportional to the mean free path). Chapman and Enskog calculated independently the transport coefficients for gases whose molecules interacted according to any kind of spherically symmetric potential function. Another method proposed by Grad [21, 22] is to expand the distribution function in terms of tensorial Hermite polynomials and introduce the balance equations corresponding to higher order moments of the distribution function. The crucial ingredient of the Chapman–Enskog method is the assumption that in the hydrodynamic regime the distribution function can be expressed as a function of the hydrodynamic variables and their gradients. The Chapman–Enskog method has been extended to the relativistic cases, see e.g. [14, 19, 20, 24, 25]. Unfortunately, it is difficult to derive the equations of relativistic fluid dynamics from the kinetic theory [13]. The moment method can avoid such difficulty and is also generalized to the relativistic cases, see e.g. [1, 30,31,32, 37, 44]. However, the moment method cannot state the influence of the Knudsen number. Combining the Chapman–Enskog method with the moment method has been attempted [13, 33].
It is difficult to derive the relativistic moment system of higher order since the family of orthogonal polynomials can not be found easily. Several authors have tried to construct the family of orthogonal polynomials analogous to the Hermite polynomials, see e.g [2, 23]. Their application can be found in [13, 33, 45]. Unfortunately, there is no explicit expression of the moment systems if the order of the moment system is larger than 3. Moreover, the hyperbolicity of existing general moment systems is not proved, even for the second order moment system (e.g. the general Israel and Stewart system). For a special case with heat conduction and no viscosity, Hiscock and Lindblom proved that the Israel and Stewart moment system in the Landau frame was globally hyperbolic and linearly stable, but they also showed that the Israel and Stewart moment system in the Eckart frame was not globally hyperbolic and linearly stable. For the general case, they only proved that the Israel and Stewart moment system was hyperbolic near the equilibrium. The readers are referred to [24, 27, 28]. Following the approach used in [26, 27], it is easy to show that the above conclusion is not true if the viscosity exists, that is, the Israel and Stewart moment system in the Landau frame is not globally hyperbolic too if the viscosity exists. There does not exist any result on the hyperbolicity or loss of hyperbolicity of (existing) general higher-order moment systems for the relativistic kinetic equation. Such proof is very difficult and challenging. The loss of hyperbolicity may cause the solution blow-up when the distribution is far away from the equilibrium state. Even for the non-relativistic case, increasing the number of moments seems not to avoid such blow-up [9].
Up to now, there have been some latest progresses on the Grad moment method in the non-relativistic case. A regularization was presented in [5] for the 1D Grad moment system to achieve global hyperbolicity. It was based on the observation that the characteristic polynomial of the Jacobian of the flux in Grad’s moment system is independent of the intermediate moments, and further extended to the multi-dimensional case [6, 7]. The quadrature based projection methods were used to derive hyperbolic PDE systems for the solution of the Boltzmann equation [35, 36] by using some quadrature rule instead of the exact integration. In the 1D case, it is similar to the regularization in [5]. Those contributions led to well understanding the hyperbolicity of the Grad moment systems. Based on the operator projection, a general framework of model reduction technique was recently presented in [18]. It projected the time and space derivatives in the kinetic equation into a finite-dimensional weighted polynomial space synchronously, and might give most of the existing moment systems mentioned above. The aim of this paper is to extend the model reduction method by the operator projection [18] to the one-dimensional special relativistic Boltzmann equation and derive corresponding globally hyperbolic moment system of arbitrary order. The key is to choose the weight function and define the polynomial spaces and their basis as well as the projection operator. The theoretical foundations of our moment method are the properties of two families of the complicate Grad type orthogonal polynomials depending on a parameter.
The paper is organized as follows. Section 2 introduces the special relativistic Boltzmann equation and some macroscopic quantities defined via the kinetic theory. Section 3 gives two families of orthogonal polynomials dependent on a parameter, and studies their properties: recurrence relations, derivative relations with respect to the variable and the parameter, zeros, and the eigenvalues and eigenvectors of the recurrence matrices. Section 4 derives the moment system of the special relativistic Boltzmann equation and Sect. 5 studies its properties: the eigenvalues and its bound as well as eigenvectors, hyperbolicity, characteristic fields, linear stability, and Lorentz covariance. Section 6 presents a semi-implicit numerical scheme and conducts a numerical experiment to check the convergence of the proposed hyperbolic moment system. Section 7 concludes the paper. To make the main message of the paper less dilute, all proofs of theorems, lemmas and corollaries in Sects. 2–6 are given in the Appendices 1–5 respectively.
2 Preliminaries and Notations
In the special relativistic kinetic theory of gases [11], a microscopic gas particle of rest mass m is characterized by the \((D+1)\) space-time coordinates \((x^{\alpha })=(x^0,\mathbf {x})\) and momentum \((D+1)\)-vector \((p^{\alpha })=(p^{0},\mathbf {p})\), where \(x^0=ct\), c denotes the speed of light in vacuum, and t and \(\mathbf {x}\) are the time and D-dimensional spatial coordinates, respectively. Besides the contravariant notation (e.g. \(p^{\alpha }\)), the covariant notation such as \(p_{\alpha }\) will also be used in the following and the covariant \(p_{\alpha }\) is related to the contravariant \(p^{\alpha }\) by
where \((g^{\alpha \beta })\) denotes the Minkowski space-time metric tensor and is chosen as
\((g^{\alpha \beta })=\mathrm{diag}\{1,-\mathbf {I}_{D}\}\), \(\mathbf {I}_{D}\) is the \(D\times D\) identity matrix, \((g_{\alpha \beta })\) denotes the inverse of \((g^{\alpha \beta })\), and the Einstein summation convention over repeated indices is used. For a free relativistic particle, one has the relativistic energy-momentum relation (aka “on-shell” or “mass-shell” condition) \(E^2-\mathbf {p}^2 c^2=m^2 c^4\). If putting \(p^0= c^{-1}E=\sqrt{\mathbf {p}^2+m^2c^2}\), then the “mass-shell” condition can be rewritten as \(p^{\alpha }p_{\alpha }=m^2c^2\).
As in the non-relativistic case, the relativistic Boltzmann equation describes the evolution of the one-particle distribution function of an ideal gas in the phase space spanned by the particle space-time coordinates \((x^{\alpha })\) and momentum (D \(+\) 1)-vector \((p^{\alpha })\). The one-particle distribution function only depends on \((\mathbf {x},\mathbf {p}, t)\) and is defined in such a way that \(f(\mathbf {x}, \mathbf {p}, t) d^D\mathbf {x} d^D\mathbf {p}\) gives the number of particles at time t in the volume element \(d^D \mathbf {x} d^D\mathbf {p} \). For a single gas the Boltzmann equation reads [11]
where the collision term Q(f, f) depends on the product of the distribution functions of two particles at collision, e.g.
here f and \(f_*\) are the distributions depending on the momenta before a collision, while \(f'\) and \(f_*'\) depend on the momenta after the collision, \(d\Omega \) denotes the element of the solid angle, the collision kernel is given by \(B=\sigma \sqrt{(p_{*}^{\alpha }p_{\alpha })^{2}-m^2c^2}\) for a single non degenerate gas (e.g. electron gas), and \(\sigma \) denotes the differential cross section of collision. The collision term satisfies
so that 1 and \(p^{\alpha }\) are called collision invariants. Moreover, the Boltzmann equation (2.1) should satisfy the entropy dissipation relation (in the sense of classical statistics)
where the equal sign corresponds to the local thermodynamic equilibrium.
In kinetic theory the macroscopic description of gas can be represented by the first and second moments of the distribution function f, namely, the partial particle (D \(+\) 1)-flow \(N^\alpha \) and the partial energy-momentum tensor \(T^{\alpha \beta }\), which are defined by
They can be decomposed into the following forms (i.e. the Landau–Lifshitz decomposition)
where \((U^{\alpha })=\left( \gamma (\mathbf {u}) c, \gamma (\mathbf {u})\mathbf {u}\right) \) denotes the macroscopic velocity \((D+1)\)-vector of gas, \(\gamma (\mathbf {u})=(1-c^{-2}|\mathbf {u}|^{2})^{-\frac{1}{2}}\) is the Lorentz factor, \(\Delta ^{\alpha \beta }\) is defined by
which is a symmetric projector onto the D-dimensional subspace orthogonal to \(U^\alpha \), i.e. \(\Delta ^{\alpha \beta }U_{\beta }=0\). Here, the mass density \(\rho \), the particle-diffusion current \(n^{\alpha }\), the energy density \(\varepsilon \), the shear–stress tensor \(\pi ^{\alpha \beta }\), and the sum of thermodynamic pressure \(P_{0}\) and bulk viscous pressure \(\Pi \) are defined and related to the distribution f by
where \(E:=U_{\alpha }p^{\alpha }\) here and hereafter, \(p^{{\langle }\alpha {\rangle }}:=\Delta _{\beta }^{\alpha }p^{\beta }\), \(p^{{\langle }\alpha \beta {\rangle }}:=\Delta ^{\alpha \beta }_{\mu \nu }{p^{\mu }p^{\nu }}\), and
It is obvious to obtain
and easy to verify the identity
Multiplying the special relativistic Boltzmann equation (2.1) by 1 and \(p^{\alpha }\) respectively, integrating both sides over \(\mathbb {R}^{D}\) in terms of \(\mathbf {p}\), and using (2.2) gives the following conservation laws
Remark 1
It is common to choose \(U^\alpha \) as the velocity of either energy transport (the Landau–Lifshitz frame) [38])
i.e.
or particle transport (the Eckart frame [16], in which the velocity is specified by the flow of particles)
i.e.
The former can be applied to the multicomponent gas while the latter is only used for the single component gas. The present work will be done in the Landau–Lifshitz frame (2.11).
Remark 2
At the local thermodynamic equilibrium, \(n^\alpha \), \(\Pi \), and \(\pi ^{\alpha \beta }\) will be zero.
Remark 3
In order to simplify the collision term, several simple collision models have been proposed, see [11]. Similar to the BGK (Bhatnagar–Gross–Krook) model in the non-relativistic theory, two simple relativistic collision models are the Marle model [40]
and the Anderson–Witting model [3]
where \(f^{(0)}=f^{(0)}(\mathbf {x}, \mathbf {p}, t)\) denotes the distribution function at the local thermodynamic equilibrium, and \(\tau \) is the relaxation time and may rely on \(\rho \), \(\theta \).
In the non-relativistic limit, both (2.13) and (2.14) tend to the BGK model. However, the Marle model (2.13) does not satisfy the constraints of the collision terms in (2.2).
The relaxation time \(\tau \) can be defined by
where n denotes the particle number density, d denotes the diameter of gas particles, and \(\bar{g}\) is proportional to the mean relative speed \(\bar{\xi }\) between two particles, e.g. \(\bar{g}=\sqrt{2}\bar{\xi }\) or \(\bar{\xi }\) [11].
In the non-relativistic case, \(\bar{\xi }=4\sqrt{\frac{kT}{\pi m}}\), but the expression of \(\bar{\xi }\) in the relativistic case is very complicate, see Sect. 8.2 of the book [11]. Usually, \(\bar{\xi }\) or \(\bar{g}\) is suitably approximated, for example, \(\bar{g}\approx c\) (that is, \(\bar{g}\) is approximated by using the ultra-relativistic limit). Under such simple approximation, one has
This paper will only consider the one-dimensional form of relativistic Boltzmann equation (2.1). In this case, the vector notations \(\mathbf {x}\) and \(\mathbf {p}\) will be replaced with x or \(x^1\) and p or \(p^{1}\), respectively, the Greek indices \(\alpha \) and \(\beta \) run from 0 to 1, and (2.1) reduces to the following form
In the 1D case, the shear–stress tensor \(\pi ^{\alpha \beta }\) disappears even though the local-equilibrium is departed from, and the local-equilibrium distribution \(f^{(0)}\) can be explicitly given by
and obeys the common prescription that the mass density \(\rho \) and energy density \(\varepsilon \) are completely determined singly by the local-equilibrium distribution \(f^{(0)}\), that is,
The local-equilibrium distribution \(f^{(0)}\) in (2.16) is like the Maxwell-Jüttner distribution [11] for the case of \(D=3\) and Maxwell gas
In (2.16), \(\zeta ={(k_{B}T)^{-1}(mc^2)}\) is the ratio between the particle rest energy \(mc^2\) and the thermal energy of the gas \(k_BT\), \(k_B\) denotes the Boltzmann constant, T is the thermodynamic temperature, and \(K_{n}(\zeta )\) denotes the modified Bessel function of the second kind, defined by
satisfying the recurrence relation
For \(\zeta \gg 1\) the particles behave as non-relativistic, and for \(\zeta \ll 1\) they behave as ultra-relativistic.
Similar to (2.7), from the knowledge of the equilibrium distribution function \(f^{(0)}\), it is also possible to determine the other macroscopic variables such as
where \(G(\zeta ):=K_{1}^{-1}(\zeta )K_{2}(\zeta )\).
Now, the conservation laws (2.10) become
where \(h:=\rho ^{-1}(\varepsilon +P_{0})={c^2}G(\zeta )\) denotes the specific enthalpy. They are just the macroscopic equations of special relativistic hydrodynamics (RHD). In other words, when \(f=f^{(0)}\), the special relativistic Boltzmann equation (2.15) can lead to the RHD equations (2.21). We aim at finding the reduced model equations to describe states with \(f\ne f^{(0)}\). This paper will extend the moment method by operator projection [18] to (2.15) and derive its arbitrary order moment model in Sect. 4.
Before ending this section, we discuss the macroscopic variables calculated by a given distribution f, in other words, for the nonnegative distribution f(x, p, t), which is not identically zero, can the physically admissible macroscopic states \(\{\rho ,u,\theta ={\zeta }^{-1}\}\) satisfying \(\rho >0,|u|<{c}\) and \(\theta >0\) be obtained?
Theorem 2.1
For the nonnegative distribution f(x, p, t), which is not identically zero, the density current \(N^{\alpha }\) and energy-momentum tensor \(T^{\alpha \beta }\) calculated by (2.3) satisfy
where the macroscopic velocity u is the unique solution satisfying \(|u|<{c}\) of the quadratic equation
that is
satisfying \({|u|<c}\). And the positive mass density \(\rho \) is calculated by
Furthermore, the equation
has a unique positive solution \(\theta \) in the interval \((0,+\infty )\).
Furthermore, the following conclusion holds.
Theorem 2.2
Under the assumptions of Theorem 2.1, the bulk viscous pressure \(\Pi \) satisfies
Remark 4
The proofs of those theorems are given in the Appendix 1. Theorem 2.1 provides a recovery procedure of the admissible primitive variables \(\rho , u\), and \(\theta \) from the nonnegative distribution f(x, p, t) or the given density current \(N^{\alpha }\) and energy-momentum tensor \(T^{\alpha \beta }\) satisfying (2.22).
It is useful in the derivation of the moment system as well as the numerical scheme.
Remark 5
The assumption on positivity of f(x, p, t) is physical and sufficient for three constraints in Theorem 2.1. Generally, the moment expansion cannot preserve the positivity of f(x; p; t). However, one is only interested in the (macroscopic) moments and not in the particular value of f. Using the moments calculated by a Grad expansion, physically relevant information can be obtained even though the distribution function may become negative.
Before discussing the moment method, we first non-dimensionalize the relativistic Boltzmann equation (2.15). Here we only consider the Anderson–Witting model (2.14). If setting
where L denotes the macroscopic characteristic length, \(n_{0}\) and \(\theta _{0}=m c^2/k_{B}\) are the reference particle number and temperature, respectively, then the 1D relativistic Boltzmann equation (2.15) with (2.14) is non-dimensionalized as follows
or
Thanks to \(K_{n}=\frac{\lambda }{L}=\frac{\tau _{0}c}{L}=\frac{1}{n_{0}L\pi d^2}\), the above equation is rewritten as
Thus, if \(\tilde{\tau }:=\frac{K_{n}}{\hat{\rho }}\) is considered as a new “relaxation time”, then the collision term of relativistic Boltzmann equation (2.27) has the same form of non-relativistic BGK model. For the sake of convenience, in the following, we still use \(\tau \), x, t, f, p, \(p^{0}\), \(\rho \) to replace \(\tilde{\tau }\), \(\hat{x}\), \(\hat{t}\), \(\hat{f}\), \(\hat{p}\), \(\hat{p}^{0}\), \(\hat{\rho }\), respectively.
3 Two Families of Orthogonal Polynomials
This section introduces two families of orthogonal polynomials dependent on a parameter \(\zeta \) and their properties which will be used in deriving and discussing of our moment system. These polynomials are similar to those given in [2]. All proofs are given in the Appendix 2.
If considering
as the weight functions in the interval \([1,+\infty )\), where \(\zeta \in \mathbb {R}^{+}\) denotes a parameter, then the inner products with respect to \(\omega ^{(\ell )}(x;\zeta )\) can be introduced as follows
where \(L^{2}_{\omega ^{(\ell )}}[1,+\infty ):=\left\{ f\big |\int _{1}^{+\infty }f(x)^2\omega ^{(\ell )}(x;\zeta )dx<+\infty \right\} \). It is worth noting that the choice of the weight function \(\omega ^{(\ell )}(x;\zeta )\) is dependent on the equilibrium distribution \(f^{(0)}(x,p, t)\) in (2.16).
Let \(\{P_{n}^{(\ell )}(x;\zeta )\}\), \(\ell =0,1\), be two families of standard orthogonal polynomials with respect to the weight function \(\omega ^{(\ell )}(x;\zeta )\) in the interval \([1,+\infty )\), i.e.
where \(\delta _{m,n}\) denotes the Kronecker delta function, which is equal to 1 if \(m=n\), and 0 otherwise. Obviously, \(\{P_{n}^{(\ell )}(x;\zeta )\}\) satisfies
and
for any polynomial \(Q(x;\zeta )\) of degree \(\le n\) in \(L^{2}_{\omega ^{(\ell )}}[1,+\infty )\).
The orthogonal polynomials \(\{P_{n}^{(\ell )}(x;\zeta )\}\) can be obtained by using the Gram-Schmidt process. For example, several orthogonal polynomials of lower degree are given as follows
and plotted in Fig. 1 with respect to x and \(\zeta \). It shows that the coefficients in those orthogonal polynomials are so irregular that it will be quite complicate to study the properties of \(\{P_{n}^{(\ell )}(x;\zeta )\}\). Let \(c_{n}^{(\ell )}\) be the leading coefficient of \(P_{n}^{(\ell )}(x;\zeta )\), \(\ell =0,1\). Without loss of generality, assume \(c_{n}^{(\ell )}>0\), \(\ell =0,1\). Due to the important result on the zeros of orthogonal polynomials [43, Theorem 3.2], the polynomial \(P_{n}^{(\ell )}(x;\zeta )\) has exactly n real simple zeros in the interval \((1,+\infty )\), \(\ell =0,1\). Thus if those zeros are denoted by \(\{x_{i,n}^{(\ell )}\}_{i=1}^{n}\) in an increasing order, then the polynomial \(P_{n}^{(\ell )}(x;\zeta )\) can be rewritten as follows

The polynomials \(P_{n}^{(\ell )}(x,\zeta )\) given in (3.4)
In the following, we will derive the recurrence relations of \(\{P_{n}^{(\ell )}(x;\zeta )\}\), calculate their derivatives with respect to x and \(\zeta \), respectively, and study the properties of zeros and coefficient matrices in the recurrence relations.
3.1 Recurrence Relations
This section presents the recurrence relations for the orthogonal polynomials \(\{P_{n}^{(\ell )}(x;\zeta )\}\), \(\ell =0,1\), the recurrence relations between \(\{P_{n}^{(0)}(x;\zeta )\}\) and \(\{P_{n}^{(1)}(x;\zeta )\}\), and the specific forms of the coefficients in those recurrence relations.
Using the three-term recurrence relation and the existence theorem of zeros of general orthogonal polynomials in Theorems 3.1 and 3.2 of [43] gives the following conclusion.
Theorem 3.1
For \(\ell =0,1\), a three-term recurrence relation for the orthogonal polynomials \(\{P_{n}^{(\ell )}(x;\zeta )\}\) can be given by
or in the matrix-vector form
where both coefficients
are positive, \(\mathbf {e}_{n+1}\) is the last column of the identity matrix of order \((n+1)\), and
which is a symmetric positive definite tridiagonal matrix with the spectral radius larger than 1.
Besides those, the recurrence relations between \(\{P_{n}^{(0)}(x;\zeta )\}\) and \(\{P_{n}^{(1)}(x;\zeta )\}\) can also be obtained.
Theorem 3.2
-
(i)
Two three-term recurrence relations between \(\{P_{n}^{(0)}(x;\zeta )\}\) and \(\{P_{n}^{(1)}(x;\zeta )\}\) can be given by
$$\begin{aligned}&(x^2-1)P_{n}^{(1)}=p_{n}P_{n}^{(0)}+q_{n}P_{n+1}^{(0)}+r_{n+1}P_{n+2}^{(0)},\end{aligned}$$(3.9)$$\begin{aligned}&P_{n+1}^{(0)}=r_{n}P_{n-1}^{(1)}+q_{n}P_{n}^{(1)}+p_{n+1}P_{n+1}^{(1)}, \end{aligned}$$(3.10)or in the matrix-vector form
$$\begin{aligned} \mathbf {P}_{n+1}^{(0)}&=\mathbf {J}_{n}^{T}\mathbf {P}_{n}^{(1)}+p_{n+1}P_{n+1}^{(1)}\mathbf {e}_{n+2},\end{aligned}$$(3.11)$$\begin{aligned} (x^2-1)\mathbf {P}_{n}^{(1)}&=\mathbf {J}_{n}\mathbf {P}_{n+1}^{(0)}+r_{n+1}P_{n+2}^{(0)}\mathbf {e}_{n+1}, \end{aligned}$$(3.12)where
 (3.13)
(3.13)and
$$\begin{aligned} \mathbf {J}_{n}:=\begin{pmatrix} p_{0} &{}\quad q_{0} &{}\quad r_{1} &{}\quad 0 &{}\quad 0 &{}\quad \cdots &{}\quad 0\\ 0 &{}\quad p_{1} &{}\quad q_{1} &{}\quad r_{2} &{}\quad 0 &{}\quad \cdots &{}\quad 0\\ \ &{}\quad \ddots &{}\quad \ddots &{}\quad \ddots &{}\quad \ &{}\quad \ &{}\quad \ \\ \ &{}\quad \ &{}\quad \ &{}\quad \ &{}\quad 0 &{}\quad p_{n} &{}\quad q_{n} \end{pmatrix} \in {\mathbb R}^{(n+1)\times (n+2)}. \end{aligned}$$ -
(ii)
Two two-term recurrence relations between \(\{P_{n}^{(0)}(x;\zeta )\}\) and \(\{P_{n}^{(1)}(x;\zeta )\}\) can be derived as follows
$$\begin{aligned}&(x^2-1)P_{n}^{(1)}=\tilde{p}_{n}(x+\tilde{q}_{n})P_{n+1}^{(0)}+\tilde{r}_{n}P_{n}^{(0)}, \end{aligned}$$(3.14)$$\begin{aligned}&P_{n+1}^{(0)}=\frac{1}{\tilde{p}_{n}}(x-\tilde{q}_{n})P_{n}^{(1)}-\frac{a_{n-1}^{(1)}}{a_{n}^{(0)}}\tilde{r}_{n}P_{n-1}^{(1)}, \end{aligned}$$(3.15)where
$$\begin{aligned} \tilde{p}_{n}:=\frac{c_{n}^{(1)}}{c_{n+1}^{(0)}},\quad \tilde{q}_{n}:=\sum _{i=1}^{n+1}x_{i,n+1}^{(0)}-\sum _{i=1}^{n}x_{i,n}^{(1)}, \quad \tilde{r}_{n}:={p_{n}(1-\tilde{p}_{n}^{2})}. \end{aligned}$$(3.16)

3.2 Partial Derivatives
This section calculates the derivatives of the polynomial \(P_{n}^{(\ell )} (x;\zeta )\) with respect to x and \(\zeta \), \(\ell =0,1\).
Theorem 3.3
For \(\ell =0,1\), the first-order derivative of the polynomial \(P_{n+1}^{(\ell )} (x;\zeta )\) with respect to the parameter \(\zeta \) satisfies
Theorem 3.4
The first-order derivatives of the polynomials \(\{P_{n}^{(\ell )} (x;\zeta )\}\) with respect to the variable x satisfy
3.3 Zeros
Using the separation theorem of zeros of general orthogonal polynomials [43] gives the following conclusion on our orthogonal polynomials \(\{P_{n}^{(\ell )}(x;\zeta )\}\).
Theorem 3.5
For \(\ell =0,1\), the zeros \(\{x_{i,n}^{(\ell )}\}_{i=1}^{n}\) of \(P_{n}^{(\ell )}(x;\zeta )\) and \(\{x_{i,n+1}^{(\ell )}\}_{i=1}^{n+1}\) of \(P_{n+1}^{(\ell )}(x;\zeta )\) satisfy the separation property
There is still another important separation property for the zeros of the orthogonal polynomials \(\{P_{n}^{(\ell )}(x;\zeta ), \ell =0,1\}\).
Theorem 3.6
The n zeros \(\{x_{i,n}^{(1)}\}_{i=1}^{n}\) of \(P_{n}^{(1)}\) and \(n+1\) zeros of \(\{x_{i,n+1}^{(0)}\}_{i=1}^{n+1}\) of \(P_{n+1}^{(0)}\) satisfy
According to Theorems 3.5 and 3.6, we can know the sign of the coefficients of the recurrence relations in Theorem 3.2.
Corollary 1
All quantities \(p_n, q_n, r_n\) in (3.13) and \(\tilde{p}_n, \tilde{q}_n, \tilde{r}_n\) in (3.16) are positive.
Using Corollary 1, \(\tilde{r}_{n}={p_{n}(1-\tilde{p}_{n}^{2})}\), and \(\tilde{p}_{n}=(c_{n+1}^{(0)})^{-1}c_{n}^{(1)}\) gives the following corollary.
Corollary 2
The leading coefficient of \(P_{n+1}^{(0)}\) is larger than that of \(P_{n}^{(1)}\), i.e. \(c_{n+1}^{(0)}>c_{n}^{(1)}\).
According to Theorems 3.3 and 3.5, the following conclusion holds.
Corollary 3
The zeros \(\{x_{i,n}^{(\ell )}\}_{i=1}^{n}\) of \(P_{n}^{(\ell )}\) strictly decrease with respect to \(\zeta \), i.e.
3.4 Generalized Eigenvalues and Eigenvectors of Coefficient Matrices in the Recurrence Relations
This section discusses the generalized eigenvalues and eigenvectors of two \((2n+1)\times (2n+1)\) matrices \(\mathbf {A}^{0}_{n}\) and \(\mathbf {A}^{1}_{n}\), defined by
where \(\mathbf {J}_{n}^{(0)}\), \(\mathbf {J}_{n}^{(1)}\), and \(\mathbf {J}_{n}\) appear in the recurrence relations in Theorems 3.1 and 3.2.
Consider the following generalized eigenvalue problem (2nd sense): Find a vector \(\mathbf {y}\) that obeys \( \mathbf {A}^{1}_{n} \mathbf {y}= \hat{\lambda } \mathbf {A}^{0}_{n} \mathbf {y}\). If let \(\mathbf {u}\) denote the first \(n+1\) rows of \(\mathbf {y}\), and \(\mathbf {v}\) be the last n rows of \(\mathbf {y}\), then one has
Multiplying (3.7), (3.11), and (3.12) by \(P_{n}^{(1)}(-x;\zeta )\) with \(|x|>1\) gives
If substituting (3.22) and (3.23) into (3.24) and(3.25) respectively, then one obtains
Transforming (3.26) and (3.27) by x to \(-x\) and then adding them into (3.26) and (3.27) respectively gives
for \(|x|> 1\), where
and
It is not difficult to find that if the second terms at the right-hand sides of (3.28) and (3.29) disappear, then (3.28) and (3.29) reduce to two equations in (3.21). Thus in order to obtain the generalized eigenvalues and eigenvectors of \(\mathbf {A}_{n}^{0}\) and \(\mathbf {A}_{n}^{1}\), one has to study the zeros of \(Q_{2n}(x;\zeta )\).
Lemma 1
The function \(Q_{2n}(x;\zeta )\) is an even polynomial of degree 2n and has 2n real simple zeros \(\{z_{i,n}, i=\pm 1,\ldots ,\pm n\}\), which satisfy \(z_{-i,n}=-z_{i,n}\) and \(z_{i,n}\in (1,+\infty )\) for \(i=1,\ldots ,n\).
The polynomials \(Q_{10}(x;\zeta )\), \(P^{(0)}_{5}(x;\zeta )\), \(P^{(0)}_{6}(x;\zeta )\), \(P^{(1)}_{4}(x;\zeta )\), and \(P^{(1)}_{5}(x;\zeta )\) with \(\zeta =1\) are plotted in Fig. 2, where the relation between their zeros can be clearly observed.

Plots of the polynomials \(Q_{10}(x;\zeta )\), \(P^{(0)}_{5}(x;\zeta )\), \(P^{(0)}_{6}(x;\zeta )\), \(P^{(1)}_{4}(x;\zeta )\), and \(P^{(1)}_{5}(x;\zeta )\) with \(\zeta =1\)
With the aid of Theorems 3.3 and 3.4, we can calculate the partial derivatives at \(z_{i,n}\) of \(Q_{2n}(x;\zeta )\) with respect to x and \(\zeta \).
Lemma 2
At the positive zeros \(\{z_{i,n}\}_{i=1}^{n}\), the partial derivatives of \(Q_{2n}(x;\zeta )\) satisfy
Moreover, one has
Similar to Corollary 3, the following conclusion holds.
Lemma 3
The zeros \(\{z_{i,n}, i=\pm 1,\ldots ,\pm {n}\}\) of \(Q_{2n}(x;\zeta )\) satisfy
Thanks to Lemmas 1 and 3, the generalized eigenvalues and eigenvectors of two
\((2n+1)\times (2n+1)\) matrices \(\mathbf {A}^{0}_{n}\) and \(\mathbf {A}^{1}_{n}\) can be obtained with the aid of the zeros of \(Q_{2n}(x;\zeta )\).
Theorem 3.7
Besides a zero generalized eigenvalue denoted by \(\hat{\lambda } _{0,n}\), the matrix pair \(\mathbf {A}^{0}_{n}\) and \(\mathbf {A}^{1}_{n}\) has 2n non-zero, real and simple generalized eigenvalues, which satisfy
and
Corresponding \((2n+1)\) generalized eigenvectors can be expressed as
with
for \(i=\pm 1,\ldots ,\pm n\), and
4 Moment Method by Operator Projection
This section begins to extend the moment method by operator projection [18] to the one-dimensional relativistic Boltzmann equation (2.15) and derive its arbitrary order hyperbolic moment model. Without loss of generality, units in which both the speed of light c and rest mass m of particle are equal to one will be used in the following. All proofs are given in the Appendix 3.
4.1 Weighted Polynomial Space
In order to use the moment method by the operator projection to derive the hyperbolic moment model of the kinetic equation, we should define the weighted polynomial spaces and norms as well as the projection operator. Thanks to the equilibrium distribution \(f^{(0)} \) in (2.16), the weight function is chosen as \(g^{(0)}\), which will be replaced with the new notation \(g^{(0)}_{[u,\theta ]}\) by considering the dependence of \(g^{(0)}\) on the macroscopic fluid velocity u and \(\theta =k_BT/m=\zeta ^{-1}\), that is
Associated with the weight function \(g^{(0)}_{[u,\theta ]}\), our weighted polynomial space is defined by
which is an infinite-dimensional linear space equipped with the inner product
Similarly, for a finite positive integer \(M\in \mathbb {N}\), a finite-dimensional weighted polynomial space can be defined by
which is a closed subspace of \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}\) obviously.
Thanks to Theorem 2.2, for all physically admissible u and \(\theta \) satisfying \(|u|<1\) and \(\theta >0\),
we introduce two notations
where \(\tilde{P}_{k}^{(0)}[u,\theta ]=g^{(0)}_{[u,\theta ]}P_{k}^{(0)}\) and \( \tilde{P}_{k}^{(1)}[u,\theta ]= g^{(0)}_{[u,\theta ]}(U^{0})^{-1}P_{k}^{(1)}p_{{\langle }1{\rangle }}\).
Lemma 4
The set of all components of \(\mathbf {\mathcal {P}}_{\infty }[u,\theta ]\) (resp. \(\mathbf {\mathcal {P}}_{M}[u,\theta ]\)) form a standard orthogonal basis of \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}\) (resp. \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\)).
Remark 6
In the non-relativistic limit, \(E=U_\alpha p^\alpha \), \(p_{{\langle }1{\rangle }}\) and \(g^{(0)}_{[u,\theta ]}\) reduce to \(p^2\), \(-p\) and \( \frac{1}{\sqrt{2\pi \theta }}\exp (-\frac{p^2}{\theta })\), respectively, thus the basis becomes the generalized Hermite polynomial [5].
Since \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\) is a subspace of \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{N}\) when \( M<N<+\infty \), there exists a matrix
\(\mathbf {P}_{M,N}\in \mathbb {R}^{(2M+1)\times (2N+1)}\) with full row rank such that \(\mathbf {\mathcal {P}}_{M}[u,\theta ]=\mathbf {P}_{M,N}\mathbf {\mathcal {P}}_{N}[u,\theta ]\), where
Using the properties of the orthogonal polynomials \(\{P_{n}^{(\ell )}(x;\zeta ), \ell =0,1, n\ge 0\}\) in Sect. 3 can further calculate the partial derivatives and give the recurrence relations of the basis functions \( \{\tilde{P}_{n}^{(0)}[u,\theta ], n\ge 0\}\) and \(\{\tilde{P}_{n-1}^{(1)}[u,\theta ], n\ge 1\}\).
Lemma 5
(Derivative relations) The partial derivatives of basis functions
\( \{\tilde{P}_{n}^{(0)}[u,\theta ], n\ge 0\}\) and \(\{\tilde{P}_{n-1}^{(1)}[u,\theta ], n\ge 1\}\) can be calculated by
for \(s=t\) and x. It indicates that \(\frac{\partial \tilde{P}_{M}^{(0)}}{\partial s}\) and \(\frac{\partial \tilde{P}_{M-1}^{(0)}}{\partial s}\) \(\in \mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M+1}\).
Lemma 6
(Recurrence relations) The basis functions
\(\{\tilde{P}_{n}^{(0)}[u,\theta ], n\ge 0\}\) and \(\{\tilde{P}_{n-1}^{(1)}[u,\theta ]\), \(n\ge 1\}\) satisfy the following recurrence relations
where \(\mathbf {e}_{2M+1}^{1}\) and \(\mathbf {e}_{2M+1}^{2}\) are the penultimate and the last column of the identity matrix of order \((2M+1)\), respectively, and
in which \(\mathbf {P}_{M}^{p}\) is a permutation matrix making
with
For a finite integer \(M\ge 1\), define an operator \(\Pi _{M}[u,\theta ]: \mathbb {H}^{g^{(0)}_{[u,\theta ]}}\rightarrow \mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\) by
or in a compact form
where
and the symbol \([\cdot ,\cdot ]_{M}\) denotes the common inner product of two \((2M+1)\)-dimensional vectors.
Lemma 7
The operator \(\Pi _{M}[u,\theta ]\) is a linear and bounded projection operator in sense that
-
(i)
\(\Pi _{M}[u,\theta ]f \in \mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\) for all \(f\in \mathbb {H}^{g^{(0)}_{[u,\theta ]}}\),
-
(ii)
\(\Pi _{M}[u,\theta ]f=f\) for all \(f\in \mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\).
Remark 7
The so-called Grad type expansion is to expand the distribution function f(x, p, t) in the weighted polynomial space \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}\) as follows
where the symbol \([\cdot ,\cdot ]_{\infty }\) denotes the common inner product of two infinite-dimensional vectors, and \(\mathbf {f}_{\infty }=(f_{0}^{0},f_{1}^{0},f_{0}^{1},\ldots ,f_{M}^{0},f_{M-1}^{1}, \ldots )^{T}\).
4.2 Derivation of the Moment Model
Based on the weighted polynomial spaces \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}\) and \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_M\) in Sect. 4.1 and the projection operator \(\Pi _{M}[u,\theta ]\) defined in (4.7), the moment method by the operator projection [18] can be implemented for the 1D special relativistic Boltzmann equation (2.15). In view of the fact that the variables \(\{\rho , u, \theta , \Pi , {n}^{1}\}\) are several physical quantities of practical interest and the first three are required in calculating the equilibrium distribution \(f^{(0)}\).
The \((2M+1)\)-dimensional vector
will be considered as the dependent variable vector, instead of \(\mathbf {f}_{M}\) defined in (4.10), where \(\tilde{n}^{1}:=n^{1}\sqrt{1-u^2}\). The relations between \(\mathbf {W_{M}}\) and \(\mathbf {f_{M}}\) is
where the square matrix \(\mathbf {D}_M^{\mathbf {W}}\) depends on \(\theta \) and is of the following explicit form
and \(\mathbf {D}_{M}^{W}=\mathrm{diag}\{\mathbf {D}_{2}^{W},\mathbf {I}_{2M-4}\}\) for \(M\ge 3\), which is derived from (2.7), (2.12) and (2.17).

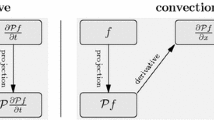
Schematic diagram of the moment method by the operator projection for the 1D special relativistic Boltzmann equation
Referring to the schematic diagram shown in Fig. 3, the arbitrary order moment system for the Boltzmann equation (2.15) can be derived by the operator projection as follows:
Step 1 (Projection 1) Projecting the distribution function f into the space \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\) by the operator \( \Pi _{M}[u,\theta ]\) defined in (4.8).
Step 2 Calculating the partial derivatives in time and space provides
for \(s=t\) and x, where \(\mathbf {C}_{M+1}\) is a square matrix of order \((2M+3)\) and directly derived with the aid of the derivative relations of the basis functions in Lemma 5.
Step 3 (Projection 2) Projecting the partial derivatives in (4.12) into the space \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\) gives
where the \((2M+1)\)-by-\((2M+1)\) matrix \(\mathbf {D}_{M}\) can be obtained from \(\mathbf {C}_{M}\) and \(\mathbf {D}_{M}^{\mathbf {W}}\) and is of the following form
and
where the elements “\(*\)” of \(\mathbf {D}_M\) in (4.14) are explicitly given by
Step 4 Multiplying (4.13) by the particle velocity \((p^\alpha )\) yields
Step 5 (Projection 3) Projecting (4.15) and (4.16) into the space \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\) gives
Step 6 Substituting them into the 1D special relativistic Boltzmann equation (2.15) derives the abstract form of the moment system
and then matching the coefficients in front of the basis functions \(\{ \tilde{P}_{k}^{(\ell )}[u,\theta ]\}\) leads to an “explicit” matrix-vector form of the moment system
which consists of \((2M+1)\) equations, where \( \mathbf {B}_{M}^{0}=\mathbf {M}^{t}_{M}\mathbf {D}_{M}\) and \(\mathbf {B}_{M}^{1}=\mathbf {M}^{x}_{M}\mathbf {D}_{M}\). For a general collision term Q(f, f), it is difficult to obtain an explicit expression of the source term \(\mathbf {S}(\mathbf {W}_{M})\) in (4.20). For the Anderson–Witting model (2.14), the right-hand side of (4.19) becomes
which implies that the source term \(\mathbf {S}(\mathbf {W}_{M})\) can be explicitly given by
where \(\mathbf {f}^{(0)}_{M}=\left( \rho \sqrt{G(\zeta )-{2}\zeta ^{-1}},0,\ldots ,0\right) ^{T}\), and the matrix \(\tilde{\mathbf {D}}_{M}^{W}\) is the same as \(\mathbf {D}_{M}^{W}\) except for the zero component of the upper left corner. It is worth noting that the first three components of \(\mathbf {S}(\mathbf {W}_{M})\) are zero due to (2.12) and (2.17).
Remark 8
With aid of the explicit forms of \(\mathbf {D}_{1}^{W}\), \(\mathbf {D}_{1}\), \(\mathbf {D}_{2}^{W}\), and \(\mathbf {D}_{2}\), the explicit form of the moment equations with \(M=1\) or 2 are very easily given. For example, when \(M=1\), the moment system is written as follows
where
It is shown that those equations become the macroscopic RHD equations (2.21) by multiplying those equations by \(({\mathbf {B}}_{1}^{0})^{-1}\).
Remark 9
With aid of the “projection operator”, the standard Grad moment method can be conveniently derived and easily understood. For example, the derivation of Grad moment system by using truncation can be simply and clearly described as follows
which is non-hyperbolic, while our moment system (4.19) is proved to be globally hyperbolic in the next section. By comparing (4.22) to (4.19), the difference between them is easily found, and becomes crucial to make the moment system hyperbolic [18].
Remark 10
Similar to those in [5], our moment system is also non-conservative because the projection is still operated outside the differential operators \(\frac{\partial }{\partial t}\) and \(\frac{\partial }{\partial x}\).
5 Properties of the Moment System
This section studies some mathematical and physical properties of moment system (4.19) or (4.20). All proofs are given in the Appendix 4.
5.1 Hyperbolicity, Eigenvalues, and Eigenvectors
In order to prove the hyperbolicity of the moment system (4.20), one has to verify that \(\mathbf {B}_{M}^{0}\) is invertible and \(\mathbf {B}_{M}:=(\mathbf {B}_{M}^{0})^{-1}\mathbf {B}_{M}^{1}\) is real diagonalizable. In the following, we always assume that the first three components of \(\mathbf {W}_{M}\) satisfy \(\rho >0\), \(|u|<1\), and \(\theta >0\).
Lemma 8
If the macroscopic variables satisfy \(\rho >0\), \(|u|<1\), \(\theta >0\) and \(\Pi >-\rho \theta \), then the matrix \(\mathbf {D}_{M}\) is invertible for \(M\ge 1\).
Theorem 5.1
(Eigenvalues and eigenvectors) The \((2M+1)\) eigenvalues of the moment system (4.20) are given by
satisfying \(|\lambda _{i,M}|<1\), and corresponding eigenvectors are
where \( \hat{\lambda } _{i,M}\) and \(\mathbf {y}_{i,M}\) are given in Theorem 3.7.
Lemma 9
Both real matrices \(U^{0}\mathbf {M}_{M}^{t}-U^{1}\mathbf {M}_{M}^{x}\) and \(\mathbf {M}_{M}^{t}\) are positive definite.
Theorem 5.2
(Hyperbolicity) The moment system (4.20) is strictly hyperbolic, and the spectral radius of \(\mathbf {B}_{M}\) is less than one.
5.2 Characteristic Fields
This section further discusses whether there exists the genuinely nonlinear or linearly degenerate characteristic field of the quasilinear moment system.
Theorem 5.3
For the moment system (4.20), \(\lambda _{0,M}\)-characteristic field is linearly degenerate, i.e.
Remark 11
With the aid of numerical experiments, we can conclude that for the moment system (4.20) with \(M\ge 4\), there exist at least two characteristic fields, which are neither linearly degenerate nor genuinely nonlinear, see Appendix “Explaination of Remark 11” section for more explanation.
5.3 Linear Stability
It is obvious that the moment system (4.20)-(4.21) has the local equilibrium solution \(\mathbf {W}_{M}^{(0)}=(\rho _{0},u_{0},\theta _{0},0,\ldots ,0)^{T}\), where \(\rho _{0}\), \(u_{0}\), and \(\theta _{0}\) are constant and satisfy \(\rho _{0}>0\), \(|u_{0}|<1\), and \(\theta _{0}>0\). Similar to the non-relativistic case [15], let us linearize the moment system (4.20)–(4.21) at \(\mathbf {W}_{M}^{(0)}\). If assuming that \(\mathbf {W}_{M}=\mathbf {W}_{M}^{(0)}(1+\mathbf {\bar{W}}_{M})\) and each component of \(\mathbf {\bar{W}}_{M}\) is small, then the linearized moment system is
where
Following [15], \(\bar{\mathbf {W}}_{M}\) is assumed to be
where i is the imaginary unit, \(\tilde{\mathbf {W}}_{M}\) is the nonzero amplitude, and \(\omega \) and k denote the frequency and wave number, respectively. Substituting the above plane waves into (5.3) gives
Because the amplitude \(\tilde{\mathbf {W}}_{M}\) is nonzero, the above coefficient matrix is singular, i.e.
which implies the dispersion relation between \(\omega \) and k.
The following linear stability result holds for the moment system (4.20)–(4.21).
Theorem 5.4
The moment system (4.20) with the source term (4.21) is linearly stable in space and time at the local equilibrium, that is, the linearized moment system (5.3) is stable in time and space, i.e. \(Im(\omega (k))\ge 0\) for each \(k\in \mathbb {R}\) and \(Re(k(\omega ))Im(k(\omega ))\le 0\) for each \(\omega \in \mathbb {R}^{+}\), respectively.
5.4 Lorentz Covariance
In physics, the Lorentz covariance is a key property of space-time following from the special theory of relativity, see e.g. [17]. This section studies the Lorentz covariance of the moment system (4.20). Besides the truncations or projection of distribution function, there are the truncations or projections of equation in the current moment method. It is nontrivial to know which parts of the expansion of the equation we have removed in the truncation or projection procedure, and whether they are Lorentz invariant or not.
Some Lorentz covariant quantities are first pointed out below.
Lemma 10
-
(i)
Each component of \(\mathbf {D}_{M}^{u} d\mathbf {W}_{M}\) is Lorentz invariant, where \(\mathbf {D}_{M}^{u}:=\mathrm{diag}\{1,(1-u^2)^{-1},1,\ldots ,{1}\}\), and \(d\mathbf {W}_{M}\) denotes the total differential of \(\mathbf {W}_{M}\).
-
(ii)
The matrices \(\mathbf {A}_{M}^{0}\), \(\mathbf {A}_{M}^{1}\) and the source term \(\mathbf {S}(\mathbf {W}_{M})\) defined in (4.21) are Lorentz invariant.
Theorem 5.5
(Lorentz covariance) The moment system (4.20) with the source term (4.21) is Lorentz covariant.
6 Numerical Experiment
This section conducts a numerical experiment to check the behavior of our hyperbolic moment equations (HME) (4.19) or (4.20) with (4.21) by solving the Cauchy problem with initial data
where \(\mathbf {W}_{M}^{L}=(7,0,1,0,\ldots ,0)^{T}\) and \(\mathbf {W}_{M}^{R}=(1,0,1,0,\ldots ,0)^{T}\). It is similar to the problem for the moment system of the non-relativistic BGK equation used in [5].
6.1 Numerical Scheme
The spatial grid \(\{x_i, i\in \mathbb Z\}\) considered here is uniform so that the stepsize \(\Delta x=x_{i+1}-x_{i}\) is constant. Thanks to Theorem 5.1, the grid in t-direction \(\{t_{n+1}=t_n+\Delta t, n\in \mathbb N\}\) can be given with the stepsize \(\Delta t=C_{\mathrm{CFL}} \Delta x\), where \(C_{\mathrm{CFL}} \) denotes the CFL (Courant-Friedrichs-Lewy) number. Use \(f_i^n\) and \(\rho _i^n\) to denote the approximations of \(f(x_i, p, t_n)\) and \(\rho (x_i,t_n)\) respectively. For the purpose of checking the behavior of our hyperbolic moment system, similar to [8], we only consider a first-order accurate semi-implicit operator-splitting type numerical scheme for the non-conservative system (4.19) or (4.20), which is formed into the convection and collision steps:
and
where \((\Pi f)_{i}^{n}:=\Pi _{M}[u_{i}^{n},\theta _{i}^{n}]f_{i}^{n}\) and the “numerical fluxes” \((\Pi F^{-})_{i+\frac{1}{2}}^{n}\) and \((\Pi F^{+})_{i-\frac{1}{2}}^{n}\) are derived based on the nonconservative version of the HLL (Harten-Lax-van Leer) scheme [42] and given by
and
Here \(\lambda _{i\pm \frac{1}{2}}^{L}=\min \{\lambda _{i}^{\min },\lambda _{i\pm 1}^{\min }\}\) and \(\lambda _{i\pm \frac{1}{2}}^{R}=\max \{\lambda _{i}^{\max },\lambda _{i\pm 1}^{\max }\}\), \(\lambda _{i}^{\min }\) and \(\lambda _{i}^{\max }\) denote the minimum and maximum eigenvalues of the moment system (4.20) at the grid point \(x_{i}\) respectively, see Theorem 5.1. In Eq. (6.3), the subscript \(f\rightarrow f^{(0)}\) denotes the transformation from f to \(f^{(0)}\) defined by \( \Pi _{f\rightarrow f^{(0)}}[u_{i}^{*},\theta _{i}^{*}](\Pi f)_{i}^{*}=f_{i}^{(0)*} \) or \( \mathbf {f}_{i,M}^{(0)*}=\mathbf {D}_{M}^{f_{i}^{(0)}}\mathbf {f}_{i,M}^{*}\), where
whose nonzero components are only in the first row and the component in the upper left corner is one.
The above scheme (6.2) and (6.3) is implemented as follows:
-
(i)
Perform the convection step (6.2) to obtain \(\Pi _{M}[u_{i}^{n},\theta _{i}^{n}]\left( p^{0}\Pi _{M}[u_{i}^{n},\theta _{i}^{n}](\Pi f)_{i}^{*}\right) \), and then obtain \(\Pi _{M}[u^{n}_i,\theta ^{n}_i](\Pi f)_{i}^{*}\).
-
(ii)
Calculate \(u^{*}_i\) and \(\theta ^{*}_i\) by solving (2.24) and (2.26), and then give \((\Pi f)_{i}^{*}\).
-
(iii)
Perform the collision step (6.3) to obtain \(\Pi _{M}[u_{i}^{*},\theta _{i}^{*}]\left( p^{0}\Pi _{M}[u_{i}^{*},\theta _{i}^{*}](\Pi f)_{i}^{n+1}\right) \), and then have \(\Pi _{M}[u^{*}_i,\theta ^{*}_i](\Pi f)_{i}^{n+1}\).
-
(iv)
Calculate \(u^{n+1}_i\) and \(\theta ^{n+1}_i\) by solving (2.24) and (2.26), and then obtain \((\Pi f)_{i}^{n+1}\). Set \(n=n+1\) and turn to Step (i).
It is worth noting that when \(\Pi _{M}[u_{i}^{n},\theta _{i}^{n}]\left( p^{0}\Pi _{M}[u_{i}^{n},\theta _{i}^{n}](\Pi f)_{i}^{*}\right) \) is known, it is easy to obtain \(\Pi _{M}[u_{i}^{n},\theta _{i}^{n}] (\Pi f)_{i}^{*}\) in Step (i), but it is more technical to calculate \( (\Pi f)_{i}^{*}\) from the known value of \(\Pi _{M}[u_{i}^{n},\theta _{i}^{n}] (\Pi f)_{i}^{*}\) in Step (ii), see the following discussion (Lemma 12). The other steps are similar to them.
Lemma 11
If \(u\in (-1,1)\), \(\theta \in \mathbb {R}^{+}\), \(M\ge 1\), and \(0\le f(x,p,t)\le +\infty \), then for any polynomial \(\tilde{f}\) satisfying \(\tilde{f} g^{(0)}_{[u,\theta ]}\in \mathbb {H}_{M}^{g^{(0)}_{[u,\theta ]}}\), equivalently \(\tilde{f}f\in \mathbb {H}_{M}^{f}\), one has
Lemma 12
If \(u_{1},u_{2}\in (-1,1)\), \(\theta _{1},\theta _{2}\in \mathbb {R}^{+}\), \(M\ge 1\), and \(0\le f(x,p,t)\le +\infty \), then the identity
holds.
Lemma 12 implies that in order to calculate
only \(u_{i}^{*}\) and \(\theta _{i}^{*}\) have to be obtained.
It can be done the following procedure. For the given “distribution function” \(\Pi _{M}[u_{i}^{n},\theta _{i}^{n}](\Pi f)_{i}^{*}\), calculate corresponding particle flow \(N^\alpha \) and energy-momentum tensor \(T^{\alpha \beta }\), and then solve directly (2.24) to obtain \(u_{i}^{*}\) and solve (2.26) iteratively to obtain \(\theta _{i}^{*}\) by using Newton-Raphson method.
Remark 12
The function \(G(\theta ^{-1})-\theta \) in (2.26) is a strictly monotonic and convex function of \(\theta \) in the interval \((0,+\infty )\), because
where \(c_{i}^{(0)}\) is the leading coefficient of the polynomial \(P_i ^{(0)}(x;\zeta )\) defined in (3.4), \(i=0,1,2\). It means that the Newton-Raphson method for solving (2.26) is convergent with any positive initial guess.
Remark 13
The present paper does not focus on the numerical solution, but it is worth investigating how the lack of a conservative form of the moment system and corresponding numerical scheme effects the numerical solution. Our numerical results in Sect. 6.2 will show that the numerical solutions of moment system can converge to the reference solution obtained by the discrete velocity model on a fine mesh.
Before ending this subsection, we discuss the stability of the collision step (6.3) even though \(\tau \) is very small.
Theorem 6.1
The semi-implicit scheme (6.3) is unconditionally stable.
All proofs have been given in the Appendix 5.
6.2 Numerical Results
In our numerical experiment, the Knudsen number Kn is chosen as 0.05 and 0.5, respectively, the spatial domain \([-1.5,1.5]\) is divided into a uniform grid of 1000 points, and \(C_{\mathrm{CFL}}=0.9\). In order to verify our results, the reference solutions are provided by using the discrete velocity model (DVM) [41] with a fine spatial grid of 10000 points and 50 Gaussian points in the velocity space.
Figure 4 shows the profiles of the density \(\rho \), velocity u and thermodynamic pressure \(P_{0}\) at \(t=0.3\) obtained by using our scheme (6.2) and (6.3) with \(M=1,2,\ldots ,9\), where \(Kn=0.05\), and the thin lines are the numerical results of the HME (4.20), and the thick lines are the results of DVM, provided as reference solutions. The solid, dashed, and dash-dotted lines denote \(\rho \), u, and \(P_{0}\), respectively. It is clear that the numerical solutions of the HME (4.20) converge to the reference solution of the special relativistic Boltzmann equation (2.15) as M increases. When \(M=1\), the contact discontinuity and shock wave can be obviously observed. It is reasonable because the HME (4.20) are the same as the macroscopic RHD equations (2.21). When \(M=2\), the discontinuities can also observed, but they have been damped. When \(M\ge 3\), the discontinuities are fully damped and the solutions are almost in agreement with the reference solutions. It is similar to the phenomena in the non-relativistic case [4, 5].

Numerical results of the shock tube problem for \(Kn=0.05\). The left y-axis is for \(\rho \) and \(P_{0}\), while the right y-axis is for u. The thin lines are the numerical results of the HME (4.20), and the thick lines are the results of DVM. The solid (blue), dashed (red), and dash-dotted (black) lines denote \(\rho \), u, and \(P_{0}\), respectively (Color figure online)
The results at \(t=0.3\) for the case of \(Kn=0.5\) are shown in Fig. 5. The discontinuities are clearer than the case of \(Kn=0.05\) when \(M=1,2,\ldots , 9\), and the convergence of the moment method can also be readily observed, but it is slower than the case of \(Kn=0.05\). The contact discontinuities and shock waves are obvious when \(M\le 2\), but when \(M>6\), the discontinuities are fully damped and the solutions are almost the same as the reference solutions.

Same as Fig. 4 except for \(Kn=0.5\)
Remark 14
The computational complexity of the above numerical scheme is mainly coming from the Gram-Schmidt orthogonalization and the projection \(\Pi _{M}[u_{i}^{n},\theta _{i}^{n}](\Pi f)_{i+1}^{n}\). For the purpose of numerical computations, it is valuable to look for a more efficient orthogonalization and projection procedure instead of the above.
7 Conclusions
The paper derived the arbitrary order globally hyperbolic moment system of the one-dimensional (1D) special relativistic Boltzmann equation for the first time and studied the properties of the moment system: the eigenvalues and their bound as well as eigenvectors, hyperbolicity, characteristic fields, linear stability, and Lorentz covariance. The key contribution was the careful study of two families of the complicate Grad type orthogonal polynomials depending on a parameter. We derived the recurrence relations and derivative relations with respect to the independent variable and the parameter respectively, and studied their zeros and coefficient matrices in the recurrence formulas. Built on the knowledges of two families of the Grad type orthogonal polynomials with a parameter, the model reduction method by the operator projection [18] was extended to the 1D special relativistic Boltzmann equation.
A semi-implicit operator-splitting type numerical scheme was presented for our hyperbolic moment system and a Cauchy problem was solved to verify the convergence behavior of the moment method in comparison with the discrete velocity method. The results showed that the solutions of our hyperbolic moment system could converge to the solution of the special relativistic Boltzmann equation as the order of the hyperbolic moment system increases.
Now we are deriving the globally hyperbolic moment model of arbitrary order for the 3D special relativistic Boltzmann equation. Moreover, it is interesting to develop robust, high order accurate numerical schemes for the moment system, find other basis for the derivation of moment system with some good property, e.g. non-negativity, and investigate the relativistic effects by using the moment system.
References
Anderson, J.L.: Relativistic Boltzmann theory and Grad method of moments. In: Carmeli, M., Fickler, S.I., Witten, L. (eds.) Relativity, pp. 109–124. Springer, Berlin (1970)
Anderson, J.L.: Relativistic Grad polynomials. J. Math. Phys. 15, 1116–1119 (1974)
Anderson, J.L., Witting, H.R.: A relativistic relaxation-time model for the Boltzmann equation. Physica 74, 466–488 (1974)
Au, J.D., Torrilhon, M., Weiss, W.: The shock tube study in extended thermodynamics. Phys. Fluids 13, 2423–2432 (2001)
Cai, Z., Fan, Y., Li, R.: Globally hyperbolic regularization of Grad’s moment system in one dimensional space. Commun. Math. Sci. 11, 547–571 (2013)
Cai, Z., Fan, Y., Li, R.: Globally hyperbolic regularization of Grad’s moment system. Commun. Pure Appl. Math. 67, 464–518 (2014)
Cai, Z., Fan, Y., Li, R.: A framework on moment model reduction for kinetic equation. SIAM J. Appl. Math. 75, 2001–2023 (2014)
Cai, Z., Li, R.: Numerical regularized moment method of arbitrary order for Boltzmann-BGK equation. SIAM J. Sci. Comput. 32, 2875–2907 (2010)
Cai, Z., Li, R., Wang, Y.: Numerical regularized moment method for high Mach number flow. Commun. Comput. Phys. 11, 1415–1438 (2012)
Cercignani, C.: The Boltzmann Equation and Its Applications. Springer, Berlin (1988)
Cercignani, C., Kremer, G.M.: The Relativistic Boltzmann Equation: Theory and Applications. Birkhauser, Berlin (2002)
Chapman, S., Cowling, T.G.: The Mathematical Theory of Non-uniform Gases, 3rd edn. Cambridge University Press, Cambridge (1991)
Denicol, G.S., Niemi, H., Molnár, E., Rischke, D.H.: Derivation of transient relativistic fluid dynamics from the Boltzmann equation. Phys. Rev. D 85, 114047 (2012)
Denicol, G.S., Kodama, T., Koide, T., Mota, P.: Stability and causality in relativistic dissipative hydrodynamics. J. Phys. G Nucl. Part. Phys. 35, 115102 (2008)
Di, Y., Fan, Y., Li, R., Zheng, L.: Linear stability of hyperbolic moment models for Boltzmann equation. arXiv:1609.03669 (2016)
Eckart, C.: The thermodynamics of irreversible processes. III. Relativistic theory of the simple fluid. Phys. Rev. 58, 919–924 (1940)
Einstein, A.: Relativity: The Special and the General Theory. Three Rivers Press, New York (1995)
Fan, Y., Koellermeier, J., Li, J., Li, R., Torrilhon, M.: Model reduction of kinetic equations by operator projection. J. Stat. Phys. 162, 457–486 (2016)
Florkowski, W., Jaiswal, A., Maksymiuk, E., Ryblewski, R., Strickland, M.: Relativistic quantum transport coefficients for second-order viscous hydrodynamics. Phys. Rev. C 91, 054907 (2015)
Garcia-Perciante, A.L., Sandoval-Villalbazob, A., Garcia-Colin, L.S.: Generalized relativistic Chapman–Enskog solution of the Boltzmann equation. Phys. A 21, 5073–5079 (2008)
Grad, H.: On the kinetic theory of rarefied gases. Commun. Pure Appl. Math. 2, 331–407 (1949)
Grad, H.: Note on \(N\)-dimensional Hermite polynomials. Commun. Pure Appl. Math. 2, 325–330 (1949)
Groot, S.R.D., Leeuwen, W.A.V., Weert, C.G.V.: Relativistic Kinetic Theory: Principles and Applications. North-Holland Press, New York (1980)
Hiscock, W.A., Lindblom, L.: Stability and causality in dissipative relativistic fluids. Ann. Phys. 151, 466–496 (1983)
Hiscock, W.A., Lindblom, L.: Generic instabilities in first-order dissipative relativistic fluid theories. Phys. Rev. D 31, 725–733 (1985)
Hiscock, W.A., Lindblom, L.: Linear plane waves in dissipative relativistic fluids. Phys. Rev. D 35, 3723–3732 (1987)
Hiscock, W.A., Lindblom, L.: Nonlinear pathologies in relativistic heat-conducting fluid theories. Phys. Lett. A 131, 509–513 (1988)
Hiscock, W.A., Olson, T.S.: Effects of frame choice on nonlinear dynamics in relativistic heat-conducting fluid theories. Phys. Lett. A 141, 125–130 (1989)
Israel, W.: Relativistic kinetic theory of a simple gas. J. Math. Phys. 4, 1163–1181 (1963)
Israel, W., Stewart, J.M.: Thermodynamics of nonstationary and transient effects in a relativistic gas. Phys. Lett. A 58, 213–215 (1976)
Israel, W., Stewart, J.M.: Transient relativistic thermodynamics and kinetic theory. Ann. Phys. 118, 341–372 (1979)
Israel, W., Stewart, J.M.: On transient relativistic thermodynamics and kinetic theory II. Proc. R. Soc. Lond. A 365, 43–52 (1979)
Jaiswal, A.: Relativistic third-order dissipative fluid dynamics from kinetic theory. Phys. Rev. C 88, 021903(R) (2013)
Jüttner, F.: Das Maxwellsche gesetz der geschwindigkeitsverteilung in der relativtheorie. Ann. Physik und Chemie 339, 856–882 (1911)
Koellermeier, J., Torrilhon, M.: Hyperbolic moment equations using quadrature based projection methods. AIP Conf. Proc. 1628, 626–633 (2014)
Koellermeier, J., Schaerer, R., Torrilhon, M.: A framework for hyperbolic approximation of kinetic equations using quadrature-based projection methods. Kinet. Relat. Models 7, 531–549 (2014)
Kranyš, M.: Kinetic derivation of nonstationary general relativistic thermodynamics. Nuovo Cim. 8B, 417–441 (1972)
Landau, L.D., Lifshitz, E.M.: Fluid Mechanics, 2nd edn. Pergamon Press, New York (1987)
Lichnerowicz, A., Marrot, R.: Propriétés statistiques des ensembles de particules en relativité restreite. C. R. Acad. Sci. Paris 210, 759–761 (1940)
Marle, C.: Modèle cinétique pour l’établissement des lois de la conduction de la chaleur et de la viscosité en theorié de la relativité. C.R. Acad. Sci. Paris 260, 6539–6541 (1965)
Mieussens, L.: Discrete velocity model and implicit scheme for the BGK equation of rarefied gas dynamics. Math. Models Methods Appl. Sci. 10, 1121–1149 (2000)
Rhebergen, S., Bokhove, O., van der Vegt, J.J.W.: Discontinuous Galerkin finite element methods for hyperbolic nonconservative partial differential equations. J. Comput. Phys. 227, 1887–1922 (2008)
Shen, J., Tang, T., Wang, L.: Spectral Methods: Algorithms, Analysis and Applications. Springer, Berlin (2011)
Stewart, J.M.: On transient relativistic thermodynamics and kinetic theory. Proc. R. Soc. Lond. A 357, 59–75 (1977)
Struchtrup, H.: Projected moments in relativistic kinetic theory. Phys. A 253, 555–593 (1998)
Acknowledgements
This work was partially supported by the Special Project on High-performance Computing under the National Key R&D Program (No. 2016YFB0200603), Science Challenge Project (No. JCKY2016212A502), and the National Natural Science Foundation of China (Nos. 91330205, 91630310, 11421101).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Proofs in Section 2
1.1 Proof of Theorem 2.1
Proof
For the nonnegative distribution f(x, p, t), which is not identically zero, using (2.3) gives
which implies the first inequality in (2.22).
Using the definition of \(\Delta ^{\alpha \beta }\) in (2.6) and the tensor decomposition of \(T^{\alpha \beta }\) in (2.5) gives (2.23), which is a quadratic equation with respect to u. The first inequality in (2.22) tells us that (2.23) has two different solutions whose product is equal to \({c^{2}}\), while one of them with a smaller absolute value is (2.24).
Using further (2.3) gives
i.e. the second inequality in (2.22), and then using the tensor decomposition of \(N^\alpha \) in (2.4) gives
Moreover, using the second identity in (2.17) and (2.3) can give (2.26).
The inequality \({E\ge mc^{2}}\) holds because
and
Thus, it holds
which gives the third inequality in (2.22), and implies that \(G(\theta ^{-1})-\theta >1\) for \(\theta \in (0,+\infty )\).
On the other hand, one has
and
Because
one obtains
which is equivalent to the following inequality
Thus, one has
i.e.
which implies that \(G(\theta ^{-1})-\theta \) is a strictly monotonic function of \(\theta \) in the interval \((0,+\infty )\).
Thus (2.26) has a unique solution in the interval \((0,+\infty )\). The proof is completed. \(\square \)
1.2 Proof of Theorem 2.2
Proof
Under Theorem 2.1, for the nonnegative distribution f(x, p, t), which is not identically zero, one obtains \(\{\rho ,u,\theta \}\) satisfying
Due to the last equations in (2.7) and (2.20), one obtains
which completes the proof. \(\square \)
Appendix 2: Proofs in Section 3
1.1 Proof of Theorem 3.2
Proof
-
(i)
For \(k\le n+2\), taking the inner product with respect to \(\omega ^{(0)}\) between the polynomials \(P_{k}^{(0)}(x;\zeta )\) and \((x^2-1)P_{n}^{(1)}(x;\zeta )\) gives
$$\begin{aligned}&\left( (x^2-1)P_{n}^{(1)},P_{n+2}^{(0)}\right) _{\omega ^{(0)}}=\left( c_{n}^{(1)}x^{n+2},P_{n+2}^{(0)}\right) _{\omega ^{(0)}}= \frac{c_{n}^{(1)}}{c_{n+2}^{(0)}}\left( P_{n+2}^{(0)},P_{n+2}^{(0)}\right) _{\omega ^{(0)}}=r_{n+1},\\&\left( (x^2-1)P_{n}^{(1)},P_{n+1}^{(0)}\right) _{\omega ^{(0)}}\\&\quad = \left( c_{n}^{(1)}\left( x^{n+2}-\sum _{i=1}^{n+2}x_{i,n+2}^{(0)}x^{n+1}+ \left( \sum _{i=1}^{n+2}x_{i,n+2}^{(0)}-\sum _{i=1}^{n}x_{i,n}^{(1)}\right) x^{n+1}\right) ,P_{n+1}^{(0)}\right) _{\omega ^{(0)}}\\&\quad =r_{n+1}\left( P_{n+2}^{(0)},P_{n+1}^{(0)}\right) _{\omega ^{(0)}}+ q_{n}\left( P_{n+1}^{(0)},P_{n+1}^{(0)}\right) _{\omega ^{(0)}}=q_{n},\\&\left( (x^2-1)P_{n}^{(1)},P_{n+1}^{(0)}\right) _{\omega ^{(0)}}\\&\quad =\left( P_{n}^{(1)},c_{n+1}^{(0)} \left( x^{n+1}-\sum _{i=1}^{n+1}x_{i,n+1}^{(1)}x^{n}+ \left( \sum _{i=1}^{n+1}x_{i,n+1}^{(1)}-\sum _{i=1}^{n+1}x_{i,n+1}^{(0)}\right) x^{n}\right) \right) _{\omega ^{(1)}}\\&\quad =p_{n+1}\left( P_{n}^{(1)},P_{n+1}^{(1)}\right) _{\omega ^{(1)}}+\frac{c_{n+1}^{(0)}}{c_{n}^{(1)}}\left( \sum _{i=1}^{n+1}x_{i,n+1}^{(1)}- \sum _{i=1}^{n+1}x_{i,n+1}^{(0)}\right) \left( P_{n}^{(1)},P_{n}^{(1)}\right) _{\omega ^{(1)}}\\&\quad =\frac{c_{n+1}^{(0)}}{c_{n}^{(1)}} \sum _{i=1}^{n+1} \left( x_{i,n+1}^{(1)}-x_{i,n+1}^{(0)}\right) =q_{n}, \\&\left( (x^2-1)P_{n}^{(1)},P_{n}^{(0)}\right) _{\omega ^{(0)}} =\left( P_{n}^{(1)},P_{n}^{(0)}\right) _{\omega ^{(1)}}= \left( P_{n}^{(1)},c_{n}^{(0)}x^{n}\right) _{\omega ^{(1)}}\\&\qquad \qquad \qquad \qquad \qquad \qquad \quad =p_{n}\left( P_{n}^{(1)},P_{n}^{(1)}\right) _{\omega ^{(1)}}= p_{n},\\&\left( (x^2-1)P_{n}^{(1)},P_{k}^{(0)}\right) _{\omega ^{(0)}} =\left( P_{n}^{(1)},P_{k}^{(0)}\right) _{\omega ^{(1)}}=0, \quad k\le n-1, \end{aligned}$$ -
(ii)
Taking the inner product with respect to \(\omega ^{(1)}\) between \(P_{n+1}^{(0)} (x;\zeta )\) and \(P_{k}^{(1)} (x;\zeta )\) with \(k\le n+1\)
$$\begin{aligned} \left( P_{n+1}^{(0)},P_{n+1}^{(1)}\right) _{\omega ^{(1)}}&= \left( c_{n+1}^{(0)}x^{n+1},P_{n+1}^{(1)}\right) _{\omega ^{(1)}} =p_{n+1}\left( P_{n+1}^{(1)},P_{n+1}^{(1)}\right) _{\omega ^{(1)}}=p_{n+1},\\ \left( P_{n+1}^{(0)},P_{n}^{(1)}\right) _{\omega ^{(1)}}&= \left( P_{n+1}^{(0)},(x^2-1)P_{n}^{(1)}\right) _{\omega ^{(0)}}=q_{n}, \\ \left( P_{n+1}^{(0)},P_{n-1}^{(1)}\right) _{\omega ^{(1)}}&=\left( P_{n+1}^{(0)},(x^2-1)P_{n-1}^{(1)}\right) _{\omega ^{(0)}}= r_{n}\left( P_{n+1}^{(0)},P_{n+1}^{(0)}\right) _{\omega ^{(0)}}=r_{n},\\ \left( P_{n+1}^{(0)},P_{k}^{(1)}\right) _{\omega ^{(1)}}&=\left( P_{n+1}^{(0)},(x^2-1)P_{k}^{(1)}\right) _{\omega ^{(0)}}=0, \quad k\le n-2. \end{aligned}$$ -
(iii)
If using (3.6) to eliminate \(P_{n+2}^{(0)}\) and \(P_{n+1}^{(1)}\) in (3.9) and (3.10) respectively, then one obtains
$$\begin{aligned} (x^2-1)P_{n}^{(1)}=\tilde{p}_{n}(x+\tilde{q}_{n})P_{n+1}^{(0)}+\tilde{r}_{n}P_{n}^{(0)},\quad P_{n+1}^{(0)}=\frac{1}{\tilde{\tilde{p}}_{n}}\big (x-\tilde{\tilde{q}}_{n}\big )P_{n}^{(1)}-\frac{a_{n-1}^{(1)}}{a_{n}^{(0)}}\tilde{\tilde{r}}_{n}P_{n-1}^{(1)}, \end{aligned}$$with
$$\begin{aligned} \tilde{p}_{n}= & {} \frac{r_{n+1}}{a_{n+1}^{(0)}}=\frac{c_{n}^{(1)}}{c_{n+1}^{(0)}}=\frac{a_{n}^{(1)}}{p_{n+1}}=\tilde{\tilde{p}}_{n},\\ \tilde{q}_{n}= & {} \frac{1}{\tilde{p}_{n}}q_{n}-b_{n+1}^{(0)}=\sum _{i=1}^{n+1}x_{i,n+1}^{(0)}-\sum _{i=1}^{n}x_{i,n}^{(1)}=b_{n}^{(1)}-\tilde{p}_{n}q_{n}=\tilde{\tilde{q}}_{n},\\ \tilde{r}_{n}= & {} p_{n}-\tilde{p}_{n}a_{n}^{(0)}={p_{n}(1-\tilde{p}_{n}^{2})} =\frac{a_{n}^{(0)}}{a_{n-1}^{(1)}}\left( -r_{n}+\frac{1}{\tilde{p}_{n}}a_{n-1}^{(1)}\right) = \tilde{\tilde{r}}_{n}. \end{aligned}$$The proof is completed.
\(\square \)
1.2 Proof of Theorem 3.3
Proof
With the aid of definition and recurrence relation of the second kind modified Bessel function in (2.18) and (2.19), one has
Taking the partial derivative of both sides of identities
with respect to \(\zeta \) and using (3.8) gives
Thus one has
Because \(\frac{\partial P_{n+1}^{(\ell )}}{\partial \zeta }\) is a polynomial and its degree is not larger than \( n+1\), using (3.3) gives (3.17). The proof is completed. \(\square \)
1.3 Proof of Theorem 3.4
Proof
Similar to the proof of Theorem 3.3, one has
Because the degrees of polynomials \(\frac{\partial P_{n+1}^{(0)}}{\partial x}\) and \((x^2-1)\frac{\partial P_{n}^{(1)}}{\partial x}+xP_{n}^{(1)}\) are not larger than n and \(n+1\), respectively, and
one can calculate the expansion coefficients in (3.3) as follows
and
The proof is completed. \(\square \)
1.4 Proof of Theorem 3.6
Proof
Substituting \(\{x_{i,n+1}^{(0)}\}_{i=1}^{n+1}\) into (3.14) gives
which implies that \(\tilde{r}_{n}\ne 0\). In fact, if assuming \(\tilde{r}_{n}=0\), then the above identity and the fact that \((x_{i,n+1}^{(0)})^2-1>0\) imply \(P_{n}^{(1)}(x_{i,n+1}^{(0)};\zeta )=0\), which contradicts with \(P_{n}^{(1)}\) being a polynomial of degree n.
Using Theorem 3.5 gives
Thus there exists at least one zero of the polynomial \(P_{n}^{(1)}\) in each subinterval \(\left( x_{i,n+1}^{(0)},x_{i+1,n+1}^{(0)}\right) \). The proof is completed. \(\square \)
1.5 Proof of Corollary 1
Proof
It is obvious that
Using Theorems 3.1 and 3.6 gives
which imply \(q_{n}>0\) and \(\tilde{q}_{n}>0\).
Comparing the coefficients of the nth order terms at two sides of (3.14) gives
where \(x_{0,n}^{(1)}=0\).
Combining it with Theorem 3.6 gives \(\tilde{r}_{n}>0\). The proof is completed. \(\square \)
1.6 Proof of Corollary 3
Proof
Taking partial derivative of \(P_{n}^{(\ell )}(x_{i,n}^{(\ell )};\zeta )\) with respect to \(\zeta \) and using Theorem 3.3 gives
Due to Theorem 3.5, one has
Combining them completes the proof. \(\square \)
1.7 Proof of Lemma 1
Proof
According to the definition of \(Q_{2n}(x;\zeta )\) in (3.30), it is not difficult to know that \(Q_{2n}(x;\zeta )\) is an even function and a polynomial of degree 2n.
If taking x in (3.30) as the zero of \(P_{n+1}^{(0)}(x;\zeta )\), i.e. \(x=x_{i,n+1}^{(0)}\), \(i=1,\ldots ,{n+1}\), then one has
Since
using Theorem 3.6 gives
for \(i=1,\ldots ,n\), which implies that there exists at least one zero of \(Q_{2n}(x;\zeta )\) in each subinterval \( (x_{i,n+1}^{(0)},x_{i+1,n+1}^{(0)})\), \(i=1,\ldots ,n\). Because \(Q_{2n}(x;\zeta )\) is an even polynomial of degree 2n, there exists exactly one zero of \(Q_{2n}(x;\zeta )\) in each subinterval \((x_{i,n+1}^{(0)},x_{i+1,n+1}^{(0)})\), \(i=1,\ldots ,n\). The proof is completed. \(\square \)
1.8 Proof of Lemma 2
Proof
According to the definition of \(Q_{2n}(x;\zeta )\) in (3.30), one has
Using Theorem 3.3 gives
Substituting (3.14) and (3.15) into it gives
where
Similarly, using Theorem 3.4 and (3.14)-(3.15) gives
Using Theorem 3.6 gives
for \(i=1,\ldots ,n\), which imply
Thus one has
Using Corollaries 1 and 2, and the above results gives (3.31).
The proof is completed. \(\square \)
1.9 Proof of Lemma 3
Proof
Taking partial derivative of \(Q_{2n}(z_{i,n};\zeta )\) with respect to \(\zeta \) gives
Using Lemma 2 completes the proof. \(\square \)
1.10 Proof of Theorem 3.7
Proof
Obviously, both vectors \(\mathbf {u}_{i,n}\) and \(\mathbf {v}_{i,n}\) defined in (3.35) are not zero at the same time, \(i=\pm 1,\ldots ,\pm n\). The nonzero eigenvalues and eigenvectors of the matrix pair \(\mathbf {A}^{0}_{n}\) and \(\mathbf {A}^{1}_{n}\) in (3.32) and (3.34) can be obtained with the aid of (3.28)-(3.29) and Lemma 1. Using Lemma 3 further gives (3.33).
In the following, let us discuss the eigenvector \(\mathbf {y}_{0,n}\). Multiplying (3.12) by \(P_{n+1}^{(0)}(-x;\zeta )\) gives
Transforming (9.1) by x to \(-x\) and then subtracting it from (9.1) and letting \(x=1\) gives as follows
which is a special case of (3.21) with \( \hat{\lambda } =0\).
The proof is completed. \(\square \)
Appendix 3: Proofs in Section 4
1.1 Proof of Lemma 4
Proof
-
(i)
Due to the definition of E and \(p_{{\langle }1{\rangle }}\), it is obvious that each component of \(\mathbf {\mathcal {P}}_{\infty }[u,\theta ]\) (resp. \(\mathbf {\mathcal {P}}_{M}[u,\theta ]\)) belongs to \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}\) (resp. \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\)).
-
(ii)
The mathematical induction is used to prove that any element in the space \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}\) (resp. \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\)) can be expressed as a linear combination of vectors in \(\mathbf {\mathcal {P}}_{\infty }[u,\theta ]\) (resp. \(\mathbf {\mathcal {P}}_{M}[u,\theta ]\)) . For \(M=1\), it is clear to have the linear combination
$$\begin{aligned} p^{\alpha }g^{(0)}_{[u,\theta ]}\overset{(2.9)}{=}&\left( p^{{\langle }\alpha {\rangle }}+U^{\alpha }E\right) g^{(0)}_{[u,\theta ]} \overset{(2.8)}{=} \left( -(U^{0})^{-1}U^{1-\alpha }p_{{\langle }1{\rangle }}+U^{\alpha }E\right) g^{(0)}_{[u,\theta ]}\\ \overset{(3.5)}{=}&-(c_{0}^{(1)})^{-1}U^{1-\alpha }\tilde{P}_{0}^{(1)}[u,\theta ]+ (c_{1}^{(0)})^{-1}U^{\alpha }\tilde{P}_{1}^{(0)}[u,\theta ]\\&+(c_{0}^{(0)})^{-1}U^{\alpha }x_{1,1}^{(0)}\tilde{P}_{0}^{(0)}[u,\theta ], \end{aligned}$$where the decomposition of the particle velocity vector (2.9) has been used. Assume that the linear combination
$$\begin{aligned} p^{\mu _{1}}p^{\mu _{2}}\ldots p^{\mu _{M}}g^{(0)}_{[u,\theta ]}=&\sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}\tilde{P}_{i}^{(0)}[u,\theta ] +\sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}\tilde{P}_{i}^{(1)}[u,\theta ],\\&\mu _{i}=0,1, i\in \mathbb {N}, i\le M, \quad c_{i,0}^{\mu _{1},\ldots ,\mu _{M}},c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}\in \mathbb {R}, \end{aligned}$$holds. One has to show that \(p^{\mu _{1}}p^{\mu _{2}}\ldots p^{\mu _{M+1}}g^{(0)}_{[u,\theta ]}\) can be expressed as a linear combination of components of \(\mathbf {\mathcal {P}}_{M+1}[u,\theta ]\). Because
$$\begin{aligned}&p^{\mu _{1}}p^{\mu _{2}}\ldots p^{\mu _{M+1}}g^{(0)}_{[u,\theta ]}\\&=\left( \sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}\tilde{P}_{i}^{(0)}[u,\theta ] +\sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}\tilde{P}_{i}^{(1)}[u,\theta ]\right) \\&\times \left( -(U^{0})^{-1}U^{1-\mu _{M+1}}p_{{\langle }1{\rangle }}+U^{\mu _{M+1}}E\right) \\&=\sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}U^{\mu _{M+1}}E\tilde{P}_{i}^{(0)}[u,\theta ] -\sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}U^{1-\mu _{M+1}}(E^2-1)P_{i}^{(1)}(E;\zeta )\\&\quad -\sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}(U^{0})^{-1}U^{1-\mu _{M+1}}P_{i}^{(0)}(E;\zeta )p_{{\langle }1{\rangle }}+ \sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}U^{\mu _{M+1}}\tilde{P}_{i}^{(1)}[u,\theta ], \end{aligned}$$one has
$$\begin{aligned}&p^{\mu _{1}}p^{\mu _{2}}\ldots p^{\mu _{M+1}}g^{(0)}_{[u,\theta ]}\\&\quad =\sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}U^{\mu _{M+1}} \left( a_{i-1}^{(0)}\tilde{P}_{i-1}^{(0)}[u,\theta ]+b_{i}^{(0)}\tilde{P}_{i}^{(0)}[u,\theta ]+a_{i}^{(0)}\tilde{P}_{i+1}^{(0)}[u,\theta ]\right) \\&\qquad -\sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}U^{1-\mu _{M+1}} \left( p_{i}\tilde{P}_{i}^{(0)}[u,\theta ]+q_{i}\tilde{P}_{i+1}^{(0)}[u,\theta ]+r_{i+1}\tilde{P}_{i+2}^{(0)}[u,\theta ]\right) \\&\qquad -\sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}U^{1-\mu _{M+1}} \left( r_{i-1}\tilde{P}_{i-2}^{(1)}[u,\theta ]+q_{i-1}\tilde{P}_{i-1}^{(1)}[u,\theta ]+p_{i}\tilde{P}_{i}^{(1)}[u,\theta ]\right) \\&\qquad +\sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}U^{\mu _{M+1}} \left( a_{i-1}^{(1)}\tilde{P}_{i-1}^{(1)}[u,\theta ]+b_{i}^{(1)}\tilde{P}_{i+1}^{(1)}[u,\theta ]+a_{i}^{(1)}\tilde{P}_{i+1}^{(1)}[u,\theta ]\right) \\&\quad =:\sum _{i=0}^{M+1}c_{i,0}^{\mu _{1},\ldots ,\mu _{M+1}}\tilde{P}_{i}^{(0)}[u,\theta ] +\sum _{i=0}^{M}c_{i,1}^{\mu _{1},\ldots ,\mu _{M+1}}\tilde{P}_{i}^{(1)}[u,\theta ]{,} \end{aligned}$$by using the three-term recurrence relations (3.6), (3.9), and (3.10) for the orthogonal polynomials \(\{P_{n}^{(\ell )}(x;\zeta ), \ell =0,1\}\).
-
(iii)
Using (3.1) gives
$$\begin{aligned} {\langle }\tilde{P}_{i}^{(\ell )}[u,\theta ],\tilde{P}_{j}^{(\ell )}[u,\theta ]{\rangle }_{g^{(0)}_{[u,\theta ]}}= \left( P_{i}^{(\ell )},P_{j}^{(\ell )}\right) _{ \omega ^{(\ell )}}=\delta _{i,j},\ \ell =0,1. \end{aligned}$$(10.1)Because of (2.9), one has
$$\begin{aligned} \frac{dp}{p^{0}}=dp_{{\langle }1{\rangle }}\frac{-1+u(U^{0}E)^{-1}p_{{\langle }1{\rangle }}}{-up_{{\langle }1{\rangle }}+U^{0}E}=-\frac{dp_{{\langle }1{\rangle }}}{U^{0}E}, \quad E=\sqrt{\left( (U^{0})^{-1}p_{{\langle }1{\rangle }}\right) ^2+1}. \end{aligned}$$Thus it holds
$$\begin{aligned} \nonumber {\langle }\tilde{P}_{i}^{(0)}[u,\theta ],\tilde{P}_{j}^{(1)}[u,\theta ]{\rangle }_{g^{(0)}_{[u,\theta ]}}=&\int _{\mathbb {R}}g^{(0)}_{[u,\theta ]}P_{i}^{(0)}(E;\zeta )P_{j}^{(1)}(E;\zeta )(U^{0})^{-1}p_{{\langle }1{\rangle }}\frac{dp}{p^{0}}\\ =&-\int _{\mathbb {R}}g^{(0)}_{[u,\theta ]}P_{i}^{(0)}(E;\zeta )P_{j}^{(1)}(E;\zeta )(U^{0})^{-1}p_{{\langle }1{\rangle }}\frac{dp_{{\langle }1{\rangle }}}{U^{0}E}=0. \end{aligned}$$(10.2)Combining (i) and (ii) with (iii) completes the proof.
\(\square \)
1.2 Proof of Lemma 5
Proof
For \(s=t\) and x, it is clear to have
Using the above identities and (4.1) gives
The derivation rule of compound function gives
Combining them and using Theorems 3.1–3.4 complete the proof. \(\square \)
1.3 Proof of Lemma 6
Proof
Using the three-term recurrence relations (3.7), (3.11), and (3.12) gives
where \(\mathbf {e}_{2M+1}^{3}\) is the \((M+1)\)th column of the identity matrix of order \((2M+1)\). Thus one has
Combining them with (2.9) completes the proof. \(\square \)
1.4 Proof of Lemma 7
Proof
It is obvious that \(\Pi _{M}[u,\theta ]\) is a linear bounded operator and \(\Pi _{M}[u,\theta ]f\in \mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\) for all \(f\in \mathbb {H}^{g^{(0)}_{[u,\theta ]}}\).
For all \(f\in \mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\), besides (4.7), by using Lemma 4 one has
Taking respectively the inner product with \(\tilde{P}_{i}^{(0)}[u,\theta ]\) and \(\tilde{P}_{j}^{(1)}[u,\theta ]\) from both sides of the last equation gives
Comparing them with the coefficients in (4.9) shows that \(\tilde{f}_{i}^{0}=f_{i}^{0}\), \(\tilde{f}_{j}^{1}=f_{j}^{1}\),
\(i=0,\ldots , M\), \(j=1,\ldots ,M-1\). The proof is completed. \(\square \)
Appendix 4: Proofs in Section 5
1.1 Proof of Lemma 8
Proof
It is obvious that for \(M=1\), the matrix \(\mathbf {D}_M\) is invertible because
\(\det (\mathbf {D}_M)=\rho \zeta ^2c_0^{(1)}(c_0^{(0)}c_1^{(0)}(1-u^2))^{-1}>0\). For \(M\ge 2\), according to the form of \(\mathbf {D}_M\) in Sect. 4.2, one has
Using \(\Pi >-\rho \theta \) gives
The proof is completed. \(\square \)
1.2 Proof of Theorem 5.1
Proof
Consider the following generalized eigenvalue problem (2nd sense): Find a vector \(\mathbf {r}\) that obeys \(\lambda \mathbf {B}_{M}^{0}\mathbf {r}=\mathbf {B}_{M}^{1}\mathbf {r}\) or \( \lambda \mathbf {M}_{M}^{t}\mathbf {D}_{M}\mathbf {r}=\mathbf {M}_{M}^{x}{\mathbf {D}}_{M}\mathbf {r}\). Thanks to (4.5), this eigenvalue problem is equivalent to
Because Theorem 3.7 tells us that \( \hat{\lambda } _{i,M}\) and \(\mathbf {y}_{i,M}\) satisfy
the scalar \(\lambda _{i,M}\) in (5.1) and vector \(\mathbf {r}_{i,M}\) in (5.2) solve the above generalized eigenvalue problem,
and satisfy
The proof is completed. \(\square \)
1.3 Proof of Lemma 9
Proof
Because \(U^{0}\mathbf {M}_{M}^{t}-U^{1}\mathbf {M}_{M}^{x}=\mathbf {P}_{M}^{p}A_{M}^{0}(\mathbf {P}_{M}^{p})^{T}\) and the permutation matrix \(\mathbf {P}_{M}^{p}\) in (4.6) satisfies \(\mathbf {P}_{M}^{p}(\mathbf {P}_{M}^{p})^{T}=(\mathbf {P}_{M}^{p})^{T}\mathbf {P}_{M}^{p}={\mathbf {I}}\), two matrices \(U^{0}\mathbf {M}_{M}^{t}-U^{1}\mathbf {M}_{M}^{x}\) and \(\mathbf {A}_{M}^{0}\) are similar and thus have the same eigenvalues. The definition of \(\mathbf {A}_{M}^{0}\) in (3.20) tells us that the eigenvalues of \(\mathbf {A}_{M}^{0}\) are the zeros of \(P_{M+1}^{(0)}(x;\zeta )\) and \(P_{M}^{(1)}(x;\zeta )\) which are larger than one [43, Theorem 3.4], so the matrix \(U^{0}\mathbf {M}_{M}^{t}-U^{1}\mathbf {M}_{M}^{x}\) is positive definite.
Theorem 3.7 implies
where \(\rho (\cdot )\) is the spectral radius of the matrix. Then \([{\mathbf {I}}-\left( (U^{0}\mathbf {A}_{M}^{0})^{-\frac{1}{2}}U^{1}\mathbf {A}_{M}^{1}(U^{0}\mathbf {A}_{M}^{0})^{-\frac{1}{2}}\right) \) is positive definite, so the matrix \({\mathbf {M}}_{M}^{t}\) is positive definite. \(\square \)
1.4 Proof of Theorem 5.2
Proof
Lemmas 8 and 9 show that the matrix \(\mathbf {B}_{M}^{0}=\mathbf {M}^{t}_{M}\mathbf {D}_{M}\) is invertible, and Theorem 5.1 implies that \(\mathbf {B}_{M}\) is diagonalizable with real eigenvalues and the spectral radius of \(\mathbf {B}_{M}\) is less than one. The proof is completed. \(\square \)
1.5 Proof of Theorem 5.3
Proof
Because
and \( \mathbf {r}_{i,M}=\mathbf {D}_{M}^{-1}\mathbf {P}_{M}^{p}\left( (\mathbf {u}_{i,M})^{T},(\mathbf {v}_{i,M})^{T}\right) ^{T}\), \(i=-M,\ldots , M\), one has
where \(\tilde{\mathbf {r}}_{i}^{M}=\left( (\mathbf {u}_{i,M}^{(3)})^{T},(\mathbf {v}_{i,M}^{(2)})^{T}\right) ^{T}\), \(\mathbf {u}_{i,M}^{(3)}\) and \(\mathbf {v}_{i,M}^{(2)}\) denote two vectors formed by first three and two components of \(\mathbf {u}_{i,M}\) and \(\mathbf {v}_{i,M}\) respectively, and \(\mathbf {d}_{2}\) and \(\mathbf {d}_{3}\) are the second and third row of \(\mathbf {D}_{2}^{-1}\), specifically
The identity (11.1) always holds, because \( \hat{\lambda } _{0,M}=0\) and \(\mathbf {u}_{0,M}\) and \(\mathbf {v}_{0,M}\) are given in (3.36).
The proof is completed. \(\square \)
1.6 Explanation of Remark 11
In fact, in order to judge by numerical experiments whether the sign of \( \nabla _{\mathbf {W}_{M}}\lambda _{i,M}\cdot \mathbf {r}_{i,M}\) is constant or not, (11.1) should be reformed. For \(i=\pm 1,\pm 2,\ldots ,\pm M\), Theorem 3.7 and (11.1) give
Only a simple case is discussed in the following. As shown in Remark 2, at the local thermodynamic equilibrium, \(\Pi =0\) and \(n^\alpha =0\), thus one has
Using the term
to normalize the above identity and noting that
gives
where \(\hat{g}(z_{i,M};\zeta )\) is defined by
and \(\hat{g}(z_{i,M};\zeta ):=\hat{g}(z_{-i,M};\zeta )\) for \(i\le -1\). It is relatively easy to judge by numerical experiments whether the sign of \(\hat{g}(z_{i,M};\zeta )\) is constant or not. Figure 6 shows plots of \(\hat{g}(z_{1,4};\zeta )\) and \(\hat{g}(z_{1,7};\zeta )\) in terms of \(\zeta \). Similar to the special case of \(M=4\) and 7, our observation in numerical experiments is that the sign of \(\hat{g}(z_{1,M};\zeta )\) is not constant when \(M\ge 4\) so that both \(\lambda _{1,M}\) and \(\lambda _{-1,M}\) characteristic fields are neither linearly degenerate nor genuinely nonlinear when \(M\ge 4\). Such phenomenon is still not found in the case of \(M\le 3\).

Plots of \(\hat{g}(z_{1,M};\zeta )\) in terms of \(\zeta \) for \(M=4\) (left) and 7 (right)
1.7 Proof of Theorem 5.4
Proof
Because the matrix \(\mathbf {D}_M\) in (4.14) at \(\mathbf {W}_{M}=\mathbf {W}_{M}^{(0)}\) can be reformed as follows
and its inverse is given by
as well as
the product of \(\tilde{\mathbf {D}}_{M}^{W}\) and \(\mathbf {D}_{M}^{-1}\) is of the form
where \(\mathbf {D}_{3\times 3}^{11}\) is the \(3\times 3\) subblock of \(\mathbf {D}_{2}\) in the upper left corner, \(\mathbf {D}_{3\times 2}^{12}\) denotes the \(3\times 2\) subblock of \(\mathbf {D}_{2}\) in the upper right corner, and \(\mathbf {D}_{2\times 2}^{22}\) is \(2\times 2\) subblock of \(\mathbf {D}_{2}\) in the bottom right corner. It is obvious that each eigenvalue of \(-\tilde{\mathbf {D}}_{M}^{W}\mathbf {D}_{M}^{-1}\) is non-positive, so does the matrix
The matrix \( U^{0}\mathbf {M}_{M}^{t}-U^{1}\mathbf {M}_{M}^{x} \) can be written as follows
where \(\mathbf {M}_{3\times 3}^{11}\) is the \(3\times 3\) subblock of \(\mathbf {P}_{2}^{p}\mathbf {A}_{2}^{0}(\mathbf {P}_{2}^{p})^{T}\) in the upper left corner, \(\mathbf {M}_{3\times 2}^{12}\) denotes the \(3\times 2\) subblock of \(\mathbf {P}_{2}^{p}\mathbf {A}_{2}^{0}(\mathbf {P}_{2}^{p})^{T}\) in the upper right corner, and \(\mathbf {M}_{2\times 2}^{22}\) is \(2\times 2\) subblock of \(\mathbf {P}_{2}^{p}\mathbf {A}_{2}^{0}(\mathbf {P}_{2}^{p})^{T}\) in the bottom right corner, the rest subblocks form the \((2M-2)\times (2M-2)\) bottom right corner of \(\mathbf {P}_{2}^{p}\mathbf {A}_{M}^{0}(\mathbf {P}_{M}^{p})^{T}\). Thus one has
which is symmetric because \( \mathbf {M}_{3\times 3}^{11}\mathbf {D}_{3\times 2}^{12}\left( \mathbf {D}_{2\times 2}^{22}\right) ^{-1}+ \mathbf {M}_{3\times 2}^{12}=\mathbf {O}_{3\times 2}. \)
On the other hand, because the first three components of \(\mathbf {S}(\mathbf {W}_M)\) are zero, all elements in the first three rows and the first three columns of the matrix
are zero, and the matrix \(\mathbf {Q}_{M}\) is of form
Hence the matrix \(\mathbf {Q}_{M}\) is symmetric. It is obvious that \(\mathbf {Q}_{M}\) is congruent with \(\bar{\mathbf {Q}}_{M}\), so it is negative semi-definite.
Because both matrices \(\mathbf {D}_{M}\) and \(\mathbf {M}_{M}^{t}\) are invertible, and \(\mathbf {M}_{M}^{t}\) is positive definite, (5.4) is equivalent to
where
and
It is obvious that the matrix \(\hat{\mathbf {Q}}_{M}\) is congruent with \(\mathbf {Q}_{M}\) and negative semi-definite, and \(\mathbf {M}_{M}\) is symmetric. Using Lemmas 1 and 2 in [15] completes the proof. \(\square \)
1.8 Proof of Lemma 10
Proof
-
(i)
Under the given Lorentz boost (x direction)
$$\begin{aligned} t'=\gamma (v) (t-vx),\ x'=\gamma (v)(x-vt),\ \gamma (v)=(1-v^2)^{-\frac{1}{2}}, \end{aligned}$$where v is the relative velocity between frames in the x-direction, one has
$$\begin{aligned}&(p^{0})'=\gamma (v)(p^{0}-p^{1}v),\quad (p^{1})'=\gamma (v)(p^{1}-p^{0}v), \\&(U^{0})'=\gamma (v)(U^{0}-U^{1}v),\quad (U^{1})'=\gamma (v)(U^{1}-U^{0}v). \end{aligned}$$Thus one further obtains
$$\begin{aligned} E'= (U^{0})'(p^{0})'-(U^{1})'(p^{1})'=U^{0}p^{0}-U^{1}p^{1}=E, \end{aligned}$$and
$$\begin{aligned} \left( \frac{p_{{\langle }1{\rangle }}}{U^{0}}\right) '=&\frac{-(p^{{\langle }1{\rangle }})'}{(U^{0})'}=-\frac{p^{{\langle }0{\rangle }}-p^{{\langle }1{\rangle }}v}{U^{1}-U^{0}v}=-\frac{(U^{0})^{-1}U^{1}p^{{\langle }1{\rangle }}-p^{{\langle }1{\rangle }}v}{U^{1}-U^{0}v}=\frac{p_{{\langle }1{\rangle }}}{U^{0}}, \\ \left( \frac{dp}{p^{0}}\right) '=&\frac{d(p^{1})'}{(p^{0})'}=\frac{dp^{0}-dp^{1}v}{p^{1}-p^{0}v}=\frac{(p^{0})^{-1}p^{1}dp^{1}-dp^{1}v}{p^{1}-p^{0}v}=\frac{dp}{p^{0}}. \end{aligned}$$Combining them with (4.9) gives that each component of \(\mathbf {f}_{M}\) is Lorentz invariant, so that the last \((2M-4)\) components of \(\mathbf {W}_{M}\) are also Lorentz invariant. From (2.17) and (2.20), it is not difficult to prove that \(\rho \) and \(\theta \) are Lorentz invariant. On the other hand, because
$$\begin{aligned} \tilde{n}^{1}=\int _{\mathbb {R}}\frac{p^{{\langle }1{\rangle }}}{U^{0}}f\frac{dp}{p^{0}}, \end{aligned}$$the quantity \(\tilde{n}^{1}\) is Lorentz invariant. Moreover, one has
$$\begin{aligned} \left( \frac{du}{1-u^2}\right) '=\frac{d(U^{1})'}{(U^{0})'}=\frac{dU^{0}-dU^{1}v}{U^{1}-U^{0}v}=\frac{(U^{0})^{-1}U^{1}dU^{1}-dU^{1}v}{U^{1}-U^{0}v}=\frac{dU^{1}}{U^{0}}=\frac{du}{1-u^2}. \end{aligned}$$Using the above results completes the proof of the first part.
-
(ii)
Because \(\mathbf {A}_{M}^{0}\) and \(\mathbf {A}_{M}^{1}\) only depend on \(\theta \), they are Lorentz invariant. The source term \(\mathbf {S}(\mathbf {W}_{M})\) in (4.21) can be rewritten into
$$\begin{aligned} \mathbf {S}(\mathbf {W}_{M})=-\frac{1}{\tau }\mathbf {P}_{M}^{p}\mathbf {A}_{M}^{0}(\mathbf {P}_{M}^{p})^{T}\left( \mathbf {f}_{M}-\mathbf {f}^{(0)}_{M}\right) , \end{aligned}$$which has been expressed in terms of the Lorentz covariant quantities. In fact, the general source term \(\mathbf {S}(\mathbf {W}_{M})\) in the moment system (4.20) is also Lorentz invariant. The proof is completed.
\(\square \)
1.9 Proof of Theorem 5.5
Proof
From the 3rd step in Sec. 4.2 and Lemma 10, one knows that \(\hat{\mathbf {D}}_{M}=\mathbf {D}_M(\mathbf {D}_{M}^{u})^{-1}\) can be expressed in terms of the Lorentz covariant quantities, so it is Lorentz invariant. Because
and
one has
where the last equal sign is derived by following the proof of Lemma 10. Similarly, one has
Thus it holds
Combining it with Lemma 10 completes the proof. \(\square \)
Appendix 5: Proofs in Section 6
1.1 Proof of Lemma 11
Proof
where
Therefore one has
The proof is completed. \(\square \)
1.2 Proof of Lemma 12
Proof
Using Lemma 7 gives
Because both \({P}_{i}^{(0)}(u_{1},\zeta _{1})f\) and \({P}_{j}^{(1)}(u_{1},\zeta _{1})(U_{0})_{1}^{-1}p_{{\langle }1{\rangle }}f\) belong to the space \(\mathbb {H}_{M}^{f}\), using Lemma 11 completes the proof. \(\square \)
1.3 Proof of Theorem 6.1
Proof
Because Eq. (6.3) is equivalent to
it is unconditionally stable if and only if the modulus of each eigenvalue of the matrix
is not less than one. It is true if the real part of each eigenvalue of the matrix
is non-negative.
In fact, thanks to (6.4), the characteristic polynomial of the upper triangular matrix \( \mathbf {I}-\mathbf {D}_{i,M}^{f_{i}^{(0)*}}\) is explicitly given by
and \(\bar{\mathbf {M}}_{D}^{*}\) is a symmetric matrix and congruent with
which is similar to the matrix \( \mathbf {I}-\mathbf {D}_{i,M}^{f_{i}^{(0)*}}\). Thus the matrix \(\bar{\mathbf {M}}_{D}^{*}\) is positive semi-definite and each eigenvalue of the matrix \( \left( \mathbf {M}_{i,M}^{t*}\right) ^{-1}\bar{\mathbf {M}}_{D}^{*}\) is non-negative because of the relation \( \left( \mathbf {M}_{i,M}^{t*}\right) ^{-1}\bar{\mathbf {M}}_{D}^{*} =\left( \mathbf {M}_{i,M}^{t*}\right) ^{-\frac{1}{2}} \big ( \left( \mathbf {M}_{i,M}^{t*}\right) ^{-\frac{1}{2}} \bar{\mathbf {M}}_{D}^{*} \left( \mathbf {M}_{i,M}^{t*}\right) ^{-\frac{1}{2}}\big ) \left( \mathbf {M}_{i,M}^{t*}\right) ^{\frac{1}{2}}\). The proof is completed. \(\square \)
Rights and permissions
About this article

Cite this article
Kuang, Y., Tang, H. Globally Hyperbolic Moment Model of Arbitrary Order for One-Dimensional Special Relativistic Boltzmann Equation. J Stat Phys 167, 1303–1353 (2017). https://doi.org/10.1007/s10955-017-1773-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10955-017-1773-3