
Abstract
By a further study of the mechanism of the hyperbolic regularization of the moment system for the Boltzmann equation proposed in Cai et al. (Commun Math Sci 11(2):547–571, 2013), we point out that the key point is treating the time and space derivative in the same way. Based on this understanding, a uniform framework to derive globally hyperbolic moment systems from kinetic equations using an operator projection method is proposed. The framework is so concise and clear that it can be treated as an algorithm with four inputs to derive hyperbolic moment systems by routine calculations. Almost all existing globally hyperbolic moment systems can be included in the framework, as well as some new moment systems including globally hyperbolic regularized versions of Grad’s ordered moment systems and a multi-dimensional extension of the quadrature-based moment system.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Kinetic equations, such as the Boltzmann equation and the radiative transfer equation, are widely used in many different fields of applications, including rarefied gases, microflow, semi-conductor device simulation, radiative transfer, and so on. During the past decades, various solution methods have been developed to investigate kinetic equations. Among these methods, the moment method is quite attractive due to its numerous advantages [17, 18, 22], and it is regarded as a successful tool to extend classical fluid dynamics, and achieve highly accurate approximations with great efficiency.
The moment method for gas kinetic theory was first proposed by Grad [8] in 1949, and the most notable Grad’s 13 moment system is also proposed therein. In the same paper, the moment system has been carefully studied, including the characteristics, and it is not hard to observe the loss of hyperbolicity of the moment system. Later, in Ref. [17] the authors pointed out that the 1D reduction of Grad’s 13 moment system is only hyperbolic around the Maxwellian and gave the hyperbolic region. In Ref. [6] it was further revealed that for the 3D case, the moment system is not hyperbolic even in any neighbourhood of the Maxwellian. Since the hyperbolicity cannot be guaranteed for Grad’s moment method, the moment system as a quasi-linear partial differential system with Cauchy data is no longer well-posed even locally. Hence, the application of the moment method was seriously limited for a long time. However, some research in recent years brought new hope for this problem. Levermore proposed the maximum entropy method [14] in 1995, and his method yields globally hyperbolic equations but can unfortunately not be derived in analytical form for most cases. Based on the maximum entropy principle, McDonald & Torrilhon [16] proposed an approximative affordable robust version of Levermore’s 14 moment system, which is almost globally hyperbolic. A different hyperbolic approach that is tailored to special cases uses a multi-variate Pearson-IV-Distribution and was proposed by Torrilhon in [23]. Moreover, a viscous regularization has been used to regularize Grad’s moment method, e.g. [5, 9, 20], based on the order-of-magnitude approach also used in Ref. [10].
Concerning the global hyperbolicity of Grad-type moment systems, some new methods are in process. The method for the 1D Boltzmann equation introduced by Cai et al. in [1] is based on investigating the properties of the coefficient matrix of the moment system. The method therein essentially cuts off higher order terms during the derivation such that it is globally hyperbolic. Then the method is extended to the multi-dimensional case in two different ways [2, 7]. Shortly thereafter, Koellermeier proposed a quadrature-based regularization method [11]. This method deduces the moment model by computing the integrals using a suitable quadrature rule instead of exact integration. This results in a globally hyperbolic moment system very similar to the one given in Ref. [1]. The method had since been further extended to the multi-dimensional case in Ref. [13], though the resulting system is not rotational invariant. Both methods in Refs. [1, 11] have been extended to more general cases in Refs. [3, 12], respectively, which has led to a better understanding of the hyperbolicity of moment systems and the corresponding regularizations.
Based on the understanding of these new methods, in this paper we focus on a general framework to cover all of the different methods. We begin with the investigation of the globally hyperbolic moment equations (HME) proposed in Ref. [1] and point out that the key point of the regularization is treating the time and space derivative in the same way. Based on this understanding, by considering different kinds of kinetic equations, a general framework to deduce globally hyperbolic moment systems is proposed using an operator projection method. In this framework, the cut-off procedure in Ref. [3] is extended to a general operator projection and the kinetic equation under consideration can have a very generic form, including for example the Boltzmann equation, the transformed Boltzmann equation and the radiative transfer equation. A so-called internal projection strategy is introduced to make the method applicable to kinetic equations without standard form. The ansatz is chosen as a weight function multiplied by a polynomial. Based on the framework, the resulting moment system is always rotational invariant and is usually globally hyperbolic. We point out that the conditions to hyperbolicity are almost always fulfilled.
The new framework can be regarded as an algorithm to derive moment systems from kinetic equations, once the four inputs, i.e. the form of the kinetic equation, the weight function, the projection and the internal projection strategy, are given. The weight function in the ansatz space determines most of the properties of the resulting system. The choice of a suitable polynomial basis, a projection operator and an internal projection strategy provide us with a lot of freedom to achieve different moment systems. This makes it possible to derive a moment system with routine calculations and allows for easy comparison of different models. We point out that the new framework can give us most of the traditional moment systems, such as hyperbolic moment equations (HME) proposed in Refs. [1, 2, 7], the quadrature-based moment equations (QBME) [11] and Levermore’s maximum entropy method [14] for the Boltzmann equation as well as the \(P_N\) and \(M_N\) method in radiative transfer. Moreover, one can derive totally new moment systems based on the framework. We provide some examples including a hyperbolic regularization of the ordered moment hierarchy (such as 13, 26, 45 moment systems) and extend the QBME to the multi-dimensional case with the resulting moment system being rotational invariant.
The remaining part of this paper is organized as follows. Some necessary notation about projection operators is given in Sect. 2 and then we analyze the hyperbolic regularization by Cai et al. for Grad’s moment method in Sect. 3. In Sect. 4, we give the new framework with a detailed discussion. Several examples of existing moment systems derived using our new framework are given in Sect. 5. Finally, we derive some new hyperbolic regularizations with the operator projection approach in Sect. 6. The paper ends with a conclusion.
2 Preliminaries
Let \(\mathbb {R}^D\) be the D-dimensional real space. We introduce a function \(\omega \) on \(\mathbb {R}^D\), which is referred to as weight function hereafter, satisfying
where \(\varvec{x}^\alpha =\prod _{d=1}^Dx_d^{\alpha _d}\). Associated with the weight function \(\omega \), we define a weighted polynomial space \(\mathbb H^{\omega } = \mathrm {span}\left\langle \{\varvec{x}^{\alpha } \omega (\varvec{x})\}_{\alpha \in \mathbb {N}^D} \right\rangle \), which is an infinite-dimensional linear space equipped with the norm
For a positive integer \(n\in \mathbb {N}\), let \(\mathbb H^{\omega }_n\) be a closed subspace of \(\mathbb H^{\omega }\) and \(\mathrm {dim}(\mathbb H^{\omega }_n)=n+1\). We call the finite-dimensional space \(\mathbb H_n^{\omega }\) an admissible Footnote 1 subspace if
-
\(\mathrm {span}\left\langle \omega (\varvec{x})\{1, \varvec{x}, |\varvec{x}|^2\}\right\rangle \subset \mathbb H_n^{\omega }\),
-
if \(g(\varvec{x})\in \mathbb H_n^{\omega }\), then \(g(\varvec{\mathrm {Q}}\varvec{x}+\varvec{b})\in \mathbb H_n^{\omega }\), where \(\varvec{\mathrm {Q}}\) is a rotation matrix and \(\varvec{b}\) is a translation vector.
Let \(\{\phi _0, \phi _1, \ldots , \phi _k, \ldots \}\) be a basis of \(\mathbb H^{\omega }\) and \(\{\varphi _0, \varphi _1, \ldots , \varphi _n\}\) be a basis of \(\mathbb H^{\omega }_n\), respectively. Since \(\mathbb H^{\omega }_n\) is a subspace of \(\mathbb H^{\omega }\), there exists a matrix \(\mathbf{P}_b\in \mathbb {R}^{(n+1) \times \infty }\) with full row rank such that \(\varvec{\varphi } = \mathbf{P}_b\varvec{\phi }\), where \(\varvec{\phi } = (\phi _0, \phi _1, \ldots , \phi _k, \ldots )^T\) and \(\varvec{\varphi } = (\varphi _0, \varphi _1, \ldots , \varphi _n)^T\).
A linear bounded operator \(\mathcal {P}: \mathbb H^{\omega }\rightarrow \mathbb H^{\omega }\) is called a projection operator on \(\mathbb H^{\omega }_n\) if
-
\(\mathcal {P}g\in \mathbb H^{\omega }_n\) for all \(g\in \mathbb H^{\omega }\),
-
\(\mathcal {P}g=g\) for all \(g\in \mathbb H^{\omega }_n\).
For any \(g\in \mathbb H^{\omega }\), there exists \(g_i, i=0,\ldots ,\infty \) such that \(g=\sum _{i=0}^{\infty }g_i\phi _i\). Since \(\mathcal {P}g\in \mathbb H^{\omega }_n\), there exists \(\hat{g}_i,i=0,\ldots ,n\) such that \(\mathcal {P}g=\sum _{i=0}^n\hat{g}_i\varphi _i\). Since \(\mathcal {P}\) is a linear operator, there exists a unique matrix \(\mathbf{P}_p\in \mathbb {R}^{n+1\times \infty }\) satisfying \(\varvec{\hat{g}}=\mathbf{P}_p\varvec{g}\), where \(\varvec{\hat{g}}=(g_0,\ldots ,g_n)^T\) and \(\varvec{g}=(g_0,\ldots ,g_k,\ldots )^T\), such that
where \(\left\langle \cdot ,\cdot \right\rangle _{N}\) denotes the inner product of finite size vectors as opposed to \(\left\langle \cdot ,\cdot \right\rangle _{\infty }\) for infinite size vectors that will be used later. Noticing that \(\mathcal {P}\) is a linear bounded projection operator, we have
Clearly the projection operator \(\mathcal {P}\) is uniquely determined by \(\mathbf{P}_p\), thus hereafter we may directly use the matrix \(\mathbf{P}_p\) to denote the projection on the weighted polynomial space.
Particularly, for the classical orthogonal projection, i.e.
we have
Furthermore, if \(\varphi _i = \phi _i\), \(i = 0, \ldots , n\) and \((\varphi _i, \phi _j)_{\omega } = 0\) for all \(i = 0, \ldots , n\), \(j = n+1, n+2, \ldots \), then the orthogonal projection is actually a cut-off and we have
where \(\mathbf{I} _{n+1}\) is the \((n+1)\)th order identity matrix.
For later use, we note
Definition 1
(Hyperbolicity) A system of first order quasi-linear partial differential equations
is called hyperbolic in some region \(\Omega \) if and only if any linear combination of \(\varvec{\mathrm {A}}_d(\varvec{w})\) is diagonalizable with real eigenvalues for all \(\varvec{w}\in \Omega \).
3 Moment Method for Boltzmann Equation
In this section, we introduce the Boltzmann equation and then briefly review Grad’s moment system of arbitrary order proposed in Ref. [4] together with the globally hyperbolic regularization for the moment system in Refs. [1, 2]. At last, we give an alternative understanding to derive the regularized moment system.
3.1 The Boltzmann Equation
In gas kinetic theory, the motion of particles is depicted by the mass density distribution function \(f(t, \varvec{x}, \varvec{\xi })\) governed by the Boltzmann equation
where t is the time variable and \(\varvec{x}\in \mathbb {R}^D\) and \(\varvec{\xi }\in \mathbb {R}^D\) denote the position and microscopic velocity, respectively. The right hand side of (3.1) S(f) is used to model the interaction among particles and is beyond our concern, thus we do not give its concrete form and simply assume \(S(f_M(t,\varvec{x},\varvec{\xi })) = 0\). Here \(f_M(t,\varvec{x},\varvec{\xi })\) is the local Maxwellian
The macroscopic density \(\rho (t,\varvec{x})\), velocity \(\varvec{u}(t,\varvec{x})\) and temperature \(\theta (t,\varvec{x})\) are related to the distribution function \(f(t, \varvec{x}, \varvec{\xi })\) by

Multiplying the Boltzmann equation (3.1) by \((1, \varvec{\xi }, |\varvec{\xi }|^2/2)^T\) and integrating both sides over \(\mathbb {R}^D\) with respect to \(\varvec{\xi }\), we get the following conservation laws

Here \(p_{ij}\) and \(q_i\), \(i,j = 1, \ldots , D\) are pressure tensor and heat flux, respectively, defined by
3.2 Moment Method for the Boltzmann Equation
In 1949, Grad [8] assumed that the distribution function is close to a local Maxwellian and expanded the distribution function f into Hermite series to obtain the Grad 13 and Grad 20 moment systems. Cai and Li [4] extended it to more general cases and obtained arbitrary order moment systems. Here we first discuss the \(D=1\) case and the multi-dimensional case will be discussed in Sect. 5.1.
3.2.1 Grad’s Moment Method
Let \(D=1\). Following Grad, we expand the distribution function around the Maxwellian as follows
where the basis function \(\mathcal {H}^{[u, \theta ]}_{\alpha }(\xi )\) is a weighted Hermite polynomial defined as
Here we list some basic relations of the basis function \(\mathcal {H}^{[u, \theta ]}_{\alpha }(\xi )\) as following:
-
orthogonality relation: \( \left( \mathcal {H}^{[u, \theta ]}_{\alpha }(\xi ),\mathcal {H}^{[u, \theta ]}_{\beta }(\xi )\right) _{\omega ^{[u,\theta ]}} = \dfrac{\alpha !}{\theta ^\alpha }\delta _{\alpha ,\beta }; \)
-
derivative relation: \( \dfrac{\partial {\mathcal {H}^{[u, \theta ]}_{\alpha }({\xi })}}{\partial {s}}=\dfrac{\partial {u}}{\partial {s}}\mathcal {H}^{[u, \theta ]}_{\alpha +1}({\xi }) +\dfrac{1}{2}\dfrac{\partial {\theta }}{\partial {s}}\mathcal {H}^{[u, \theta ]}_{\alpha +2}({\xi }), \;~ s=t,x; \)
-
recurrence relation: \( \xi \mathcal {H}^{[u, \theta ]}_{\alpha }({\xi })=\theta \mathcal {H}^{[u, \theta ]}_{\alpha +1}(\xi )+ u\mathcal {H}^{[u, \theta ]}_{\alpha }(\xi ) + \alpha \mathcal {H}^{[u, \theta ]}_{\alpha -1}({\xi }). \)
Using the orthogonality relation, we get the constraints
Then substituting the expansion (3.2) into the Boltzmann equation (3.1), we get
Matching the coefficients of the basis functions in (3.5) and (3.6), we obtain Grad’s moment system with infinite number of equations
Here \(S_{\alpha }\) is obtained by expansion of the collision part S(f). Noticing (3.4), we let \(\varvec{w}= (f_0, u, \theta , f_3, f_4, \ldots )\), then (3.7) can be written as
where the matrices \(\varvec{\mathrm {D}}\) and \(\varvec{\mathrm {M}}\) are determined from (3.5) and (3.6) and \(\varvec{S}=(S_{\alpha })_{\alpha \in \mathbb {N}}\) is a vector with entries sorted by ascending order of \(\alpha \).
Choosing an integer \(M\ge 2\), discarding all the governing equations of \(f_{\alpha }, |\alpha |\ge M\) and dropping all the terms including the space derivative of \(f_{\alpha }, |\alpha |\ge M\), in the remaining equations, we obtain Grad’s \(M+1\) moment system in Ref. [4] for the 1D case, which can be written with modified matrices and variables as
The matrices \(\varvec{\mathrm {D}}_M\) and \((\varvec{\mathrm {M}}\varvec{\mathrm {D}})_M\) as well as \(\varvec{w}_M\) can be derived in a different way using the following procedure.
3.2.2 Decomposition of the Deduction
The procedure deriving Grad’s moment system can be decomposed into the following steps:
-
1.
Weight function and weighted polynomial space: Choose \(\omega ^{[u,\theta ]}(\xi )\) as the weight function, and let the weighted polynomial space \(\mathbb H^{\omega ^{[u,\theta ]}} =\mathrm {span}\left\langle \{\mathcal {H}^{[u, \theta ]}_{\alpha }(\xi )\}_{\alpha \in \mathbb {N}}\right\rangle \).
-
2.
Projection operator: Choose an integer \(M\ge 2\) and let \(\mathbb H^{\omega ^{[u,\theta ]}}_M= \mathrm {span}\left\langle \{\mathcal {H}^{[u, \theta ]}_{\alpha }(\xi )\}_{\alpha \le M}\right\rangle \). It is clear that the \(\mathcal {H}^{[u, \theta ]}_{\alpha }(\xi )\) form an orthogonal basis of \(\mathbb H^{\omega ^{[u,\theta ]}}\) and \(\varvec{\mathrm {P}}_b=\varvec{\mathrm {T}}\). Here Grad used a direct truncation of the distribution function, which corresponds to orthogonal projection, so we have \(\varvec{\mathrm {P}}_p=\varvec{\mathrm {T}}\).
-
3.
Grad’s expansion: Expand the distribution function in the space \(\mathbb H^{\omega ^{[u,\theta ]}}\)
$$\begin{aligned} f(t,x,\xi )=\sum _{\alpha \in \mathbb {R}}f_{\alpha }(t,x)\mathcal {H}^{[u, \theta ]}_{\alpha }(\xi ) = \left\langle \varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{f}\right\rangle _{\infty } , \end{aligned}$$where \(\left\langle \cdot ,\cdot \right\rangle _\infty \) is the inner product of infinite size vectors and \(\varvec{\mathcal {H}}^{[u,\theta ]}=(\mathcal {H}^{[u, \theta ]}_{\alpha }(\xi ))_{\alpha \in \mathbb {N}}\) and \(\varvec{f}=(f_{\alpha })_{\alpha \in \mathbb {N}}\) are vectors of elements sorted by ascending order of \(\alpha \).
-
4.
Constraints:
$$\begin{aligned} f_1=f_2=0. \end{aligned}$$(3.10)So \(\varvec{w}=(f_0, u,\theta , f_3,f_4,\ldots )\) contains all the macroscopic parameters.
-
5.
Projection 1: Project the distribution function into \(\mathbb H^{\omega ^{[u,\theta ]}}_M\):
$$\begin{aligned} \mathcal {P}f(t,x,\xi ) = \left\langle \varvec{\mathrm {P}}_b\varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {P}}_p\varvec{f}\right\rangle _{N} . \end{aligned}$$ -
6.
Time and space derivative: for \(s=t,x\)
$$\begin{aligned} \dfrac{\partial {\mathcal {P}f}}{\partial {s}}&=\left\langle \varvec{\mathrm {P}}_b\dfrac{\partial {\varvec{\mathcal {H}}^{[u,\theta ]}}}{\partial {s}},\varvec{\mathrm {P}}_p\varvec{f}\right\rangle _{N} +\left\langle \varvec{\mathrm {P}}_b\varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {P}}_p\dfrac{\partial {\varvec{f}}}{\partial {s}}\right\rangle _{N} \nonumber \\&=\left\langle \varvec{\mathrm {P}}_b\varvec{\mathrm {C}}\varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {P}}_p\varvec{f}\right\rangle _{N} +\left\langle \varvec{\mathrm {P}}_b\varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {P}}_p\dfrac{\partial {\varvec{f}}}{\partial {s}}\right\rangle _{N} \nonumber \\&=\left\langle \varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {C}}^T\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\varvec{f}+\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\dfrac{\partial {\varvec{f}}}{\partial {s}}\right\rangle _{\infty } =\left\langle \varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {s}}\right\rangle _{\infty } . \end{aligned}$$(3.11)Here \(\varvec{\mathrm {C}}\) is a matrix with infinite size and can be deduced directly from the derivative relation of the basis functions. The first \(M+1\) rows of the matrix \(\varvec{\mathrm {D}}\) can be derived from \(\varvec{\mathrm {C}}^T\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\varvec{f}+\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\dfrac{\partial {\varvec{f}}}{\partial {s}}\) and \(\varvec{\mathrm {D}}\) is the same as in (3.8).
-
7.
Multiplication with velocity:
$$\begin{aligned} \xi \dfrac{\partial {\mathcal {P}f}}{\partial {x}}&=\left\langle \xi \varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x}}\right\rangle _{\infty } =\left\langle \varvec{\mathrm {M}}^T\varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x}}\right\rangle _{\infty } \nonumber \\&=\left\langle \varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {M}}\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x}}\right\rangle _{\infty }. \end{aligned}$$(3.12)The matrix \(\varvec{\mathrm {M}}\) can be derived directly from the recurrence relation of the basis functions and is the same as in (3.8).
-
8.
Projection 2: Project (3.11) and (3.12) into the space \(\mathbb H^{\omega ^{[\theta ]}}_M\) and match the coefficients of the basis functions to obtain the moment system:
$$\begin{aligned} \varvec{\mathrm {P}}_p\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {t}}+\varvec{\mathrm {P}}_p\varvec{\mathrm {M}}\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x}}=\varvec{\mathrm {P}}_p\varvec{S}. \end{aligned}$$(3.13)This finally yields Grad’s \(M+1\) moment system.
Comparing (3.13) and (3.8), we observe that Grad’s truncation and closure are corresponding to the projection on the distribution function and the moment system. Actually, we can also first obtain system (3.8) and then let
to get (3.9), which is exactly the same as (3.13).
Note, that we do not explicitly write down the matrices \(\varvec{\mathrm {D}}\) and \(\varvec{\mathrm {M}}\) here in order to shorten notation, but some examples for different cases are given in Sect. 5.
3.3 Globally Hyperbolic Moment Equations
The hyperbolicity of system (3.13) requires \(\varvec{\mathrm {D}}_M\) to be invertible and \(\varvec{\mathrm {D}}_M^{-1}(\varvec{\mathrm {M}}\varvec{\mathrm {D}})_M\) to be real diagonalizable. It is easy to check that \(\varvec{\mathrm {D}}_M\) is invertible, since \(\varvec{\mathrm {D}}_M\) is a lower triangular matrix and its diagonal entries are all nonzero. However, in Ref. [1] Cai et al. investigated the hyperbolicity of it and concluded that for \(M\ge 3\) Grad’s moment system (3.13) is only hyperbolic around the Maxwellian. A globally hyperbolic regularization for Grad’s moment system in 1D was proposed afterwards. In [3], Cai et al. investigated the regularization and gave an explanation from the viewpoint of the discrete velocity method and based on the regularization, a generalized framework was proposed to obtain a hyperbolic moment system based on any ansatz for the kinetic equation. In this subsection, we use a diagram of the regularization proposed in Ref. [1] to compare the treatments of time and space derivatives for Grad’s moment system and the regularization.
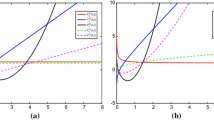
To derive Grad’s moment equation, we need to calculate the time derivative \(\dfrac{\partial {f}}{\partial {t}}\) and the convection term \(\xi \dfrac{\partial {f}}{\partial {x}}\). As shown in Fig. 1, for the time derivative, the projection operator directly acts on \(\dfrac{\partial {\mathcal {P}f}}{\partial {t}}\) after the time derivative. But for the convection term, the projection operator acts on \(\dfrac{\partial {\mathcal {P}f}}{\partial {x}}\) after multiplying with the velocity. That means Grad treated the time and space derivative in different ways. In the perspective of physics, if only the convection term is considered in the Boltzmann equation, the system is time reversal invariant, thus there is no essential difference for time and space. Hence, it is natural to use the same treatment for time derivative and space derivative. In the perspective of mathematics, the same treatment for time and space derivatives indicates that the hyperbolicity of the resulting moment system only depends on the operator representing the multiplication with velocity and the hyperbolicity does not depend on the derivative operator, since similarity transformation preserves the matrix eigenstructure. In fact, the hyperbolicity of the Boltzmann equation can be expanded since the multiplication operator \(\xi \cdot \) is real-valued, symmetric, and does not depend on the time and space derivatives. In conclusion, it is a natural choice to use the same treatment for the time and space derivatives, as is shown in Fig. 2, which results in the regularization proposed by Cai et al. in [1]. Based on the perspective in Fig. 2, the derivation of the regularized moment system in Ref. [1] can be written as
1.-6. the same as the 1st–6th step in Sect. 3.2.2.

Diagram for Grad’s moment method for the 1D Boltzmann equation

Diagram for the regularization proposed in Reference [1] for the 1D Boltzmann equation
-
7.
Projection 2: Project the space derivative (3.11) into space \(\mathbb H^{\omega ^{[\theta ]}}_M\)
$$\begin{aligned} \mathcal {P}\dfrac{\partial {\mathcal {P}f}}{\partial {x}}=\left\langle \varvec{\mathrm {P}}_b\varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {P}}_p\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x}}\right\rangle _{N} . \end{aligned}$$ -
8.
Multiplication with velocity:
$$\begin{aligned} \xi \mathcal {P}\dfrac{\partial {\mathcal {P}f}}{\partial {x}}&=\left\langle \varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {M}}\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x}}\right\rangle _{\infty }. \end{aligned}$$(3.14) -
9.
Projection 3: Project (3.11) and (3.14) into the space \(\mathbb H^{\omega ^{[\theta ]}}_M\) and match the coefficients of the basis functions to obtain the regularized moment system:
$$\begin{aligned} \varvec{\mathrm {P}}_p\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {t}}+\varvec{\mathrm {P}}_p\varvec{\mathrm {M}}\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x}}=\varvec{\mathrm {P}}_p\varvec{S}. \end{aligned}$$(3.15)This finally yields the globally hyperbolic moment equations proposed in Ref. [1].
Similar to Grad’s moment system, we can first obtain system (3.8) and then let
to get
The upper system is exactly the same as (3.15). That means we can derive the moment system with infinite equations first without considering the projection and then apply the projection to it to obtain the corresponding equations. This observation will help us to understand the difference between Grad’s 13 moment system and Grad’s 20 moment system, as well as the regularized versions of them.
4 Generic Kinetic Equations
In the last section, we investigated the regularized moment system proposed in Ref. [1]. In this section, we deduce and summarize the characteristic of the regularization and extend it to a framework. Based on the framework, different moment systems can be derived by some routine calculations once the kinetic equation, the weight function, the projection and the internal projection strategy are given and new moment systems can be derived without essential difficulty. The framework will be introduced step by step in this section. First, we clarify the form of the kinetic equation.
4.1 The Form of the Kinetic Equation
It is natural to determine the kinetic equation before deducing the moment system. We want to cover different kinetic equations in our framework and thus assume the following form of the kinetic equation
where \(f=f(t,\varvec{x},\varvec{v})\), \(\varvec{\eta }_1=\varvec{\eta }_1(t,\varvec{x})\) is a vector of macroscopic parametersFootnote 2 and \(\mathcal {L}\left( \dfrac{\partial {}}{\partial {s}};\cdot ,\cdot ,\cdot \right) \), for \(s=t,x_d\) is an operator. Furthermore \(\varvec{v}(\varvec{\xi })\) is a function of \(\varvec{\xi }\) and \(p_d(\cdot )\) is a polynomial, which suffices to cover all major models. Among others, the following important models are readily included in our framework:
-
Conventional Boltzmann equation (3.1): The standard Boltzmann equation is easily included in the framework by setting
$$\begin{aligned} \varvec{\eta }_1=\emptyset ,\quad \varvec{v}(\varvec{\xi })=\varvec{\xi },\quad p_d(\varvec{v})=v_d,\quad \mathcal {L}\left( \dfrac{\partial {}}{\partial {s}};f, \varvec{\eta }_1, \varvec{v}(\varvec{\xi })\right) =\dfrac{\partial {f}}{\partial {s}}, \; s=t,x_d. \end{aligned}$$ -
Scaled Boltzmann equation used in Ref. [12]: A transformed Boltzmann equation is obtained after shifting the microscopic velocity \(\varvec{\xi }\) by its macroscopic velocity \(\varvec{u}\) and scaling by the standard deviation \(\sqrt{\theta }\) to get a Galilean invariant variable transformation:
$$\begin{aligned} \varvec{\xi }\rightarrow \frac{\varvec{\xi }-\varvec{u}}{\sqrt{\theta }}=:\varvec{v}. \end{aligned}$$With this transformation, the Boltzmann equation (3.1) is transformed to
$$\begin{aligned}&\dfrac{\mathrm {D} {f}}{\mathrm {D} {t}}+\sum _{d=1}^D\sqrt{\theta }v_d\dfrac{\partial {f}}{\partial {x_d}} +\sum _{k=1}^D\dfrac{\partial {f}}{\partial {v_k}} \left( -\frac{1}{\sqrt{\theta }}\left( \dfrac{\mathrm {D} {u_k}}{\mathrm {D} {t}}+\sum _{d=1}^D\sqrt{\theta }v_d\dfrac{\partial {u_k}}{\partial {x_d}} \right) \right. \nonumber \\&\qquad \left. -\frac{1}{2\theta }v_k\left( \dfrac{\mathrm {D} {\theta }}{\mathrm {D} {t}}+\sum _{d=1}^D\sqrt{\theta }v_d\dfrac{\partial {\theta }}{\partial {x_d}} \right) \right) =S(f), \end{aligned}$$(4.2)where the material derivative \(\dfrac{\mathrm {D} {}}{\mathrm {D} {t}}:=\dfrac{\partial {}}{\partial {t}}+\sum _{d=1}^Du_d\dfrac{\partial {}}{\partial {x_d}}\) is used. In physical perspective, (4.2) and (3.1) depict the same physical process. In mathematical perspective, however, we treat the two equations as different models. We can include the transformed Boltzmann equation (4.2) in our framework by setting
$$\begin{aligned} \begin{aligned} \varvec{\eta }_1&=(u_1,\ldots ,u_D,\theta ),\quad \varvec{v}(\varvec{\xi })=\frac{\varvec{\xi }-\varvec{u}}{\sqrt{\theta }},\quad p_d(\varvec{v})=u_d+\sqrt{\theta }v_d,\quad \\ \mathcal {L}\left( \dfrac{\partial {}}{\partial {s}};f, \varvec{\eta }_1, \varvec{v}(\varvec{\xi }) \right)&=\dfrac{\partial {f}}{\partial {s}}-\sum _{k=1}^D\dfrac{\partial {f}}{\partial {v_k}} \left( \frac{1}{\sqrt{\theta }}\dfrac{\partial {u_k}}{\partial {s}} +\frac{1}{2\theta }v_k\dfrac{\partial {\theta }}{\partial {s}} \right) ,\; s=t, x_d. \end{aligned} \end{aligned}$$ -
Radiative transfer equation: The radiative transfer equation reads
$$\begin{aligned} \frac{1}{c}\dfrac{\partial {f}}{\partial {t}}+\varvec{v}(\varvec{\xi })\cdot \nabla f=S(f;T), \end{aligned}$$(4.3)where c is the speed of light and S(f; T) models interactions between photons and the background medium with material temperature T and \(\varvec{v}(\varvec{\xi })=\varvec{\xi }/|\varvec{\xi }|\). The radiative transfer equation (4.3) is included in the framework by setting
$$\begin{aligned} \varvec{\eta }_1=\emptyset ,\quad \varvec{v}(\varvec{\xi })=\varvec{\xi }/|\varvec{\xi }|,\quad p_d(\varvec{v})=c v_d,\quad \mathcal {L}\left( \dfrac{\partial {}}{\partial {s}}; f, \varvec{\eta }_1, \varvec{v}(\varvec{\xi })\right) =\frac{1}{c}\dfrac{\partial {f}}{\partial {s}},\; s=t,x_d. \end{aligned}$$
In this paper, we are not confined to the upper three cases, but consider any kinetic equation of the form as (4.1).
4.2 The Framework of Model Reduction
Based on the form of the kinetic equation (4.1), we give a framework to derive a moment system from the kinetic equation.
-
1.
Weight function and weighted polynomial space: Denote the weight function by \(\omega ^{[\varvec{\eta }_2]}(\varvec{v})\), where \(\varvec{\eta }_2=\varvec{\eta }_2(t,\varvec{x})\) is a set of some macroscopic parameters. Then the weighted polynomial space is \(\mathbb H^{\omega ^{[\varvec{\eta }_2]}} =\mathrm {span}\left\langle \{\omega ^{[\varvec{\eta }_2]}(\varvec{v})\varvec{v}^\alpha \}_{\alpha \in \mathbb {N}^D}\right\rangle \), and let \(\varvec{\phi }=(\phi _0,\phi _1,\ldots ,)^T\) be a basis.
-
2.
Projection operator: Choose an admissible subspace \(\mathbb H^{\omega ^{[\varvec{\eta }_2]}}_{sub}\) of \(\mathbb H^{\omega ^{[\varvec{\eta }_2]}}\) and determine the projection \(\mathcal {P}\), which means determining the two matrices \(\varvec{\mathrm {P}}_b\) and \(\varvec{\mathrm {P}}_p\).
-
3.
Ansatz: Expand the distribution function \(f(t,\varvec{x},\varvec{v})\) in the space \(\mathbb H^{\omega ^{[\varvec{\eta }_2]}}\)
$$\begin{aligned} f(t,\varvec{x},\varvec{v})=\sum _{\alpha \in \mathbb {N}^D}f_{\alpha }(t,\varvec{x})\phi _{\alpha }(\varvec{v}) =\left\langle \varvec{\phi }, \varvec{f}\right\rangle _{\infty } . \end{aligned}$$(4.4) -
4.
Constraints: Denote \(\varvec{\eta }=\varvec{\eta }_1\cup \varvec{\eta }_2\) and let n be the cardinality of \(\varvec{\eta }\). Then there must be n independent relations between \(\varvec{\eta }\) and \(\varvec{f}\)
$$\begin{aligned} r_j(\varvec{\eta },\varvec{f})=0,\quad j=1,\ldots ,n. \end{aligned}$$(4.5)Using (4.5) to eliminate n parameters in \(\varvec{\eta }, \varvec{f}\), we denote the remaining by \(\varvec{w}\).
-
5.
Projection 1: Project the distribution function into the space \(\mathbb H^{\omega ^{[\varvec{\eta }_2]}}_{sub}\)
$$\begin{aligned} \mathcal {P}f(t,\varvec{x},\varvec{v})=\left\langle \varvec{\mathrm {P}}_b\varvec{\phi },\varvec{\mathrm {P}}_p\varvec{f}\right\rangle _{N} . \end{aligned}$$(4.6) -
6.
Time and space derivative: For \(s=t, x_d\), calculate \(\mathcal {L}\left( \dfrac{\partial {}}{\partial {s}},\ldots \right) \) with an internal projection strategy \(PS_1\)
$$\begin{aligned} \mathcal {L}\left( \dfrac{\partial {}}{\partial {s}},\ldots \right) \rightarrow \mathcal {L}^{PS_1}\left( \dfrac{\partial {}}{\partial {s}},\ldots \right) =\left\langle \varvec{\phi }, \varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {s}}\right\rangle _{\infty } , \end{aligned}$$(4.7)where \(\varvec{\mathrm {D}}_{PS_1}\) depends on \(\mathcal {L}\left( \dfrac{\partial {}}{\partial {s}},\ldots \right) \) and the internal projection strategy. In deriving \(\varvec{\mathrm {D}}_{PS_1}\), the projection may be used, and Sect. 5.5 gives an example.
-
7.
Projection 2: Project the resulting time and space derivative into the space \(\mathbb H^{\omega ^{[\varvec{\eta }_2]}}_{sub}\)
$$\begin{aligned} \mathcal {P}\mathcal {L}^{PS_1}\left( \dfrac{\partial {}}{\partial {s}},\ldots \right) = \left\langle \varvec{\mathrm {P}}_b\varvec{\phi }, \varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {s}}\right\rangle _{N} . \end{aligned}$$(4.8) -
8.
Multiplication with velocity: For \(d=1,\ldots ,D\), calculate \(p_d(\varvec{v})\mathcal {P}\mathcal {L}^{PS_1}\left( \dfrac{\partial {}}{\partial {s}},\ldots \right) \) with an internal projection strategy \(PS_2\)
$$\begin{aligned} p_d(\varvec{v})\mathcal {P}\mathcal {L}^{PS_1}\left( \dfrac{\partial {}}{\partial {s}},\ldots \right) \rightarrow \left\langle \varvec{\phi },\varvec{\mathrm {M}}_{d,l}\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\ldots \varvec{\mathrm {M}}_{d,1}\varvec{\mathrm {P}}_b^T\cdot \varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T \dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x_d}}\right\rangle _{\infty } , \end{aligned}$$(4.9)where l is a positive integer and \(\varvec{\mathrm {M}}_{d,i}\), \(i=1,\ldots ,l\) are matrices depending on \(p_d(\varvec{v})\varvec{\phi }\) and the internal projection strategy. See Remark 1 for details of the upper equations and the internal projection strategy \(PS_2\). In the following we use \(\varvec{\mathrm {M}}_{d,PS_2}\) to denote \(\varvec{\mathrm {M}}_{d,l}\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\ldots \varvec{\mathrm {M}}_{d,1}\).
-
9.
Projection 3: Project (4.9) into the space \(\mathbb H^{\omega ^{[\varvec{\eta }_2]}}_{sub}\) and match the coefficients of basis functions \(\varvec{\phi }\), then obtain the moment system
$$\begin{aligned}&\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {t}} +\sum _{d=1}^D \varvec{\mathrm {P}}_p\varvec{\mathrm {M}}_{d,PS_2}\varvec{\mathrm {P}}_b^T \varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x_d}} =\varvec{\mathrm {P}}_p\varvec{S}, \end{aligned}$$(4.10)where \(\varvec{S}\) is obtained by expansion of the collision part S(f), which is not studied in this paper.
Remark 1
In the procedure of multiplying velocity, there may be several operations involved. As an example we consider \(p_d(\varvec{v})=v_d^2\) and we denote the matrix \(\varvec{\mathrm {M}}_d\) satisfying \(v_d\varvec{\phi }=\varvec{\mathrm {M}}^T_d\varvec{\phi }\), then \(p_d\varvec{\phi }=v_d(v_d\varvec{\phi })=v_d\varvec{\mathrm {M}}_d^T\varvec{\phi }=\varvec{\mathrm {M}}_d^T\varvec{\mathrm {M}}_d^T\varvec{\phi }\). Thus, we have two choices for the multiplication with velocity:
-
1.
First compute \(v_d\varvec{\phi }\) and apply a projection, then perform the other multiplication with velocity. This corresponds to \(l=2\) and \(\varvec{\mathrm {M}}_{d,1}=\varvec{\mathrm {M}}_{d,2}=\varvec{\mathrm {M}}_d\).
-
2.
Directly compute \(v_d^2\varvec{\phi }\). This corresponds to \(l=1\) and \(\varvec{\mathrm {M}}_{d,1}=\varvec{\mathrm {M}}_d^2\).
If \(p_d(\varvec{v})\) is more complex, there are more choices. We call each choice an internal projection strategy \(PS_2\). Naturally, different choices usually yield different moment systems. Here we consider the case where \(p_d(\varvec{v})\) can be factorized as \(p_d(\varvec{v})=\prod _{i=1}^lp_d^{(i)}(\varvec{v})\), then \(\varvec{\mathrm {M}}_{d,i}\) satisfies \(p_d(\varvec{v})\varvec{\phi }=\varvec{\mathrm {M}}_{d,i}^T\varvec{\phi }\). Similarly, in the procedure of calculating time and space derivative, there may be several operations, which result in several choices to calculating time and space derivative. We call each choice an internal projection strategy \(PS_1\), respectively.
Remark 2
In the framework, it is assumed that \(\varvec{\mathrm {P}}_p\) is commutative with the time and space derivative, which means \(\varvec{\mathrm {P}}_p\) is independent of \(\varvec{\eta }_1\). Actually, if \(\mathcal {P}\) is an orthogonal projection and the basis function is an orthogonal basis, this assumption is always valid.
Besides, the “derivative” matrix \(\varvec{\mathrm {D}}_{PS_1}\) usually depends on the variables \(\varvec{w}\), e.g. \(\varvec{\mathrm {D}}_{PS_1}=\varvec{\mathrm {D}}_{PS_1}(\varvec{w})\). After projection, the matrix \(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\) must depend only on the projected variables \(\varvec{\mathrm {P}}_p\varvec{w}\) due to the moment closure. Actually, we implicitly used the condition: \(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T=\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}(\varvec{\mathrm {P}}_b\varvec{\mathrm {P}}_p\varvec{w})\varvec{\mathrm {P}}_b^T\). Similarly, \(\varvec{\mathrm {P}}_p\varvec{\mathrm {M}}_{d,PS_2}\varvec{\mathrm {P}}_b^T=\varvec{\mathrm {P}}_p\varvec{\mathrm {M}}_{d,PS_2}(\varvec{\mathrm {P}}_b\varvec{\mathrm {P}}_p\varvec{w})\varvec{\mathrm {P}}_b^T\) and \(\varvec{\mathrm {P}}_p\varvec{S}=\varvec{\mathrm {P}}_p\varvec{S}(\varvec{\mathrm {P}}_b\varvec{\mathrm {P}}_p\varvec{w})\).
4.3 Discussion on the Framework
Actually, the framework in Sect. 4.2 almost provides an algorithm to derive moment systems from kinetic equation. In this subsection, we dissect the procedure in detail and study the inputs and properties of the resulting moment system.
4.3.1 Inputs
Taking a closer look at the framework in Sect. 4.2, we find that once the weight function is given, the weighted polynomial space \(\mathbb H^{\omega ^{[\varvec{\eta }_2]}}\) is determined and the ansatz and constraints in the 3rd and 4th step of the framework are also decided. Once the projection operator \(\mathcal {P}\) is given, all the projections in the 5th, 7th and 9th step are fixed. For the calculations of the time and space derivative and the multiplication with velocity, only the internal projection strategy affects the result. Hence, to derive a moment system based on the framework in Sect. 4.2, the following information is needed:
-
A kinetic equation of the form as in (4.1);
-
Weight function;
-
Projection operator;
-
Internal projection strategies \(PS_1\) and \(PS_2\).
As discussed in Sect. 4.1, the form of the kinetic equation implicates the treatment of the kinetic equation.
The weight function represents some knowledge of the distribution function. Grad used the Maxwellian as the weight function because he assumed the distribution function is not far away from the Maxwellian. In Ref. [7], in order to deal with the anisotropic distribution function of the Boltzmann equation, Fan and Li used a more general Gaussian function as the weight function. Hence, it is possible to include some prior knowledge of the distribution function in the weight function, to derive specific moment systems for some specific questions.
The projection operator largely influences the type of the moment system. For the conventional Boltzmann equation and the Maxwellian as the weight function, one projection operator may yield the regularized version of Grad’s 13 moment system (G13) while another one may yield the regularized version of Grad’s 20 moment system (G20). Even if all the upper three inputs are given, it is possible to obtain different moment system with different internal projection strategies. So the internal projection strategy offers some freedom.
As we will see in the later examples and applications, the projection operators can for example correspond to a truncation or a cut-off during the computation of the moment system. This will be most obvious in case of HME and QBME, which are very similar in this new framework. The operator projection framework thus also yields a mathematically precise method to describe the procedures of these different approaches in a unified way.
Summarized, the form of the kinetic equation implicates the treatment of the kinetic equation. The weight function represents some knowledge of the distribution function and allows us to include a-priori information of the distribution function in the moment system. The projection operator and internal projection strategy determine which type of moment system we need and leave us some freedom for the moment system. Once the four inputs are given, the moment system can be mechanically derived following the framework.
4.3.2 Pragmatic Viewpoint
As discussed in the last part of Sect. 3.3, the internal projection strategy vanishes if we do not apply any projection in the framework, which is identical to setting \(\varvec{\mathrm {P}}_b=\varvec{\mathrm {P}}_p=\varvec{{I}}\). The resulting moment system then reads
Actually, to derive (4.10), we can first neglect the projection operators and obtain (4.11), then afterwards perform the projections, which can be treated as using \(\varvec{\mathrm {P}}_p\varvec{w}\) and \(\varvec{\mathrm {P}}_p\varvec{S}\) to take the place of \(\varvec{w}\) and \(\varvec{S}\), respectively, and use \(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\) and \(\varvec{\mathrm {P}}_p\varvec{\mathrm {M}}_d\varvec{\mathrm {P}}_b^T\) to take the place of \(\varvec{\mathrm {D}}\) and \(\varvec{\mathrm {M}}_d\). This allows us to choose the weight function first, and then obtain the moment system containing infinite equations, and finally to determine the projection.
As emphasized in Sect. 3.3, we note that it is essential to treat time and space derivative in the same way, which corresponds to the same internal projection strategy \(PS_1\) for time and space derivative. This is essential for the hyperbolicity of the moment system. Using the same internal projection strategy \(PS_2\) for \(\varvec{\mathrm {M}}_{d,i}\) for different directions \(x_d\) is also obligatory, which corresponds to the rotational invariance of the resulting moment system. Precisely, the resulting moment system is always Galilean invariant, since the subspace is admissible.
4.3.3 Hyperbolicity of the Reduced Models
According to the definition of hyperbolicity, the moment system (4.10) is hyperbolic if
-
1.
\(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\), is invertible;
-
2.
Any linear combination of \(\varvec{\mathrm {P}}_p\varvec{\mathrm {M}}_{d,PS_2}\varvec{\mathrm {P}}_b^T\) is diagonalizable with real eigenvalues.
To study the matrix \(\varvec{\mathrm {P}}_p\varvec{\mathrm {M}}_{d,PS_2}\varvec{\mathrm {P}}_b^T\), we denote \(\{\tilde{\varphi }_0,\tilde{\varphi }_1,\ldots ,\tilde{\varphi }_{N-1}\}\) orthonormal basis of the N-dimensional space \(\mathbb H_{sub}^{\omega }\), satisfying \( (\tilde{\varphi }_i,\tilde{\varphi }_j)_{\omega }=\delta _{i,j},\; i,j=0,\ldots ,N-1, \) and denote \(\{\tilde{\phi }_0,\ldots ,\tilde{\phi }_n,\ldots \}\) as orthonormal basis of \(\mathbb H^{\omega }\) with \(\tilde{\phi }_i=\tilde{\varphi }_i, i=0,\ldots ,N-1\) and \((\tilde{\phi }_i,\tilde{\phi }_j)_{\omega }=\delta _{i,j}, i,j\in \mathbb {N}\), where \(\tilde{\phi }\) is dependent on \(\varvec{\eta }_2\). Then there exists a non-singular matrix \(\varvec{\mathrm {Q}}\) such that \(\varvec{{\varphi }}=\varvec{\mathrm {Q}}^T\varvec{\tilde{\varphi }}\). In the new basis, we denote \(\varvec{{\tilde{\mathrm {P}}}}_p\), \(\varvec{{\tilde{\mathrm {P}}}}_b\), \(\tilde{\varvec{\mathrm {D}}}_{PS_1}\), \(\tilde{\varvec{\mathrm {M}}}_{d,PS_2}\), \(\tilde{\varvec{\mathrm {M}}}_{d,k}, k=1,\ldots ,l\) and \(\tilde{\varvec{w}}\) with the same definitions as the symbols without the \(\tilde{\dot{}}\). Then the resulting moment system can be written as
Hence, we have
Since \(\tilde{\varvec{\mathrm {M}}}_{d,k}\), \(k=1,\ldots ,l\) is defined by \(p_d^{(k)}(\varvec{v})\tilde{\varvec{\phi }}=\tilde{\varvec{\mathrm {M}}}_{d,k}\tilde{\varvec{\phi }}\), and \(\tilde{\varvec{\phi }}\) is an orthonormal basis, we have
With (4.13) and (4.14), we immediately get the following criterion on the real diagonalizability of \(\varvec{\mathrm {P}}_p\varvec{\mathrm {M}}_{d,PS_2}\varvec{\mathrm {P}}_b^T\).
Theorem 1
If the projection operator \(\mathcal {P}\) is an orthogonal projection, and \(p_d^{(k)}(\varvec{v})\), \(k=1,\ldots ,l\) satisfy \(p_d^{(k)}(\varvec{v})=p_d^{(l+1-k)}(\varvec{v})\), then any linear combination of \(\varvec{\mathrm {P}}_p\varvec{\mathrm {M}}_{d,PS_2}\varvec{\mathrm {P}}_b^T\) is diagonalizable with real eigenvalues.
Proof
As \(\mathcal {P}\) is an orthogonal projection, we have \(\varvec{{\tilde{\mathrm {P}}}}_p=\varvec{{\tilde{\mathrm {P}}}}_b=\varvec{\mathrm {T}}\). Since
\(\tilde{\varvec{\mathrm {M}}}_{d,k}\) and \(\varvec{\mathrm {P}}_p\tilde{\varvec{\mathrm {M}}}_{d,k}\varvec{\mathrm {P}}_b^T\) are symmetric matrices. Due to \(p_d^{(k)}(\varvec{v})=p_d^{(l+1-k)}(\varvec{v})\), we have \(\tilde{\varvec{\mathrm {M}}}_{d,k}=\tilde{\varvec{\mathrm {M}}}_{d,l+1-k}\), and further \(\varvec{{\tilde{\mathrm {P}}}}_p\tilde{\varvec{\mathrm {M}}}_{d,PS_2}\varvec{{\tilde{\mathrm {P}}}}_b^T=\varvec{{\tilde{\mathrm {P}}}}_p\tilde{\varvec{\mathrm {M}}}_{d,l}\varvec{{\tilde{\mathrm {P}}}}_b\ldots \varvec{{\tilde{\mathrm {P}}}}_p\tilde{\varvec{\mathrm {M}}}_{d,1}\varvec{{\tilde{\mathrm {P}}}}_b\), \(d=1,\ldots ,D\) are symmetric matrices. Hence, any linear combination of \(\varvec{{\tilde{\mathrm {P}}}}_p\tilde{\varvec{\mathrm {M}}}_{d,PS_2}\varvec{{\tilde{\mathrm {P}}}}_b^T\) is diagonalizable with real eigenvalues. (4.13) indicates the conclusion of the theorem is valid. \(\square \)
In practice, to derive moment equations, we most often use an orthogonal projection since it corresponds to the “cut-off”. Thus the condition on the projection is almost satisfied. For almost all kinetic equations, \(p_d(\varvec{v})\) is a linear polynomial. Even for some complex \(p_d(\varvec{v})\), using some complex internal projection strategy is not usual. Hence, the condition on \(p_d(\varvec{v})\) is easy to fulfill. So the model (4.10) is globally hyperbolic for most situations, only if the matrix \(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\) is invertible.
Next we consider the matrix \(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\). In this framework, \(\varvec{\mathrm {P}}_p\varvec{w}\) can be seen as the parameters to construct a distribution function \(\mathcal {P}f(\varvec{w}; \varvec{\xi })\) in \(\mathbb H_{sub}^{\omega }\) to approximate the solution of the kinetic equation. Generally, it is not permitted that two different \(\varvec{w}\) correspond to one distribution function or one operator \(\mathcal {L}\left( \dfrac{\partial {}}{\partial {s}};\ldots \right) \), i.e.

Hence, if the operator \(\mathcal {L}\left( \dfrac{\partial {}}{\partial {s}};\ldots \right) \) and the weight function \(\omega \) are not singular for some \(\varvec{w}\), \(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\) is general invertible.
Before we end this section, we would like to point out that the framework proposed in this section provides a general model reduction strategy from kinetic equation to moment equations. The framework is so concise that we need only routine calculations to obtain a usually globally hyperbolic moment system. But we also need to point out whether the moment system is easy to implement or not usually depends on whether the coefficients of the system are explicit or tractable, which are significantly up to the ansatz. We will give several examples, e.g. Sects. 5.1, 5.2, 5.3, 5.5 to show the coefficients of the moment system are usually explicit and tractable, while the example Levermore’s maximum entropy in Sect. 5.4 shows an opposite side.
5 Previous Models
An advantage of the framework is its applicability. Almost all the traditional moment systems can be derived from the framework. In this section, we will give several examples of moment systems for the Boltzmann equation and the radiative transfer equation derived using the operator projection framework, before we also show an example with varying projection operators.
5.1 Hyperbolic Moment Equations
In Sect. 3, Grad’s moment system for the 1D Boltzmann equation is studied in detail, and the globally hyperbolic regularization, proposed in Ref. [1], is investigated. Now, we study the multi-dimensional case. Grad’s moment system of arbitrary order is first proposed in Refs. [4] and [2] the authors investigated the hyperbolicity of it and concluded that the moment system with order greater than 3 is not globally hyperbolic. A globally hyperbolic regularization for it is proposed in that paper, and here we call the resulting moment system the hyperbolic moment equations HME).
For HME, the kinetic equation is the conventional Boltzmann equation (3.1), i.e.
The weight function is a scaled Maxwellian
Then the orthogonal weighted polynomials are defined by
which form a basis function of \(\mathbb H^{\omega ^{[\varvec{u},\theta ]}}\). We have \(\varvec{\eta }=\{\varvec{u},\theta \}\), and some calculations yield the constrain
Hence, we use \(u_i\) to replace \(f_{e_i}\) and \(\theta /2\) to replace \(f_{2e_1}\) in \(\varvec{f}\), then set the resulting vector as \(\varvec{w}\). For convenience, we denote the consecutive number of \(f_{\alpha }\) in \(\varvec{f}\) as \(\mathcal {N}(\alpha )\).
We choose a positive integer \(M\ge 2\), the subspace is then defined as \(\mathbb H_{sub}^{\omega ^{[\varvec{u},\theta ]}}= \mathrm {span}\left\langle \left\{ \mathcal {H}^{[\varvec{u}, \theta ]}_{\alpha }(\varvec{\xi })\right\} _{|\alpha |\le M} \right\rangle \), which is an admissible subspace. The projection operator is chosen as the orthogonal projection, i.e. \(\varvec{\mathrm {P}}_b=\varvec{\mathrm {P}}_p=\varvec{\mathrm {T}}\). Since \(p_d(\varvec{v})\) is a linear polynomial and \(\mathcal {L}_s\) is only a simple derivative, the projection strategy vanishes.
With these inputs, we start to derive the moment system. Since
the matrix \(\varvec{\mathrm {D}}=(d_{ij})\) satisfies
and all entries not defined above are zeros. It is easy to observe that \(\varvec{\mathrm {D}}\) is a block lower triangular matrix, and only the diagonal block corresponding to rows and columns from \(\mathcal {N}(2e_1)\) to \(\mathcal {N}(2e_D)\) is a big block, the others are all \(1\times 1\) blocks and the entry of the block is nonzero. Hence, we just need to study the big block, and denote it by \(\varvec{\mathrm {D}}_{\theta }\). For convenience, we just study the case \(D=2\), and it is easy to extend it to the general case. Then
so the matrix \(\varvec{\mathrm {D}}\) is invertible.
The property of Hermite polynomials give
which indicates the form of the matrix \(\varvec{\mathrm {M}}_d\). Since the projection \(\mathcal {P}\) is an orthogonal projection and \(p_d(\varvec{v})\) is a linear polynomial, Theorem 1 indicates the system
is hyperbolic. We point out that if we do not perform the projection before multiplying with the velocity, the resulting moment system turns into
which is Grad’s moment system in Ref. NRxx.
5.2 Anisotropic Hyperbolic Moment Equations
HME uses one temperature in the weight function and treats different directions in the same way. For some anisotropic distribution functions, for example \(f=\frac{\rho }{a(\pi )^{3/2}}\exp \Big ( -\frac{\xi _1^2}{a^2}-\xi _2^2-\xi _3^2 \Big )\), where a is positive constant, if a is far from 1, HME cannot capture this well or even fails to work. In [7], Fan and Li use a Gaussian rather than a Maxwellian as the weight function and derive an anisotropic hyperbolic moment equations AHME). Next, we give a concise derivation of it in our newly proposed framework.
The main difference of AHME from HME is its weight function. Here we use a Gaussian
where \(\Theta =(\theta _{ij})_{D\times D}\), and \(\theta _{ij}=p_{ij}/\rho \). The definition of \(p_{ij}\) indicates the matrix \(\Theta \) is positive definite. With the weight function, we define the generalized Hermite polynomials
which are basis functions of \(\mathbb H^{\omega ^{[\varvec{u},\Theta ]}}\) and \(\varvec{\eta }=\{\varvec{u},\Theta \}\). Some calculations yield the constraints
so we replace \(f_{e_i}\) by \(u_i\) and \(f_{e_i+e_j}\) by \(\theta _{ij}/(1+\delta _{ij})\) in \(\varvec{f}\) and let \(\varvec{w}\) be the resulting vector.
We choose an positive integer \(M\ge 2\), the subspace is then defined as \(\mathbb H_{sub}^{\omega ^{[\varvec{u},\Theta ]}}= \mathrm {span}\left\langle \left\{ \mathcal {H}^{[\varvec{u}, \Theta ]}_{\alpha }(\varvec{\xi })\right\} _{|\alpha |\le M}\right\rangle \), which is an admissible subspace. The projection operator is chosen as the orthogonal projection, and the quasi-orthogonal property, i.e. \((\mathcal {H}^{[\varvec{u}, \Theta ]}_{\alpha },\mathcal {H}^{[\varvec{u}, \Theta ]}_{\beta })_{\omega ^{[\varvec{u},\Theta ]}} =\mathrm {Const}_{\alpha }\prod _{d=1}^D\delta _{\alpha _d,\beta _d}\), indicates \(\varvec{\mathrm {P}}_b=\varvec{\mathrm {P}}_p=\varvec{\mathrm {T}}\). As for HME, the projection strategy vanishes.
With these inputs, the moment system can be derived as follows. Since
the matrix \(\varvec{\mathrm {D}}=(d_{ij})\) satisfies, for \(1\le i\le j\le D\),
and all entries, not defined above, are zeros. It is easy to observe that \(\varvec{\mathrm {D}}\) is a low-triangular matrix and the diagonal entries are all non-zero, hence \(\varvec{\mathrm {D}}\) is invertible.
The property of generalized Hermite polynomials give
which indicates the form of the matrix \(\varvec{\mathrm {M}}_d\). Since the projection \(\mathcal {P}\) is an orthogonal projection and \(p_d(\varvec{v})\) is a linear polynomial, Theorem 1 indicates the system
is globally hyperbolic.
Particularly, the moment system with \(M=2,D=3\) is the 10 moment system with Gaussian closure [15].
5.3 G13 Moment System with Hyperbolic Regularization
Among all of Grad’s moment systems, the G13 moment system drew most attention of researchers. However, the system suffers a serious problem with its hyperbolicity. In Ref. [6], it is reported that the hyperbolicity of it cannot be ensured even around the Maxwellian. Recently, in Ref. [3], the authors proposed a hyperbolic regularization for it. Now we put it in the framework in detail to help readers to understand the framework. Here we need to point out that this subsection is similar as Section 4.1.1 in Ref. [3] since the procedure of the derivative of the moment system is same.
The kinetic equation and the weight function are the same as those of HME with \(D=3\), and the only difference is the projection. Since in Sect. 5.1 the moment system with infinite equations has been derived, based on the idea in Sect. 4.3.2, we just need to give the projection. The symbols \(\varvec{w}\), \(\varvec{\mathrm {D}}\) and \(\varvec{\mathrm {M}}_d\) have the same definition as that in Sect. 5.1.
For the 13 moment system, only \(\rho , u_i, p_{ij},q_i\), \(i,j=1,\ldots ,3\) are taken into account, hence the subspace is \(\mathbb H^{\omega ^{[\varvec{u},\theta ]}}_{sub}= \mathrm {span}\left\langle \omega ^{[\varvec{u},\theta ]} \left\{ 1,\xi _i,\xi _i\xi _j,|\varvec{\xi }|^2\xi _i\right\} \right\rangle \). We choose the basis of \(\mathbb H^{\omega ^{[\varvec{u},\theta ]}}_{sub}\) as \(\left\{ \mathcal {H}^{[\varvec{u}, \theta ]}_{\alpha }\right\} _{|\alpha |\le 2} \bigcup \left\{ \sum _{d=1}^D\mathcal {H}^{[\varvec{u}, \theta ]}_{e_i+2e_d}, i=1,\ldots ,3\right\} \), then the matrix \(\varvec{\mathrm {P}}_b=(p_{b,ij})_{13\times \infty }\) is
where \(\mathcal {N}(\alpha )\) is the same as in the definition for HME, and all entries, not defined above, are zero.
The orthogonal projection is used for the 13 moment system, so some calculations based on (2.3) give the matrix \(\varvec{\mathrm {P}}_p=(p_{p,ij})_{13\times \infty }\) as
and all entries, not defined above, are zero again. Easy to check, we have \(\varvec{\mathrm {P}}_p\varvec{w}=\varvec{w}_{13}\), where \(\varvec{w}_{13}=(\rho ,u_1,u_2,u_3,\theta /2,f_{e_1+e_2},f_{e_1+e_3},f_{2e_2},f_{e_2+e_3},f_{2e_3}, q_1/5,q_2/5,q_3/5)^T\). Remark 2 indicates that \(\varvec{w}\) is replaced by \(\varvec{\mathrm {P}}_b\varvec{\mathrm {P}}_p\varvec{w}=\varvec{\mathrm {P}}_b\varvec{w}_{13}\), which yields
First, the ansatz is
with \(f_{e_i}=0, i=1,2,3\) and \(\sum _{i=1}^3f_{2e_i}=0\). Let
Then the time and space derivative can be calculated directly as
Projecting \(\dfrac{\partial {\mathcal {P}f}}{\partial {s}}\) into the subspace \(\mathbb H^{\omega ^{[\varvec{u},\theta ]}}_{sub}\) is in fact discarding all the underlined terms and revising the double underlined terms as
Till now, we have calculated \(\mathcal {P}\dfrac{\partial {\mathcal {P}f}}{\partial {s}}=\left\langle \varvec{\mathrm {P}}_b\varvec{\mathcal {H}}^{[u,\theta ]},\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {s}}\right\rangle _{13}\). For the convection term, Grad directly multiplied \(\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}}\) by velocity \(x_k\) while in our framework we multiplied \(\mathcal {P}\dfrac{\partial {\mathcal {P}f}}{\partial {x_d}}\) by velocity \(x_k\). Direct calculations give the expression of \((\xi _k-u_k)\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}}\) and \((\xi _k-u_k)\mathcal {P}\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}}\) as
where h.o.t. denotes by the terms with \(\mathcal {H}^{[\varvec{u}, \theta ]}_{\alpha }(\varvec{\xi })\), \(|\alpha |>3\), and C1 and C2 correspond to \((\xi _k-u_k)\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}}\) and \((\xi _k-u_k)\mathcal {P}\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}}\), respectively. These calculations give \((\xi _k-u_i)\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}} = \left\langle (\xi _k-u_k)\varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x_k}}\right\rangle _{\infty } =\left\langle \varvec{\mathcal {H}}^{[u,\theta ]}, (\varvec{\mathrm {M}}_k-u_k\varvec{{I}})\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x_k}}\right\rangle _{\infty }\) and \((\xi _k-u_i)\mathcal {P}\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}} = \left\langle (\xi _k-u_k)\varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x_k}}\right\rangle _{\infty } =\left\langle \varvec{\mathcal {H}}^{[u,\theta ]}, (\varvec{\mathrm {M}}_k-u_k\varvec{{I}})\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x_k}}\right\rangle _{\infty }\). Projecting \((\xi _k-u_k)\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}}\) and \((\xi _k-u_k)\mathcal {P}\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}}\) into the subspace \(\mathbb H^{\omega ^{[\varvec{u},\theta ]}}_{sub}\) is in fact discarding h.o.t. terms and revising the double underlined terms as
and revising the underlined terms as
Till now, we finish the convection term and obtain \(\mathcal {P}(\xi _k-u_i)\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}}\) \(=\) \( \left\langle \varvec{\mathrm {P}}_b\varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {P}}_p(\varvec{\mathrm {M}}_k-u_k\varvec{{I}})\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x_k}}\right\rangle _{13}\) and \(\mathcal {P}(\xi _k-u_i)\mathcal {P}\dfrac{\partial {\mathcal {P}f}}{\partial {x_k}} = \left\langle \varvec{\mathrm {P}}_b\varvec{\mathcal {H}}^{[u,\theta ]}, \varvec{\mathrm {P}}_p(\varvec{\mathrm {M}}_k-u_k\varvec{{I}})\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\dfrac{\partial {\varvec{\mathrm {P}}_p\varvec{w}}}{\partial {x_k}}\right\rangle _{13}\).
Then matching the coefficients of \(\varvec{\mathrm {P}}_b\mathcal {H}^{[\varvec{u}, \theta ]}\), we obtain the well-known Grad’s 13 moment system (G13) and hyperbolic regularized 13 moment system (HR13):
where \(\dfrac{\,\mathrm {d}{\cdot }}{\,\mathrm {d}{t}}=\dfrac{\partial {\cdot }}{\partial {t}}+\sum _{k=1}^3u_k\dfrac{\partial {\cdot }}{\partial {x_k}}\) is the material derivative, and in the governing equation of \(\sigma _{ij}\), the trace-free tensor symbol is used, which is defined as for a tensor \(t_{ij}\), \(t_{\langle ij\rangle }=\frac{1}{2}(t_{ij}+t_{ji})-\sum _{k=1}^3\frac{1}{3}t_{kk}\).
The upper systems can be easily written in the form as
and HR13 is exactly the regularized 13 moment system in Ref. [3] and is globally hyperbolic.
5.4 Maximum Entropy Closure
Levermore investigated the maximum entropy principle and provided a moment closure hierarchy for the Boltzmann equation in Ref. [14]. The resulting moment system possesses an entropy and global hyperbolicity, while it is known for the lack of a simple analytical expression. Nevertheless, we try to put the moment system in our framework. For convenience, only the case \(D=1\) is studied, but there is no essential difficulty to extend this to multi-dimensional cases.
For an even and positive integer M, Levermore’s linear subspace \(\mathbb {M}\) is defined by \(\mathbb {M}=\mathrm {span}\left\langle 1,\xi ,\ldots ,\xi ^M\right\rangle \). Based on the maximum entropy principle, the distribution function is assumed to have the following form
where \(\varvec{g}\in \mathbb {R}^{M+1}\) is a vector of some macroscopic parameters and \(\varvec{\psi }=(1,\xi ,\ldots ,\xi ^M)^T\). Choose the weight functions as \(\omega ^{[\varvec{g}]}=\mathcal {M}(\varvec{g})\), then using the Schmidt orthogonalization, we can obtain an orthogonal basis \(\phi _i\) of \(\mathbb H^{\omega ^{[\varvec{g}]}}\) satisfying \(\phi _i/\omega ^{[\varvec{g}]}\) is a monic polynomial with degree i, i.e. there exist constants \(c_{m,i}(\varvec{g}), i=0,\ldots ,m-1\) such that
If we let \(c_{i,i}=1\) and \(c_{i,j}=0, j>i\), \(i,j=1,\ldots ,M+1\), then \(\varvec{\varphi } = \omega ^{[\varvec{g}]}\varvec{\mathrm {C}}\varvec{\psi }\), where \(\varvec{\varphi }=(\phi _0,\ldots ,\phi _M)^T\) and \(\varvec{\mathrm {C}} = (c_{i-1,j-1})_{M+1\times M+1}\). Since \(\varvec{\mathrm {C}}\) is a lower triangular matrix and its diagonal entries are all zero, \(\varvec{\mathrm {C}}\) is invertible.
Set the subspace as \(\mathbb H_{sub}^{\omega ^{[\varvec{g}]}}= \{\omega ^{[\varvec{g}]}h|h\in \mathbb {M}\}\) and \(\phi _i, i=0,\ldots ,M\), as the basis. Furthermore, an orthogonal projection is used, thus \(\varvec{\mathrm {P}}_p=\varvec{\mathrm {P}}_b=\varvec{\mathrm {T}}\). Since Levermore assumed the distribution function had the form \(\mathcal {M}(\varvec{g})\), we have \(\mathcal {P}f=\mathcal {M}(\varvec{g})\). So the constraints are
and \(\varvec{w}\) is set to \(\varvec{w}(g_0,\ldots ,g_M,f_{M+1},\ldots )^T\). We write \(\varvec{w}_{M+1}=\varvec{\mathrm {P}}_p\varvec{w}=\varvec{g}\).
Now we begin to derive the moment system. The time and space derivative turns out to be
where \(\tilde{\varvec{\mathrm {D}}}=\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T=\varvec{\mathrm {P}}_b^T\varvec{\mathrm {C}}^{-T}\).
Since \(\phi _i/\omega ^{[\varvec{g}]}\) is an orthogonal polynomial, there exist three-term recurrence relations, i.e. there exist \(r_{i,j}(\varvec{g}), j=i-1,i,i+1\) such that
Denote \(\varvec{\mathrm {M}}^T=(m_{ij})\) by \(m_{i+1,j+1}=r_{i,j},j=i-1,i,i+1, i=0,1,\ldots \) and \(m_{i+1,j+1}=0, j\ne i-1,i,i+1, i=0,1,\ldots \), then
is Levermore’s moment system. Since \(\varvec{\mathrm {P}}_p\varvec{\mathrm {M}}\tilde{\varvec{\mathrm {D}}} = \varvec{\mathrm {P}}_p\varvec{\mathrm {M}}\varvec{\mathrm {P}}_b^T\varvec{\mathrm {C}}^{-T} = \varvec{\mathrm {P}}_p\varvec{\mathrm {M}}\varvec{\mathrm {P}}_b^T\varvec{\mathrm {P}}_p\varvec{\mathrm {P}}_b^T\varvec{\mathrm {C}}^{-T}\), the moment system
derived by our framework, is also Levermore’s moment system.
5.5 Quadrature-Based Moment Equations
Different from HME, a new globally hyperbolic regularization for Grad’s moment system was proposed by Koellermeier et al. in [11, 12], recently. The underlying idea of their quadrature-based moment equations (QBME) is the substitution of the projection method from analytical integration to quadrature formulas. With the help of a new framework in Ref. [12], it was shown that the emerging system of equations is in fact hyperbolic and the eigenvalues also correspond to the Hermite roots. Now we would like to give a concise deduction of the one-dimensional quadrature-based moment equations in terms of the proposed framework of this paper.
For QBME, the 1D Boltzmann equation is considered and the kinetic equation reads
where \(f=f(t,x,v)\). The weight function and the orthogonal weighted polynomials are defined by
where \(\mathcal {H}_k(v)/\omega (v)\) is the classical Hermite polynomials. The orthogonal weighted polynomials satisfy the following properties:
-
Differential relation: \(\dfrac{\,\mathrm {d}{\mathcal {H}_k(v)}}{\,\mathrm {d}{v}}=-\mathcal {H}_{k+1}(v)\);
-
Recurrence relation: \(\mathcal {H}_{k+1}(v)=v\mathcal {H}_k(v)-k\mathcal {H}_{k-1}(v)\).
For convenience, we define the matrix \(\varvec{\mathrm {D}}_v=(d_{ij})\) with \(d_{ij}=\delta _{i,j+1}\) and \(\varvec{\mathrm {M}}_v=(m_{ij})\) with \(m_{i,i+1}=i\), \(m_{i+1,i}=1\) and all others entries set to zeros. Then we have \(\dfrac{\,\mathrm {d}{\varvec{\mathcal {H}}}}{\,\mathrm {d}{s}}=-\varvec{\mathrm {D}}_v^T\varvec{\mathcal {H}}\) and \(v\varvec{\mathcal {H}}=\varvec{\mathrm {M}}_v^T\varvec{\mathcal {H}}\), where \(\varvec{\mathcal {H}}= (\mathcal {H}_0,\ldots ,\mathcal {H}_n,\ldots )^T\). Since \(\varvec{\eta }=\{u,\theta \}\), some calculations yield the constraints
We choose \(\varvec{w}\) as \((f_0, u, \theta ,f_3,\ldots ,f_k,\ldots )^T\). Choose a positive integer \(M\ge 3\), the subspace is then defined as \(\mathbb H_{sub}^{\omega } =\mathrm {span}\left\langle \left\{ \mathcal {H}_{k}\right\} _{k\le M}\right\rangle \). The projection operator is chosen as the orthogonal projection, i.e. \(\varvec{\mathrm {P}}_b=\varvec{\mathrm {P}}_p=\varvec{\mathrm {T}}\).
For the time and space derivative, we have
For the derivative term, there are two matrices in the last term of the upper equation. The internal projection strategy \(PS_1\) is
Collecting all the coefficients of \(\dfrac{\partial {\varvec{w}}}{\partial {s}}\), we obtain \(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T=(d_{ps,i,j})_{M+1,M+1}\) satisfying
It is easy to verify the invertibility of \(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\). Since \(p(v)=u+\sqrt{\theta }v\), the internal projection strategy \(PS_2\) vanishes and \(\varvec{\mathrm {M}}=u\varvec{{I}}+\sqrt{\theta }\varvec{\mathrm {M}}_v\). Since the projection \(\mathcal {P}\) is an orthogonal projection and \(p_d(\varvec{v})\) is a linear polynomial, Theorem 1 indicates the resulting system
is globally hyperbolic.
The derivation shows that even the QBME with substitution of exact integration by a suitable quadrature rule can be interpreted as a certain projection method, where the internal projection strategy \(PS_1\) is particularly important. In fact, the additional projection in \(PS_1\) reflects the additional cut-off of higher order terms that is done by quadrature-based methods automatically during the calculation, see e.g. the hyperbolicity proof in Ref. [12].
Here we point out that if the internal projection strategy \(PS_1\) is chosen as
i.e. without the additional projection in the last term, the resulting moment system is the same as the HME moment system (3.15) in Sect. 3.3.
5.6 Model Reduction with Alternative Projection Operators
Apart from the choice of the equation, the basis functions and the internal projection strategy, there is also the possibility to use different projection operators to derive existing and new moment systems.
In the framework proposed in Sect. 4 there are three projections, i.e. projection of the distribution function, the time and space derivative and the term after multiplying with velocity into the subspace \(\mathbb H_{sub}^{\omega }\). Different projections correspond to different steps during the computation, thus it can be reasonable to use different projection operators in the framework. Then the resulting moment system can be written as
where \(\varvec{\mathrm {P}}_p^{(k)}\), \(k=1,2,3\) correspond to three projections and \(\varvec{\mathrm {P}}_p\) is some projection for the right side hand, which is not concerned in this paper. In calculating \(\varvec{\mathrm {D}}_{PS_1}\) and \(\varvec{\mathrm {M}}_{d,PS_2}\), the projections \(\varvec{\mathrm {P}}_p^{(2)}\) and \(\varvec{\mathrm {P}}_p^{(3)}\) are used. The procedure of the framework requires \(\varvec{\mathrm {P}}_p^{(1)}\) to be commutative with time and space derivative, and the conditions in Theorem 1 restrict \(\varvec{\mathrm {P}}_p^{(3)}\) to an orthogonal projection. Based on this idea, it is possible to derive a different type of moment system for the same inputs of the framework except for the projection. However, we remark that for the standard projection, we have \(\mathcal {P}^2=\mathcal {P}\), but for different projections \(\mathcal {P}_1\) and \(\mathcal {P}_2\), \(\mathcal {P}_2\mathcal {P}_1\) is usually not equal to \(\mathcal {P}_2\). The viewpoint in Sect. 4.3.2 may fail to work. In the procedure of the framework, more attention should be paid on the derivation.
As an example for the derivation of an existing system, we consider the 1D QBME, described in Sect. 5.5.
If we choose \(\varvec{\mathrm {P}}_p^{(1)} = \varvec{\mathrm {T}}\), then compute the time and space derivative, we get
where \(\varvec{\mathrm {D}}^d\varvec{\mathrm {P}}_b^T\) is \(\varvec{\mathrm {D}}\varvec{\mathrm {P}}_b^T\) with \(f_k=0\) for \(k>M\), and \(\mathcal {L}\), \(\mathcal {P}\), f, \(\varvec{w}\), \(\varvec{\phi }\) and \(\varvec{\mathrm {D}}\) have the same definition as that in 5.1. We choose the second projection \(\varvec{\mathrm {P}}_p^{(2)}\) as
where \(\varvec{\mathrm {E}}_{i,j}\) is a matrix with only the i, j-entry is one and the others are all zero, and the size of it depends on the context. Choosing the third projection \(\varvec{\mathrm {P}}_p^{(3)}=\varvec{\mathrm {T}}\), the resulting moment equations
are the quadrature-based moment equations [12], and the same as those in Sect. 5.5.
From the point of view of using different projections in the framework, we can see the difference between HME and QBME for 1D, which is only the use of a different projection operator. It shows, that the methods are in fact closely related and belong to the same type of projection method. The same procedure is unfortunately not possible in the multi-dimensional case, as the basis functions do not match.
This treatment also offers some flexibility for the hyperbolicity. The eigenvalues of the coefficient matrix of the system all depend on the matrix \(\varvec{\mathrm {P}}_p^{(3)}\varvec{\mathrm {M}}_{d,PS_2}\varvec{\mathrm {P}}_b^T\), and the only constraint on the matrix \(\varvec{\mathrm {P}}_p^{(2)}\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\) is the invertibility. Hence, it is possible to derive other hyperbolic systems if wanted.
6 New Models
In the last section, several conventional hyperbolic moment systems were studied in the framework. As a powerful tool, the framework is not only able to include existing models, but is also able to derive new models. Based on the framework, we will derive some new hyperbolic moment systems in this section.
6.1 Regularization of Grad’s Ordered Moment Hierarchy
For the conventional Boltzmann equation (3.1) with a Maxwellian as the weight function, there are two possible choices of the subspace \(\mathbb H_{sub, M}^{\omega ^{[\varvec{u},\theta ]}}\), where \(\omega ^{[\varvec{u},\theta ]}\) is the same as that in HME, and M is a positive integer. One choice is
corresponding to 10, 20, 35, 56, 84, \(\ldots \) moments or moment systems G10, G20, G35, G56, G84, \(\ldots \) for \(D=3\). The moment systems in Ref. [4] and HME correspond to this choice. This set of moments is sometimes called a full moment theory, see e.g. [21], because it includes the full set of moments up to order M.
The other choice is
corresponding to \(5, 13, 26, 45, \ldots \) moments or moment systems \(G5, G13, G26, G45, \ldots \) for \(D=3\). The G13 moment system in Sect. 5.3 belongs to this class. The second set of moments can be seen as a hierarchy of moment sets that is a kind of ordered moment system, because higher members of the hierarchy always include fluxes of the lower members, see again [21] where this notation is used first. Note that members of the ordered moment hierarchy also have a rotationally invariant basis.
Full moment theories have been extensively studied and globally hyperbolic versions for it have also been proposed. But for Grad’s ordered moment theories, there is only very few work, e.g. [19], and globally hyperbolic regularizations are only proposed for G13. Here we give a concise derivation of the ordered moment hierarchy and propose a globally hyperbolic version. Similar as the definition of the regularized G13 moment system in Sect. 5.3, we only need to choose the projection. Hence, the symbols \(\omega ^{[\varvec{u},\theta ]}\), \(\mathcal {H}^{[u, \theta ]}\), \(\varvec{w}\), \(\varvec{\mathrm {M}}_d\) and \(\varvec{\mathrm {D}}\) have the same definitions as those in Sect. 5.1.
First, we define the moments
Let \(\{\mathcal {H}^{[\varvec{u}, \theta ]}_{\alpha }\}_{\alpha \in \mathbb {N}^D}\) be the basis of \(\mathbb H^{\omega ^{[\varvec{u},\theta ]}}\), and \(\{\mathcal {H}^{[\varvec{u}, \theta ]}_{\alpha }\}_{|\alpha |\le M-1}\bigcup \{ \sum _{d=1}^D\mathcal {H}^{[\varvec{u}, \theta ]}_{\alpha +2e_d}\}_{|\alpha |=M-2}\) be the basis of \(\mathbb H_{sub}^{\omega ^{[\varvec{u},\theta ]}}\). Then \(\varvec{\mathrm {P}}_b=(p_{b,i,j})\) is, for \(d=1,\cdots ,D\),
Here \(\mathcal {N}( (M-1)e_D)\) is the cardinality of \(\{\alpha \}_{|\alpha |\le M-1}\), and \(\mathcal {N}(\alpha +2e_1)\) is the consecutive number of \(\sum _{d=1}^D\mathcal {H}^{[u, \theta ]}_{\alpha +2e_d}\) in the basis of \(\mathbb H_{sub}^{\omega ^{[\varvec{u},\theta ]}}\). The orthogonal projection is used, thus \(\varvec{\mathrm {P}}_p\) can be calculated based on (2.3) as
where \(\alpha !\) stands for \(\prod _{d=1}^D\alpha _d!\). Easy to check, we have \(\varvec{\mathrm {P}}_p\varvec{w}=\varvec{w}_N\), where N is the dimension of \(\mathbb H_{sub}^{\omega ^{[\varvec{u},\theta ]}}\), and \(\varvec{w}_N\) is
Then
is Grad’s ordered moment system of order M and
is the regularized version thereof. Theorem 1 indicates that the moment system is globally hyperbolic.
As stated in Remark 2, the matrixes \(\varvec{\mathrm {D}}\) and \(\varvec{\mathrm {M}}_d\) and the vector \(\varvec{S}\) in the upper equation is defined as \(\varvec{\mathrm {D}}=\varvec{\mathrm {D}}(\varvec{\mathrm {P}}_b\varvec{\mathrm {P}}_p\varvec{w})\), \(\varvec{\mathrm {M}}=\varvec{\mathrm {M}}(\varvec{\mathrm {P}}_b\varvec{\mathrm {P}}_p\varvec{w})\), \(\varvec{S}=\varvec{S}(\varvec{\mathrm {P}}_b\varvec{\mathrm {P}}_p\varvec{w})\), respectively.
Particularly, if \(D=3\) and \(M=2\), the moment system reduces to the classical Euler equations, and if \(D=3\) and \(M=3\), the moment system is that in Sect. 5.3.
6.2 Quadrature-Based Moment Equations for Multi-Dimensional Case
QBME have been extended to the multi-dimensional case in Ref. [13], based on the quadrature-based idea. However, the tensor product approach for the quadrature points causes that the resulting system in Ref. [13] is not rotationally invariant. Note that it is impossible to achieve the rotational invariance in that framework as there is no corresponding rotational invariant Gaussian quadrature rule in multiple dimensions.
In this subsection, we extend QBME to the multi-dimensional case based on the framework in Sect. 4 to obtain a hierarchy of globally hyperbolic and rotationally invariant moment systems.
For the D-dimensional Boltzmann equation, the kinetic equation is
where \(f=f(t,\varvec{x},\varvec{v})\). The weight function and the orthogonal weighted polynomials are defined by
and satisfy the following properties:
-
Differential relation: \(\dfrac{\,\mathrm {d}{\mathcal {H}_\alpha (\varvec{v})}}{\,\mathrm {d}{v_d}}=-\mathcal {H}_{\alpha +e_d}(\varvec{v})\), \(d=1,\ldots ,D\),
-
Recurrence relation: \(\mathcal {H}_{\alpha +e_d}(\varvec{v})=v_d\mathcal {H}_{\alpha }-\alpha _d\mathcal {H}_{\alpha -e_d}(\varvec{v})\), \(d=1,\ldots ,D\).
Similar as in Sect. 5.5, we define \(\varvec{\mathrm {D}}_{v,d}\) such that \(\dfrac{\,\mathrm {d}{\varvec{\mathcal {H}}}}{\,\mathrm {d}{v_d}}=-\varvec{\mathrm {D}}_{v,d}^T\varvec{\mathcal {H}}\) and \(\varvec{\mathrm {M}}_{v,d}\) such that \(v_d\varvec{\mathcal {H}}=\varvec{\mathrm {M}}_{v,d}^T\varvec{\mathcal {H}}\), \(d=1,\ldots ,D\), where \(\varvec{\mathcal {H}}=(\mathcal {H}_{\alpha })\) is a vector of elements sorted by ascending order of \(\alpha \). We set \(\varvec{\eta }=(u_1,\ldots ,u_D,\theta )\) and some calculations yield the constraints
Hence, we use \(u_i\) to replace \(f_{e_i}\) and \(\theta /2\) to replace \(f_{2e_1}\) in \(\varvec{f}\), and name the resulting vector \(\varvec{w}\), where \(\varvec{f}=(f_{\alpha })\) is a vector of elements sorted by ascending order of \(\alpha \). We choose a positive integer \(M\ge 3\), and the subspace is then defined as \(\mathbb H^{\omega }_{sub}=\mathrm {span}\left\langle \left\{ \mathcal {H}_{\alpha } \right\} _{|\alpha |\le M}\right\rangle \). Note that this yields a rotationally invariant basis, in contrast to the approach of the existing multi-dimensional QBME method.
The projection operator is chosen as the orthogonal projection, i.e. \(\varvec{\mathrm {P}}_b=\varvec{\mathrm {P}}_p=\varvec{\mathrm {T}}\).
For the time and space derivative, we have, for \(s=t,x_d\), \(d=1,\ldots ,D\),
Similar as for the 1D case, the internal projection strategy \(PS_1\) is
Collecting all the coefficients of \(\dfrac{\partial {\varvec{w}}}{\partial {s}}\), we obtain \(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T=(d_{ps,i,j})_{N\times N}\), \(N=\mathcal {N}(Me_D)\), satisfying
where all entries not defined above are zero. Based on the analysis in Sects. 5.1 and 5.5, it is easy to verify that \(\varvec{\mathrm {P}}_p\varvec{\mathrm {D}}_{PS_1}\varvec{\mathrm {P}}_b^T\) is invertible.
Since \(p_d(\varvec{v})=u_d+\sqrt{\theta }v_d\), the internal projection strategy \(PS_2\) vanishes and \(\varvec{\mathrm {M}}_d=u_d\varvec{{I}}+\sqrt{\theta }\varvec{\mathrm {M}}_{v,d}\). Since the projection \(\mathcal {P}\) is an orthogonal projection and \(p_d(\varvec{v})\) is a linear polynomial, Theorem 1 indicates the resulting system
is globally hyperbolic and a rotationally invariant, multi-dimensional extension of QBME.
We emphasize that this extension is only possible with the help of the operator projection approach. In multiple dimensions, there is no Gaussian quadrature rule that could result in a rotationally invariant moment system. However, the use of the projection operator \(\varvec{\mathrm {P}}_b=\varvec{\mathrm {P}}_p=\varvec{\mathrm {T}}\) mimics the effect of a Gaussian quadrature rule, as it essentially cuts off the highest order term during every different step of the derivation. We can therefore say that the derivation of the new system follows the quadrature-based technique but uses an operator projection to achieve the rotational invariance.
7 Conclusion
For first-order convection equations, hyperbolicity is necessary for the existence of a solution. Historically, the lack of global hyperbolicity has been a critical defect of Grad’s moment method, and largely limited the development of moment methods. In this paper, we investigate Grad’s moment system and its globally hyperbolic regularized version for the 1D Boltzmann equation, then point out that the most essential point of the regularization is to treat the time derivative and the space derivative in the same manner.
Based on this observation, a general framework for the construction of hyperbolic moment systems from kinetic equations using the operator projection method is proposed. This framework is so concise and clear that it can be treated as an algorithm, and once the four inputs, i.e. the kinetic equation, the weight function, the projection operator and the internal projection strategy, are given, the moment system can be derived with some routine calculations. Among the four inputs, the weight function is the most essential one, because it determines the approximation space. The projection operator determines the type of the moment system. In this framework, it is possible to contain some information of the problems to be solved in the moment system by the choice of an appropriate weight function, and it is also possible to derive moment systems without the projection first and then to perform the projection at last, which helps to understand the difference of moment systems with the same weight function (such as G20 and G13) or even the same basis (such as 1D HME and QBME).
Different existing hyperbolic models, such as hyperbolic regularizations of Grad’s moment method for 1D (Sect. 3.3) and nD (Sect. 5.1), anisotropic hyperbolic moment equations (Sect. 5.2), the hyperbolic version of the G13 moment system (Sect. 5.3), Levermore’s maximum entropy principle (Sect. 5.4) and quadrature-based moment equations (QBME) (Sect. 5.5), are included in the framework. Actually, some other models, such as the \(P_N\) and \(M_N\) model in radiative transfer are also included in this framework. Furthermore, based on the framework, we propose a hyperbolic regularization of the ordered moment hierarchy (such as 13, 26, 45 moment systems), and extend QBME to the multi-dimensional case with the resulting moment system being rotational invariant.
The aforementioned examples and applications thus show the benefit of the new operator projection approach and open many new possibilities for research on moment methods.
Notes
See discussion on the admissible subspace for any moment method in Ref. [14].
\(\varvec{\eta }_1\) can be treated as a set, but uniqueness demands that every element of \(\varvec{\eta }_1\) cannot be expressed by the others. For example, \(\{\rho , \theta ,p\}\) is not allowed because \(p=\rho \theta \), while \(\{\rho ,u,\theta \}\) is allowed.
References
Cai, Z., Fan, Y., Li, R.: Globally hyperbolic regularization of Grad’s moment system in one dimensional space. Commun. Math. Sci. 11(2), 547–571 (2013)
Cai, Z., Fan, Y., Li, R.: Globally hyperbolic regularization of Grad’s moment system. Commun. Pure Appl. Math. 67(3), 464–518 (2014)
Cai, Z., Fan, Y., Li, R.: A framework on moment model reduction for kinetic equation. SIAM J. Appl. Math. 75(5), 2001–2023 (2015)
Cai, Z., Li, R.: Numerical regularized moment method of arbitrary order for Boltzmann-BGK equation. SIAM J. Sci. Comput. 32(5), 2875–2907 (2010)
Cai, Z., Li, R., Wang, Y.: Numerical regularized moment method for high Mach number flow. Commun. Comput. Phys. 11(5), 1415–1438 (2012)
Cai, Z.-N., Fan, Y.-W., Li, R.: On hyperbolicity of 13-moment system. Kinet. Related Models 7(3), 415–432 (2014)
Fan, Y.-W., Li, R.: Globally hyperbolic moment system by generalized Hermite expansion (in Chinese). Sci. Sin. Math. 45, 1635–1676 (2015)
Grad, H.: On the kinetic theory of rarefied gases. Commun. Pure Appl. Math. 2(4), 331–407 (1949)
Gu, X.J., Emerson, D.R.: A computational strategy for the regularized 13 moment equations with enhanced wall-boundary equations. J. Comput. Phys. 255(1), 263–283 (2007)
Kauf, P., Torrilhon, M., Junk, M.: Scale-induced closure for approximations of kinetic equations. J. Stat. Phys. 141, 848–888 (2010)
Koellermeier, J.: Hyperbolic approximation of kinetic equations using quadrature-based projection methods. Master’s thesis, RWTH Aachen University (2013)
Koellermeier, J., Schaerer, R., Torrilhon, M.: A framework for hyperbolic approximation of kinetic equations using quadrature-based projection methods. Kinet. Relat. Model 7(3), 531–549 (2014)
Koellermeier, J., Torrilhon, M.: Hyperbolic moment equations using quadrature-based projection methods. In Proceedings of the 29th International Symposium on Rarefied Gas Dynamics. AIP Conf. Proc., vol. 1628, pp. 626–633 (2014)
Levermore, C.D.: Moment closure hierarchies for kinetic theories. J. Stat. Phys. 83(5–6), 1021–1065 (1996)
Levermore, C.D., Morokoff, W.J.: The gaussian moment closure for gas dynamics. SIAM J. Appl. Math. 59(1), 72–96 (1998)
McDonald, J., Torrilhon, M.: Affordable robust moment closures for CFD based on the maximum-entropy hierarchy. J. Comput. Phys. 251, 500–523 (2013)
Müller, I., Ruggeri, T.: Rational Extended Thermodynamics. Springer tracts in natural philosophy, vol. 37, 2nd edn. Springer, New York (1998)
Struchtrup, H.: Grad’s moment equations for microscale flows. In: Ketsdever, A.D. Muntz, E.P. (eds.) Rarefied Gas Dynamics: 23rd International Symposium, vol. 663, pp. 792–799. AIP (2003)
Struchtrup, H.: Macroscopic Transport Equations for Rarefied Gas Flows: Approximation Methods in Kinetic Theory. Springer, Berlin (2005)
Struchtrup, H., Torrilhon, M.: Regularization of Grad’s 13 moment equations: derivation and linear analysis. Phys. Fluids 15(9), 2668–2680 (2003)
Torrilhon, M.: Convergence study of moment approximations for boundary value problems of the Boltzmann-BGK equation. Submitted
Torrilhon, M.: Special issues on moment methods in kinetic gas theory. Continuum Mech. Thermodyn. 21(5), 341–343 (2009)
Torrilhon, M.: Hyperbolic moment equations in kinetic gas theory based on multi-variate Pearson-IV-distributions. Commun. Comput. Phys. 7(4), 639–673 (2010)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Fan, Y., Koellermeier, J., Li, J. et al. Model Reduction of Kinetic Equations by Operator Projection. J Stat Phys 162, 457–486 (2016). https://doi.org/10.1007/s10955-015-1384-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10955-015-1384-9