
Abstract
The solutions of the nonlinear time fractional parabolic problems usually undergo dramatic changes at the beginning. In order to overcome the initial singularity, the temporal discretization is done by using the Alikhanov schemes on the nonuniform meshes. And the spatial discretization is achieved by using the finite element methods. The optimal error estimates of the fully discrete schemes hold without certain time-step restrictions dependent on the spatial mesh sizes. Such unconditionally optimal convergent results are proved by taking the global behavior of the analytical solutions into account. Numerical results are presented to confirm the theoretical findings.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we consider the nonuniform Alikhanov FEMs for solving nonlinear time fractional parabolic equations (TFPEs):
where \(\Omega \subset \mathbb {\mathbb {R}}^d\), (\(d=2\) or 3) is a bounded and convex (smooth) polygon in \(\mathbb {\mathbb {R}}^2\) (or polyhedron in \(\mathbb {\mathbb {R}}^3\) ), u(x, t) is an unknown function defined in \(\Omega \times [0,T]\), and \(g(u)\in C^2(\mathbb {\mathbb {R}})\) is a nonlinear function. Here, \(\partial _t^\alpha u\) denotes the Caputo fractional derivative of order \(\alpha \), defined by
where \(\Gamma (\cdot )\) is the common Gamma function and \(w_{1-\alpha }(t)=\frac{t^{-\alpha }}{\Gamma (1-\alpha )}\). TFPEs are widely used to describe different natural phenomena involving some anomalous transport mechanism. The typical models include the time fractional Allen–Cahn equation, the time fractional fokker planck equation, the time fractional fisher equations and so on [1, 2].
In the past several decades, different numerical schemes are developed to numerically solve the TFPBs, including finite different methods [3,4,5,6,7], spectral methods [8, 9] and so on [10,11,12,13]. Since the typical solutions of TFPEs have the initial layers, the implication of the direct L1-type methods, BDF convolution quadrature methods lead some possible loss of accuracy [14]. To overcome the initial difficulties, M. Stynes et al. applied the L1-scheme on the graded meshes to solve the linear time fractional problems [15] and obtained the optimal error estimates of the fully discrete schemes. Cao et al. studied the corrected implicit-explicit schemes for the nonlinear fractional equations with nonsmooth solutions [16]. Jin et al. considered the corrected BDF convolution quadrature [17]. More about the topic, we refer readers to the recent papers [18,19,20,21,22,23,24,25,26].
In this study, we present an effective numerical scheme for solving the TFPEs. The numerical scheme is constructed as follows. The time discretization is done by using the Alikhanov scheme on the nonuniform meshes, taking global behavior of the analytical solutions into account. The spatial discretization is done by using the Galerkin FEMs. The nonlinear term is approximated by using the Newton linearized methods. Then, we obtain the unconditionally optimal error estimates of the fully discrete and linearized scheme. Such unconditional results imply that the error estimate holds without any time-step restrictions dependent on the spatial mesh sizes. We believe that this paper is the first to get the unconditional convergence results of Alikhanov formula on the general nonuniform meshes.
The key proof of the unconditional convergence results is the temporal-spatial error splitting argument, which has a successful application in analysis of numerical schemes for two- and three-dimensional PDEs of parabolic type [27,28,29,30,31]. However, the previous results are obtained by using the uniform meshes or graded meshes. The proof of the present results is much more technical due to the use of the nonuniform meshes and the non-locality of the problem. On one hand, the local truncation error is expressed in a discrete convolution form. We need to consider the effect of the errors at different time level. On the other hand, we have to estimate the boundedness of some nonlocal operator and the numerical solutions involving different time levels.
The rest of this paper is organized as follows. In Sect. 2, we propose a linearized nonuniform Alikhanov FEM for solving the problem (1.1) and present our main results. In Sect. 3, a discrete fractional Grönwall type inequality and the time-spatial splitting methods are used to obtain the error estimates. In Sect. 4, numerical tests are done to verify our theoretical findings. Finally, we give some conclusions in Sect. 5.
2 The Nonuniform Alikhanov Formula and Main Results
In this section, we present the fully discrete numerical schemes for solving problem (1.1) and the convergence results of the schemes.
Let \(\mathcal {T}_h\) be a conforming and shape regular simplicial triangulation or tetrahedra of \(\Omega \), and let \(h=\max _{K\in \mathcal {T}_h}\{\text {diam}\ K\}\) be the mesh size. Denote \(V_h\) by the finite-dimensional subspace of \(H_0^1(\Omega )\), which consists of continuous piecewise polynomials of degree r (\(r\ge 1\)) on \(\mathcal {T}_h\). Let time step \(\tau _k = t_k-t_{k-1}, t_{k-\theta }=(1-\theta )t_k+\theta t_{k-1},0=t_0<t_1<t_2<\cdots <t_N,\theta \in [0,1)\), where N is an integer. Denote the step size ratios \(\rho _k:=\tau _k/\tau _{k+1}\) and the maximum step size \(\tau :=\max _{1\le k\le N}\tau _k\). For a sequence of functions{\(\omega ^n\)}, we write
The nonuniform Alikhanov approximation to Caputo’s fractional derivative at \(t_{n-\theta }\) is defined by
where \(\Pi _{2,k}\phi \) means the quadratic interpolate at \(t_{k-1},t_{k}\) and \(t_{k+1}\), and \(\Pi _{1,k}\phi \) denoted as the linear interpolate with the nodes \(t_{k-1},t_{k}\). Omit the truncation error, the nonuniform Alikhanov formula is given by
where the discrete coefficients \(\tilde{a}_{n-k}^{(n)}\) and \(\tilde{b}_{n-k}^{(n)}\) are
and
The Newton linearized nonuniform Alikhanov Galerkin FEM is to find \(U_h^n\in V_h\) such that, for \(n=1,2,\ldots ,N\),
where \(g_1(U_h^{n-1})=\frac{\partial }{\partial u}g\big |_{u=U_h^{n-1}}\).
The typical solutions of the nonlinear time fractional problems have an initial layer, which are widely described by (see. e.g., [21])
where C is a constant.
Remark 2.1
As pointed out in [14, 15], if the initial condition \(u_0(x)\in H^{r+1}(\Omega )\cap H_0^1(\Omega )\) for each t and the nonlinear term is Lipschitz continuous, then problem (1.1) has a unique solution u such that
It implies that \(\sigma =\alpha \) in most references. For the assumption \(\sigma \in (0,\alpha )\), we refer readers to [32, 33]. Suppose that the solution is smoother, i.e., \(\sigma >\alpha \), some additional hypothesis should be added (see [15]). This is quite restrictive. Just to make the current analysis extendable, we assume that \(\sigma \in (0,1)\cup (1,2)\).
To capture the initial singularities, we have some restrictions on the temporal stepsizes, i.e., we assume that there exists a constant \(C_\gamma >0\), independent of k, and a fixed \(\gamma \ge 1\) such that
Here and below, we always assume (2.4) and (2.5) hold whenever they are refereed.
Now, we present optimal error estimates of the fully discrete schemes and leave the main proof to the next sections.
Theorem 2.1
Suppose that \(u_0\in H^{r+1}(\Omega )\bigcap H_0^1(\Omega )\) and the nonlinear time fractional problem (1.1) has a unique solution, satisfying \(u(\cdot ,t)\in H^{r+1}(\Omega )\bigcap H_0^1(\Omega )\). Then, there exist positive constants \(\tau _0\) and \(h_0\), such that when \(\tau \le \tau _0\) and \(h<h_0\), the \(r-\)degree finite element system defined in (2.3) has a unique solution \(U_h^m\), \(m=1,2,3,\ldots , N\), satisfying
where \(u^m=u(\cdot ,t_m)\) and \(C_0\) is a positive constant independent of \(\tau \) and h.
Remark 2.2
The assumption (2.5) is necessary due to the initial layer. A typical example satisfying (2.5) is the graded meshes, i.e, for a given interval \([0,T_0]\), we let
where \(N_0\) is a positive integer.
Remark 2.3
At present, there are some convergence results of the nonuniform Alikhanov time discretization for time-fractional problems. In [34], Liao et al. presented the error convolution structure and a global consistency analysis of the nonuniform Alikhanov approximation. They also obtained a sharp L2-norm error estimate for the linear reaction-subdiffusion problems. In [26], Chen and Martin showed that the scheme attains second-order convergence for the linear time-fractional diffusion problem. The analysis in [26] followed a completely different line of attack. In our manuscript, the convergence results rely heavily on the discrete Grönwall inequality in [21] and the error convolution structure in [34]. However, the emphasis is quite different from the previous investigations on linear problems. In order to get convergence results for high-dimensional nonlinear problems, the boundedness of numerical solutions in the maximum norm is usually required. For this, one may apply the inverse inequality, which may lead to certain space-time restriction condition \(\tau =\mathcal {O}(h^p)\) (p is a constant). The main contribution of the present paper is to get the optimal error estimates by removing the restrictions. We believe that this paper is the first to get the results on the Alikhanov scheme for the nonlinear problems. The results imply that the numerical solutions are bounded without placing any condition on the relative sizes of the temporal and spatial meshes. Then the error estimates hold without certain time-step restrictions dependent on the spatial mesh size.
3 Proof of the Main Results
In this section, we focus on the proof of the main results.
3.1 Preparation
Some properties of \(A_{n-k}^{(n)}\) will play an important role in the proof. They are proved in [7, 34]. Here we list them.
- A1.:
-
The discrete kernels are monotone, i.e., \(0<A_{k-1}^{(n)}\le A_{k-2}^{(n)},~~2\le k\le n\le N\).
- A2.:
-
Let \(\pi _A=\frac{11}{4}\). It holds that \(A_{n-k}^{(n)}\ge \frac{1}{\pi _A\tau _k}\int _{t_{k-1}}^{t_k}w_{1-\alpha }(t_n-s)ds,~~~1\le k\le n\le N.\)
- A3.:
-
There exists a constant \(\rho >0\) such that the step size ratio \(\rho _k\le \rho ,~~~1\le k\le N-1\).
Thanks to the properties of the coefficients, one can get the following lemmas.
Lemma 3.1
[21] Let
Then, it holds
and
Lemma 3.2
[21] For any sequence \(\{v^n\}_{n=0}^{N}\), it holds
Lemma 3.3
[21] Suppose the nonnegative sequences \(\{v^n,\xi ^n\}_{n=0}^{N}\) satisfy
Then, it holds
where \(\tau _n\) satisfies \(\max _{1\le n\le N}\tau _n\le (2\pi _A\Gamma (2-\alpha )\lambda )^{-\frac{1}{\alpha }}\), \(\lambda =\lambda _1+\lambda _2\), and \(E_\alpha (z)=\sum _{k=0}^{\infty }\frac{z^k}{\Gamma (1+k\alpha )}\) is the Mittag-Leffler function.
Lemma 3.4
[34] Suppose that \(v\in C^3((0,T])\) and there exists a constant \(C_v>0\) such that
Then, it holds that
where \(\Upsilon _1^n=\frac{1}{\Gamma (1-\alpha )}\int _{0}^{t_{n-\theta }}\frac{v'(s)}{(t-s)^\alpha }ds-(D_{\tau }^{\alpha }v(t))^{n-\theta }.\)
Lemma 3.5
([34], Lemma 3.8) Suppose that \({v\in C^2((0,T])}\) with \(\Vert v''(t)\Vert _{H^2}\le C_\nu (1+t^{\sigma -2})\), where \(\sigma \in (0,1)\cup (1,2)\). Then, it holds that
where \(\Upsilon _2^{n,\theta }=\Delta v(t_{n-\theta })-\Delta v^{n,\theta }\) for \(1\le n\le N\).
Lemma 3.6
Assume that \(\nu \in C^2((0,T])\) satisfies \(|\nu '(t)|\le C_\nu (1+t^{\sigma -1}), ~~{\sigma \in (0,1)\cup (1,2)}\) and \(g\in C^2(\mathbb {R})\) is a nonlinear function. Denote \(\nu ^n=\nu (t_n)\) and \(R_\nu ^n=g(\nu ^{n-\theta })-g(\nu ^{n-1})-g_1(\nu ^{n-1})(\nu ^{n-\theta }-\nu ^{n-1}), 1\le n\le N\), \(\theta \in [0,1)\) then
Proof
Applying Taylor expansion, it holds that, for any \(0<s<1,\)
where \(C_{g1}\) is a constant dependent on g. By using the condition of \(\nu (t)\) and fundamental inequality \((a+b)^2\le 2(a^2+b^2)\), we get
and
which further gives that
which finishes the proof. \(\square \)
Let \(R_h\) : \(H_0^1(\Omega )\rightarrow V_h\) be Ritz projection operator satisfying
By classical FEM theory [35], we can find that for any \(v\in H^s(\Omega )\cap H_0^1(\Omega )\),
To prove Theorem 2.1, we need to introduce the following time-discrete system
with initial and boundary conditions
We split the errors into two terms, i.e.,
where \(u^n~:=u(\cdot , t_n)\). Then, we will show the numerical solutions are bounded without any certain time-step restrictions dependent on the spatial mesh sizes.
3.2 Analysis of the Time-Discrete System
In this subsection, we focus on the error estimates of time discrete systems.
Considering \(t=t_{n-\theta }\) in first equation of (1.1) and \(u^{n-\theta }:=u(t_{n-\theta })\), we have
where
Subtracting (3.9) from (3.13), we have
where \(e^n:=u^n-U^n\) and
Meanwhile, it holds that
and
Then, we have, for \(n=1,2,\cdots ,N,\)
Noting that \(u^n=U^n=0\) as \(x\rightarrow \partial \Omega \), it holds that
and
Therefore,
Theorem 3.1
The semi-discrete system (3.9)–(3.11) has a unique solution \(U^m\) and there exists a positive \(\tau _1^*\) such that, when \(\tau \le \tau _1^*\),
where \(m=1,2,\ldots ,N\) and \(C_1^*,C_1^{**}\) are two positive number independent of \(\tau \) and h.
Proof
Noting that at each time level, system (3.9) is a linear elliptic equation. The existence and uniqueness of the solution \(U^n\) can be obtained obviously. Next, we prove the main results by using the mathematical induction. Firstly, we can check that the estimation holds for \(m=0\). Now, we suppose that (3.18) holds for \(0\le m\le n-1\). Then, we have, for \(m\le n-1\),
where \(\tau \le \tilde{\tau }_1=(C_{\Omega }C_1^*)^{-\frac{1}{\min \{\sigma \gamma ,2\}}}\) and here and below
Together with \(g\in C^2(\mathbb {\mathbb {R}})\), there exists a positive constant \(C_L\) independent of \(\tau \) such that
Now we start to estimate the error for \(m=n\). Taking inner with \(e^{n,\theta }\) both sides in Eq. (3.15) and using Cauchy–Schwarz inequality, we arrive
Substituting (3.20)–(3.22) into (3.16), we get
where \(C_1\) is a positive constant only depending on \(C_L,K_1,\theta \).
Substituting (3.24) into (3.23) and applying \((a+b)^2\le 2(a^2+b^2)\) with Young’s inequality, we have
where \(C_2=2\theta ^2+\frac{C_1^2}{2},C_3=2(1-\theta )^2+\frac{C_1^2}{2}\). Recall Lemma 3.2, the inequality above further implies
Applying the discrete Grönwall inequality in Lemmas 3.3–3.6, we have there exists a \(\tilde{\tau }_2 ~(0<\tilde{\tau }_2\le (2\pi _A\Gamma (2-\alpha )(C_2+C_3))^{-\frac{1}{\alpha }}\) such that
where \(C_4=4 C_\nu E_\alpha (4\max (1,\rho )\pi _A(C_2+C_3) t_n^\alpha )\) is a positive constant independent of \(n,\tau \) and h. In addition, denote \(\zeta =\min \{2,\sigma \gamma \}\), we have for \(2\le k\le n\),
Therefore,
where \(C_5=C_4 C_\gamma T^{\alpha +\sigma -\frac{\zeta }{\gamma }}\).
Similarly, multiplying by \(-\Delta e^{n,\theta }\) and \(\Delta ^2 e^{n,\theta }\) in (3.15), respectively, integrating it over \(\Omega \) and using Cauchy–Schwarz inequality and the condition of boundary value (3.11), we have, there exist two constant \(\tilde{C}_2\) and \(\tilde{C}_3\), such that
and
where we have noted (3.17).
By Lemmas 3.2 and 3.3 , there exists a positive constant \({\tilde{\tau }_3}\), when \(\tau \le {\tilde{\tau }_3}\), such that
and there exists a positive constant \({\tilde{\tau }_4}\), when \(\tau \le {\tilde{\tau }_4}\), such that
where the constant \(\lambda \) is independent of \(\tau \) and h.
Together with Lemmas 3.2–3.4, we obtain
Now, by (3.27), (3.30) and (3.31), we get, when \(\tau \le {\tilde{\tau }_5}=\min \{{\tilde{\tau }_1,\tilde{\tau }_2,\tilde{\tau }_3,\tilde{\tau }_4}\}\),
which further implies that
when \(\tau \le {\tilde{\tau }}_6= C_c^{-\frac{1}{\min \{\sigma \gamma ,2\}}}\). Taking \(\tau _1^*=\min \{{\tilde{\tau }_1,\tilde{\tau }_2,\tilde{\tau }_3,\tilde{\tau }_4,\tilde{\tau }_5,\tilde{\tau }_6}\}\), we conclude that the result (3.18) holds for \(m=n\).
Using the definition of \((D_{\tau }^{\alpha }v)^{n-\theta }\), we arrive that
where \(A_0^{(n)}\le \tilde{a}_{0}^{(n)}+\rho _{n-1}\tilde{b}_{1}^{(n)}\le \frac{24}{11\tau _n}\int _{t_{n-1}}^{t_n} w_{1-\alpha }(t_n-s)ds\) is used under the condition A3 and the proof can be found in Theorem 2.2 of reference [34].
Therefore
the mathematical induction is closed, which completes the proof. \(\square \)
3.3 Analysis of Spatial-Discrete System
In this subsection, we aim to get the boundedness of the numerical solutions. Firstly, by Theorem 3.1 and \(\Vert R_h \upsilon \Vert _{L^\infty }\le C_{\Omega }\Vert \upsilon \Vert _{H^2}\) for any \(\upsilon \in H^2(\Omega )\), we can obtain \(\Vert R_h U^n\Vert _{L^{\infty }}\) is bounded. Therefore, we define
The weak form of Eq. (3.9) can be written as
where \(n=1,2,\ldots ,N\).
Let
Subtracting (2.3) from (3.33) and using (3.7), we have
where
Theorem 3.2
Let \(U^m\) and \(U_h^m\) be the solutions of (3.33) and (2.3), respectively. Then, for \(m=1,2,3,\ldots , N\), there exists \(\tau _2^*>0\), \(h_1^*>0\) such that, when \(\tau \le \tau _2^*\), \(h\le h_1^*\),
Proof
As the fact that the coefficient matrix of the resulting equation is diagonally dominant when taking sufficiently small \(\tau \), the solution of the Eq. (3.33) exists and is unique. Next, we still prove (3.36) by mathematic induction. Since \(U_h^0=R_h u_0\), we have (3.36) holds for \(m=0\).
Now, suppose that (3.36) holds for \(m=1,\cdots ,n-1\). We will show the result holds for \(m=n\). By the assumption and (3.32), we have
for \(d=2,3\) and \(h\le h_1=C_{\Omega }^{-\frac{6}{11-3d}}.\)
With the similar approach of processing \(r^n\), we can obtain that
Considering the boundedness of \(\Vert U^n\Vert _{H^2}, \Vert U_h^{n-1}\Vert _{L^{\infty }}\) and \(g\in C^2(\mathbb {R})\), we can see that, there exists a positive constant \(C_g\) dependent on \(C_1^*, K_2, C_{\Omega }\) such that
which further implies that
Here \(C_K\) is a positive constant independent of n but dependent on \(K_1, C_g, C_{\Omega }\). Taking \(v=\vartheta _h^{n,\theta }\) in Eq. (3.34), we obtain
Notice that \(\Vert \nabla \vartheta _h^{n,\theta }\Vert ^2_{L^2}\ge 0\) , we have
Substituting (3.42) into (3.43) and using Lemma 3.2, the above inequality further gives that
where \(C_{10}=2C_g(K_1+1)+\frac{C_g\theta }{2}, C_{11}=C_g(K_1+1)(1-\theta )+\frac{C_g(2-\theta )}{2}\).
Applying the inequality (3.19), Lemma 3.3 and \(U_h^0=R_h u^0\), we arrive
where \(h\le h_2=[4E_{\alpha }(4\max (1,\rho )\pi _A{(C_{10}+C_{11})}t_n^\alpha )(\pi _A\Gamma (2-\alpha )T^\alpha (C_k+C_\Omega C_1^{**}))]^{-\frac{1}{6}}\).
Furthermore,
Then, (3.36) and (3.37) hold for \(m=n\). The mathematical induction is done and the proof is completed. \(\square \)
3.4 Optimal Error Estimates
In Sect. 3.3, the boundedness of \(\Vert U_h^n\Vert _{L^\infty }\) is obtained without certain time-step restrictions dependent on the spatial mesh sizes. Thanks to the results, we are ready to get the unconditionally optimal error estimates.
The weak form of Eq. (3.13) satisfies
Denote
Subtracting (3.44) from (2.3) gives
where
and
By (3.37),
where \(C_{12}\) is a constant dependent on u and g.
Substituting \(v=\eta _h^{n,\theta }\) into (3.46) and using Cauchy–Schwarz inequality, we derive
Together with the regularity of exact solution u, we get
By Lemmas 3.3, 3.4 and 3.6, there exists a positive constant \(\tau _3^*\), when \(\tau \le \tau _3^*\), it holds
where \(C_{13}=4E_\alpha (6\max (1,\rho )\pi _AC_{12}t_n^\alpha )(C_{12}C_\Omega +C_p)\).
With (3.8), the above inequality further implies that
for \(1\le n\le N\). Therefore, (2.6) holds when \(\tau \le \tau _0 = \min \{\tau _1^*,\tau _2^*,\tau _3^*\},h \le h_0 = h_1^*\) and \(C_0\ge C_\Omega C + C_{13}\). This completes the proof of the Theorem 2.1.
4 Numerical Experiments
In this section, we present several numerical examples to confirm the theoretical results. In the numerical experiments, the interval [0,T] is divided into two parts \([0,T_0]\cup [T_0,T]\), where \(T_0:=2^{-\gamma }\). In the interval \([0,T_0]\), we let \(t_n=(n/N_0)^\gamma T_0\) for \(0\le n\le N_0\), where \(N_0:=\lceil \frac{\gamma N}{2^\gamma -1+\gamma }\rceil \). The smoothly graded meshes are applied in the first part \([0,T_0]\) and a uniform is used in the interval \([T_0,T]\).
Example 1
Consider the two-dimensional time-fractional Fisher’s equation, which are widely used in heat and mass transfer, ecology and physiology [2].
where \(\Omega =[0,1]^2\). The initial condition and the source term g are chosen correspondingly to the exact solution

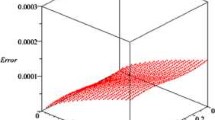
2D problem: \(L^2\)-errors of linear element approximations with fixed \(\tau \) by changing spatial mesh sizes

2D problem: \(L^2\)-errors of quadratic element approximations with fixed \(\tau \) by changing spatial mesh sizes

3D problem: \(L^2\)-errors of quadratic element approximations with fixed \(\tau \) by changing spatial mesh sizes (\(\alpha =0.6\))
To verify the numerical errors and convergence orders in temporal and spatial direction, the \(L^2\)-norm of the error is computed with \(\sigma =\alpha \) and \(\sigma \gamma =2\) for different \(\alpha \) and \(N=\lceil M^{(r+1)/2}\rceil \) with \(M=10,20,40,80\). Here, M means uniform triangular partition with \(M+1\) nodes in each direction. That is to say, we choose \(M=N\) with linear finite element methods (L-FEMs) and \(N=\lceil M^{3/2}\rceil \) for Q-FEMs, respectively. The numerical errors are shown in Tables 1, 2 and 3, respectively. It can be clearly seen that all convergence results agree with theoretical findings.
At the same time, the unconditional convergence can be confirmed by taking \(\tau =1/5,1/10,1/20,1/40\) with L-FEMs and Q-FEMs. We plot the numerical results in Figs. 1 and 2, respectively. We can see that the errors tend to be a constant. The numerical results indicate that the error estimates hold without certain time-step restrictions dependent on the spatial mesh sizes.
Example 2
Consider the three-dimensional time fractional Allen–Cahn equation,
where \(\Omega = [0,1]^3\), g is chosen correspondingly to the exact solution
We solve problem (4.2) by using L-FEMs with \(M=N\). The numerical results and the convergence orders are given in Table 4. Figure 3 illustrates that the errors tend to a constant, which implies that the conditional time steps are not needed.
5 Conclusions
In this paper, a linearized nonuniform Alkihanov FEM is proposed to solve TFPE effectively. Optimal error estimates of the fully discrete scheme are obtained. Such convergence results hold without certain time-step restrictions dependent on the spatial mesh sizes.
References
Bouchaud, J.P., Georges, A.: Anomalous diffusion in disordered media: statistical mechanisms, models and physical applications. Phys. Rep. 195(4–5), 127–293 (1990)
Alquran, M., Khaled, K.A., Sardar, T., Chattopadhyay, J.: Revisited Fishers equation in a new outlook: a fractional derivative approach. Phys. A. 438, 81–93 (2015)
Vabishchevich, P.N., Samarskij, A.A., Matus, P.P.: Second-order accurate finite-difference schemes on nonuniform grids. Comput. Math. Math. Phys. 38(3), 413–424 (1998)
Alikhanov, A.A.: A new difference scheme for the time fractional diffusion equation. J. Comput. Phys. 280, 424–438 (2015)
Sun, Z.Z., Wu, X.: A fully discrete difference scheme for a diffusion-wave system. Appl. Numer. Math. 56(2), 193–209 (2006)
Li, D., Sun, W., Wu, C.: A novel numerical approach to time-fractional parabolic equations with nonsmooth solutions. Numer. Math. Theor. Methods Appl. (2021). https://doi.org/10.4208/nmtma.OA-2020-0129
Liao, H., Li, D., Zhang, J.: Sharp error estimate of the nonuniform L1 formula for linear reaction–subdiffusion equations. SIAM J. Numer. Anal. 56, 1112–1133 (2018)
Tang, T., Yuan, H., Zhou, T.: Hermite spectral collocation methods for fractional PDEs in unbounded domains. Commun. Comput. Phys. 24(4), 1143–1168 (2018)
Zayernouri, M., Karniadakis, G.E.: Fractional spectral collocation method. SIAM J. Sci. Comput. 36(1), A40–A62 (2014)
Gunarathna, W.A., Nasir, H.M., Daundasekera, W.B.: An explicit form for higher order approximations of fractional derivatives. Appl. Numer. Math. 143, 51–60 (2019)
Cuesta, E., Lubich, C., Palencia, C.: Convolution quadrature time discretization of fractional diffusion-wave equations. Math. Comput. 75(254), 673–696 (2006)
McLean, W., Mustapha, K.: A second-order accurate numerical method for a fractional wave equation. Numer. Math. 105, 481–510 (2007)
Li, D., Liao, H., Wang, J., Sun, W., Zhang, J.: Analysis of L1-Galerkin FEMs for time-fractional nonlinear parabolic problems. Commun. Comput. Phys. 24(1), 86–103 (2018)
Jin, B., Li, B., Zhou, Z.: Numerical analysis of nonlinear subdiffusion equations. SIAM J. Numer. Anal. 56, 1–23 (2018)
Stynes, M., O’Riordan, E., Gracia, J.L.: Error analysis of a finite difference method on graded meshes for a time-fractional diffusion equation. SIAM J. Numer. Anal. 55, 1057–1079 (2017)
Cao, W., Zeng, F., Zhang, Z., Karniadakis, G.E.: Implicit-explicit difference schemes for nonlinear fractional differential equations with nonsmooth solutions. SIAM J. Sci. Comput. 38, A3070–A3093 (2016)
Jin, B., Li, B., Zhou, Z.: Correction of high-order BDF convolution quadrature for fractional evolution equations. SIAM. J. Sci. Comput. 39, A3129–A3152 (2017)
Meng, X., Stynes, M.: Convergence analysis of the Adini element on a Shishkin mesh for a singularly perturbed fourth-order problem in two dimensions. Adv. Comput. Math. 45(2), 1105–1128 (2019)
Gao, G.H., Sun, Z.Z., Zhang, H.W.: A new fractional numerical differentiation formula to approximate the Caputo fractional derivative and its applications. J. Comput. Phys. 259, 33–50 (2014)
Liu, Y., Zhang, M., Li, H., Li, J.: High-order local discontinuous Galerkin method combined with WSGD-approximation for a fractional subdiffusion equation. Comput. Math. Appl. 73(6), 1298–1314 (2017)
Liao, H., Mclean, W., Zhang, J.: A discrete Grönwall inequality with application to numerical schemes for subdiffusion problems. SIAM J. Numer. Anal. 57(1), 218–237 (2019)
Liao, H., Yan, Y., Zhang, J.: Unconditional convergence of a fast two-level linearized algorithm for semilinear subdiffusion equations. J. Sci. Comput. 80, 1–25 (2019)
Kopteva, N.: Error analysis of the L1 method on graded and uniform meshes for a fractional-derivative problem in two and three dimensions. Math. Comp. 88, 2135–2155 (2019)
Luo, H., Li, B., Xie, X.: Convergence analysis of a Petrov-Galerkin method for fractional wave problems with nonsmooth data. J. Sci. Comput. 80, 957–992 (2019)
Li, L., Li, D.: Exact solutions and numerical study of time fractional Burgers’ equations. Appl. Math. Lett. 100, 106011 (2020)
Chen, H., Stynes, M.: Error analysis of a second-order method on fitted meshes for a time-fractional diffusion problem. J. Sci. Comput. 79(1), 624–647 (2019)
Li, B., Sun, W.: Error analysis of linearized semi-implicit Galerkin finite element methods for nonlinear parabolic equations. Int. J. Numer. Anal. Model. 10, 622–633 (2013)
Li, B., Sun, W.: Unconditional convergence and optimal error estimates of a Galerkin-mixed FEM for incompressible miscible flow in porous media. SIAM J. Numer. Anal. 51, 1959–1977 (2013)
Zhou, B., Li, D.: Newton linearized methods for semilinear parabolic equations. Numer. Math. Theor. Methods Appl. 13, 928–945 (2020)
Li, D., Wu, C., Zhang, Z.: Linearized Galerkin FEMs for nonlinear time fractional parabolic problems with non-smooth solutions in time direction. J. Sci. Comput. 80, 403–419 (2019)
Li, D., Wang, J., Zhang, J.: Unconditionally convergent \(L1\)-Galerkin FEMs for nonlinear time-fractional Schrödinger equations. SIAM. J. Sci. Comput. 39, A3067–A3088 (2017)
Maskari, M.A., Karaa, S.: Numerical approximation of semilinear subdiffusion equations with nonsmooth intial data. SIAM J. Numer. Anal. 57, 1524–1544 (2019)
Jin, B., Lazarov, R., Zhou, Z.: Numerical methods for time-fractional evolution equations with nonsmooth data: a concise overview. Comput. Methods Appl. Mech. Eng. 346, 332–358 (2019)
Liao, H., Mclean, W., Zhang, J.: A second-order scheme with nonuniform time steps for a linear reaction-sudiffusion problem (2019). https://arxiv.org/pdf/1803.09873.pdf
Thome, V.: Galerkin finite element methods for parabolic problems. J. Comput. Math. Appl. 17(2), 186–187 (2006)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is supported by NSFC (Grant Nos. 11771162, 11971010).
Rights and permissions
About this article

Cite this article
Zhou, B., Chen, X. & Li, D. Nonuniform Alikhanov Linearized Galerkin Finite Element Methods for Nonlinear Time-Fractional Parabolic Equations. J Sci Comput 85, 39 (2020). https://doi.org/10.1007/s10915-020-01350-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10915-020-01350-6