
Abstract
This paper studies the Galerkin finite element approximation of time-fractional Navier–Stokes equations. The discretization in space is done by the mixed finite element method. The time Caputo-fractional derivative is discretized by a finite difference method. The stability and convergence properties related to the time discretization are discussed and theoretically proven. Under some certain conditions that the solution and initial value satisfy, we give the error estimates for both semidiscrete and fully discrete schemes. Finally, a numerical example is presented to demonstrate the effectiveness of our numerical methods.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Let \(\varOmega \subset \mathbf {R}^2\) be a bounded and connected polygonal domain. We consider the following Navier–Stokes equations with a time fractional differential operator
where \(\alpha \in (0,1)\) is a fixed number and \(cD^{\alpha }_t\) is the Caputo fractional derivative(see Definition 2.1), \(u=(u_1,u_2)\) represents the velocity field, \(\nu >0\) is the viscosity coefficient, p is the associated pressure, \(u_0\) is the initial velocity and \(f=(f_1,f_2)\) is an external force.
The considered problem (1) is referred to as time-fractional Navier–Stokes equations (TFNSE for short) thereafter, which have many physical applications in many fields such as turbulence, heterogeneous flows and materials, viscoelasticity and electromagnetic theory. Particularly when \(\alpha =1\), the problem (1) reduces to the classical Navier–Stokes equations, numerical approximations of which have been studied by many authors [2, 7–10, 12–14, 16–27, 29–32, 34, 35, 40–43]. At the same time, for the time-fractional Navier–Stokes equations like (1), Carvalho-Neto and Planas [28] have proved the existence, uniqueness, decay, and regularity properties of mild solutions to TFNSE. Momani and Odibat [33] have discussed the analytical solution of a time-fractional Navier–Stokes equations by Adomian decomposition method in a tube. However, to the best of our knowledge, numerical analysis of such problems for time-fractional Navier–Stokes equations is missing in the literature. Therefore, this article aims to fill the gap and investigate the strong approximations of TFNSE like (1).
Recently, fractional calculus have attracted enough attention, because of its non-local property of fractional derivative(and integrals). As a result, a number of numerical techniques for fractional differential equations have been developed and their stability and convergence have been investigated, see e.g. [3–6, 11, 15, 37–39]. Jin et al. [4], by using piecewise linear functions, have studied two semidiscrete approximation schemes for the homogeneous time-fractional diffusion equation. Zeng et al. [15] have studied the second-order accurate schemes for the time-fractional diffusion equation with unconditional stability. Two fully discrete schemes are firstly proposed for the time-fractional sub-diffusion equation with space discretized by finite element and time discretized by the fractional linear multistep methods. Jiang and Ma [37] have proposed high-order methods for solving time-fractional partial differential equations. The proposed high-order method is based on high-order finite element method for space and finite difference method for time. Lin and Xu [38] have proposed the finite difference scheme in time and Legendre spectral methods in space for the numerical solution of time-fractional diffusion equation. Liu et al. [39] have discussed the numerical solutions of a time-fractional fourth-order reaction-diffusion problem with a nonlinear reaction term, which is based on a finite difference approximation in time direction and finite element method in spatial direction.
Our aim is to obtain strong convergence error estimates for both semidiscrete and fully discrete schemes for the problem (1). The discretization in space is done by the mixed finite element method. The main difficulty in the error analysis about space discretization stems from the term of fractional derivative \(cD^{\alpha }_t\) which makes the methods of energy type estimate and parabolic duality argument no more applicable. Following the idea of Heywood and Rannacher [25], firstly the velocity is split into two parts by introducing a linearized discrete problem with solution \(v_h\). In particular, by defining certain approximations \(S_hu\) of the solution of (1), the role of which is similar to that of a Ritz projection in treating the heat equation, using the Laplace transform techniques, as well as combing the propertied of the operator \(\overline{E}_h\) with the bilinear operator \(B(\cdot , \cdot )\), we derive the error estimate for the velocity. The time Caputo-fractional derivative is discretized by a finite difference method. The stability and convergence properties related to the time discretization are discussed and theoretically proven.
The structure of this paper is as follows: In Sect. 2, we introduce basic notations, give the definitions of the Caputo fractional differential operator and Mittag-Leffler function. In Sect. 3, we discuss the weak formulation, describe the semidiscrete Galerkin approximations about space and establish the error estimate for the velocity. In Sect. 4, we present several lemmas which play a crucial role in the proof of our main results. By discretizing the time-fractional derivative, we derive the fully discrete scheme for (1) and then give the error estimate for the fully discrete scheme. Finally, in Sect. 5, a numerical example is presented to demonstrate the effectiveness of our numerical methods.
2 Preliminaries
Throughout the paper, we denote as C a constant that may not be of the same form from one occurrence to another, even in the same line. In this section, we introduce basic notations, give the definitions of Mittag-Leffler function and the Caputo fractional differential operator.
We use the standard notation \(H^s(\varOmega ), \Vert \cdot \Vert _s, (\cdot , \cdot )_s, s\ge 0\) for the Sobolev spaces, the standard Sobolev norm and inner product, respectively. When \(s=0\), \(L^2(\varOmega )\) is written instead of \(H^0(\varOmega )\), the \(L^2\)-inner product and \(L^2\)-norm are separately denoted by \((\cdot , \cdot )\) and \(\Vert \cdot \Vert \). For the mathematical setting of problem (1), the following spaces
are introduced. Next, let the closed subset V of X be given by
and denote by H the closed subset of Y, i.e.,
Moreover, we define the continuous bilinear forms \(a(\cdot ,\cdot )\) and \(d(\cdot ,\cdot )\) on \(X\times X\) and \(X\times M\), respectively, by
and a bilinear operator \(B(\cdot ,\cdot )\) on \(X\times X\) by
At the same time, a trilinear form \(b(\cdot ,\cdot ,\cdot )\) on \(X\times X\times X\) is introduced by
which has the following properties(cf.,[25, 35]):
For the readers convenience, we recall the definitions of Mittag-Leffler function and the Caputo fractional differential operator. We shall use extensively the Mittag-Leffler function \(E_{\alpha ,\beta }(z)\) [1] defined by
where \(\varGamma (.)\) is the standard Gamma function defined as
Definition 1
[1] Let \(\alpha \in (0,1)\), the expression
is called the Caputo fractional derivative of order \(\alpha \) of the function u.
3 Space Semi-discretization
In this section, we will give the weak formulation of (1), describe the semidiscrete Galerkin approximations and then derive the error estimates for the velocity about space discretization. From now on, we denote by h with \(0<h<1\) a real positive discretization parameter tending to zero.
3.1 Semidiscrete Fractional Navier–Stokes Equations
With the notations in Sect. 2, the variational formulation of (1) is as follows: find \((u,p)\in (X,M)\) for all \(t\in [0,T]\) such that for all \((\phi ,q)\in (X,M)\)
We introduce the finite element subspace \((X_h,M_h)\) of \((X,M), Y_h\subset Y\) and define the subspace \(V_h\) of \(X_h\) given by
We assume that the couple \((X_h, M_h)\) satisfies the discrete LBB(or named inf-sup) condition
where \(\beta >0\) is a constant.
Let \(P_h:Y\rightarrow V_h\) denotes the \(L^2\)-orthogonal projection defined by
The operator \(\overline{E}_h(t)\) is introduced by
where \(\{\lambda _j^h\}_{j=1}^{N}\) and \(\{\varphi _j^h\}_{j=1}^{N}\) are respectively the eigenvalues and the eigenfunctions of the discrete Laplace operator \(-\varDelta _h\) defined by \(-(\varDelta _h\psi , \chi )=(\nabla \psi , \nabla \chi ),\ \ \forall \psi , \chi \in X_h.\)
For later use, we need the regularity result which is related to the operator \(\overline{E}_h(t)\) and collect the result in the next lemma.
Lemma 1
[3] Let \(\overline{E}_h(t)\) be defined by (4) and \(\psi \in X_h\). Then it holds that
The discrete analogue of weak formulation (2) now reads as follows: find \((u_h,p_h)\in (X_h,M_h)\) such that for all \((\phi _h,q_h)\in (X_h,M_h)\),
with \(u_h(0)=P_hu_{0}\).
For the discrete approximation, it is straightforward to verify that the trilinear term \(b(u_h,v_h,w_h)\) enjoys the following properties (cf. [41]):
3.2 Error Estimate for the Velocity
With \(V_h\) as above, we now introduce an equivalent Galerkin formulation. Find \(u_h\in V_h\) such that \(u_h(0)=P_hu_{0}\) and for \(t>0\)
Theorem 1
(Error estimate for space discretization) Let u and \(u_h\) be the solutions of (2) and (9), respectively. We suppose that the solution \(\{u,p\}\) of (2) satisfies the following regularity condition: \(\sup \limits _{t\in [0,T]}\{\Vert u\Vert _2+\Vert \nabla p\Vert \} \le C\), then the following estimate holds
We firstly dissociate the non-linearity by introducing an intermediate solution \(v_h\). Let \(v_h\) be a finite element Galerkin approximation to a linearised time-fractional Navier-Stokes equation satisfying
with \(v_h(0)=P_hu_{0}\).
Subsequently, the error is split as
Note that \(\xi \) is the error committed by approximating a linearized(Stokes) problem and \(\eta \) represents the error due to the presence of the nonlinearity in the equation.
Below, the estimate for \(\xi \) is derived. Firstly \(\xi \) is split into two parts \(\zeta \), the estimate of which is given, and \(\theta \). Because of the presence of the term of fractional derivative \(cD^{\alpha }_t\), the methods of energy type estimate and parabolic duality argument for \(\theta \) are no more suitable. By making use of the Laplace transform techniques and the property of analytic contraction semigroup that the Stokes operator \(A_h\) generates, we derive the error estimate for the \(\xi \).
Lemma 2
We suppose that the solution \(\{u,p\}\) of (2) satisfies the following regularity condition: \(\sup \limits _{t\in [0,T]}\{\Vert u\Vert _2+\Vert \nabla p\Vert \} \le C\), then for \(\xi =u-v_h\), we have the following estimate
Proof
Subtracting (10) from (2), the equation in \(\xi \) is written as
We now decompose \(\xi \) as
where \(S_hu\) is given by (4.52), [25]. Lemma 4.7, [25] tells us that
In order to complete the estimate for \(\xi \), we only need to estimate \(\theta \). The equation in \(\theta \) reads as
Making use of the definition of \(S_hu\), that is, \(a(\zeta , \phi _h)=(p,\nabla \cdot \phi _h)\), then the above equation can be simplified as
Let \(A=-\nu \varDelta \) and \(A_h\) is the discrete analogue of A, there holds
Taking the Laplace transform on both sides of the above equation, we recover
Therefore,
Because the Stokes operator \(A_h\) generates an analytic contraction semigroup [44] and then there exists a constant c which depends only on \(\phi \) and \(\alpha \) such that
where \(\varSigma _\theta =\{z\in \mathbb {C}:|\text{ arg } z|\le \phi \}\).
So there holds
Using the inverse Laplace transform yields
By the triangle inequality, we have
which completes the proof. \(\square \)
Subsequently, we give the main result in this section. By making use of the properties of the operator \(\overline{E}_h\) and the standard duality arguments, the methods of which are different from classical Navier-Stokes equations, we derive the error estimate for the velocity.
Proof of Theorem 1
Since \(e=u-u_h=(u-v_h)+(v_h-u_h)=\xi +\eta \) and the estimate of \(\xi \) is known from Lemma 2, it is enough to estimate \(\eta \). From (9) and (10), the equation for \(\eta \) becomes
with \(\eta (0)=0\).
Equivalently, the above equation can be recast as
By Duhamel’s principle(cf.[36]) and Lemma 1, one can derive that
Thus it is enough to estimate \(\Vert A_h^{-1/2}(B(u,u)-B(u_h,u_h))\Vert \). We proceed by the standard duality arguments, using the splitting
By the triangle inequality it yields
so that the proof is reduced to estimate each of the above negative norms on the right-hand side. Using the skew-symmetry property (7) and noticing \(\text {div} u=0\), one obtains for the first term:
Regarding the other term in (12), we derive
where, in the last inequality, we have used the Sobolev’s imbeddings \(\Vert \phi \Vert _{L^4}\le C\Vert \phi \Vert _1\) and the regularity condition of the solution \(u_h\).
It is obvious that there holds
Substituting (13) into (11), it is show that
By fractional Gronwall’s lemma [45], a use of the triangle inequality with Lemma 2 completes the rest of the proof. \(\square \)
4 Full Discretization
In this section, we will give the discretization of time Caputo-fractional derivative by a finite difference method, as well as the stability and convergence properties related to the time discretization. By collecting the convergence results for the space discretization and for the time discretization, the error estimate for fully discrete scheme of (1) has been obtained.
The time-fractional derivative \(cD^{\alpha }_tu\) is discretized by the first-order backward Euler scheme. We suppose \(t_n=n\triangle t, n=0, 1 ,\ldots , N ,\) in which \(\triangle t=\frac{T}{N}\) denotes the step of time. Then the time-fractional derivative in Eq. (1) at time point \(t=t_{n+1}\) can be approximated as [38]
where \(b_j=(j+1)^{1-\alpha }-j^{1-\alpha }\). The coefficients \(b_j\) possess the following properties:
-
(1)
\(b_j>0, j=0, 1, 2, \ldots , n\),
-
(2)
\(1=b_0>b_1>b_2>\ldots >b_n, b_n\rightarrow 0\) as \(n\rightarrow \infty \),
-
(3)
\(\sum _{j=0}^n(b_j-b_{j+1})+b_{n+1}=1\).
Let
then \(cD^{\alpha }_tu_h=L_t^\alpha u_h(x,t_{n+1})+r^{n+1}_{\varDelta t}\), where
And \(c_u\) depends on the the second derivative of u in time.
Using \(L_t^\alpha u_h(x,t_{n+1})\) as an approximation of \(cD^{\alpha }_tu_h\) in the Eq. (6), then we will get the fully discrete scheme of (1): find \((u_h^{n+1},p_h^{n+1})\in (X_h,M_h)\) such that for all \((\phi _h,q_h)\in (X_h,M_h)\),
where \(a_0=\varGamma (2-\alpha )\triangle t^\alpha \), \(f^{n+1}\) is the value of f at point \(t_{n+1}\).
Following [38], it will be useful to define the error term \(r^{n+1}\) by
Using (15), the error term \(r^{n+1}\) becomes
The stability analysis for the full discrete problem is given in the following lemma.
Lemma 3
The full discrete scheme (16) is unconditionally stable for \(0<\triangle t<T,\) and
holds.
Further, we have
Proof
Mathematical induction is used to prove the lemma. When \(\mathrm{n}=0\), the formulation (16) can be written as
Taking \(\phi _h=u_h^1\in X_h\) and \(q_h=p_h^1\in M_h\) in (21) and making use of the property (7) of \(b(u_h,v_h,w_h)\), there holds
Using the coercivity of \(a(u_h^1,u_h^1)\) and Schwarz inequality yield
that is,
Suppose \(\phi _h=u_h^j\in X_h, q_h=p_h^j\in M_h\), we have
Next, setting \(\phi _h=u_h^{n+1}\in X_h\) and \(q_h=p_h^{n+1}\in M_h\) in (16), and using the property (7) of \(b(u_h,v_h,w_h)\), one arrives at
Using the property of the coercivity of \(a(u_h^{n+1},u_h^{n+1})\) and Schwarz inequality once again, we deduce
which can be simplified as
Hence, by using the inductive hypothesis (22), we get
Making use of the properties of the coefficients \(b_j\), we obtain
which is (19).
The proof of (20) is similar to the proof of (19) by mathematical induction. Hence, we can omit it. The proof is completed. \(\square \)
The following lemma will play an important role in proving the error estimate about the time discretization.
Lemma 4
Let \(\nu >0\) is the viscosity coefficient and \(c_0\) is defined by (8). Suppose that
then we have
where \(a_0=\varGamma (2-\alpha )\triangle t^\alpha , e^n=u_h(t_n)-u_h^n\).
Proof
Under the assumption of (23), there holds
By making use of (20), we know that
in other words,
Besides, using the coercivity of \(a(e^{n},e^{n})\) and the property (8) of b, we obtain
The proof of the lemma is completed. \(\square \)
Remark 1
The condition (23) means that it requires a small initial data and small time step size.
The error analysis for the solution of the semi-discrete problem about time is discussed in the following theorem.
Theorem 2
(Error estimate for time discretization) Let \(u_h(t_n)\) be the solution of (6), \(\{u_h^n\}_{n=1}^N\) be the time-discrete solution of (16). Under the assumption of Lemma 4, then we have the following error estimate
The proof of Theorem 2 needs the following lemma.
Lemma 5
Under the assumption of Theorem 2, we have
Proof
Let \(e^n=u_h(t_n)-u_h^n, \tilde{e}^n=p_h(t_n)-p_h^n.\)
For \(n=0\), by combining (6), (16) and (17), the error equation can be read as
Taking \(\phi _h=e^1\in X_h\) and \(q_h=\tilde{e}^1\in M_h\) in the above equation and noting \(e^0=0\), we obtain
By Lemma 4 and Schwarz inequality, we get
This together with (18), gives
Suppose \(\Vert u_h-u_h^n\Vert \le C b_{n-1}^{-1}\varDelta t^2\) for \(n=1, 2, 3, \ldots , s.\) Next we prove \(n=s+1\). By combining (6), (16) and (17), the error equation can be written as
Let \(\phi _h=e^{n+1}\in X_h, q_h=\tilde{e}^{n+1}\in M_h\) in the Eq. (24), then we have
By Lemma 4 and Schwarz inequality, we deduce
By the induction assumption, the fact that \(b_j^{-1}/b_{j+1}^{-1}<1\) for all non-negative integer j and the properties of \(b_j\), it can be written as
The proof is completed. \(\square \)
Proof of Theorem 2
As in the way of [38], by the definition of \(b_n\), it can be obtained that
Introduce a function \(\varPsi (x):=x^{-\alpha }/(x^{1-\alpha }-(x-1)^{1-\alpha })\). Since \(\varPsi ^{\prime }(x)\ge 0\) for \(\forall x\ge 1\), therefore \(\varPsi (x)\) is increasing about x for all \(x>1\). This means that \(n^{-\alpha }b_{n-1}^{-1}\) increasingly tends to \(1/(1-\alpha )\) as \(1<n\rightarrow \infty \). It is to be noted that \(n^{-\alpha }b^{-1}_{n-1}=1\) for \(n=1\), hence it can be written as
For all n such that \(n\triangle t\le T\), we obtain
The proof is completed. \(\square \)
Next we will give the error estimate for the fully discrete scheme by collecting the convergence results for the space discretization and for the time discretization.
Theorem 3
(Error estimate for fully discrete scheme) Let \(\{u(t_n)\}_{t\in [0,T]}\) be the solution of (1) and let \(\{u_h^n\}_{n=1}^{N}\) be the solution of the scheme (16) with \(T=N\triangle t\). Under the assumption of Lemma 4, then there is \(C>0\) such that
Proof
The proof follows from Theorem 1 and Theorem 2 by the triangle inequality. We are no longer to repeat here. \(\square \)
5 Numerical Example
In order to demonstrate the effectiveness of our numerical methods, a numerical example is presented. The main purpose is to check the convergence behavior of the numerical solution with respect to the time step \(\varDelta t\) and the space step h used in the calculation.
We consider the following fractional burger equation
in which \(\varOmega =[0,1],\) and the source term f is chosen as
Then the exact solution is \(t^2 \text {sin}(\pi x)\).
We compute the errors in \(L^2\) discrete norm. And all the numerical results in the tables below are evaluated at T=1. The spatial and temporal meshes are taken uniform. The finite element method using piecewise-linear polynomials is used for the space and the scheme for time described in previous sections is used in the example.
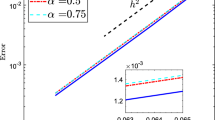
For the \(0<\alpha <1\) case, the theoretical convergence order is \(O(h^2+\varDelta t^{2-\alpha })\). In Table 1, for a fixed time step \(\varDelta t=1/500\) and some different spatial meshes, we can see the orders of convergence for u in \(L^2\)-norms are close to 2 which are accord with the spatial convergence order \(O(h^2)\). In Table 2, it shows that the errors between the exact solution and numerical solution and the convergence orders about \(\triangle t\) with different \(\alpha \) values for a fixed spatial step \(h=1/800\). The numerical results are consistent with our theoretical results in Theorem 3.
References
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam (2006)
Pani, A.K., Yuan, J.Y.: Semidiscrete finite element Galerkin approximations to the equations of motion arising in the Oldroyd model. IMA J. Numer. Anal. 25(4), 750–782 (2005)
Jin, B., Lazarov, R., Pasciak, J., Zhou, Z.: Error analysis of semidiscrete finite element methods for inhomogeneous time-fractional diffusion. IMA J. Numer. Anal. 35, 561–582 (2015)
Jin, B., Lazarov, R., Zhou, Z.: Error estimates for a semidiscrete finite element method for fractional order parabolic equations. SIAM J. Numer. Anal. 51(1), 445–466 (2012)
Jin, B., Lazarov, R., Liu, Y., Zhou, Z.: The Galerkin finite element method for a multi-term time-fractional diffusion equation. J. Comput. Phys. 281, 825–843 (2015)
Jin, B., Lazarov, R., Zhou, Z.: An analysis of the L1 scheme for the subdiffusion equation with nonsmooth data. IMA J. Numer. Anal. 33, 691–698 (2015)
Guo, B.Y., Jiao, Y.J.: Spectral method for Navier–Stokes equations with slip boundary conditions. J. Sci. Comput. 58, 249–274 (2014)
Bernardi, C., Raugel, G.: A conforming finite element method for the time-dependent Navier–Stokes equations. SIAM J. Numer. Anal. 22(3), 455–473 (1985)
Févrière, C., Laminie, J., Poullet, P., Poullet, P.: On the penalty-projection method for the Navier-Stokes equations with the MAC mesh. J. Comput. Appl. Math. 226, 228–245 (2009)
Min, C.H., Gibou, F.: A second order accurate projection method for the incompressible Navier–Stokes equations on non-graded adaptive grids. J. Comput. Phys. 219, 912–929 (2006)
Li, C.P., Zhao, Z.G., Chen, Y.Q.: Numerical approximation of nonlinear fractional differential equations with subdiffusion and superdiffusion. Comput. Math. Appl. 62(3), 855–875 (2011)
Brown, D.L., Cortez, R., Minion, M.L.: Accurate projection methods for the incompressible Navier–Stokes equations. J. Comput. Phys. 168(2), 464–499 (2001)
Goswami, D., Damázio, P. D.: A two-level finite element method for time-dependent incompressible Navier–Stokes equations with non-smooth initial data. arXiv:1211.3342 [math.NA]
Burman, E.: Pressure projection stabilizations for Galerkin approximations of Stokes and Darcys problem. Numer. Methods Partial Differ. Equ. 24, 127–143 (2008)
Zeng, F.H., Li, C.P., Liu, F.W., Turner, I.: Numerical algorithms for time-fractional subdiffusion equation with second-order accuracy. SIAM J. Sci. Comput. 37, 55–78 (2015)
Tone, F.: Error analysis for a second order scheme for the Navier–Stokes equations. Appl. Numer. Math. 50(1), 93–119 (2004)
Baker, G.A.: Galerkin Approximations for the Navier–Stokes Equations. Harvard University, Cambridge (1976)
Johnston, H., Liu, J.G.: Accurate, stable and efficient Navier–Stokes solvers based on explicit treatment of the pressure term. J. Comput. Phys. 199(1), 221–259 (2004)
Okamoto, H.: On the semi-discrete finite element approximation for the nonstationary Navier–Stokes equation. J. Fac. Sci. Univ. Tokyo Sect. A Math. 29(3), 613–651 (1982)
Frutos, J.D., Garca-Archilla, B., Novo, J.: Optimal error bounds for two-grid schemes applied to the Navier–Stokes equations. Appl. Math. Comput. 218(13), 7034–7051 (2012)
Kim, J., Moin, P.: Application of a fractional-step method to incompressible Navier–Stokes equations. J. Comput. Phys. 59(2), 308–323 (1985)
Shen, J.: On error estimates of projection methods for the Navier–Stokes equations: second order schemes. Math. Comput. 65, 1039–1065 (1996)
Heywood, J.G., Rannacher, R.: Finite element approximation of the nonstationary Navier-Stokes problem, part III. Smoothing property and higher order error estimates for spatial discretization. SIAM J. Numer. Anal. 25(3), 489–512 (1988)
Heywood, J.G., Rannacher, R.: Finite element approximation of the nonstationary Navier–Stokes problem Part IV: error analysis for second-order time discretization. SIAM J. Numer. Anal. 27, 353–384 (1990)
Heywood, J.G., Rannacher, R.: Finite element approximation of the nonstationary Navier–Stokes problem. I. Regularity of solutions and second-order spatial discretization. SIAM J. Numer. Anal. 19, 275–311 (1982)
Shan, L., Hou, Y.: A fully discrete stabilized finite element method for the time-dependent Navier–Stokes equations. Appl. Math. Comput. 215(1), 85–99 (2009)
Huang, P., Feng, X., Liu, D.: A stabilized finite element method for the time-dependent stokes equations based on Crank–Nicolson scheme. Appl. Math. Model. 37(4), 1910–1919 (2013)
Carvalho-Neto, P.M.D., Planas, G.: Mild solutions to the time fractional Navier–Stokes equations in \(\mathbf{R}^N\). J. Differ. Equ. 259(7), 2948–2980 (2015)
Liu, Q., Hou, Y.: A two-level finite element method for the Navier–Stokes equations based on a new projection. Appl. Math. Model. 34(2), 383–399 (2010)
Nochetto, R.H., Pyo, J.H.: The gauge–uzawa finite element method. Part I. SIAM J. Numer. Anal. 43, 1043–1068 (2005)
Rannacher, R.: Numerical analysis of the Navier–Stokes equations. Appl. Math. 38, 361–380 (1993)
Temam, R.: Navier–Stokes Equations, Theory and Numerical Analysis. North-Holland, Amsterdam (1984)
Momani, S., Odibat, Z.: Analytical solution of a time-fractional Navier–Stokes equation by Adomian decomposition method. Appl. Math. Comput. 177, 488–494 (2006)
Chacón Rebollo, T., Gómez, T., Mármol, M.: Numerical analysis of penalty stabilized finite element discretizations of evolution Navier–Stokes equations. J. Sci. Comput. 63, 885–912 (2015)
Girault, V., Raviart, P.A.: Finite Element Methods for Navier–Stokes Equations: Theory and Algorithms. Springer-Verlag, Berlin, Heidelberg (1986)
Thomée, V.: Galerkin Finite Element Methods for Parabolic Problems, Spriger Series in Computational Mathematics, vol. 25. Springer-Verlag, Berlin, Heidelberg (1997)
Jiang, Y., Ma, J.: High-order finite element methods for time-fractional partial differential equations. J. Comput. Appl. Math. 235(11), 3285–3290 (2011)
Lin, Y., Xu, C.: Finite difference/spectral approximations for the time-fractional diffusion equation. J. Comput. Phys. 225(2), 1533–1552 (2007)
Liu, Y., Du, Y., Li, H., He, S., Gao, W.: Finite difference/finite element method for a nonlinear time-fractional fourth-order reaction-diffusion problem. Comput. Math. Appl. 70(4), 573–591 (2015)
He, Y.N., Li, J.: Convergence of three iterative methods based on the finite element discretization for the stationary Navier–Stokes equations. Comput. Methods Appl. Mech. Eng. 198, 1351–1359 (2009)
He, Y.N., Sun, W.W.: Stability and convergence of the Crank-Nicolson/Adams-Bashforth scheme for the time-dependent Navier–Stokes equations. SIAM J. Numer. Anal. 45(2), 837–869 (2007)
He, Y., Huang, P., Feng, X.: \(H^2\)-stability of the first order fully discrete schemes for the time-dependent Navier–Stokes equations. J. Sci. Comput. 62(1), 230–264 (2015)
Luo, Z.D.: A new finite volume element formulation for the non-stationary Navier–Stokes equations. Adv. Appl. Math. Mech. 6, 615–636 (2014)
Giga, Y.: Analyticity of the semigroup generated by the stokes operator in \(L_r\) spaces. Math. Z. 178(3), 297–329 (1981)
Rui, A.C., Ferreira, R.: A discrete fractional Gronwall inequality. Proc. Am. Math. Soc. 140(5), 1605–1612 (2012)
Acknowledgments
The authors want to thank Prof. Yang Liu, Inner Mongolia University, China, for his kindness and help with the numerical example. The authors would like to express their sincere gratitude to the anonymous reviewers for their careful reading of the manuscript, as well as their comments that lead to a considerable improvement of the original manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
This research is supported by the National Natural Science Foundation of China under Grant 61271010 and by Beijing Natural Science Foundation under Grant 4152029.
Rights and permissions
About this article

Cite this article
Li, X., Yang, X. & Zhang, Y. Error Estimates of Mixed Finite Element Methods for Time-Fractional Navier–Stokes Equations. J Sci Comput 70, 500–515 (2017). https://doi.org/10.1007/s10915-016-0252-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10915-016-0252-3