
Abstract
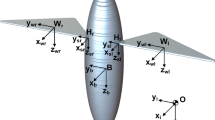
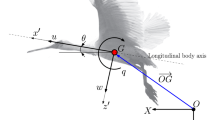
In this work, we present a new mathematic model for the flight of a bird-scale flapping-wing aerial vehicle, in which the impacts of the wing inertia and its deformations are considered. Based on this model, the longitudinal and later-directional orbit stability of the vehicle at uncontrolled condition are proved to be steady via Floquet Theory combined with the untethered flight experiment. However, both simulation and experiment show that the vehicle presents a periodical motion state which is similar to spiral flight at uncontrolled condition. At this spiral-like flight state, the yaw angle of the vehicle varies constantly, which makes it difficult to meet the requirements of the general flight mission. In this case, two independent PID controllers are designed to stabilize the vehicle attitude based on the approximate linear model in the vicinity of the equilibrium flight condition. And the controlled flight of the vehicle prototype is also proved to be stable through numerical calculation and physical experiment.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Availability of data and material
The datasets used or analysed during the current study are available from the corresponding author on reasonable request.
Code Availability
The raw/processed data required to reproduce these findings cannot be shared at this time as the data also forms part of an ongoing study.
References
Shyy, W., Aono, H., Kang, C.K., et al.: An Introduction to Flapping Wing Aerodynamics. Cambridge University Press, Cambridge (2013)
Wood, R.J.: The first takeoff of a biologically inspired at-scale robotic insect. IEEE Trans. Robot. 24(2), 341–347 (2008)
De Croon, GCHE , Perçin, M., Remes, B., Ruijsink, R., De Wagter, C.: The DelFly: design, aerodynamics, and artificial intelligence of a flapping wing robot. Springer Publishing Company Incorporated (2015)
Keennon, M., Klingebiel, K., Won, H.: Development of the nano hummingbird: a tailless flapping wing micro air vehicle. In: 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition (2012)
Gerdes, J., Holness, A., Perez-Rosado, A., et al.: Robo raven: a flapping-wing air vehicle with highly compliant and independently controlled wings. Soft Robotics 1(4), 275–288 (2014)
Send, W., Fischer, M., Jebens, K., et al.: Artificial hinged-wing bird with active torsion and partially linear kinematics. In: 28th International congress of the aeronautical sciences (2012)
Ramezani, A., Shi, X., Chung, S.J., et al.: Bat Bot (B2), a biologically inspired flying machine. In: 2016 IEEE international conference on robotics & automation, 3219–3226 (2016)
Shyy, W., Kang, C.K., Chirarattananon, P., et al.: Aerodynamics, sensing and control of insect-scale flapping-wing flight. Proceedings Mathematical Physical & Engineering Sciences 472, 20150712 (2016)
Bulka, E., Nahon, M.: Automatic control for aerobatic maneuvering of agile fixed-wing UAVs. J. Intell. Robot. Sys. 93, 85–100 (2019)
Mendoza-Mendoza, J., Gonzalez-Villela, V.J., Aguilar-Ibanez, C., et al.: Snake aerial manipulators: a review. IEEE Access 8, 28222–28241 (2020)
Orlowski, C.T., Girard, A.R.: Dynamics, stability, and control analyses of flapping wing micro-air vehicles. Progress in Aerospace Sciences 51, 18–30 (2012)
Taha, H.E., Hajj, M.R., Nayfeh, A.H.: Flight dynamics and control of flapping-wing MAVs: a review. Nonlinear Dynamics 70(2), 907–939 (2012)
Etkin, B., Teichmann, T.: Dynamics of Flight: Stability and Control. Wiley (1982)
Khan, Z., Agrawal, S.: Modeling and simulation of flapping wing micro air vehicles. In: 2005 ASME International Design Engineering Technical Conferences (2005)
Duan, H., Li, Q.: Dynamic model and attitude control of flapping wing micro aerial vehicle. In: 2009 IEEE International Conference on Robotics and Biomimetics, pp 451–456 (2009)
Lasek, M., Sibilski, K.: Modelling and simulation of flapping wing control for a micromechanical flying insect (entomopter). In: AIAA Modeling and Simulation Technologies Conference and Exhibit (2002)
Grauer, J.A., Hubbard, J.E.: Multibody model of an ornithopter. J. Guid. Control Dyn. 32 (5), 1675–1679 (2009)
Orlowski, C.T., Girard, A.R.: Modeling and simulation of nonlinear dynamics of flapping wing micro air vehicles. AIAA J. 49(5), 969–981 (2011)
Pfeiffer, A., Lee, J., Han, J., et al.: Ornithropter flight simulation based on flexible multi-body dynamics. J. Bionic Eng. 7, 102–111 (2010)
Taylor, G.K., Thomas, A.L.R.: Dynamic flight stability in the desert locust Schistocerca gregaria. J. Exp. Biol. 206(16), 2803–2809 (2003)
Sun, M., Xiong, Y.: Dynamic flight stability of a hovering bumblebee. J. Exp. Biol. 208, 447–459 (2005)
Bolender, M.: Open-loop stability of flapping flight in hover. In: AIAA Guidance, Navigation, and Control Conference (2010)
Dietl, J.M., Garcia, E.: Stability in Ornithopter Longitudinal Flight Dynamics. J. Guid. Control Dyn. 31(4), 1157–1162 (2008)
Lee, J.S., Kim, J.K., Kim, D.K., et al.: Longitudinal Flight Dynamics of Bio-Inspired Ornithopter Considering Fluid-Structure Interaction. J. Guid. Control Dyn. 34(3), 667–677 (2011)
Kim, J.K., Lee, J.S., Han, J.H.: Passive Longitudinal Stability in Ornithopter Flight. J. Guid. Control Dyn. 35(2), 669–674 (2012)
Stanford, B., Beran, P., Patil, M.: Optimal Flapping-Wing Vehicle Dynamics via Floquet Multiplier Sensitivities. J. Guid. Control Dyn. 36(2), 454–466 (2013)
Bhatia, M., Patil, M., Woolsey, C., et al.: Stabilization of Flapping-Wing Micro-Air Vehicles in Gust Environments. J. Guid. Control Dyn. 37(2), 592–607 (2014)
Liu, T., Kuykendoll, K., Rhew, R., et al.: Avian wing geometry and kinematics. AIAA J. 44(5), 954–963 (2006)
Ramamurti, R., Sandberg, W.C.: A three-dimensional computational study of the aerodynamic mechanisms of insect flight. J. Exp. Biol. 205, 1507–1518 (2002)
Sun, M.: Lift and power requirements of hovering flight in Drosophilavirilis. J. Exp. Biol. 205 (16), 2413–2427 (2002)
Dickinson, M.H., Lehmann, F.O., Sane, S.P.: Wing rotation and the aerodynamics basis of insect flight. Science 248(5422), 1954–1960 (1999)
Willmott, A.P., Ellington, C.P., Thomas, A.L.R.: Flow visualization and unsteady aerodynamics in the flight of the hawkmoth, Manduca sexta. Philosophical Transactions of the Royal Society B: Biological Sciences 352, 303–316 (1997)
Deng, X., Schenato, L., Wu, W.C., et al.: Flapping flight for biomimetic robotic insects: Part I - System modeling. IEEE Trans. Robot. 22(4), 776–788 (2006)
Strogatz, S.H.: Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering. Westview Press (2015)
Acknowledgements
This research work was supported by the National Key Research and Development Program of China under Grant 2017YFB1300101.
Funding
This research work was funded by the National Key Research and Development Program of China under Grant 2017YFB1300101.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by Yaolei Shen and Pu Miao. The first draft of the manuscript was written by Yaolei Shen and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
This research work did not involve humans participants or animals. Hence, ethics approval, Consent to participate and Consent for publication are not applicable.
Conflict of Interests
The authors declare that they have no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shen, Y., Ge, W. & Miao, P. Multibody-Dynamic Modeling and Stability Analysis for a Bird-scale Flapping-wing Aerial Vehicle. J Intell Robot Syst 103, 9 (2021). https://doi.org/10.1007/s10846-021-01436-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10846-021-01436-9