
Abstract
In this paper, we employ some ansatz transformations to investigate various nonlinear waves for a well-known model, the generalized reaction Duffing model, including lump soliton, rogue waves, breather waves, Ma-breather, and Kuznetsov-Ma-breather. The standard Duffing equation is expanded upon in the generalized Duffing model, which adds more terms to take into consideration for more complex behaviors. The generalized reaction Duffing model is useful in many domains, such as electrical engineering, biomechanics, climate research, seismic research, chaos theory, and many more, due to its rich behavior and nonlinear dynamic. Lump soliton is a robust, confined, self-reinforcing wave solution to non linear partial differential equations. Breather waves are periodic, specific solutions in nonlinear wave systems that preserve their amplitude and structure. Rogue waves, which pose a hazard to marine safety, are unexpectedly strong and sharp ocean surface waves that diverge greatly from the surrounding wave pattern. They frequently appear in solitary and apparently random situations. The solutions are graphically displayed using contour, 3D, and 2D graphs.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
A vast variety of scientific phenomena can be modeled, examined, and explained with the use of nonlinear partial differential equations (NLPDEs). A lively area of research that is essential for comprehending the applications of nonlinear partial differential equations (NLPDEs) in practical settings is the investigation of exact solutions to these equations [1,2,3,4]. The role of non-linearity in waves is extremely essential generally over nonlinear sciences; advancing the study of exact solutions to PDEs has been top priority in recent years. Therefore, the finding of accurate analytical solutions for NLPDEs remains one of the foremost topics of popular interest. The majority of previous studies have focused on creating novel approaches to existing techniques in order to generate fresh, exact analytical frameworks that may specify challenging and intricate physical implementations. The majority of research has seemed to be based on direct methods to determine exact analytical solutions for NLPDEs in the last few years, regardless of whether this is due to the development of symbolic computational programs that help us to perform laborious and complex calculations on computer systems. Moreover, a number of potent, effective, and credible techniques have been developed to find analytical solutions for travelling waves, such as exp-function technique [5, 6], there are multiple techniques to observe the voltage in transmission line problems [7], the sine-cosine approach [8, 9], the Lie symmetry analysis scheme [10, 11], the sine-Gordon expansion technique [12, 13], tanh approach [14, 15], the modified Kudryashov method [16,17,18], the extended hyperbolic function approach [19, 20], and many others [21,22,23,24,25]. Zhao et al. studied lump chain solutions of the \((2+1)\)-dimensional Bogoyavlenskii-Kadomtsev-Petviashvili (BKP) equation [26]. Recently, Zhao and He investigated an integrable \((2+1)\)-dimensional generalized KdV equation using Hirota’s bilinear method [27]. Recent developments in the field of soliton dynamics extend across several scientific fields and technology domains. In the field of optics, scientists are working to improve modulation strategies for soliton-based communication networks to increase data speeds and improve signal integrity [28, 29]. Furthermore, the study of solitons in plasma physics has significance for comprehending the dynamics of magnetized plasma and space weather [30]. Experiments in the field of Bose-Einstein condensates (BECs) are providing important insights into soliton behavior and explain phenomena such as quantum turbulence and superfluidity [31, 32].
In this research, lump soliton (LS), rogue waves (RWs), breather waves (BWs), Ma-breather, and Kuznetsov-Ma-breather solutions of generalized reaction Duffing model (gRDM) are found by using distinct types of ansatz transformations. The innovative aspect of the research is the utilization of tailored ansatz transformations for the generalized reaction Duffing model. A deeper investigation of the behaviors and dynamics of the system is made possible by these customized transformations, which allow the study to examine particular wave phenomena that are exclusive to this model. The transformations employed in the article for studying nonlinear waves in the generalized reaction Duffing model present several challenges and areas for improvement when compared to the methods discussed in the reference. One significant challenge is the complexity of the ansatz transformations used in the paper, which can require complex computations and careful parameter selection. Lump waves (LWs) have been observed in many domains as superior nonlinear wave occurrences. LWs are considered to be a particular type of soliton that propagate with more energy than regular solitons. As a result, LWs have the potential to be disastrous in some systems, such as the financial and oceanic domains. Finding and anticipating LWs in real-world applications is crucial. In a variety of disciplines, including as solid-state physics, quantum mechanics, and electromagnetic, the lump soliton solutions are useful for the mathematical description of wave phenomena. These solutions appear as localized energy concentrations in the wave, and are solutions to specific NLEEs. They shed light on the stability of plasma in fusion experiments as well as the structure of plasma waves. In order to more fully comprehend extreme wave events and their effects on the ecosystem, the RWs are investigated. Early warning mechanisms and maritime operations readiness are aided by this modeling. Designing coastal infrastructure, such as wind turbines and oil rigs, to withstand the impact of rogue waves requires an understanding of these waves. The investigation of breathers advances knowledge of nonlinear wave dynamics in general. They provide information about the behavior of waves in the presence of nonlinear influences. They are fundamental to the theory of soliton, which is applied in domains such as water waves and optical fibers. The behavior of some materials, especially those having nonlinear features, can be modeled and studied using the BWs in material science. There is a wide variety of NLPDEs that are specifically designed to explain various physical phenomena. There are two forms of freak waves in nonlinear media, the Ma-breathers and the Kuznetsov-Ma (KM) breathers [33, 34]. The Ma-breather is a localized, explicit periodic solution. For instance, Ma-breathers are present in the generalized Boussinesq equation. KM breather, also known as KM soliton, was discovered for the first time in the 1970. KM breather, often referred to as “temporal periodic breather” [35], is localized in space and periodic in temporal variable. It does not exhibit a traveling wave. In this manuscript, some ansatz transformations will be applied to obtain the multiple soliton such as, rogue waves, lump soliton, breather waves, Ma-breather, and Kuznetsov-Ma-breather solutions of the generalized reaction Duffing model (gRDM) of the form
where a, b, c, and d are all constants. The wave profile is represented by w, and the spatial and temporal coordinates are depicted by the independent variables x and t. The behavior of specific dynamic systems can be described mathematically by the generalized reaction-Duffing model, which is utilized in nonlinear dynamics and employed in physics, engineering, and biology. Researchers are interested in this model because it can display a broad range of complicated behaviors, and it is a generalization of several well-known physics equations. The Duffing equation has its origins in the work of German mathematician and engineer Georg Duffing, who developed the idea of the Duffing oscillator in the early 20th century. The motion of a damped driven oscillator is described by the second-order nonlinear differential equation known as the Duffing oscillator. Based on the basic Duffing equation, the generalized reaction Duffing model has additional nonlinear features and reaction-diffusion components. A more thorough investigation of nonlinear dynamics and wave propagation in physical systems is made possible by this expansion. The gRDM has been studied by researchers to find novel periodic solutions, shock waves, solitary waves, and other intriguing characteristics. The analysis of this model has shed light on the interactions between solitary waves, the dynamics of nonlinear systems, and the impact of various coefficients on wave propagation. The rest of the paper is organized as follows: In Section 2, the lump soliton solution will be obtained. In Section 3, rogue waves solution will be obtained. In Section 4, the breather waves solution will be studied. In Section 5, types of breather waves will be provided. In Section 6, we will discuss our results. The conclusion will be provided in Section 7.
2 Lump Soliton Solution
In this section, we will find the lump soliton solutions of proposed model. Among the several exact solutions, lump solutions are a type of rational function solution to nonlinear partial differential equations (NLPDEs) that are localized in all directions in the space. The lump soliton solution can be found by applying the following transformation:
The lump soliton solution of (1) can be found using (2), which will yield the bilinear form of the equation.
Now, using the function \({\zeta _1}\), \({\zeta _2}\) and f given as [36]:
where \(1 \le {a_i} \le 7\), are the real parameters to be found. After replacing f into (3), we are able to derive the subsequent sets of parameters by eliminating the coefficients of x and t.
When \({a_1}={a_6}=0\), we obtain the following solutions:
By using the above values in (2), we get
where
Here, a few graphical representations of the above solution are examined.
3 Rogue Waves Solution
Rogue waves, sometimes referred to as freak, monster, or killer waves, are unusually huge, erratic, and abruptly arising surface waves that pose a serious risk to ships, including large ones. They are frequently nearly undetectable in deep waters and are brought on by the displacement of water as a result of other occurrences, such as earthquakes. Due to their unpredictable nature and powerful impact, they might appear suddenly. The following transformation will be used for rogue wave solution:
where \(1 \le {a_i} \le 7\), \({b_1}\), \({b_2}\), and \({m_1}\) are real parameters to be determined. Inserting (6) into (3) will provide the specific equations that yield parameter values.
When \({a_1}= {b_2}={a_6}=0\), we obtain the following solutions:
By substituting the above values in (2), yields
where
Here, a few graphical representations of the above solution are examined.
4 Breather Waves Solution
This section will provide the breather wave (BW) solution for (1). Breathers are nonlinear waves characterized by localized, oscillating energy concentrations. Breathers are solitonic structures. A breather soliton can be found in several natural scientific subfields, including solid-state physics, chemistry, plasma physics, fluid dynamics, nonlinear optics, and molecular biology. The following transformation will be applied for breather wave solutions:
where \(m_1, m_2, \) and \(a_i\) are real parameters to be determined. By inserting (8) into (3), some equations that yield coefficient values are found.
When \({a_2}= {a_6}=0\), the subsequent solutions are obtained:
By inserting the above values in (2), we get
where
Here, a few graphical representations of the above solution are examined.
5 Types of Breather
In this section Ma-Breathers and Kuznetsov-Ma-Breathers solutions for (1) are discussed.
5.1 Ma-breather
The Ma-breather is a localized, explicit periodic solution. For instance, Ma-breathers are present in the generalized Boussinesq equation. The following transformation will be used for Ma-Breather:
where \({a_1}\), \({p_1}\), \({k_1}\), \({k_2}\), and \({m_1}\) are real parameters. By inserting (10) into (3), some equations are obtained to determine coefficient values. The subsequent solutions are then derived:
By substituting the above values in (2), we get
where
Here, a few graphical representations of the above solution are examined.
5.2 Kuznetsov-Ma-breather
The Kuznetsov-Ma breather is an explicit time-periodic solution. For instance, Kuznetsov-Ma breathers are present in the fully integrable Ablowitz-Ladik (AL) model. The following transformation will be used for Kuznetsov-Ma-Breather:
where \({a_1}\), \({p_1}\), p, \({a_2}\), and \({b_1}\) are real parameters. Certain equations that yield coefficient values can be acquired by inserting (12) into (3). The subsequent solutions are obtained:
By substituting the above values in (2), we get
where
Here, a few graphical representations of the above solution are examined.
6 Result and Discussion

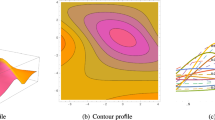
The visual depiction of w(x, t) for (5) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \({a_4} = - 0.5\), \({a_2} = 0.5\), \(a = -0.5\), \(b = 0.5\), \(c = 0.5\), \(d=5\)

The visual depiction of w(x, t) for (5) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \({a_4} = 0.5\), \({a_2} = -0.5\), \(a = 0.7\), \(b = 5.5\), \(c = -0.5\), \(d=20.5\)

The visual depiction of w(x, t) for (5) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \({a_4} = 0.5\), \({a_2} = 0.5\), \(a = -0.7\), \(b = -0.5\), \(c = 6.5\), \(d=10.5\)

The visual depiction of w(x, t) for (7) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \({a_5}=0.9\), \( {a_7}=-0.5\), \( {m_1}=5.25\), \( {b_2}=-0.7\), \(c = -2.5\), \(a = -0.05\), \(a_2 = -1.5\), \(a_3 = 5.5\), \(b=0.3\)

The visual depiction of w(x, t) for (7) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \({a_5}=-0.9\), \( {a_7}=0.5\), \( {m_1}=3.25\), \( {b_2}=-0.7\), \(c = -2.5\), \(a = -0.05\), \(a_2 = 1.5\), \(a_3 = -1.5\), \(b=0.3\)

The visual depiction of w(x, t) for (7) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \({a_5}=-0.9\), \( {a_7}=0.5\), \( {m_1}=5.25\), \( {b_2}=0.7\), \(c = -0.5\), \(a = -0.05\), \(a_2 = -1.5\), \(a_3 = -5.5\), \(b=0.5\)
The generalized reaction Duffing model has been extensively studied.The functional variable approach was developed by Attaf et al. [37, 38] to provide analytical solutions for an extensive variety of linear and nonlinear wave equations.Numerous authors improved this technique [39, 40].Aminikhah et al. studied gRDM to acquire the exact solutions using functional variable approach [41].Tian and Gao [42] studied gRDM to obtain soliton solutions by using generalized hyperbolic-function approach.In this research, we studied generalized reaction Duffing model for lump soliton, rogue waves, breather waves, Ma-breather, and Kuznetsov-Ma-breather by using some distinct ansatz transformations.In the generalized reaction Duffing model, the derived results provide significant insights into the behavior of nonlinear waves.
The found solutions, including breather waves, rogue waves, and lump solitons, have real-world applications in a variety of disciplines, including material science, quantum mechanics, solid-state physics, and electromagnetic studies. These solutions can be used to represent nonlinear wave dynamics and describe localized energy concentrations in waves. In Figs. 1, 2, and 3, the lump soliton solutions of w are obtained. Figure 1(a) depicts 3D profile of w that illustrates bright face of lump solution. Figure 2(a) depicts 3D profile of w that illustrates two bright faces of lump solution. Figure 3(a) depicts 3D profile of w that illustrates one dark and one bright face of solution. In Fig. 1(b) depicts contour profile of w. Figure 1(c) depicts 2D profile of w. Figures 2 and 3 also describe the same properties of w.
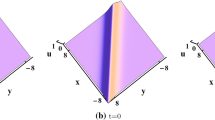
In Fig. 4, (a) depicts the appearance of some non-periodic waves, Fig. 5(a) depicts the appearance of a large, bright lump wave. Fig. 6 (a) shows bright and dark faces of rogue wave solution. In Figs. 4, 5 and 6(b) depicts contour profile and (c) depicts 2D profile of w. In Figs. 7, 8, 9, 10, 11 and 12(a) shows several bright and dark solitons as well as a periodic wave, (b) depicts contour profile and (c) depicts 2D profile of w. In Fig. 13, (a) depicts 3D profile of w which describes 2 bright faces of solution. Figure 13(b) depicts contour profile and (c) depicts 2D profile of w. In Fig. 14, (a) depicts 3D profile of w which also describes 2 bright faces of solution. Figure 14(b) depicts contour profile and (c) depicts 2D profile of w. In Fig. 15, (a) depicts 3D profile of w which describes 2 bright and one dark faces of solution. Figure 15(b) depicts contour profile and (c) depicts 2D profile of w.

The visual depiction of w(x, t) for (9) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \(q=0.5\), \(b = -0.09\), \({m_2} =-0.5\), \({q_1} = -1.5\), \(a_3 = -0.5\), \(a = 0.5\), \(c = -0.5\), \(d = 10\)

The visual depiction of w(x, t) for (9) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \(q=0.05\), \(b = -0.1\), \({m_2} =0.05\), \({q_1} = 1.5\), \(a_3 = 0.5\), \(a = -0.5\), \(c = 0.5\), \(d = 10\)

The visual depiction of w(x, t) for (9) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \(q=0.5\), \(b = -0.09\), \({m_2} =0.05\), \({q_1} = -0.5\), \(a_3 = 0.5\), \(a = -0.5\), \(c = 0.5\), \(d = 10\)

The visual depiction of w(x, t) for (11) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \({p_1}=0.7\), \({k_2}=1.5\), \(a=4\), \(c=0.5\), \(d=10\), \({a_1}=1\)

The visual depiction of w(x, t) for (11) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \({p_1}=-0.5\), \({k_2}=-0.5\), \(a=-4\), \(c=-0.5\), \(d=10\), \({a_1}=1\)

The visual depiction of w(x, t) for (11) is given.(a) 3D profile (b) contour profile (c) 2D profile, when \({p_1}=0.5\), \({k_2}=0.5\), \(a=-4\), \(c=0.5\), \(d=10\), \({a_1}=1\)

The visual depiction of w(x, t) for (13) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \(b=0.5\), \({a_1}=-10.5\)

The visual depiction of w(x, t) for (13) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \(b=0.7\), \({a_1}=15.5\)

The visual depiction of w(x, t) for (13) is given. (a) 3D profile (b) contour profile (c) 2D profile, when \(b=0.5\), \({a_1}=-2.5\)
7 Conclusions
In this paper, we applied some ansatz transformations to the generalized reaction Duffing model in order to derive the innovative soliton solutions such as lump soliton, rogue waves, breather waves, Ma-breather and Kuznetsov-Ma-breather. In non linear evaluation equations, the lump soliton is a form of solitary wave solution. Rogue wave represents for rare and exceptionally large solutions to non linear waves equations in mathematics. These waves have attracted a lot of attention because of their severe and erratic in nature. By customizing the ansatz transformations to the characteristics of this specific dynamical system, the research uncovers the complex nonlinear behaviors and dynamics that may not be easily observable using standard methods. By selecting appropriate parameter values, specific findings are displayed in 2D, 3D, and contour profiles to illustrate the physical behavior of solutions. Finally, in the results and discussion section, we present the geometry of our solutions.
Data Availability
No datasets were generated or analysed during the current study.
References
Iqbal, M., Seadawy, A.R., Lu, D.: Applications of nonlinear longitudinal wave equation in a magneto-electro-elastic circular rod and new solitary wave solutions. Modern Phys. Lett. B. 33(18), 1950210 (2019)
Wazwaz, A.M.: Partial differential equations and solitary waves theory. Springer Science & Business Media (2010)
Ansar, R., Abbas, M., Mohammed, P.O., Al-Sarairah, E., Gepreel, K.A., Soliman, M.S.: Dynamical study of coupled Riemann wave equation involving conformable, beta, and M-truncated derivatives via two efficient analytical methods. Symmetry 15(7), 1293 (2023)
HamaRashid, H., Srivastava, H.M., Hama, M., Mohammed, P.O., Almusawa, M.Y., Baleanu, D.: Novel algorithms to approximate the solution of nonlinear integro-differential equations of Volterra-Fredholm integro type. AIMS Math. 8, 14572–14591 (2023)
Tasbozan, O., Çenesiz, Y., Kurt, A., Baleanu, D.: New analytical solutions for conformable fractional PDEs arising in mathematical physics by exp-function method. Open Phys. 15(1), 647–651 (2017)
Javeed, S., Baleanu, D., Nawaz, S., Rezazadeh, H.: Soliton solutions of nonlinear Boussinesq models using the exponential function technique. Phys. Scr. 96(10), 105209 (2021)
Seadawy, A.R.: Approximation solutions of derivative nonlinear Schrodinger equation with computational applications by variational method. Europ. Phys. J. Plus. 130, 182: 1–10 (2015)
Taşcan, F., Bekir, A.: Analytic solutions of the (2+ 1)-dimensional nonlinear evolution equations using the sine-cosine method. Appl. Math. Comput. 215(8), 3134–3139 (2009)
Yao, S.W., Behera, S., Inc, M., Rezazadeh, H., Virdi, J.P.S., Mahmoud, W., Osman, M.S.: Analytical solutions of conformable Drinfel’d-Sokolov-Wilson and Boiti Leon Pempinelli equations via sine-cosine method. Results Phys. 42, 105990 (2022)
Kumar, S., Niwas, M., Wazwaz, A.M.: Lie symmetry analysis, exact analytical solutions and dynamics of solitons for (2+ 1)-dimensional NNV equations. Physica Scripta 95(9), 095204 (2020)
Sakkaravarthi, K., Johnpillai, A.G., Devi, A.D., Kanna, T., Lakshmanan, M.: Lie symmetry analysis and group invariant solutions of the nonlinear Helmholtz equation. Appl. Math. Comput. 331, 457–472 (2018)
Baskonus, H.M., Bulut, H., Sulaiman, T.A.: New complex hyperbolic structures to the lonngren-wave equation by using sine-gordon expansion method. Appl. Math. Nonlinear Sci. 4(1), 129–138 (2019)
Kundu, P.R., Fahim, M.R.A., Islam, M.E., Akbar, M.A.: The sine-Gordon expansion method for higher-dimensional NLEEs and parametric analysis. Heliyon 7(3) (2021)
Malfliet, W.: The tanh method: a tool for solving certain classes of nonlinear evolution and wave equations. J. Comput. Appl. Math. 164, 529–541 (2004)
Hereman, W., Malfliet, W.: The tanh method: a tool to solve nonlinear partial differential equations with symbolic software. In: Proceedings 9th world multi-conference on systemics, cybernetics and informatics, Orlando, pp. 165-168 (2005)
Kumar, D., Seadawy, A.R., Joardar, A.K.: Modified Kudryashov method via new exact solutions for some conformable fractional differential equations arising in mathematical biology. Chin. J. Phys. 56(1), 75–85 (2018)
Ray, S.S.: New analytical exact solutions of time fractional KdV-KZK equation by Kudryashov methods. Chin. Phys. B 25(4), 040204 (2016)
Seadawy, A.R., Ali, S.T.R.R.I., Younis, M., Ali, K. Makhlouf, M.M., Althobaiti, A.: Conservation laws, optical molecules, modulation instability and Painlevé analysis for the Chen–Lee–Liu model. Opt. Quantum Electron. 53, 172 (2021)
Rehman, H.U., Awan, A.U., Tag-ElDin, E.M., Alhazmi, S.E., Yassen, M.F., Haider, R.: Extended hyperbolic function method for the (2+ 1)-dimensional nonlinear soliton equation. Results Phys. 40, 105802 (2022)
Shang, Y.: The extended hyperbolic function method and exact solutions of the long-short wave resonance equations. Chaos, Solitons Fractals 36(3), 762–771 (2008)
Zhang, R.F., Bilige, S.: Bilinear neural network method to obtain the exact analytical solutions of nonlinear partial differential equations and its application to p-gBKP equation. Nonlinear Dyn. 95, 3041–3048 (2019)
Jhangeer, A., Rezazadeh, H., Seadawy, A.: A study of travelling, periodic, quasiperiodic and chaotic structures of perturbed Fokas–Lenells model. Pramana 95 Article number: 41 (2021)
Rehman, H.U., Akber, R., Wazwaz, A.M., Alshehri, H.M., Osman, M.S.: Analysis of Brownian motion in stochastic Schrödinger wave equation using Sardar sub-equation method. Optik 289, 171305 (2023)
Vitanov, N.K.: Application of simplest equations of Bernoulli and Riccati kind for obtaining exact traveling-wave solutions for a class of PDEs with polynomial nonlinearity. Commun. Nonlinear Sci. Numer. Simul. 15(8), 2050–2060 (2010)
Vitanov, N.K.: On modified method of simplest equation for obtaining exact and approximate solutions of nonlinear PDEs: the role of the simplest equation. Commun. Nonlinear Sci. Numer. Simul. 16(11), 4215–4231 (2011)
Zhao, Z., He, L., Wazwaz, A.M.: Dynamics of lump chains for the BKP equation describing propagation of nonlinear waves. Chin. Phys. B 32(4), 040501 (2023)
Zhao, Z., He, L.: Space-curved resonant solitons and inelastic interaction solutions of a (2+ 1)-dimensional generalized KdV equation. Nonlinear Dyn. 112(5), 3823–3833 (2024)
AlQahtani, S.A., Alngar, M.E., Shohib, R., Alawwad, A.M.: Enhancing the performance and efficiency of optical communications through soliton solutions in birefringent fibers. J. Opt., 1–11 (2024)
Wang, Y., Li, C., Chen, F., Lan, H., Fu, S., Klimczak, M., Zhao, L.: A prince for the sleeping beauty-NFT for soliton signal processing. Opt. Commun., 129857 (2023)
Madhukalya, B., Das, R., Hosseini, K., Baleanu, D., Salahshour, S.: Ion-acoustic solitons in magnetized plasma under weak relativistic effects on the electrons. Int. J. Appl. Comput. Math. 9(5), 102 (2023)
Zhu, J., Huang, G.: Quantum squeezing of matter-wave solitons in Bose-Einstein condensates. Chin. Phys. Lett. 40(10), 100504 (2023)
Dikandé, A.M.: Using dark solitons from a Bose-Einstein condensate necklace to imprint soliton states in the spectral memory of a free boson gas. New J. Phys. 25(10), 103017 (2023)
Dai, C.Q., Wang, Y.Y.: Coupled spatial periodic waves and solitons in the photovoltaic photorefractive crystals. Nonlinear Dyn. 102, 1733–1741 (2020)
Bo, W.B., Wang, R.R., Fang, Y., Wang, Y.Y., Dai, C.Q.: Prediction and dynamical evolution of multipole soliton families in fractional Schrödinger equation with the PT-symmetric potential and saturable nonlinearity. Nonlinear Dyn. 111(2), 1577–1588 (2023)
Geng, K.L., Mou, D.S., Dai, C.Q.: Nondegenerate solitons of 2-coupled mixed derivative nonlinear Schrödinger equations. Nonlinear Dyn. 111(1), 603–617 (2023)
Ren, B., Lin, J., Lou, Z.M.: A new nonlinear equation with lump-soliton, lump-periodic, and lump-periodic-soliton solutions. Complexity (2019)
Zerarka, A., Ouamane, S., Attaf, A.: On the functional variable method for finding exact solutions to a class of wave equations. Appl. Math. Comput. 217(7), 2897–2904 (2010)
Zerarka, A., Ouamane, S.: Application of the functional variable method to a class of nonlinear wave equations. World J. Model. Simul. 6(2), 150–160 (2010)
Seadawy, A.R., Alsaedi, B.A.: Soliton solutions of nonlinear Schrödinger dynamical equation with exotic law nonlinearity by variational principle method. Opt. Quantum Electron. 56, 700 (2024)
Nazarzadeh, A., Eslami, M., Mirzazadeh, M.: Exact solutions of some nonlinear partial differential equations using functional variable method. Pramana 81, 225–236 (2013)
Aminikhah, H., Refahi Sheikhani, A., Rezazadeh, H.: Functional variable method for solving the generalized reaction Duffing model and the perturbed Boussinesq equation. Adv. Model. Optim 17, 55–65 (2015)
Tian, B., Gao, Y.T.: Observable solitonic features of the generalized reaction Duffing Model. Zeitschrift für Naturforschung A 57(1–2), 39–44 (2002)
Acknowledgements
The authors extend their appreciation to Taif University, Saudi Arabia, for supporting this work through project number (TU-DSPP-2024-87).
Funding
No funding agency is available.
Author information
Authors and Affiliations
Contributions
All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
There is no conflict of interest.
Competing interests
The authors declare no competing interests.
Ethical Approval
We hereby declare that this manuscript is the result of our independent creation. This manuscript does not contain any research achievements that have been published or written by other individuals or groups.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Baloch, S.A., Abbas, M., Abdullah, F.A. et al. Multiple Soliton Solutions of Generalized Reaction Duffing Model Arising in Various Mechanical Systems. Int J Theor Phys 63, 234 (2024). https://doi.org/10.1007/s10773-024-05768-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10773-024-05768-8