
Abstract
As the computation power of modern high performance architectures increases, their heterogeneity and complexity also become more important. One of the big challenges of exascale is to reach programming models that give access to high performance computing (HPC) to many scientists and not only to a few HPC specialists. One relevant solution to ease parallel programming for scientists is domain specific language (DSL). However, one problem to avoid with DSLs is to mutualize existing codes and libraries instead of implementing each solution from scratch. For example, this phenomenon occurs for stencil-based numerical simulations, for which a large number of languages has been proposed without code reuse between them. The Multi-Stencil Framework (MSF) presented in this paper combines a new DSL to component-based programming models to enhance code reuse and separation of concerns in the specific case of stencils. MSF can easily choose one parallelization technique or another, one optimization or another, as well as one back-end implementation or another. It is shown that MSF can reach same performances than a non component-based MPI implementation over 16,384 cores. Finally, the performance model of the framework for hybrid parallelization is validated by evaluations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
As the computation power of modern high performance architectures increases, their heterogeneity and complexity also become more important. For example, the current fastest supercomputer Sunway TaihuLightFootnote 1 is composed of multi-cores processors and accelerators, and is able to reach a theoretical peak performance of about thirty peta-flops (floating-point operations per second). However, to be able to use such machines, multiple programming models, such as Message Passing Interface (MPI), OpenMP, CUDA, etc., and multiple optimization techniques, such as cache optimization, have to be combined. Moreover, current architectures evolution seems to indicate that heterogeneity and complexity in HPC will continue to grow in the future.
One of the big challenges to be able to use those upcoming Exascale computers is to propose programming models that give access to high performance computing (HPC) to many scientists and not only to a few HPC specialists [15]. Actually, applications that run on supercomputers and need such computation power (e.g., physics, weather or genomic) are typically not implemented by HPC specialists but by domain scientists.
Many general purpose languages and frameworks have improved the simplicity of writing parallel codes. For example PGAS models [23] or task-based frameworks, such as OpenMP [13], Legion [4] or StarPU [2], partially hide intricate details of parallelism to the user. For non-expert users however, these languages and frameworks are still difficult to use. Moreover, tuning an application for a given architecture is still very complex to achieve with these solutions. An interesting approach that combines simplicity of use, due to a high abstraction level, with efficient execution are domain specific languages (DSL) and domain specific frameworks (DSF). These solutions are specific to a given domain and propose a grammar or an API which is easy to understand for specialists of this domain. Moreover, knowledge about the targeted domain can be embedded in the compiler that can thus automatically apply parallelization and optimization techniques to produce high performance code. Domain specific solutions are therefore able to separate end-user concerns from HPC concerns which is a requirement to make HPC accessible to a wider audience.
Many domain specific languages and frameworks have been proposed. Each one claims to handle a distinct specific optimization or use case. Each solution is however typically re-implemented from scratch. In this paper, we claim that the sharing of common building blocks when designing DSLs or DSFs would increases re-use, flexibility and maintainability in their implementation. It would also ease the creation of approaches and applications combining multiple DSLs and DSFs.
For example, some of the approaches to numerically solve partial differential equations (PDEs) lead to stencil computations where the values associated to one point in space at a given time are computed from the values at the previous time at the exact same location together with a few neighbor locations. Many DSLs have been proposed for stencil computations [7, 8, 14, 26, 30] as detailed in Sect. 7. Many of them use the same kind of parallelization, data structures or optimization techniques, however each one has been built from scratch.
We propose the Multi-Stencil Framework (MSF) that is built upon a meta-formalism of multi-stencil simulations. MSF produces a parallel orchestration of a multi-stencil program without being aware of the underlying implementation choices (e.g., distributed data structures, task scheduler etc.). Thanks to this meta-formalism MSF is able to easily switch from one parallelization technique to another and from one optimization to another. Moreover, as MSF is independent from implementation details, MSF can easily choose one back-end or another, thus easing code reuse of existing solutions. To ease composition of existing solutions, MSF is based on component-based programming [29], where applications are defined as an assembly of building blocks, or components.
After a short overview of the Multi-Stencil Framework given in Sect. 2, the paper is organized as follows. The meta-formalism of a multi-stencil program is presented in Sect. 3; from this formalism are built both a light and descriptive domain specific language, namely MSL, as well as a generic component assembly of the application both described in Sect. 4; the compiler of the framework is described in Sect. 5; finally a performance evaluation is detailed in Sect. 6.
2 The Component-Based Multi-Stencil Framework
This section first presents a background on component models and particularly on the Low Level Components. This background is needed to understand the second part of the section which gives an overview of the overall Multi-Stencil Framework (MSF).
2.1 Background on Component Models
Component-based software engineering (CBSE) is a domain of software engineering [29] which aims at improving code re-use, separations of concerns, and thus maintainability. A component-based application is made of a set of component instances linked together, this is also called a component assembly. A component is a black box that implements an independent functionality of the application, and which interacts with its environment only through well defined interfaces: its ports. For example, a port can specify services provided or required by the component. With respect to high performance computing, some works have also shown that component models can achieve the needed level of performance and scalability while also helping in application portability [1, 6, 27].
Many component models exist, each of them with its own specificities. Well known component models include, for example, the CORBA Component Model (CCM) [24], and the Grid Component Model (GCM) [3] for distributed computing, while the Common Component Architecture (CCA) [1], and Low Level Components (L2C) [5] are HPC-oriented. This work makes use of L2C for the experiments.
L2C [5] is a minimalist C++ based HPC-oriented component model where a component extends the concept of class. The services offered by the components are specified trough provide ports, those used either by use ports for a single service instance, or use-multiple ports for multiple services instances. Services are specified as C++ interfaces. L2C also offers MPI ports that enable components to share MPI communicators. Finally, components can also have attribute ports to be configured. In this paper, and as illustrated in Fig. 1, a provide port is represented by a white circle, a use port by a black circle, a use-multiple port by a black circle with a white m in it. MPI port are connected with a black rectangle. A L2C-based application is a static assembly of components instances and the connections between their ports. Such an assembly is described in LAD, an XML dialect, and is managed by the L2C runtime system that minimize overheads by loading simple dynamic libraries. One can also notice that L2C can achieve performance if the granularity of components is high enough and attentively chosen by the user. The typical overhead of a L2C is a C++ indirect virtual method invocation.

Example of components and their ports representation. a Component \(c_0\) has a provide port (p) and a use port (u); Component \(c_1\) has also a provide port (q) but also a use multiple port (v). b A use port is connected to a (compatible) provide port. c Component \(c_2\) and \(c_3\) shares an MPI communicator
2.2 Multi-Stencil Framework Overview
The Multi-Stencil Framework helps end-users to produce high performance parallel applications for the specific case of multi-stencils. The multi-stencil domain will be formally defined in the next section. A multi-stencil program numerically solves PDEs using computations that can use neighborhood values around an element, also called a stencil computation.
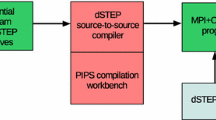
Figure 2 gives an overview of the Multi-Stencil Framework that is entirely detailed throughout this paper. It is composed of four distinct parts described hereafter. As illustrated in Fig. 2, MSF targets two different kinds of end-users: the numerician, in other words the mathematician, and the developer. Most of the time numericians do have programming knowledge, however as it is not their core domain and because of a lack of time, development is often left to engineers according to numerician needs. MSF has the interesting particularity to propose a clear separation of concerns between these two end-users by distinguishing the description of the simulation from the implementation of numerical codes.
MSF also has the interesting capability to be more flexible than existing solutions thanks to a possibility for a third party to interact with the framework. This third party is a High Performance Computing (HPC) specialist as displayed in Fig. 2.

The Multi-Stencil framework (MSF) is composed of the Multi-Stencil Language (MSL), the Generic Assembly (GA) and the Multi-Stencil Compiler (MSC) to produce a specialized assembly of components. The numerician, or mathematician uses MSL to describe its simulation. The developer will implement components responsible for numerical codes. A third party HPC specialist can interact with MSF to propose different version of HPC components (Color figure online)
Multi-Stencil Language The Multi-Stencil Language, or MSL, is the domain specific language proposed by the framework for the numerician. It is a descriptive language, easy to use, without any concern about implementation details. It fits the need of a mathematician to describe the simulation. The description written with MSL can be considered as an input of the framework. MSL is described in details in Sect. 4. The language is built upon the formalism described in Sect. 3.
Generic Assembly In addition to the language MSL, used by the numerician to describe its simulation, MSF needs a Generic Assembly (GA) of a multi-stencil program as input. What is called a GA is a component assembly for which meta-types of components are represented and for which some parts need to be generated or specialized. A GA could be compared respectively to a template or a skeleton in object programming languages (such as C++) or functional languages. From this generic assembly will be built the final specialized assembly of the simulation where component types will be specified, and where parts of GA will be transformed. As well as MSL, this generic assembly is described in Sect. 4 and is built upon the meta-formalism described in Sect. 3.
Multi-Stencil Compiler The core of the framework is the Multi-Stencil Compiler, or MSC. It is responsible for transforming the generic assembly into the final parallel assembly which is specific to the simulation described by the numerician with MSL. MSC is described in Sect. 5.
Specialized assembly Finally, the output of MSF is the component assembly generated by MSC. It is an instantiation and a transformation of the generic component assembly, by adding component types, transforming some part of the assembly, and by adding specific components generated by MSC. From this final component assembly which is specific to the simulation initially described with MSL, the developer will finally write components associated to numerical codes, or directly re-use existing components from other simulations. This final specialized component assembly is a parallel orchestration of the computations of the simulation initially described by the numerician. Finally, the specialized assembly produced by MSF is written in L2C.
3 Formalism of a Multi-stencil Program
The numerical solving of partial differential equations relies on the discretization of the continuous time and space domains. Computations are typically iteratively (time discretization) applied onto a mesh (space discretization). While the computations can have various forms, many direct methods can be expressed using three categories only: stencil computations involve access to neighbor values only (the concept of neighborhood depending on the space discretization used); local computations depend on the computed location only (this can be seen as a stencil of size one); finally, reductions enable to transform variables mapped on the mesh to a single scalar value.
This section gives a complete formal description of what we call a multi-stencil program and its computations. This formalism is general enough to be common to any existing solution already proposed for stencil computations. As a result it can be considered as a meta-formalism or a meta-model of a Multi-Stencil Program. This meta-formalism will be used to define MSL and GA in the next section.
3.1 Time, Mesh and Data
Let us introduce some notations. \(\varOmega \) is the continuous space domain of a numerical simulation (typically \(\mathbb {R}^n\)). A mesh \(\mathcal {M}\) defines the discretization of the continuous space domain \(\varOmega \) and is defined as follows.
Definition 1
A mesh is a connected undirected graph \(\mathcal {M}=(V,E)\), where \(V\subset \varOmega \) is the (finite) set of vertices and \(E\subseteq V^2\) the set of edges. The set of edges E of a mesh \(\mathcal {M}=(V,E)\) does not contain bridges. It is said that the mesh is applied onto \(\varOmega \).

From left to right, Cartesian, curvilinear and unstructured meshes
A mesh can be structured (as Cartesian or curvilinear meshes), unstructured, regular or irregular (without the same topology for each element) as illustrated in Fig. 3.
Definitions (mesh)
An entity\(\phi \) of a mesh \(\mathcal {M}=(V,E)\) is defined as a subset of its vertices and edges, \(\phi \subset V\cup E\).
A group of mesh entities\(\mathcal {G} \in \mathcal {P}(V\cup E)\) represents a set of entities of the same topology.
The set of all groups of mesh entities used in a simulation is denoted \(\varPhi \).
For example, in a 2D Cartesian mesh, an entity could be a cell, made up of four vertices and four edges. A group of entities could contain all the cells, another would for example contain the vertical edges at the frontier between cells. Both groups would be part of \(\varPhi \). This example is illustrated in Fig. 4a.
Definition 2
The finite sequence \(T: (t_n)_{n\in \llbracket 0, T_{max} \rrbracket }\) represents the discretization of the continuous time domain \(\mathcal {T}=\mathbb {R}\).
The time discretization can be as simple as a constant time-step with a fixed number of steps. The time-step and the number of steps can also change on the fly during execution.
Definitions (quantity)
\(\varDelta \) are the mesh variables. A mesh variable \(\delta \in \varDelta \) associates to each couple entity and time-step a value \(\delta : \mathcal {G}\times T\mapsto \mathcal {V}_\delta \) where \(\mathcal {V}_{\delta }\) is a value type.
The group of entities a variable is mapped on is denoted \(entity(\delta )=\mathcal {G}\).
\(\mathcal {S}\) are the scalar variables. A scalar variable \(s \in \mathcal {S}\) associates to each time-step a value \(s: T\mapsto \mathcal {V}_\delta \) where \(\mathcal {V}_{\delta }\) is a value type.
\(\mathbb {V}=\varDelta \cup \mathcal {S}\) is the set of variables or quantities.
Among the scalar variables is one specific boolean variable \(conv\in \mathcal {S}\), the convergence criteria, whose value is 0 except at the last step where it is 1. This scalar can be updated on the fly according to other variables, typically by using a reduction as detailed later.
3.2 Computations
Definitions
-
A computation domain D is a subpart of a group of mesh entities, \(D \subseteq \mathcal {G} \in \varPhi \).
-
The set of computation domains of a numerical simulation is denoted \(\mathcal {D}\).
-
\(\mathcal {N}\) is the set of neighborhood functions \(n: \mathcal {G}_i \mapsto \mathcal {G}_j^m\) which for a given entity \(\phi \in \mathcal {G}_i\) returns a set of m entities in \(\mathcal {G}_j\). One can notice that \(i = j\) is possible. Most of the time, such a neighborhood is called a stencil shape.
Definition 3
A computation kernel k of a numerical simulation is defined as \(k=(S,R,(w,D),comp)\), where
\(S \in \mathcal {S}\) is the set of scalar to read,
\(w \in \mathbb {V}\) is the single quantity (variable) modified by the computation kernel,
D is the computation domain on which w is computed, \(D \subseteq entity(w)\), or is null if \(w \in \varDelta \),
\(R \in \varDelta \times \mathcal {N}\) is the set of tuples (r, n) representing the data read where r is a mesh variable read by the kernel to compute w, and \(n : entity(w) \rightarrow entity(r)^m\) is a neighborhood function that indicates which entity of r are read to compute w.
Finally, comp is the numerical computation which returns a value from a set of n input values, \(comp: \mathcal {V}_i^n \rightarrow \mathcal {V}_j\), where \(\mathcal {V}_i\) and \(\mathcal {V}_j\) are value types. Thus, comp represents the actual numerical expression computed by a kernel.
In a Multi-Stencil simulation, at each time-step, a set of computations is performed. During a computation kernel, it can be considered that a set of old states (\(t-1\)) of quantities are read (\(\mathcal {S}\) and R), and that a new state (t) of a single quantity is written (w). Such a definition of a computation kernel covers a large panel of different computations. For example, the four usual types of computations (stencil, local, boundary and reduction) performed into a simulation can be defined as follow:
A computation kernel k(S, R, (w, D), comp) is a stencil kernel if \(\exists (r,n) \in R\) such that \(n \ne identity\).
A boundary kernel is a kernel k(S, R, (w, D), comp) where D is a specific computation domain at the border of entities, and which does not intersect with any other computation domain.
A computation kernel k(S, R, (w, D), comp) is a local kernel if \(\forall (r,n) \in R\), \(n = identity\).
A computation kernel k(S, R, (w, D), comp) is a reduction kernel if w is a scalar. A reduction can for example be used to compute the convergence criteria of the time loop of the simulation.
Since we only consider explicit numerical schemes in this paper, a kernel cannot write the same quantity it reads, except locally, i.e. if \(\exists (w,n)\) where \(w \in R\Rightarrow n=identity\).
It could seem counter-intuitive to restrict kernels to the computation of a single quantity. As a matter of fact, one often performs multiple computations in a single loop, for example for performance reasons (cache optimization, temporary computation factorization, etc.) or for readability (code length, semantically close computations, etc.). One can however notice that it is always possible to re-express a computation modifying n quantities as n computations modifying a single quantity each. Both approaches are therefore equivalent from an expressiveness point of view.
Modifying multiple quantities in a single loop nest does however not always improve performance. For example, it reduces the number of concurrent tasks available and limits the potential efficiency on parallel resources as will be shown in Sect. 6. We therefore introduce the concept of fusion in Sect. 5 where multiple logical kernels can be executed in a single loop nest that modifies multiple quantities. This transformation is much easier to implement than splitting a kernel would be, leaving more execution choices open.
In addition, the modification of multiple quantities in a single loop nest can lead to subtle ordering errors when executing in parallel as it will be discussed in Sect. 5.4. Automatically detecting kernels that can be fused instead of leaving this to the responsibility of the domain scientist avoids these potential errors. We have therefore chosen to restrict kernels to the computation of a single quantity.
Definition 4
The set of n ordered computation kernels of a numerical simulation is denoted \(\varGamma = [k_i]_{0 \le i \le n-1}\), such that \(\forall k_i,k_j \in \varGamma \), if \(i < j\), then \(k_i\) is computed before \(k_j\).
Definition 5
A multi-stencil program is defined by the octuplet

a Cartesian mesh and two kind of groups of mesh entities, b an example of stencil kernel on cells, c an example of stencil kernel on two different groups of mesh entities
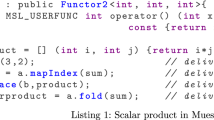
Example For example, in Fig. 4b, assuming that the computation domain (full lines) is denoted dc1 and the stencil shape described by the neighborhood function is n1, the stencil kernel can be defined as:
On the other hand, in the example of Fig. 4c, assuming the computation domain is dc2 and the stencil shape is n2, the stencil kernel is defined as:
In this section, we have formally defined a stencil program. This formalism is mainly composed of a mesh abstraction and a simple definition of computation. In fact, this formalism is generic enough to be common to many existing modelizations of a stencil computation or a stencil simulation. Thus, the formalism summarized by Eq. (1) can be compared to a meta-model of a multi-stencil program. In the next section, we use this meta-model (or meta-formalism) to define both a the domain specific language MSL, and the generic assembly of a multi-stencil program GA.
4 Generic Asssembly and the Multi-stencil Language
From the octuplet of Eq. (1) both the Generic Assembly (GA) of a multi-stencil program and the Multi-Stencil Language (MSL) can be built. GA and MSL are both are described in this section.
4.1 Generic Assembly
As illustrated in Fig. 5, the GA has five components: Driver, Time, DDS, Data, and Computations. These components are generic components or abstract components. It means that interfaces of these components are well defined but that they are not implemented yet in GA. They can be compared to abstract classes and templates in C++ for which an implementation must be given as well as specific parameters .

Generic Assembly according to the Multi-Stencil program formalism. Components circled by a double line identify those that will be instantiated multiple times by MSC. Component colors represent actors of Fig. 2 responsible for the component implementation: green for those automatically generated by the compiler, red for those implemented by HPC specialists and blue for those implemented by the developer (Color figure online)
Driver This component can be compared to the main function of a usual program. It is responsible for both the initialization and the execution of other components (like variable initialization and function calls). This component is generated by MSC (represented in green).
Time This component is responsible for the time T defined in Eq. (1). It is composed of a time loop and potentially of a convergence reduction. This component is generated by MSC (represented in green).
DDS This component is responsible for the mesh and its entities \(\mathcal {M}\) and \(\varPhi \), the set of computation domains \(\mathcal {D}\), and the set of neighborhood functions \(\mathcal {N}\). When the generic assembly is instantiated and specialized by MSC, an implementation of DDS is selected to handle a specific type of mesh. The interfaces exposed by this component are well defined and any component providing these interfaces can be indifferently used. A third party specialist can therefore propose new implementation of DDS. In this paper, both data and task parallelism are used. In the case of data parallelism DDS handles mesh partitioning and provides a synchronization interface as detailed in Sect. 5. The implementation of this component is the responsibility of HPC specialists (represented in red).
Data This component is responsible for the set of mesh variables \(\varDelta \). Each instance of the component uses the DDS component to handle one single mesh variable. It is closely related to DDS and its implementation is typically provided by the same HPC specialist as DDS (represented in red).
Computations This component is responsible for \(\varGamma \), i.e., the computations of the simulation. It is automatically replaced by a sub-assembly of components produced by MSC for which the parallel part is automatically generated. On the other hand, components responsible for the numerical kernels are filled by the developer. This is why this component is represented in green and blue in Fig. 5. The sub-assembly generation is described in Sect. 5.
4.2 The Multi-stencil Language
The second element of MSF which is built upon the meta-model represented by Eq. (1) is the Multi-Stencil Language and its grammar. This grammar is light and descriptive only. However it is sufficient (in addition to GA) for MSC to automatically extract a parallel pattern of the simulation, which is finally dumped as a specialized instantiation of GA.

Grammar of the Multi-Stencil Language
The grammar of the Multi-Stencil Language is given in Fig. 6 and an example is provided in Fig. 7. A Multi-Stencil program is composed of eight parts that match those of Eq. (1).

Example of program using the Multi-Stencil Language
- 1.
The mesh keyword (Fig. 6, l.1) introduces an identifier for \(\mathcal {M}\), the single mesh of the simulation. For example cart in Fig. 7, l.1. The language, based on the meta-model is independent of the mesh topology, thus this identifier is actually not used by the compiler.
- 2.
The mesh entities keyword (Fig. 6, l.2) introduces identifiers for the groups of mesh entities \(\mathcal {G}\in \varPhi \). For example cell or edgex in Fig. 7, l.2.
- 3.
The computation domains keyword (Fig. 6, l.3) introduces identifiers for the computation domains \(D\in \mathcal {D}\). For example d1 and d2 in Fig. 7, l.4-5. For reference, each domain is associated to a group of entities (Fig. 6, l.12) such as cell for d1 in Fig. 7, l.4.
- 4.
The independent keyword (Fig. 6, l.4) offers a way to declare that computation domains do not intersect, such as d1 and d2 in Fig. 7, l.7. This is used by the compiler to compute dependencies between computations.
- 5.
The stencil shapes keyword (Fig. 6, l.5) introduces identifiers for each stencil shape \(n\in \mathcal {N}\). For each n, the source and destination group of entities (Fig. 6, l.16) are specified. For example nec in Fig. 7, l.11 is a neighborhood from edgex to cell.
- 6.
The mesh quantities keyword (Fig. 6, l.6) introduces identifiers for \(\delta \in \varDelta \), the mesh variables with the group of entities they are mapped on (Fig. 6, l.16). For example the quantities C and H are mapped onto the groups of mesh entities edgex.
- 7.
The scalars keyword (Fig. 6, l.7) introduces identifiers for \(s\in \mathcal {S}\), the scalars. For example mu and tau in Fig. 7, l.15.
- 8.
Finally, the last part (Fig. 6, l.8) introduces the different computation loops of the simulation. Each loop is made of two parts:
the time keyword (Fig. 6, l.22) introduces either a constant number of iterations or conv, the convergence criteria that is a scalar (Fig. 6, l.24). For example, 500 iterations are specified in Fig. 7, l.16,
the computations keyword (Fig. 6, l.23) introduces identifiers for each computation \(k=(S,R,(w,D),comp) \in \varGamma \). Each computation (Fig. 6, l.26) specifies:
the quantity w written and its domain D, for example in Fig. 7, l.22, kernel k4 computes the variable F on domain d1,
the read scalars S and mesh variables with their associated stencil shape (R). For example in Fig. 7, l.22, k4 reads C with the shape nce and D with the default identity shape; it does not read scalars.
One can notice that in the example of Fig. 7, there are no kernel associated to the scalars mu and tau (reduction). In this case, those scalars are in fact constants. One can also notice that the computation to execute for each kernel is not specified. Only an identifier is given to each kernel, for example \(k_4\). The numerical code is indeed not handled by MSL that generates a parallel orchestration of computations only. The numerical computation is specified after MSC compilation by the developer (Fig. 2).
5 The Multi-stencil Compiler
In a computation k(S, R, (w, D), comp), the comp part is provided by the developer after the MSC compilation phase. This part does therefore not have any impact on compilation concerns. Thus, to simplify notations in the rest of this paper, we use the shortcut notation k(S, R, (w, D)) instead of k(S, R, (w, D), comp).
5.1 Data Parallelism
In a data parallelization technique, the idea is to split data, or quantities, on which the program is computed into sub-domains, one for each execution resource. The same program is applied to each sub-domain simultaneously with some additional synchronizations to ensure coherence.
More formally, the data parallelization of a multi-stencil program of Eq. (1) consists in a partitioning of the mesh \(\mathcal {M}\) in p sub-meshes \(\mathcal {M}=\{\mathcal {M}_0,\dots ,\mathcal {M}_{p-1}\}\). This step can be performed by an external graph partitioner [11, 21, 25] and is handled by the DDS implementation of the third party HPC specialist.
As entities and quantities are mapped on the mesh, the set of groups of mesh entities and the set of quantities \(\varDelta \) are partitioned the same way as the mesh: \(\varPhi =\{\varPhi _0,\dots ,\varPhi _{p-1}\}\), \(\varDelta =\{\varDelta _0,\dots ,\varDelta _{p-1}\}\).
The second step of the parallelization is to identify in \(\varGamma \) the synchronizations required to update data. It leads to the construction of a new ordered list of computations \(\varGamma _{sync}\).
Definition 6
For n the number of computations in \(\varGamma \), and for i, j such that \(i<j<n\), a synchronization is needed between \(k_i\) and \(k_j\), denoted  , if \(\exists (r_j,n_j) \in R_j\) such that \(w_i=r_j\) and \(n_j\ne identity\) (\(k_j\) is a stencil computation). The quantity to synchronize is \(\{w_i\}\).
, if \(\exists (r_j,n_j) \in R_j\) such that \(w_i=r_j\) and \(n_j\ne identity\) (\(k_j\) is a stencil computation). The quantity to synchronize is \(\{w_i\}\).
A synchronization is needed for the quantity read by a stencil computation (not local), if this quantity has been written before. This synchronization is needed because a neighborhood function \(n \in \mathcal {N}\) of a stencil computation involves values computed on different resources.
However, as a multi-stencil program is an iterative program, computations that happen after \(k_j\) at the time iteration t have also been computed before \(k_j\) at the previous time iteration \(t-1\). For this reason another case of synchronization has to be defined.
Definition 7
For n the number of computations in \(\varGamma \) and \(j<n\), if \(\exists (r_j,n_j) \in R_j\) such that \(n_j\ne identity\) and such that for all \(i<j\),  , a synchronization is needed between \(k_l^{t-1}\) and \(k_j^t\), where \(j<l<n\), denoted
, a synchronization is needed between \(k_l^{t-1}\) and \(k_j^t\), where \(j<l<n\), denoted  , if \(w_l=r_j\). The quantity to synchronize is \(\{w_l\}\).
, if \(w_l=r_j\). The quantity to synchronize is \(\{w_l\}\).
Definition 8
A synchronization between two computations  is defined as a specific computation
is defined as a specific computation
where \(S=\emptyset \), \(R=\{(r,n)\}=\{(w_i,n_j \in \mathcal {N}\}\), \((w,D)=(w_i,\bigcup _{\phi \in D_j} n_j(\phi )))\). In other words, \(w_i\) has to be synchronized for the neighborhood \(n_j\) for all entities of \(D_j\).
Definition 9
If  , \(k_j\) is replaced by the list
, \(k_j\) is replaced by the list
where the synchronization operation has been added.
When data parallelism is applied, the other type of computation which is responsible for additional synchronizations is the reduction. Actually, the reduction is first applied locally on each subset of entities, on each resource. Thus, p (number of resources) scalar values are obtained. For this reason, to perform the final reduction, a set of synchronizations are needed to get the final reduced scalar. As most parallelism libraries (MPI, OpenMP) already propose a reduction synchronization with their own optimizations, we simply replace the reduction computation by itself annotated by red.
Definition 10
A reduction kernel \(k_j(S_j,R_j,(w_j,D_j))\), where w is a scalar, is replaced by \(k^{red}_j(S_j,R_j,(w_j,D_j))\).
Definition 11
The concatenation of two ordered lists of respectively n and m computations \(l_1=[k_i]_{0 \le i \le n-1}\) and \(l_2=[k'_i]_{0 \le i \le m-1}\) is denoted \(l_1 \cdot l_2\) and is equal to a new ordered list \(l_3=[k_0,\dots ,k_{n-1},k'_0,\dots ,k'_{m-1}]\).
Definition 12
From the ordered list of computation \(\varGamma \), a new synchronized ordered list \(\varGamma _{sync}\) is obtained from the call \(\varGamma _{sync} = F_{sync}(\varGamma ,0)\), where \(F_{sync}\) is the recursive function defined in Algorithm 1.
Algorithm 1 follows previous definitions to build a new ordered list which includes synchronizations. In this algorithm, lines 7 to 19 apply Definition (6), lines 20 to 29 apply Definition (7), and finally lines 34 and 35 apply Definition (10). Finally, line 37 of the algorithm is the recursive call.

The final step of this parallelization is to run \(\varGamma _{sync}\) on each resource. Thus, for each resource \(0 \le r \le p-1\) the multi-stencil program
is performed.
Example Figure 7 gives an example of a \(\mathcal {MSP}\) program. From this example, the following ordered list of computation kernels is extracted:
From this ordered list of computation kernels \(\varGamma \), and from the rest of the multi-stencil program, synchronizations can be automatically detected from the call to \(F_{sync}(\varGamma ,0)\) to get the synchronized ordered list of kernels:
where
5.2 Hybrid Parallelism
A task parallelization technique is a technique to transform a program as a dependency graph of different tasks. A dependency graph exhibits parallel tasks, or on the contrary sequential execution of tasks. Such a dependency graph can directly be given to a dynamic scheduler, or can statically be scheduled. In this paper, we consider a computation kernel as a task and we introduce task parallelism by building the dependency graph between kernels of the sequential list \(\varGamma _{sync}\). Thus, as \(\varGamma _{sync}\) already takes into account data parallelism, we introduce hybrid parallelism.
Definition 13
For two computations \(k_i\) and \(k_j\), with \(i < j\), it is said that \(k_j\) is dependent from \(k_i\) with a read after write dependency, denoted \(k_i \prec _{raw} k_j\), if \(\exists (r_j,n_j) \in R_j\) such that \(w_i=r_j\). In this case, \(k_i\) has to be computed before \(k_j\).
Definition 14
For two computations \(k_i\) and \(k_j\), with \(i < j\), it is said that \(k_j\) is dependent from \(k_i\) with a write after write dependency, denoted \(k_i \prec _{waw} k_j\), if \(w_i = w_j\) and \(D_i \cap D_j \ne \emptyset \). In this case, \(k_i\) also has to be computed before \(k_j\).
Definition 15
For two computations \(k_i\) and \(k_j\), with \(i < j\), it is said that \(k_j\) is dependent from \(k_i\) with a write after read dependency, denoted \(k_i \prec _{war} k_j\), if \(\exists (r_i,n_i) \in R_i\) such that \(w_j=r_i\). In this case, \(k_i\) also has to be computed before \(k_j\) is started so that values read by \(k_i\) are relevant.
These definitions are known as data hazards classification. However, a specific condition on the computation domain, due the multi-stencils specific case, is introduced for the write after write case. One can note that the independent keyword of Fig. 6 is useful in this case as the user explicitly indicates that \(D_i \cap D_j=\emptyset \).
Definition 16
A directed acyclic graph (DAG) G(V, A) is a graph where the edges are directed from a source to a destination vertex, and where, by following edges direction, no cycle can be found from a vertex u to itself. A directed edge is called an arc, and for two vertices \(v,u \in V\) an arc from u to v is denoted \((\overset{\frown }{u,v}) \in A\).
From the ordered list of computations \(\varGamma _{sync}\) and from the MSL description, a directed dependency graph \(\varGamma _{dep}(V,A)\) can be built finding all pairs of computations \(k_i\) and \(k_j\), with \(i<j\), such that \(k_i \prec _{raw} k_j\) or \(k_i \prec _{waw} k_j\) or \(k_i \prec _{war} k_j\).
Definition 17
For two directed graphs G(V, A) and \(G'(V',A')\), the union \((V,A)\cup (V',A')\) is defined as the union of each set \((V\cup V', A \cup A')\).
Definition 18
From the synchronized ordered list of computation kernels \(\varGamma _{sync}\), the dependency graph of the computations \(\varGamma _{dep}(V,A)\) is obtained from the call \(F_{dep}(\varGamma _{sync},0)\), where \(F_{dep}\) is the recursive function defined in Algorithm 2.

This constructive function is possible because the input is an ordered list. Actually, if \(k_i\prec k_j\) then \(i<j\). As a result, \(k_i\) is already in V when the arc \((\overset{\frown }{k_i,k_j})\) is built.
One can note that \(\varGamma _{dep}\) only takes into account a single time iteration. A complete dependency graph of the simulation could be built. This is a possible extension of this work.
Proposition 19
The directed graph \(\varGamma _{dep}\) is an acyclic graph.
As a result of the hybrid parallelization, each resource \(0 \le r \le p-1\) perform a multi-stencil program, defined by
The set of computations \(\varGamma _{dep}\) is a dependency graph between computation kernels \(k_i\) of \(\varGamma \) and synchronizations of kernels added into \(\varGamma _{sync}\). \(\varGamma _{dep}\) can be built from the call to
Example Figure 7 gives an example of \(\mathcal {MSP}\) program. From \(\varGamma _{sync}\) that has been built in Eq. (3), the dependency DAG can be built. For example, as \(k_4\) computes F and \(k_6\) reads F, \(k_4\) and \(k_6\) becomes vertices of \(\varGamma _{dep}\), and an arc \((\overset{\frown }{k_4,k_6})\) is added to \(\varGamma _{dep}\). The overall \(\varGamma _{dep}\) built from the call to \(F_{dep}(\varGamma _{sync},0)\) is drawn in Fig. 8. By building synchronizations as defined in Definitions (6), (7) and (8), dependencies are respected. For example, \(k_{0;1}^{sync}\) read and write B which guarantees that \(k_{0;1}^{sync}\) is performed after \(k_0\) and before \(k_1\).

\(\varGamma _{dep}\) of the example of program of Fig. 7
5.3 Static Scheduling
In this section we detail a static scheduling of \(\varGamma _{dep}\) by using minimal series-parallel directed acyclic graphs. Such a static scheduling may not be the most efficient one, but it offers a simple fork/join task model which makes possible the design of a performance model. Moreover, such a scheduling offers a simple way to propose a fusion optimization.
In 1982, Valdes & Al [31] have defined the class of Minimal Series-Parallel DAGs (MSPD). Such a graph can be decomposed as a serie-parallel tree, denoted TSP, where each leaf is a vertex of the MSPD it represents, and whose internal nodes are labeled S or P to indicate whether the two sub-trees form a sequence or parallel composition. Such a tree can be considered as a fork-join model and as a static scheduling. An example is given in Fig. 10.
Valdes & Al [31] have identified a forbidden shape, or sub-graph, called N, such that a DAG without this shape is MSPD.
Thus, as \(\varGamma _{dep}\) is a DAG, by removing N-Shapes it is transformed to a MSPD. The intuition is illustrated in Fig. 9. Considering the figure without the dashed line, the sub graph forms a “N” shape. The fact is that this shape cannot be represented as a composition of sequences or parallel executions. To remove such forbidden N-shapes of \(\varGamma _{dep}=(V,E)\), we have chosen to apply an over-constraint with the relation \(k_0 \prec k_3\), such that a complete bipartite graph is created for the sub-dag as illustrated in Fig. 9. By adding this arc to the DAG, it is possible to identify its execution as \(sequence(parallel(k_0;k_2);parallel(k_1;k3))\) represented by the TSP tree of Fig. 10.

Over-constraint on the forbidden N shape

TSP tree of Fig. 9
After these over-constraints are applied, \(\varGamma _{dep}\) is MSPD. Valdes & Al [31] have proposed a linear algorithm to know if a DAG is MSPD and, if it is, to decompose it to its associated binary decomposition tree. As a result, the binary tree decomposition algorithm of Valdes & Al can be applied on \(\varGamma _{dep}\) to get the TSP static scheduling of the multi-stencil program.
Example From \(\varGamma _{dep}\) illustrated in Fig. 8 the TSP tree represented in Fig. 11 can be computed.

Serie-Parallel tree decomposition of the example of program of Fig. 7
5.4 Fusion Optimization
Using MSL, it is possible to ask for data parallelization of the application, or for an hybrid parallelization. Even though the MSL language is not dedicated to produce very optimized independent stencil codes, but to produce the parallel orchestration of computations, building the TSP tree makes available an easy optimization when the data parallelization technique is the only one used. This optimization consists in proposing a valid merge of some computation kernels inside a single space loop. This is called a fusion. As previously explained in Sect. 3, MSL restrict the definition of a numerical computation by writing a single quantity at a time which avoids errors in manual fusion or counter-productive fusions for task parallelization. MSF guarantees that proposed fusions are correct and will not cause errors in the final results of the simulation.
Those fusions can be computed from the canonical form of the TSP tree decomposition. The canonical form consists in recursively merging successive S vertices or successive P vertices of TSP.

First fusion case
The fusion function \(F_{fus}\) is described in Algorithm 3, where the parent(k) function returns the parent vertex of k in the tree, and where \(k_{i;j}^{fus}\) represents the fusion of \(k_i\) and \(k_j\) keeping the sequential order i; j if i is computed before j in TSP. Finally, type(k) returns comp if the kernel is a computation kernel, and sync or red otherwise.

We are not arguing that such a simple fusion algorithm could be as good as complex cache optimization techniques which can be found in stencil DSLs [30] for example. However, this fusion takes place at a different level and can bring performance improvements as illustrated in Sect. 6. This fusion algorithm relies on the following observations.
First, two successive computation kernels \(k_i\) and \(k_j\) which are under the same parent vertex S in TSP are, by construction, data dependent. As a result, what is written by the first one is read by the second one. Thus, \(w_i\) the quantity written by \(k_i\) is common to these computations. Thus, if the computation domains verify \(D_i=D_j\), the fusion of \(k_i\) and \(k_j\) will decrease cache misses.
Second, two successive computation kernels \(k_i\) and \(k_j\) which are under the same parent vertex P in TSP are not, by construction, data dependent. However, if the computation domains verify \(D_i=D_j\), and if \(R_i \cap R_j \ne \emptyset \) cache misses could also be decreased by the fusion \(k_{i;j}^{fus}\). These two cases are illustrated by Figs. 12 and 13.

Second fusion case
Third, an additional fusion case is possible and more tricky to find. Similarly to the first observation, two successive computation kernels \(k_i\) and \(k_j\) which are under the same parent vertex S in TSP are data dependent and what is written by the first one is read by the second one. The construction of the tree also guarantees that synchronizations are not needed between these computations, otherwise a \(k^{sync}\) would have been inserted between them (inherited from \(\varGamma _{sync}\)). Thus, \(w_i\) the quantity written by \(k_i\) is common to these computations. Considering the following:
\(D_i \ne D_j\), which means that loop fusion is by default not possible,
\((r_j,n_j)\) is the pair read by \(k_j\) for which \(r_j=w_i\) and for which \(n_j:D_j \rightarrow D_i^m\)
the fusion of \(k_i\) and \(k_j\) is possible if and only if \(\exists n:D_i \rightarrow D_j \in \mathcal {N}\) such that
This means that even if domains are different, a loop fusion is possible if an adequate neighborhood function can be found. One can note that this particular fusion case is equivalent to a scatter optimization, often used when using unstructured meshes. One can also note that the computation \(k_j\) will be written in a different manner if a scatter fusion is performed or not. This particular case is illustrated in Fig. 14.

Third fusion case
The developer will be notified of fusions in the output of MSC. This is not a problem by using MSF as the fusion is proposed before the developer actually write the numerical code of \(k_j\).
5.5 Overall Compilation Process
MSC takes a MSL file written using the grammar described in Sect. 4, as well as the Generic Assembly presented in Fig. 5 as inputs, and generates a specialized component assembly that manages the parallel orchestration of the computations of the simulation. In this final assembly, that could be compared to a pattern or a skeleton of the simulation, the developer still has to fill-in the functions corresponding to the various computation kernels by using the DDS instantiation chosen into the specialized assembly. The overall behavior of the compiler is as follows:
- 1.
it parses the MSL input file and generates \(\varGamma \), the list of computation kernels,
- 2.
from \(\varGamma \), it builds \(\varGamma _{sync}\), the list including synchronizations for data parallelism using Algorithm \(F_{sync}\) introduced in Sect. 5,
- 3.
from \(\varGamma _{sync}\), it builds \(\varGamma _{dep}\), the DAG supporting hybrid parallelism using Algorithm \(F_{dep}\) introduced in Sect. 5,
- 4.
it then removes the N-Shapes from \(\varGamma _{dep}\) to get a MSPD graph, and generates its serie-parallel binary tree decomposition TSP,
- 5.
it performs the fusion of kernels in TSP if required (data parallelization only),
- 6.
it transforms GA to generate its output specialized component assembly.
The last step of this compilation process is detailed below. It is composed of four steps:
- 1.
it instantiates DDS and Data components by using components implemented by a third party HPC specialist,
- 2.
it generates the structure of K components responsible for each computation kernel of the simulation,
- 3.
it generates a new Scheduler component,
- 4.
it replaces the Computations component of GA by a generated sub-assembly that matches TSP by using Scheduler, K and Sync components.
New components have been introduced above and need to be explained. A K component is a component into which the developer will write numerical code. It could represents a single computation kernel described by the numerician using MSL, or it could represents the fusion of multiple computation kernels. In any case the name of the generated component will use kernel identifiers used in the MSL description. A K kernel is composed of m use ports that are used to be connected to the m quantities needed by the computation (i.e., the numerical code). The component also exposes a provide port to be connected to the Scheduler component. Interfaces of a K component are represented in Fig. 15a.
A Sync component is a static component (not generated) composed of a use-multiple port which is used to request synchronizations for all quantities it is linked to (Data). The component also exposes a provide port to be connected to the Scheduler component. The Sync component is represented in Fig. 15b.
Finally, the Scheduler component is the component responsible for implementing the TSP tree computed by MSC. Thus, this component represents the specific parallel orchestration of computations. It exposes as many use ports as there are instances of K components to call (i.e., computations and fusions of computations). The component also exposes a provide port to be connected to the Time component. Interfaces of a Scheduler component are represented in Fig. 15c.
To illustrate how a specialized assembly is generated, the specialized assembly of the example that has been used throughout this paper is represented in Fig. 16.

Specific components used to transform GA to the specialized component assembly of the simulation aK. bSync. cScheduler

Sub-part of the specialized assembly generated by MSC from the example of the example of Fig.7 used throughout the paper. For readability some connections are represented by numbers instead of lines. The entire assembly is generated by MSC, however some components are automatically generated by MSC (in green), some are written by HPC specialists (in red) and others by the developer (in blue) (Color figure online)
5.6 Performance Model
In this subsection we introduce two performance models, one for the data parallelization technique, and one for the hybrid data and task parallelization technique, both previously explained.
The performance model for the data parallelization technique is inspired by the Bulk Synchronous Parallel model. We consider that each process handles its own sub-domain that has been distributed in a perfectly balanced way. The performance model describes the computation time as the sum of the sequential time divided by the number of processes, and of the time spent in communications between processes. Thus, for
\(T_{SEQ}\) the sequential reference time,
P the total number of processes,
\(T_{COM}\) the communications time,
the total computation time is
Thus, when the number of processes P increase in data parallelization, the performance model limit is \(T_{COM}\)
As a result, the critical point for performance is when \(T_{COM} \ge \frac{T_{SEQ}}{P}\), which happens naturally in data parallelization as \(T_{COM}\) will increase with the number of processes, and \(\frac{T_{SEQ}}{P}\) decrease with the number of processes.
This limitation is always true, but can be delayed by different strategies. First, it is possible to overlap communications and computations. Second, it is possible to introduce another kind of parallelization, task parallelization. Thus, for the same total number of processes, only a part of them are used for data parallelization, and the rest are used for task parallelism. As a result, \(\frac{T_{SEQ}}{P}\) will continue to decrease but \(T_{COM}\) will increase later. This second strategy is the one studied in the following hybrid performance model.
For an hybrid (data and task) parallelization technique, and for
\(P_{data}\) the number of processes used for data parallelization,
\(P_{task}\) the number of processes used for task parallelization, such that \(P = P_{data} \times P_{task}\) is the total number of processes used,
\(T_{task}\) the overhead time due to task parallelization technique,
and \(F_{task}\) the task parallelization degree of the application,
the total computation time is
The time overhead due to task parallelization can be represented as the time spent to create a pool of threads and the time spent to synchronize those threads. Thus, for
\(T_{cr}\) the total time to create the pool of threads (may happened more than once),
\(T_{sync}\) the total time spent to synchronize threads,
the overhead is
The task parallelization degree of the application \(F_{task}\) is the limitation of a task parallelization technique. As explained before, a task parallelization technique is based on the dependency graph of the application. Thus, this dependency graph must expose enough parallelism for the number of available threads. For this performance model we consider that
however, as it will be illustrated in Sect. 6\(F_{task}\) is more difficult to establish. Actually, the lower and upper bounds of \(F_{task}\) are constrained by the dependency graph of the application.
As a result when \(P_{data}\) is small a data parallelization technique may be more efficient, while an hybrid parallelization could be interesting at some point to improve performance. The question is: when is it interesting to use hybrid parallelization ? This paper does not propose an intelligent system to answer this question automatically, however, it offers a way to understand how to answer the question. To answer this question let’s consider the two parallelization techniques, data only and hybrid. We denote
\(P_{data1}\) the total number of processes entirely used by the data only parallelization,
\(P_{data2}\) the number of processes used for data parallelization in the hybrid parallelization,
and \(P_{task}\) the number of processes used for task parallelization in the hybrid parallelization,
such that \(P_{data1} = P_{data2} \times P_{task}\).
We search the point where the data parallelization is less efficient than the hybrid parallelization. Thus,
This happens when
This performance model will be validated and will help explain results of Sect. 6.
6 Evaluation
This section first presents the implementation details chosen to evaluate MSF in this paper, and the studied use case. Then, the compilation time of MSC is evaluated before analyzing both available parallelization techniques, data and hybrid (data and task). Finally, the impact of kernels fusions is studied.
6.1 Implementation Details
The main choices to take when implementing a specialized assembly of GA concern the technologies used for data and task parallelizations, i.e., implementation choices of DDS and Scheduler components.
For the data-parallelization, as already detailed many times throughout the paper, a third party HPC specialist is responsible for implementing DDS and Data using a chosen library or external language and by following the specified interfaces of these two components. To evaluate MSF, we have played the role of HPC specialists and have implemented these components using SkelGIS, a C++ embedded DSL [10] that proposes a distributed Cartesian mesh as well as user API to manipulate structures while hiding their underlying distribution.
For task parallelism, we have chosen to use OpenMP [13] to generate the code of the Scheduler component. OpenMP targets shared-memory platforms only. Although the version 4 of OpenMP has introduced explicit support for dynamic task scheduling, our implementation only requires version 3 whose fork-join model is well suited for the static scheduling introduced in Sect. 5. The use of dynamic schedulers, such as provided by libgomp,Footnote 2 StarPU [2], or XKaapi [17], to directly execute the DAG \(\varGamma _{dep}\) is left to future work.
As a result, MSC generates a hybrid code which uses both SkelGIS and OpenMP. It also generates the structure of K components where the developer must provide local sequential implementations of the kernels using SkelGIS API.
6.2 Use Case Description
All evaluations presented in this section are based on a real case study of the shallow-Water Equations as solved in the FullSWOF2DFootnote 3 [10, 16] code from the MAPMO laboratory, University of Orléans. In 2013, a full SkelGIS implementation of this use case has been performed by numericians and developers of the MAPMO laboratory [9, 10, 12]. From this implementation we have kept the code of computation kernels to directly use it into K components. Compared to a full SkelGIS implementation, where synchronizations and fusions are handled manually, MSF automatically compute where synchronizations are needed and how to perform a fusion without errors. To evaluate MSF on this use case we have described the FullSWOF2D simulation by using MSL. FullSWOF2D contains 3 mesh entities, 7 computation domains, 48 data and 98 computations (32 stencil kernels and 66 local kernels). Performances of the obtained implementation are compared to the plain SkelGIS implementation to show that no overheads are introduced by MSF by using L2C.
6.3 Multi-stencil Compiler Evaluation
Table 1 illustrates the execution time of each step of MSC for the FullSWOF2D example. This has been computed on a laptop with a dual-core Intel Core i5 1.4 GHz, and 8 GB of DDR3. MSC has been implemented in Python 2. While the overall time of 4.6 s remains reasonable for a real case study, one can notice that the computation of the TSP tree is by far the longest step. As a matter of fact, the complexity of the algorithm for N-shapes removal is \(O(n^3)\). If this complexity is not a problem at the moment and onto this use case it could become one for just-in-time compilation or more complex simulations. The replacement of the static scheduling by a dynamic scheduling using dedicated tools (such as OpenMP 4, StarPU etc.) should solve this in the future.
6.4 Data Parallelism Evaluation
In this part, we disable task-parallelism to focus on data-parallelism. Two versions of the code are compared in this section: first a plain SkelGIS implementation of FullSWOF2D, where synchronizations and fusions are handled manually; second, a MSF over SkelGIS version where synchronizations and fusions are automatically handled. SkelGIS has already been evaluated in comparison with a native MPI implementation for the FullSWOF2D example [10]. For this reason, this section uses the plain SkelGIS implementation as the reference version. This enables to evaluate both the choices made by MSC as well as the potential overheads of using L2C [5] that is not used in the plain SkelGIS version. The evaluations have been performed on the Curie supercomputer (TGCC, France) described in Table 2. Each evaluation has been performed nine times and the median is presented in results.
Weak scaling Figures 17, 18 and 19 respectively show weak scaling experiments that we have conducted. Four computation domains are evaluated: \(400 \times 400\) cells by core, \(600 \times 600\) cells by core and \(800 \times 800\) cells by core, from 16 to 16,384 cores, as summarized in Table 3.

weak-scaling with \(400 \times 400\) domain per core and 200 time iterations

weak-scaling with \(600 \times 600\) domain per core and 200 time iterations

weak-scaling with \(800 \times 800\) domain per core and 200 time iterations
From these results, one can notice, first, that performances of MSF are very close to the reference version using plain SkelGIS. This is a very good result which shows first that MSC performs good synchronizations and fusions, and second that overheads introduced by L2C are limited thanks to a good component granularity in the Generic Assembly.
However, it seems that a slightly drop of performance happens when the domain size per core increases. This performance decrease is really small though, with a maximum difference between the two versions of 2.83% in Fig. 19.
The only noticeable difference between the two versions are due to L2C which load dynamic libraries at runtime. Because of this particularity, components of L2C are compiled with the -fpic compilation flagFootnote 4 while the SkelGIS version does not. This flag can have slight positive or negative effects on code performance depending on the situation and might be responsible for the observed difference.
Strong scaling Figure 20 shows the number of iteration per second for a 10k\(\times \)10k global domain size from 16 to 16,384 cores. The total number of time iterations for this benchmark is 1000. In addition to the reference SkelGIS version, the ideal strong scaling is also plotted in the figure.

Strong scaling on a \(10k \times 10k\) domain and 1000 time iterations
First, one can notice that the strong scaling evaluated for the MSF version is close to the ideal speedup up to 16,384 cores, which is a very good result. Moreover, no overheads are introduced by MSF which shows that automatic synchronizations and automatic fusions enable the same level of performance than the one manually written into the plain SkelGIS version. Finally, no overheads are introduced by components of L2C. A small behavior difference can be noticed with \(2^9=512\) cores, however this variation is no longer observed with 1024 cores.
6.5 Hybrid Parallelism Evaluation
In this section, we add task parallelism to evaluate the hybrid parallelization offered by MSF. The MSF implementation evaluated in this paper relies on SkelGIS and OpenMP.
The series-parallel tree decomposition TSP of this simulation, extracted by MSC, is composed of 17 nodes labeled as sequence \(\mathcal {S}\) and 18 nodes labeled as parallel \(\mathcal {P}\).
We define the level of parallelism as the number of parallel tasks inside one fork of the fork/join model. The fork/join model obtained for FullSWOF2D is composed of 18 fork phases (corresponding to \(\mathcal {P}\) nodes of TSP). Table 4 represents the number of time (denoted frequency) a given level of parallelism is obtained inside fork phases.
One can notice that the level of task parallelism extracted from the Shallow water equations is limited by two sequential parts in the application (level 1). Moreover, a level of 16 parallel tasks is reached two times, and five times for the fourth level. This means that if two cores are dedicated to task parallelism, the two sequential parts of the code will not take advantage of these two cores, and that no part of the code would benefit from more than 16 cores. The task parallelism, as proposed in this paper (i.e., where each kernel is a task) is therefore insufficient to take advantage of a single node of modern clusters that typically supports more than 16 cores.

Computation versus communication times for a single time iteration using the data parallelization technique

Strong scaling comparisons between data parallelization and hybrid parallelization. A close OpenMP clause is used to bind threads onto cores
On the other hand, Fig. 21 illustrates limitations of data parallelization technique alone. This figure displays the execution time (with a logarithmic scale) of FullSWOF2D while increasing the number of cores for a fix domain size of \(500 \times 500\) with a total of 200 time iterations (i.e., this is a strong scaling). One can note that times are really small. Actually the time represented in Fig. 21 is the time spent into a single time iteration. The speedup of this same benchmark is represented in blue in Fig. 22. One can note that the scaling is not as good as the one presented in Fig. 20. The main difference between these two benchmarks is the domain size. In the benchmark of Fig. 20 the domain size is \(10k \times 10k\) which means that using \(2^8 = 256\) cores, for example, each core has to compute only a \(625 \times 625\) sub-domain. On the other hand, using \(2^8\) cores in Fig. 22 each core has to compute a \(31 \times 31\) sub-domain. Figure 21 shows why the speedup is not as good as the one with a bigger domain size.
Actually, in this figure, while the computation time (in blue) decreases linearly with the number of core used, the communication behavior (in red) is much more erratic. Between 2 and 16 cores, communications are performed inside a single node thus the time is small and nearly constant. There is a small oscillation that might be explained by the partitioning differences. SkelGIS performs a two dimensional partitioning strategy. For this reason a smaller number of bytes are communicated using 2 cores than using 4, and using 8 cores than using 16 cores. Starting from 32 cores, each node is fully used and more than one node is used. From this point thus the communication time is typically modeled as \(L+S/B\) where L is the latency, S the data size and B the bandwidth. This explains the decrease of communication time from 32 to 128 cores where the data sizes communicated by each process decreases. The increases observed after 128 cores might be due to the fact that with the increased number of processes the fat-tree becomes deeper and the latencies increase.
All in all, when the number of core increases, the computation/communication ratio becomes poorer and poorer. As a result, the data parallelism alone fails to provide enough parallelism to leverage the whole machine and other sources of parallelism have to be found. As expected, in Fig. 22 the speedup bends down from 256 to 2048 cores. The same problem would happened in previous experiment of Fig. 20, however as the domain size is larger, the phenomena appears with more cores.
As task parallelism fails to scale from 16 cores, and as data parallelism also fails to scale when the communication cost overpass the execution time, an hybrid parallelization strategy is proposed by MSF and is evaluated below.
In addition to the blue curve, Fig. 22 shows speedups for the same example (\(500 \times 500\) domain with 200 iterations) but using an hybrid parallelization. Figure 22 shows a comparison with 2, 4, 8 and 16 cores per MPI process for task parallelization.
For example, the purple curve shows the parallelization which uses for each data parallelization process (i.e., MPI process) 8 additional cores for task parallelization. As a result, for example, when using 2 machines of the TGCC cluster, with a total of 32 cores, 4 cores are used for SkelGIS MPI processes, for data parallelization, and for each one 8 cores are used for task parallelization (\(4 \times 8 = 32\)). This respects \(P = P_{data} \times P_{task}\) as presented in Sect. 5.6. As a result, and as explained in Sect. 5.6, quantities that are responsible for communications are less divided into sub-domains. Therefore, the effect observed with the blue curve is delayed to a higher number of cores.
From 2 to 8 cores, the improvement of the strong scaling is clear. However, reaching 16 cores, an important initial overhead appears and in addition to this, the curve bends down rapidly instead of improving the one with 8 cores for task parallelization. Two different phenomena happen in this case.
First, thin nodes of the TGCC Curie are built with two NUMA socket each of 8 cores. As a result, when increasing the number of OpenMP cores for task parallelization from 8 to 16 cores, an overhead is introduced by exchanges of data between memories of the two NUMA sockets. This phenomena is illustrated in Fig. 23. In this figure, a different binding strategy is used. A binding strategy is the way the scheduler binds threads onto available cores. The strategy used in Fig. 23 is called spread (instead of close in Fig. 22). This strategy binds threads on cores in order to spread as much as possible onto resources, which means that the two NUMA sockets are used whatever the number of cores used for tasks is. As a result, and as shown in the figure, using 2, 4 and 8 cores an initial overhead is introduced as the one observed in Fig. 22. This shows that the initial overhead with 16 cores is due to NUMA effects.

Strong scaling comparisons between data parallelization and hybrid parallelization. A spread OpenMP clause is used to bind threads onto cores
The second phenomena that happens in Fig. 22 using 16 cores is due to the level of parallelism introduced by the task parallelization technique. Actually, as illustrated in Table 4, only two forks of TSP can take advantage of 16 cores among a total of 18 forks. This phenomena has been mentioned in Sect. 5.6 by the variable \(F_{task}\) and the fact that it is not always true that \(F_{task}=P_{task}\). This explains why using 16 cores is less efficient than using 8 cores, even when the two NUMA sockets are always used as in Fig. 23.
Finally, to validate the performance model introduced in Sect. 5.6, and to understand when the hybrid parallelization becomes more interesting than the data parallelization, Fig. 24 represents \(T_{COM1}\) and \(T_{COM2}+T_{task}\) of Eq. (8), for the best case, i.e., when 8 cores are used in Fig. 22. Figure 24 and Table 5 presents results of these measurements. Results perfectly matches Fig. 22 for 8 cores per MPI process. As a result, the hybrid parallelization is better for 512 cores or more in this case.

Execution times (s) for a single time iteration of \(T_{COM1}\) and \(T_{COM2} + T_{task}\) for 8 cores for task parallelization. Verification of the Eq. (8)
6.6 Fusion Evaluation
In this section we propose an evaluation of the fusion optimization. From the TSP tree computed by MSC it may be possible, according to some specific conditions, to merge the domain loops of some kernels, thus optimizing the use of cache memories. This kind of optimization is called a fusion and three fusion optimizations have been introduced in Sect. 5.4. Among them, the two first ones (Figs. 12 and 13 on page 22) have been automatically detected by MSF in this case study.
Figure 25 shows the number of iterations per second as a function of the number of cores with and without fusions. This benchmark is performed on FullSWOF2D onto a \(500 \times 500\) domain size with 200 time iterations, and by using data parallelism alone (without tasks). As explained in Sect. 5.4, the MSF loop fusion happens at a high level. Most of the time such fusions are done naturally by a computer scientist. However, an automatic detection of such fusions avoids errors, particularly for a parallel execution. In addition to this, more advanced fusion cases, such as a scatter, are more difficult to deduce. In FullSWOF2D a total of 62 fusions are proposed by MSF over a total of 98 computation kernels. Figure 25 shows that the performance is clearly improved (around 40%) by these fusions.

Strong scaling on a \(500 \times 500\) domain size with 200 time iterations, with and without fusions proposed by MSF
However, fusion optimizations are not always relevant. To illustrate this, we are using the same benchmark of FullSWOF2D onto a \(500 \times 500\) domain size with 200 time iterations, however we compare data parallelism and hybrid parallelism both with and without fusion.
Blue curves of Fig. 26 represent results for data parallelism with and without fusion. One can note that the best performance, as expected, is reached by the version using fusions. Red curves represent results by using 2 cores per MPI process dedicated to tasks, with and without fusion again. One can note that the best performance is also reached by the version using fusion.

Strong scaling on a \(500 \times 500\) domain size with 200 time iterations. Blue curves represent strong scaling for data parallelism with and without fusion. Red curves represent strong scaling by using 2 cores per MPI process dedicated to tasks, with and without fusion (Color figure online)
However, to deeper analyze this results, we propose a second evaluation presented in Fig. 27. The blue curves are exactly the same one than in Fig. 26. The red curves, on the other hand, represent results by using 8 cores per MPI process dedicated to tasks, with and without fusion. Interesting results appears in this figure as the hybrid version using fusions is less efficient than the one without fusions. As already explained, this result is due to the fact that fusions reduce the number of tasks from 98 to 36 resulting in a non optimized use of eight cores for task parallelism. By using only 2 cores per MPI process (in Fig. 26) the 36 computation kernels were enough to feed the two cores, while it is not for eight.

Strong scaling on a \(500 \times 500\) domain size with 200 time iterations. Blue curves represent strong scaling for data parallelism with and without fusion, thus are exactly the same than blue curves of Fig. 26. Red curves represent strong scaling by using 8 cores per MPI process dedicated to tasks, with and without fusion (Color figure online)
In conclusion, if fusion optimization incurs a too large reduction of the number of tasks to feed dedicated cores, the problem observed for 16 cores in Fig. 22 happens earlier which reduces performance. For this reason, MSF performs fusions only when data parallelization is used alone. This choice could be more intelligent but this is the subject of future work.
7 Related Work
Many domain specific languages have been proposed for the optimization of single stencil computations. Each one has its own optimization specificities and targets a specific numerical method or a specific kind of mesh. For example, Pochoir [30] focuses on cache optimization techniques for stencils applied onto Cartesian meshes. On the other hand, PATUS [8] proposes to add a parallelization strategy grammar to its stencil language to perform an auto-tuning parallelization. ExaSlang [28] is specific to multigrid numerical methods. Thus, these stencil compilers target a different scope than the Multi-Stencil Framework presented in this paper, which actually orchestrates a parallel execution of multiple stencil codes together. Hence, an interesting future work would be to combine these stencil compilers with MSF to build very optimized stencil kernels K.
Some solutions, closer to MSF, have also been proposed to automatically orchestrate multiple stencils and computations in a parallel manner. Among them is Halide [26] that proposes an optimization and parallelization of a pipeline of stencils. However, Halide is limited to Cartesian meshes and is specific to images. Liszt [14], OP2 [18] and Nabla [7] all offer solutions for the automatic parallel orchestration of stencils applied onto any kind of mesh, from Cartesian to unstructured meshes. The needed mesh can be built from a set of available symbols in the grammar of each language. Thus, these languages generalize the definition of a mesh, as it is proposed into the MSL formalism of Sect. 3. However, neither Liszt, OP2 nor Nabla handle hybrid parallelism as it is proposed by MSF.
MSF offers the MSL Domain Specific Language to the numerician to describe its sequential set of computations. This description, is close to a dataflow representation. However, MSL differs from general purpose dataflow languages or framework for two main reasons. First, MSL is specific to numerical simulations and proposes a mesh abstraction adapted to numerical simulations. Thus, compared to general purpose dataflow runtimes such as Legion [4], HPX [19], PFunc [20], MSL is closer to the semantic of the domain (mesh, stencils etc.) and easier to use for non-specialists. Second, MSL is very light and only descriptive. Numerical codes are left to another language and another user (the developer in Fig. 2 on page 5). Furthermore, such dataflow runtimes could actually be used by MSF as back-ends, instead of using SkelGIS or OpenMP.
This flexibility proposed by MSF is due to software engineering capacities introduced by proposing a meta-model and by using a component programming model. Actually, MSF is designed to increase separation of concerns and code-reuse compared to existing solutions. Separation of concerns is illustrated in Fig. 2 and all along the paper. The numerician is only responsible for the description of the simulation by using MSL. A HPC specialist can propose new (or updated) components for handling the distributed data structure and quantities of the simulation. MSF generates from these pieces of information the parallel orchestration of computations. Finally, the developer of numerical codes fills computation kernels by using the chosen distributed data structure. In Liszt, OP2 and Nabla, for example, there is no such separation of concerns between the numerician and the developer. Moreover, it is not possible to easily integrate a new distributed data structure in these solutions as a monolithic code is generated. Finally, thanks to components, MSF improves code-reuse. Kernel components as well as any component (except the scheduler component which is specific to the simulation) can be reused from one simulation to another.
To conclude and as far as we know, no component-based framework has been proposed for stencils orchestration.
8 Conclusion
In this paper, we have presented MSF, a multi-stencil framework. MSF is built upon a meta-formalism of a multi-stencil program that we have presented in Sect. 3. From this meta-formalism, we have designed, first, the generic component assembly of a multi-stencil program, and second, the domain specific language MSL that enables the description of a specific application by a numerician. From these entries, MSC, the MSF compiler, automatically generates a parallel component assembly. This assembly represents the parallel orchestration of computations, independently of implementation choices. Two parallelization strategies are supported: data parallelization and hybrid (data and task) parallelization.
By combining a meta-model and component-based programming, MSF has the particularity to enhance separation of concerns, as well as code-reuse and composition of existing solutions (e.g., SkelGIS and OpenMP in this paper). MSF has been evaluated on the real case simulation FullSWOF2D. Results show that the MSF runtime does not induce unwanted overheads for its data parallelization technique on both strong and weak scalings. Results also show that the hybrid parallelization supported by MSF can increase performance when the data parallelism exposed by the simulation is not enough, which is a new contribution compared to existing solutions. Finally, we have evaluated the fusion optimization and shown that it often increases performance but it is not always a good choice, particularly when performing hybrid parallelism.
Many perspectives of future work raise from this paper. First, even if using one distributed data structure or another is possible and facilitated by MSF, the HPC specialist still has to understand component programming models and the meta-model of the framework to add new implementation of DDS and Data components. We think it could be interesting to also facilitate the work of the HPC specialist by proposing a semi-automated framework to add new implementations of these components to MSF.
Second, it has been shown in the performance model and evaluation results that the choice between data parallelism and hybrid parallelism in not trivial. It depends on the time spent in computations, the number of cores and nodes used for the execution, as well as the network behavior (Figs. 21 and 22). MSF, thanks to its meta-formalism and to the use of component models, easily handles the activation of one parallelism technique or another. Thus, MSF can be considered as a performance leverage for multi-stencil programs. However, it would be interesting to investigate how an algorithm could choose the best parallelization technique for a given execution of a multi-stencil simulation.
The same choice problem is raised by the fusion optimization. For the same reasons an algorithm could choose the best solution for a given execution. To design such an algorithm different solutions should be studied, such as following an approximated behavior model, or using calibration runs to then use deep learning algorithms, etc.
Finally, by using component models doors are opened to reconfiguration of applications [22] which means that the application could adapt its behavior and structure to external events.
Notes
L2C has been recently extended with the possibility of static linking.
References
Allan, B.A., et al.: A component architecture for high-performance scientific computing. Int. J. High Perform. Comput. Appl. 20(2), 163–202 (2006)
Augonnet, C., Thibault, S., Namyst, R., Wacrenier, P.-A.: StarPU: a unified platform for task scheduling on heterogeneous multicore architectures. Concurr. Comput. Pract. Exp. 23(2), 187–198 (2011)
Baude, F., Caromel, D., Dalmasso, C., Danelutto, M., Getov, V., Henrio, L., Pérez, C.: Gcm: a grid extension to fractal for autonomous distributed components. Ann. Telecommun. 64(1–2), 5–24 (2009)
Bauer, M., Treichler, S., Slaughter, E., Aiken, A.: Legion: expressing locality and independence with logical regions. In: International Conference on High Performance Computing, Networking, Storage and Analysis. IEEE (2012)
Bigot, J., Hou, Z., Prez, C., Pichon, V.: A low level component model easing performance portability of hpc applications. Computing 96(12), 1115–1130 (2014)
Bigot, J., Pérez, C.: Increasing Reuse in Component Models through Genericity. Research Report RR-6941 (2009)
Camier, J.-S.: Improving performance portability and exascale software productivity with the∇ numerical programming language. In: Proceedings of the 3rd International Conference on Exascale Applications and Software, EASC ’15, pp. 126–131. University of Edinburgh, Edinburgh (2015)
Christen, M., Schenk, O., Burkhart, H.: PATUS: a code generation and autotuning framework for parallel iterative stencil computations on modern microarchitectures. In: Parallel and Distributed Processing Symposium (IPDPS), 2011 IEEE International, pp. 676–687. IEEE (2011)
Cordier, S., Coullon, H., Delestre, O., Laguerre, C., Le, M.H., Pierre, D., Sadaka, G.: Fullswof paral: comparison of two parallelization strategies (mpi and skelgis) on a software designed for hydrology applications. In: ESAIM: Proceedings, vol. 43, pp. 59–79. EDP Sciences (2013)
Coullon, H., Limet, S.: The SIPSim implicit parallelism model and the SkelGIS library. Pract. Exp. Concurr. Comput. 28, 2120–2144 (2015)
Coullon, H., Limet, S.: Algorithmic skeleton library for scientific simulations: Skelgis. In: International Conference on High Performance Computing and Simulation, HPCS 2013, Helsinki, Finland, July 1–5, 2013, pp. 429–436 (2013)
Coullon, H., Limet, S., Le Minh, H.: Parallelization of shallow-water equations with the algorithmic skeleton library SkelGIS. In: Elsevier (ed.) ICCS, volume 18 of Procedia Computer Science, pp. 591–600. Elsevier, Barcelone (2013)
Dagum, L., Menon, R.: Openmp: an industry standard api for shared-memory programming. IEEE Comput. Sci. Eng. 5(1), 46–55 (1998)
DeVito, Z., Joubert, N., Palacios, F., Oakley, S., Medina, M., Barrientos, M., Elsen, E., Ham, F. , Aiken, A., Duraisamy, K., Darve, E., Alonso, J., Hanrahan, P.: Liszt: a domain specific language for building portable mesh-based pde solvers. In: Proceedings of 2011 International Conference for High Performance Computing, Networking, Storage and Analysis, SC ’11, pp. 9:1–9:12. ACM, New York (2011)
ETP4HPC. ETP4HPC Strategic Research Agenda Achieving HPC leadership in Europe. Technical report, ETP4HPC (2013)
Ferrari, S., Saleri, F.: A new two-dimensional shallow water model including pressure effects and slow varying bottom topography. M2AN Math. Model. Numer. Anal. 38(2), 211–234 (2004)
Gautier, T., Lima, J.V.F., Maillard, N., Raffin, B.: Xkaapi: a runtime system for data-flow task programming on heterogeneous architectures. In: Proceedings of the 2013 IEEE 27th International Symposium on Parallel and Distributed Processing, IPDPS ’13, pp. 1299–1308. IEEE Computer Society, Washington (2013)
Giles, M.B., Mudalige, G.R., Sharif, Z., Markall, G., Kelly, P.H.J.: Performance analysis of the OP2 framework on many-core architectures. SIGMETRICS Perform. Eval. Rev. 38(4), 9–15 (2011)
Kaiser, H., Heller, T., Adelstein-Lelbach, B., Serio, A., Fey, D.: Hpx: a task based programming model in a global address space. In: Proceedings of the 8th International Conference on Partitioned Global Address Space Programming Models, PGAS ’14, pp. 6:1–6:11. ACM, New York (2014)
Kambadur, P., Gupta, A., Ghoting, A., Avron, H., Lumsdaine, A.: Pfunc: modern task parallelism for modern high performance computing. In: Proceedings of the Conference on High Performance Computing Networking, Storage and Analysis, SC ’09, pp. 43:1–43:11. ACM, New York (2009)
Lachat, C., Pellegrini, F., Dobrzynski, C.: PaMPA: parallel mesh partitioning and adaptation. In: 21st International Conference on Domain Decomposition Methods (DD21), Rennes, France. INRIA Rennes-Bretagne-Atlantique (2012)
Lanore, V. Pérez, C.: A reconfigurable component model for hpc. In: Proceedings of the 18th International ACM SIGSOFT Symposium on Component-Based Software Engineering, CBSE ’15, pp. 1–10. ACM, New York (2015)
Nieplocha, J., Palmer, B., Tipparaju, V., Krishnan, M., Trease, H., Aprà, E.: Advances, applications and performance of the global arrays shared memory programming toolkit. Int. J. High Perform. Comput. Appl. 20(2), 203–231 (2006)
Object Management Group. Corba component model 4.0 specification. Specification Version 4.0, Object Management Group (2006)
Pellegrini, F., Roman, J.: Scotch: a software package for static mapping by dual recursive bipartitioning of process and architecture graphs. In: Proceedings of the International Conference and Exhibition on High-Performance Computing and Networking, HPCN Europe 1996, pp. 493–498. Springer, London (1996)
Ragan-Kelley, J., Barnes, C., Adams, A., Paris, S., Durand, F., Amarasinghe, S.: Halide: a language and compiler for optimizing parallelism, locality, and recomputation in image processing pipelines. In: Proceedings of the 34th ACM SIGPLAN Conference on Programming Language Design and Implementation, PLDI ’13, pp. 519–530. ACM, New York (2013)
Richard, J., Lanore, V., Pérez, C.: Towards application variability handling with component models: 3d-fft use case study. In Proceedings of the 8th Workshop on UnConventional High Performance Computing (UCHPC), Vienna, Austria (To appear) (2015)
Schmitt, C., Kuckuk, S., Hannig, F., Köstler, H., Teich, J.: Exaslang: a domain-specific language for highly scalable multigrid solvers. In: Proceedings of the Fourth International Workshop on Domain-Specific Languages and High-Level Frameworks for High Performance Computing, WOLFHPC ’14, pp. 42–51. IEEE Press, Piscataway (2014)
Szyperski, C.: Component Software: Beyond Object-Oriented Programming, 2nd edn. Addison-Wesley Longman Publishing Co., Inc, Boston (2002)
Tang, Y., Chowdhury, R.A., Kuszmaul, B.C., Luk, C.-K., Leiserson, C.E.: The pochoir stencil compiler. In: Fortnow L., Vadhan S.P. (eds.) SPAA, pp. 117–128. ACM (2011)
Valdes, J., Tarjan, R.E., Lawler, E.L.: The recognition of series parallel digraphs. In: Proceedings of the Eleventh Annual ACM Symposium on Theory of Computing, STOC ’79, pp. 1–12. ACM, New York (1979)
Acknowledgements
This work has partially been supported by the PIA ELCI project of the French FSN. This work was granted access to the HPC resources of TGCC under the allocations t2015067470, x2016067617 and AP010610191 made by GENCI.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Coullon, H., Bigot, J. & Perez, C. Extensibility and Composability of a Multi-Stencil Domain Specific Framework. Int J Parallel Prog 47, 1046–1085 (2019). https://doi.org/10.1007/s10766-017-0539-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10766-017-0539-5