
Abstract
In a recent contribution, Kumar et al. (J Mech Phys Solids 142:104027, 2020) have introduced a comprehensive macroscopic phase-field theory for the nucleation and propagation of fracture in linear elastic brittle materials under arbitrary quasistatic loading conditions. The theory can be viewed as a natural generalization of the phase-field approximation of the variational theory of brittle fracture of Francfort and Marigo (J Mech Phys Solids 46:1319–1342, 1998) to account for the material strength at large. This is accomplished by the addition of an external driving force—which physically represents the macroscopic manifestation of the presence of inherent microscopic defects in the material—in the equation governing the evolution of the phase field. The main purpose of this paper is to continue providing validation results for the theory by confronting its predictions with direct measurements from three representative types of experimentally common yet technically challenging problems: (i) the indentation of glass plates with flat-ended cylindrical indenters and the three-point bending of (ii) U-notched and (iii) V-notched PMMA beams.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the first part of a recent contribution, Kumar et al. (2020) have argued that any formulation that aims at providing a complete macroscopic theory of nucleation and propagation of fracture in homogeneous elastic brittle materials must account for three material inputs:
- i.:
-
the elasticity of the material,
- ii.:
-
its strength at largeFootnote 1, and
- iii.:
-
its critical energy release rate.
This is because—based on the myriad of experimental observations that have been amassed over the past hundred years on numerous nominally brittle ceramics, metals, and polymers alike—Kumar et al. (2020) posit that nucleation of fracture
-
in the bulk (under uniform states of stress) is governed by the strength of the material,
-
from largeFootnote 2 pre-existing cracks is governed by the Griffith competition between the elastic energy and fracture energy,
-
from boundary points, be them smooth or sharp, and small pre-existing cracks is governed by the interaction among the strength, the elastic energy, and the fracture energy of the material,
while propagation of fracture
-
is, akin to nucleation from large pre-existing cracks, also governed by the Griffith competition between the elastic and fracture energies.
The term homogeneous merits explicit clarification. It refers, in the usual manner, to materials for which the above three inputs i through iii can be considered as intrinsic properties and thus independent of the geometry of the structural problem at hand. This requires that the underlying heterogeneities in the material, including its inherent defects from which fracture may originate, must be “much smaller” than the characteristic length scale of the structure and the scale of variation of the applied loads. At present, the precise meaning of the qualifier “much smaller” has been well established only for the first of the above three material inputs, and this just for linear elastic materials. For those, direct calculations show that the elasticity of heterogeneous materials wherein the length scale of the underlying heterogeneities is a mere 4 times smaller than the structural size can already be treated effectively as homogeneous; see, e.g., Drugan and Willis (1996). The situation for the strength and the critical energy release rate is more delicate and not yet settled. Numerous efforts have been and continue to be devoted to gaining insight into the latter; see, e.g., the works of Gao and Rice (1989), Bower and Ortiz (1991), Cox and Yang (2006), Hossain et al. (2014), Hsueh and Bhattacharya (2016), Schneider (2020), Michel and Suquet (2022). On the other hand, much less work has been dedicated to pinpointing when the strength of a material may be considered as an intrinsic property, presumably because of the technical difficulties of carrying out experiments where the sizes of the inherent defects—both within the bulk and on the boundary of any given piece of material—are controlled with sufficient accuracy, and, on the theoretical front, also because of the lack of appropriate mathematical definitions of defects and of their homogenization.
In the most basic setting, that of homogeneous isotropic linear elastic brittle materials, the argument of Kumar et al. (2020) entails precisely that any formulation that aims at providing a complete macroscopic theory of nucleation and propagation of fracture must incorporate as material inputs the stored-energy function
describing the elastic response of the material, the strength surface
describing its strength under arbitrary uniform stress conditions, and the critical energy release rate
describing the growth of cracks within it. Making use of standard notation, the coefficients \(\lambda \) and \(\mu \) in expression (1) stand for the first and second Lamé moduli of the material. In expression (2), \(\sigma _1\), \(\sigma _2\), \(\sigma _3\) stand for the eigenvalues of the Cauchy stress tensor \(\varvec{\sigma }\), that is, the principal Cauchy stresses. Because of the assumption of material isotropy invoked here, the dependence on \(\varvec{\sigma }\) enters only via \(\sigma _1\), \(\sigma _2\), \(\sigma _3\).
At this point, it is important to emphasize that standardized tests to measure the elastic material constants \(\lambda \) and \(\mu \) and the critical energy release rate \(G_c\) for a given material of interest have long been available and can now be readily carried out with conventional equipment; see, e.g., Chapter 6 in the monograph by Zehnder (2012). By contrast, it is extremely difficult to carry out experiments that probe the entire space of uniform stresses in order to measure the entire strength surface (2) for a given material of interest. Indeed, most of the experimental strength data available in the literature is narrowly restricted to uniaxial tensile and compressive strength when the state of uniform stress is of the form \(\varvec{\sigma }=\mathrm{diag}(\sigma _{1},0,0)\) with \(\sigma _{1}>0\) and \(\sigma _{1}<0\). To a lesser extent, there is also strength data available for the more general subset of plane-stress conditions when \(\varvec{\sigma }=\mathrm{diag}(\sigma _{1},\sigma _{2},0)\), which includes as a special case shear strength data when \(\sigma _{2}=-\sigma _{1}\); see, e.g., Chapter 10 in the book by Munz and Fett (1999) and references therein. Another key difference between \(\lambda \), \(\mu \), \(G_c\), and the strength surface (2) is that the latter is inherently stochastic. This is because the strength at a macroscopic material point depends on the nature of the underlying defects from which fracture initiates, and this is known to exhibit a stochastic spatial variation in any given piece of material. This spatial variation is most acute when comparing material points within the bulk of the given piece with material points on its boundary, since different fabrication processes or boundary treatments (such as polishing or chemical treatments) can drastically affect the nature of boundary defects vis-à-vis those in the bulk.
In the latter part of their contribution, having pinpointed the above-enumerated requirements, Kumar et al. (2020) introduced a comprehensive macroscopic theory of nucleation and propagation of fracture—regularized, of phase-field type—in linear elastic brittle materials under arbitrary quasistatic loading conditions that incorporates directly (1), (2), (3) as the material inputs. The theory corresponds to a generalization of the phase-field regularization (Bourdin et al. 2000) of the variational theory of brittle fracture of Francfort and Marigo (1998), which in turn corresponds to the mathematical statement of Griffith’s fracture postulate in its general form of energy cost-benefit analysis (Griffith 1921). In the footstep of Kumar et al. (2018a), the generalization amounts: (i) to considering the Euler–Lagrange equations of the standard phase-field regularization—and not the variational principle itself—as the primal model and (ii) to adding an external driving force in the Euler–Lagrange equation governing the evolution of the phase field to describe the macroscopic manifestation of the presence of the inherent defects in the material, that is, its strength at large.
As a first validation step, Kumar et al. (2020) also provided in their paper direct comparisons between predictions obtained from the theory and experimental results on a wide range of materials (titania, graphite, polyurethane, PMMA, and alumina) under loading conditions that spanned the full range of fracture nucleation settings (within the bulk, from large pre-existing cracks, boundary points, and small pre-existing cracks).
The main purpose of this paper is to continue providing validation results for the theory of Kumar et al. (2020). We do so by confronting its predictions with representative experimental results for the nucleation and propagation of fracture in indentation and notch problems. We focus in particular on the indentation of glass plates with flat-ended cylindrical indenters and the three-point bending of U-notched and V-notched PMMA beams. The rationale for our choice is twofold. On the one hand, these types of problems are very common in the experimental literature. On the other hand, their analysis is technically challenging because of the singular or high-gradient elastic fields that they feature prior to the nucleation of fracture. We begin in Sects. 2 and 3 by summarizing the general fracture theory of Kumar et al. (2020) and its specialization to the prototypical case of Drucker–Prager strength surfaces. We then present its application in Sects. 4, 5, and 6 to the indentation, U-notch, and V-notch problems, respectively. We close by recording some concluding remarks in Sect. 7.
2 The revisited phase-field approach to brittle fracture
Consider a structure made of an isotropic linear elastic brittle material, with stored-energy function (1), strength surface (2), and critical energy release rate (3), that occupies an open bounded domain \(\mathrm {\Omega }\subset {\mathbb {R}}^3\), with boundary \(\partial \mathrm {\Omega }\) and unit outward normal \(\mathbf{N}\), in its undeformed and stress-free configuration at time \(t=0\). At a later time \(t \in (0, T]\), due to an externally applied displacement \({\overline{\mathbf{u}}}(\mathbf{X}, t)\) on a part \(\partial \mathrm {\Omega }_{\mathcal {D}}\) of the boundary and a traction \(\overline{{{\textbf {t}}}}(\mathbf{X},t)\) on the complementary part \(\partial \mathrm {\Omega }_{\mathcal {N}}=\partial \mathrm {\Omega }\setminus \partial \mathrm {\Omega }_{\mathcal {D}}\), the position vector \(\mathbf{X}\) of a material point moves to a new position specified by
in terms of the displacement field \(\mathbf{u}\). We write the infinitesimal strain tensor as
In response to the same externally applied mechanical stimuli that result in the above-described deformation, cracks can also nucleate and propagate in the structure. Those are described in a regularized fashion by the order parameter or phase field
taking values in [0, 1]. Precisely, \(v=1\) identifies regions of the sound material, whereas, in the limit as \(\varepsilon \searrow 0\), \(0\le v<1\) identifies regions of the material that have been fractured.
According to the theory of Kumar et al. (2020), the displacement field \(\mathbf{u}_k(\mathbf{X})=\mathbf{u}(\mathbf{X},t_k)\) and phase field \(v_k(\mathbf{X})=v(\mathbf{X},t_k)\) at any material point \(\mathbf{X}\in \overline{\mathrm {\Omega }}\) and discrete time \(t_k\in \{0=t_0,t_1,\ldots ,t_m,\) \(t_{m+1},\ldots ,\) \(t_M=T\}\) are determined by the system of coupled partial differential equations (PDEs)
and
with \(\mathbf{u}(\mathbf{X},0)\equiv {{\textbf {0}}}\) and \(v(\mathbf{X},0)\equiv 1\), where \(\nabla \mathbf{u}_k(\mathbf{X})=\nabla \mathbf{u}(\mathbf{X},t_k)\), \(\nabla v_k(\mathbf{X})=\nabla v(\mathbf{X},t_k)\), \(\triangle v_k(\mathbf{X})= \triangle v(\mathbf{X},\) \(t_k)\), and where \(\varepsilon >0\) is a regularization or localization length and \(c_\texttt {e}(\mathbf{X},t)\) is a driving force whose specific constitutive prescription depends on the particular form of the strength surface (2). In the next section, we spell out a specific form for \(c_\texttt {e}(\mathbf{X},t)\) for the prototypical case of Drucker–Prager strength surfaces.
Remark 1
The localization length \(\varepsilon \) in equations (4)–(5) is just a regularization parameter that is void of any further physical meaning. In practice, it should be selected to be smaller than the smallest characteristic length scale in the structural problem at hand. Numerical evidence of the independence of the solution of (4)–(5) on \(\varepsilon \) was reported in Section 4.3 in (Kumar et al. 2020) for problems involving nucleation in the bulk under states of uniform stress, nucleation from large and small pre-existing cracks, as well as for problems involving propagation of cracks. As an Appendix to this paper, for completeness, we report further results illustrating this independence within the context of the specific boundary-value problems analyzed in this work.
Remark 2
The inequalities in (5) embody the classical assumption also adopted here that fracture is a purely dissipative and irreversible process. As elaborated in Section 2 of Kumar et al. (2018a), however, a generalization that would account for the possibility of healing is straightforward; see also Francfort et al. (2019). From an implementation point of view, we make use of a penalty method to enforce the irreversibility of the phase field \(v(\mathbf{X},t)\); see Remark 4 in Kumar et al. (2020).
Remark 3
On their own, Eqs. (4) and (5) are second-order elliptic PDEs for the displacement field \(\mathbf{u}\) and the phase field v. Accordingly, their numerical solution is amenable to a standard finite-element staggered scheme in which (4) and (5) are discretized with finite elements and solved iteratively one after the other at every time step \(t_k\) until convergence is reached. All the simulations presented in this paper are generated with such a scheme. A FEniCS implementation of the schemeFootnote 3 is available in GitHub.
3 The external driving force \(c_{\texttt {e}}\) for Drucker–Prager strength surfaces
In practice, as alluded to above, the strength surface (2) of a given material of interest is only partly known. In fact, often times, only its uniaxial tensile and compressive strengths are freely available in the literature. To deal with this lack of experimental results, one usually resorts to the use of a model that can fit and extrapolate the available strength data to the entire stress space. In all the simulations that we present below, among a plurality of possibilities—see, e.g., Rankine (1857), Drucker and Prager (1952), Bresler and Pister (1958), Willam and Warnke (1975), and Christensen et al. (2002) to name a few—we make use of Drucker–Prager strength surfaces:
In this expression,
where \(\varvec{\sigma }_D=\varvec{\sigma }-1/3\left( \mathrm{tr}\,\varvec{\sigma }\right) \mathbf{I}\), and \(\gamma _0\) and \(\gamma _1\) are two material constants. In the sequel, we shall calibrate these constants with the uniaxial tensile and compressive strengths, say \(\sigma _{\texttt {ts}}\) and \(\sigma _{\texttt {cs}}\), of the given material. They then specialize to
and
Remark 4
The two-material-parameter strength surface (6), originally introduced by Drucker and Prager (1952) to model the yielding of soils, is arguably the simplest model that is capable of describing reasonably well the strength of many nominally brittle materials; see Chapter 10 in Munz and Fett (1999) and Section 2 in Kumar et al. (2020), for instance.
Having settled on the choice of Drucker–Prager strength surfaces (6), we follow the blueprint provided by Kumar et al. (2020) for constructing external driving forces \(c_{\texttt {e}}\) and set
where
\(I_1\) and \(J_2\) stand for the invariants (7) of the Cauchy stress
and, hence, read as
with \(\mathbf{E}_D(\mathbf{u})=\mathbf{E}(\mathbf{u})-1/3\left( \mathrm{tr}\,\mathbf{E}(\mathbf{u})\right) \mathbf{I}\) in terms of the displacement field \(\mathbf{u}\) and phase field v, and where \(\delta ^\varepsilon \) is a unitless \(\varepsilon \)-dependent coefficient whose calibration needs to be carried out numerically. Precisely, as elaborated in Subsection 4.3.2 in Kumar et al. (2020), for a given set of material constants \(\lambda \), \(\mu \), \(G_c\), \(\sigma _{\texttt {ts}}\), \(\sigma _{\texttt {cs}}\), and a given finite localization length \(\varepsilon \), the value of \(\delta ^\varepsilon \) is determined by considering any boundary-value problem of choice for which the nucleation from a large pre-existing crack can be determined exactly—according to Griffith’s sharp theory of brittle fracture for linear elastic materials (LEFM)—and then by having the phase-field theory (4)–(5) with external driving force (8) match that exact solution thereby determining \(\delta ^\varepsilon \). The calibration of the parameter \(\delta ^\varepsilon \) is what allows the governing equations (4)-(5) to marry the concept of strength in the bulk with the concept of Griffith energy competition at crack singularities.
Remark 5
As required by the construction process laid out by Kumar et al. (2020), the external driving force (8) is asymptotically identical in the limit as \(\varepsilon \searrow 0\) to that utilized by Kumar et al. (2020) in their comparisons with experiments, but differs from it in that it has an additional correction of \(O(\varepsilon ^0)\): its last term \((1-\sqrt{I_1^2}/I_1)(J_2/2\mu +I_1^2/6(3\lambda +2\mu ))\). This additional correction is non-zero only when \(I_1<0\) and we include it here in order to have an improved description of the compressive part (when \(I_1<0\)) of the given material strength surface (6) for a larger range of finite values of the localization length \(\varepsilon \).
For direct comparison, Fig. 1 shows the cross section in the \((\sigma _1,\sigma _2)\)-space for stress states with \(\sigma _3=0\) of the strength surface predicted by the external driving force (8) and that predicted by the external driving force introduced in Kumar et al. (2020). The results are shown for the borosilicate glass studied in the next section for localization length \(\varepsilon =26\) \({\mu }\)m. The figure includes the Drucker–Prager strength surface (6) to which both results converge to in the limit as \(\varepsilon \searrow 0\). It is plain that the external driving force (8) indeed produces a better approximation of that Drucker–Prager strength surface for finite values of the localization length \(\varepsilon \).

The strength surfaces in the \((\sigma _1,\sigma _2)\)-space for stress states with \(\sigma _3=0\) for borosilicate glass (see Sect. 4 below) and localization length \(\varepsilon =26\) \({\mu }\)m, as predicted by the external driving force (8) and the external driving force introduced in Kumar et al. (2020). For direct comparison, the Drucker–Prager strength surface (6) to which both results converge to in the limit as \(\varepsilon \searrow 0\) is also included
4 Application to the indentation of glass plates with flat-ended cylindrical indenters
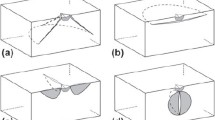
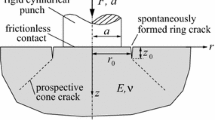
In this section, we confront the predictions generated by the fracture phase-field theory (4)–(5) with external driving force (8) to the experiments of Mouginot and Maugis (1985) for the indentation of borosilicate glass plates with flat-ended steel cylindrical indenters. As schematically depicted in Fig. 2a, these authors indented \(50 \,\mathrm{mm}\, \times 50 \,\mathrm{mm}\, \times 25.4 \,\mathrm{mm}\) glass plates with flat punches of six different radii, \(A=0.05, 0.10, 0.25, 0.50, 1.00,\) and 2.50 mm. The specimens were indented at the fixed displacement rate of \({\dot{u}}=0.83\) \(\mu \)m/s. Prior to their indentation, the surfaces of the specimens were abraded with different grades of abrasive paper or diamond paste. The most complete set of results that were reported, and hence the one for which we carry out the comparisons here, pertains to specimens that were abraded with a 1000 grit silicon carbide paper (labeled SiC 1000).

Schematics a of the initial specimen geometry and applied boundary conditions for the indentation experiments carried out by Mouginot and Maugis (1985) on borosilicate glass and b of the geometry of the cracks that they observed at large enough applied displacements u
Before proceeding with the comparisons per se, it is pertinent to mention that since the pioneering experiments of Hertz (1882) a multitude of investigators have studied how fracture nucleates and propagates in many nominally brittle ceramics, metals, and polymers when indented; see, e.g., the reviews by Lawn (1998), Guin and Gueguen (2019), and references therein. Yet, it was just very recently that the variational phase-field approach was used for the first time to study this kind of experimentally pervasive problems (Strobl and Seelig 2020). In a nutshell, Strobl and Seelig (2020) first demonstrated that the variational phase-field model in its classical form fails to generate results that are consistent with experimental observations. As elaborated at length in Section 3 of Kumar et al. (2020), the reason for this drawback lies in the fact that the variational phase-field approach to fracture does not account for one of the required three basic ingredients to model fracture nucleation: the strength surface of the material. They then proposed a modified phase-field model where de facto only certain “tensile” part \(W^+(\mathbf{E})\) of the elastic energy \(W(\mathbf{E})\) is involved in the fracture process and where the localization length \(\varepsilon \) is imparted physical meaning by tying up its value to the uniaxial tensile strength of the material at hand. This modified approach led to much improved predictions, although not without deficiencies, chief among these being the inability of the model to deal with arbitrary values of uniaxial tensile strength. As also elaborated at length in Section 3 of Kumar et al. (2020), the reason for this shortcoming lies in the fact that modifications of the variational phase-field approach to fracture based on imparting physical meaning to the localization length \(\varepsilon \) are incomplete because their purely energetic character render them incapable of describing strength surfaces at large. By construction, the revisited phase-field formulation (4)–(5) is free of such shortcomings.
4.1 Calibration of the material inputs entering the theory
Elasticity Based on their own ultrasound measurements, Mouginot and Maugis (1985) determined the Young’s modulus and Poisson’s ratio of their borosilicate glass to be \(E=80\) GPa and \(\nu =0.22\). We hence set the Lamé constants to
and
in our simulations.
Strength No direct experimental data on the borosilicate glass strength was provided by Mouginot and Maugis (1985). However, they did estimate that the roughness of the surfaces of the specimens, due to their abrading treatment, was of a few microns. This size of boundary defects is much larger than the typical nanometer size of the inherent defects in the bulk of glass. The strength of the glass on the boundary of the specimens is thus expected to be significantly smaller than that of the glass in the bulk of the same specimens. In our simulations, accordingly, we take the strength of the glass to be characterized by the piecewise-constant Drucker–Prager strength surface
with
where \({\mathcal {B}}^\varepsilon \) is the \(2\varepsilon \)-thick boundary layer depicted in Fig. 3, and where the values of the uniaxial tensile \(\sigma _{\texttt {ts}}\) and compressive \(\sigma _{\texttt {cs}}\) strengths are estimates from Fig. 7.29 in the review chapter by Guin and Gueguen (2019) on mechanical properties of glass, where the macroscopic strength of glass is related to the size of its microscopic defects.

Schematic of the boundary layer \({\mathcal {B}}^\varepsilon \) wherein the glass strength is taken to be smaller than that in the bulk because of the presence of larger defects
Remark 6
The choice of \(2\varepsilon \) as the thickness of the boundary layer \({\mathcal {B}}^\varepsilon \) is dictated by the fact that smaller thicknesses would go undetected by the \(\varepsilon \)-regularized theory (4)–(5). On the other hand, numerical experiments show that larger thicknesses do not significantly alter when or how cracks nucleate.
Remark 7
For definiteness, we do not consider here the full stochasticity of the strength of the glass. Within the proposed theory, however, it is a simple matter to do so by allowing the uniaxial tensile \(\sigma _{\texttt {ts}}\) and compressive \(\sigma _{\texttt {cs}}\) strengths in the strength surface (10) to take on spatially random values about some averages throughout the specimens.
Critical energy release rate Mouginot and Maugis (1985) did not carry out independent experiments to measure the critical energy release rate of their borosilicate glass. However, they did estimate it to be within the range \(5\,\mathrm{N/m}\le G_c \le 10\,\mathrm{N/m}\) directly from their indentation experiments. In our simulations we use the value
In our simulations, furthermore, we idealize the steel punch as rigid. Also, exploiting symmetry and the fact that the indenter radii \(A=0.05, 0.10, 0.25\), 0.50, 1.00, and 2.50 mm are much smaller than the dimensions \(50 \,\mathrm{mm}\, \times 50 \,\mathrm{mm}\, \times 25.4 \,\mathrm{mm}\) of the glass specimens, we idealize the problem to be axisymmetric. Recalling from Section 4.3 in Kumar et al. (2020) that the actual size of the regularized cracks is given by the relation \(\varepsilon ^\star =\varepsilon /\sqrt{1+\delta ^\varepsilon }\) and that the coefficient \(\delta ^\varepsilon \) depends on the strength material constants (11), we set the localization length to the sufficiently small piecewise-constant value
so that \(\varepsilon ^\star \) is one and the same in the entirety of the specimens. Indeed, for this localization length and the above-specified material parameters, the calibrated coefficient \(\delta ^\varepsilon =14.2\) in the boundary layer \({\mathcal {B}}^\varepsilon \) and \(\delta ^\varepsilon =2.62\) in the rest of the domain \({\mathrm \Omega }\setminus {\mathcal {B}}^\varepsilon \) so that \(\varepsilon ^\star \approx 6\) \(\mu \)m in the entirety of \({\mathrm \Omega }\). We carry out the simulations in an unstructured mesh of size \(h=1.5\) \(\mu \)m \(\approx \varepsilon ^\star /4 \) around the indenter where the cracks are expected to nucleate and propagate.
4.2 Theory vs. experiments
We are now in a position to deploy the theory (4)–(5) with external driving force (8), specialized to the stored-energy function (1) with elastic material constants (9), Drucker–Prager strength surface (10) with piecewise-constant uniaxial tensile \(\sigma _{\texttt {ts}}\) and compressive \(\sigma _{\texttt {cs}}\) strengths (11), and critical energy release rate (12), to simulate the indentation experiments of Mouginot and Maugis (1985).
Consistent with the experimental observationsschematically depicted in Fig. 2b, irrespective of the indenter radius A, all the simulations exhibit the following two successive events:
-
fracture nucleation occurs roughly in the form of a ring crack of depth H at a distance \(R>A\) away from the centerline of the indenter at some critical value \(u_{cr}\) of the applied displacement u,
-
subsequently, the crack proceeds its propagation, first rapidly and later on significantly more slowly, at a roughly constant angle \(\theta \) with respect to the surface of the specimen, forming thus a cone crack.

Contour plots of the phase field v predicted by the theory in the specimen indented with the indenter of radius \(A=1.00\) mm at five applied displacements u. Part a shows the instance at which fracture nucleates, while parts b–e show the ensuing propagation of the nucleated ring crack into a cone crack

Comparison between the predictions of the phase-field theory and the experiments of Mouginot and Maugis (1985) on borosilicate glass. a The normalized critical displacement \(u_{cr}/A\) and b the critical force \(P_{cr}\) at which the ring crack nucleates as functions of the radius A of the indenter. Solid lines interpolating between the phase-field results are included to aid visualization

Comparison between the predictions of the phase-field theory and the experiments of Mouginot and Maugis (1985) on borosilicate glass. a The normalized radial location R/A at which the ring crack nucleates and b its depth H as functions of the radius A of the indenter

Comparison between the predictions of the phase-field theory and the experiments of Mouginot and Maugis (1985) on borosilicate glass. a The growing diameter D of the cone crack as a function of the force P exerted by the indenter. b The angle \(\theta \) of the cone crack as a function of the radius A of the indenter; the experimental scatter in \(\theta \) is not included because it was not reported by Mouginot and Maugis (1985)
Figure 4 shows representative snapshots of the phase field v predicted by the theory for the case of the indenter with radius \(A=1.00\) mm that illustrate the above-outlined two events. Here, it is important to remark that the nucleation of fracture occurs in a region where the stress field is not singular but sharply shifts from a simple shear stress state at the surface of the specimen to a fully triaxial stress state in its adjacent bulk; for contours of the stress field prior to fracture, see for instance Chapter 5 in the monograph by Fischer-Cripps (2007). Nucleation is thus controlled by the strength surface (10) in the boundary layer \({\mathcal {B}}^\varepsilon \) of the specimen, in particular, the neighborhood around the shear strength (where \(\sigma _2=-\sigma _1\) and \(\sigma _3=0\)) in that surface, and not by the uniaxial tensile strength \(\sigma _{\texttt {ts}}\) of the material as often incorrectly suggested in the literature. Once nucleated, of course, the propagation of the crack is governed by the Griffith competition between the bulk elastic energy in the glass and its surface fracture energy.
In addition to the foregoing qualitative description of the fracture process, Mouginot and Maugis (1985) reported measurements of the radial locations R where the cracks nucleated, the critical values \(P_{cr}\) of the force P exerted by the indenter at which they first observed a fracture event, the angle \(\theta \) of the eventual cone cracks, as well as of their growing diameter D as a function of the indenter force P. Figures 5, 6, and 7 present comparisons between the predictions generated by the phase-field theory and such measurements. Since Mouginot and Maugis (1985) did not include results for the critical displacement \(u_{cr}\) or the depth H of the ring cracks, Figs. 5a and 6b only present the predictions from the theory. Also, since Mouginot and Maugis (1985) did not make precise what was the fracture event that they first observed, for definiteness, the theoretical predictions for \(P_{cr}\) that are plotted in Fig. 5b correspond to the values of the indenter force P at which the ring crack nucleates; it is likely that this event was indeed their first observation since the crack is several microns in length by then.
0It is plain from these comparisons that the theory is in good quantitative agreement with all the experimental results. It should be noted, however, that the critical force \(P_{cr}=0.03\) kN measured from the experiments with the smallest indenter of radius \(A=0.05\) mm is likely too large for the steel punch not to have yielded (since \(P_{cr}/\pi A^2=3.82\) GPa) and deformed substantially, as opposed to have remained undeformed as assumed in the simulations. It is also noteworthy that the experimental data features quite a bit of scatter, especially for the quantities R/A and \(P_{cr}\) associated with the nucleation. Presumably, this is because of the stochasticity introduced by the abrasion treatment of the surface of the specimens. Again, as noted above, such a stochasticity can be incorporated in the theory by having the strength material constants (here, \(\sigma _{\texttt {ts}}\) and \(\sigma _{\texttt {cs}}\)) in the strength surface (10) to take on spatially random values about some average. We do not include examples of such simulations here but, instead, refer the interested reader to Kumar and Lopez-Pamies (2021) for examples in the context of nucleation of fracture in natural rubber where strength stochasticity plays a key role.
5 Application to the three-point bending of U-notched PMMA beams
Next, we confront the theory to the experiments of Gómez et al. (2005) for the three-point bending of U-notched PMMA beams. Figure 8 shows a schematic of the initial geometry of the specimens and the applied boundary conditions. Results were reported for specimens with U notches of two depths, approximately \(A=5\) and 14 mm, and seven radii, approximately \(R=0.18\), 0.34, 0.52, 0.94, 1.47, 1.97, and 3.98 mm. The specimens were subjected to a prescribed displacement u, which was applied at the fixed rate of \({\dot{u}}=0.5\) \(\mu \)m/s; the corresponding force is denoted by P. With the objective of minimizing deviations from linear elastic brittle behavior, all the experiments were carried out at the low temperature of \(-60\) \(^{\circ }\)C.

Schematic of the initial specimen geometry and applied boundary conditions for the three-point bending experiments carried out by Gómez et al. (2005) on U-notched PMMA beams at \(-60\) \(^{\circ }\)C
5.1 Calibration of the material inputs entering the theory
Elasticity Based on their own uniaxial tension tests on carefully machined cylindrical samples, Gómez et al. (2005) determined the Young’s modulus and Poisson’s ratio of their PMMA at \(-60\) \(^{\circ }\)C to be roughly \(E=5.05\) GPa and \(\nu =0.40\). Therefore, the Lamé constants in our simulations are set to
and
Strength From the same uniaxial tension tests used to determine the elastic constants, Gómez et al. (2005) also estimated the uniaxial tensile strength to be roughly \(\sigma _{\texttt {ts}}=128\, \mathrm{MPa}\). In our simulations, accordingly, we take the strength of the PMMA at \(-60\) \(^{\circ }\)C to be characterized by the Drucker–Prager strength surface (10) with
where the compressive strength \(\sigma _{\texttt {cs}}\) is set to be twice as large as the tensile strength \(\sigma _{\texttt {ts}}\) in accordance with typical values at room temperature found elsewhere in the literature.
Remark 8
Gómez et al. (2005) stated that the U notches were carefully machined in their specimens. We therefore assume here that the sizes of the inherent defects in the bulk and on the boundary of the specimens are not fundamentally different and hence that the strength surface (10) with (15) applies to the entirety of the specimens. Much like in the preceding comparisons with glass, we also adopt in our simulations the idealization that the strength material constants (15) are deterministic as opposed to stochastic.
Critical energy release rate From their own compact and single-edge-notch tension tests, Gómez et al. (2005) measured the critical energy release rate of their PMMA at \(-60\) \(^{\circ }\)C to be roughly
We use this value in our simulations.
We make use of the sufficiently small localization length \(\varepsilon =12.5\) \(\mu \)m in all our simulations. For such a localization length and the above-specified material parameters, the calibrated coefficient \(\delta ^\varepsilon \) in the external driving force (8) takes the value \(\delta ^\varepsilon =2.4\). The size of the regularized cracks is hence given by \(\varepsilon ^\star =\varepsilon /\sqrt{1+\delta ^\varepsilon }\approx 6.9\) \(\mu \)m. We carry out the simulations under plane-strain conditions in an unstructured mesh of size \(h=3\) \(\mu \)m \(\approx \varepsilon ^\star /5\) around and ahead of the U-notch, where the cracks are expected to nucleate and propagate. Although the elastic fields are fully triaxial (neither plane-strain nor plane-stress), the plane-strain idealization is justified by 3D simulations that show that the results do not differ significantly from those of plane strain.
5.2 Theory vs. experiments
All the specimens tested by Gómez et al. (2005) showed a linear force-displacement (P versus u) response followed by complete rupture. Figure 9 compares the predictions generated by the phase-field theory with their experimental data for the maximum force \(P_{cr}\) reached in those force-displacement responses, which presumably indicate the points at which fracture nucleated. The results are shown as a function of the notch radius R for the two notch depths \(A=5\) and 14 mm that they considered.

Comparison between the predictions of the phase-field theory and the experiments of Gómez et al. (2005) on PMMA at \(-60\) \(^{\circ }\)C for the critical force \(P_{cr}\) at which fracture nucleates as a function of the notch radius R. Results are shown for the two notch depths \(A=5\) and 14 mm
Two comments are in order. First, the theory is in good quantitative agreement with the experimental results. Second, as expected, the results distinctly show that fracture nucleation transitions from being governed by the Griffith competition between bulk elastic energy and surface fracture energy to being governed by the strength of the material as the notch radius R increases.
Unfortunately, Gómez et al. (2005) did not include results on the location of fracture nucleation or details of its subsequent propagation. According to the theory, irrespective of the notch radius and depth, fracture nucleation occurs at the tip of the notch and propagates rapidly (more so the larger the notch radius) along the center plane of the specimens severing them into two halves. For completeness, Fig. 10 shows representative snapshots of the phase field v for the specimen with notch radius \(R=0.94\) mm and notch depth \(A=5\) mm at two values of the applied displacement u. Figure 10a shows the instance right after fracture nucleation, while Fig. 10b shows the instance right before the specimen is severed into two pieces.

Contour plots of the phase field v predicted by the theory in the U-notched beam with notch radius \(R=0.94\) mm and notch depth \(A=5\) mm at two applied displacements u; the plots are shown only in a region near the notch. Part a shows the instance at which fracture nucleates on the tip of the notch, while part b shows the instance at which the specimen is all but severed into two pieces
Remark 9
Here, it is important to note that, prior to nucleation of fracture, the elastic fields ahead of the notches in U-notched (as well as in V-notched) beams under three-point bending are fully triaxial with all principal stresses being positive (\(\sigma _1,\sigma _2,\sigma _3>0\)). This implies that it is the part of the strength surface that lies within the first octant in the space of principal stresses—and not solely the uniaxial tensile strength \(\sigma _{\texttt {ts}}\) as often assumed in the literature—the part of the strength that controls nucleation of fracture. By the same token, nucleation of fracture need not necessarily occur at the notch tip. For instance, for materials with weak hydrostatic strength, fracture may nucleate within the bulk ahead of the notch tip; see, e.g., the experiments of Aranda-Ruiz et al. (2020) on polycarbonate. According to the Drucker–Prager strength surface (10) with (15) assumed here for PMMA at \(-60\) \(^{\circ }\)C—for which the hydrostatic strength \(\sigma _{\texttt {hs}}=2\sigma _{\texttt {cs}}\sigma _{\texttt {ts}}/3(\sigma _{\texttt {cs}}-\sigma _{\texttt {ts}})=171\) MPa is significantly larger than the uniaxial tensile strength \(\sigma _{\texttt {ts}}=128\) MPa—the nucleation of fracture always occurs at the notch tip.
6 Application to the three-point bending of V-notched PMMA beams
Finally, we turn to confronting the theory to the experiments of Dunn et al. (1997) for the three-point bending of V-notched PMMA beams. A schematic of the initial geometry of the specimens and the applied boundary conditions used by these authors is shown in Fig. 11. They reported results for specimens with V notches of four depths, \(A=1.78\), 3.56, 5.33, and 7.11 mm, and three angles, \(\gamma =60^{\circ }\), \(90^{\circ }\), and \(120^{\circ }\). The specimens were subjected to a prescribed displacement u that was applied at the fixed rate of \({\dot{u}}=100\) \(\mu \)m/s; the corresponding force is denoted by P. In contrast to the experiments of Gómez et al. (2005) discussed in the preceding section, Dunn et al. (1997) performed all their experiments at room temperature.

Schematic of the initial specimen geometry and applied boundary conditions for the three-point bending experiments carried out by Dunn et al. (1997) on V-notched PMMA beams
6.1 Calibration of the material inputs entering the theory
Elasticity From their own uniaxial tension tests, Dunn et al. (1997) determined the Young’s modulus of their PMMA to be \(E=2.3\) GPa. While they did not measure the Poisson’s ratio, they referred to a private communication from Ledbetter (1996) to assert that \(\nu =0.36\). Accordingly, in our simulations, we make use of the Lamé constants
and
Strength In order to measure the uniaxial tensile strength of their PMMA, Dunn et al. (1997) also carried out three-point bending of beams without notches. Those indicated that \(\sigma _{\texttt {ts}}=124\pm 20\) MPa. They did not report any other strength data. In our simulations, we take the strength of their PMMA to be characterized by the Drucker–Prager strength surface (10) with
where, for the same reasons invoked in the preceding section, we have set the uniaxial compressive strength \(\sigma _{\texttt {cs}}\) to be twice as large as the tensile strength \(\sigma _{\texttt {ts}}\).
Remark 10
Dunn et al. (1997) mentioned that the machining of the notches was done carefully and that optical microscopy revealed no evidence of crazing ahead of the machined notch tips. In our simulations, we therefore assume that the strength surface (10) with (18) applies to the entirety of the specimens, the bulk as well as the boundaries, including the (macroscopically) sharp notch tip. Furthermore, exactly as in the two sets of preceding comparisons, we also adopt here the idealization that the strength material constants (18) are deterministic and not stochastic.
Critical energy release rate Using cracked three-point bending specimens with the same dimensions depicted in Fig. 11, Dunn et al. (1997) also measured the critical energy release rate of their PMMA to be \(G_c=394\pm 90\, \mathrm{N/m}\). In our simulations we use the value
As for the remainder of parameters entering the simulations, we make use of the localization length \(\varepsilon =12.5\) \(\mu \)m, which is sufficiently small for this problem. For such a localization length and the above-calibrated material parameters, the coefficient \(\delta ^\varepsilon \) in the external driving force takes the value \(\delta ^\varepsilon =0.6\). The size of the regularized cracks is hence given by \(\varepsilon ^\star =\varepsilon /\sqrt{1+\delta ^\varepsilon }\approx 9.9\) \(\mu \)m. We carry out the simulations under plane-strain conditions in an unstructured mesh of size \(h=2\) \(\mu \)m \(\approx \varepsilon ^\star /5\) around and ahead of the V-notch, where the cracks are expected to nucleate and propagate. The plane-strain idealization, as it was the case for the U-notched specimens considered above, was checked to be sufficiently accurate via direct comparisons with 3D simulations.

Contour plots of the phase field v predicted by the theory in the V-notched beam with notch depth \(A=3.56\) mm and notch angle \(\gamma =90^{\circ }\) at two applied displacements u; the plots are shown only in a region near the notch. Part a shows the instance at which fracture nucleates on the tip of the notch, while part b shows the instance at which the specimen is all but severed into two pieces
6.2 Theory vs. experiments
Dunn et al. (1997) indicated that all their specimens showed a linear force-displacement (P versus u) response followed by complete rupture into two symmetric pieces. Upon inspection of the mirror-like smooth fractured surfaces of the post-mortem specimens, they concluded that fracture nucleated at the notch tip and rapidly propagated along the center plane of the specimens, this irrespective of the depth and angle of the notch. All the simulations are in accordance with these observations. For illustration purposes, Figs. 12a and b show representative snapshots of the phase field v predicted by the theory for the case of the V-notched beam with notch depth \(A=3.56\) mm and notch angle \(\gamma =90^{\circ }\) just after nucleation and just before complete rupture.

Comparison between the predictions of the phase-field theory and the experiments of Dunn et al. (1997) on PMMA. The critical forces \(P_{cr}\) at which fracture nucleates in specimens with notch angles a \(\gamma =60^{\circ }\), b \(\gamma =90^{\circ }\), and c \(\gamma =120^{\circ }\), as functions of the normalized notch depth A/H
Figure 13 presents comparisons between the predictions generated by the theory and the measurements of Dunn et al. (1997) for the critical forces \(P_{cr}\) at which fracture nucleated. The results are shown as a function of the notch depth A, normalized by the height \(H=17.8\) mm of the specimens, for the three notch angles \(\gamma =60^{\circ }\), \(90^{\circ }\), and \(120^{\circ }\) that they investigated. In addition to the good agreement between the theory and the experiments, these comparisons show, as expected, that fracture nucleation transitions from being governed by the Griffith competition between bulk elastic energy and surface fracture energy to being governed by the strength of the material as the notch angle \(\gamma \) increases.
7 Final comments
Adding to the validation results presented in the companion papers Kumar et al. (2018a, 2018b, 2020) and Kumar and Lopez-Pamies (2021), where the theory is confronted to experiments of fracture nucleation and propagation in silicone elastomers, titania, graphite, polyurethane, PMMA, alumina, and natural rubber spanning a broad spectrum of specimen geometries and loading conditions, the three sets of comparisons with experiments on glass and PMMA presented in this work provide further evidence and motivation to continue investigating the phase-field theory (4)–(5) as a complete framework for the description of fracture nucleation and propagation in elastic brittle materials at large.
The results presented in this work have also made it plain that more experiments are pressingly needed to measure the strength surface of materials beyond the two standard points of uniaxial tensile and compressive strength. Indeed, fracture nucleation occurs more often than not in regions where the state of stress is fully triaxial. Any hope of being able to accurately predict fracture nucleation under general loading conditions appears then to hinge on having a more complete experimental knowledge of the strength surface of the materials at hand.
Notes
By strength we refer to the general definition of strength introduced by Kumar et al. (2020), which we recall here for the reader’s convenience. When any piece of the elastic brittle material of interest is subjected to a state of monotonically increasing uniform but otherwise arbitrary stress, fracture will nucleate from one or more of its inherent defects at a critical value of the applied stress. The set of all such critical stresses defines a surface in stress space. In terms of the Cauchy stress tensor \(\varvec{\sigma }\), we write \({\mathcal {F}}(\varvec{\sigma })=0\). This definition generalizes the various notions of ‘tensile’ and ‘shear’ strength that were proposed on the heels of the introduction of the stress tensor (Cauchy 1823)by numerous pioneers of continuum mechanics including Lamé, Clapeyron, Tresca, and Mohr; see, e.g., the historical account on rupture of solids in the classic monograph by Love (Love 1906; Section 83). We also note that it has long been recognized that a Griffith criterion alone cannot predict nucleation in general. Attempts to model nucleation of fracture near a notch front in terms of a “tensile” strength at a critical distance from the front combined with a critical energy release rate can be found, for instance, in (Leguillon 2002).
“Large” refers to large relative to the characteristic size of the underlying heterogeneities in the material under investigation. By the same token, “small” refers to sizes that are of the same order or just moderately larger than the sizes of the heterogeneities.
References
Aranda-Ruiz J, Ravi-Chandar K, Loya JA (2020) On the double transition in the failure mode of polycarbonate. Mech Mater 140:103242
Bourdin B, Francfort GA, Marigo JJ (2000) Numerical experiments in revisited brittle fracture. J Mech Phys Solids 48:797–826
Bower AF, Ortiz M (1991) A three-dimensional analysis of crack trapping and bridging by tough particles. J Mech Phys Solids 39:815–858
Bresler B, Pister KS (1958) Strength of concrete under combined stresses. ACI J Proc 55:321–345
Cauchy AL (1823) Recherches sur l’équilibre et le mouvement intérieur des corps solides ou fluides, élastiques ou non élastiques. [Researche on the equilibrium and internal motion of solid or fluid bodies, elastic or not elastic] Bulletin de la Société Philomatique, pp 300–304
Christensen RM, Freeman DC, DeTeresa SJ (2002) Failure criteria for isotropic materials, applications to low-density types. Int J Solids Str 39:973–982
Cox B, Yang Q (2006) In quest of virtual tests for structural composites. Science 314:1102–1107
Drucker DC, Prager W (1952) Soil mechanics and plastic analysis for limit design. Q Appl Math 10:157–165
Drugan WJ, Willis JR (1996) A micromechanics-based nonlocal constitutive equation and estimates of representative volume element size for elastic composites. J Mech Phys Solids 44:497–524
Dunn ML, Suwito W, Cunningham S (1997) Fracture initiation at sharp notches: correlation using critical stress intensities. Int J Solids Struct 34:3873–3883
Fischer-Cripps A (2007) Introduction to contact mechanics. Springer, New York
Francfort GA, Marigo JJ (1998) Revisiting brittle fracture as an energy minimization problem. J Mech Phys Solids 46:1319–1342
Francfort GA, Giacomini A, Lopez-Pamies O (2019) Fracture with healing: a first step towards a new view of cavitation. Anal PDE 12:417–447
Gao H, Rice JR (1989) A first-order perturbation analysis of crack trapping by arrays of obstacles. J Appl Mech 56:828–836
Gómez FJ, Elices M, Planas J (2005) The cohesive crack concept: applications to PMMA at \(-60\)\(^{\circ }\)C. Eng. Frac. Mech. 72:1268–1285
Griffith AA (1921) The phenomena of rupture and flow in solids. Philos Trans R Soc Lond A 221:163–198
Guin JP, Gueguen Y (2019) Mechanical properties of glass. In: Musgraves JD, Hu J, Calvez L (eds) Springer handbook of glass. Springer, Berlin
Hertz H (1882) On the contact of rigid elastic solids and on hardness. Verh. Ver. Beförderung Gewerbefleisses 61:410–430
Hossain MZ, Bourdin B, Bhattacharya K, Hsueh C-J (2014) Effective toughness of heterogeneous media. J Mech Phys Solids 71:320–348
Hsueh C-J, Bhattacharya K (2016) Homogenization and path independence of the J-integral in heterogeneous materials. J Appl Mech 83:101012
Kumar A, Francfort GA, Lopez-Pamies O (2018) Fracture and healing of elastomers: a phase-transition theory and numerical implementation. J Mech Phys Solids 112:523–551
Kumar A, Ravi-Chandar K, Lopez-Pamies O (2018) The configurational-forces view of fracture and healing in elastomers as a phase transition. Int J Fract 213:1–16
Kumar A, Lopez-Pamies O (2020) The phase-field approach to self-healable fracture of elastomers: a model accounting for fracture nucleation at large, with application to a class of conspicuous experiments. Theoret Appl Fract Mech 107:102550
Kumar A, Bourdin B, Francfort GA, Lopez-Pamies O (2020) Revisiting nucleation in the phase-field approach to brittle fracture. J Mech Phys Solids 142:104027
Kumar A, Lopez-Pamies O (2021) The poker-chip experiments of Gent and Lindley (1959) explained. J Mech Phys Solids 150:104359
Lawn BR (1998) Indentation of ceramics with spheres: a century after Hertz. J Am Ceram Soc 81:1977–1994
Leguillon D (2002) Strength or toughness? a criterion for crack onset at a notch. Euro J Mech A/Solids 21:61–72
Love AEH (1906) A treatise on the mathematical theory of elasticity. Cambridge University Press, Cambridge
Michel JC, Suquet P (2022) Merits and limits of a variational definition of the effective toughness of heterogeneous materials. J Mech Phys Solids 164:104889
Mouginot R, Maugis D (1985) Fracture indentation beneath flat and spherical punches. J. Mater. Sci. 20:4354–4376
Munz D, Fett T (1999) Ceramics: mechanical properties, failure behaviour, materials selection. Springer, New York
Rankine WJM (1857) On the stability of loose earth. Philos Trans R Soc Lond 147:9–27
Schneider M (2020) An FFT-based method for computing weighted minimal surfaces in microstructures with applications to the computational homogenization of brittle fracture. Int J Numeri Methods Eng 121:1367–1387
Strobl M, Seelig T (2020) Phase field modeling of Hertzian indentation fracture. J Mech Phys Solids 143:104026
Willam KJ, Warnke EP (1975) Constitutive models for the triaxial behavior of concrete. Proc Int Assoc Bridge Struct Eng 19:1–30
Zehnder AT (2012) Fracture mechanics. Springer, New York
Acknowledgements
Support for this work by the National Science Foundation through the grant CMMI–2132528 and the collaborative Grants CMMI–1901583 and CMMI–1900191 is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: sample results showcasing the independence of the phase-field theory (4)–(5) on the localization length \(\varepsilon \)
Appendix: sample results showcasing the independence of the phase-field theory (4)–(5) on the localization length \(\varepsilon \)
In this appendix, as a complement to the results reported in Section 4.3 in (Kumar et al. 2020), we report sample results for each of the three classes of boundary-value problems investigated in the main body of the text that showcase the independence of the phase-field theory (4)–(5) on the localization length \(\varepsilon \).

Contour plot of the phase field v predicted by the phase-field theory (4)–(5) for one of the indentation experiments of Mouginot and Maugis (1985). Part a reproduces the result in Fig. 4a for localization length (13), while part b shows the corresponding result for the different localization length (20)
Figure 14 provides a comparison between the result presented in Fig. 4a for the phase field v predicted by the theory for localization length (13) and that obtained for the different localization length
The calibration of the coefficient \(\delta ^\varepsilon \) for the values (20) renders \(\delta ^\varepsilon =60\) and \(\delta ^\varepsilon =6\), respectively, which result in an actual regularized size of the cracks given by \(\varepsilon ^\star =\varepsilon /\sqrt{1+\delta ^\varepsilon }=1.9\) \(\mu \)m. This is about three times smaller than the size of the cracks obtained for the localization length (13). Yet, it is evident that the results in Figs. 14a and b are essentially the same.
Next, Fig. 15 presents a comparison between the critical force \(P_{cr}\) in Fig. 9 predicted by the theory for notch depth \(A=5\) mm when using a localization length \(\varepsilon =12.5\) \(\mu \)m (solid line) and the corresponding result (dashed line) when using the smaller localization length \(\varepsilon =5\) \(\mu \)m. In the latter case, the calibrated value of the coefficient \(\delta ^\varepsilon \) turns out to be \(\delta ^\varepsilon =1.15\), which results in a regularized crack size of \(\varepsilon ^\star =\varepsilon /\sqrt{1+\delta ^\varepsilon }=3.4\) \(\mu \)m. This is about two times smaller than the regularized crack size that ensues from \(\varepsilon =12.5\) \(\mu \)m. Clearly, the results in Fig. 15 for the two different localization lengths are largely similar to one another.

Critical force \(P_{cr}\) predicted by the phase-field theory (4)–(5) for one of the U-notched beam experiments of Gómez et al. (2005). The solid line reproduces the result for notch depth \(A=5\) mm in Fig. 9 for localization length \(\varepsilon =12.5\) \(\mu \)m, while the dashed line corresponds to the result for localization length \(\varepsilon =5\) \(\mu \)m

Critical force \(P_{cr}\) predicted by the phase-field theory (4)–(5) for one of the V-notched beam experiments of Dunn et al. (1997). The solid line reproduces the result for notch angle \(\gamma =90^{\circ }\) in Fig. 13b for localization length \(\varepsilon =12.5\) \(\mu \)m, while the dashed line corresponds to the result for localization length \(\varepsilon =9\) \(\mu \)m
Finally, Fig. 16 presents a comparison between the critical force \(P_{cr}\) in Fig. 13b predicted by the theory for notch angle \(\gamma =90^{\circ }\) when using a localization length \(\varepsilon =12.5\) \(\mu \)m (solid line) and the corresponding result (dashed line) when using the smaller localization length \(\varepsilon =9\) \(\mu \)m. The calibrated value of the coefficient \(\delta ^\varepsilon \) for the latter case is \(\delta ^\varepsilon =35\), which results in a regularized crack size \(\varepsilon ^\star =\varepsilon /\sqrt{1+\delta ^\varepsilon }=1.5\) \(\mu \)m that is about six times smaller than the regularized crack size that is obtained for \(\varepsilon =12.5\) \(\mu \)m. Consistent with the two preceding comparisons, a quick glance at Fig. 16 suffices to recognize that the two theoretical predictions based on different localization lengths are practically the same.
Rights and permissions
About this article

Cite this article
Kumar, A., Ravi-Chandar, K. & Lopez-Pamies, O. The revisited phase-field approach to brittle fracture: application to indentation and notch problems. Int J Fract 237, 83–100 (2022). https://doi.org/10.1007/s10704-022-00653-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10704-022-00653-z