
Abstract
A cornerstone of physics, Maxwell‘s theory of electromagnetism, apparently contains a fatal flaw. The standard expressions for the electromagnetic field energy and the self-mass of an electron of finite extension do not obey Einstein‘s famous equation, \(E=mc^2\), but instead fulfill this relation with a factor 4/3 on the left-hand side. Furthermore, the energy and momentum of the electromagnetic field associated with the charge fail to transform as a four-vector. Many famous physicists have contributed to the debate of this so-called 4/3-problem without arriving at a complete solution. It has generally been assumed that, as originally suggested by Poincaré, the problems are connected to the question of stability of the charge distribution, and that relativistic equivalence between energy and self-mass can only be restored by inclusion of stabilizing forces. Alternative solutions to the problems have also been proposed. Nearly a century ago Fermi suggested a covariant definition of the electromagnetic energy and momentum, and sixty years later Kalckar et al. argued that the 4/3 problem is caused by omission of a relativistic correction in the standard evaluation of the self-force from Coulomb self-interaction. However, the relation between these suggestions has not been clear. We show that the relativistic correction implies that the mechanical momentum of an accelerated rigid body must be defined as the sum of the momenta of its parts for fixed time in the momentary rest frame of the body. For the total momentum of particles and field to be conserved, the total energy–momentum tensor must be divergence free, and this then requires that the momentum of the associated electromagnetic field be defined in the same way, consistent with the suggestion by Fermi. This comprehensive solution of the 4/3-problem demonstrates that there is no conflict of Maxwell‘s theory with special relativity and the questions of equivalence of electromagnetic energy and self-mass and of stability of a classical charge distribution are independent. In appendices we discuss the relations of our treatment with Fermi‘s seminal paper and with a classic paper by Dirac where he evaluated the damping self-force on a point electron from transport of energy and momentum in the electromagnetic field.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In classical electrodynamics an accelerated charge gives rise to electromagnetic radiation and also to a field that reacts back on the charge with a so-called self-force. This force can be divided into components that are even and odd, respectively, under time reversal and the rate of work done by these force components changes sign or is invariant, respectively, under time reversal. The former provides an inertial force resisting acceleration and the latter accounts for energy loss to radiation. In addition, this odd component of the self-force includes a term that induces reversible energy exchange with the near field, the so-called acceleration energy or Schott term [1], p. 253], [2]. Apart from the presence of this term, the above distinction is analogous to that between reactive and resistive impedance in an electronic circuit [3].
Here our focus is on the inertial self-force, characterized by an electromagnetic mass. According to the theory of special relativity its electromagnetic mass should be given by
where \(U_{el}\) is the electromagnetic self-energy in the electron’s rest frame,
where \(\rho (\mathbf{r})\) describes the charge distribution of the electron and c is the velocity of light in vacuum.
As we shall show below, a standard calculation of the total self-force in the rest frame of an electron, based on Maxwell’s equations, leads to
where \(\mathbf {v}\) is the velocity, differentiation with respect to time is indicated by a dot, and \(m_e\) is given by Eq. (1). When the first, inertial term in Eq. (3) is moved to the left hand side of the equation of motion, \(M {\dot{\mathbf{v}}} = \mathbf{K}\), where \(\mathbf{K}\) includes an external force, \(\mathbf{K} = \mathbf{K}_{ext} + \mathbf{K}_{self}\), 4/3 \(m_e\) can be interpreted as a correction to the mechanical mass M and the unexpected factor 4/3 is referred to as “the 4/3-problem”. In spite of its century-long history this problem is still discussed in the literature as one that is not fully resolved (see, for example, Chap. 16 in [4]). Also the form of the second term is unexpected because the power of the emitted radiation is proportional to the square of the acceleration according to the Larmor formula. The reason is the presence of the much debated Schott term mentioned above [5, 6].
The seriousness of the 4/3-problem is emphasized by Feynman in his famous Lectures on Physics [7], Chap. 28]. After the discussion of special relativity and Maxwell’s theory of electromagnetism he writes: “But we want to stop for a moment to show you that this tremendous edifice, which is such a beautiful success in explaining so many phenomena, ultimately falls on its face. There are difficulties associated with the ideas of Maxwell’s theory which are not solved by and not directly associated with quantum mechanics.” Also, it turns out that solution of problems in quantum electrodynamics can often be reduced to the solution of the corresponding classical problem [8,9,10].
In the textbook by Jackson [4] which is a standard reference in the literature [10] it is argued that this violation of equivalence between mass and energy of an electron is a consequence of the fact that the electromagnetic contributions to the energy and momentum do not transform properly (as a four-vector) but that the problem can be removed by inclusion of non-electromagnetic forces (Poincaré stresses) required to stabilize the charge [11]. This inclusion gives a total divergence-free energy–momentum tensor (named ‘the stress tensor’ in [4]) and hence the correct energy–momentum transformation properties. Such a model proposed by Schwinger [12] is discussed by Jackson in [4], §16.6] (see also [13]). We discuss the energy–momentum tensor in Sect. 5. A shell model of the electron as spherical insulator with a surface charge has been considered in detail by Yaghjian [14] who introduced a negative ‘bare mass’ which reduces the factor 4/3 in Eq. (3) to unity. In an interesting historical account of the development of electrodynamics [15], Spohn refers to Schwinger, Yaghjian and Rohrlich for discussions of the 4/3-problem.
At the end of the last century Rohrlich described the state of the problem under discussion optimistically: “Returning to the overview of classical charged particle dynamics, one can summarize the present situation as very satisfactory: for a charged sphere there now exist equations of motion, both relativistic and nonrelativistic, that make sense and that are free of the problems that have plagued the theory for most of this century” [16] (see also the textbook [17]). However, the authors Kalckar, Lindhard and Ulfbeck (KLU) of the paper [18], which unfortunately has gone unnoticed by the general physics community and apparently was not known to Rohrlich, did not share this opinion. They stated that “there is a crucial error in the usual derivations of self-force” and found that, after correction of this error, there is complete equivalence between the field energy and the self-mass of an electron and hence no need to introduce Poincaré stresses. This conclusion was derived from a comprehensive study of the acceleration of a rigid system of charges. Previously overlooked relativistic corrections associated with Lorentz contraction of a rigid body and time dilation in an accelerated system turn out to be important even in the limit of velocities much smaller than c.
In the following we shall show how the 4/3-problem can be resolved. First we calculate the total self-force in the standard way from the interaction between the elements of charge in a classical model of the electron.This leads to a formula for the inertial self-force and the associated electromagnetic mass with the troublesome factor 4/3. However, when relativistic effects are included [18] the 4/3-factor disappears. The key observation is that, owing to Lorentz contraction, different parts of a rigid body must have different accelerations to preserve rigidity and the time intervals required to reach a new velocity are therefore different. This modifies the way forces on different parts of the body should be added. We then demonstrate equivalence from a calculation of the self-force from transport of field momentum across the surface of a sphere surrounding the electron, including a similar relativistic correction. Dirac applied this type of calculation to a point electron in his famous 1938-paper [2] but to avoid the problem of infinite self-energy he omitted the reactive term in the self-force.
As an alternative to inclusion of Poincaré stresses Rohrlich suggested a new definition of the energy–momentum vector of the electromagnetic field around a moving electron, [17], Chap. 4], as discussed also in Jackson’s textbook, [4], Chap. 16]. Similar solutions were suggested by Fermi already in 1922 [19] and by Wilson [20] and Kwal [21]. However, the root of the problem with the standard definition remained elusive and introduction of Poincaré stresses was considered an alternative option. In Sect. 5 we discuss this (covariant) definition on the basis of the general formalism of the classical theory of fields in Landau and Lifshitz’ textbook, [22]. The papers by Fermi and Dirac are discussed in Appendices C and D.
2 Retarded Electromagnetic Fields Around an Electron and the 4/3-Problem
The Maxwell equations for the electric field generated by a moving electron have two solutions, the retarded field, \(\mathbf{E}_{ret}\), and the advanced field, \(\mathbf{E}_{adv}\), with boundary conditions in the past and in the future, respectively. Normally, only the retarded solution (Liénard–Wiechert field) is considered to have a physical meaning but the advanced field can sometimes be useful because it is connected to the retarded field by time reversal.
Dirac [2] and Schwinger [3] were both only interested in calculating the resistive component of the self-force which is associated with the component of the retarded field that is odd under time reversal. Schwinger therefore separated the components of the field that are odd and even under time reversal,
keeping only the first term. To avoid the problem of infinite self-energy for a point electron, also Dirac retained only the contribution to the self-force from the first term in Eq. (4). We shall be interested in the total self-force and hence postpone the separation in Eq. (4). The rate at which the electron performs work on the electric field is
where \(\mathbf{j}\) is the current density created by the electron and the integration extends over the whole coordinate space. This rate is seen to be invariant under time reversal for the first field component in Eq. (4) and to change sign for the second component.
2.1 Expansion of Electromagnetic Fields Near an Accelerated Charge
As shown in Appendix A, the retarded electromagnetic fields in the vicinity of a point charge q are to second order in the distance \(\varepsilon \) from the charge given by
The velocity of the charge is here assumed to be zero at the time t of observation, \(c \beta (t)=0\), and derivatives with respect to t are indicated by dots. The unit vector \(\mathbf{n}\) points from the position of the charge at time t towards the point of observation. Note that to second order in \(\varepsilon \) the magnetic field does not depend on distance. The expressions for the advanced fields \(\mathbf{E}_{adv}\) and \(\mathbf{H}_{adv}\) can be obtained from Eqs. (6), (7) by the substitution \(\ddot{{\pmb \beta }} \rightarrow - \ddot{{\pmb \beta }}\).
In Eq. (6) only the term proportional to \(\ddot{{\pmb \beta }}\) is odd under time reversal and hence the first term in Eq. (4) has a finite value at the location of the charge,
and this field multiplied by q gives a damping force, \(\mathbf{K}_{damp}\), accounting for irreversible energy loss but also for reversible energy exchange with the near field (Schott term),
Upon integration over time, the first term vanishes for periodic motion or for initial and final states without acceleration while the second term gives a radiation damping in accordance with the Larmor formula for the radiation intensity. In contrast to [2], our aim is to study not the radiative friction but the electromagnetic self-energy and self-mass of the electron. For this purpose only the first two terms in Eq. (6) are needed.
2.2 The 4/3-Problem for Electron Field Momentum and Self-Force
Consider the Abraham–Lorentz classical model of an electron as a stable spherical shell with radius R, on which a total charge q is uniformly distributed [23, 24]. In an inertial frame K the shell moves with velocity \(\mathbf {v}\). According to standard results, the density of momentum of an electromagnetic field equals \(\mathbf{S}/c^2\), where \( \mathbf{S} = c \mathbf{E} \times \mathbf{H}/(4\pi )\) is the Poynting vector. Introducing the field belonging to the shell, as observed in the frame K, and integrating over all space one finds a momentum [4, 7],
where \(\gamma = (1 - \beta ^2)^{-1/2}\). In the rest frame, \(K'\), the momentum is \(\mathbf{P'}^{(f)} = 0 \) and the energy \(E'^{(f)} = q^2/2R\) (see Eq. (14)), and a Lorentz transformation of this energy–momentum gives Eq. (10) for the momentum without the factor 4/3. Thus, due to this offending factor, the energy–momentum fails to transform as a four-vector.
An alternative, more direct way to see the lack of equivalence between electromagnetic self-energy and self-mass is through a calculation of the electromagnetic self-force of an accelerated charge. Following Heitler [25], §4], we consider two charge elements, dq and \(dq'\), on the spherical shell, separated by the distance \(\varepsilon \). The charge element dq produces an electric field acting on the charge \(dq'\) with the force \(dq' d\mathbf{E}_{ret}\), where the field is obtained from Eq. (6) with q replaced by dq. The total force acting on the electron itself is then equal to
Since the unit vector \(\mathbf{n} \) in the expression (6), pointing from the charge element dq towards \(dq'\), is uniformly distributed over solid angles for fixed \(\varepsilon \), we obtain the following expression for the self-force [25]:
where we have omitted odd power terms with respect to the vector \(\mathbf{n}\) in Eq. (6) because they vanish after the integration over solid angles \(d \Omega \).
Since for an arbitrary constant vector \(\mathbf{a}\) we have
we obtain Eq. (3) for the electromagnetic self-force of an electron, where
is the electromagnetic mass of an electron corresponding to the self-energy in Eq. (2). The last expression in Eq. (14) is most easily obtained from the capacitor formula, \(U = (1/2) q V\). The second term on the right hand side of Eq. (3), obtained from the last term in Eq. (12), gives the expression in Eq. (8) for the damping force.
Thus, we see that the factor 4 / 3 appears in the equation of motion, violating the equivalence between electromagnetic mass and self-energy. However, the calculation above rests on the assumption that at a given instant all parts of the electron have the same acceleration in a reference frame in which they are all at rest simultaneously. As we shall discuss below, this was the assumption challenged by Kalckar, Lindhard and Ulfbeck in [18].
3 Acceleration of Rigid Body and the KLU Solution
We define the classical electron as a rigid sphere (or spherical shell) with small but finite extension and total charge q with a spherically symmetric distribution. We shall now show that the equivalence between electromagnetic energy and mass is restored if a proper relativistic treatment of the acceleration of a rigid body is introduced. As it turns out, this breaks the spherical symmetry which eliminates the contribution to the self-force from the dominant Coulomb term in Eq. (6).
3.1 Relativistic Description of Accelerated Rigid Body
Suppose that at each stage of the motion of the electron there is an inertial frame of reference in which the velocities of all the components of the electron vanish simultaneously and that all distances between them remain unchanged in this electron rest frame while the electron moves in an arbitrary manner in the laboratory frame K [18]. This corresponds to the relativistic definition of translational motion of a rigid body, introduced by Born [26].
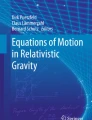
For simplicity we consider one-dimensional motion of two point-like particles. The motion occurs in such a way that the distance between them, \(l_0\), remains constant in the common rest frame \( K '\) (see Fig. 1). This uniquely determines the coordinates of particle 2 as functions of the coordinates of particle 1. Let \((x_1, t_1)\), \((x_2, t_2)\) and \((x_1', t_1')\), \((x_2', t_2')\) be the coordinates of the two particles in reference frames K and \(K'\), respectively. The times \(t_1'\) and \(t_2'\) are equal and therefore the Lorentz transformation from K to \(K' \) yields the relation
where \(c\beta = c\beta _1 (t_1) = c\beta _2 (t_2) \) is the relative velocity of the frames K and \(K'\). On the other hand, the transformation from \(K'\) to K leads to the relation

Minkowski space-time diagram showing the motion of particles 1 and 2 in which the distance between them remains constant in the common rest frame. Both particles start out at \(t=0\) with velocity zero in the laboratory system. At the event points \((x_1, t_1)\) and \((x_2, t_2)\) the velocities are equal, \(\beta \equiv \beta _1 (t_1) =\beta _2 (t_2)\), and the two events are simultaneous in the moving rest frame (primed axes). The dashed line indicates a branch of the light cone for the event at \((x_1, t_1)\)
Formulas (15) and (16) lead to the definition of a system with rigid acceleration:
where \(l_0 = x_2' - x_1'\) is the distance between the particles in the rest frame.
If the velocity is not parallel to the separation \(l_0\) between the particles, the product \(l_0 \beta (t_1)\) in Eq. (18) is replaced by the product of vectors \(\mathbf{l}_0 \cdot {\pmb \beta }(t_1)\). Below we focus as in Sect. 2 on the limit of low (non-relativistic) velocities and set \(\beta =0\) corresponding to \(t_1 = t_2 = 0\) in Fig. 1. This leads to the relation
We conclude that in the common rest frame for a system of many particles the acceleration of a particle with coordinates \(\mathbf{r}_i\) relative to a reference particle must be given by
where \(\mathbf{g}_0\) is the acceleration of the reference particle. The choice of this particle is immaterial because Eq. (20) satisfies the reciprocity relation
3.2 Self-forces and Self-mass of Accelerated Electron
Kalckar, Lindhard and Ulfbeck calculated the electromagnetic self-force and mass of the extended electron treating it as a system with rigid acceleration [18]. Their crucial insight was that for a rigid body there is not a simple relation between the acceleration and the total force. Consider a system of particles initially at rest and accelerated as a rigid system with force \(\mathbf{K}_i\) on the \(i'\)th particle with mass \(m_i\) and acceleration \(\mathbf{g}_i\). The (non-relativistic) equation of motion for this particle is then
The total mass is \(M=\sum _i m_i\) and according to the relation (20) for a rigid body we obtain
where as before \(\mathbf{g}_0\) is the acceleration of a reference particle at \(\mathbf{r} = 0\). In a description of the translational motion of the rigid body as the motion of a point particle with mass M the force is hence given by the right-hand side of Eq. (23) and not by the simple sum of the forces on the parts of the body.
In the formula (12) for the self-force the correction factor in Eq. (23) is only important for the omitted Coulomb term in Eq. (6). This term now gives a contribution,
Using the symmetry between the variables q and \(q'\) we can rewrite this integral as
The correction (24) is then seen to cancel the first term in the formula (12) and hence eliminates the factor 4/3 in Eq. (13). The self-force in the equation of motion now has the form in Eq. (3) but without the factor 4/3, in agreement with mass-energy equivalence.
A particularly simple example demonstrating equivalence and irrelevance of Poincaré forces is discussed in [18]. Consider two particles, both with charge q and mechanical mass m, accelerated by a force on particle 1 in the direction towards particle 2 with a strength adjusted to keep the distance R between them constant in their mutual momentary rest frame. A calculation of the self-force analogous to Eq. (12) for spherical geometry gives a self-mass equal to the result expected from equivalence (Eq. (14)) multiplied by a factor two. However, with the correction in Eq. (23) this factor is reduced to unity. Obviously, there is in this example no room for introduction of Poincaré forces (see also [27, 28]).
3.3 Addition of Forces and Simultaneity
The modification in Eq. (23) of the relation between forces and mass for a rigid body may look very odd but the modification has a simple interpretation. When a rigid body originally at rest is accelerated during a time interval \(dt_0\) for the reference point, other points on the body are accelerated through different time intervals, as expressed by Eq. (19) and illustrated in Fig. 1. For the change of the momentum of the rigid body, defined as the sum of the momenta of its parts for fixed time in the momentary rest frame, we therefore obtain
in agreement with the relation (23). As stressed in [18], it is important that this relation is not based on any new definition but follows directly from Born’s definition of a rigid body and the point dynamics of its parts. We may therefore instead regard the combination of Eqs. (23) and (26) as demanding the definition of the momentum given above Eq. (26) in a description of the rigid-body motion as that of point particle with the total mass M of the body, \(M=\sum _i m_i\). Surprisingly, this interpretation of Eq. (23) was not given by KLU in [18].
Alternatively, we can describe the acceleration process in the accelerated reference system following the motion of the body. Here the time differences are ascribed to different rates of clocks at different positions, i.e., to time dilation in a gravitational field. In [18] such a reference system is called a Møller box, with reference to the book on relativity by Møller [29]. When a metric containing the spatial variation of the rate of clocks is introduced, the expression (26) becomes just the addition of forces on the body so the 4/3-problem disappears in a natural way. However, as noted in [18], the price to be paid for this simplification is a more complicated equation of motion (Eq. (A20) in [18]).
4 Equivalence from Exchange of Momentum with the Surrounding Field
An alternative to the calculation of self-forces is an analysis of the exchange of electromagnetic energy and momentum between the electron and the space outside. As we shall see, the 4/3-problem arises again but it can be resolved by application of a correction analogous to the KLU prescription in Eq. (23). As mentioned, Dirac developed a relativistic analysis of the energy–momentum exchange between a region around a point electron and its surroundings in a famous paper from 1938 (see Appendix D). This analysis contains a solution of the 4/3-problem equivalent to that in [18], discussed in Sect. 3. However, to avoid the problem of infinite self-energy (and self-mass) for a point electron Dirac retained only the resistive self-force, corresponding to the first part of the field in Eq. (4), and replaced the infinite self-mass by a finite value through a renormalization procedure.
4.1 Currents of Field Energy and Momentum and Conservation Laws
Consider an electron at rest at time t, represented by a spherical shell with radius R and total charge q. Electromagnetic energy and momentum balance within a spherical region of radius \(\varepsilon \) surrounding the electron is given by the equations
where \(W=(8\pi )^{-1}(\mathbf{E}^2+\mathbf{H}^2)\) is the density of electromagnetic energy, \(\mathbf{S} = (c/4\pi ) \mathbf{E} \times \mathbf{H}\) the Poynting vector, and \(\mathbf{j}\) the electric current density. The differential surface element \(d \mathbf{f}\) contains a surface normal \(\mathbf{n}\) pointing out of the sphere. The vectors \(\mathbf{P}^{(f)}\) and \(\mathbf{P}^{(p)}\) represent the field and particle momenta inside the sphere with radius \(\varepsilon \), where
The matrix \(\sigma _{mn}\) is the Maxwell stress tensor with indices referring to the coordinates x, y, z, (see Eq. (33.3) in [22])
where \(\delta _{mn}\) is the Kronecker symbol. We use Latin letters for indices running from 1 to 3 and the convention that an index appearing twice is to be summed over. The integration at the left hand side of Eq. (27) and in Eq. (29) extends over the volume of the sphere with radius \(\varepsilon \) while the integration at the right hand side of Eqs. (27) and (28) is over the surface of that sphere. With the chosen sign of the stress tensor in Eq. (30), the right hand side of Eq. (28) gives the momentum flux into the sphere.
According to Eqs. (6) and (7) the leading term of the Poynting vector in the vicinity of the electron is
i.e., it is inversely proportional to square of the distance \(\varepsilon \). For terms with a higher power of \(\varepsilon \) the integrals in both Eqs. (27) and (29) vanish in the limit \(\varepsilon \rightarrow 0\).
According to Eq. (31), the Poynting vector is perpendicular to the surface normal of the sphere with radius \(\varepsilon \) and hence the energy flux in Eq. (27) equals zero. The second term at the left hand side of Eq. (27) is also zero since \(\mathbf{j}=0\) in the rest system. The field energy contained in the volume is therefore constant,
and we may conclude that in its rest frame the electron does not emit energy but only momentum, in contrast to the conclusion in [22] based on the Larmor formula and the symmetry of the emitted radiation.
For \(\varepsilon \rightarrow R_{+}\), the derivative of the electromagnetic field momentum inside the sphere with radius \(\varepsilon \) tends to zero since the volume of this sphere approaches the volume inside the uniformly charged spherical shell where there is no field, \(\mathbf{E} =0\). This implies that, in this limit, the right hand side of Eq. (28) represents the rate of change of mechanical momentum, only, i.e. it represents the self-force,
From Eq. (30) we have
where we have introduced an index s on the surface normal and on the momentum flux at the surface of integration. The magnetic-field terms in Eq. (30) are of second order in \( \varepsilon \) after the integration (33) and can be ignored.
4.2 Self-force from Transport of Field Momentum
Here we treat the simple case with \(R\ll \varepsilon \), the point electron. As shown in Appendix B, the result applies for all \(\varepsilon > R\). With the approximation above the charge is located at the center of the sphere so the unit vector \(\mathbf{n}\) in Eq. (6) is equal to the surface normal \(\mathbf{n}_s\). Inserting the expression (6) for the electric field into Eq. (34) and keeping only terms of order \( \varepsilon ^{-2}\) or lower we obtain for the momentum flux into the sphere with radius \(\varepsilon \)
The first (Coulomb) term and the first three terms in the last parenthesis give no contribution to the integral in Eq. (33) owing to their odd symmetry under change of sign of \(\mathbf{n}_s\). Using the relation (13) we then obtain for the force on the system consisting of the charged sphere and the field inside the distance \(\varepsilon \)
This agrees with Eq. (3) with \(m_e\) given by Eq. (14), except for the replacement of R by \(\varepsilon \). This difference is consistent with the notion that the electromagnetic energy is located in the field with the density given below Eq. (28). The dominant term is the Coulomb field and the energy inside a spherical shell with volume \(4 \pi r^2 dr\) is proportional to \( r^{-2}\). The total field energy outside the distance \(\varepsilon \) is therefore proportional to \(\varepsilon ^{-1}\) and for \(\varepsilon =R\) it equals the energy \(q^2/2R\) of a uniformly charged sphere. The negative of the first term in Eq. (36) is the force required to give this field the acceleration \(c {\dot{{\pmb \beta }}}\) (apart from the troublesome factor 4/3 which we discuss below).
According to the KLU prescription, the factor 4/3 in this formula may be eliminated by introduction of the relativistic correction factor \((1+\mathbf{r}_i \cdot {\dot{{\pmb \beta }}} /c )\) in the sum over forces \(\mathbf{K}_i\) acting at \(\mathbf{r}_i\) on a rigid body with acceleration \(c {\dot{{\pmb \beta }}}\) at \(\mathbf{r} = 0\). We should include this factor in the integration since the sphere is defined in the electron’s rest frame and follows its motion as a rigid body. For the point electron the momentum flux is given by Eq. (35). The correction factor is only important for the Coulomb term and we obtain
With this correction to Eq. (36) we obtain full relativistic equivalence between mass and energy of the field outside the sphere with radius \(\varepsilon \). In the limit \(\varepsilon \rightarrow R\) we obtain equivalence between the total field energy and mass. The calculation gives a physical interpretation of the electron’s self-force as the drag by the inertial mass of the electromagnetic field.
5 Energy–Momentum Tensor
The KLU paper clearly identified the error in the standard calculation of the electromagnetic self-mass of an electron represented by a classical model of a rigid, charged spherical shell. However, it remains to be explained what exactly is wrong with the definition in Eq. (10) of the momentum of the field associated with the electron and with Eqs. (27), (28), expressing conservation of the total energy and momentum of particles and fields. Is the redefinition of the field momentum and energy suggested by Rohrlich correct and, if so, what is the justification? In this chapter we elucidate these questions based on the general discussion of field energy–momentum in [22], §32] and the application to the electromagnetic field in §33.
We shall use standard four-dimensional relativistic notation, with Greek indices running from 0 to 3 for four-vectors transforming like the time-space coordinates of an event, \(x^{\mu } = (ct, x, y, z)\). In addition to these (contravariant) vectors we introduce the corresponding vectors with opposite sign of the last three components, called covariant vectors and distinguished by lower indices, \(x_{\mu }\). The invariant scalar product of two four-vectors \(x^{\mu }\) and \(y^{\mu }\) can then be written as \(x^{\mu }y_{\mu }\) with the convention of summing over indices appearing twice. Tensors of rank two, \(A^{\mu \nu }\), transform like the product of the components of two four-vectors. As for four-vectors, the indices can be moved up or down with the convention that this changes the sign for the spatial indices 1,2,3 but not for the time index 0.
5.1 Electromagnetic Field Tensor
The electromagnetic potentials may be combined into a four vector \(A^{\mu } = (\varphi , \mathbf{A})\) and the sources of the fields into a four-current \(j^{\mu } = (c\rho , \mathbf{j})\). A compact representation of the fields is the electromagnetic field tensor defined by [22]
The tensor is antisymmetric in the indices \(\mu , \nu \). The time derivative of the kinetic energy and momentum of a particle with rest mass m and charge q, interacting with the fields through the Lorentz force, are then determined by the equation of motion,
where \(u^\mu =(\gamma , \gamma {\pmb \beta })\) is the four-velocity and \(ds=cdt/\gamma \).
Also the Maxwell equations for the fields can be written in a compact form. The equations without source terms can be expressed as the following relation for the field tensor,
and the equations relating the fields to the sources as the relation
5.2 Energy–Momentum Four-Vector of Field Around Moving Electron
The energy and momentum densities of the electromagnetic field may be expressed through an energy–momentum tensor (Eq. (32.15) in [22]),
Here W is the energy density, \(\mathbf{S}\) the Poynting vector, and \(\sigma _{mn}\) the Maxwell stress tensor, given explicitly in Eq. (30). The energy–momentum tensor may also be expressed in terms of the field tensor (Eq. (33.1) in [22])
where \( \delta _{\mu \nu }\) is the Kronecker symbol.
The energy and momentum of the field on a hyperplane in 4-dimensional space is then given by
where the differential is an element of the hyperplane, \(d\sigma \), multiplied by a time-like unit four-vector perpendicular to that plane and in the future light cone, \(dS_{\beta }=n_{\beta } d \sigma \). For the special case of a hyperplane defined by \(x^0 = const.\), corresponding to the 3-dimensional space in the laboratory frame K, we obtain the standard expression for the energy as an integral over space of the energy density W and of the momentum as an integral of the Poynting vector divided by \(c^2\). As discussed in Sect. 2 below Eq. (10) this expression for the energy–momentum of the field fails to transform as a four-vector.
On the other hand, with the choice \(n_\beta = u_\beta \) the hyperplane corresponds to the 3-dimensional space in the electron rest frame \(K'\) and Eq. (44) is Rohrlich’s alternative definition of the energy–momentum vector of the electromagnetic field associated with the electron. In the rest frame we have \(u_\beta = (1,0,0,0)\) and Rohrlich’s formula gives the same result as the standard one, discussed in Eq. (10) and below. However, since \(G^\alpha = T^{\alpha \beta } u_\beta \) is a four-vector and the surface element \(d\sigma \) in the rest frame is an invariant, the energy–momentum vector defined in Eq. (44) transforms as a four-vector and the 4/3-problem should disappear. As an illustration of the content of formula (44) we verify this by direct calculation.
In Eq. (44) the integration is over space in the rest frame \(K'\) while the energy–momentum tensor is defined in the laboratory, so we first express \(G^{\alpha }\) in the primed coordinates of the rest frame. We assume that the velocity \(c{\pmb \beta }\) is in the x-direction and obtain from the Lorentz transformation \(\mathbf{r}' = (x',y',z')=(\gamma (x-\beta ct),y,z)\). The electromagnetic field from a charge q in uniform motion is given by [22], Eq. (38.6)]
Expressed as a function of the coordinates in \( K'\) the electric field is given by
We then calculate the spatial part of \(G^\alpha \), \(\mathbf{G}=(G_x,G_y,G_z)\),
The field is zero inside the sphere with radius R and hence the field momentum is given by the integral
and the result is consistent with the relativistic relation between mass and energy in Eq. (14).
5.3 Mechanical Energy–Momentum Tensor
To justify the new definition of the field energy and momentum it is necessary to verify that it is consistent with the exchange of energy and momentum between particles and field, as determined by the Maxwell equations and the Lorentz force. For this purpose we introduce an analogous mechanical energy–momentum tensor for particles with rest-mass density
where \(\mathbf{r}_j \) is the position vector of the mass \(m_{j}\). The energy–momentum tensor becomes [22], Eq. (33.5)]
Applying Eq. (44) for the hyperplane with \(x^0 = const.\) we obtain the required result,
As discussed in Sect. 4, below Eq. (26), the momentum of a rigid body is the sum of the momenta of its parts for fixed time \(t'\) in the rest system \(K'\). This corresponds to integration in Eq. (44) over the hyperplane perpendicular to the velocity \(u^\beta \) of the rest frame of the body with \(d\sigma = d^3 \mathbf{r'}\), leading to
where the coordinates \(\mathbf{r'}_j\) indicate the positions of the mass elements \(m_j\) and \(u_j^\alpha = u^\alpha \) the velocities for fixed \(t'\). As in the calculation above of the field momentum, we assume that the velocity is in the x-direction and introduce the primed variables, \( \mathbf{r'} = \left( \gamma (x - c\beta t), y, z \right) \), in the \(\delta \)-function with the replacement \( \mathbf{r} \rightarrow \left( \frac{\textstyle { x'}}{ \textstyle { \gamma } } + c\beta t, y', z' \right) \). The positions of the mass elements move with the speed \(c\beta \) in the x-direction and the two terms proportional to t in the \(\delta \)-function cancel. The integration then gives a factor \(\gamma \) and we again obtain the result in Eq. (51) but with the velocities for fixed \(t'\) so that we obtain the simple relation for a point particle with velocity \(u^\alpha \)
where \(M=\sum _j m_j\) is the total rest mass of the body.
5.4 Conservation of Total Energy and Momentum of Particles and Fields
The change with time of the energy and momentum is related through Gauss’ theorem to the four-divergence of the energy–momentum tensor. For a system of charged particles interacting with the electromagnetic field the total energy–momentum tensor is the sum of the particle and field tensors, \({T^{\mu }}_{\nu } = {{T^{(p)}}^{\mu }}_{\nu } + {{T^{(f)}}^{\mu }}_{\nu }\). With both charges and fields in the volume, the particle and field tensors are not separately divergence free but, as demonstrated in [22], §33], the total energy–momentum tensor is,
To show this we differentiate Eq. (43) and obtain
We replace the last factor in the first term using the relation (40) and the second factor in the last term using the relation (41). This leads to
By renaming the indices one can easily verify that the third term cancels the first two. This leaves the result
Next we consider the energy–momentum tensor for the particles in Eq. (50). First we assume that all particles have the same velocity. The four-divergence of the tensor then becomes
If we replace \(\mu \) by a continuous rest-mass distribution the first term is proportional to the four-divergence of the mass current which is zero due to conservation of rest mass. In the second term, we introduce the equation of motion in Eq. (39) which for a continuous charge distribution \(\rho \) may be written as
If the particles, or mass elements, do not have the same velocity, as is the case for an accelerated rigid body viewed from the laboratory frame (Fig. 1), the result in Eq. (59) is obtained for each small mass element and added together they again give the negative of Eq. (57). Combining with Eq. (57) we obtain the desired result in Eq. (54).
Integration of Eq. (54) over a region of four-space, delimited by two hyperplanes with constant times t and \(t+dt\) and a spherical surface f, and application of Gauss’ theorem leads to Eqs. (27) and (28) which were the starting point for our calculations in Sect. 4. However, we can now also see the problem with these relations. The integrals for fixed times t and \(t+dt\) of the energy–momentum tensor for the particles, i.e. for the components of the rigid body, do not represent the energy and momentum we associate with the rigid body. If we want to represent the motion of the body as that of a point mass, these quantities should be calculated on hyperplanes corresponding to fixed times in the momentary rest frames of the rigid body. In order to apply Gauss’ theorem to Eq. (54) we must then also integrate the energy–momentum tensor of the field over a volume delimited by these hyperplanes.
The expression for the momentum four-vector in Eq. (44) with \(n_\beta = u_\beta \) is identical to the one suggested in [17] but the justification is different. The modification of the standard expression is imposed by the relativistic definition of a rigid body introduced by Born and corrected in [18]. For consistency of the description the same hyperplane must be chosen for definition of the energy and momentum of the field as for the rigid body. Thus the justification is not just a requirement of covariance and there is not the freedom of definition implied by Jackson [4], Chap. 16]. The field energy–momentum defined in Eq. (44) would be covariant with any choice of a fixed hyperplane for the integration. Furthermore, the introduction of Poincaré stresses to solve the 4/3-problem is not only unnecessary but is hiding the real origin of the problem.
6 Summary and Concluding Remarks
The linked problems in classical electrodynamics of the electromagnetic mass of an electron and the damping of its motion due to emission of radiation have a long and interesting history. Early work on a classical model of the electron, in particular by Abraham [23] and Lorentz [24], focused on the damping and led to the Abraham–Lorentz equation of motion, as discussed in [4], Chap. 16]. Calculation of the electromagnetic mass required a description of the motion of a rigid body, and Born is credited with being the first to formulate the relativistic concept of a rigid body in a series of papers published around 1910. In the description of the motion of a body by a bundle of trajectories in 4-dimensional space its shape in the momentary rest frame is determined as the cut of this bundle with a 3-dimensional hyperplane perpendicular to the four-velocity, and rigidity requires this shape to be conserved [26].
With this definition Born considered the Abraham–Lorentz model of an electron as a rigid, uniformly charged spherical shell and calculated the self-force and the corresponding electromagnetic mass as \(m=(4/3) U_{el}/c^2\), where \(U_{el}\) is the electrostatic energy, in violation of the principle of equivalence between mass and energy in the theory of special relativity, expressed in Einstein’s famous equation, \(E=mc^2\). The crucial mistake in this calculation was Born’s failure to realize the full consequences of relativity: “We will understand as the resulting force of a force field, the integral of the product of rest charge and rest force [field] over the rest shape of the electron” [26], Chap. 3, §11]. The problem with this seemingly innocuous definition was not realized at the time and instead a remedy was suggested by Poincaré [11]. In the Abraham–Lorentz model of the electron additional forces, so-called Poincaré stresses, are required for stability, and the combined contributions from these and the electromagnetic forces to the mass and energy of the electron could be in accordance with Einstein’s principle of equivalence [4], Chap. 16].
As shown by Kalckar, Lindhard and Ulfbeck [18] and discussed here in Sect. 3, the conflict with relativistic equivalence is resolved when the relativistic modification of Born’s definition of total force is taken into account. An alternative to a calculation of internal forces between charge elements is an evaluation of the energy–momentum transport through a surface surrounding the charged spherical shell. As demonstrated in Sect. 4, the result of this type of calculation is consistent with equivalence between energy and inertial mass of the field when the time differences in rigid acceleration of the field are taken into account. This was seen to hold not only for the total field outside the spherical charged shell but for the field outside a sphere with arbitrary radius. In this sense, we have demonstrated detailed equivalence between mass and energy for the electromagnetic field around an accelerated electron. The question of equivalence for an atomic system was discussed in [18] and it was shown that it is independent of whether a classical description is used or a quantal description like the Dirac equation.
Curiously, a solution of the 4/3-problem was suggested already around 1920 by Enrico Fermi [19], as we have discussed in Appendix C. This paper and other related early Fermi papers have recently been reviewed and extended by Jantzen and Ruffini [30]. Fermi did not clearly identify the problem with Born’s definition of total force on a rigid body, revealed in [18], but pointed in the right direction for solution of the 4/3-paradox. His suggestion was largely ignored and forgotten at the time but was taken up by Rohrlich [17], who suggested adoption of the new, covariant definition of field momentum derived by Fermi. This solution to the 4/3-problem was dismissed in the introduction to [18] with the comment: “Because of the complications, some authors have preferred to define an electromagnetic energy–momentum four-vector for the electron. This will hardly do, however. The basic classical case is not an electron, but a macroscopic system, for which one is not free to define the electromagnetic self-energy or self-momentum.” It must be demonstrated that the definition is consistent with the exchange of energy and momentum between the particles and fields. This we have done in Sect. 5.
Thus we have arrived at a comprehensive solution of the 4/3 paradox: in a description of the motion of a charged, rigid sphere by the dynamics of a point charge with the total mass of the body, the energy and momentum must be evaluated as a sum over the elements of the body for fixed time in its momentary rest frame. The factor 4/3 then disappears from the electromagnetic self-mass obtained from the self-force on an accelerated body. For consistency of the description, the energy and momentum of the electromagnetic field associated with the charge must then also be evaluated for fixed time in the momentary rest frame of the body. The energy–momentum vectors for the particle and the field, calculated in different reference frames, then refer to the same physical quantities, i.e., they are evaluated as sums over the same event points, and hence they transform as 4-vectors [31].
The authors are especially indebted to the late professor Jens Lindhard for numerous discussions and criticism on this issue in the first half of the 1990s. The authors are also grateful to E. Bonderup for detailed constructive criticism and to A.Kh. Khokonov for useful discussions and interest in this work.
References
Schott, G.A.: Electromagnetic Radiation and the Mechanical Reactions Arising from It. Cambridge University Press, Cambridge (1912)
Dirac, P.A.M.: Classical theory of radiating electrons. Proc. R. Soc. London. Ser. A. 167, 148 (1938)
Schwinger, J.: On the classical radiation of accelerated electrons. Phys. Rev. 75, 1912 (1949)
Jackson, J.D.: Classical Electrodynamics, 3rd edn. Wiley, New York (1999)
Grøn, Ø.: Electrodynamics of radiating charges. Adv. Math. Phys. 2012, 1 (2012)
Piazza, A.D., Wistisen, T.N., Uggerhøj, U.I.: Investigation of classical radiation reaction with aligned crystals. Phys. Lett. B. 765, 1 (2017)
Feynman, R.P.: Lectures on Physics II. Addison-Wesley, Reading (1964)
Baier, V.N., Katkov, V.N., Strakhovenko, V.M.: Electromagnetic Processes at High Energies in Oriented Single Crystals. World Scientific, Singapore (1998)
Khokonov, M.K., Nitta, H., Nagata, Y., Onuki, S.: Electron-positron pair production by photons in nonuniform strong fields. Phys. Rev. Lett. 93, 180407 (2004)
Galley, C.R., Leibovich, A.K., Rothstein, A.K.: Finite size corrections to the radiation reaction force in classical electrodynamics. Phys. Rev. Lett. 105, 094802 (2010)
Poincaré, H.: On the dynamics of the electron. Rend. del Cir. Mat. di Palermo. 21, 129 (1906). Translation: On the Dynamics of the Electron. https://en.wikisource.org/wiki/Translation:On_the_Dynamics_of_the_Electron_(July)
Schwinger, J.: Electromagnetic mass revisited. Found. Phys. 13, 373 (1983)
Medina, R.: Radiation reaction of a classical quasi-rigid extended particle. J. Phys. A Math. Gen. 39, 3801 (2006)
Yaghjian, A.: Relativistic Dynamics of a Charged Sphere: Updating the Lorentz-Abraham Model. Springer, New York (2006)
Spohn, H.: Dynamics of Charged Particles and Their Radiation Field. Cambridge University Press, Cambridge (2004)
Rohrlich, F.: The dynamics of a charged sphere and the electron. Am. J. Phys. 65, 1051 (1997)
Rohrlich, F.: Classical Charged Particles, 3rd edn. World Scientific Publishing Company, New York (2007)
Kalckar, J., Lindhard, J., Ulfbeck, O.: Self-mass and equivalence in special relativity. Mat. Fys. Medd. Dan. Vid. Selsk. 40, 1 (1982). http://gymarkiv.sdu.dk/MFM/kdvs
Fermi, E.: Electrodynamic and relativistic theory of electromagnetic mass. Phys. Z. 23, 340 (1922). Translation: https://en.wikisource.org/wiki/Translation:Electrodynamic_and_Relativistic_Theory_of_Electromagnetic_Mass
Wilson, W.: The mass of a convected field and Einstein’s mass-energy law. Proc. Phys. Soc. 48, 736 (1936)
Kwal, B.: Les expressions de I\(^{\prime }\)énergie et de I\(^{\prime }\)impulsion du champ électromagnétique propre de I\(^{\prime }\)électron en mouvement. J. Phys. Radium 10, 103 (1949)
Landau, L.D., Lifshitz, E.M.: The Classical Theory of Fields. 4th ed. Course of Theoretical Physics, vol. 2. Butterworth-Heinemann, Oxford (1980)
Abraham, M.: Prinzipien der Dynamik des Elektrons. Ann. Phys. (Leipzig) 10, 105 (1903)
Lorentz, H.: Electromagnetic phenomena in a system moving with any velocity smaller than that of light. Proc. R. Neth. Acad. Art. Sci. 6, 809 (1904)
Heitler, W.: The Quantum Theory of Radiation, 3rd edn. Clarendon Press, Oxford (1954)
Born, M.: The theory of the rigid electron in the kinematics of the principle of relativity. Ann. Phys. (Leipzig). 30, 1 (1909). Translation: https://en.wikisource.org/wiki/Translation:The_Theory_of_the_Rigid_Electron_in_the_Kinematics_of_the_Principle_of_Relativity
Dillon, G.: Electromagnetic mass and and rigid motion. Nuovo Cimento 114, 957 (1999)
Ori, A., Rosenthal, E.: Calculation of the self force using the extended-object approach. J. Math. Phys. 45, 2347 (2004)
Møller, C.: The Theory of Relativity. Oxford University Press, London (1958)
Jantzen, R., Ruffini, R.: Fermi and electromagnetic mass. Gen. Relat. Gravit. 44, 2063 (2012)
Gamba, A.: Physical quantities in different reference systems according to relativity. Am. J. Phys. 35, 83 (1967)
Page, L.: Is a moving mass retarded by the reaction of its own radiation? Phys. Rev. 11, 376 (1918)
Fermi, E.: On the phenomenon in the vicinity of the world line. Rend. Mat. Acc. Lincei 31, 21 (1922)
Synge, J.L.: Relativity: The General Relativity. North-Holland, Amsterdam (1960)
Lindhard, J.: Lecture Note in Archives. Aarhus University, Aarhus (1988)
Pauli, W.: Theory of Relativity. Dover, New York (1958)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Expansion of Electromagnetic Fields Near Accelerated Charge
The retarded electromagnetic field at a space-time point \((\mathbf{r}, t)\), produced by a point charge q carrying out an assigned motion \(\mathbf{r}_0 (t')\), is determined by the state of motion of the charge at an earlier time \(t'\) (see [4], formulas (14.13) and (14.14), or [22] formula (63.8)]),
where \({\pmb \beta }' \equiv {\pmb \beta }(t') = \mathbf{v}(t')/c\) is the velocity of the charge (relative to the speed of light) and \({\dot{{\pmb \beta }}}'=d {\pmb \beta }' /dt'\) is the acceleration (divided by c), \(\mathbf{n}' \equiv \mathbf{n} (t')\) is a unit vector in the direction towards the observation point, \(\mathbf {r}\), from the electron position at time \(t'\) (i.e., in the direction of \(\mathbf{r} - \mathbf{r}_0 (t')\) ) and \(R' \equiv R (t')\) = \(\mid \! \mathbf{R} (t') \! \mid \equiv \mid \! \mathbf{r} - \mathbf{r}_0 (t') \! \mid \). The primed quantities refer to the time \(t'\) defined as
The expression for the advanced field, \(\mathbf{E}_{adv}\), can be obtained from Eq. (A1) by a change of variables: \({\pmb \beta }' \rightarrow - {\pmb \beta }'\) and modification of Eq. (A3) to \(t' = t + R'/c\). After the following expansions, leading to formulas expressed in variables related to the electron motion at time t, the corresponding formulas for the advanced field are obtained simply by a change of sign of the velocity and its second derivative.

Illustration of the geometry for calculation of the retarded field in the vicinity of an electron
We are interested in the retarded electric field (A1) in the neighborhood of a moving charge q. The notation for the calculation of the field at time t at a point P with coordinate vector \(\mathbf {r}\) is illustrated in Fig. 2. Our aim is to express the field as a function of the radius vector of the point relative to the position of the charge at the same time t, \( \mathbf{R} (t) = \mathbf{r} - \mathbf{r}_0 (t) \equiv \mathbf{n} \varepsilon \), the acceleration, \(c {\dot{{\pmb \beta }}} (t)\), and the derivative of the acceleration, \(c \ddot{{\pmb \beta }} (t)\). For simplicity, we perform the calculations in the rest frame of the charge at time t,
We consider a variation of the distance \(\varepsilon \) of the point P from the charge for fixed \(\mathbf{n}\). The position of the charge at time t is fixed but the position at the earlier time \(t' =t - R'/c \) is a function of \(\varepsilon \) through the delay \(\tau \equiv R' /c\). We want to expand the field (A1) in the parameter \(\varepsilon \). The vector \(\mathbf{R}(t) - \mathbf{R} (t') = \mathbf{r}_0 (t') - \mathbf{r}_0 (t) \) depends on \(\varepsilon \) only through the parameter \(\tau \) and we may therefore first expand this vector in \(\tau \) and we obtain

To convert this expression into an expansion of \(R' = \mid \! \mathbf{R}(t') \! \mid \) in \(\varepsilon \) we note that since \(\beta = 0\) also the dependence on \(\varepsilon \) of the vector \(\mathbf{R}(t) - \mathbf{R} (t') \) must be of second and higher order. Hence the series expansion of \(R'\) has the form
Inserting this into Eq. (A5) and keeping terms of up to third order in \(\varepsilon \) in the norm of the vector \(\mathbf{R} (t')\) we obtain for the coefficients \(a_1\) and \(a_2\) in Eq. (A6)
where all quantities on the right hand side are taken at the time t. Also the velocity \(c {\pmb \beta }(t')\) is a function of \(\varepsilon \) only through \(\tau \) and may first be expanded in this parameter. To second order in \(\varepsilon \) this leads to
For the derivative, we need only include the first-order term \({\dot{{\pmb \beta }}}(t')\approx {\dot{{\pmb \beta }}} - (\varepsilon /c) \ddot{{\pmb \beta }} \).
The expansion of the unit vector \(\mathbf{n} (t')\) may be obtained from the ratio of the expressions in Eqs. (A5) and (A6), and to second order we obtain
Inserting these expansions into Eq. (A1) we obtain
and from insertion of Eqs. (A10) and (A11) into Eq. (A2),
Expansions of this type were first performed by Page (see formulas (21)–(24) in [32]). Dirac did the same calculations in covariant form [2] and for \(\beta =0\) formula (A11) is the same as the expression (60) in [2]. Heitler also considered the expansion (A11), retaining terms of even order in \(\mathbf {n}\) only (see Eq. (14) in [25], §4]). The first two terms in Eq. (A11) were applied in [18] and characterized as a first-order expansion in the acceleration.
Appendix B: Equivalence from Flux of Field Momentum
To prove complete consistency of the two methods for calculation of the electromagnetic mass, from the internal forces between charge elements and from the flux of field momentum, we need to show that the result in Eq. (36) also holds for \(\varepsilon \rightarrow R\) and hence agrees with Eq. (14) in this limit. This is a little more complicated because we must now distinguish between the unit vector \(\mathbf{n}\) in the direction from a charge element dq to a point on the surface and the surface normal \(\mathbf{n}_{s}\) (see Fig. 3). The momentum flux may be written as a double integral over charges \(dq_1\) and \( dq_2\) at distances \(\varepsilon _1\) and \(\varepsilon _2\) from a point on the sphere and with unit vectors \(\mathbf{n}_1\) and \(\mathbf{n}_2\) towards this point. For simplicity we include here only the terms in Eq. (6) proportional to \(\varepsilon ^{-2}\) and \(\varepsilon ^{-1}\) which determine the reactive self-force and hence the electromagnetic electron mass. Using the symmetry between \(dq_1\) and \(dq_2\) we obtain

Geometry for calculation of the momentum flux into the sphere S with radius \(\varepsilon \). The electric field is generated by a uniformly distributed charge q on a spherical surface with radius \(R<\varepsilon \)
This is the momentum flux into the sphere which should be integrated over the surface as in Eq. (33). For the two terms proportional to \((\varepsilon _1^2\varepsilon _2^2)^{-1}\) this gives zero. Consider then the second and last terms, both with the pre-factor \((2c\varepsilon _1^2\varepsilon _2)^{-1}\) and with the factors
We rearrange to
In the expression (B1) the distances \(\varepsilon _1\) and \(\varepsilon _2\) are fixed for fixed values of \((\mathbf{n}_1 { \mathbf n}_s)\) and \((\mathbf{n}_2 \mathbf{n}_s)\). We keep the position of \(dq_2\) fixed but average over the position of \(dq_1\) on a circle around \(\mathbf{n}_s\), i.e., for fixed \( (\mathbf{n}_1 \mathbf{n}_s )\). This leads to \( \mathbf{n}_1 \rightarrow (\mathbf{n}_1 \mathbf{n}_s ) \mathbf{n}_s \). Introducing this replacement into the two expressions above we see that they both become equal to zero. This leaves
First integrate over \( dq_2\). Only the Coulomb part of the field has survived and from electrostatics we know that the Coulomb field from a uniformly charged spherical shell is the same outside the shell as from the total charge at the center of the sphere. (The radius \(\varepsilon \) must remain infinitesimally larger than R, \(\varepsilon \rightarrow R_{+}\). Within the charged surface the field is only half as large). So the integral becomes
This momentum flux should then be integrated over the sphere with radius \(\varepsilon \),
where the angles \(\theta \), \(\varphi \) define the direction towards \(dq_1\) from the center of the sphere relative to the direction of \(\mathbf{n}_s\). We may perform the integration over solid angles first. For fixed values of \(\theta \) and \(\varphi \) the distance \(\varepsilon _1\) is constant. The directions \(\mathbf{n}_s\) and \(\mathbf{n}_1\) rotate together, covering the \(4\pi \) solid angle, so the average over \(\mathbf{n}_s\) corresponds to an average over \(\mathbf{n}_1\). According to Eq. (13) we therefore obtain
For \(\varepsilon = R \) this result is identical to the reactive self-force in Eq. (3).
In analogy to Eq. (37), we must introduce the KLU-correction in the integral over forces, now with the expression (B1) for the momentum flux. Again the relativistic correction factor is only important for the two Coulomb terms. We can apply the same trick as before and make the replacements \(\mathbf{n}_1 \rightarrow (\mathbf{n}_1 \mathbf{n}_s) \mathbf{n}_s\) and then the two terms can be combined. Since the scalar multiplication of \(\mathbf{n}_1\) (or \(\mathbf{n}_2\)) by \(\mathbf{n}_s\) can be carried out after the integration over \(dq_1\) (or \(dq_2\)) we can use the fact that the field from the charged shell is the same as that from the total charge placed at the center, and we once again obtain the correction in Eq. (37).
Appendix C: Fermi Solution of 4/3-Paradox
Around 1920 Enrico Fermi wrote several papers related to the problems encountered in calculations of the electromagnetic mass of an electron [19]. However, they have remained relatively unknown to most of the physics community, probably because the papers were published in an Italian journal. The concluding paper was also published in German and it has recently become accessible on the Internet, translated into English [19]. In the words of Jantzen and Ruffini [30], though often quoted, it has rarely been appreciated nor understood for its actual content. These authors give a detailed account of Fermi’s work but like [18] their paper is published in a journal with a limited readership, and both papers have received very few citations. We shall here give a brief account of Fermi’s approach to the problem. As seen below, there are both similarities and interesting differences to the treatments we have discussed.
There is no doubt that Fermi’s view of the source of the problem was very similar to that expressed in the later paper by Kalckar, Lindhard and Ulfbeck [18], as demonstrated by the following quotes from the introduction. After introducing the two conflicting values or the electromagnetic mass, with and without the factor 4/3, Fermi writes: “Especially we will prove: The difference between the two values stems from the fact, that in ordinary electrodynamic theory of electromagnetic mass (though not explicitly) a relativistically forbidden concept of rigid bodies is applied. Contrary to that, the relativistically most natural and most appropriate concept of rigid bodies leads to the value \(U/c^2\) for the electromagnetic mass.” And further below: “In this paper, HAMILTON’s principle will serve as a basis, being most useful for the treatment of a problem subjected to very complicated conditions of a different nature than those considered in ordinary mechanics, because our system must contract in the direction of motion according to relativity theory. However, we notice that although this contraction is of order of magnitude \(v^2/c^2\), it changes the most important terms of electromagnetic mass, i.e, the rest mass.”
Fermi’s paper is not easy to read and understand, partly because he uses a description of relativistic kinematics with an imaginary time axis (and there are a number of confusing misprints). The Lorentz transformation between reference frames in relative motion can then formally be described as a simple rotation of the 4-dimensional coordinate system, with a complex angle of rotation. However, we shall keep the notation applied in the main part of this paper.
The electromagnetic self-force can be derived from the principle of least action [22]. Fermi distinguishes between two cases, A and B. In case A we disregard the relativistic effects and consider the time t to be a common parameter for all elements of the rigid body. The part of the action responsible for the interaction of the charges with the electromagnetic field is then
where \(A^\nu =(\varphi , \mathbf{A})\) is the four-potential and \(j^\nu =(c\rho , \mathbf{j})\) the four-current, with \(\nu = 0,1,2,3\). The differential is \( d^4 x = cdtdV\), where dV is a differential spatial volume. In the last expression \(x^\nu (t)\) is the world line of the charge element dq, \(x^\nu =(ct, \mathbf{r})\), and \(A_\nu \) is the four-potential at this line.
According to the variational principle, the action should remain stationary for variations of the motion. In this connection, the definition of the integration region in Eq. (C1) is important. For a point particle, the initial and final coordinates are to be kept fixed and this constrains the variations of the world line. Similarly, we must require that the charge elements dq in Eq. (C1) have fixed coordinates at the limits of integration over t in the variation of the action integral,
where \(\delta x^0 =0\) while \(\delta x^k\) for \(k=1-3\) are arbitrary functions of t except for the condition that they vanish at the limits of integration. The last term in Eq. (C2) can be integrated by parts,
Switching the symbols \(\mu \) and \(\nu \) in this last term we then obtain
where \(F_{\nu \mu }\) is the electromagnetic field tensor defined in Eq. (38). When the mechanical action for the particle is included in the variation (C2), the expression (C3) provides the Lorentz force in the equation of motion for the particle. Here we assume the mechanical mass to be zero and consider instead the balance between the force from an external field \( \mathbf{E}^{(e)}\) and that from the internal field \( \mathbf{E}^{(i)}\) given by Eq. (6) (first two terms). In the rest frame all the velocities vanish and only the term with \(\nu = 0\) remains in Eq. (C3). The four-vector \(F_{0\mu }\) is given by \((0,\mathbf {E})\) and the variational principle leads to the relation
Fermi notes that “we would have arrived at these equations without further ado, when we (as it ordinarily happens in the derivation of the electromagnetic mass and as it was essentially done by M. Born as well) would have assumed from the outset, that the total force on the system is equal to zero. However, we have derived Eq. (C4) from HAMILTON’s principle, to demonstrate the source of the error” [19].
As we have seen in Sect. 2, evaluation of the internal contribution leads to the 4/3 coefficient in the self-force,
Here U is the electromagnetic self-energy,
where \(\varepsilon \) is the distance between the two charge elements. The external force is obtained as
and we obtain from Eqs. (C4) and (C5) the force
Fermi concludes that comparison of this equation with the basic law of point dynamics, \(\mathbf{K}=m \mathbf{g}\), finally gives us
Fermi then argues that this procedure cannot be correct. Instead we must introduce the coordinates and the field in the momentary rest frames, i.e., in 3-dimensional planes perpendicular to the four-velocity, and specify the integration region as a section between two such planes of the world tube traveled by the body. In Eq. (C1), both the product of the two four-vectors and the differential are invariant under Lorentz transformation. We may imagine the integration region split into differential slices between two such planes. The width of the slices is given by the differential time dt. From geometrical considerations of rigid acceleration of a body momentarily at rest, Fermi derived a relation corresponding to Eq. (19) and (D9) for \(\gamma =1\),
where dt and \(dt_0\) are the incremental times at \(\mathbf {r}\) and at a reference point on the body, \(\mathbf{r}_0\), respectively, \(\mathbf {g}\) is the acceleration at \(\mathbf{r}_0\), and \( \mathbf{R} = \mathbf{r} - \mathbf{r}_0\). The expression for the action integral then becomes
where \(\tau _0\) is the proper time for the reference point \(\mathbf{r}_0\) on the body.
This defines his case B. In his own words: “Now it can be immediately seen, that variation A is in contradiction with relativity theory, because it has no invariant characteristics against the world transformation, and is based on the arbitrary space x, y, z. On the other hand, variation B has the desired invariant characteristics, and is always based on the proper space, i.e., the space perpendicular to the world tube. Thus it is without doubt to be preferred before the previous one.”
Instead of Eq. (C3) we then obtain
Since the displacement \(\delta \mathbf{r}\) is arbitrary, this leads to the relation in Eq. (C4) with the additional factor in parenthesis. This factor can be neglected for the external field if we choose the reference point \(\mathbf{r}_0\) as the center of charge (it is a very small correction in any case) and we obtain
Let us consider the last term in Eq. (C13). It is only important for the leading Coulomb term in \(\mathbf{E}^{(i)}\) and we obtain
Switching notation, \( \mathbf{r} \longleftrightarrow \mathbf{r}'\), we obtain the same expression with the last parenthesis replaced by \((\mathbf{r}_0 - \mathbf {r}')\). Averaging the two expressions we eliminate the reference coordinates and obtain for a spherically symmetric charge distribution
With this expression for the last term in Eq. (C13) we obtain the proper relativistic equivalence between electromagnetic mass and energy.
Did Fermi’s 1922-paper then present a satisfactory solution of the 4/3-problem, which was overlooked, not appreciated, or forgotten? In our view it fell well short of this. Fermi’s argument for case B to be preferred did not identify the key problem with the calculation in case A. This calculation is not as claimed in contradiction with relativity theory and there is nothing wrong with the result in Eq. (C4), except that it is not directly relevant to the description of an accelerated rigid body. It expresses the condition for conserved total momentum as a function of laboratory time. However, as pointed out in [18], the electromagnetic mass of the rigid body is not determined by the sum of forces in Eq. (C7) through the analogy to point dynamics, leading to Eq. (C9), but by the forces on the individual parts of the body through the relation in Eq. (23). As expressed in Eq. (26), this corresponds to a definition of the total momentum of the body as the sum of the momenta of its parts for fixed time in the momentary rest frame.
This relation is obtained more directly in case B because here the formulation of the variational calculation is consistent with the relativistic concept of rigid body motion. The origin of Fermi’s basic formula (C10) for time differentials at different positions is the Eq. (4) in [33], which links the proper time intervals in the small spatial region in the vicinity of the world line in Riemannian space. In that paper Fermi also introduced the so-called ‘Fermi coordinates’ applied here in case B (see §10, Chap. 2 in [34]).
Fermi’s paper was not cited in [18] but the authors’ view on this and later related papers is indicated by comments to a list of references in a note for a lecture series on ‘Surprises in Theoretical Physics’, given by Jens Lindhard at Aarhus University in 1988 [35]: “E. Fermi [19] started out from general relativity and suggested a covariant definition of self-mass, whereby \(4/3\rightarrow 1\). His suggestion was forgotten, even by himself. Similar attempts were tried by Wilson [20] and Kwal [21]. Rohrlich took it up again in his textbook [17], using a formal definition of a covariant classical electron. Dirac [2] formulated a classical theory of the electron, where he sidestepped the problem.”
Appendix D: Solution for Point Electron with Born–Dirac Tube
Following Dirac [2], let us surround the singular point-electron world line in space-time with a thin tube with constant radius \(\varepsilon \) in the electron’s rest frame for any instant of the electron time-coordinate \(\tau \) in the laboratory frame. The self-force is then to be calculated from the transport of momentum across the surface of this tube. Consider the four-vector \(\eta ^\mu = x^\mu - z^\mu (s)\), where \(z^\mu (s) = (c\tau , \mathbf{r}_0 (\tau ))\) is the world line of the electron and \(x^\mu \) is some point in the vicinity of this world line. The parameter s is the proper time multiplied by the velocity of light \(ds = cd\tau /\gamma \), where \(\gamma (\tau ) = (1 - \beta ^2)^{-1/2}\) is the Lorentz factor and \(c {\pmb \beta }= d \mathbf{r}_0 /d\tau \). We assume that the points \( x^\mu \) are such that the vector \(\eta ^\mu \) is perpendicular to the four-velocity of the electron, \(u^\mu = dz^\mu /ds \), and the surface of the Born–Dirac tube is then defined by two equations [2, 26]
These equations define a 2-dimensional structure (a sphere) in 4-dimensional space for fixed value of s. When the electron moves, this structure forms a 3-dimensional surface f of a tube. Equation (D2) defines a 3-dimensional plane which is perpendicular to the four-velocity and intersects the four-sphere defined by Eq. (D1). An analogue of the tube in three dimensions is illustrated in Fig. 4.
Following again Dirac, let us make a variation of the point \(x^\mu \) on the surface f to the point \(x^\mu + dx^\mu \), also on this surface. Let us suppose that this point is on the 3-dimensional plane corresponding to \( s+ds\). Differentiating the Eqs. (D1) and (D2) we obtain
Using Eq. (D2) and the relation \(u^\mu u_\mu = 1\) we obtain from these equations the following relations
Let us split up the four-space variation on the tube surface f into a part, \(dx^\mu _\perp \), orthogonal to the four-velocity \(u^\mu \) and a part, \(dx^\mu _\parallel \), parallel to \(u^\mu \). The latter can be written as \(dx_\parallel ^\mu =cdt(1,{\pmb \beta }(\tau ))\), i.e., the velocity is the same as that of the electron but the laboratory times t and \(\tau \) are different, as we also found from the analysis in Sect. 3. These differentials can be visualized in the 3-dimensional analogue in Fig. 4. Here the surface f is two-dimensional and \(dx^\mu \) can be split into a component along the circle, which is an intersection of the tube surface with the \(x'y'\)-plane, and a component parallel to the \(t'\) -axis, i.e., parallel to the electron three-velocity in the laboratory frame at the time \(\tau \).

Minkowski diagram of a 3-dimensional analogue of the Born–Dirac tube around the world line of an electron (dashed red line) accelerated in the x-direction. Here \(\tau \) is the time coordinate of the electron in the laboratory frame (t, x, y) where it is at rest for \(\tau =0\), \(\eta ^2 \equiv \eta ^i\eta _i\) and \(\eta '^2 \equiv \eta '^i\eta '_i\). The coordinate system \((t',x',y')\) corresponds to the rest frame at a later time \(\tau \). The two circles with radius \(\varepsilon \) in the (x, y) and \((x',y')\) planes indicate the cuts of the tube surface with these planes and \(\eta ^i\) with \(i = 1-3\) are the laboratory coordinates of a radius vector in one of the two circles (Color figure online)
Let us find the connection between the two times. According to Eq. (D2) the 4-plane intersecting the world-tube is defined by
The time variations of this equation gives,
where \(\mathbf{R} = \mathbf{r} - \mathbf{r}_0 (\tau )\). We found above that if we choose \(dx^\mu \) to be parallel to the electron velocity then \(d\mathbf{r} = c{\pmb \beta }dt\). Insertion of this into Eq. (D8) leads to
which agrees with Eq. (19).
The 3-dimensional surface element of the tube is equal to \(d^3 f = |dx^\mu _\parallel | dS\), where dS is a surface element of the sphere defined in Eqs. (D1) and (D2), and using the relation (D6) we find (see also the expression (66) in [2])
For a calculation of the momentum transport in the rest frame this reduces to
We see that the factor in the parenthesis originates in the dependence of the time differential on the spatial coordinate in Eq. (D9), associated with the spatial variation of the acceleration. This in turn originates in the Lorentz contraction of the rigid sphere upon acceleration.
We now obtain for the momentum transport across a section of the tube corresponding to \(d\tau \), i.e., the transport through the rigid sphere surrounding the electron corresponding to this time interval,
with \(\mathbf{k}_s\) given in Eq. (34). As we have seen in Sect. 4 this leads to complete equivalence between the electromagnetic energy and mass outside the sphere.
Dirac calculated the energy–momentum transport through the tube for the retarded field from an accelerated point charge, including both terms in Eq. (4). However, to obtain an equation of motion he replaced the divergent inertial self-force (first term in Eq. (36) but without the factor 4/3!) by a term, \(- mc {\dot{{\pmb \beta }}}\), corresponding to a finite mass m. He applied an expansion similar to the one discussed in Sect. 2 but more general, avoiding the assumption \(\beta = 0\), and obtained a generalization of the formula (8) for the damping force,
with the four-force defined as the derivative of the four-momentum with respect to s ([2], last two terms on the left-hand side of Eq. (24)). Dirac discussed the \(0'\)th component of the four-force, the power term,
The second term corresponds to the power of irreversible emission of radiation and, according to Dirac, gives the effect of radiation damping on the motion of the electron. The first term is a perfect differential of a so-called acceleration energy [1] and corresponds to reversible exchange of energy with the near field (see also [3]). However, it should be noted that the other terms of the four-force do not separate so neatly and are mixed under Lorentz transformations.
An interesting derivation of the formula (D13) is given in [22] (see also [36], §32]). The first term is an obvious relativistic generalization of Eq. (8) but it does not have the property required by any four-force that it be perpendicular to the four-velocity. The second term is then added as a plausible extension remedying this deficiency. And it is this term that now accounts for the radiation reaction!
Rights and permissions
About this article

Cite this article
Khokonov, M.K., Andersen, J.U. Equivalence Between Self-energy and Self-mass in Classical Electron Model. Found Phys 49, 750–782 (2019). https://doi.org/10.1007/s10701-019-00279-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10701-019-00279-7