Abstract
Implementation of projects with an acceptable quality level in the minimum cost and time has always been the ultimate goal of managers and decision-makers in the construction industry. On the other hand, the construction industry is responsible for creating various environmental problems. Therefore, reducing the environmental destructive effects of project implementation is of utmost importance. The aim of this paper is to consider the environmental pollution along with the project iron triangle of cost, time, and quality in the scheduling of the construction projects. A multi-objective multi-mode resource-constraint project scheduling model is presented considering the generalized precedence constraints between project activities as well as the limitation of renewable resources and non-renewable resources. In this study, the environmental effects of construction projects as well as the three conflicting goals of cost (budget), time (duration), and quality are taken into account. Also, the limitations of renewable and non-renewable resources as well as the generalized activity precedence relationships are incorporated into the proposed model. The proposed model was implemented on a rural water supply project including 25 activities and was solved using the fuzzy goal programming approach with GAMS software. Different combinations of activity modes were presented along with the start time of each activity considering four objective functions. The results showed that this project would be completed in 190 days, at the cost of $15,394, with the quality level of 0.835, and environmental effects of 0.372, which are between the optimal and worst objective functions values. In addition, the sensitivity analysis indicates the high efficiency of the proposed model and its capability in assisting project managers and planners.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The project scheduling problems deal with determining the start times of the project activities taking the precedence and resource constraints into account in order to achieve predetermined goals which may be related to time, cost, or quality. Minimizing project duration and total costs are always two substantial problems in real-world projects resulting in time and financial saving as well as efficient resource usage (Liu et al., 2013).
Initial studies assumed deterministic activity durations and did not take resource constraints into account for calculating project completion time. Methods such as critical path method (CPM) and programme evaluation and review technique (PERT) method were presented considering the finish-to-start type activity precedence relationships only. Further research revealed that beside activity precedence relationships, other restrictions and constraints such as resource limitations must be taken into account. Project scheduling problems that consider resource constraints are known as resource-constrained project scheduling problems (RCPSP). It should be noted that Blazewicz et al. (1983) proved that the RCPSP problems as the extension of job shop scheduling problems are NP-Hard. The RCPSP problems have been extended by several researchers (Hartmann & Briskorn, 2021). These problems are divided into different classifications based on the resource types (renewable and non-renewable), activity types (pre-emptive and multi-mode), and types of objective functions and data accuracy (deterministic and non-deterministic) (Habibi et al., 2018).
One alternative for shortening project makespan is to expedite activities; reducing the durations of activities always is associated with cost increase, which is known as the time–cost trade-off problem (TCTP). In the TCTP problem, it is assumed that activities can be performed in several modes with different cost and duration (Hartmann and Briskorn, 2021).
Expediting project activities may also influence on the quality level of project performance leading to the conventional time–cost–quality (TCQ) trade-off problems (Babu & Suresh, 1996). The time–cost–quality (TCQ) triangle is continuously pursued by project managers throughout the project life cycle; compressing project activities results in increased costs and reduced quality (Kerzner, 2017). On the other hand, carrying out a project with minimum cost and duration and in accordance with performance standards to gain competitive advantages is one of the capabilities of project management (Chen & Tsai, 2011). Time, cost, and quality are among the constraints that project managers face in all projects. They must manage and allocate the required resources within the specified time, cost, quality, and scope (Kerzner, 2019).
Accelerating project activities can influence environment, which has attracted the attention of researchers in recent years. Despite the development of industries and economic growth, the environment have been neglected for many years. Worrying destruction of the environment and natural resources as the result of the industrial and economic development became one of the reasons for the prevalence of "sustainable development thinking". To achieve the goal of sustainable development, it is necessary to control the environmental impact of extensive construction works due to their high pollution and consumption of resources. Construction works account for about 60% of energy and raw material consumption (Dong & Ng, 2015). This topic is also becoming increasingly involved with the notion of sustainable development, which is one of the key issues of the twenty-first century. An organization’s tendency to plan its activities and resource utilization programme in such a way as to respect the rights of future generations to environmental resources can highlight its commitment to embracing the theory of sustainable economy and taking positive steps towards sustainable development (Habibi et al., 2019).
Swift economic and population growth has caused several environmental problems such as air pollution, deforestation, global warming, and resource constraints. To achieve a desirable level of sustainable economic growth, environmental degradation must be controlled without diminishing real growth and welfare of society (Azam, 2016).
Many research works have been done on the relationship between environmental pollution, energy consumption, and economic growth. Azam (2019) conducted an empirical study in Brazil, India, China, and South Africa from 1981 to 2015 and showed that energy consumption affects economic growth, also, environmental pollution reduces the economic growth. Therefore, policymakers and decision-makers must pay attention to the reduction of environmental pollution as one of the criteria for achieving sustainable development.
Past studies on construction projects show the negative environmental impacts of this industry, so that the construction sector has been criticized for overconsumption of resources and worldwide environmental pollution. The construction industry ranked the third in producing GHG emissions, following the oil and gas and chemical industries (Ozcan-Deniz & Zhu, 2017).
In recent decades, following the advancement of science and technology the destructive effects of human activities on the environment have been increasingly paid more attention by individuals and organizations. Reducing pollution and the destructive environmental impacts is one of the important goals of any construction project (Farrell et al., 2001). Attention to environmental impact assessment (EIA) and the importance of legal issues dates back to the National Environmental Policy Act of 1969 (Mitchell et al., 2006) that requires organizations to submit the EIA reports before implementing projects in order to prevent the negative effects of projects on the environment. Therefore, beside the three principal goals and objectives of cost (budget), time (duration), and quality, the fourth goal of environmental impacts has also been considered by the contractors and employers of construction projects. The activity execution mode and the amount of needed resources are important to reduce the environmental impact of the activity. As an example, drilling can be done using manpower or excavator. Each of these execution modes has a different duration, cost, and quality. Drilling with excavator has less duration and cost. On the other hand, the pollution caused by drilling with excavators (noise pollution, air pollution, and soil pollution) is more than drilling with manpower. As another example, in road construction projects, different compositions of asphalt can have different costs and environmental impacts. According to the EPA (2009) report in the construction industry, different types of fuel and energy sources (electricity, fossil fuels, etc.), equipment idle time, repair and maintenance, equipment selection, and material recycling affect greenhouse gas emissions.
Therefore, reducing the negative environmental consequences of construction projects is extremely substantial and the techniques for decreasing energy consumption and environmental effects have been studied for several decades (Hong et al., 2014). EIA is an effective means to protect the environment and preserve natural resources so that the majority of the industrialized and developed countries have incorporated the EIA into their rules and regulations as well as the projects’ approvals. This method includes estimating and forecasting all environmental consequences and impacts arising from the implementation of project activities (Peche & Rodríguez, 2009). The EIA was originated in 1969, as part of the US National Environmental Policy Act which obliged all federal agencies to evaluate the potential impacts of activities on the environment (Montarroyos et al., 2019). Contractors should take the environmental impacts of construction works into account and try to mitigate them. This study proposes a comprehensive multi-objective optimization method considering the environmental effects of construction projects as well as the primary project targets of time (duration), cost (budget), and quality. In this paper, the substantial factor of environmental impacts is incorporated into the TCQ trade-off problem to choose the most suitable modes for executing project activities, taking both renewable and non-renewable resource constraints as well as all four types of activity precedence relationships into consideration.
2 Literature review
In this section, the relevant studies conducted on multi-objective RCPSP (MRCPSP) are examined.
2.1 Time–cost–quality (TCQ) trade-off problem
In the 1990s, researchers came to the conclusion that it is unwise to carry out a project at the right time and at the lowest cost, regardless of the quality of the project. Since then, the TCQ trade-off problem has emerged as a significant project scheduling problem. Babu and Suresh (1996) included the quality factor in the conventional time–cost trade-off problems. They assumed that in addition to the cost of each activity, quality changes linearly as activity duration changes. Khang and Myint (1999) applied Babu and Suresh's model to a real-world construction project in Thailand. El-Rayes and Kandil (2005) examined the discrete TCQ trade-off problem taking the road construction projects into consideration. Tareghian and Taheri (2006) developed an integer multi-objective model for the TCQ trade-off problem, considering each objective function separately and defining the desirable thresholds for the other two objective functions. Kim et al. (2012) developed a mixed integer mathematical programming model for time, cost, and quality trade-off problem. Mungle et al. (2013) used the genetic algorithm (GA) for solving the fuzzy TCQ trade-off problem considering a highway construction project as a case study. Nabipoor Afruzi et al. (2014) introduced the multiple modes TCQ trade-off problem. They applied the imperial competitive algorithm (ICA) to tackle the problem. Tavana et al. (2014) proposed a multi-objective project scheduling model with minimization of time and cost and maximization of quality and solved with an evolutionary algorithm. Ahadian et al. (2016) used a probabilistic programming approach for solving the TCQ trade-off problem considering the random variables for activity durations.
2.2 The environmental consequences of projects
Construction projects have substantial effects on the development of many countries. Nowadays, the number of construction projects is growing rapidly across the world. The construction sector has been criticized for the overconsumption of global resources and environmental pollutants (Xu et al., 2012). The amount of environmental pollutants produced by the construction industry in different countries has been estimated between 25 and 45%. The project implementation methods have significant impacts on resources consumption and environment (Yusof et al., 2016). In other words, considering the criteria for sustainable development in construction projects plays a crucial role in social, economic, and environmental impacts (Atanda & Öztürk, 2020; He et al., 2020; Perlingeiro et al., 2021; Wang, 2021). Therefore, in addition to decreasing project time and cost, project managers focus on the environmental effects of project implementation and seek to reduce them.
Marzouk et al. (2008) examined time, cost, and environmental impacts trade-off. They proposed the multiple objectives project scheduling model and used the genetic algorithm (GA) to solve it. They considered three different kinds of pollutants containing noise, dust, and poisonous gases for a real-world project. The total environmental pollution caused by the project was calculated by normalizing the amounts of pollutants at the activity level, and summing up them.
Ozcan-Deniz et al. (2012) developed an optimal project surveillance model considering the two conventional project goals and objectives including cost and time as well as the environmental effects. They used NSGA-II algorithm to tackle the problem. The environmental impacts were evaluated based on global warming potential (GWP) and life cycle assessment (LCA). Xu et al. (2012) introduced a discrete cost, time, and environmental effects trade-off problem. They addressed the ecological and environmental facets of project comprising water, groundwater, soil, and air pollution, noise, and waste. Liu et al. (2013) examined the principal project factors corresponding with the greenhouse gas emissions. They employed multiple objective particle swarm optimization (PSO) for balancing between CO2 pollutants and expenditures.
Cheng and Tran (2015) dealt with time, cost, and environmental effects trade-off applying meta-heuristic algorithms. They addressed the three different factors of gases, dust, and noise into consideration in a tunnel construction project with 25 activities, each of which had diverse execution modes with varying environmental impacts, cost, and duration. Ozcan-Deniz and Zhu (2017) suggested a multi-objective model including environmental impacts, time, and cost for a highway construction project. Feng et al. (2018) studied the time–cost–environmental impacts trade-off using discrete event simulation (DES) and particle swarm optimization algorithm in a hotel construction project in China. Askarifard et al. (2021) proposed a model with four objectives including minimizing cost, risk, and socio-environmental impacts.
Table 1 represents a brief review of past relevant studies.
A review of the relevant studies reveals that many researchers have examined the project scheduling problems in the construction industry taking different goals and objectives such as time, cost, and quality into account. Despite the significance of the problem of environmental impacts and the noteworthy contribution of the construction industry in environmental pollution, less attention has been paid to this field by researchers. This study presents a multi-objective model simultaneously considering four different objective functions of time (duration), cost (budget), quality, and environmental effects. Also, the fuzzy goal programming approach is utilized to solve the proposed model. On the other hand, previous research works have merely considered the limitation of renewable resources; however, this paper seeks to probe the fundamental and critical assumptions of real-world construction projects by taking both types of renewable and non-renewable resources into account. In addition, most previous studies have only assumed finish-to-start type of activity precedence relationships. But, all four types of activity precedence relationships have been considered in this research.
3 Mathematical programming model
The project activity network is expressed as an activity-on-node network (AON) where the graph of G = (N, A), N depicts the number of project activities and is equal to n + 2, n is the number of project activities. Activities 0 and n + 1 are also dummy start and finish activities and represent the start and end of the project, respectively. Furthermore, arcs (E) display the precedence relationships between the project activities A ⊂ N * N. The activity i of the G network encompasses a predetermined set of various execution modes Mi and must be implemented in one chosen execution mode only. In other words, if mode m is selected for executing activity i, it will keep on without interruption until it is accomplished. The amounts of cost, time, quality, and environmental effects are calculated and determined for each activity execution mode. Moreover, the use of renewable and non-renewable resources for each activity i in the execution mode m is defined. Since the start and finish dummy activities do not need any resources, their resource usage amounts are zero. At all times, the level of renewable resources is fixed, and the amount of non-renewable resources are predetermined based on the total project duration.
Assumptions
The following assumptions are considered to develop the mathematical programming model for the problem:
-
Environmental impacts are considered for each activity, and the model seek to balance the four different goals and objectives of environmental impacts, cost, time, and quality.
-
The number of activities is predetermined.
-
Project activities are multiple modes in nature, which means that various modes for execution have been specified for each activity.
-
The project work calendar contains 8 working hours per day.
-
Activity interruption is not permitted during execution.
-
Generalized precedence relations (GPR) exist between the activities.
-
Resources are considered as both types of non-renewable and renewable resources.
-
Parameters are deterministic and certain.
3.1 Notation and definition
Indices | |
i = 0, 1, 2, …, n + 1 | Set of activities |
mi = 1, 2, …, Mi | Set of modes of activity i |
Kα (k = 1, 2, …, Kα) | Number of renewable resources |
Kυ (k = 1, 2, …, Kυ) | Number of non-renewable resources |
Decision variable | |
\({x}_{i{m}_{i}t}\) | If activity i starts in mode mi and at time t, it is equal to 1, otherwise equal to 0 |
Parameters | |
\({d}_{i{m}_{i}}\) | Duration of the given activity i associated with mode mi |
\({c}_{i{m}_{i}}\) | Implementation cost of activity i associated with mode mi |
\({q}_{i{m}_{i}}\) | Quality level of implementing activity i associated with the execution mode mi |
\({e}_{i{m}_{i}}\) | Environmental effects of activity i associated with mode mi |
\({R}_{k}^{\alpha }\) | The accessibility of renewable resource k in each time period |
\({r}_{i{m}_{i}k}^{\alpha }\) | Required amount of renewable resource k for performing activity i under mode mi |
\({R}_{k}^{\upsilon }\) | Accessibility of non-renewable resource k during the project |
\({r}_{i{m}_{i}k}^{\upsilon }\) | Consumption of renewable resource k by activity i in execution mode mi |
w i | Corresponding importance weight of activity i |
\({fs}_{ij}\) | The requisite time lag between the finish of activity i and the start of activity j |
\({sf}_{ij}\) | The requisite time lag between the start of activity i and the finish of activity j |
\({ss}_{ij}\) | The requisite time lag between the start of activity i and the start of activity j |
\({ff}_{ij}\) | The requisite time lag between the finish of activity i and the finish of activity j |
R α | Set of renewable resources |
R υ | Set of non-renewable resources |
ESi | The earliest time to start the ith activity |
LSi | The latest time to start the ith activity |
E fs | The set of arcs where the activities i and j have the finish-to-start type precedence relationship with the time lag fsij. That is, the jth activity starts with a certain delay after the finish of the ith activity |
E sf | The set of arcs where the activities i and j have the start-to-finish type precedence relationship with the time lag sfij. That is, the jth activity finishes with a certain delay after the start of the ith activity |
E ss | The set of arcs where the activities i and j have the start-to-start type precedence relationship with the time lag ssij. That is, the jth activity starts with a certain delay after the start of the ith activity |
E ff | The set of arcs where the activities i and j have finish-to-finish type precedence relationship with the time lag ffij. That is, the jth activity finishes with a certain delay after the finish of the ith activity |
The inputs of each activity include the required renewable and non-renewable resources, and the duration, quality, cost, and environmental consequences are noted as the activity outputs.
The model consists of four objective functions. Equation 1 shows the first objective function which minimizes project duration or start time of the dummy finish activity. The dummy finish activity of the project is n + 1, which has one execution mode. Equation 2 corresponds with the second objective function which is the minimization of project costs. Equation 3 shows the third objective function of maximizing the total project quality which is obtained from the weighted average of the quality levels of all activities. Equation 4 represents the fourth objective function for minimizing the environmental effects of the activities. Since any project has its own unique characteristics and surrounding environment and may have considerable environmental consequences, these consequences are examined in both physico-chemical and biological characteristics of environment.
The proposed model in this research is an extension of the model developed by De Reyck and Herroelen (1999) for solving the multi-mode resource-constrained project scheduling problem (MRCPSP). MRCPSP is an extension of RCPSP is NP-Hard as well. De Reyck and Herroelen (1999) considered the activity precedence relationships and the availability of renewable resources with the single objective of minimizing project duration. However, in this study, the availability of both renewable and non-renewable resources along with four conflicting objective functions containing time (duration), cost (budget), quality, and environmental effects is incorporated into the model.
The mathematical programming model includes three different types of constraints (execution mode of each activity, activity precedence relationship, and resource constraints) as follows. Equation 5 dictates only one execution mode must be chosen for each activity. Equations 6–9 show the generalized precedence relationships between activities: start to start (SS) (Eq. 6), start to finish (SF) (Eq. 7), finish to start (FS) (Eq. 8), and finish to finish (FF) (Eq. 9). Equation 10 indicates the total usage of any type of renewable resource per unit of time cannot exceed its available amount. Equation 11 shows that the total usage amount of any type of non-renewable resource cannot exceed its total predetermined amount. Equation 12 defines the decision variables of the proposed model.
4 Solution methodology
It is difficult and impractical to simultaneously optimize all conflicting objectives in a multi-objective model. In this regard, a multi-objective optimization model involves finding a set of practical or efficient solutions in a way that no other solution is better (Govindan et al., 2017). In this paper, the fuzzy goal programming method is used to solve the proposed multi-objective model. The fuzzy goal programming method is the extension of the goal programming method as a method for solving multi-objective optimization problems (Rubin & Narasimhan, 1984). In the fuzzy goal programming method, an aspired goal is defined for each objective using the fuzzy membership function, and the value of each goal varies between zero and one. The objective function of the fuzzy goal programming method is to minimize the maximum level of failure in achieving each goal (Lotfi et al., 2014).
In general, a multi-objective decision-making (MODM) problem can be stated as follows:
Suppose the optimal value of each goal (i = 1, 2, …, n) is \({f}_{i}^{*}\). In real MODM problems, due to the conflict among the objectives, there is usually no x* ∈ X answer for which all objectives are optimized \((\nexists {x}^{*}\in X :{f}_{i}^{*}= {f}_{i}\left({x}^{*}\right)\). Hence, if A is a solution method and the answer \({x}^{A}\) is obtained as its output, then this method A is more efficient when \({f}_{i}\left({x}^{A}\right)\) is closer to \({f}_{i}^{*}\).
In the fuzzy goal programming method which is based on the linear membership function, an acceptable value is first considered for each goal, which, for example, can be the optimal value of that objective (\({f}_{i}^{*}\)). Then the membership function is specified in such a way that by decreasing the objective function value, the value of the fuzzy membership function (or the aspired goal) increases linearly. Assume that \({m}_{i}={f}_{i}^{*}\) is considered as the optimal value of the ith objective and Mi as the upper limit of this objective. Accordingly, in the FGP method, if the ith objective is \({f}_{i}(x)\stackrel{\sim }{\le }{m}_{i}\), it can be expressed using the following aspired goal:
where Mi − mi is the tolerance interval. If the fuzzy goal is \({f}_{i}(x)\stackrel{\sim }{\ge }{m}_{i}\), the membership function of the fuzzy goal will be as follows:
Then, the MODM model is expressed as a single-objective model using the fuzzy goal programming method as follows:
in which if \({f}_{i}\left(x\right)\to {m}_{i}\) then \({G}_{i}\left(x\right)\to 1\). It should be noted that in the fuzzy goal programming method, \({G}_{i}\left(x\right)\) is a triangular fuzzy number and its expression is linear with respect to the decision variable x and the objective function \({f}_{i}\left(x\right)\). Therefore, if the initial model is linear, the linearity of the model is eliminated, and there is no complexity in finding the global optimal solution. Sometimes, instead of the above formulation, the minimax formulation is used in which the maximum or max deviation from the optimality of the objective functions is minimized or becomes min. This formulation is expressed as follows:
where \({L}_{\infty }\) represents the infinity norm and di(x) represents the relative deviation of each objective function from its optimal value. The infinity norm means that the largest deviation in the available deviations is considered for optimization. The above relationship can be linearized as follows:
To solve the RCPSP model described in the previous section, the problem is first rewritten as a single-objective model using the fuzzy goal programming method. For this purpose, we assume that the following values for goals are obtained through the payoff matrix:
\(\underset{\_}{{F}_{1}}\) | Minimum time |
\(\overline{{F}_{1}}\) | Maximum time |
\(\underset{\_}{{F}_{2}}\) | Minimum cost |
\(\overline{{F}_{2}}\) | Maximum cost |
\(\underset{\_}{{F}_{3}}\) | Minimum quality |
\(\overline{{F}_{3}}\) | Maximum quality |
\(\underset{\_}{{F}_{4}}\) | Minimum environmental impacts |
\(\overline{{F}_{4}}\) | Maximum environmental impacts |
We try to minimize the time objective function (F1), the cost objective function (F2), and the objective function of environmental impacts (F4), and maximize the quality objective function (F3).
Then, the objective functions in the deterministic, alpha-cut, and possibilistic states are summarized as follows:
It is of note that after applying the fuzzy goal programming approach to establish a trade-off between the objective functions, the deterministic/nominal model for solving the MRCPSP problem in this research is mixed linear programming which can be solved by Solver CPLEX in GAMS software.
5 Results and discussion
The mathematical model presented in this research was implemented in a rural water transfer project in Birjand, the capital city of South Khorasan Province. The rusty old 3-km-long pipeline was replaced by a new one. This project included 25 activities.
The first activity of the project (equipping the workshop) and the last activity of the project (rectification of defects and provisional handover) have one execution mode (Fig. 1). Each of other project activities has seven different execution modes defined by experts and the project team based on different combinations of resources. Among these seven execution modes, the first mode is the one with the minimum usage of resources per unit of time. The second mode is associated with the most likely mode; the other modes were determined by changing the amount of resource usage per unit of time and the duration of each activity.

Activity network of the project
According to the project activity network, this project has 25 activities. Activities zero and 26 are considered as dummy activities in the proposed mathematical programming model. The project resources fall into three categories including manpower, materials, equipment and machinery which are considered as project inputs. The inputs of each activity include unskilled worker, skilled worker (manpower), cement (material), and excavator (equipment and machinery). It should be noted that cement is non-renewable (consumable) resource, and unskilled worker, skilled worker, and excavator are renewable (non-consumable) resources.
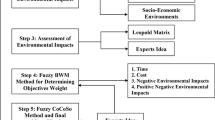
Each execution mode of any activity has its associated quality, cost, time, and environmental consequences. The costs of acquiring resources in each working day were calculated so that the associated costs of each activity execution mode were calculated. Each project activity has a specific weight in terms of its importance in the project, which was calculated according to the desirable level of work breakdown structure (WBS) of the project. In other words, the weight of each activity corresponds with the value of each activity in the entire project and shows the impact of that activity on the progress of the project. In this study, the importance weight of each activity was determined regarding the duration of that activity considering its most likely execution mode (second execution mode). General factors of EIA in construction projects were identified based on the study conducted by Zhu et al. (2019). Among the physico-chemical, biological, economic, and socio-cultural characteristics of environment, two physico-chemical and biological characteristics of environment were taken into account for the implementation phase of the project. During various meetings with the employer, contractor, and project consultants, seven major factors were addressed for assessing the environmental impacts of all activities. The factors consist of soil texture and pollution, sedimentation and erosion, groundwater and surface water pollution, noise, dust, and air pollution which are corresponding with the physico-chemical characteristics of environment, and the factors associated with the wildlife, protected areas, plant species, and habitats are corresponding with the biological characteristics of environment. Eventually, the environmental impacts associated with each activity execution mode were calculated using the Leopold (1971) matrix. The environmental impact of each activity depends on its duration and characteristics as well as the resources used for performing the activity. The method of scoring environmental impacts in the Leopold matrix is as follows: matrix columns indicate activities and rows display environmental factors. Two numbers are considered for each cell, one of which represents the intensity and range of the consequence, and the other one indicates the magnitude or importance of that impact. The numbers 1, 2, and 3 are used to indicate the range of the effect, which display the immediate range of the design, the range of direct effects and impacts, and the range of indirect consequences and impacts, respectively. The range and intensity of impacts and consequences on any environmental parameter vary from −1 to −5 (low to very high) for negative effects and from +1 to +5 (low to very high) for positive effects. Subsequently, the average of negative and positive effects corresponding with any environmental factor and activity is computed.
First, the single-objective of minimizing project duration was solved, and the value of 148 days was obtained as total project duration. Then, another single-objective of minimizing project costs was solved and the amount of $13,665 was achieved as total project costs. Subsequently, the other single-objective mathematical programming model with the objective of maximizing the project quality was solved and the value of 0.866 was acquired as the project quality level. Finally, the single-objective mathematical programming model with the objective of minimizing the environmental impacts was solved and the value of 0.311 was gained. Table 2 shows the findings of the four different deterministic single-objective mathematical programming models, respectively.
According to Table 2, the main diameter represents the best values for the four objective functions of the deterministic single-objective model. According to the table, the minimum amount of the project duration is 148 days, the minimum amount of the total project cost is $13,665, the maximum amount of the project quality is 0.866, and the minimum amount of the total environmental impacts is 0.311.
Figure 2 illustrates the different values of the four objective functions, respectively. The minimum project duration of 148 days is obtained as the best value of the objective function of minimizing the duration of the whole project. If the main project goal is to minimize the total costs or the environmental impacts, or maximize the total quality level of the project, the project duration will be 253 days.

The values of the four objective functions in the deterministic single-objective models
After implementing the deterministic single-objective model for each objective function individually, the model was implemented considering four objective functions to find out a trade-off between the four conflicting objectives. The maximum and minimum values of each objective function are shown in Table 3.
The results of the implementation of the multi-objective mathematical programming model and the trade-off between the objectives showed that the project will be completed within 190 days at a cost of $15,394. The total project quality and the environmental impacts will be 0.835 and 0.372, respectively (Table 4). Comparing these results with the minimum and maximum values of objective functions in Table 3 shows that the trade-off values are about 40% different from their minimum or maximum values, which is acceptable.
Table 5 displays the optimal execution mode of each activity considering the trade-off between the four objectives in the deterministic mathematical programming model. Table 6 shows the obtained start times of project activities.
The results of data analysis indicate that increasing the duration of the project reduces the environmental impacts of the entire project. Also, there is a direct relationship between environmental impacts and project cost, which is in line with the results of Cheng and Tran (2015). In addition, Ozcan-Deniz and Zhu (2017) showed that the correlation coefficient between time and environmental effects is 0.18 and between cost and environmental effects is 0.47. Wang et al. (2019) also pointed out that a large amount of air pollution is corresponding to the use of heavy machinery in the construction industry. On the other hand, the use of heavy machinery for performing project activities reduces the durations of activities and increases costs.
5.1 Sensitivity analysis
There are two types of constraints in the proposed model: precedence relationships between activities and the availability of renewable and non-renewable resources. Regarding the precedence relationships, changing the precedence relationships between activities and modifying the project activity network lead to changing the critical path and total project duration. Changing the precedence relationships between activities has no effect on the total cost of the project, because the total cost of the project is the sum of the cost of each activity. However, the total quality level and environmental consequences and effects of the project is calculated using the geometric mean.
Given the fact that resource constraints affect all four conflicting objective functions, the sensitivity analysis was performed based on the resource parameters. Four types of resources are considered for performing project activities. The renewable resources include unskilled worker (R1) with maximum 20 man-days, skilled worker (R2) with maximum 3 man-days, excavator (R3) with maximum 1 machine-day, and the non-renewable resources include cement (R4) with maximum 1280 kg for the whole project. Changing the amounts of resources affects the values of the objective functions. Table 7 shows the effect of changing each resource on the values of the objective functions values with 14 runs.
As shown in Table 7, the objectives of time, cost, quality, and environmental impacts were initially solved without considering resource constraints. Then, the changes of each resource were examined while holding the maximum values of the other resources constant, and the amount of changes of objectives was compared to the state of non-resource constraints. The sensitivity analysis of each of the objectives is illustrated in Fig. 3

The change of resource constraints on objective functions
As indicated in Table 7, when there are no constraints on the resources, the project can be completed at the highest cost within the shortest possible time. In other words, if the project is delivered within a short time and with high quality, the cost will increase. On the other hand, greater project cost and quality level can lead to minimizing the environmental effects and consequences of the whole project.
Figure 4 illustrates the changes of the four conflicting project objectives in relation to the changes of each resource in Table 7.

The changes of the values of four objective functions with the changes of resources
5.2 Practical implications
Due to the fact that reducing project cost, duration, and environmental effects together with raising project quality level are the principal needs and expectations of the main stakeholders, this study simultaneously examines these four important goals and objectives and helps project contractors and employers with selecting the suitable execution mode for performing each activity taking these four goals and objectives into account. It should be noted that since each project has unique characteristics and features, the findings of the case study cannot be extended to other projects. However, the proposed model can be applied to other construction projects to accomplish the project with the least possible duration, lowest possible costs and environmental consequences and effects, and highest possible quality level.
6 Conclusion
The environmental impacts of project implementation have become extremely important for project stakeholders such as governments and environmental protection organizations. As a result, incorporating the environmental impacts as well as the three conventional factors containing quality, time, and cost into the project scheduling models can be a challenging problem for project practitioners. In the present study, the cost–time–quality–environmental impacts trade-off problem was investigated taking both renewable and non-renewable resource constraints as well as generalized activity precedence relations (all four types of activity precedence relationships) into account leading to a comprehensive model which is close to the real-world project scheduling problems. Subsequently, the fuzzy goal programming method was used to solve the problem in hand. The proposed aforementioned model was tested in a rural water transfer project for validation.
Initially, the proposed model was implemented considering each objective function separately in order to find the optimal values of each objective function. It should be noted that the difference between the shortest and the longest project duration is 105 days, the variation between the lowest and the highest total project costs is $ 4143, the difference between the highest and lowest project quality level is 7%, and the deviation between the lowest and highest environmental impacts is 15%. Finally, this multi-objective trade-off problem was solved by using the fuzzy goal programming method. The trade-off results show that the objective function value for the total project duration was reduced by 25% from the longest project duration. The cost objective function value was lessened by 14% from the highest project cost, the quality objective function value was increased by 4% from the lowest project quality level, and the objective function value for environmental impacts was diminished by 19% from the greatest environmental effects. Therefore, the findings indicate that the proposed multi-objective model is able to balance the four conflicting objective functions.
Deficiency of related studies together with hardship in calculating and estimating the accurate cost, duration, and environmental consequences and impacts associated with the execution mode of each activity can be stated as the major research limitations.
As some suggestions for further studies, the proposed mathematical multi-objective model can be applied to other projects. In addition, the activity pre-emption and time lag between activities may be considered in the model. Also, due to the NP-Hardness of this problem, the meta-heuristic algorithms should be exploited to solve the large size optimization problems. Moreover, robust fuzzy optimization model can be employed to deal with the inherent uncertainty of the projects.
References
Ahadian, B., Veisy, O., & Azizi, V. (2016). A multi-objective stochastic programming approach for project time, cost and quality trade-off problem (TCQTP). Jordan Journal of Civil Engineering, 10(4), 553–564.
Aminbakhsh, S., & Sonmez, R. (2016). Discrete particle swarm optimization method for the large-scale discrete time–cost trade-off problem. Expert Systems with Applications, 51, 177–185. https://doi.org/10.1016/j.eswa.2015.12.041
Aouam, T., & Vanhoucke, M. (2019). An agency perspective for multi-mode project scheduling with time/cost trade-offs. Computers and Operations Research, 105, 167–186. https://doi.org/10.1016/j.cor.2019.01.012
Askarifard, M., Abbasianjahromi, H., Sepehri, M., & Zeighami, E. (2021). A robust multi-objective optimization model for project scheduling considering risk and sustainable development criteria. Environment, Development and Sustainability, 23(1–4), 1–31. https://doi.org/10.1007/s10668-020-01123-z
Atanda, J. O., & Öztürk, A. (2020). Social criteria of sustainable development in relation to green building assessment tools. Environment, Development and Sustainability, 22(1), 61–87. https://doi.org/10.1007/s10668-018-0184-1
Azam, M. (2016). Does environmental degradation shackle economic growth? A panel data investigation on 11 Asian countries. Renewable and Sustainable Energy Reviews, 65, 175–182. https://doi.org/10.1016/j.rser.2016.06.087
Azam, M. (2019). Relationship between energy, investment, human capital, environment, and economic growth in four BRICS countries. Environmental Science and Pollution Research, 26(33), 34388–34400. https://doi.org/10.1007/s11356-019-06533-9
Babu, A. J. G., & Suresh, N. (1996). Project management with time, cost, and quality considerations. European Journal of Operational Research, 88(2), 320–327. https://doi.org/10.1016/0377-2217(94)00202-9
Ballesteros-Perez, P., Elamrousy, K. M., & González-Cruz, M. C. (2019). Non-linear time-cost trade-off models of activity crashing: Application to construction scheduling and project compression with fast-tracking. Automation in Construction, 97, 229–240. https://doi.org/10.1016/j.autcon.2018.11.001
Berthaut, F., Pellerin, R., Perrier, N., & Hajji, A. (2014). Time-cost trade-offs in resource-constraint project scheduling problems with overlapping modes. International Journal of Project Organisation and Management, 6(3), 215–236. https://doi.org/10.1504/IJPOM.2014.065259
Blazewicz, J., Lenstra, J., & Rinnooy-Kan, A. (1983). Scheduling subject to resource constraints: Classification and complexity. Discrete Applied Mathematics, 5, 11–24. https://doi.org/10.1016/0166-218X(83)90012-4
Caldeira, C., Freire, F., Olivetti, E. A., Kirchain, R., & Dias, L. C. (2019). Analysis of cost-environmental trade-offs in biodiesel production incorporating waste feedstocks: A multi-objective programming approach. Journal of Cleaner Production, 216, 64–73. https://doi.org/10.1016/j.jclepro.2019.01.126
Chakrabortty, R. K., Rahman, H. F., & Ryan, M. J. (2020). Efficient priority rules for project scheduling under dynamic environments: A heuristic approach. Computers and Industrial Engineering, 140, 1–44. https://doi.org/10.1016/j.cie.2020.106287
Chen, X., Cheng, L., Deng, G., Guan, S., & Hu, L. (2021). Project duration-cost-quality prediction model based on Monte Carlo simulation. In Journal of Physics: Conference Series (Vol. 1978, No. 1, p. 012048). IOP Publishing. doi:https://doi.org/10.1088/1742-6596/1978/1/012048
Chen, S. P., & Tsai, M. J. (2011). Time–cost trade-off analysis of project networks in fuzzy environments. European Journal of Operational Research, 212(2), 386–397. https://doi.org/10.1016/j.ejor.2011.02.002
Cheng, M. Y., & Tran, D. H. (2015). Opposition-based multiple-objective differential evolution to solve the time–cost–environment impact trade-off problem in construction projects. Journal of Computing in Civil Engineering, 29(5), 1–14. https://doi.org/10.1061/(ASCE)CP.1943-5487.0000386
De Reyck, B., & Herroelen, W. (1999). The multi-mode resource-constrained project scheduling problem with generalized precedence relations. European Journal of Operational Research, 119(2), 538–556. https://doi.org/10.1016/S0377-2217(99)00151-4
Dong, Y. H., & Ng, S. T. (2015). A life cycle assessment model for evaluating the environmental impacts of building construction in Hong Kong. Building and Environment, 89, 183–191. https://doi.org/10.1016/j.buildenv.2015.02.020
El-Rayes, K., & Kandil, A. (2005). Time-cost-quality trade-off analysis for highway construction. Journal of Construction Engineering and Management, 131(4), 477–486. https://doi.org/10.1061/(ASCE)0733-9364(2005)131:4(477)
EPA. (2009). Potential for reducing greenhouse gas emissions in the construction sector. US Environmental Protection Agency.
Farrell, A., VanDeveer, S. D., & Jäger, J. (2001). Environmental assessments: Four under-appreciated elements of design. Global Environmental Change, 11(4), 311–333. https://doi.org/10.1016/S0959-3780(01)00009-7
Feng, K., Lu, W., Chen, S., & Wang, Y. (2018). An integrated environment–cost–time optimisation method for construction contractors considering global warming. Sustainability, 10(11), 1–23. https://doi.org/10.3390/su10114207
Ghamginzadeh, A., & Najafi, A. A. (2013). Solving resource-constrained discrete time-cost trade-off problem by memetic algorithm. Technical Journal of Engineering and Applied Sciences, 3(19), 2466–2475.
Govindan, K., Darbari, J. D., Agarwal, V., & Jha, P. C. (2017). Fuzzy multi-objective approach for optimal selection of suppliers and transportation decisions in an eco-efficient closed loop supply chain network. Journal of Cleaner Production, 165, 1598–1619. https://doi.org/10.1016/j.jclepro.2017.06.180
Habibi, F., Barzinpour, F., & Sadjadi, S. (2018). Resource-constrained project scheduling problem: Review of past and recent developments. Journal of Project Management, 3(2), 55–88. https://doi.org/10.5267/j.jpm.2018.1.005
Habibi, F., Barzinpour, F., & Sadjadi, S. J. (2019). A mathematical model for project scheduling and material ordering problem with sustainability considerations: A case study in Iran. Computers and Industrial Engineering, 128, 690–710. https://doi.org/10.1016/j.cie.2019.01.007
Hamta, N., Ehsanifar, M., & Sarikhani, J. (2021). Presenting a goal programming model in the time-cost-quality trade-off. International Journal of Construction Management, 21(1), 1–11. https://doi.org/10.1080/15623599.2018.1502930
Hartmann, S., & Briskorn, D. (2021). An updated survey of variants and extensions of the resource-constrained project scheduling problem. European Journal of Operational Research. https://doi.org/10.1016/j.ejor.2021.05.004
He, H., Tian, S., Tarroja, B., Ogunseitan, O. A., Samuelsen, S., & Schoenung, J. M. (2020). Flow battery production: Materials selection and environmental impact. Journal of Cleaner Production, 269, 1–21. https://doi.org/10.1016/j.jclepro.2020.121740
Hong, T., Ji, C., Jang, M., & Park, H. (2014). Assessment model for energy consumption and greenhouse gas emissions during building construction. Journal of Management in Engineering, 30(2), 226–235. https://doi.org/10.1061/(ASCE)ME.1943-5479.0000199
Hosseinzadeh, F., Paryzad, B., Pour, N. S., & Najafi, E. (2020). Fuzzy combinatorial optimization in four-dimensional tradeoff problem of cost-time-quality-risk in one dimension and in the second dimension of risk context in ambiguous mode. Engineering Computations., 37(6), 1967–1991. https://doi.org/10.1108/EC-03-2019-0094
Ilhan, B., & Yobas, B. (2019). Measuring construction for social, economic and environmental assessment. Engineering, Construction and Architectural Management., 26(5), 746–765. https://doi.org/10.1108/ECAM-03-2018-0112
Iranmanesh, H., Skandari, M. R., & Allahverdiloo, M. (2008). Finding Pareto optimal front for the multi-mode time, cost quality trade-off in project scheduling. World Academy of Science, Engineering and Technology, 40, 346–350. https://doi.org/10.5281/zenodo.1074393
Kannimuthu, M., Raphael, B., Palaneeswaran, E., & Kuppuswamy, A. (2019). Optimizing time, cost and quality in multi-mode resource-constrained project scheduling. Built Environment Project and Asset Management., 9(1), 44–63. https://doi.org/10.1108/BEPAM-04-2018-0075
Ke, H., & Ma, J. (2014). Modeling project time–cost trade-off in fuzzy random environment. Applied Soft Computing, 19, 80–85. https://doi.org/10.1016/j.asoc.2014.01.040
Kerkhove, L. P., & Vanhoucke, M. (2020). Multi-mode schedule optimisation for incentivised projects. Computers and Industrial Engineering, 142, 1–28. https://doi.org/10.1016/j.cie.2020.106321
Kerzner, H. (2017). Project management: A systems approach to planning, scheduling, and controlling (12th ed.). Wiley.
Kerzner, H. (2019). Using the project management maturity model: Strategic planning for project management (3rd ed.). Wiley.
Khang, D. B., & Myint, Y. M. (1999). Time, cost and quality trade-off in project management: A case study. International Journal of Project Management, 17(4), 249–256. https://doi.org/10.1016/S0263-7863(98)00043-X
Khosravani Moghadam, E., Sharifi, M., Rafiee, S., & Chang, Y. K. (2020). Time–cost–quality trade-off in a broiler production project using meta-heuristic algorithms: A case study. Agriculture, 10(3), 1–18. https://doi.org/10.3390/agriculture10010003
Kim, J., Kang, C., & Hwang, I. (2012). A practical approach to project scheduling: Considering the potential quality loss cost in the time–cost tradeoff problem. International Journal of Project Management, 30(2), 264–272. https://doi.org/10.1016/j.ijproman.2011.05.004
Leopold, L. B. (1971). A procedure for evaluating environmental impact (Vol. 28, No. 2). US Dept. of the Interior. doi:https://doi.org/10.3133/cir645
Liu, D., Li, H., Wang, H., Qi, C., & Rose, T. (2020). Discrete symbiotic organisms search method for solving large-scale time-cost trade-off problem in construction scheduling. Expert Systems with Applications, 148, 1–33. https://doi.org/10.1016/j.eswa.2020.113230
Liu, S., Tao, R., & Tam, C. M. (2013). Optimizing cost and CO2 emission for construction projects using particle swarm optimization. Habitat International, 37, 155–162. https://doi.org/10.1016/j.habitatint.2011.12.012
Lotfi, A., Dorra, A., Kaddour, B., & Abdessamad, K. (2014). Fuzzy goal programming to optimization the multi-objective problem. International Journal of Applied Mathematics and Statistics, 2(1), 14–19. https://doi.org/10.11648/j.sjams.20140201.12
Lotfi, R., Mardani, N., & Weber, G. W. (2021). Robust bi-level programming for renewable energy location. International Journal of Energy Research, 45(5), 7521–7534. https://doi.org/10.1002/er.6332
Lotfi, R., Mehrjerdi, Y. Z., Pishvaee, M. S., Sadeghieh, A., & Weber, G. W. (2021). A robust optimization model for sustainable and resilient closed-loop supply chain network design considering conditional value at risk. Numerical Algebra, Control and Optimization, 11(2), 221–253. https://doi.org/10.3934/naco.2020023
Lotfi, R., Yadegari, Z., Hosseini, S. H., Khameneh, A. H., Tirkolaee, E. B., & Weber, G. W. (2020). A robust time-cost-quality-energy-environment trade-off with resource-constrained in project management: A case study for a bridge construction project. Journal of Industrial and Management Optimization. https://doi.org/10.3934/jimo.2020158
Luong, D. L., Tran, D. H., & Nguyen, P. T. (2021). Optimizing multi-mode time-cost-quality trade-off of construction project using opposition multiple objective difference evolution. International Journal of Construction Management, 21(3), 271–283. https://doi.org/10.1080/15623599.2018.1526630
Mahdiraji, H. A., Sedigh, M., Hajiagha, S. H. R., Garza-Reyes, J. A., Jafari-Sadeghi, V., & Dana, L. P. (2021). A novel time, cost, quality and risk tradeoff model with a knowledge-based hesitant fuzzy information: An R&D project application. Technological Forecasting and Social Change, 172, 1–13. https://doi.org/10.1016/j.techfore.2021.121068
Mahmoudi, A., & Javed, S. A. (2020). Project scheduling by incorporating potential quality loss cost in time-cost tradeoff problems. Journal of Modelling in Management., 15(3), 1187–1204. https://doi.org/10.1108/JM2-12-2018-0208
Marzouk, M., Madany, M., Abou-Zied, A., & El-said, M. (2008). Handling construction pollutions using multi-objective optimization. Construction Management and Economics, 26(10), 1113–1125. https://doi.org/10.1080/01446190802400779
Mitchell, R. B., Clark, W. C., Cash, D. W., & Dickson, N. M. (Eds.). (2006). Global environmental assessments: information and influence. MIT Press, New York. doi:https://doi.org/10.7551/mitpress/3292.001.0001
Mohammadipour, F., & Sadjadi, S. J. (2016). Project cost-quality-risk tradeoff analysis in a time-constrained problem. Computers and Industrial Engineering, 95, 111–121. https://doi.org/10.1016/j.cie.2016.02.025
Montarroyos, D. C. G., de Alvarez, C. E., & Bragança, L. (2019). Assessing the environmental impacts of construction in Antarctica. Environmental Impact Assessment Review, 79, 1–10. https://doi.org/10.1016/j.eiar.2019.106302
Mungle, S., Benyoucef, L., Son, Y. J., & Tiwari, M. K. (2013). A fuzzy clustering-based genetic algorithm approach for time–cost–quality trade-off problems: A case study of highway construction project. Engineering Applications of Artificial Intelligence, 26(8), 1953–1966. https://doi.org/10.1016/j.engappai.2013.05.006
Nabipoor Afruzi, E., Najafi, A. A., Roghanian, E., & Mazinani, M. (2014). A multi-objective imperialist competitive algorithm for solving discrete time, cost and quality trade-off problems with mode-identify and resource-constrained situations. Computers and Operations Research, 50, 80–96. https://doi.org/10.1016/j.cor.2014.04.003
Nguyen, D. T., Le-Hoai, L., Tarigan, P. B., & Tran, D. H. (2021). Tradeoff time cost quality in repetitive construction project using fuzzy logic approach and symbiotic organism search algorithm. Alexandria Engineering Journal. https://doi.org/10.1016/j.aej.2021.06.058
Ozcan-Deniz, G., & Zhu, Y. (2017). Multi-objective optimization of greenhouse gas emissions in highway construction projects. Sustainable Cities and Society, 28, 162–171. https://doi.org/10.1016/j.scs.2016.09.009
Ozcan-Deniz, G., Zhu, Y., & Ceron, V. (2012). Time, cost, and environmental impact analysis on construction operation optimization using genetic algorithms. Journal of Management in Engineering, 28(3), 265–272. https://doi.org/10.1016/j.scs.2016.09.009
Peche, R., & Rodríguez, E. (2009). Environmental impact assessment procedure: A new approach based on fuzzy logic. Environmental Impact Assessment Review, 29(5), 275–283. https://doi.org/10.1016/j.eiar.2009.01.005
Perlingeiro, R. M., Perlingeiro, M. S. P. L., & Soares, C. A. P. (2021). Criteria for the assessment of sustainability of public constructions. Environment, Development and Sustainability, 23, 15450–15493. https://doi.org/10.1007/s10668-021-01306-2
Razavi Hajiagha, S. H., Mahdiraji, H. A., Behnam, M., Nekoughadirli, B., & Joshi, R. (2021). A scenario-based robust time–cost tradeoff model to handle the effect of COVID-19 on supply chains project management. Operations Management Research. https://doi.org/10.1007/s12063-021-00195-y
Razavi Hajiagha, S. H., Mahdiraji, H. A., & Hashemi, S. S. (2014). A hybrid model of fuzzy goal programming and grey numbers in continuous project time, cost, and quality tradeoff. The International Journal of Advanced Manufacturing Technology, 71(1–4), 117–126. https://doi.org/10.1007/s00170-013-5463-2
Rubin, P. A., & Narasimhan, R. (1984). Fuzzy goal programming with nested priorities. Fuzzy Sets and Systems, 14(2), 115–129. https://doi.org/10.1016/0165-0114(84)90095-2
Sharma, K., & Trivedi, M. K. (2022). AHP and NSGA-II-based time–cost–quality trade-off optimization model for construction projects. In Artificial Intelligence and Sustainable Computing (pp. 45–63). Springer, Singapore. doi:https://doi.org/10.1007/978-981-16-1220-6_5
Shirzadeh Chaleshtarti, A., Shadrokh, S., Khakifirooz, M., Fathi, M., & Pardalos, P. M. (2020). A hybrid genetic and Lagrangian relaxation algorithm for resource-constrained project scheduling under nonrenewable resources. Applied Soft Computing, 94, 1–16. https://doi.org/10.1016/j.asoc.2020.106482
Son, J., Hong, T., & Lee, S. (2013). A mixed (continuous+ discrete) time-cost trade-off model considering four different relationships with lag time. KSCE Journal of Civil Engineering, 17(2), 281–291. https://doi.org/10.1007/s12205-013-1506-3
Subulan, K. (2020). An interval-stochastic programming based approach for a fully uncertain multi-objective and multi-mode resource investment project scheduling problem with an application to ERP project implementation. Expert Systems with Applications, 149, 1–49. https://doi.org/10.1016/j.eswa.2020.113189
Taheri Amiri, M. J., Haghighi, F. R., Eshtehardian, E., & Adessi, O. (2017). Optimization of time, cost and quality in critical chain method using simulated annealing. International Journal of Engineering, 30(5), 627–635.
Taheri Amiri, M. J., Haghighi, F. R., Eshtehardian, E., & Adessi, O. (2018). Multi-project time-cost optimization in critical chain with resource constraints. KSCE Journal of Civil Engineering, 22(10), 3738–3752. https://doi.org/10.1007/s12205-017-0691-x
Tareghian, H. R., & Taheri, S. H. (2006). On the discrete time, cost and quality trade-off problem. Applied Mathematics and Computation, 181(2), 1305–1312. https://doi.org/10.1016/j.amc.2006.02.029
Tavana, M., Abtahi, A. R., & Khalili-Damghani, K. (2014). A new multi-objective multi-mode model for solving preemptive time–cost–quality trade-off project scheduling problems. Expert Systems with Applications, 41(4), 1830–1846. https://doi.org/10.1016/j.eswa.2013.08.081
Tran, D. H. (2020). Optimizing time–cost in generalized construction projects using multiple-objective social group optimization and multi-criteria decision-making methods. Engineering, Construction and Architectural Management, 27(9), 2287–2313. https://doi.org/10.1108/ECAM-08-2019-0412
Van Den Eeckhout, M., Maenhout, B., & Vanhoucke, M. (2019). A heuristic procedure to solve the project staffing problem with discrete time/resource trade-offs and personnel scheduling constraints. Computers and Operations Research, 101, 144–161. https://doi.org/10.1016/j.cor.2018.09.008
Wang, J., Wu, H., Tam, V. W., & Zuo, J. (2019). Considering life-cycle environmental impacts and society’s willingness for optimizing construction and demolition waste management fee: An empirical study of China. Journal of Cleaner Production, 206, 1004–1014. https://doi.org/10.1080/09640568.2017.1399110
Wang, W. (2021). The concept of sustainable construction project management in international practice. Environment, Development and Sustainability. https://doi.org/10.1007/s10668-021-01333-z
Wei, H., Su, Z., & Zhang, Y. (2020). Preprocessing the discrete time-cost tradeoff problem with generalized precedence relations. Mathematical Problems in Engineering, 2020, 1–19. https://doi.org/10.1155/2020/6312198
Xu, J., Zheng, H., Zeng, Z., Wu, S., & Shen, M. (2012). Discrete time–cost–environment trade-off problem for large-scale construction systems with multiple modes under fuzzy uncertainty and its application to Jinping-II Hydroelectric Project. International Journal of Project Management, 30(8), 950–966. https://doi.org/10.1016/j.ijproman.2012.01.019
Yusof, N. A., Abidin, N. Z., Zailani, S. H. M., Govindan, K., & Iranmanesh, M. (2016). Linking the environmental practice of construction firms and the environmental behaviour of practitioners in construction projects. Journal of Cleaner Production, 121, 64–71. https://doi.org/10.1016/j.jclepro.2016.01.090
Zaman, F., Elsayed, S., Sarker, R., & Essam, D. (2020). Hybrid evolutionary algorithm for large-scale project scheduling problems. Computers and Industrial Engineering, 146, 1–32. https://doi.org/10.1016/j.cie.2020.106567
Zhang, Z., & Zhong, X. (2018). Time/resource trade-off in the robust optimization of resource-constraint project scheduling problem under uncertainty. Journal of Industrial and Production Engineering, 35(4), 243–254. https://doi.org/10.1080/21681015.2018.1451400
Zhu, L., Lin, J., & Wang, Z. J. (2019). A discrete oppositional multi-verse optimization algorithm for multi-skill resource constrained project scheduling problem. Applied Soft Computing, 85, 1–11. https://doi.org/10.1016/j.asoc.2019.105805
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Project data
Appendix: Project data
N | Activity | Weight | Execution mode | Resources | Time | Cost | Quality | Environmental impacts | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
Cement | Skilled worker | Worker | Excavator | ||||||||
1 | Equipping the workshop | 0.011 | 1 | 0 | 0 | 2 | 0 | 2 | $1000 | 0.80 | 0.30 |
2 | Staking and excavating the trench | 0.053 | 1 | 0 | 0 | 3 | 1 | 14 | $1260 | 0.78 | 0.36 |
2 | 0 | 0 | 7 | 1 | 10 | $1220 | 0.80 | 0.44 | |||
3 | 0 | 0 | 5 | 2 | 8 | $1376 | 0.83 | 0.64 | |||
4 | 0 | 0 | 10 | 1 | 7 | $1022 | 0.82 | 0.44 | |||
5 | 0 | 0 | 7 | 1 | 12 | $1464 | 0.84 | 0.52 | |||
6 | 0 | 0 | 5 | 2 | 10 | $1720 | 0.87 | 0.64 | |||
7 | 0 | 0 | 10 | 1 | 10 | $1460 | 0.88 | 0.48 | |||
3 | Stringing the pipes | 0.105 | 1 | 0 | 0 | 2 | 0 | 25 | $400 | 0.74 | 0.20 |
2 | 0 | 0 | 5 | 0 | 20 | $800 | 0.80 | 0.30 | |||
3 | 0 | 0 | 7 | 0 | 16 | $896 | 0.83 | 0.40 | |||
4 | 0 | 0 | 10 | 0 | 12 | $960 | 0.90 | 0.50 | |||
5 | 0 | 0 | 5 | 0 | 22 | $880 | 0.82 | 0.40 | |||
6 | 0 | 0 | 7 | 0 | 18 | $1,008 | 0.85 | 0.50 | |||
7 | 0 | 0 | 10 | 0 | 14 | $1,120 | 0.92 | 0.50 | |||
4 | Levelling and grading the trench bottom | 0.021 | 1 | 0 | 0 | 4 | 0 | 5 | $160 | 0.77 | 0.27 |
2 | 0 | 0 | 7 | 0 | 4 | $224 | 0.80 | 0.40 | |||
3 | 0 | 0 | 10 | 0 | 3 | $240 | 0.83 | 0.47 | |||
4 | 0 | 0 | 13 | 0 | 2 | $208 | 0.86 | 0.53 | |||
5 | 0 | 0 | 7 | 0 | 5 | $280 | 0.85 | 0.40 | |||
6 | 0 | 0 | 10 | 0 | 4 | $320 | 0.88 | 0.53 | |||
7 | 0 | 0 | 13 | 0 | 3 | $312 | 0.90 | 0.53 | |||
5 | Welding the pipes and lowering them into the trench | 0.016 | 1 | 0 | 1 | 3 | 1 | 5 | $570 | 0.76 | 0.45 |
2 | 0 | 2 | 3 | 1 | 3 | $414 | 0.80 | 0.60 | |||
3 | 0 | 1 | 4 | 1 | 4 | $488 | 0.75 | 0.45 | |||
4 | 0 | 2 | 5 | 1 | 2 | $308 | 0.85 | 0.60 | |||
5 | 0 | 2 | 3 | 1 | 4 | $552 | 0.86 | 0.60 | |||
6 | 0 | 1 | 4 | 1 | 5 | $610 | 0.82 | 0.45 | |||
7 | 0 | 2 | 5 | 1 | 3 | $462 | 0.92 | 0.60 | |||
6 | Pipe laying and sieving operation | 0.105 | 1 | 0 | 0 | 4 | 0 | 22 | $704 | 0.78 | 0.30 |
2 | 0 | 0 | 5 | 0 | 20 | $800 | 0.80 | 0.40 | |||
3 | 0 | 0 | 6 | 0 | 17 | $816 | 0.81 | 0.50 | |||
4 | 0 | 0 | 7 | 0 | 15 | $840 | 0.82 | 0.60 | |||
5 | 0 | 0 | 5 | 0 | 22 | $880 | 0.82 | 0.40 | |||
6 | 0 | 0 | 6 | 0 | 19 | $912 | 0.83 | 0.60 | |||
7 | 0 | 0 | 7 | 0 | 17 | $952 | 0.84 | 0.60 | |||
7 | Testing | 0.037 | 1 | 0 | 0 | 1 | 0 | 11 | $88 | 0.82 | 0.40 |
2 | 0 | 0 | 2 | 0 | 7 | $112 | 0.80 | 0.50 | |||
3 | 0 | 0 | 3 | 0 | 4 | $96 | 0.81 | 0.50 | |||
4 | 0 | 0 | 4 | 0 | 2 | $64 | 0.84 | 0.60 | |||
5 | 0 | 0 | 2 | 0 | 8 | $128 | 0.83 | 0.50 | |||
6 | 0 | 0 | 3 | 0 | 5 | $120 | 0.83 | 0.60 | |||
7 | 0 | 0 | 4 | 0 | 3 | $96 | 0.87 | 0.60 | |||
8 | Backfilling | 0.079 | 1 | 0 | 0 | 8 | 0 | 19 | $1216 | 0.82 | 0.30 |
2 | 0 | 0 | 10 | 0 | 15 | $1200 | 0.80 | 0.35 | |||
3 | 0 | 0 | 6 | 1 | 6 | $684 | 0.74 | 0.50 | |||
4 | 0 | 0 | 8 | 1 | 5 | $650 | 0.76 | 0.50 | |||
5 | 0 | 0 | 10 | 0 | 16 | $1,280 | 0.81 | 0.30 | |||
6 | 0 | 0 | 6 | 1 | 7 | $798 | 0.75 | 0.44 | |||
7 | 0 | 0 | 8 | 1 | 6 | $780 | 0.77 | 0.44 | |||
9 | Levelling and grading of the reservoir bottom | 0.032 | 1 | 0 | 0 | 7 | 0 | 7 | $392 | 0.84 | 0.27 |
2 | 0 | 0 | 4 | 1 | 6 | $588 | 0.80 | 0.55 | |||
3 | 0 | 0 | 10 | 0 | 3 | $240 | 0.85 | 0.33 | |||
4 | 0 | 0 | 5 | 2 | 3 | $516 | 0.87 | 0.65 | |||
5 | 0 | 0 | 4 | 1 | 7 | $686 | 0.83 | 0.60 | |||
6 | 0 | 0 | 10 | 0 | 4 | $320 | 0.88 | 0.33 | |||
7 | 0 | 0 | 5 | 2 | 4 | $688 | 0.90 | 0.64 | |||
10 | Excavating the route | 0.047 | 1 | 0 | 0 | 3 | 1 | 13 | $1170 | 0.78 | 0.36 |
2 | 0 | 0 | 7 | 1 | 9 | $1098 | 0.80 | 0.44 | |||
3 | 0 | 0 | 5 | 2 | 8 | $1376 | 0.85 | 0.64 | |||
4 | 0 | 0 | 10 | 1 | 7 | $1022 | 0.83 | 0.44 | |||
5 | 0 | 0 | 7 | 1 | 10 | $1220 | 0.82 | 0.52 | |||
6 | 0 | 0 | 5 | 2 | 9 | $1548 | 0.87 | 0.64 | |||
7 | 0 | 0 | 10 | 1 | 8 | $1168 | 0.85 | 0.48 | |||
11 | Excavating and digging the reservoir foundation | 0.032 | 1 | 0 | 0 | 3 | 0 | 8 | $192 | 0.82 | 0.20 |
2 | 0 | 0 | 4 | 0 | 6 | $192 | 0.80 | 0.40 | |||
3 | 0 | 0 | 5 | 0 | 4 | $160 | 0.78 | 0.33 | |||
4 | 0 | 0 | 6 | 0 | 2 | $96 | 0.76 | 0.47 | |||
5 | 0 | 0 | 4 | 0 | 7 | $224 | 0.83 | 0.33 | |||
6 | 0 | 0 | 5 | 0 | 5 | $200 | 0.81 | 0.40 | |||
7 | 0 | 0 | 6 | 0 | 3 | $144 | 0.79 | 0.47 | |||
12 | Lean concrete | 0.011 | 1 | 150 | 0 | 1 | 0 | 4 | $80 | 0.88 | 0.35 |
2 | 170 | 0 | 2 | 0 | 2 | $59 | 0.80 | 0.45 | |||
3 | 175 | 0 | 2 | 0 | 2 | $60 | 0.80 | 0.45 | |||
4 | 175 | 0 | 3 | 0 | 1 | $38 | 0.80 | 0.45 | |||
5 | 170 | 0 | 2 | 0 | 3 | $89 | 0.90 | 0.45 | |||
6 | 175 | 0 | 2 | 0 | 3 | $90 | 0.90 | 0.45 | |||
7 | 175 | 0 | 3 | 0 | 2 | $76 | 0.89 | 0.45 | |||
13 | Supply, fabrication, and installation of rebar, and placing concrete at the bottom | 0.105 | 1 | 0 | 3 | 4 | 0 | 22 | $2288 | 0.79 | 0.33 |
2 | 0 | 4 | 3 | 0 | 20 | $2400 | 0.80 | 0.33 | |||
3 | 0 | 3 | 6 | 0 | 20 | $2400 | 0.89 | 0.40 | |||
4 | 0 | 6 | 3 | 0 | 17 | $2856 | 0.94 | 0.40 | |||
5 | 0 | 4 | 3 | 0 | 22 | $2640 | 0.82 | 0.33 | |||
6 | 0 | 3 | 6 | 0 | 22 | $2640 | 0.91 | 0.40 | |||
7 | 0 | 6 | 3 | 0 | 19 | $3192 | 0.96 | 0.40 | |||
14 | Shuttering and installation of rebar for walls and ceiling | 0.126 | 1 | 0 | 3 | 8 | 0 | 26 | $3536 | 0.76 | 0.40 |
2 | 0 | 4 | 7 | 0 | 24 | $3648 | 0.80 | 0.40 | |||
3 | 0 | 3 | 10 | 0 | 23 | $3496 | 0.78 | 0.47 | |||
4 | 0 | 5 | 7 | 0 | 22 | $3872 | 0.87 | 0.40 | |||
5 | 0 | 4 | 7 | 0 | 25 | $3800 | 0.81 | 0.40 | |||
6 | 0 | 3 | 10 | 0 | 24 | $3648 | 0.79 | 0.40 | |||
7 | 0 | 5 | 7 | 0 | 23 | $4048 | 0.88 | 0.40 | |||
15 | Walls and ceiling concrete placing | 0.026 | 1 | 310 | 0 | 4 | 0 | 6 | $341 | 0.81 | 0.47 |
2 | 370 | 0 | 4 | 0 | 5 | $308 | 0.80 | 0.53 | |||
3 | 375 | 0 | 6 | 0 | 3 | $234 | 0.81 | 0.53 | |||
4 | 310 | 0 | 7 | 0 | 2 | $162 | 0.79 | 0.53 | |||
5 | 370 | 0 | 4 | 0 | 6 | $370 | 0.84 | 0.53 | |||
6 | 375 | 0 | 6 | 0 | 4 | $312 | 0.85 | 0.53 | |||
7 | 310 | 0 | 7 | 0 | 3 | $242 | 0.83 | 0.47 | |||
16 | Excavation of manhole | 0.021 | 1 | 0 | 0 | 4 | 0 | 6 | $192 | 0.82 | 0.20 |
2 | 0 | 0 | 7 | 0 | 4 | $224 | 0.80 | 0.20 | |||
3 | 0 | 0 | 3 | 1 | 3 | $270 | 0.77 | 0.48 | |||
4 | 0 | 0 | 5 | 1 | 2 | $212 | 0.77 | 0.48 | |||
5 | 0 | 0 | 7 | 0 | 5 | $280 | 0.85 | 0.20 | |||
6 | 0 | 0 | 3 | 1 | 4 | $360 | 0.82 | 0.48 | |||
7 | 0 | 0 | 5 | 1 | 3 | $318 | 0.82 | 0.48 | |||
17 | Brickwork of manhole | 0.016 | 1 | 0 | 0 | 3 | 0 | 6 | $144 | 0.90 | 0.27 |
2 | 0 | 0 | 6 | 0 | 3 | $144 | 0.80 | 0.27 | |||
3 | 0 | 0 | 8 | 0 | 2 | $128 | 0.80 | 0.27 | |||
4 | 0 | 0 | 9 | 0 | 1 | $72 | 0.76 | 0.33 | |||
5 | 0 | 0 | 6 | 0 | 4 | $192 | 0.86 | 0.27 | |||
6 | 0 | 0 | 8 | 0 | 3 | $192 | 0.86 | 0.27 | |||
7 | 0 | 0 | 9 | 0 | 2 | $144 | 0.82 | 0.33 | |||
18 | Pouring concrete slab | 0.016 | 1 | 310 | 0 | 2 | 0 | 5 | $204 | 0.84 | 0.40 |
2 | 370 | 0 | 3 | 0 | 3 | $161 | 0.80 | 0.45 | |||
3 | 375 | 0 | 4 | 0 | 2 | $124 | 0.80 | 0.45 | |||
4 | 310 | 0 | 5 | 0 | 2 | $130 | 0.83 | 0.45 | |||
5 | 370 | 0 | 3 | 0 | 4 | $214 | 0.86 | 0.45 | |||
6 | 375 | 0 | 4 | 0 | 3 | $186 | 0.86 | 0.45 | |||
7 | 310 | 0 | 5 | 0 | 3 | $194 | 0.89 | 0.40 | |||
19 | Excavation of the site | 0.016 | 1 | 0 | 0 | 5 | 0 | 4 | $160 | 0.83 | 0.20 |
2 | 0 | 0 | 6 | 0 | 3 | $144 | 0.80 | 0.33 | |||
3 | 0 | 0 | 7 | 0 | 2 | $112 | 0.77 | 0.33 | |||
4 | 0 | 0 | 8 | 0 | 1 | $64 | 0.73 | 0.47 | |||
5 | 0 | 0 | 6 | 0 | 4 | $192 | 0.86 | 0.33 | |||
6 | 0 | 0 | 7 | 0 | 3 | $168 | 0.83 | 0.40 | |||
7 | 0 | 0 | 8 | 0 | 2 | $128 | 0.80 | 0.47 | |||
20 | Making the steel part | 0.016 | 1 | 0 | 1 | 1 | 0 | 6 | $192 | 0.67 | 0.20 |
2 | 0 | 2 | 1 | 0 | 5 | $280 | 0.80 | 0.30 | |||
3 | 0 | 2 | 2 | 0 | 4 | $256 | 0.94 | 0.30 | |||
4 | 0 | 1 | 3 | 0 | 3 | $144 | 0.91 | 0.20 | |||
5 | 0 | 2 | 1 | 0 | 6 | $336 | 0.84 | 0.30 | |||
6 | 0 | 2 | 2 | 0 | 5 | $320 | 0.98 | 0.30 | |||
7 | 0 | 1 | 3 | 0 | 4 | $192 | 0.95 | 0.20 | |||
21 | Shuttering and concrete placing | 0.016 | 1 | 310 | 1 | 1 | 0 | 5 | $284 | 0.73 | 0.40 |
2 | 370 | 1 | 2 | 0 | 4 | $278 | 0.80 | 0.45 | |||
3 | 375 | 1 | 2 | 0 | 4 | $280 | 0.80 | 0.45 | |||
4 | 310 | 2 | 1 | 0 | 2 | $162 | 0.93 | 0.45 | |||
5 | 370 | 1 | 2 | 0 | 5 | $348 | 0.85 | 0.45 | |||
6 | 375 | 1 | 2 | 0 | 5 | $350 | 0.85 | 0.45 | |||
7 | 310 | 2 | 1 | 0 | 3 | $242 | 0.97 | 0.40 | |||
22 | Painting | 0.026 | 1 | 0 | 0 | 1 | 0 | 7 | $56 | 0.79 | 0.27 |
2 | 0 | 0 | 2 | 0 | 5 | $80 | 0.80 | 0.27 | |||
3 | 0 | 0 | 3 | 0 | 3 | $72 | 0.81 | 0.27 | |||
4 | 0 | 0 | 4 | 0 | 2 | $64 | 0.86 | 0.33 | |||
5 | 0 | 0 | 2 | 0 | 6 | $96 | 0.84 | 0.27 | |||
6 | 0 | 0 | 3 | 0 | 4 | $96 | 0.85 | 0.27 | |||
7 | 0 | 0 | 4 | 0 | 3 | $96 | 0.90 | 0.33 | |||
23 | Placing route signs | 0.026 | 1 | 0 | 0 | 1 | 0 | 7 | $56 | 0.79 | 0.20 |
2 | 0 | 0 | 2 | 0 | 5 | $80 | 0.80 | 0.20 | |||
3 | 0 | 0 | 3 | 0 | 3 | $72 | 0.81 | 0.20 | |||
4 | 0 | 0 | 4 | 0 | 2 | $64 | 0.86 | 0.20 | |||
5 | 0 | 0 | 2 | 0 | 6 | $96 | 0.84 | 0.20 | |||
6 | 0 | 0 | 3 | 0 | 4 | $96 | 0.85 | 0.20 | |||
7 | 0 | 0 | 4 | 0 | 3 | $96 | 0.90 | 0.20 | |||
24 | Reservoir leak testing | 0.032 | 1 | 0 | 0 | 3 | 0 | 8 | $192 | 0.82 | 0.30 |
2 | 0 | 0 | 4 | 0 | 6 | $192 | 0.80 | 0.30 | |||
3 | 0 | 0 | 5 | 0 | 4 | $160 | 0.78 | 0.30 | |||
4 | 0 | 0 | 6 | 0 | 3 | $144 | 0.79 | 0.35 | |||
5 | 0 | 0 | 4 | 0 | 7 | $224 | 0.83 | 0.30 | |||
6 | 0 | 0 | 5 | 0 | 5 | $200 | 0.81 | 0.35 | |||
7 | 0 | 0 | 6 | 0 | 4 | $192 | 0.82 | 0.30 | |||
25 | Rectification of defect and provisional handover | 0.011 | 1 | 0 | 0 | 2 | 0 | 2 | $1000 | 0 | 0.20 |
Rights and permissions
About this article

Cite this article
Ali Banihashemi, S., Khalilzadeh, M. Towards sustainable project scheduling with reducing environmental pollution of projects: fuzzy multi-objective programming approach to a case study of Eastern Iran. Environ Dev Sustain 25, 7737–7767 (2023). https://doi.org/10.1007/s10668-022-02370-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10668-022-02370-y