
Abstract
As an important content in intelligent vehicle technology, the design of lane changing path directly decides the quality of control in autonomous lane changing realization. This paper first summarizes the design principle of existing intelligent vehicle lane changing techniques. Then a novel lane changing path based on the X-Sin function is constructed. The X-Sin function is designed to combine the outstanding smoothness of sine function and the linear characteristic of the constant-speed shift function. With parameters including vehicle velocity, lane width and the maximum lateral acceleration, the proposed design solves the problems in lane changing path including jump point in lane changing path curvature and non-smooth lane changing path. A tracking controller is designed using quadratic optimum control to track the lane changing path. The effectiveness and steadiness of the proposed lane changing path is demonstrated by MATLAB simulation and real-vehicle experiments.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Thanks to the breakthroughs on sensing technologies and internet of things, intelligent vehicles have attracted considerable attentions nowadays [1,2,3]. Lane changing is a kind of basic driving operation after the intelligent vehicle merge into the traffic flow. The prerequisite of intelligent vehicle lane changing is the design of lane changing path [4]. The design of lane changing decides whether the intelligent vehicle can operate safely, smoothly and fast during lane changing process, while the research on lane changing path has great meaning in improving traffic flux, reducing vehicle delay and jam [5]. The purpose of designing lane changing path is to provide a virtual path for the vehicle to transfer safely and smoothly from the current lane to the target lane. Focus of consideration lies on (1) the lateral acceleration of the vehicle when it drives along the designed path must meet with the safe driving condition, and (2) no jump movement on the moving direction of the vehicle is allowed during the lane changing process [6, 7] (Fig. 1).

The lane changing method of the boss intelligent vehicle
The lane changing models for intelligent vehicle mainly are: constant-speed shift lane changing path, circular lane changing path, sine-function lane changing path, etc. During the DAPPA intelligent vehicle contest held in America, the intelligent vehicle ‘Boss’ from the Carnegie Mellon University and the intelligent vehicle ‘Junior’ from the Stanford University had both demonstrated fine autonomous lane changing control ability of their own. The lane changing method of the intelligent vehicle ‘Boss’ was developed based on the car-following state [8]. If the current speed and following distance of the car are not met to the target values, the intelligent vehicle will change the lane under safe conditions. The lane changing method of the ‘Junior’ intelligent vehicle was as follows [9]: (1) when the vehicle runs after a running vehicle, it will not change lane, but to follow the vehicle before it; (2) when the vehicle in the front appears to be an obstacle, the vehicle will first detect the edge of the obstacle vehicle by utilizing A* algorithm and design a path to avoid the obstacle vehicle, then the intelligent vehicle will use its maximum allowed speed to finish lane changing once the path is determined, based on the vehicle’s position error model; (3) the intelligent vehicle will consider returning to its original lane when any driving vehicle in the target lane poses a safety threat to the lane changing process, as shown in Fig. 2.

The lane changing method of the junior intelligent vehicle
Furthermore, the model predictive control (MPC) [10] and nonlinear MPC [11] were used for lane changing control. The adaptive safe-distance lane changing model was developed for intelligent vehicles [12]. In [13], a novel lane changing path was designed based on the sine function by introducing the hyperbolic tangent function. A second-stage design was then conducted by utilizing the fourth-order B sampling interpolation technique. The design showed acceptable results in simulation testing. The lane changing process was considered to have four periods, swing-angle, approaching, angle-enclosure and adjusting in [14]. Three parameters were introduced in the modeling process: front-wheel steering angle, swing-angel duration time and enclosure heading angle. The vehicle movements predicted by the model appears to be a complete match to the lane changing operations in real pilot-drive lane changing process.
This paper proposes a novel lane changing method based on design principle concluded from the combined knowledge of (1) problems in design of lane changing path, such as jump in path curvature at the beginning and the end of the path, the existence of step-wise jump points along the moving direction of the vehicle; (2) several classic problems in free lane changing model research. The proposed model is applied in simulation and experimental testing and has demonstrated expected effect.
2 Design and analytical solution of the lane changing path
Firstly, this paper gives a brief summary to the design principle of lane changing path based on the literature review above:
- 1.
Utilizing the outstanding smoothness of sine function based lane changing path;
- 2.
Utilizing the characteristic of the linear function in constant-speed shift lane changing path, which can demonstrate the ‘approaching’ period proposed in [14] to some extent;
- 3.
Further improve or resolve the condition of step-wise jump in the lateral acceleration along the moving direction of the vehicle.
Secondly, this paper construct lane changing function based on the path of sine function, as shown in Fig. 3. In Fig. 3, a coordinate system is established with the starting point of the lane changing process being its origin, yd and Ld are the lateral displacement and longitudinal displacement of the vehicle in the lane changing process, respectively. The sine function lane changing path and the constant-speed lane changing path are defined as:

Sine function lane changing path
Combining the feature of the two methods, this paper construct a novel lane changing function called X-Sin as:
where amax is the maximum lateral acceleration and amax = V2Kmax. And Kmax is the maximum of the lane changing path curvature which can be calculated as
The first-order derivative and the second-order derivative of are Y(x), as shown in Fig. 4:

X-Sin function lane changing path
Therefore, the X-Sin lane changing function constructed in this paper has the following characteristic: (1). The X-Sin lane changing function and its first-order and second-order derivatives are all continuous and differentiable; (2). The X-Sin function has limits in the boundary of \( \;x \in [0,L_{d} ] \) where \( \dot{Y}(0) = 0 \) and \( \ddot{Y}(L_{d} ) = 0 \); (3). The path is smooth and has no sharp or jump point, as shown in Fig. 4. Besides, the X-Sin lane changing path has advantage in two aspects:
- 1.
Solved the problem of the nonzero curvature at the terminal points of the lane changing path. Avoided the trouble brought up by second-stage design. In [14] and [15], the methods proposed had second-stage design on the sine function path using third-order B sampling interpolation function and had the problem of zero-point at the terminal points of the lane changing path.
- 2.
Near the point \( x = L_{d} /2 \), the X-Sin lane changing function basically expressed the characteristic of linear function, demonstrated the approaching process during lane changing process which is consistent with the intent of lane changing function design.
3 Tracking control of lane changing path
3.1 Vehicle position error model
This paper uses N as vehicle datum point and its pre-aiming point Nc (a point on the lane changing path) as reference point, as shown in Fig. 5. Define the vehicle’s true position vector P(t) as:
where ϕ(t) is the heading angle and y(t) is the lateral displacement.

Schematic of vehicle position error
Then, the error between the vehicle’s true position and reference position can be expressed by Pe:
As the heading angle ϕ(t) of the vehicle during lane changing process is normally less than \( {\pi \mathord{\left/ {\vphantom {\pi 6}} \right. \kern-0pt} 6} \), eϕ ≈ sin(eϕ), we can get:
Establish the vehicle position error model as follows:
where vN is the velocity of the vehicle, d is the axle-base between the front-wheel and the rear-wheel. The equation can be rewritten in a generic way as:
where \( {\mathbf{X}}{ = }\left[ \begin{aligned} e_{l} \hfill \\ e_{\phi } \hfill \\ \end{aligned} \right],A = \left[ {\begin{array}{*{20}c} 0 & {v_{N} } \\ 0 & 0 \\ \end{array} } \right],B = \left[ \begin{aligned} - v_{N} \hfill \\ \frac{{v_{N} }}{d} \hfill \\ \end{aligned} \right],{\mathbf{U}} = \tan \phi (t) \)
3.2 Tracking controller
Based on the generic expression of the vehicle’s position error model, set the cost function as:
And the optimum gain of control is:
where \( K^{*} = R^{ - 1} B^{T} P \) and P is the orthogonal symmetrical solution of the following Riccati equation.
Here we define
Substitute Q, R and P into Eq. (10) and get:
Since matrix P is a symmetric matrix, p12 = p21. Re-arrange Eq. (12) and get the solving equations for P as:
4 Free lane changing control simulation and experiments
To validate the effectiveness of the proposed X-Sin lane changing path function and the tracking ability of the designed controller, MATLAB simulation and real-vehicle lane changing experiment were conducted.
4.1 X-Sin lane changing model simulation
Since the velocity of the intelligent vehicle is constantly varying when the vehicle actually merges into traffic on highway, the value of \( L_{d} \) is indefinite. In order to ensure the safety of the vehicle during high-speed driving, amax of the vehicle is limited within 1 m/s2 in this research. Figure 6 shows the relationship between the longitudinal distance of the intelligent vehicle, Ld, and the vehicle’s velocity, V, the maximum lateral acceleration, amax.

X-Sin lane change path function characteristic
Suppose the current velocity is 50 km/h, i.e., V ≈ 13.89 m/s. Referring to the GB standard, set \( y_{d} \) to 3.75 m. Substitute the quantities into Eq. (2) and get Ld ≈ 67.42 m,td ≈ 4.85 s. Meanwhile, assuming that V = 25 m/s, set Ld = 100 m, we can obtain that the maximum lateral acceleration during lane changing is about 0.147 g, and it is in accord with the requirements of the simulation test in the literature [10], and the tracking at the beginning of the lane change trajectory is smooth, and with no curvature mutation. Let the vehicle velocity varies between 50 km/h and 20 km/h, the required longitudinal distance for lane changing of that velocity range is shown in Table 1.
4.2 Tracking control simulation
Set the initial state of the vehicle as [y(0), ϕ(t)] = [0.2, 0], reference velocity as 25 m/s, position error [ye, ϕe] = [0.5, 0]. Based on the proposed X-Sin Lane Changing path function, the effect of designed tracking controller is shown in Fig. 7. Figure 7a is a comparison of the expected lane changing path and the true lane changing path. Figure 7b shows the variation of the expected heading angle and the true heading angle. Figure 7c demonstrates the relationship between the lateral displacement, the longitudinal displacement and the heading angle during the lane changing tracking process.

X-Sin lane changing tracking control diagram
It can be observed from Fig. 7 that the proposed tracking controller has fast and steady tracking ability. The intelligent vehicle achieves the tracking effect of the X-Sin lane changing path with the help of this controller, which provides a good simulation-basis for real-vehicle experimental testing.
4.3 Real-vehicle experimental testing
The JJUV-3 Intelligent Vehicle developed by Army Military Transportation University is used as the real-vehicle testing platform in the experiment of this paper. Regarding the hardware components, the JJUV-3 uses three industrial control machines as its core and it also consists three cameras, three single-line laser radar, one four-line laser radar, one MMW radar, one GPS/inertial-guidance and related shifting, accelerating, braking executors. The VS2008 C# is adopted to develop the vehicle’s decision controlling platform and it is shown in Fig. 8.

JJUV-3 intelligent vehicle platform
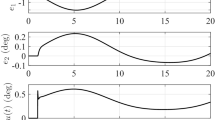
Two X-Sin lane changing control experiments with average speed of 22 and 37.55 km/h were conducted, as shown in Fig. 9. The lateral displacement (relative to pre-aiming point) and the heading angle are provided by visual information. The Cartesian coordinate constructed using this information and the driving distance can well describe the true lane changing path of the vehicle. After multiple time experiments and data recording, the intelligent vehicle’s lane changing path and driving state transition are shown in Fig. 10 and Fig. 11, respectively.

Lane changing experiments

X-sin lane changing tracking control experimental results in 22 km/h average speed experiment

X-sin lane changing tracking control experimental results in 35 km/h average speed experiment
It can be observed from Figs. 10 and 11 that the true lateral displacement and the expected lateral displacement of the intelligent vehicle during X-Sin function lane changing control almost match. When the average velocity is 22 km/h, the error of the lateral displacement is within 0.1 m. When the average velocity is 37.55 km/h, the error of lateral displacement is within 0.4 m. Those results indicate that the tracking controller designed above is basically reliable. Besides, it can be observed from vehicle driving state variation curve, its trend is almost consistent with the X-Sin function curve: (1) the longitudinal in the vehicle driving state variation curve almost increases linearly with time; (2) The heading angle can almost reflect the vehicle’s position variation during the lane changing process that it increases slowly first and then decreases slowly. Some points in the figures with large shift in magnitude are the error-detection points in visual data processing and they can be neglected in experimental analysis. Table 2 compares the intelligent vehicle’s true longitudinal lane changing distance and its expected longitudinal lane changing distance under difference driving velocities.
Comparing Tables 1 and 2, it can be concluded that the true longitudinal distance, the expected distance and the distance calculated by the model for intelligent vehicle lane changing are almost consistent. However, experimental error over 5% exists in some of the experiments due to the varying vehicle velocity during the lane changing processes.
5 Conclusions
This paper proposes a novel lane changing path based on the X-Sin function which is designed based on sine-function lane changing path by introducing linear constraints. The required longitudinal distance \( L_{d} \), for lane changing is calculated using the vehicle velocity \( V \), the maximum lateral acceleration \( a_{\hbox{max} } \) and the width of road \( y_{d} \). The proposed lane changing path not only ensures that the lane changing path is smooth and free of jump in curvature, but also improves the adaptivity in lane changing path construction. The controller designed based on the quadratic form optimum control realized fast and steady lane changing path tracking. The effectiveness and the steadiness of the lane changing path function and its tracking controller are validated by MATLAB simulation and real-vehicle experiments. Further research will be focused on solving the lane changing path optimization and robust-control under the condition that the lane has an obvious curvature.
References
Tian, Z., Liu, F., Li, Z., et al.: The development of key technologies in applications of vessels connected to the internet. Symmetry 9(10), 211 (2017)
He, W., Li, Z., Malekian, R., et al.: An internet of things approach for extracting featured data using AIS database: an application based on the viewpoint of connected ships. Symmetry 9(9), 186 (2017)
Ma, Y., Li, Z., Li, Y., et al.: Driving style estimation by fusingmultiple driving behaviors: a case study of freeway in China. Clust. Comput. (2018). https://doi.org/10.1007/s10586-018-1739-5
Wang, R.B., You, F., Cui, G.J., et al.: Analysis on lane-changing safety of vehicle. J. Jilin Univ. 35(2), 179–0182 (2005)
Daganzo, C.F.: A behavioral theory of multi-lane traffic flow. Part I: long homogeneous freeway sections. Transp. Res. Part B 36(2), 131–158 (1999)
Monteil, J., Nantes, A., Billot, R., et al.: Microscopic cooperative traffic flow: calibration and simulation based on a next generation simulation dataset. IET Intell. Transport Syst. 8(6), 519–525 (2014)
Rucco, A., Notarstefano, G., Hauser, J.: Optimal control based dynamics exploration of a rigid car with longitudinal load transfer. IEEE Trans. Control Syst. Technol. 22(3), 1070–1077 (2014)
Urmson, C., Anhalt, J., Bagnell, D., et al.: Autonomous driving in urban environments: boss and the urban challenge. J. Field Robot. 25(8), 425–466 (2008)
Montemerlo, M., Becker, J., Bhat, S., et al.: Junior: the stanford entry in the Urban Challenge. J. Field Robot. 25(9), 569–597 (2008)
Zheng, H., Huang, Z., Wu, C., et al.: Model predictive control for intelligent vehicle lane change. In: International Conference on Transportation Information and Safety, pp. 265–276 (2013)
Acosta, A.F., Márquez, A., Espinosa, J.: Nonlinear model predictive control of a passenger vehicle for lane changes considering vehicles in the target lane. In: Latin American Conference on Automatic Control (2016)
Deaibi, I.B.A, Schmidt, K.W.: Performing safe and efficient lane changes in dense vehicle traffic. In: Engineering and Technology Symposium (2015)
Li, W., Gao, D.Z., Duan, J.M.: Research on lane change model for intelligent vehicles. J. Highw. Transp. Res. Dev. 27(2), 119–123 (2010)
Yang, J.G., Wang, J.M., Li, Q.F., et al.: Behavior analysis and modeling of lane change in traffic micro-simulation. J. Highw. Transp. Res. Dev. 21(11), 93–97 (2004)
Kang, C.M., Gu, Y.S., Jeon, S.J., et al.: Lateral control system for autonomous lane change system on highways. Les Cahiers Nantais 9(2), 111–115 (2016)
Acknowledgement
The work is supported by the Tianjin Municipal Science and Technology Innovation Platform Project (16PTGCCX00150), the Tianjin Natural Science Foundation (16JCZDJC38200), the National Natural Science Foundation of China (61503284, 51408417, 51505475), Yingcai project of CUMT (YC2017001), UOW VC Postdoctoral Fellowship and PAPD.
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Zhang, R., Zhang, Z., Guan, Z. et al. Autonomous lane changing control for intelligent vehicles. Cluster Comput 22 (Suppl 4), 8657–8667 (2019). https://doi.org/10.1007/s10586-018-1936-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10586-018-1936-2