
Abstract
The Joint Urban 2003 (JU 2003) experimental campaign took place in downtown Oklahoma City, Oklahoma, USA, comprising both continuous and puff releases of sulphur hexafluoride (SF6) tracer gas. In the framework of the UDINEE project, intensive operation period 8 (IOP 8) conducted during the night is simulated using the Parallel-Micro-SWIFT-SPRAY (PMSS) three-dimensional modelling system. The PMSS modelling system is the assembly of a diagnostic or momentum flow solver (PSWIFT) and a Lagrangian particle dispersion model (PSPRAY) accounting for buildings and developed in parallel versions. A sensitivity study is performed regarding the flow modelling options, namely the meteorological data input, the characteristics of the turbulence, and the use of the diagnostic or momentum solver. Results shed light onto issues related to modelling puff releases in a built-up environment. Flow and concentration results are compared to measurements at the sample locations in IOP 8 and statistical metrics computed for all puffs released during IOP 8. These indicators illustrate satisfactory performance and robustness of the PMSS system with reference to the modelling options. Moreover, with moderate computational times and reliable predictions, the PMSS modelling system proves to be relevant for emergency response in cases of atmospheric release of hazardous materials.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Releases of noxious gases or fine particles into the atmosphere are common in many types of accidents or in cases of malicious action or terrorist attack. Industrial sites and urban districts are the most likely places for these events to occur, since they are both densely built-up and highly populated. The most severe health effects of toxic releases are feared at small distances from the source of emission. At such local scales, the airflow and dispersion not only depend on the meteorological conditions above the built-up area, but are significantly influenced by the obstacles. Atmospheric dispersion models are thus needed to satisfactorily account for the effects of the three-dimensional (3D) building geometries.
Atmospheric dispersion models have made tremendous progress in realistically and accurately simulating and predicting the dispersion of airborne hazardous materials in built-up environments. Nowadays, first responders increasingly acknowledge the potential of modelling to quickly evaluate the impact of hazardous substances on human health and the environment. The timeliness and reliability of the computations are essential conditions for implementing the models in decision-support systems devoted to emergency preparedness and response. Thus, developers and end users of atmospheric dispersion models have a common interest in assessing the performance of models that could be operated in an emergency (Armand et al. 2015).
Most of the fast-response systems dedicated to dispersion in built-up areas rely on modified Gaussian models. For example, ADMS-Urban (McHugh et al. 1997), PRIME (Schulman et al. 2000), SCIPUFF (Sykes et al. 2000) and the dispersion model tested by Hanna and Baja (2009) use simplified flow formulations in the urban canopy and concentration analytical solutions with assumptions about the initial size of the plume and increased turbulence due to the urban environment. Gaussian puff dispersion above the urban canopy may also be coupled with the solving of a transport equation in the street network (Soulhac et al. 2011, 2016). The urbanized Gaussian models provide results in a short time and are able to account for the effects of individual buildings on dispersion. However, urbanized Gaussian models hardly apply to the unsteady flow in and above the urban canopy and the distorted concentration pattern in-between buildings.
In contrast to simplified models, computational fluid dynamics (CFD) models provide reference solutions by solving the Navier–Stokes equations, thus properly accounting for complex flows in built-up configurations. CFD models are categorized into two types: Reynolds-averaged Navier–Stokes (RANS) and large-eddy simulation (LES), according to the range of spatio–temporal scales that are resolved or modelled (Patnaik et al. 2003; Camelli et al. 2004; Gowardhan et al. 2011). While CFD models often succeed in accurately describing urban flow and dispersion (see, for instance, Hanna et al. 2006), RANS models and, LES models even so, require very long computational times, making them unsuitable for operational use.
To strike a balance between model speed and accuracy, a trade-off is needed in the resolution of urban flow. Röckle (1990) originally suggested such an approach, using mass-consistency in combination with local wind observations to solve for the mean flow. This approach is applied on domains of size ranging from a few hundred metres to several kilometres, within which the 3D building geometries are defined (with a resolution of about 2–5 m). Vortex flow structures are analytically defined behind, over, around, and between buildings and in street canyons, and then a mass balance scheme is applied. Kaplan and Dinar (1996) derived such an operational urban flow and dispersion model for the first time. Afterwards, the basic model was modified by introducing new flow structures derived from more recent urban tracer studies and wind- and water-tunnel experiments and coupled with mass consistency algorithms to generate detailed flow fields in the urban environment within a matter of minutes (Brown and Williams 1998; Hanna et al. 2011).
Lagrangian particle dispersion models are often associated with diagnostic wind models as they also represent a compromise between simplified Gaussian models and expensive CFD models. The mean motion and diffusion of the Lagrangian computational particles are determined, respectively, by the local wind field and the turbulent velocities obtained from Lagrangian stochastic differential equations reproducing the turbulent flow. In this respect, the Micro-SWIFT-SPRAY (MSS) (Tinarelli et al. 2007) modelling system, and its parallel version (Oldrini et al. 2017), Parallel-Micro-SWIFT-SPRAY (PMSS), have been developed with the aim at providing a simplified but rigorous solution of the flow and dispersion in industrial or urban environments in a short amount of time.
The Urban Dispersion INternational Evaluation Exercise (UDINEE) is another challenging opportunity to validate the PMSS modelling system. The UDINEE project was launched in 2014 by the European Commission/Directorate General Joint Research Centre in association with the US Defense Threat Reduction Agency and major European institutional research centres having teams dedicated to airborne hazards. The aim of the UDINEE project is the evaluation of atmospheric dispersion models that could be used in decision-support systems following radiological dispersal device (RDD) events. European and North American models were benchmarked and compared against the puff releases conducted during the Joint Urban 2003 (JU 2003) urban field experiment (Allwine et al. 2004; Clawson et al. 2005; Allwine and Flaherty 2006). Our study thoroughly analyzes numerical results of the PMSS modelling system obtained using different configurations of this system in the framework of the UDINEE exercise. The dispersion of the four puff releases that comprised the JU2003 IOP 8 field experiment is simulated in order to assess the performance of the PMSS modelling system in a complex configuration due not only to the urban environment but also to the intrinsic nature of puff releases, as explained below.
The paper is organized in five parts: Sect. 2 contains a brief description of the PSWIFT and PSPRAY models, and Sect. 3 summarizes the JU2003 experimental data and modelling set-up. Section 4 presents and comments on the results of the simulations pointing out the differences in the flow and dispersion computed using the basic diagnostic flow model and the newly-developed Navier–Stokes solver in the PMSS modeling system. Section 5 draws conclusions on the potential use of the PMSS model for emergency preparedness and response in the case of an atmospheric release.
2 Presentation of the PMSS Modelling System
The PMSS modelling system (Oldrini et al. 2011, 2017) is the parallelized version of the MSS modelling system (Tinarelli et al. 2007, 2013). The PMSS flow and dispersion modelling system constitutes the individual PSWIFT and PSPRAY models, both used in small-scale urban mode. In recent years, the MSS modelling system has been parallelized and improved in terms of numerical model parametrizations with a focus towards risk assessment and operational handling in built-up areas. The message passing interface (MPI) parallelization technique was chosen as it allows the PMSS modelling system to share computation on multi-cores located either in the same computer or in numerous nodes linked by a high-speed network in supercomputer centres.
The PMSS modelling system can be used in downscaling mode where a calculation is performed from the mesoscale down to the urban local scale using multiple nested domains with increasingly higher spatial resolutions. Both meteorological and turbulence data are downscaled using PSWIFT, while PSPRAY computes the transport and dispersion over the nested domains. Validation of the PMSS modelling system has been performed on a variety of test cases, ranging from academic cubes to COST Action ES1006 (Baumann-Stantzer et al. 2015). In this paper, we introduce the validation of the PMSS modelling system against the JU2003 field experiment in the case of puff releases. Details of the latest versions of the PMSS modelling system can be found in Oldrini et al. (2017), and hereafter only the main features of the PSWIFT and PSPRAY models are summarized.
2.1 PSWIFT Flow Model
The PSWIFT model (Tinarelli et al. 2007; Oldrini et al. 2011) is a mass-consistent 3D diagnostic model using analytical relationships for the flow velocity around any buildings that are present and can handle a complex built-up terrain using terrain-following coordinates. The model produces diagnostic wind velocity, turbulence, temperature, and humidity fields.
A PSWIFT model calculation of the flow is performed using three sequential steps:
-
1.
A first guess of the flow is derived from heterogeneous meteorological input data, a mixture of surface and profile measurements, and possibly mesoscale model outputs.
-
2.
The first guess is modified in the zones where the flow is influenced by isolated buildings or groups of buildings.
-
3.
The mass consistency, with an impermeability condition on the ground and building surfaces, is obtained by minimizing the difference, over the volume of the domain, to the flow of step 2 under the mass conservation constraint.
From 2014 onwards, a RANS solver was introduced into the PSWIFT model (Oldrini et al. 2014, 2016) and it can be used optionally after step 3 described above. The RANS solver has been developed in order to simulate more accurate velocity and pressure fields in built-up environments than those obtained with the diagnostic flow model. A typical application computes a realistic surface pressure field on facades to evaluate infiltration inside the buildings. The momentum equation has been implemented in the PSWIFT model with a constraint that keeps the computational time low. Following Gowardhan et al. (2011), the continuity equation is modified using the artificial compressibility method. While the flow is known to be incompressible, the mass conservation equation is written as if the flow were compressible with a time derivative of the pressure and a parameter corresponding to an artificial speed for the pressure waves. During transient steps, incompressibility is not verified but when the pressure reaches steady state, the time derivative of the pressure vanishes and the artificial compressibility equation reduces to the continuity equation. In the momentum equation, the turbulent Reynolds stress tensor is modelled by a zero-order closure based on mixing-length theory, and the momentum and pressure equations are solved using a fractional timestep technique. The momentum version of the PSWIFT model has been validated on a series of academic test cases such as the rectangular building from the CEDVAL (Compilation of Experimental Data for VALidation of micro-scale dispersion models) online wind-tunnel database of Hamburg University (Oldrini et al. 2017). The quality of the wind and pressure fields tends to be similar to more general CFD codes with the advantage of a short computational time.
The PSWIFT model is also able to diagnose the turbulence, namely, the turbulent kinetic energy (TKE) and its dissipation rate, to be used later by the PSPRAY model, and is computed as the superimposition of the background turbulence and the turbulence inside the flow zones modified by the buildings. The atmospheric background turbulence inherited from the large scale is evaluated on the basis of boundary-layer parametrizations such as Hanna et al. (1982). The turbulence locally generated by the obstacles is calculated using a numerical scheme based on the local wind shear (deformation tensor) and the mixing length (derived as a function of the minimum distance to the surrounding buildings) assuming the equilibrium of the production and dissipation terms.
2.2 PSPRAY Dispersion Model
The PSPRAY model is a Lagrangian particle dispersion model (Rodean 1996) able to take into account the presence of obstacles; it is the parallelized version of the SPRAY model (Anfossi et al. 1998, 2010; Tinarelli et al. 1994, 2007, 2013). The dispersion of an airborne contaminant (gas or fine aerosol) is simulated by following the trajectories of a large number of numerical particles. Each trajectory is obtained by integrating in time the virtual particle velocity that is the sum of a transport component defined by the local average wind vector provided by the PSWIFT model, a stochastic component representing dispersion due to the atmospheric turbulence, and an additional component related to possible buoyancy effects (if any). The turbulent component is derived from the stochastic scheme developed by Thomson (1987) by solving a 3D form of the Langevin equation. This equation comprises a deterministic term that depends on the Eulerian probability density function of the turbulent velocity and is determined from the Fokker–Planck equation, and a stochastic diffusion term that is obtained from a Lagrangian structure function.
The PSPRAY model deals with gas dispersion in industrial and urban environments by considering bouncing against obstacles and computing deposition on the floor and building walls and roofs. The PSPRAY model treats elevated and ground-level emissions, instantaneous and continuous emissions, time-varying sources, plumes without initial momentum or with initial arbitrarily-oriented momentum, negative or positive buoyancy, cloud spread at the ground due to gravity, and particle reflection at the domain bottom in the presence of a dense cloud.
3 Presentation of Data and Model Set-Up
Models participating in the UDINEE international exercise are compared on the basis of their performance in simulating results from the JU 2003 field experiment. The selection of the JU 2003 dataset was motivated by the availability of a large amount of tracer and meteorological information recorded during ten intensive operating period (IOP) days. The duration of sampling on each IOP day was 8 h during which there were three 20-min sulphur hexafluoride (SF6) tracer releases and three to six instantaneous puff SF6 releases. Six IOPs had daytime SF6 releases and four IOPs had night-time releases. For the entire 8-h IOP, detailed meteorological, turbulence and tracer measurements were available (see Clawson et al. 2005; Hanna et al. 2007).
The aim of UDINEE is to evaluate the capabilities of atmospheric dispersion models in simulating the dispersion of particles generated by an RDD explosion. The JU 2003 field experiment includes neither thermal effects nor source terms with a vertical distribution, which are typical of an RDD event. Nonetheless, instantaneous releases are straightforwardly more representative of such an event than continuous releases. Thus, the UDINEE exercise only considered instantaneous releases from the JU2003 field campaign. In the comparison exercise, we did not have the resources to run the PMSS modelling system and analyze the results for all instantaneous tracer release experiments. We focus on a unique IOP, namely IOP 8, which was also chosen as a previous test case using the MSS modelling system (with the previous non-parallel versions of the SWIFT and SPRAY models) (Hanna et al. 2011). IOP 8 occurred on 24 July 2003, and consisted of three continuous releases of 30-min duration separated by 90 min, starting at 0400 UTC, and four instantaneous releases every 20 min starting at 1000 UTC, not long before sunrise. In the following sections, time is provided in either UTC or local time (default is UTC), where local time is UTC−5 h. The next sub-sections describe the available concentration measurements in IOP 8 and the main features of the puff releases simulations with the PMSS modelling system.
3.1 On-site Measurements
During the JU2003 experimental campaign, meteorological and concentration measurements were made, with observation sites used in the comparisons restricted to the approximate 1 km × 1 km domain of the simulations (see Sect. 3.2 for more details). Meteorological devices include 3D sonic anemometers at a height of 8 m above the ground or building top measuring high frequency wind velocity, turbulence and temperature. The US Army Dugway Proving Ground deployed a mobile surface meteorological station, referred to as PWIDS (Portable Weather Information Display System), located upwind of the domain on top of a post office, at a height of roughly 40 m above the ground. The Pacific Northwest National Laboratory operated, on the roof of the Civic Center Music Hall, a meteorological station that was not made available to the modellers during the UDINEE exercise. The layout of meteorological measurements in the central business district (CBD) of Oklahoma City is presented in Fig. 1.

Central business district in Oklahoma City with 3D sonic anemometers (in purple), Portable Weather Information Display System, and Pacific Northwest National Laboratory (in red) meteorological stations
Concentrations of SF6 were sampled by fast-response real-time tracer gas analyzers (TGAs), placed in ten vans, which were mobile throughout all IOPs. The layout for IOP 8 is provided in Fig. 2, which shows the locations of the release and of the TGAs. From the measurements, the maximum concentration and the time series of the normalized concentration were deduced for each release at each sensor location. The measurements were not provided in the UDINEE exercise, but they were available in Zhou and Hanna (2007). Moreover, Hamburg University conducted experiments in a small-scale mock-up reproducing the layout of downtown Oklahoma City. For the extensive analysis of concentration measurements, see Hertwig (2008).

View of the SF6 sampling locations in IOP 8. Measurements by fast-response real-time tracer gas analyzers are shown in blue. The release location is also visible in red
3.2 Model Set-Up
The simulation domain was chosen to be compliant with the UDINEE exercise requirements, using a horizontal resolution of 5 m, and a domain size of 1.6 km × 1.4 km, leading to 320 × 280 points in a horizontal plane. The vertical grid has 57 points, which is probably too many detailed for the model but was required by the UDINEE exercise. The south-west corner of the domain is at latitude/longitude 35.462°N/97.522°W.
Building data were provided through two shapefiles: a large-scale one covering Oklahoma City and a fine resolution one covering the major part of the CBD, the two shapefiles being combined to cover the full extent of the domain. An overview of the buildings is shown in Fig. 3, where we note in particular the multiple skywalks that connect buildings in the CBD.

Large view of the domain (top) and close view looking eastward (bottom) of the central business district in Oklahoma City
The UDINEE exercise requirements gave no topography information, and as the terrain close to the release was flat, no strong influence of the local-scale topography on the flow or dispersion was expected. Thus, the simulation domain was considered as flat at the average elevation of Oklahoma City (365 m above sea level). Meteorological variables available as potential input data available in the framework of UDINEE include,
-
Mesoscale model 5 (MM5) calculations available every 3 h, extrapolated on a 1-h basis and stored in the MEDOC file format, including wind, temperature and mixing height. MM5 is a mesoscale weather forecast model developed by Penn State University and the National Center for Atmospheric Research (Grell et al. 1994). The MM5 calculations were performed in preparation for JU 2003 (Halvorson et al. 2004; Liu et al. 2006);
-
Wind speed, wind direction, and temperature from the single PWIDS station upwind of the domain, at 10-s sampling time;
-
A mixture of wind speed and direction provided by the PWIDS station, and all other data from MM5 calculations.
Several possible choices of input meteorology for the model have been tested and are discussed in Sect. 4.2.
Regarding the PSPRAY model simulations of the tracer concentration, the grid was chosen to be identical to that of the PSWIFT model computations. Dispersion simulations are performed from 1000 to 1130 UTC, with emissions from the four puff releases as follows: 0.5 kg at 1000 UTC, 0.5 kg at 1020 UTC, 0.3 kg at 1040 UTC, and 0.305 kg at 1100 UTC.
The PSPRAY model’s main parameters are described below:
-
Emissions are of 1-s duration corresponding to a 1-s emission timestep, and are located 2 m above the ground inside a 1.6-m cube. This reproduces the experimental releases for which a 2-m diameter balloon containing SF6 was popped at head height.
-
Synchronization timestep is 1 s.
-
Concentrations are computed every minute with concentration samples each second. Each concentration field is therefore produced using 60 concentration samples.
-
Tests have been performed using 20,000, 80,000 and 340,000 particles for each source. The latter value allows modelling of 1 µg m−3 concentration at ground level.
4 Simulation Results and Validation
This section is divided into five sub-sections that successively describe: (1) the method for comparing the numerical and experimental results of the IOP 8 trials in JU 2003; (2) the choice of the wind and the turbulence input data in the simulations of the IOP 8 puff releases with the PMSS modelling system; (3) the meteorology and dispersion results submitted in the framework of the UDINEE exercise; (4) the meteorology and dispersion results obtained by substituting the diagnostic flow model by the momentum flow solver in the PMSS modelling system; and (5) a discussion based on statistical metrics about the contrasting performances of the PMSS modelling system based on its numerical options.
4.1 Comparison Methods of the Model Simulations
In UDINEE, the simulated wind and concentration fields near the ground were assessed by a combination of qualitative and quantitative comparisons with their values at the measurement locations. A qualitative analysis of the contour plots was carried out to compare the modelled plume with the observed plume, and thus to check if the flow and dispersion models correctly simulate details such as the channeling through the street network.
Quantitative comparisons assess whether the simulated mean wind speed, wind direction, or concentration match the observed mean wind speed, wind direction, or concentration and the degree of scatter. The quantitative metrics are most often defined by the fractional bias (FB), the normalized mean square error (NMSE), and the fraction within a factor of two (FAC2). The equations for FB and NMSE are recalled hereafter, with C0 the observed concentration, Cp the predicted concentration and overbar the averaging operator,
Values for the quantitative metrics applied to simulated and measured concentrations were first suggested by Chang and Hanna (2004) and they have been widely used in atmospheric dispersion model evaluation (see e.g., Schatzmann and Leitl 2011). Acceptance criteria for the concentrations were adapted to urban applications by Hanna and Chang (2012) as follows,
-
|FB| < 0.67, the relative mean bias is less than a factor of 2;
-
NMSE < 6, the random scatter is less than 2.4 times the mean;
-
FAC2 > 0.30, the fraction of Cp within a factor of two of C0 exceeds 0.30.
When assessing the statistical analysis of the numerical results, the emphasis is placed on the trajectories of the puffs through the street network and the peak concentrations (also referred to as “concentration maxima”) at the TGA measurement points. This kind of information is crucial from the perspective of emergency preparedness and response and it implicitly contains travel times of the puffs. Pairing puff-release concentration measurements and predictions both in space and time results in misleading statistics and does not reflect the actual ability of an atmospheric dispersion model to capture the dispersion of puffs. As a matter of fact, observed and simulated puff patterns may be similar, differing only due to small discrepancies in the wind direction or in the representation of the buildings. There can also be small and non-significant time shifts between the observed and predicted puff arrival at a single location, especially when considering that observations are instantaneous single-point values, which may differ from the spatio–temporal averages produced by model simulations. Moreover, as an ensemble modelling system, the PMSS system does not describe the behaviour of single episodes, but the average of a large number of episodes, formally termed realizations, which occur in the same macroscopic conditions. This approach is problematic when simulating experimental instantaneous releases, which are single realizations with a strong variability among the outcomes of these different realizations. In the case of an ensemble-averaged model such as the PMSS modelling system, the comparison of space-and-time paired concentrations is intrinsically questionable due to the statistical nature of the model. Thus, the following analysis is deliberately restrained to the comparison between the numerical and experimental concentration maxima.
4.2 Choice of Wind and Turbulence Input Parameters in the UDINEE Exercise
Allwine and Flaherty (2006) report a dense network of meteorological instruments deployed during the JU 2003 field campaign with the additional collection of upper air data. However, there was a lack of input profiles in the measurements provided to the modellers in the framework of UDINEE. The choice of input data for flow was therefore problematic. The PWIDS station was located at 40 m above the ground upwind of the domain, and provided the only measurement sensors used as input for the model, since it should be representative of the incoming flow above the urban canopy. All other sensors were located inside the streets and were strongly influenced by the surrounding buildings. Hence, their wind measurements or the average of their measurements can be very different from the incoming flow above the canopy layer depending on the meteorological conditions and the buildings and street configuration.
Several options were investigated: using only the MM5 data or using a mixture of the wind field provided by PWIDS (and extrapolated vertically) and other meteorological variables taken from MM5 output. The option of taking the skimming zones into account in the PSWIFT model was also examined, with skimming zones defined as recirculation flows between the buildings, and created when using the Röckle-type algorithm (Röckle 1990) in the PSWIFT diagnostic flow model. Inside a mixture of very tall skyscrapers and regular buildings, the skimming-zone creation may tend to produce artificially high wind speeds behind tall skyscrapers as shown in previous PSWIFT model simulations. Thus, a third option was investigated: using a mixture of MM5 and PWIDS data with the skimming-zone option turned off in the PSWIFT model.
In the framework of the UDINEE exercise, MM5 data were provided in MEDOC format as large-scale simulations of the wind field with an actual timestep of 3 h. By contrast, the PWIDS data were 10-s averages. Since the PMSS modelling system solves the RANS equations, a 10-min average was considered a relevant time period to average the PWIDS wind measurements and linearly interpolate the MM5 data. Analysis of the data showed that the wind direction provided by PWIDS is east-south-east, while the wind direction issued by MM5 is south–south-east. When using a mixture of PWIDS and MM5 data, 10-min averages of PWIDS data and 10-min interpolation of MM5 data were provided as an input to the PMSS modelling system.
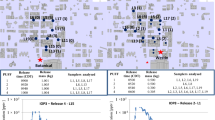
Dispersion computations were performed first with a reduced set of particles (20,000 for each release) taking only the local turbulence (created by the buildings) into account. This series of calculations gave an insight into the general trend of the plume. Local turbulence quantities were computed using wind shear and the mixing-length approach, and are strongly dependent on the local wind speed and do not take into account larger-scale turbulence. Figure 4 shows the path followed by puffs near the ground for the first release at 1000 UTC and for various wind inputs. Wind direction is quite constant during the four releases, and the flow results are quite similar for each release. The paths shown in Fig. 4 have been compared to experimental measurements of the 3D sonic anemometers inside the streets, with Fig. 5 showing the maximum concentration seen by each TGA sensor during the first release. The numbering of the sensors is identical in Figs. 4 and 5, and is also consistent with Hertwig (2008).

Trajectory of the puff of the IOP 8 first release as computed by the PMSS modelling system for various meteorological inputs. MM5 data only are on the left-hand side; the mixture of PWIDS and MM5 data is in the middle; the mixture of PWIDS and MM5 data with the skimming zones off is on the right-hand side

Maximum concentration (ppt) seen by each TGA sensor during the IOP 8 first release. The larger the circle size, the higher the concentration. The sensors are numbered near the circle with the values of the concentration maxima. Sensors numbering is consistent with the pictures in Fig. 4. Coordinates are in metres, projection is Universal Transverse Mercartor (UTM), zone 14S
Figures 4 and 5 display information for the first release, but patterns for the other releases are very similar with sensor 4 always measuring the highest concentration. As illustrated by Fig. 4, the simulations of the PMSS modelling system tend to produce a more westward path than the field trials, and as can be seen in the left panel of Fig. 4, a more northward path is produced when using only MM5 output as input data. This is consistent with the MM5 wind direction more to the north than that measured at the PWIDS experimental station. Thus, MM5 meteorological data input are more representative of the flow on the calculation domain. Furthermore, the right panel in Fig. 4 shows that it is not beneficial to ignore the skimming zones in the PSWIFT model as the puff no longer heads in a northward direction. Finally, the simulations using MM5 as the only meteorological input and taking the skimming zones into account are now compared thoroughly with the experimental data.
Up to now, turbulence was limited to local turbulence computed using the local shear tensor. Figure 6 presents the scatter plot of the computed versus measured TKE at each 3D sonic anemometer location using a 1-h average. First, it can be noticed that the observed TKE level does not change very much by sensor, with the pattern in Fig. 6 such that most of the points are an underestimate of the TKE and some points are a strong overestimation of the TKE at sensor locations. The TKE computed by the local turbulence scheme is too localized due to wind shear being too strong and very local. Globally, the TKE is underestimated despite the IOP 8 trials being performed at night without thermal mixing. The metrics associated with Fig. 6 are as follows: FB = –0.22, NMSE = 3.7 and FAC2 = 0.26. Due to too many underestimations and some overestimations, the distribution of the points in the scatter plot for the TKE in Fig. 6 and the value of FAC2 is unsatisfactory.

Scatter plot of the TKE (m2 s−2) for each 3D sonic anemometer. The PSWIFT diagnostic flow model is run with pure MM5 input data and the skimming zones on. Only the local turbulence due to the buildings is considered. Metrics for this plot are: FB = −0.22, NMSE = 3.7, FAC2 = 0.26
To obtain more consistent values of TKE, background turbulence has been superimposed onto the local turbulence. Background turbulence has been computed using the Hanna parametrization (Hanna et al. 1982), which is calculated using the atmospheric stability and surface friction velocity \( u_{*} \). In order to obtain a relevant diagnosis of \( u_{*} \), we performed a nested approach, where the background turbulence is computed at larger scales with the first-level wind speed above the ground being typical of the surface layer. Then, the larger-scale turbulence is provided to the nested urban calculation as the background turbulence value. Calculating the background turbulence at the urban scale directly would lead to a wrong evaluation of \( u_{*} .\) Indeed, wind profiles are local profiles between the buildings, not averaged profiles inside an urban layer with large-scale roughness, and the first level is not representative of this layer, but has very local values. Hence, the background turbulence has to be computed at a larger scale and transmitted to the inner urban domain using a nested calculation within the PMSS modelling system.
4.3 Review of the Simulation Submitted to the UDINEE Exercise
In the previous sub-section, we performed a sensitivity analysis of the puff dispersion results to the meteorological input data used to drive the model. We have shown that using only the MM5 input data gives the most representative results regarding the trajectories of the puffs in IOP 8. Moreover, the influence of the skimming zones in the PSWIFT model diagnostic computation has been proven to be beneficial. Finally, we have established that taking only the local urban turbulence generated by the buildings into account does not lead to satisfying TKE results. Thus, the background turbulence has to be considered, as is the case in the calculations presented hereafter, which were provided to the organizers of the UDINEE exercise.
4.3.1 Flow Simulations
From here on, the flow and turbulence simulations use a nested approach with two nest levels. For the large-scale domain, only MM5 data are used as meteorological input data, with the large domain having a grid resolution of 500 m, with 5 × 5 × 14 points since it is designed solely for turbulence analysis at the relevant scale to generate background turbulence. This turbulence is then transmitted to the nested domain, interpolated, and added to the local-scale turbulence.
Figure 7 shows the new scatter plot of the computed versus measured TKE at each 3D sonic anemometer location using a 1-h average. The range of the simulated TKE is closer to the range of the measured values compared to the previous computations (without any background turbulence). The TKE is no longer systematically underestimated, with a few points underestimating the TKE when compared to results using only local turbulence. However, there is still a trend for overestimation. A value of 0.5 m was chosen for the large-scale roughness length, in order to be consistent with skyscrapers inside the CBD of Oklahoma City. Considering the turbulence measurements displayed in Fig. 7, this value could be an overestimation, however the roughness length is not used as a tuning parameter for turbulence, and the value of 0.5 m was retained.

Scatter plot of the TKE (m2 s−2) for each 3D sonic anemometer. The PSWIFT diagnostic flow model is run in two nested domains with pure MM5 input data and the skimming zones on in the urban domain. The TKE is obtained by the addition of background and local components. Metrics for this plot are: \( FB = \, - 0.78 \), NMSE = 2.1, FAC2 = 0.47
The metrics associated with Fig. 7 are as follows: \( FB = \, - 0.78 \), NMSE = 2.1 and FAC2 = 0.47, and even if the FB value denotes overestimated computed results, FAC2 is now an improvement for the plot in Fig. 7 than for the plot in Fig. 6.
Figure 8 shows the scatter plots of the computed versus measured wind speed and direction at each 3D sonic anemometer location using a 1-h average. The scatter plot for the wind speed shows a satisfying agreement between the modelled and measured values: most of the points are within a factor of two, without any trend of the PMSS model to underestimate or overestimate. For a small number of sensors, a reverse direction (i.e. a discrepancy between 120° and 180°) is observed between the computed and measured wind directions, but the large majority of the locations have a wind-direction difference < 50° between the computations and the measurements. The metrics are: FB = 0.052, NMSE = 0.36, FAC2 = 0.58 for the wind speed and FB = −0.31, NMSE = 0.56, FAC2 = 0.78 for the wind direction. The cyclic character of the wind direction has been accounted for in the calculation of the metrics.

Scatter plot of the wind speed (m s−1) (left) and wind direction (°) (right) for each 3D sonic anemometer. The PSWIFT diagnostic flow model is run in two nested domains with pure MM5 input data and the skimming zones on in the urban domain. Turbulence is obtained by the addition of background and local components. Metrics for the wind module plot are: FB = 0.052, NMSE = 0.36, FAC2 = 0.58 and for the wind direction: FB = −0.31, NMSE = 0.56, FAC2 = 0.78
4.3.2 Dispersion Simulations
Concentration calculations have been performed using 340,000 source particles to ensure that it is possible to track concentrations down to 1 μg m−3 in the surface layer. Figure 9 displays the concentration pattern for the four releases 8 min after the beginning of the release. The pattern for the four releases is quite similar, but with differences due to slight shifts in the wind direction. Sensors to the north tend to be more exposed compared to sensors to the west as time goes by.

Cross-sections at 2 m above the ground level displaying the tracer concentration field 8 min after each release (release 1 is top left, 2 is top right, 3 is bottom left and 4 is bottom right). The release location is specified on the release 1 image with a green circle
Figure 10 shows the scatter plot of the computed versus measured maximum concentration (or peak concentration) for each puff release at each TGA sensor location. The maximum concentrations are obtained from the measured and computed time series with an averaging time of 1 min, which is a typical value used in statistical Lagrangian particle dispersion modelling.

Scatter plot of the maximum or peak concentrations (ppt) for each puff release and TGA sensor location. The PSWIFT diagnostic flow model is run in two nested domains with pure MM5 input data and the skimming zones on in the urban domain. Turbulence is obtained by the addition of background and local components. Metrics for this plot are: FB = −1.04, NMSE = 4.5, FAC2 = 0.53
The metrics are as follows: FB = −1.04, NMSE = 4.5, FAC2 = 0.53. First, it can be noted that NMSE and FAC2 values satisfy the criteria proposed by Hanna and Chang (2012) for dispersion modelling in urban environments; FB = −1.04 represents an overprediction by a factor of about 3, while its value should not exceed −0.67 or an overprediction by a factor of 2. We argue that FB = −1.04 is quite acceptable in test cases as complicated as individual puff releases in an urban district. FAC2 indicates the overall agreement of the simulations with measurements. From Fig. 10, it can be observed that the maxima are within a factor of 10 for almost all values. Moreover, the sensor with the largest computed peak concentration is the same as that with the largest measured value, except for puff release 1. Nonetheless, it is also apparent that the PMSS modelling system has a trend to overestimate the maximum values.
4.4 Comparison to Results Obtained with the PSWIFT Momentum Solver
In the previous sub-section, we presented results of the PSWIFT and PSPRAY model flow and dispersion simulations for the four puff releases in IOP 8 field trials. These numerical results were distributed to UDINEE’s organizers for the intercomparison of models participating in the exercise. The local-scale urban-flow computations were carried out using the large-scale MM5 data as input meteorological data and taking into account skimming zones between the buildings. Turbulence was computed by superimposing the contributions of both large-scale and local-scale components. The agreement between the numerical and experimental results is deemed as correct for the flow characteristics at the sonic anemometer stations and the tracer concentrations at the TGA sensors.
As mentioned in Sect. 2.1, a momentum solver was recently developed in the PSWIFT model (see Oldrini et al. 2014, 2016) and is available as an option. All flow computations presented previously were performed with the diagnostic model in the PSWIFT model as this is the most common approach to running the PMSS modelling system. However, as the momentum solver can be used as a subsequent improvement of the turbulent flow simulation, we also performed computations with the PSWIFT momentum solver and the PSPRAY model using IOP 8 data. The results of these simulations are presented hereafter.
4.4.1 Meteorology
Additional simulations were carried out using the RANS solver of the PSWIFT model. Contrary to the diagnostic option of the PSWIFT model, the flow was computed without nesting for turbulence. Indeed, with the RANS solver turbulence closure, the turbulence is calculated in a coupled way with the wind field. Turbulence is physically found in the whole domain and since it is night-time, thermal turbulence is not essential in the simulation.
A scatter plot of the computed versus measured TKE is shown in Fig. 11 at each 3D sonic anemometer location using a 1-h average. Compared to the diagnostic flow calculation, the agreement between the model results and the measurements is noticeably improved. The metrics are as follows: FB = 0.42, NMSE = 0.38, FAC2 = 0.72, with no marked underestimation or overestimation of the simulated results, but a general trend of underestimation as denoted by the FB value. The ranges of computed and measured values are quite similar and closer to each other than in the simulations using only the diagnostic flow model. This is illustrated by the much improved FAC2 and NMSE values using the momentum option in comparison to the turbulent flow computations without this option.

Scatter plot of the TKE (m2 s−2) for each 3D sonic anemometer. In this case, the computations were carried out with the momentum version of the PSWIFT model. Metrics for this plot are: FB = 0.42, NMSE = 0.38, FAC2 = 0.72
Scatter plots of the computed versus measured wind speed and wind direction are shown in Fig. 12 at each 3D sonic anemometer location using a 1-h average. The vast majority of points are within a factor of two considering both the wind speed and the wind direction results obtained with the momentum solver in the PSWIFT model. The metrics are: FB = 0.25, NMSE = 0.35, FAC2 = 0.58 for the wind speed and FB = −0.34, NMSE = 0.47, FAC2 = 0.83 for the wind direction. Comparing the simulations with the momentum and diagnostic options in the PSWIFT flow model, one can notice a similar good performance of FAC2 for the wind speed and direction, a higher value of FB for the wind speed denoting a slight underestimation of the wind speed when the momentum computation is performed, and similar good results of FB for the wind direction, and of NMSE for the wind speed and direction with or without the momentum option. Once more, the cyclic character of the wind direction has been taken into account in the evaluation of all metrics.

Scatter plot of the wind speed (m s−1) (left) and wind direction (°) (right) for each 3D sonic anemometer. In this case, the computations were carried out with the momentum version of the PSWIFT model. Metrics for the wind module plot are FB = 0.25, NMSE = 0.35, FAC2 = 0.58, and for the wind direction FB = −0.34, NMSE = 0.47, FAC2 = 0.83
4.4.2 Dispersion
Figure 13 displays a scatter plot of the computed versus measured maximum concentration (or peak concentration) for each puff release at each TGA sensor location. The maximum concentrations are obtained from the measured and computed time series with an averaging time of 1 min. The metrics are as follows: FB = −0.07, NMSE = 1.3, and FAC2 = 0.55, which are excellent values regarding the Hanna and Chang (2012) acceptance criteria. Calculations using the flow generated by the momentum solver in the PSWIFT model no longer systematically overestimate the maximum concentration when compared to the calculations based on the diagnostic flow model and provide a much reduced NMSE value. The FAC2 values remains at a similar satisfactory value of around 0.5. While there are underestimates of some intermediate values, the simulated concentration maxima are now much closer to the measured values. This demonstrates, at least in this situation, the benefit of using the PSWIFT momentum solver to simulate the turbulent flow field used as an input for the PSPRAY model dispersion computations.

Scatter plot of the maximum or peak concentrations (ppt) for each puff release and TGA sensor location. In this case, the turbulent flow input for the PSPRAY model was simulated with the momentum version of the PSWIFT model. Metrics for this plot are FB = −0.07, NMSE = 1.3, and FAC2 = 0.55
4.5 Summary and Discussion
The FB, NMSE and FAC2 values obtained for all simulations are summarized in Table 1. The main comments on these metrics are listed hereafter:
-
Using the PSWIFT flow diagnostic model, the results for TKE are much improved when taking the background turbulence into account, as can be seen by the improvement in FAC2 and NMSE values while keeping an acceptable value for FB,
-
The PSWIFT model flow momentum solver improves the computation of TKE as can be noted in the values of FB, NMSE and above all FAC2,
-
Results for the wind direction and wind speed prove to be equivalently very good in terms of the FB, NMSE and FAC2 metrics using the diagnostic or momentum wind flow solver in the PSWIFT model. There is a slight improvement with the momentum flow solver compared to the diagnostic flow solver,
-
The results for the peak concentration for the four puffs at all sensor locations generally meet the acceptance criteria of Hanna and Chang (2012) with a significant improvement of FB and NMSE values and a slight improvement of FAC2 the value when using the flow field from PSWIFT momentum solver compared to PSWIFT diagnostic model. It is worth noting that the acceptance criteria applicable not only to the urban environment, but also to the rural environment (which is, in principle, simpler to model) are satisfied.
In our study, the analysis of the tracer concentration is limited to the comparison of the numerical and experimental concentration maxima. In fact, the comparison of space-and-time paired concentrations may not be relevant for ensemble-averaged statistical models like PMSS. In these conditions, one can note that whatever the parametrization, the PMSS modelling system is able to represent the trajectories of the four puffs in IOP 8 through the complicated street network of the CBD in Oklahoma City. The simulated peak values are consistent, both in the location of the sensor measuring the concentration maxima and in magnitude, when compared to JU2003 field trials. These features are fully consistent with the needs and expectations of the rescue teams for cases of emergency response (Armand et al. 2015). Thus, they are key elements regarding the validity of implementing the PSWIFT and PSPRAY models in a decision-support system devoted to emergency preparedness and response.
5 Conclusion
Validation performed on JU2003 real-scale data in the framework of the UDINEE exercise demonstrates a satisfactory agreement between the PMSS modelling system and field data for IOP 8 regarding both wind and concentration measurements. As the exercise focused on the JU2003 instantaneous and single realization releases, it was challenging for all the models involved in the UDINEE exercise and especially for ensemble-averaged models. The PMSS modelling system is a combination of the PSWIFT model, a diagnostic flow model optionally initializing a momentum solver, and the PSPRAY model, a Lagrangian particle dispersion model. In this RANS/Lagrangian framework, the statistical significance of single realizations is reduced and could lead to bias. Indeed, an individual puff can be transported to one side of a building, whereas averaged multiple releases can lead to a concentration field statistically spread around the same building with possibly higher values of the concentration on the other side of the building.
A sensitivity study using the PMSS modelling system was carried out using different parametrizations. The validation of the modelling system based on the instantaneous releases in IOP 8 illustrated the influence of both the large-scale atmospheric component and local-scale urban component of turbulence (due to the buildings). Taking account of the skimming zones in between the buildings in the PSWIFT urban flow model was also shown to be beneficial in these particular test cases. The use of the skimming zone improves concentration modelling when channeling into the street network plays an important part in the dispersion, as is very often the case for releases in a dense urban environment. The tendency of the skimming zone scheme to introduce high wind speeds behind tall skyscrapers is counterbalanced by improved dispersion in the street network due to improved flow patterns in the street canyons.
With the diagnostic solver in the PSWIFT model, maximum concentrations computed with the PSPRAY model are within a factor of 10 for the large majority of sensors, and within a factor of two for more than half of them. Acceptance criteria for the urban environment proposed by Hanna and Chang (2012) are met for FAC2 and NMSE values, while slightly outside of the acceptable range for FB values. The performances are improved for the momentum solver in the PSWIFT model calculations, meeting all the Hanna and Chang (2012) criteria. In this case, the trend to overestimate concentrations seen in the non-momentum calculation has disappeared. Comparisons between momentum and non-momentum computations show other important trends: in particular, when using the momentum computation a much better turbulence agreement and a more precise maximum concentration are found. Nonetheless, no overall conclusion can be reached, this test case being one of the first comparisons of this type between the diagnostic and momentum solvers in the PSWIFT model.
Regardless of which flow simulation option and flow and dispersion parametrization are used in the PMSS modelling system (of course, with the condition of relevance as in this sensitivity study), the numerical results regarding the wind speed and direction, the TKE, and the concentration generally agree with the measurements acquired during the IOP 8 instantaneous releases in JU2003. This demonstrates the robustness of the PMSS modelling system to take into account even very complex phenomena. Moreover, typical refined city calculations for a square domain of roughly 1.5-km edge size at a horizontal resolution of 5 m, and a 1.5-h simulation using 340,000 particles, takes around 30 min using a single Intel Core i5 core at 2.6 GHz. The simulation duration can be reduced to less than 10 min when using four cores (Oldrini et al. 2017). These moderate durations of the simulations are acceptable and fully consistent for emergency response planning purposes (e.g., rescue teams exercises for a potential emergency situation) and for response of the rescue services and their authorities to a real emergency.
As previously mentioned, the UDINEE exercise was intended to simulate a RDD detonation. While not all phenomena occurring in this kind of scenario were accounted for in the JU2003 campaign (particularly the thermal effects of the explosion and the vertical distribution of the source term), a first and major step was to identify the capability of 3D flow and dispersion models to simulate the transport and dispersion of puff releases in a built-up urban (or industrial) environment. The PMSS modelling system has demonstrated that this is feasible by accounting for a balance between the need for accuracy in physics and the need for fast run times.
References
Allwine KJ, Flaherty JE (2006) Joint Urban 2003: study overview and instrument locations. Tech. Rep., Pacific Northwest National Lab, Richland, WA, PNNL-15967
Allwine KJ, Leach M, Stockham L, Shinn J, Hosker R, Bowers J, Pace J (2004) Overview of Joint Urban 2003: an atmospheric dispersion study in Oklahoma City. In: Symposium on planning, nowcasting and forecasting in the Urban Zone, American Meteorological Society Annual Meeting, 10–15 January, 2004, Seattle, Washington, USA
Anfossi D, Desiato F, Tinarelli G, Brusasca G, Ferrero E, Sacchetti D (1998) TRANSALP 1989 experimental campaign—II simulation of a tracer experiment with Lagrangian particle models. Atmos Environ 32(7):1157–1166
Anfossi D, Tinarelli G, Trini Castelli S, Nibart M, Olry C, Commanay J (2010) A new Lagrangian particle model for the simulation of dense gas dispersion. Atmos Environ 44:753–762
Armand P, Bartzis J, Baumann-Stanzer K, Bemporad E, Evertz S, Gariazzo C, Gerbec M, Herring S, Karppinen A, Lacome JM, Reisin T, Tavares R, Tinarelli G, Trini Castelli S (2015) Best practice guidelines for the use of the atmospheric dispersion models in emergency response tools at local-scale in case of hazmat releases into the air. Tech Rep, COST Action ES 1006
Baumann-Stantzer K, Andronopoulos S, Armand P, Berbekar E, Efthimiou G, Fuka V, Gariazzo C, Gasparac G, Harms F, Hellsten A, Jurcakova K, Petrov A, Rakai A, Stenzel S, Tavares R, Tinarelli G, Trini Castelli S (2015) Model evaluation case studies: approach and results. Tech Rep, COST Action ES 1006
Brown MJ, Williams M (1998) An urban canopy parameterization for mesoscale meteorological models. In: Proceedings of the American meteorological society conference on second urban environment symposium, 2–7 November, 1998, Albuquerque, New Mexico, USA
Camelli FE, Hanna SR, Lohner R (2004) Simulation of the MUST field experiment using the FEFLO-urban CFD model. In: Fifth symposium on the urban environment, American Meteorological Society, 23–26 August, 2004, Vancouver, British Columbia, Canada
Chang JC, Hanna SR (2004) Air quality model performance evaluation. Meteorol Atmos Phys 87:167–196
Clawson KL, Carter RG, Lacroix DJ, Biltoft CA, Hukari NF, Johnson RC, Rich JD (2005) Joint Urban 2003 (JU03) SF6 atmospheric tracer field tests. NOAA Air Resources Laboratory, Tech Rep OARARL-254
Gowardhan AA, Pardyjak ER, Senocak I, Brown MJ (2011) A CFD-based wind solver for urban response transport and dispersion model. Environ Fluid Mech 11:439–464
Grell GA, Dudhia J, Stauffer DR (1994) A description of the fifth-generation Penn State/NCAR mesoscale model (MM5). NCAR Tech Note NCAR/TN-398 + STR
Halvorson S, Liu Y, Sheu RS, Basara J, Bowers J, Warner T, Swerdlin S (2004) Mesoscale and urban-scale modeling support for the Oklahoma City Joint-Urban 2003 field program. In: Symposium on planning, nowcasting and forecasting in the urban zone, American Meteorological Society Annual Meeting, 10–15 January, 2004, Seattle, Washington, USA
Hanna S, Baja E (2009) A simple urban dispersion model tested with tracer data from Oklahoma City and Manhattan. Atmos Environ 43:778–786
Hanna SR, Chang JC (2012) Acceptance criteria for urban dispersion model evaluation. Meteorol Atmos Phys 116:133–146
Hanna SR, Briggs GA, Hosker Jr RP (1982) Handbook on atmospheric diffusion. Atmospheric Turbulence and Diffusion Lab, National Oceanic and Atmospheric Administration, Oak Ridge, Tennessee, USA. Tech Rep DOE/TIC-11223
Hanna SR, Brown MJ, Camelli FE, Chan S, Coirier WJ, Hansen OR, Huber AH, Kim S, Reynolds RM (2006) Detailed simulations of atmospheric flow and dispersion in urban downtown areas by computational fluid dynamics (CFD) models—an application of five CFD models to Manhattan. Bull Am Meteorol Soc 87:1713–1726
Hanna S, White J, Zhou Y (2007) Observed winds, turbulence and dispersion in built-up downtown areas in Oklahoma City and Manhattan. Bound-Layer Meteorol 125:441–468
Hanna S, White J, Trolier J, Vernot R, Brown M, Gowardhan A, Kaplan H, Alexander Y, Moussafir J, Wang Y, Williamson C (2011) Comparisons of JU2003 observations with four diagnostic urban wind flow and Lagrangian particle dispersion models. Atmos Environ 45(24):4073–4081
Hertwig D (2008) Dispersion in an urban environment with a focus on puff releases. Study Project, Meteorological Institute, University of Hamburg, Hamburg, Germany
Kaplan H, Dinar N (1996) A Lagrangian dispersion model for calculating concentration distribution within a built-up domain. Atmos Environ 30(24):4197–4207
Liu Y, Chen F, Warner T, Basara J (2006) Verification of a meso-scale data-assimilation and forecasting system for the Oklahoma City area during the Joint Urban 2003 field project. J Appl Meteorol Climatol 45(7):912–929
McHugh CA, Carruthers DJ, Edmunds HA (1997) ADMS-Urban: an air quality management system for traffic, domestic and industrial pollution. Int J Environ Pollut 8:666–674
Oldrini O, Olry C, Moussafir J, Armand P, Duchenne C (2011) Development of PMSS, the Parallel Version of Micro SWIFT SPRAY. In: Proceedings of the 14th international conference on harmonisation within atmospheric dispersion modelling for regulatory purposes, 2–6 October, 2011, Kos, Greece
Oldrini O, Nibart M, Armand P, Olry C, Moussafir J, Albergel A (2014) Introduction of momentum equations in Micro-SWIFT. In: Proceedings of the 15th international conference on harmonisation within atmospheric dispersion modelling for regulatory purposes, 6–9 May, 2014, Madrid, Spain
Oldrini O, Nibart M, Duchenne C, Armand P, Moussafir J (2016) Development of the parallel version of a CFD – RANS flow model adapted to the fast response in built-up environments. In: Proceedings of the 17th international conference on harmonisation within atmospheric dispersion modelling for regulatory purposes, 9–12 May, 2016, Budapest, Hungary
Oldrini O, Armand P, Duchenne C, Olry C, Tinarelli G (2017) Description and preliminary validation of the PMSS fast response parallel atmospheric flow and dispersion solver in complex built-up areas. J Environ Fluid Mech 17(3):1–18
Patnaik G, Boris JP, Grinstein FF, Iselin JP (2003) Large scale urban simulation with the MILES approach. Annual American Institute of Aeronautics and Astronautics CFD conference, 23–26 June, 2003, Orlando, Florida, USA, AIAA Paper 2003-4104
Röckle R (1990) Bestimmung der Strömungsverhaltnisse im Bereich komplexer Bebauungs-strukturen. Dissertation, Technical University Darmstadt, Darmstadt, Germany (in German)
Rodean HC (1996) Stochastic Lagrangian models of turbulent diffusion. American Meteorological Society, Boston
Schatzmann M, Leitl B (2011) Issues with validation of urban flow and dispersion CFD models. J Wind Eng Indust Aerodyn 99(4):169–186
Schulman LL, Strimaitis DG, Scire JS (2000) Development and evaluation of the PRIME plume rise and building downwash model. J Air Waste Manag Assoc 5(3):378–390
Soulhac L, Salizzoni P, Cierco FX, Perkins R (2011) The model SIRANE for atmospheric urban pollutant dispersion—Part I: presentation of the model. Atmos Environ 45(39):7379–7395
Soulhac L, Lamaison G, Cierco FX, Ben Salem N, Salizzoni P, Mejean P, Armand P, Patryl L (2016) SIRANERISK: modelling dispersion of steady and unsteady pollutant releases in the urban canopy. Atmos Environ 140:242–260
Sykes RI, Parker SF, Henn DS, Cerasoli CP, Santos LP (2000) PC-SCIPUFF Version 1.3—technical documentation. ARAP Report No. 725. Titan Corporation, ARAP Group
Thomson DJ (1987) Criteria for the selection of stochastic models of particle trajectories in turbulent flows. J Fluid Mech 180:529–556
Tinarelli G, Anfossi D, Brusasca G, Ferrero E, Giostra U, Morselli MG, Moussafir J, Tampieri F, Trombetti F (1994) Lagrangian particle simulation of tracer dispersion in the lee of a schematic two-dimensional hill. J Appl Meteorol 33(6):744–756
Tinarelli G, Brusasca G, Oldrini O, Anfossi D, Trini Castelli S, Moussafir J (2007) Micro-Swift-Spray (MSS): a new modelling system for the simulation of dispersion at microscale—general description and validation. In: Borrego C, Norman AN (eds) Air poll modelling and its applications XVII. Springer, Dordrecht, pp 449–458
Tinarelli G, Mortarini L, Trini Castelli S, Carlino G, Moussafir J, Olry C, Armand P, Anfossi D (2013) Review and validation of Micro-Spray, a Lagrangian particle model of turbulent dispersion. In: Lagrangian modeling of the atmosphere, geophysical monograph, American Geophysical Union (AGU), vol 200, pp 311–327
Zhou Y, Hanna SR (2007) Along-wind dispersion of puffs released in a built-up urban area. Bound-Layer Meteorol 125:469–486
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Oldrini, O., Armand, P. Validation and Sensitivity Study of the PMSS Modelling System for Puff Releases in the Joint Urban 2003 Field Experiment. Boundary-Layer Meteorol 171, 513–535 (2019). https://doi.org/10.1007/s10546-018-00424-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10546-018-00424-1