
Abstract
In this work we are considering the porous elastic system with porous elastic dissipation and with elastic dissipation. Our main result is to show that the corresponding semigroup is exponentially stable if and only if the wave speeds of the system are equal. In the case of lack of exponential stability we show that the solution decays polynomially and we prove that the rate of decay is optimal. It is worth noting that the result obtained here is different from all existing in the literature for porous elastic materials, where the sum of the two slow decay processes determine a process that decay exponentially. Numerical experiments using finite differences are given to confirm our analytical results. Our numerical results are qualitatively in agreement with the corresponding results from dynamical in infinite dimensional.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Since the work of Goodman and Cowin [5] (see also [10]), in which a continuum theory of granular materials with interstitial voids was established, there have appeared many significant studies for various elastic materials with voids covering applications to many fields, such as biology materials, soils sciences, petroleum industry, etc.
With this in mind, let us consider the evolution equations for one-dimensional theories of porous materials given by
Here \(T\) is the stress, \(H\) is the equilibrated stress and \(G\) is the equilibrated body force. The variables \(u\) and \(\phi \) are, respectively, the displacement of the solid elastic material and the volume fraction. The constitutive equations are
Here \(\rho \), \(J\), \(\mu \), \(\gamma \), \(b\), \(\delta \), \(\xi\) and \(\tau \) are the constitutive coefficients whose physical meaning is well known.
The constitutive coefficients, in one-dimensional case, satisfies
As coupling is considered, \(b\) must be different from 0, but its sign does not matter in the analysis. It is worth noting that \(\gamma \) and \(\tau \) are nonnegative, that is \(\gamma \geq 0\) and \(\tau \geq 0\). The substitution of constitutive equations (1.2) into the evolution equations (1.1) give us
The above system we added the initial conditions
and Dirichlet-Dirichlet boundary conditions
or with Dirichlet-Neumann boundary conditions
The system (1.4)–(1.8) is damped by \(\gamma u _{t}\) and \(\tau \phi_{t}\) in the case when \(\gamma >0\) and \(\tau =0\) or \(\gamma =0\) and \(\tau >0\). In this sense, its energy is decreasing with time \(t\).
One of the questions regarding stability of porous elastic system concerns the minimum dissipation needed to obtain exponential decay. It is interesting to know if the energy is controlled by an exponential or polynomial function. We therefore, focus on establishing necessary and sufficient conditions to obtain stability of this system in both cases.
When \(\gamma >0\) and \(\tau >0\), then using the same method as in (see [8]), we can conclude that the system (1.4)–(1.8) is exponentially stable.
The paper is organized as follows. In Sect. 2, we present an overview of the main results in the literature. In Sect. 3, we study the porous elastic system with porous dissipation. In Sect. 3.1, we study the existence and uniqueness of solutions for the system (3.1)–(3.5) using the semigroup techniques. In Sect. 3.2, we prove that the semigroup \(S(t)=e^{{\mathcal{A}}t}\) associated with the system (3.1)–(3.5) is exponentially stable if and only if \(\frac{\rho }{\mu }-\frac{J}{\delta}= 0\). In Sect. 3.3, we show that the semigroup \(S(t)=e^{{\mathcal{A}}t}\) associated with the system (3.1)–(3.5) decays polynomially and we prove that the rate of decay is optimal. In Sect. 4, we study the porous elastic system with elastic dissipation. In Sect. 4.1, we study the existence and uniqueness of solutions for the system (4.1)–(4.5) using the semigroup techniques. In Sect. 4.2, we prove that if the semigroup \(S(t)=e^{{\mathcal{A}}t}\) associated with the system (4.1)–(4.5) is exponentially stable if and only if \(\frac{\rho }{\mu }-\frac{J}{\delta}= 0\). In Sect. 4.3, we show that the semigroup \(S(t)=e^{{\mathcal{A}}t}\) associated with the system (4.1)–(4.5) decays polynomially and we prove that the rate of decay is optimal. In Sect. 5, we show the numerical results by using finite difference method to confirm our analytical results.
2 Literature Overview
In recent decades, an increasing interest has been developed to determine the asymptotic behavior of the solutions for porous elastic systems. For example, in [8] A. Magaña and R. Quintanilla considered the system:
with positive constant \(\gamma \). They proved that the system (2.1) is exponentially stable using semigroup arguments due to Liu and Zheng [7]. On the other hand, when we consider the system obtained for the variables \(u\), \(\phi\) and \(\theta \) and we do not assume viscoelasticity \((\gamma =0)\), but we assume porousviscosity \((\tau >0)\), we obtain the following system:
Here \(m\), \(\beta \), \(c\), \(\mbox{and}\;\kappa \), are the constitutive coefficients whose physical meaning is well known and \(\theta \) is the temperature. In [3] Casas and Quintanilla discussed the asymptotic behavior of system (2.2) and they proved the exponential stability based on the methods developed by Liu and Zheng [7].
It is worth remembering that the porous elastic system with two independent dampings, one in the displacement of a solid elastic material and one in the volume fraction is exponentially stable, independently of any relation between the coefficients speed of wave propagation (see also [16–18]).
In the paper [14], M.L. Santos and D.S. Almeida Júnior studied the following porous elastic system
where the localized damping involves the sum of displacement velocity of a solid elastic material and the volume fraction velocity. Note that, \(\varOmega =(0,L)\) and \(\omega =(L_{1},L_{2})\) with \(0\leq L_{1}< L_{2} \leq L\) and \(\gamma \in L^{\infty }(\varOmega )\) is a nonnegative function satisfying:
The main contribution in [14] has been to provide a necessary and sufficient condition for the strong stability and the exponential decay of the porous elastic system with the rank-one localized damping where the boundary of the damping region must contain at least one of the end points of the spatial domain.
In short, two independent damping, one in each equation cause exponential stability of the model. On the other hand, the same damping acting on both equations causes exponential stability of the model. The open question is to know if a single damping acting on a model equation causes exponential stability, that depend on a relation between the coefficients speed of wave propagation. This issue will be addressed in this paper.
3 System with Porous Elastic Dissipation: \(\gamma =0\) and \(\tau >0\)
To start, we take \(\gamma =0\). Then the system (1.4)–(1.5) becomes the system
To above system we added the following initial conditions
and Dirichlet-Neumann boundary conditions
It is worth mentioning some papers in connection with the goal of our article. In [13] R. Quintanilla studied the system (3.1)–(3.5). The author used the Routh–Hurwitz Theorem to prove the lack of exponential decay. In another paper, J.M. Rivera and R. Quintanilla [9] proved that the energy of system (3.1)–(3.5) is controlled by a rate decay of type \(\frac{1}{t}\). Moreover, using a result due to Prüss [12] they improved the polynomial rate of decay by taking more regular initial data.
Remark 1
Is this dissipation which involves only the second equation sufficient to stabilize the full system and if so at which rate?
Importantly, the issue associated with exponential stability and optimal polynomial decay were not treated in the above papers. These issues will be addressed here.
3.1 Semigroup Settings
In this section we will show that the system (3.1)–(3.5) is well posed using the semigroup techniques. To do this, let us consider the Hilbert space
where
with inner product given by
for \(U=(u,v,\phi ,\varphi )'\), \(V=(u^{*},v^{*},\phi^{*},\varphi^{*})'\). By hypothesis, we have \(\mu \xi \geq b^{2}\). Take \(\xi_{1}\in (0, \xi ]\) such that \(\mu \xi_{1}-b^{2}=0\). Then, we obtain
This enable us to see clearly that the above \(\left( U,V\right) _{ \mathcal{H}}\) defines an inner product on ℋ and the associated norm \(\|\cdot \|_{\mathcal{H}}\) is equivalent to the usual one.
If we write \(U=\{u,u_{t},\phi ,\phi_{t}\}\) and \(U_{0}=\{u_{0},u_{1}, \phi_{0},\phi_{1}\}\) then the system (3.1)–(3.5) can be rewritten as follows
where \(\mathcal{A}:\mathcal{D}(\mathcal{A})\subset \mathcal{H}\rightarrow \mathcal{H}\) is the operator defined by
with
Furthermore for \(U=(u,v,\phi ,\varphi )'\in \mathcal{D}(\mathcal{A})\), a simple computation gives us
from where it follows that \(\mathcal{A}\) is a dissipative operator.
Then, we have the following result concerning existence and uniqueness of solutions of the problem (3.1)–(3.5).
Theorem 1
The operator \(\mathcal{A}\) generates a \(C_{0}\)-semigroup \(S(t)\) of contraction on ℋ. Thus, for any initial data \(U_{0}\in \mathcal{H}\), the problem (3.1)–(3.5) has a unique weak solution \(U\in C^{0}([0,\infty ), \mathcal{H})\). Moreover, if \(U_{0}\in \mathcal{D}(\mathcal{A})\), then \(U\) is strong solution of (3.1)–(3.5), that is, \(U\in C^{0}([0,\infty ), \mathcal{D}(\mathcal{A}))\cap C^{1}([0,\infty ),\mathcal{H})\).
Proof
It easy to see that \(\mathcal{D}(\mathcal{A})\) is dense in ℋ. Then, using the Lumer-Phillips theorem (see [11], Theorem 1.4.3), we prove that the operator \(\mathcal{A}\) generates a \(C_{0}\)-semigroup of contractions \(S(t)=e^{\mathcal{A}t}\) on ℋ. □
We introduce the energy functional \(E\) of equations (3.1)–(3.5). It is given by
It is immediate that the energy functional (3.10) is a monotone non increasing function of the time \(t\). Indeed, to see this we have the following proposition.
Proposition 1
The solution \((u,u_{t},\phi ,\phi_{t})\) of (3.1)–(3.5) with initial data in \(\mathcal{D}( \mathcal{A})\) satisfies
Therefore the energy is non increasing.
Proof
Multiplying (3.1) by \(u_{t}\) and (3.2) by \(\phi_{t}\), one easily concludes (3.11). □
From (3.11), for \(\tau \geq 0\), we obtain the energy dissipation law
It is clear that if \(\tau =0\) we obtain the energy conservation law
3.2 Exponential Decay
In this section, we will prove the semigroup associated with the system (3.1)–(3.5) is exponentially stable if and only if \(\frac{\rho }{\mu }= \frac{J}{\delta }\). To do this, we use the following result due to Gearhart-Herbst-Prüss-Huang [4] for dissipative systems (see also [6, 12]).
Theorem 2
Let \(S(t)=e^{\mathcal{A}t}\) be a \(C_{0}\)-semigroup of contractions on a Hilbert space ℋ. Then \(S(t)\) is exponentially stable if and only if
hold, where \(\rho (\mathcal{A})\) is the resolvent set of the differential operator \(\mathcal{A}\).
In order to show exponential decay, first let us consider the product in ℋ of \(U=(u,v,\phi ,\varphi )'\in \mathcal{D}( \mathcal{A})\) with the resolvent equation of \(\mathcal{A}\), that is
Then taking the real part and using inequality (3.9) we obtain
where \(F=(f^{1}, f^{2}, f^{3}, f^{4})'\in \mathcal{H}\).
The resolvent system in terms of coefficients is given by
According to Theorem 2, to prove exponential stability of contraction semigroups it is sufficient and necessary to show that conditions in (3.14) are satisfied. Now, we shall show that the resolvent is uniformly bounded over the imaginary axis. Thus, we state the following lemma.
Lemma 1
With the above notations we have
Proof
Since \(\mathcal{A}\) has a compact resolvent, its spectrum is discrete. Thus, to prove (3.20) it suffices to show that \(\mathcal{A}\) has no purely imaginary eigenvalue. First we note easily that zero is not an eigenvalue of \(\mathcal{A}\). Then, let \(\lambda \) be a non-zero real number, and let us consider \(U=(u,v,\phi ,\varphi )'\in \mathcal{D}(\mathcal{A})\) with \(\|U\|_{\mathcal{H}}=1\) and such that \(\mathcal{A}U-i\lambda U=0\).
We shall prove that \(U=(0,0,0,0)'\). Taking the inner product in ℋ from above equation with \(U\), we obtain
Therefore, from (3.15) with \(F=0\) we conclude that \(\varphi =0\). Now, from (3.18) with \(f^{3}=0\) we get \(\phi =0\). Furthermore, from (3.19) with \(f^{4}=0\) it follows that \(u_{x}=0\) and using Poincaré’s inequality result \(u=0\). Finally, from (3.16) with \(f^{1}=0\) we obtain \(v=0\). This implies that \(U=0\). But this is a contradiction, therefore there is no purely imaginary eigenvalues. □
Remark 2
In particular this result implies that the semigroup is strongly stable, that is
where \(S(t):=e^{\mathcal{A}t}\) is the \(C_{0}\)-semigroup of contractions on Hilbert space ℋ and \(U_{0}\) is the initial data.
Now, we will prove that the system (3.1)–(3.5) is exponentially stable for the condition \(\frac{\rho }{\mu }= \frac{J}{ \delta }\). This proof involves some auxiliary lemmas.
Lemma 2
There exists a positive constant \(M\) such that
and
for \(|\lambda |\) large enough.
Proof
Multiplying equation (3.18) by \(\bar{\phi }\) and integrating on \((0,L)\), we have
Applying Poincaré and Young inequalities and taking into account the inequality (3.15) one has the inequality (3.21).
Now, multiplying equation (3.19) by \(\bar{\phi }\) and integrating on \((0,L)\), we get
Substituting \(\phi \) given by (3.18) into \(I_{1}\) and integrating by parts we get
Then, again substituting \(\phi \) given by (3.18) this time into \(I_{2}\) and using boundary conditions (3.5) we have that
From inequality (3.15) we conclude the proof of lemma. □
Lemma 3
There exists a positive constant \(M\) such that
for \(|\lambda |\) large enough.
Proof
Multiplying equation (3.19) by \(\frac{\mu }{b}( \overline{u _{x}+\phi }) \) and integrating by parts on \((0,L)\), we have
From (3.18) into \(I_{3}\) and using boundary conditions given by (3.5), we obtain
On the other hand, from (3.16) we have
from where integrating by parts it follows that
Substituting (3.25) into \(I_{4}\), we can rewrite (3.24) as
From (3.17), we have
Replacing (3.27) into \(I_{5}\) on equation (3.26), results
from where after some simplifications it follows that
Therefore, with the help of the inequalities (3.15) and (3.21), since it \(\mu \xi \geq b^{2}\), one has the conclusion of lemma. □
Lemma 4
There exists a positive constant M such that any solution of system (3.1)–(3.5) satisfies
Proof
Multiplying equation (3.17) by \(\bar{u}\) and integrating by parts on \((0,L)\) we have
From (3.16) and by boundary conditions (3.5), we get
from where we have the conclusion of lemma. □
Theorem 3
The semigroup associated with system (3.1)–(3.5) is exponentially stable if and only if \(\frac{\rho }{\mu }= \frac{J}{ \delta }\).
Proof
which implies,
from there the exponential decay holds.
To show that the condition is also necessary we will proceed as follows: we will argue by contradiction, that is, we will show that there exists a sequence of values \((\lambda_{n})\subset {\mathbb{R}}\) with \(\lim_{n \rightarrow \infty }|\lambda_{n}|=\infty \) and \(U_{n}=(u_{n},v_{n},\phi_{n},\varphi_{n})'\) for \(F_{n}=(f_{n}^{1}, f _{n}^{2}, f_{n}^{3}, f_{n}^{4})'\subset {\mathcal{H}}\) such that \((i\lambda_{n}I-{\mathcal{A}})U_{n}=F_{n}\) where \(F_{n}\) is bounded in ℋ, however \(\|U_{n}\|_{\mathcal{H}}\) tends to infinity.
We choose \(F\equiv F_{n}\) with \(F=(0,f^{2},0,0)'\) where \(f^{2}=\sin ( \alpha \lambda x ) \), with
Because of the boundary conditions, we can suppose that
where \(A\) and \(B\) depend on \(\lambda \) and will be determined explicitly in what follows. Therefore, the solutions of system (3.16)–(3.19) is equivalent to finding \(A\) and \(B\), such that
Using definition of \(\alpha \), it results
Solving (3.29), we obtain that B is
Substituting (3.31) into (3.30), we get
Finally, suppose that \(\frac{\rho }{\mu }\neq \frac{J}{\delta }\), to obtain
Then, applying Theorem 2, our conclusions follows. □
3.3 Polynomial Decay
Now, we prove that the solution of system (3.1)–(3.5) decays polynomially to zero as time goes to infinity when \(\frac{\rho }{\mu }\neq \frac{J}{\delta }\). Moreover, we show that this rate of decay is optimal in the sense that the rate \(1/\sqrt{t}\) cannot be improved. To this end we apply the following result due to Borichev and Tomilov [2].
Theorem 4
Let \(S(t)\) be a bounded \(C_{0}\)-semigroup on a Hilbert space ℋ with generator \(\mathcal{A}\) such that \(i\mathbb{R} \subset \rho (\mathcal{A})\). Then
So in order to prove the result of polynomial decay, first we present the following auxiliary lemma.
Lemma 5
There exists a positive constant \(M\) such that
for \(|\lambda |\) large enough.
Proof
From equation (3.19) we have
Integrating by parts and using boundary conditions (3.5) we get
Using (3.16) and (3.18) in the above equation, results
from where it follows that
Therefore, from equations (3.15) and (3.22), we have the conclusion of lemma. □
Theorem 5
Let us suppose that \(\frac{\delta }{J}\neq \frac{\mu }{\rho }\), then the semigroup associated with system (3.1)–(3.5) is polynomially stable and
Moreover, this rate of decay is optimal, in the sense that decay must be slower than \(t^{-\frac{1}{2-\varepsilon }}\) for any \(\varepsilon >0\).
Proof
From Lemmas 2, 3, 4 and equation (3.15), we obtain
where \(C\) is a positive constant.
Combining the above inequality with the Lemma 5, since it \(\frac{\delta }{J}\neq \frac{\mu }{\rho }\), we get
for \(|\lambda |\) large enough, it follows that
which is equivalent to
Then, using Theorem 4 one gets the first conclusion of theorem. To prove that the rate is optimal we use same ideas of the proof of Theorem 3 (see Theorem 5.3 in [1] for more details). □
4 System with Elastic Dissipation: \(\gamma >0\) and \(\tau =0\)
To start, we take \(\tau =0\). Then the system (1.4)-(1.5) becomes the system
We added to system above the following initial conditions
and Dirichlet-Neumann boundary conditions
Remark 3
It is important to emphasize that the above system with elastic damping only was not considered in the literature. Thus, the results obtained in this section are new and which is a breakthrough for these models.
4.1 Semigroup Settings
We begin with the issue of wellposedness of solutions corresponding to the system (4.1)–(4.5). Therefore, we have that the solutions of this problem can be generated by means of a semigroup of contractions. In fact, this semigroup is defined in
by operator
with inner product given by
for \(U=(u,v,\phi ,\varphi )'\), \(V=(u^{*},v^{*},\phi^{*},\varphi^{*})'\). It is worth recalling that this product is equivalent to the usual product in the Hilbert space ℋ.
The domain of \(\mathcal{A}\) is
By a standard reduction order method, (4.1)–(4.5) can be rewritten as the first order evolution equation
where \(U=\{u,u_{t},\phi ,\phi_{t}\}\) and \(U_{0}=\{u_{0},u_{1},\phi _{0},\phi_{1}\}\).
It is not difficult to see that the operator \(\mathcal{A}\) is dissipative in the energy space ℋ, that is
from where we conclude that
From the Lumer–Phillips theorem [11], we have that \(\mathcal{A}\) is an infinitesimal generator of a contraction \(C_{0}\)-semigroup.
Theorem 6
The operator \({\mathcal{A}}\) generates a \(C_{0}\)-semigroup \(S(t)\) of contraction on ℋ. Thus, for any initial data \(U_{0} \in {\mathcal{H}}\), the system (4.1)–(4.5) has a unique weak solution \(U\in C^{0}([0,\infty [;{\mathcal{H}})\). Moreover, if \(U_{0}\in \mathcal{D}({\mathcal{A}})\), then \(U\) is strong solution of (4.1)–(4.5), that is \(U\in C^{0}([0, \infty [;\mathcal{D}({\mathcal{A}}))\cap C^{1}([0,\infty [;{\mathcal{H}})\).
Let the energy \(E\) be defined as in Sect. 3.1, that is,
Thus, the above energy functional is a monotone non increasing function of the time \(t\).
Proposition 2
The solution \((u,u_{t},\phi ,\phi_{t})\) of (4.1)–(4.5) with initial data in \(\mathcal{D}( \mathcal{A})\) satisfies
for all \(t\geq 0\) and \(\gamma >0\).
4.2 Exponential Decay
In this section, we will prove the exponential stability of system (4.1)–(4.5) using the condition \(\frac{\rho }{ \mu }=\frac{J}{\delta }\), otherwise the system has lack of exponential decay. To start consider the resolvent equation \(i\lambda U - \mathcal{A}U = F\) in terms of its components can be rewritten as
Now, following Theorem 2 we will show that the resolvent is uniformly bounded over the imaginary axes.
Lemma 6
With the above notation, we have
Proof
Since \(( I-\mathcal{A} ) ^{-1}\) is compact in ℋ, to prove that \(i\mathbb{R}\subset \rho (\mathcal{A})\) it is enough to show that \(\mathcal{A}\) has no purely imaginary eigenvalues. Let us reasoning by contradiction. Let us suppose that there exists \(\lambda \in \mathbb{R}^{*}\) such that \(i\lambda \) is an eigenvalue with eigenvector \(U=(u,v,\phi ,\varphi )'\neq 0\) satisfying \(i\lambda U-\mathcal{A}U=0\). From (4.9), with \(F=0\) we have that \(v=0\). Then, from (4.11) we get \(u=0\). Now, from (4.12) we obtain \(\phi_{x}=0\) and using Poincaré’s inequality results \(\phi =0\). Finally, from (4.13) we get \(\varphi =0\). Therefore, \(U=0\) which is a contradiction. □
Lemma 7
There exists a positive constant \(M\) such that any strong solution of system (4.1)–(4.5) satisfies
where \(C_{1}\) is a positive constant and for \(|\lambda |\) large enough.
Proof
We multiply equation (4.12) by \(\bar{u}\) and the result integrate by parts on \((0,L)\). Then, using (4.11), we get
Because \(\mu \xi \geq b^{2}\) we get
Now, we integrate by parts and we use equation (4.11). Then, applying Poincare’s inequality, we have that
where \(C_{1}\) is a positive constant. Therefore, from inequality (4.9), we conclude the proof of lemma. □
The next lemma gives the important relation between the coefficients for obtaining the necessary and sufficient condition for exponential stability of the system (4.1)–(4.5).
Lemma 8
There exists a positive constant \(M\) such that
for \(|\lambda |\) large enough.
Proof
We multiply (4.14) by \(\frac{\mu }{b}\bar{u}_{x}\) and the result we integrate by parts on \((0,L)\) to obtain
From (4.12), we have that
Substituting (4.19) in (4.18), we obtain
Now, from (4.11) and (4.13), we can get
Then, substituting (4.21) in (4.20), it results
From (4.16) we have that
where \(C_{2}\) is a positive constant. Then, replacing (4.23) into (4.22) and using Young’s inequality, we get
Therefore, from (4.9) one has the conclusion of lemma. □
Lemma 9
There exists a positive constant \(M\) such that
Proof
Multiplying (4.14) by \(\bar{\phi }\) and integrating by parts on \((0,L)\), we get
Then, using (4.13) in equation (4.25), we obtain
from where, using (4.9) we have the conclusion on lemma. □
Theorem 7
The semigroup \(S(t) = e^{\mathcal{A}t}\) associated with system (4.1)–(4.5) is exponentially stable if and only if \(\frac{\rho }{\mu }=\frac{J}{\delta }\).
Proof
From Lemmas 7, 8 and 9 we obtain
for \(|\lambda |\) large enough, we conclude that
From there the exponential decay holds.
To show that the condition is also necessary let us assume that there exists \(U\in \mathcal{H}\) such that \(\|U\|_{\mathcal{H}} \neq 0\). Without loss of generality we can take \(f^{1}=f^{2}=f^{3}=0\) and \(f^{4}=\cos ( \alpha \lambda x ) \), where
Now taking into account the boundary conditions given in equation (4.5), we can suppose that
Therefore, system (4.11)–(4.14) is equivalent to
from where, using the definition of \(\alpha \), we obtain
From where, since that \(\frac{\rho }{\mu }\neq \frac{J}{\delta }\) and \(\mu \xi \geq b^{2}\), we have
Therefore, we conclude the proof of theorem. □
4.3 Polynomial Decay
Now, we prove that the solution of system (4.1)–(4.5) decays polynomially to zero as time goes to infinity when \(\frac{\rho }{\mu }\neq \frac{J}{\delta }\).
Lemma 10
There exists a positive constant \(M\) such that
for \(|\lambda |>1\) large enough.
Proof
We note that, by using Young’s inequality, the following inequality holds
for \(|\lambda |>0\). Furthermore, from Lemma 8, we have that
which implies that
Then, substituting (4.30) into (4.29), we get
From inequality (4.9) we conclude the proof of lemma. □
Theorem 8
If \(\frac{\rho }{\mu }\neq \frac{J}{\delta }\) then the semigroup associated with system (4.1)–(4.5) satisfies
Moreover, this rate of decay is optimal, in the sense that decay must be slower than \(t^{-\frac{1}{2-\varepsilon }}\) for any \(\varepsilon >0\).
Proof
To prove this result we suppose that \(\frac{\rho }{\mu } \neq \frac{J}{\delta }\) and we combine Lemmas 7, 8, 9 and 10. After that, we use the same ideas as in the proof of Theorem 5. Therefore it will be omitted here. The proof is complete. □
5 Numerical Approach
In this section we focus on numerical-computational aspects of systems (3.1)–(3.2) and (4.1)–(4.2). We consider a numerical scheme using finite difference and we reproduce numerically the analytical results established on exponential decay. We are concerned mainly on reproducing the results reached in Theorems 3 and 7. That is to say, if \(\frac{\rho }{\mu }=\frac{J}{\delta }\) holds, then the dissipative systems treated here get the exponential decay of solutions. Otherwise, we have lack of exponentially stable.
Here we study the problems in a single system, which takes into account both \(\gamma u_{t}\) and \(\tau \phi_{t}\) dissipations. Then, we choose the constant \(\gamma \) and \(\tau \), conveniently, if we want to study the system (3.1)–(3.2) or (4.1)–(4.2).
5.1 Fully-Discrete Scheme in Finite Difference
Given \(K,N\in \mathbb{N}\) we set \(\Delta x=\frac{L}{K+1}\) and \(\Delta t=\frac{T}{N+1}\) and we introduce the nets
with \(x_{k}=k\Delta x\) and \(t_{n}=n\Delta t\) for \(k=0,1,\ldots,K+1\), and \(n=0,1,\ldots,N+1\).
Taking an explicit scheme using finite differences, our problem consists of finding \((u_{k}^{n},\phi_{k}^{n})\) satisfying the following numerical scheme
for all \(k=1,\ldots , K\) and \(n=1,\ldots , N\). To simplicity our numerical calculations, we consider the homogeneous boundary conditions given by
and initial conditions given by
The discrete energy of system (5.2)–(5.5) is given by
which is a discretization of the continuous energy given by (3.10).
The totally discrete equations are all consistent and of order \(\mathcal{O}(\Delta x^{2},\Delta t^{2})\). Besides, they converge with \(\Delta x,\Delta t\to 0\) if and only if they are stable. For issues related to numerical stability, we have to make a more elaborate analysis based on references by Wright [19, 20]. At this point, it is worth to mention that discrete energy \(E^{n}\) given by (5.6) is positive since that \(\Delta t\leq \min \{ \Delta x\sqrt{\frac{J}{ \delta }}, 2\sqrt{\frac{J}{\xi }}, \Delta x \sqrt{\frac{2\rho }{ \mu }} \} \) (see [15] for details). Thus, this restriction for \(\Delta t\) is a candidate to be stability criterion of system (5.2)–(5.5).
The proposition below establishes the law of dissipation in the numerical context analogous to continuous case (see Propositions 1 and 2).
Proposition 3
Let \((u_{k}^{n},\phi_{k}^{n})\) be a solution of the finite difference scheme (5.2)–(5.5) with \(\gamma ,\tau > 0\). Then for all \(\Delta t\) and \(\Delta x\), the discrete rate of change of energy of the numerical scheme (5.2)–(5.5) at the instant of time \(t_{n}\) is given by
for all \(n=1,\ldots,N,N+1\).
Proof
As in the continuous case the technical procedure for obtaining the energy \(E^{n}\) is analogous to, we use the multipliers at discrete level given by \(( \frac{u_{j}^{n+1}-u_{j}^{n-1}}{2\Delta t} ) \) and \(( \frac{\phi_{j}^{n+1}-\phi_{j}^{n-1}}{2\Delta t} ) \) and we organize the results in order to make up the difference \(E^{n}-E^{n-1}\). The proof is too long and we omit it here. □
5.2 Numerical Simulations
In this section, we focus on the numerical scheme (5.2)–(5.5) and its energy \(E^{n}\) to illustrate by means of the numerical experiments the analytical results established in previous sections. We emphasize that we are not concerned with issues of numerical convergence between exact solution and numerical solution and the respective rate of convergence.
For numerical example, we consider \(L=1\), \(T=2\) and take in account that \(\mu \xi \geq b^{2}\). In the initial conditions we assume that
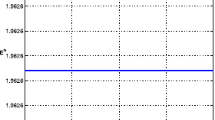
The accuracy of the numerical scheme (5.2)–(5.5) can be seen through of the energy conservation law. Indeed, taking \(\gamma =\tau = 0\) in (5.7) we obtain that \(E^{n} = E^{0}\), \(n = 1,2,\dots ,N + 1\), as we can see in Fig. 1. In Fig. 2 we have the full damped case, in which we consider \(\gamma >0\) and \(\tau >0\). In both cases, we have used \(\frac{\delta }{J}\neq \frac{\mu }{\rho }\).

Conservative case

Full damped
5.3 Case 1: \(\tau >0\) and \(\gamma =0\)
As we can see in Figs. 3 and 4, the numerical experiments are in qualitative agreement with the analytical results established in our work. That is to say, if \(\frac{\delta }{J}=\frac{\mu }{\rho }\) we obtain the exponential decay, on the contrary, there exists a lack of exponential decay (see Theorem 3). Here, in both cases, we take \(E^{n}=E^{n}/E^{0}\).

\(\frac{\delta }{J}\neq \frac{\mu }{\rho }\)

\(\frac{\delta }{J}=\frac{\mu }{\rho }\)
5.4 Case 2: \(\tau =0\) and \(\gamma >0\)
The results of this section are also in agreement with the analytical results obtained in the previous sections, in particular Sect. 4. As can be seen in the following figures, the energy decay is slower for cases where we have \(\frac{\delta }{J}\neq \frac{\mu }{ \rho }\). In Fig. 5, the graphics can be interpreted as a typical behavior of polynomial decay. Note that after 2 seconds the curve \(E^{n}/E^{0}\) tends to 0.1. On the other hand, for \(\frac{ \delta }{J}=\frac{\mu }{\rho }\), in Fig. 6, taking in account the same simulations data, the decay is more fast.

\(\frac{\delta }{J}\neq \frac{\mu }{\rho }\)

\(\frac{\delta }{J}=\frac{\mu }{\rho }\)
References
Almeida Júnior, D.S., Santos, M.L., Muñoz Rivera, J.E.: Stability to weakly dissipative Timoshenko systems. Math. Methods Appl. Sci. 36, 1965–1976 (2013)
Borichev, A., Tomilov, Y.: Optimal polynomial decay of functions and operator semigroups. Math. Ann. 347(2), 455–478 (2009)
Casas, P.S., Quintanilla, R.: Exponential decay in one-dimensional porous-thermo-elasticity. Mech. Res. Commun. 32, 652–659 (2005)
Gearhart, L.M.: Spectral theory for contraction semigroups on Hilbert space. Trans. Am. Math. Soc. 236, 385–394 (1978)
Goodman, M.A., Cowin, S.C.: A continuum theory for granular materials. Arch. Ration. Mech. Anal. 44, 249–266 (1972)
Huang, F.: Characteristic conditions for exponential stability of linear dynamical systems in Hilbert spaces. Ann. Differ. Equ. 1, 43–56 (1985)
Liu, Z., Zheng, S.: Semigroups Associated with Dissipative Systems. Chapman and Hall/CRC, Boca Raton (1999)
Magaña, A., Quintanilla, R.: On the time decay of solutions in one-dimensional theories of porous materials. Int. J. Solids Struct. 43, 3414–3427 (2006)
Muñoz Rivera, J.E., Quintanilla, R.: On the time polynomial decay in elastic solids with voids. J. Math. Anal. Appl. 338, 1296–1309 (2008)
Nunziato, J.W., Cowin, S.C.: A nonlinear theory of elastic materials with voids. Arch. Ration. Mech. Anal. 72, 175–201 (1979)
Pazy, A.: Semigroups of Linear Operators and Applications to Partial Differential Equations. Springer, New York (1983)
Prüss, J.: On the spectrum of \(C_{0}\)-semigroups. Trans. Am. Math. Soc. 284, 847–857 (1984)
Quintanilla, R.: Slow decay for one-dimensional porous dissipation elasticity. Appl. Math. Lett. 16, 487–491 (2003)
Santos, M.L., Almeida Júnior, D.S.: On porous-elastic system with localized damping. Z. Angew. Math. Phys. 67(3), 63 (2016)
Santos, M.L., Campelo, A.D.S., Almeida Júnior, D.S.: On the decay rates of porous elastic systems. J. Elast. (2016). doi:10.1007/s10659-016-9597-y
Soufyane, A.: Energy decay for porous-thermo-elasticity systems of memory type. Appl. Anal. 87, 451–464 (2008)
Soufyane, A., Afilal, M., Chacha, M.: Boundary stabilization of memory type for the porous-thermo-elasticity system. Abstr. Appl. Anal. 2009, 280790 (2009)
Soufyane, A., Afilal, M., Chacha, M.: General decay of solutions of a linear one-dimensional porous-thermoelasticity system with a boundary control of memory type. Nonlinear Anal., Theory Methods Appl. 72, 3903–3910 (2010)
Wright, J.P.: A mixed time integration method for Timoshenko and Mindlin type elements. Commun. Appl. Numer. Methods 3, 181–185 (1987)
Wright, J.P.: Numerical stability of a variable time step explicit method for Timoshenko and Mindlin type structures. Commun. Numer. Methods Eng. 14, 81–86 (1998)
Acknowledgements
The first author has been partially supported by the CNPq Grant 302899/2015-4 and CNPQ Grant 401769/2016-0, Universal Project, 2016. The second author thanks to PNPD/CAPES for his financial support. The third author has been partially supported by the CNPq Grant 311553/2013-3 and CNPQ Grant 458866/2014-8, Universal Project, 2014.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Santos, M.L., Campelo, A.D.S. & Almeida Júnior, D.S. Rates of Decay for Porous Elastic System Weakly Dissipative. Acta Appl Math 151, 1–26 (2017). https://doi.org/10.1007/s10440-017-0100-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10440-017-0100-y