
Abstract
Generalized Kelvin–Voigt and Maxwell models using Prony series are some of the most well-known models to characterize the behavior of polymers. The simulation software for viscoelastic materials generally implement only some material models. Therefore, for the practice of the engineer, it is very useful to have formulas that establish the equivalence between different models. Although the existence of these relationships is a well-established fact, moving from one model to another involves a relatively long process. This article presents a development of the relationships between generalized Kelvin–Voigt and Maxwell models using the aforementioned series and their respective relaxation and creep coefficients for one and two summations. The relationship between the singular points (maximums, minimums and inflexion points) is also included.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The mathematical models that characterize mechanical properties of materials are a continuing issue in engineering research. The simplest and more friendly models for this proposal are the Kelvin–Voigt and Maxwell models [1,2,3,4,5] because of their linearity. The models are not equivalent: the first can explain creep, but not relaxation phenomena, and the second does the opposite. Both models correspond to materials that show only one characteristic time. In order to fit a model to materials showing several characteristic times, generalized linear viscoelastic models are used, connecting several Kelvin–Voigt or Maxwell elements. Every generalized Maxwell (GM) model has an equivalent generalized Kelvin–Voigt (GKV) model. These models correspond to the use of Prony series to adjust creep and relaxation functions. This is a usual option in a variety of engineering applications involving viscoelastic materials [6,7,8,9,10,11,12,13,14,15,16], and the identification of the parameters of the material models is nowadays still a challenging issue [17,18,19,20,21,22,23,24,25,26,27,28].
The engineering practitioner, when using different tools for calculation, must use these viscoelastic models under a specific form [29]. This fact can be relatively important, because commercial software is usually implemented with only some specific viscoelastic models. Therefore, it is necessary for the user to know the conversions to pass from one model to another. Although the existence of these relationships is a well-known fact [4, 5, 30,31,32], it usually implies some numerical methods. A number of these numerical methods have been developed and published [32,33,34,35,36,37]. A recent work [37] offers an interconversion method between the different models by explicit expressions, except for the determination of the zeros of certain polynomials. For some cases it is possible to establish quite explicit formulas of interconversion, which are presented in Ref. [4], but only for the simplest cases.
This work presents the complete set of explicit expressions of the relationships between GKV and GM models of first and second, as well as relaxation and creep coefficients. To the best of our knowledge, there is not a set of explicit formulas published as we propose. From this study, it is also possible to study singular points as maximums, minimums or inflexion points. These relationships allow to move from one model to another equivalent easily and quickly.
2 Characterization of Prony series
In this section, the GKV and GM models as combination of springs and dashpots are characterized.
In the GKV model, only creep, storage and loss compliances are presented. The other way round occurs in the GM model, which presents values for relaxation, storage and loss moduli. As the number of terms n in the models is increased, the equations found in the Laplace domain are more complicated to express in the time or frequency domains. Only in two cases (in the GKV model with compliances and in GM model with moduli), these transformations are simple, since every term in the Laplace domain can be separately transformed in an inverse exponential in the time domain.
The difficulty arises when passing from the coefficients of the creep function to the relaxation moduli, for example. Conversely, the same happens when it is interesting to obtain the compliance coefficients from the relaxation function. In this work, these interconversions are solved when n = 1 or n = 2, in an explicit form. However, in other cases, with n > 2, the expressions as a function of n in the Laplace domain contain a denominator with a polynomial equation of degree n. There is no expression to pass easily from Laplace domain to time domain when a polynomial equation of degree three or more appears in the denominator. For this reason, all coefficients are just solved for n = 1 and n = 2.
In the following sub-sections, the explicit expressions to obtain the coefficients of the relaxation function from the GKV model for n = 1 and n = 2 have been developed. Also, explicit expressions for the creep coefficients from the GM model up to second order have been obtained. Moreover, the general expressions of compliances for GKV models and moduli for GM models are shown.
2.1 GKV model
A Kelvin–Voigt element is a set of one spring and one dashpot connected in parallel. The GKV model is a series of Kelvin–Voigt elements with a spring, all them connected in series (Fig. 1). The elastic (E) and viscous (η) parameters are defined as usual
where σ is the stress and ε is the strain, and the prime indicates the time derivative. The stress along the model is the same for each block in Fig. 1, and the total strain of the model results of the strain summation of every block.

GKV model of order n
2.1.1 First order GKV model
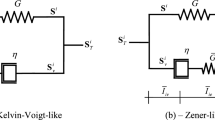
By definition, the GKV model of first order has the representation of Fig. 2. This is a commonly used material model and is also known as a linear standard model, or three-parameter model.

GKV model with n =1
Considering Eq. (1), the Laplace transform leads to
And, taking \({\mathcal{L}}\left[ \sigma \right] = E_{{0_{K} }} \cdot {\mathcal{L}}\left[ {\varepsilon_{0} } \right]\), one has
Then, the mechanical resistance Z, the transfer function of the system, considering the stress as the input and the strain as the output is
Also, from Eq. (3), the differential equation associated to the GKV model with n = 1 is
The relaxation modulus is the stress response for a constant strain. This is \({\mathcal{L}}\left[ \varepsilon \right] = 1/s\) in the Laplace domain. Therefore, the relaxation modulus is the transfer function from strain to stress. This is the inverse of the product between the mechanical resistance and s. Through conversion from Laplace domain to time domain, the relaxation modulus for the GKV model with n = 1 gives
with
The creep compliance in the Laplace domain is the strain of the material under a constant unitary stress: \(\sigma = 1 , t > 0\). This means \({\mathcal{L}}\left[ \sigma \right] = 1/s\). Therefore, \(Y\left( s \right) \cdot J\left( s \right) = s^{ - 2}\), as it is pointed out in Ref. [37]. From Eq. (3), and converting from Laplace domain to time domain, the creep compliance J for the GKV model with n = 1 is
with
The frequency response function can be easily found from the expression of the mechanical resistance Eq. (4) just changing the s parameter by iω, where “i” is the imaginary unit. After algebraic operation, the result is a complex function of ω. This function of the angular frequency ω describes the response (strain) of the material under harmonic stresses. The storage compliance (J′) is the real part of this number
The loss compliance (J″) is the absolute value of the imaginary part
Storage and loss moduli, in the frequency domain, are defined as the real and imaginary part of the inverse of the creep compliance. This is the response (stress) of the material under harmonic strains. The storage modulus is
The loss modulus is
The tangent of the phase angle is the ratio of loss modulus (Eq. (9b)) to storage modulus (Eq. (9a))
2.1.2 Second order GKV model
Adding a new Kelvin–Voigt element, the GKV model with n = 2 (second order) has the representation of Fig. 3.

GKV model with n = 2
Following a deduction analogous to that of the previous section, for the mechanical resistance, the GKV model with n = 2 gives
The differential equation for the GKV model with n = 2, using Laplace transform, presents the following form
The creep compliance is \(Z\left( s \right)/s\), which is, for the time domain
with
Following the same procedure as explained to obtain the relaxation modulus in Sect. 2.1.1, the relaxation modulus for the GKV model with n = 2 is defined as
For this model, when analyzing the relaxation coefficients, these coefficients are found as a function of the auxiliary coefficients used in the previous expressions. Creep coefficients can be related to spring and dashpot parameters
with
Following the same procedure as explained to obtain the storage modulus in Sect. 2.1.1, the storage modulus and the loss modulus are
where
The storage compliance and the loss compliance are, respectively
The tangent of the phase angle is the ratio of loss modulus (Eq. (19)) to storage modulus (Eq. (18))
2.1.3 GKV model with n elements
This subsection is devoted to the general case (Fig. 1) with n Kelvin–Voigt elements. The elastic (E) and viscous (η) parameters are defined as usual Eq. (1). The stress along the model is the same for each block in Fig. 3, and the total strain of the model results of the strain summation of every block
For every block, i = 1, 2, …, n, the stress is
Taking Laplace transformation of Eqs. (24) and (25) and combining them, one can define the mechanical resistance Z, the transfer function of the system (considering the stress as the input and the strain as the output)
Coming back to time domain, one can obtain the following differential equation
The constant values in Eq. (27) can be found in Appendix A. 1.
The creep compliance in the Laplace domain is the strain of the material under a constant unitary stress: \(\sigma = 1 , t > 0\). This means \({\mathcal{L}}\left[ \sigma \right] = 1/s\). From Eq. (26), and converting from Laplace domain to time domain, the creep compliance J for the GKV model results
with
As in previous sections, the frequency response function can be found from the expression of the mechanical resistance Eq. (26). The storage compliance (J′) is the real part of this number
The loss compliance (J″) is the absolute value of the imaginary part
2.2 GM model
A Maxwell element is a set of one spring and one dashpot connected in series. The GM model (also known as Maxwell–Wiechert model) is a set of n Maxwell elements with a spring, all connected in parallel (Fig. 4).

GM model
The elastic (E) and viscous (η) components are defined as usual Eq. (1). The strain along the model is the same for each block in Fig. 4, and the total stress of the model results of the stress summation of every block.
2.2.1 First order GM model
The GM model with n = 1 has the representation of Fig. 5. It is also known as the Zener model.

GM model with n = 1
The mechanical resistance Z is the transfer function of the system, considering the stress as the input and the strain as the output
The differential equation for the GM model with n = 1, leads to
As in the previous section, the relaxation modulus can be determined by the relationship \(Z\left( s \right) \cdot Y\left( s \right) = 1/s\)
Also, the storage modulus and the loss modulus are the real and imaginary parts of \(Y\left( {{\text{i}}\omega } \right)\)
with
The tangent of the phase angle is the ratio of loss modulus (Eq. (36)) to storage modulus (Eq. (35))
Since \(J\left( s \right) = Z\left( s \right)/s\) and \(J\left( {{\text{i}}\omega } \right) = J^{\prime}\left( \omega \right) + {\text{i}} \cdot J^{\prime\prime}\left( \omega \right)\), the creep compliance, the storage compliance and the loss compliance are
with
2.2.2 Second order GM model
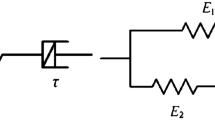
The GM model with n = 2 has the representation of Fig. 6.

GM model with n = 2
The mechanical resistance of the GM model with n = 2 is
The differential equation for this model, using Laplace transform, shows the following expression
The relaxation modulus, the storage modulus and the loss modulus, are defined as follows
with
For this model, when analyzing the creep coefficients, these coefficients are found as a function of auxiliary coefficients used in the previous expressions. Creep coefficients can be related to spring and dashpot parameters. The creep compliance, the storage compliance and the loss compliance are
The tangent of the phase angle is the ratio of loss modulus (Eq. (47)) to storage modulus (Eq. (46))
with
with
2.2.3 GM model with n elements
The mechanical resistance of the GM model, in the frequency domain, is defined as follows
The differential equation of the GM model, using Laplace transforms, presents the following form
The values of the constants in Eq. (56) can be found in Appendix A.1.2.
The relaxation modulus, the storage modulus and the loss modulus for the GM model are defined
with
3 Plots
It is possible to plot the relaxation modulus vs time, or the creep compliance vs. time, for every viscoelastic model. Also, it is possible to plot storage/loss modulus/compliance and phase angle in the frequency domain. These plots, for each viscoelastic material model, related to a differential Eqs. (27) and (56), have some characteristics that can be determined and can allow to recognize the kind of model one is dealing with.
It is worth noting that the plots for GKV and GM models with n = 1 and with n = 2 are the same, as a function of either relaxation or creep coefficients, regardless of whether they are subsequently expressed as a function of the creep or relaxation coefficients. The reason is that, although the dispositions of springs and dashpots are different for each model, the general expression for moduli and compliances for this number of terms is identical, expressed as relaxation or creep coefficients, respectively.
In order to draw the plots, first the mechanical parameter in question is represented as a function of time or frequency. So, a general plot is represented without any fixed values in both axes. The coefficients of the equations are expressed in a general way.
Once the plot is represented, the maximums and minimums are found with the first order derivative of the mathematical expression, set equal to zero (Appendices A.2.1.1 and A.2.2.1). The inflexion points are found with the second order derivative of the previous mathematical expression also set equal to zero (Appendices A.2.1.2 and A.2.2.2).
Relaxation moduli and creep compliances do not have maximums, minimums or inflexion points. In these cases, the characteristic points are just at zero and at infinite time.
It is important to emphasize that, for models of order greater than two, the determination of the relative extrema and inflexion points depends on the obtaining of the roots of a polynomial of grade greater than four. This avoids getting analytical expressions for these models.
3.1 Models with n = 1
Figure 7 shows a sketch of the characteristic plots of relaxation modulus and creep compliance along the time (Eqs. (6a), (7a), (34) and (39). Both curves are monotonic. The initial values and the limit values for time tending to infinity are characteristics of the model.

Relaxation modulus/creep compliance vs. time: characteristic values. Models with n = 1
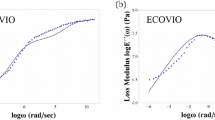
Figure 8a shows the plot of the storage modulus versus frequency (Eqs. (9a) and (35)): there is one inflexion point and the limits at infinity are also determined. The plot of the loss modulus vs. frequency (Eqs. (9b) and (36)) has also one inflexion point and one maximum (Fig. 8b). The loss modulus tends to zero when the frequency tends to infinity. The plots of the storage and loss compliances (Eqs. (8a), (8b), (40), (41)) have a quite similar structure (Fig. 8a, b).

a, b Storage/loss modulus and c, d compliance vs. frequency: characteristic values. Models with n = 1. The horizontal axes are in logarithmic scale
Finally, Fig. 9 plots the phase angle along the frequency (Eqs. (10) and (38)). This plot has also a maximum and one inflexion point (and another theoretical one for frequency zero).

Phase angle vs. frequency: characteristic values. Models with n = 1. The horizontal axes is in logarithmic scale
3.2 Plots with n = 2
The general plots between the different mechanical properties versus time or frequency are represented in Figs. 10–12, for the cases when there are two summations in the corresponding Prony series. Figure 10 shows the relaxation modulus and the creep compliance vs. time (Eqs. (13), (15), (45) and (49)). Both curves are monotonic and have a simple value when time tends to infinity.

a Relaxation modulus and b creep compliance vs. time: characteristic values. Models with n = 2

Sketches of typical graphs of a, b storage/loss modulus and c, d compliance vs. frequency for models with n = 2. The arrows mark the inflexion points. The horizontal axes are in logarithmic scale

Sketch of a typical graph of the tangent of phase angle vs. frequency for models with n = 2. The arrows mark the inflexion points. The horizontal axes are in logarithmic scale
From the expression of the storage modulus ((Eqs. (18) and (46)), one can calculate the limit values at frequency zero and tending to infinity. The function is strictly increasing so there are no relative extrema. There are three inflexion points (Fig. 11a) that can be calculated by setting the second derivative of Eqs. (18) and (46) equal to zero. This leads to the fourth grade equation (A.10 found in Appendix A.2.2.2, set equal to zero)
where \(x = \omega^{2}\). This equation can be solved in explicit form. The resulting frequencies for the inflexion points are (Appendix A.3.2)
The loss modulus (Fig. 11b) has two maximums and one minimum, with three inflexions points (Eq. (A.6) in Appendix A.2.2.1). The maximums and the minimum can be localized by deriving the Eqs. (19) and (47) and their frequencies are the roots of the cubic equation
where \(x = \omega^{2}\). This equation can be solved in explicit form. The resulting frequencies are (Appendix A.3.1)
From Eqs. (19) and (47), using Eq. (A.11) (in Appendix A.2.2.2) set equal to zero, where \(x = \omega^{2}\), one obtains the following expression
The inflexion points correspond to the roots of Eq. (65). This leads (see Appendix A.3.2) to the next frequencies for the three inflexion points (Fig. 11b)
where the roots of \(x_{i} , i = 2,3,4\) have explicit expressions (Eqs. (A.20)–(A.22)); note that the first root, \(x_{1}\) (Eq. (A.19)) is always negative. Figure 11c, shows the sketch of a typical graph for the storage compliance. This graph is defined by three inflexion points. By deriving Eqs. (21) and (50) twice (Eq. (A.12), in Appendix A.2.2.2), and setting equal to zero, the following polynomial equation is obtained
where \(x = \omega^{2}\). Solving this equation (see Appendix A.3.2), the inflexion points of the graph are
Figure 11d is the loss compliance versus frequency. The curve has two maximums, one minimum and three inflexion points. Deriving the Eqs. (22) and (51) (see Eq. (A.8), Appendix A in First order derivatives), and setting equal to zero, the resulting polynomial equation is as follows
where \(x = \omega^{2}\). This allows finding the maximums and minimum. The resulting values are
With a second derivation of C (Eq. (A.13), Appendix A.2.2.2), one obtains
where \(x = \omega^{2}\). The inflexion points are
The typical curve of the tangent of the phase angle versus frequency has also two maximums, one minimum and three inflexion points (Fig. 12). The first derivative of Eqs. (23) and (52) leads to the polynomic equation (where \(x = \omega^{2}\))
The maximums and minimum are
The second derivative of Eqs. (23) and (52) gives the following equation
The inflexion points are
4 Relationships between GKV and GM models and relaxation and creep coefficients
The equivalence of GKV and GM models of the same order is well known. Nevertheless, unfortunately, it is not easy to find the algebraic expressions of this equivalence. In this section, these expressions are determined and presented in a closed form, up to second order models. Moreover, the relaxation coefficients for the moduli equations and the creep coefficients for the compliance equations are also found. Furthermore, explicit formulas are presented for the parameters of the material models (GKV and GM) from relaxation or creep coefficients. These relationships, up to second order models, can be found in Appendices B.1 and B.2.
In the diagram of Fig. 13, an application of the formulas developed in this work is shown, by way of example. In this case, starting from a dynamic mechanical analysis (DMA) test, the parameters of the relaxation model can be obtained. This is carried out using the equations and their corresponding expressions in Appendix A. From these relaxation parameters, by means of the interconversion expressions of the table shown in Appendix B, the parameters corresponding to the creep test can be obtained. In addition, with the same table, the parameters of the material models are obtained, whether they are of the GM or GKV model.

Flowchart of an application: obtaining the creep and relaxation parameters, as well as the GM and GKV material models, from a dynamic thermomechanical analysis (DMA) test
5 Conclusions
The GKV and GM models of the same order are related to each other. These relationships can be helpful for the engineering practitioner because computational simulators are implemented with just some specific combinations of springs and dashpots. The explicit relationships between the GKV and GM models, up to order two, are found. Moreover, explicit formulas are found for the position of the characteristic points (maxima, minima and inflexion points) of the storage and loss compliances/moduli.
The interconversion formulas for models of first and second order have also been developed. The complete set of interconversion formulas between GKV, GM, relaxation coefficients and creep coefficients have been presented. Therefore, the engineering practitioner can easily have a simple guide to change from one model to another if necessary.
References
Tschoegl, N.W.: Time dependence in material properties: an overview. Mech. Time Depend. Mater. 1, 3–31 (1997)
Casula, G., Carcione, J.: Generalized mechanical model analogies of linear viscoelastic behaviour. Bolletino di Geofis. Teor. ed Appl. 34, 235–256 (1992)
Menard, K.P., Peter, K.: Dynamic Mechanical Analysis: a Practical Introduction. CRC Press, Washington DC (1999)
Gutierrez-Lemini, D.: Engineering Viscoelasticity. Springer, New York (2014)
Drozdov, A.D.: Finite Elasticity and Viscoelasticity. World Scientific Publishing, Hong Kong (1996)
Chawla, A., Mukherjee, S., Karthikeyan, B.: Characterization of human passive muscles for impact loads using genetic algorithm and inverse finite element methods. Biomech. Model. Mechanobiol. 8, 67–76 (2009)
Fatemifar, F., Salehi, M., Adibipoor, R., et al.: Three-phase modeling of viscoelastic nanofiber-reinforced matrix. J. Mech. Sci. Technol. 28, 1039–1044 (2014)
Matter, Y.S., Darabseh, T.T., Mourad, A.H.I.: Flutter analysis of a viscoelastic tapered wing under bending–torsion loading. Meccanica 53, 3673–3691 (2018)
Forte, A.E., Gentleman, S.M., Dini, D.: On the characterization of the heterogeneous mechanical response of human brain tissue. Biomech. Model. Mechanobiol. 16, 907–920 (2017)
Ding, H.: Steady-state responses of a belt-drive dynamical system under dual excitations. Acta Mech. Sin. 32, 156–169 (2016)
Manda, K., Xie, S., Wallace, R.J., et al.: Linear viscoelasticity—bone volume fraction relationships of bovine trabecular bone. Biomech. Model. Mechanobiol. 15, 1631–1640 (2016)
Nantasetphong, W., Jia, Z., Amirkhizi, A., et al.: Dynamic properties of polyurea-milled glass composites. Part I: experimental characterization. Mech. Mater. 98, 142–153 (2016)
Liu, H., Yang, J., Liu, H.: Effect of a viscoelastic target on the impact response of a flat-nosed projectile. Acta Mech. Sin. 34, 162–174 (2018)
Li, Y., Hong, Y., Xu, G.K., et al.: Non-contact tensile viscoelastic characterization of microscale biological materials. Acta Mech. Sin. 34, 589–599 (2018)
Bai, T., Tsvankin, I.: Time-domain finite-difference modeling for attenuative anisotropic media. Geophysics 81, C69–C77 (2016)
Zhang, Y., Lian, Z., Zhou, M., et al.: Viscoelastic behavior of a casing material and its utilization in premium connections in high-temperature gas wells. Adv. Mech. Eng. 10, 168781401881745 (2018)
Baumgaertel, M., Winter, H.H.: Determination of discrete relaxation and retardation time spectra from dynamic mechanical data. Rheol. Acta 28, 511–519 (1989)
Nikonov, A., Davies, A.R., Emri, I.: The determination of creep and relaxation functions from a single experiment. J. Rheol. 49, 1193–1211 (2005)
Sorvari, J., Malinen, M.: On the direct estimation of creep and relaxation functions. Mech. Time Depend. Mater. 11, 143–157 (2007)
Renaud, F., Dion, J.: A new identification method of viscoelastic behavior: application to the generalized Maxwell model. Mech. Syst. Signal Process. 25, 991–1010 (2011)
Bang, K., Jeong, H.Y.: Combining stress relaxation and rheometer test results in modeling a polyurethane stopper. J. Mech. Sci. Technol. 26, 1849–1855 (2012)
Soo Cho, K.: Power series approximations of dynamic moduli and relaxation spectrum. J. Rheol. 57, 679–697 (2013)
Chen, D.L., Chiu, T.C., Chen, T.C., et al.: Using DMA to simultaneously acquire Young’s relaxation modulus and time-dependent Poisson’s ratio of a viscoelastic material. Procedia Eng. 79, 153–159 (2014)
Pacheco, J.E.L., Bavastri, C.A., Pereira, J.T.: Viscoelastic relaxation modulus characterization using Prony series. Lat. Am. J. Solids Struct. 12, 420–445 (2015)
Kim, M., Bae, J.E., Kang, N., et al.: Extraction of viscoelastic functions from creep data with ringing. J. Rheol. 59, 237–252 (2015)
Jung, J.W., Hong, J.W., Lee, H.K., et al.: Estimation of viscoelastic parameters in Prony series from shear wave propagation. J. Appl. Phys. 119, 234701 (2016)
Bonfitto, A., Tonoli, A., Amati, N.: Viscoelastic dampers for rotors: modeling and validation at component and system level. Appl. Sci. 7, 1181 (2017)
Rubio-Hernández, F.J.: Rheological behavior of fresh cement pastes. Fluids 3, 106 (2018)
Poul, M.K., Zerva, A.: Time-domain PML formulation for modeling viscoelastic waves with Rayleigh-type damping in an unbounded domain: theory and application in ABAQUS. Finite Elem. Anal. Des. 152, 1–16 (2018)
Gross, B.: On creep and relaxation. J. Appl. Phys. 18, 212–221 (1947)
Gross, B.: Mathematical Structure of the Theories of Viscoelasticity. Hermann & Co., Paris (1953)
Loy, R.J., Anderssen, R.S.: Interconversion relationships for completely monotone functions. SIAM J. Math. Anal. 46, 2008–2032 (2014)
Park, S.W., Schapery, R.A.: Methods of interconversion between linear viscoelastic material functions. Part I: a numerical method based on Prony series. Int. J. Solids Struct. 36, 1653–1675 (1999)
Schapery, R.A., Park, S.W.: Methods of interconversion between linear viscoelastic material functions. Part II: an approximate analytical method. Int. J. Solids Struct. 36, 1677–1699 (1999)
Sorvari, J., Malinen, M.: Numerical interconversion between linear viscoelastic material functions with regularization. Int. J. Solids Struct. 44, 1291–1303 (2007)
Luk-Cyr, J., Crochon, T., Li, C., et al.: Interconversion of linearly viscoelastic material functions expressed as Prony series: a closure. Mech. Time Depend. Mater. 17, 53–82 (2013)
Loy, R.J., de Hoog, F.R., Anderssen, R.S.: Interconversion of Prony series for relaxation and creep. J. Rheol. 59, 1261–1270 (2015)
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A
1.1 A.1 Constants of differential equations
1.1.1 A.1.1 Constants of Eq. (27) in the text
with \(\varDelta = \mathop \prod \limits_{i = 0}^{n} E_{{i_{K} }} ,\)
1.1.2 A.1.2 Constants of Eq. (56) in the text
1.2 A.2 Derivatives of Prony series
In this Appendix, the mathematical expressions of the first and second order derivatives of Prony series are shown.
1.2.1 A.2.1 Derivatives as a function of time
A.2.1.1 First order derivatives Mathematical expressions to calculate maximums or minimums in relaxation modulus and creep compliance as a function of time, using Prony series, are shown in Eqs. (A.1) and (A.2), respectively
A.2.1.2 Second order derivatives Mathematical expressions to calculate inflexion points in relaxation modulus and creep compliance as a function of time, using Prony series, are shown in equation Eqs. (A.3) and (A.4), respectively
1.2.2 A.2.2 Derivatives as a function of frequency
A.2.2.1 First order derivatives Mathematical expressions to calculate maximums or minimums in storage modulus, loss modulus, storage compliance, loss compliances and tangents of the phase angle as a function of frequency, using Prony series, are shown in equations Eqs. (A.5)–(A.9), respectively
A.2.2.2 Second order derivatives Mathematical expressions to calculate inflexion points in storage modulus, loss modulus, storage compliance, loss compliances and tangents of the phase angle as a function of frequency, using Prony series, are shown in equations Eqs. (A.10)–(A.14), respectively
1.3 A.3 Roots of polynomial equations
In this Appendix, the resolution of cubic and quartic polynomial equations is presented.
1.3.1 A.3.1 Roots of the cubic equation \(x^{3} + ax^{2} + bx + c = 0\)
with
1.3.2 A.3.2 Roots of the quartic equation \(x^{4} + ax^{3} + bx^{2} + cx + d = 0\)
with
Appendix B
2.1 B.1 Relationships with n = 1
See Table 1.
2.2 B.2 Relationships with n = 2
See Table 2.
With the auxiliary constants: (a) Case “GM parameters known” (1st row in the table) (Eq. (54) in the text)
with
(b) Case “relaxation coefficients known” (2nd row in the table)
with
(c) Case “creep coefficients known” (3rd row in the table)
with
(d) Case “GKV parameters known” (4th row in the table) (Eq. (17) in the text)
with
Rights and permissions
About this article

Cite this article
Serra-Aguila, A., Puigoriol-Forcada, J.M., Reyes, G. et al. Viscoelastic models revisited: characteristics and interconversion formulas for generalized Kelvin–Voigt and Maxwell models. Acta Mech. Sin. 35, 1191–1209 (2019). https://doi.org/10.1007/s10409-019-00895-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10409-019-00895-6