
Abstract
As one of the popular non-classical continuum theories in functionally graded material (FGM) nanostructures, the modified nonlocal theory (MNT) has been applied in various mechanical problems. However, due to the difficult solution process, the original integral formulation of MNT (IMNT) is transformed into a differential formulation of MNT (DMNT), which results in an inevitable approximation error. To clarify the consistency and difference between two formulations, the Lamb wave characteristics in viscoelastic FGM nanoplates are investigated. Two mathematical models are established based on the IMNT and DMNT, and solved by the proposed displacement-based and strain-based Legendre polynomial series approaches (LPSAs), respectively. Comparisons with the available data verify the validates of the presented LPSAs. Numerical examples indicate that the results from the DMNT and IMNT are significantly different at high frequencies. Several important differences are discovered. For example, the escape frequency only appears in the results from DMNT, but not in IMNT. In addition to comparing with classical structures, more attention should be paid to the attenuation characteristics of nonlocal nanostructures.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
During the use of nanodevices, the applied load will inevitably cause structural vibration, which leads to the wave propagation. In order to pursue the essential characteristics of structural vibration, the investigation of wave propagation is of great significance. However, when the structural unit is reduced to the nanoscale, the change of its mechanical properties will be very significant, which is called the scale effect [1]. Compared with the classical ones, the nanostructures have some unique mechanics and sensing properties. Thus, the accurate solution and prediction of their properties are particularly important for the structural design.
Unfortunately, the experiments on the scale effect of mechanical properties are extremely difficult, making the theoretical analysis on the scale effect becomes particularly important. In order to study the scale effect, several non-classical continuum theories [2,3,4,5,6] are presented to solve the mechanical problem in nanostructures. All these theories introduce the relevant internal scale parameters to update the constitutive equation. As a result, the conventional numerical method can also be directly used in the nanomechanics by improving its calculation scheme, which greatly reduces the difficulty of investigation on nanomechanics.
As one of the most popular non-classical continuum theories in nanostructures, the nonlocal theory has attracted much attention and has been used in all aspects of mechanics [7,8,9,10]. The nonlocal theory mainly introduces a nonlocal parameter in the constitutive relation [11]
where Cijkl are the elastic tensor, λ is the nonlocal parameter, and α(λ, |P-P0|) is the nonlocal factor. According to the nonlocal theory, stress should be related to strain, but is irrelevant to material parameters. However, in FGM structures, stress is related to the elastic constants, and Eq. (1) should be improper [12]. The original integral formulation in the modified nonlocal theory (IMNT) for the FGM structures was developed by Salehipour [12],
Nevertheless, due to the difficulty in integral solution process, the original integral formulation in the nonlocal theory is usually transformed into a differential formulation,
for Eq. (1)
for Eq. (2)
where ∇2 is the Laplacian. Unsatisfactorily, only the flexural wave [13, 14] and longitudinal wave [15] have been considered in the field of wave dynamics based on the differential formulation in the MNT (DMNT), although wave propagation is one of the most important aspects in dynamics and is crucial for the component design in a nano-electromechanical system.
On the other hand, the differential formulation (Eq. 3b) is an approximation of the integral one (Eq. 2) [11]. Some studies have found that the differential and integral formulations of the nonlocal theory are not completely consistent in dealing with mechanical problems [16, 17]. Nevertheless, the available results do not reveal the notable difference on wave propagation by using two formulations, especially on the attenuation and escape frequency. Furthermore, although some meaningful results have been obtained in macro-scale dissipative structures, such as viscoelastic structures [18], the research on wave propagation and attenuation in dissipative nanostructures is far from sufficient.
This article discusses the investigation of Lamb wave propagation in hysteretic viscoelastic FGM nanoplates, especially focusing on the consistency and difference between the DMNT and IMNT. Because the conventional LPSA [19,20,21,22,23] is more suitable for dealing with viscoelastic FGM structures, two different LPSAs have been proposed: the displacement-based and strain-based LPSAs for the IMNT and DMNT, respectively. They are abbreviated as the IMNT-LPSA and DMNT-LPSA. Comparisons of the two results on dispersion and attenuation are illustrated. The conclusions are helpful for studying wave propagation based on the nonlocal theory.
2 Mathematical Model
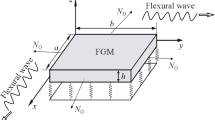
For an orthotropic nanoplate, the wave propagates in the x-direction, and the graded distribution is in the z-direction. h is the thickness. The governing differential equation can be written as,
In view of the MNT and the hysteretic viscoelastic model [18], the constitutive relation and geometric equations are:
In the above equations, \(\sigma_{i\!j}\), \(\varepsilon_{i\!j}\) and ui express the components of stress, strain, and displacement fields, respectively; \(C_{i\!jkl}^{ * }\) and ρ denote the complex elastic tensor and the material density, respectively; t indicates the time; and \(\left[ \cdot \right]_{{{\text{nl}}}}\) is the geometric relationship in nonlocal theory. Clearly, the modified nonlocal theory for a uniform structure is the same as the nonlocal theory [11]. Using the matrix to denote the related elastic coefficients, one has
here, Cpq is real elastic coefficients, and ηpq is the viscosity coefficients.
The stress-free boundary conditions for Lamb waves are
3 Solving Process via the IMNT
For the integral formulation of nonlocal elasticity, the geometric relations are [12]
and [11]
Substituting Eq. (6) into Eq. (5) and considering the boundary conditions (8), one has
The rectangular window function is
The general time-harmonic wave solution is
Then, assuming the material properties have the following expansion
By using the above equations, it is easy to get the following equation
here, \(\cdot \prime\) represents the first derivative. To obtain their solutions, U(z) and W(z) are expanded to the Legendre polynomial series,
where
Pm is the Legendre polynomial of order m, and \(p_{m}^{(i)}\) is the mth expansion coefficients. In practice, the sum should be halted at some value M as the \(p_{m}^{(i)}\) decreases with the increase in m.
Substituting Eq. (16) into Eq. (15), and multiplying by \(Q_{n} \left( z \right)\) with n from 0 to M, then integrating over z from 0 to h, we obtain the following equations as:
here
The dimensions of submatrices \(A_{i\!j}\),\(B_{i\!j}\) and \(D_{i\!j}\) are (M + 1) × (M + 1). The specific expressions of the matrices are shown in Appendix A. By introducing a new wavenumber-dependent vector,
The complex dispersion relation of the Lamb wave can be obtained easily.
4 Solving Process via the DMNT
For the differential formulation of modified nonlocal elasticity, Eq. (6) can be changed to the following form,
Considering the stress-free boundary conditions, and introducing Eq. (7a) into Eq. (6), it is easy to have
Assuming the strain components are
Substituting Eq. (22) into Eq. (21), it yields
By differentiating both sides of Eq. (23) with respect to z, we get
Multiplying both sides of Eq. (24) by ρ, and taking into account Eq. (23), the above equation changes into the following form
Substituting the related U and W in Eqs. (23) and (25) into \(\varepsilon_{{{{xx}}}} ,\)\(\varepsilon_{{{{zz}}}} ,\)\(\varepsilon_{{{{xz}}}}\) in Eq. (20), the governing differential equations in terms of strain components can be obtained \(\rho \omega^{2} \left( {1 + \lambda^{2} k^{2} - \lambda^{2} \frac{{{\text{d}}^{2} }}{{{\text{d}}z^{2} }}} \right)X_{1} = k^{2} C_{11}^{ * } X_{1} + k^{2} C_{13}^{ * } X_{2} - 2{\text{i}}k\left[ {\frac{{{\text{d}}C_{55}^{ * } }}{{{\text{d}}z}}X_{3} \pi \left( z \right) + C_{55}^{ * } \left( {\frac{{{\text{d}}X_{3} }}{{{\text{d}}z}}\pi \left( z \right) + X_{3} \frac{{{\text{d}}\pi \left( z \right)}}{{{\text{d}}z}}} \right)} \right]\)
Referring to the process of Eq. (19), we have
here
The specific expressions of the matrices are shown in Appendix B. Similar to Eq. (18), the complex dispersion relation of the Lamb waves can be achieved.
5 Numerical Examples
In this section, numerical results are discussed for the Lamb wave propagation in viscoelastic FGM nanoplates. The thickness h = 1 nm.
5.1 Validation of the Presented Two LPSAs
In this section, we aim to verify the presented LPSAs. Since there has been no research on viscoelastic FGM nanoplates via the modified nonlocal theory before, the validation will be shown by using the comparisons with the known results for different structures [24,25,26]. Figure 1 depicts the comparison of phase velocity for a quadratic Fe-Al2O3 FGM plate. It is noted that the results obtained using two LPSAs with a small nonlocal parameter λ (λ = 1E-3) should be very close to those from the classical one. Clearly, our results agree with those from the classical quadratic FGM plate [24] in Fig. 1. This indicates that the two LPSAs are suitable for the FGM structures.

Comparison with the open results for a quadratic FGM plate [24], λ = 1E-3
Next, the comparison of attenuation in a carbon-epoxy plate is displayed in Fig. 2. Obviously, the results obtained using two LPSAs are almost identical and coincident with the known results [25]. At last, the comparison of the wave propagation in a homogeneous nonlocal graphene sheet is given in Fig. 3. The results obtained using the DMNT-LPSA are coincident with the open results [26], but inconsistent with those obtained using the IMNT-LPSA. According to Fig. 3, the results obtained using the two LPSAs are close at the low frequencies. However, owing to a large λ (λ = 5/34), consistent results only appear at very low frequencies of the first mode. This example indicates that both LPSAs are valid for the nonlocal nanostructures. The above comparisons demonstrate that both LPSAs are suitable for the viscoelastic FGM nanoplates, but also imply that there are differences between the results obtained using the IMNT and DMNT.

Comparison with the open results on attenuation, a The results obtained using the two LPSAs, λ = 1E-3; b The results for a viscoelastic orthotropic plate [25]

Comparison with the open results for a nonlocal nanoplate [26], λ = 5/34
5.2 Phase Velocity and Attenuation from Different Models
The convergence of the LPSA clearly shows that the sth mode is convergent when N ≥ 2 s [27]. Later, the expanded order N equals 10. Meanwhile, the classical longitudinal velocity of the elastic solid is given as
where C11 and ρ are material parameters for high-performance polyethylene (HPPE), which is shown in Table 1. The related dimensionless frequency Ω = fh/CL.
A linear FGM nanoplate composed of carbon fiber and HPPE is used to analyze the results from the DMNT and IMNT. The material properties are shown in Table 1, and the comparison on the phase velocity is given in Fig. 4. It is found that the nonlocal effect is very weak at low frequencies, leading to consistent results among the three theories. However, the phase velocities decrease significantly due to nonlocal effects at high frequencies, and the difference between the DMNT and IMNT is noticeable. More importantly, the escape frequency, which appears in the results from the DMNT, does not occur in the IMNT. Actually, the escape frequency has been found in the open results from the DMNT [29,30,31]. Due to the existence of escape frequency, the phase velocity obtained from the DMNT must be lower than that from IMNT at high frequencies, as displayed in Fig. 4. The reason for the existence of the escape frequency can be found in Eq. (26). Both sides of Eq. (26) are divided by k2(k → ∞),

Phase velocity of the first four modes from three theories, λ = 0.03, a first and second modes; b third and fourth modes
Considering the uniform plates, one has
Then, the escape frequency \(\omega_{{\text{e}}}^{{}}\) can be obtained. A similar formula was obtained by Chakraborty [31]. It is noted that the escape frequency is produced due to an additional k2-related term in Eq. (26). Nevertheless, the escape frequency formula cannot be obtained from the IMNT due to the lack of another k2-related term. As a result, the escape frequency should originate from the approximate transformation from integral model to differential model. This also implies that the high-frequency waves in the nanostructures can be excited according to the IMNT, but cannot be excited according to the DMNT.
The comparison of the attenuation is given in Fig. 5. The trends of the third and fourth modes are similar to the first and second modes and are not displayed here. Due to the existence of escape frequency, the results from the DMNT disappear at high frequencies. Clearly, the DMNT and IMNT both enhance attenuation at high frequencies. In addition, the difference between the DMNT and IMNT is small at low frequencies, but significant at high frequencies. The attenuation from the DMNT is far greater than that from others at high frequencies. Comparing with the attenuation in classical structures, the investigation denotes that more attention should be paid to the attenuation characteristics in nanostructures.

Comparison of attenuation for the first two modes, λ = 0.03, a first mode; b second mode
5.3 Nonlocal Effect with Different λ
Section 5.2 presents two points that free us from further analysis of the phase velocity at high frequencies and attenuation. (1) The nonlocal effect from the DMNT is more pronounced than that from the IMNT at high frequencies. This can be found from Fig. 4. (2) The attenuation is close at low frequencies for both MNTs, but at high frequencies, the nonlocal effect from the DMNT is more significant than that from the IMNT. This can be found from Fig. 5. Thus, only the nonlocal effect on phase velocity at low frequencies is considered here. The phase velocities of the first and second modes with different λ are displayed in Figs. 6–7. The results indicate that the nonlocal effect from the DMNT is weaker than that from the IMNT at low frequencies.

Phase velocity of the first mode with different λ at low frequencies. a IMNT; b DMNT

Phase velocity of the second mode with different λ at low frequencies. a IMNT; b DMNT
6 Conclusions
The difference and consistency between the IMNT and DMNT are analyzed in this paper. Herein, the most crucial highlights of this work are summarized as below:
-
1.
Two mathematical models for Lamb waves are established on the IMNT and DMNT, and solved using the proposed displacement-based and strain-based Legendre polynomial series approaches (LPSAs), respectively.
-
2.
For phase velocity, the nonlocal effect from the IMNT is evident for all the frequencies, especially for higher-order modes, while the nonlocal effect from the DMNT is clear only at high frequencies. Meanwhile, both MNTs decrease the phase velocity at high frequencies.
-
3.
For attenuation, the results are close at low frequencies for both MNTs. At high frequencies, although both MNTs enhance attenuation evidently, the nonlocal effect from the DMNT is much more significant.
-
4.
The escape frequency, which occurs in the results from the DMNT, does not exist in those from the IMNT. Actually, the approximate transformation from integral model to differential model produces a new wavenumber term, which leads to the escape frequency. This also implies that high-frequency waves in the nanostructures can be excited according to the IMNT.
Finally, as an approximate of the original IMNT, the DMNT is reasonable at low frequencies but unreliable at high frequencies. Meanwhile, the comparison with attenuation in classical structures implies that attenuation characteristics in nanostructures should receive more attention.
Availability of Data and Material
The authors confirm that the data supporting the findings of this study are available within the article.
References
Lim CW, Zhang G, Reddy GN. A higher-order nonlocal elasticity and strain gradient theory and its applications in wave propagation. J Mech Phys Solids. 2015;78:298–313.
Sheikhlou M, Sadeghi F, Najafi S, et al. Surface and nonlocal effects on the thermoelastic damping in axisymmetric vibration of circular graphene nanoresonators. Acta Mech Solid Sin. 2022;35:527–40.
Abouelregal AE. Size-dependent thermoelastic initially stressed micro-beam due to a varying temperature in the light of the modified couple stress theory. Appl Math Mech-Engl Ed. 2020;41(12):1805–20.
Alihemmati J, Tadi BY. Generalized thermoelasticity of microstructures: Lord-Shulman theory with modified strain gradient theory. Mech Mater. 2022;172:104412.
Wang LH, Wang LY, Han HJ, et al. Surface effects on nano-contact based on surface energy density. Arch Appl Mech. 2021;91(10):4179–90.
Hu B, Liu J, Zhang B, et al. Wave propagation in graphene platelet-reinforced piezoelectric sandwich composite nanoplates with nonlocal strain gradient effects. Acta Mech Solid Sin. 2021;34:494–505.
Jiang JN, Wang LF. Analytical solutions for thermal vibration of nanobeams with elastic boundary conditions. Acta Mech Solid Sin. 2017;30:474–83.
Biswas S. Rayleigh waves in a nonlocal thermoelastic layer lying over a nonlocal thermoelastic half-space. Acta Mech. 2020;231(10):4129–44.
Yan ZZ, Wei CQ, Zhang CZ. Band structures of elastic SH waves in nanoscale multi-layered functionally graded phononic crystals with/without nonlocal interface imperfections by using a local RBF collocation method. Acta Mech Solid Sin. 2017;30:390–403.
Kiani K, Roshan M. Nonlocal dynamic response of double-nanotube-systems for delivery of lagged-inertial-nanoparticles. Int J Mech Sci. 2019;152:576–95.
Eringen CA. On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J Appl Phys. 1983;54(9):4703–10.
Salehipour H, Shahidi AR, Nahvi H. Modified nonlocal elasticity theory for functionally graded materials. Int J Eng Sci. 2015;90:44–57.
Li L, Hu Y, Ling L. Flexural wave propagation in small-scaled functionally graded beams via a nonlocal strain gradient theory. Compos Struct. 2015;133:1079–92.
Karami B, Shahsavari D, Li L. Temperature-dependent flexural wave propagation in nanoplate-type porous heterogenous material subjected to in-plane magnetic field. J Therm Stress. 2017;41(4–6):483–99.
Ebrahimi F, Barati MR, Dabbagh A. A nonlocal strain gradient theory for wave propagation analysis in temperature-dependent inhomogeneous nanoplates. Int J Eng Sci. 2016;107:169–82.
Norouzzadeh A, Ansari R, Rouhi H. An analytical study on wave propagation in functionally graded nano-beams/tubes based on the integral formulation of nonlocal elasticity. Waves Random Complex Media. 2020;30(3):562–80.
Kaplunov J, Prikazchikov DA, Prikazchikova L. On integral and differential formulations in nonlocal elasticity. Analysis of PDEs. (2022); 104497.
Zhu F, Wang B, Qian ZH, et al. Accurate characterization of 3D dispersion curves and mode shapes of waves propagating in generally anisotropic viscoelastic/elastic plates. Int J Solid Struct. 2018;150:52–65.
Yu JG, Wang XH, Zhang XM, et al. An analytical integration Legendre polynomial series approach for Lamb waves in fractional order thermoelastic multilayered plates. Math Methods Appl Sci. 2022;45(12):7631–51.
Othmani C, Zhang H, Lü CF, et al. Orthogonal polynomial methods for modeling elastodynamic wave propagation in elastic, piezoelectric and magneto-electro-elastic composites-a review. Compos Struct. 2022;286:115245.
Zheng MF, He CF, Lyu Y, et al. State-vector formalism and the Legendre polynomial solution for modelling guided waves in anisotropic plates. J Sound Vib. 2018;412:372–88.
Lefebvre JE, Yu JG, Ratolojanahary FE, et al. Mapped orthogonal functions method applied to acoustic waves-based devices. AIP Adv. 2016;6(6):065307.
Li Z, Yu JG, Zhang XM, et al. Guided wave propagation in functionally graded fractional viscoelastic plates: a quadrature-free Legendre polynomial method. Mech Adv Mater Struct. 2022;29(16):2284–97.
Hong K, Yuan L, Shen ZH, et al. Analysis of Lamb waves propagation in functional gradient materials using Taylor expansion method. Acta Phys Sin. 2011;60(10):426–32.
Hernando Quintanilla F, Fan Z, Lowe MJS, et al. Guided waves’ dispersion curves in anisotropic viscoelastic single- and multi-layered media. Proc Royal Soc A. 2015;471:20150268.
Liu H, Yang TL. Elastic wave propagation in a single-layered graphene sheet on two-parameter elastic foundation via nonlocal elasticity. Phys E. 2012;44:1236–40.
Wang XH, Li FL, Zhang B, et al. Wave propagation in thermoelastic inhomogeneous hollow cylinders by analytical integration orthogonal polynomial approach. Appl Math Model. 2021;99(7):57–80.
Bartoli I, Marzani A, di Scalea F, et al. Modeling wave propagation in damped waveguides of arbitrary cross-section. J Sound Vib. 2006;295:685–707.
Yan DJ, Chen AL, Wang YS, et al. Propagation of guided elastic waves in nanoscale layered periodic piezoelectric composites. Eur J Mech A Solid. 2017;66:158–67.
Zhang LL, Liu JX, Fang XQ, et al. Effects of surface piezoelectricity and nonlocal scale on wave propagation in piezoelectric nanoplates. Eur J Mech A/solid. 2014;46:22–9.
Chakraborty A. Wave propagation in anisotropic media with non-local elasticity. Int J Solid Struct. 2007;44(17):5723–41.
Acknowledgements
This work was supported by China Postdoctoral Science Foundation (No. 2021M701102), Henan University Science and Technology Innovation Team Support Plan (No. 23IRTSTHN016), and Innovative research team of Henan Polytechnic University (No. T2022-4).
Funding
Project funded by China Postdoctoral Science Foundation, 2021M701102, Xianhui Wang, Henan University Science and Technology Innovation Team Support Plan, 23IRTSTHN016, Jiangong Yu.
Author information
Authors and Affiliations
Contributions
XW contributed to methodology, writing—original draft, funding, and software. YC contributed to investigation, and formal analysis. JY contributed to writing—review, and funding acquisition.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Ethical Approval
Not applicable.
Consent to Participate
Not applicable.
Consent for Publication
The authors agree to publish the paper in this journal with the consent of the employer.
Appendices
Appendix A
Letting t = (2z−h)/h, and defining
where n and m are from 0 to N. The detailed expressions for A, B and D in Eq. (18) are given here.
Appendix B
Refining
where n and m are from 0 to N. The detailed expressions for G, E and F in Eq. (28) are given here.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wang, X., Chen, Y. & Yu, J. Wave Propagation in Viscoelastic Functionally Graded Nanoplates: Comparison of the Integral and Differential Nonlocal Models. Acta Mech. Solida Sin. 36, 724–733 (2023). https://doi.org/10.1007/s10338-023-00398-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10338-023-00398-9