
Abstract
This paper presents the analysis of wave propagation in functionally-graded (FG) nanoplates on a Winkler–Pasternak foundation. The investigation is carried out in the framework of nonlocal elasticity theory and a new four-unknown higher-order displacement theory including indeterminate integral terms. Hamilton’s principle and Navier’s method are used to obtain the frequency relations of FG nanoplates for different conditions by solving an eigenvalue problem. The obtained results for the frequency and phase velocity of wave propagation in an FG nanoplate are compared with recent outcomes of similar research.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1. INTRODUCTION
Composite and functionally-graded materials are special composites whose properties vary continuously along with their thickness. They are used in many various applications, such as reactor vessels, airplanes, space vehicles, biomedical industries, defense industries, and other engineering applications [1, 2]. Currently, different aspects of nanocomposite behavior are being extensively studied. Aghababaei and Reddy [3] analyzed the small-scale effects and the quadratic variation of shear stress across the thickness of a nanoplate to study the free vibration and bending within the third-order shear strain theory. Hedayatrasa et al. [4] proposed a numerical modeling solution using the 2D time-domain spectral finite element method and high-order Chebyshev polynomials as approximation functions for the analysis of wave propagation in FG materials. Abdelmalek et al. [5] analyzed the effect of temperature and humidity on the vibration response of laminated plates utilizing a micromechanical approach and a refined nth-order shear deformation theory. Wang et al. [6] examined the effects of the small scale on bending wave characteristics in nanoplates using nonlocal continuum theory. Guo et al. [7] introduced an element-free kp-Ritz method to approximate the field of displacements for the generalized regularized long wave equation. Also, many published articles are concerned with the analysis of FG nanostructures based on higher-order shear deformation theories and distinct refined theories [8–11].
Belmahi et al. [12] discussed the vibration of carbon nanotube beams embedded in a polymer matrix on polymer Winkler elastic foundations using nonlocal theories of elasticity with arbitrary effects of boundary conditions. Naceri et al. [13] analyzed sound wave propagation in armchair SWCNTs under thermal environment. The literature contains new and modified shear and normal strain theories [14–19]. Much attention is paid to the study of wave propagation and vibration in microplate structures of functionally-graded carbon nanotube reinforced composites [20–23]. Arani et al. [24] discussed the wave frequency behavior in a piezoelectric composite microplate reinforced with FG carbon nanotubes having different material properties across the thickness on a visco-Pasternak foundation based on Eringen’s nonlocal elasticity theory. Sobhy and Zenkour [25, 26] discussed the axial magnetic field and porosity effects on wave propagation in bi-layer FG graphene platelet-reinforced nanobeams and nanoplates. Mehar et al. [27] presented a mathematical method based on a finite element model and the nonlocal theory of elasticity for the response analysis of a nanoplate structure. Abazid et al. [28] considered the wave propagation in FG porous graphene platelet reinforced nanoplates under in-plane mechanical load and Lorentz magnetic force in the context of a new quasi-3D plate theory. Different methods and models based on Eringen’s nonlocal theory are discussed in [12, 29–31]. Other models based on the higher-order nonlocal gradient theory are presented in [32, 33]. There are dissimilar types of strain gradient elasticity in the literature [34–39]. Nonlocal theory can only predict the softening response in contrast to strain gradient theory that describes the stiffening structural behavior of materials [37].
This work presents the analysis of wave propagation in FG nanoplates utilizing a higher-order shear strain theory that provides more precise estimates of transverse shear stresses. In addition, employing a new integral variable displacement field across the thickness of FG nanoplates leads to a decline in the number of unknowns. Navier’s method is used to explain the propagation equations and to assess the frequency and phase velocity of wave propagation in FG nanoplates resting on a Winkler–Pasternak foundation. The influence of the nonlocal parameter, wavenumber, volume fraction index, shear modulus, and spring coefficients on the phase velocity and wave propagation frequency is investigated.
2. MATHEMATICAL MODELS
2.1. Eringen’s Nonlocal Elasticity
Let us consider the Eringen nonlocal elasticity model assuming that the stress state at a reference point is considered to be dependent not only on the strain state at that point but also on the strain states at all body points. The basic relations of nonlocal elasticity theory for an FG nanoplate are given by [6, 8, 13, 16, 40]
where Cijkl is the elastic modulus tensor of classical (local) elasticity, εij and σij are the strain and stress tensors, respectively, and ui is the displacement vector. In addition, α(|x – x′|, τ) is the nonlocal modulus, |x – x′| is the Euclidean distance, and τ = e0a/l, where l is the external characteristic length, e0 is a constant appropriate to the type of material, and a is an internal characteristic length of such a material (e.g., C–C bond length, lattice spacing, or granular distance).
The constitutive equation of nonlocal elasticity theory may be expressed as [6, 8, 13, 16]
where the parameter ξ = e0a is defined above, and \({\nabla ^2}\) is the Laplace operator.
2.2. Material Properties of an FG Nanoplate
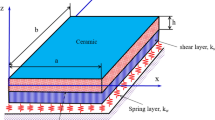
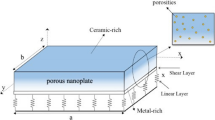
Consider a nanoplate of thickness h, width b, and length a (Fig. 1). The FG nanoplate is embedded in a Winkler–Pasternak foundation and exposed to initial stress as shown in Fig. 1. A wave propagates in the nanoplate along the x and y directions. Suppose that the initial stress along the x direction equals the initial stress along the y direction. It is also assumed that the FG nanoplate is made of a ceramic phase (denoted by c) mixed with a metal phase (denoted by m), with the material composition varying along the z axis, i.e., only across the thickness. Thus, the material properties of the FG nanoplate, such as Young’s modulus E and mass density, can be expressed as [8–11]
where Pm and Pc are the properties of metal and ceramics. The volume fraction of ceramics is defined by
From Eqs. (3) and (4) we can write the Young modulus and mass density of the FG nanoplate:

Wave propagation in the FG nanoplate embedded in a Winkler–Pasternak foundation with initial stress.
2.3. Model with Indeterminate Integral Variables
The present work is developed based on the assumptions of trigonometric shear strain theory, in which the in-plane displacements contain an integral component:
where t is the time, u0, v0, w0, θ are four unknowns of the displacements of the mean surface of the plate, f(z) is the shape function that describes the distribution of transverse shear stresses and strains across the plate thickness. The constants s1 and s2 depend on the plate geometry. In this study, we take the function f(z) as follows:
In linear elasticity, the displacement-strain relation associated with Eq. (6) is expressed in the following form:

where



The integral terms used in the displacement field equations can be determined using Navier’s solution and can be given by
According to the type of solution used (Navier’s solution in our case), the coefficients A′, B′, k1 and k2 are chosen and defined as follows:
The constitutive equations of FG nanoplates in linear elasticity are given by

where
The stress resultants (Ni, Mbi, Msi) and (Ssxz, Ssyz) for the FG nanoplate can be expressed by integrating Eq. (12) over the nanoplate thickness:
Replacing Eq. (12) in Eq. (14) gives the following expressions in which the resulting stresses from the proposed model can be obtained in terms of strains and stiffness elements:

where




The stiffness terms of this approach are defined as
Here we use Hamilton’s principle to get the equations of motion. This principle can be given by the following analytical relation:
where δUP and δUF are the components of change in the strain energy, δK is the kinetic energy change, and δV is the potential energy change:
The change in the strain energy of the Winkler–Pasternak foundation can be expressed as
where KW and Kg are the transverse and shear stiffness coefficients of the foundation, respectively.
The kinetic energy change can be given by
where the upper dot denotes the differentiation with respect to the time variable t, ρ(z) is the mass density, and (I, J) are the mass inertias specified by
The potential energy of the applied load can be stated as
with
By substituting Eqs. (19)–(21), (23) into Eq. (18) and integrating by parts and separately isolating the coefficients u0, v0, w0 and θ, we obtain the wave propagation equations
with
and
We assume that the solutions for u0, v0, w0, and θ describe waves propagating in the xy plane in the form

where U, V, W, X are the wave amplitude coefficients, k1, k2 are respectively the wavenumbers of wave propagation along the x and y axes, and ω is the frequency. So, with the aid of the above solutions, the wave propagation equations appeared in Eqs. (25) become
where
Substituting Eq. (28) into Eq. (15), we obtain

The frequency relations of wave propagation in the FG nanoplate are provided by
Assuming k1 = k2 = k, the roots of Eq. (31) can be given as follows:
They correspond to the wave modes M0, M1, M2 and M3, respectively. The wave modes M0 and M3 correspond to the bending wave, while M1 and M2 correspond to the extension wave. The phase velocity of wave propagation in the FG nanoplate is expressed as
3. NUMERICAL RESULTS AND DISCUSSION
3.1. Comparison of Results
The mathematical formulation of the new model based on a four-unknown higher-order theory including indeterminate integral variables allows the analysis of wave propagation in FG nanoplates. In this work, the wave propagation in FG nanoplates is analyzed using the solution methodology based on a higher-order shear strain theory, which is schematically represented in Fig. 2.

Solution methodology for the problem of wave propagation in FG nanoplates based on a higher-order shear strain theory.
Several numerical examples are studied and discussed to verify the accuracy of the new theory with indeterminate integral variables for the prediction of wave propagation in FG nanoplates. The results obtained by this theory are compared with those of the third-order, first-order and classical nonlocal theories. The dimensionless quantity for the natural frequency is
This analysis is performed for a nanoplate for various values of the aspect ratio and nonlocal parameters. The results are reported in Tables 1 and 2. The outcomes obtained by the current theory are compared with the results of the closed-form solution derived by Aghababaei and Reddy [3]. It can be noticed that nonlocal theories predict natural frequencies smaller than those of local theories, especially for high-mode frequencies (Table 2). Thus, local theories overestimate frequencies. Employing a new integral variable displacement field through the thickness of the FG nanoplate, the summation of the integral terms in the displacement field leads to a reduction in the number of unknowns. Note that the integrals do not have limits. In the present study, only four unknown displacement terms are considered instead of five terms in ordinary first- and third-order shear deformation theories [3]. The field of axial displacements uses the hyperbolic secant shear function in terms of thickness ordered to include the effect of the transverse shear strain across the thickness.
To validate the wave propagation results obtained by the present theory of the indeterminate integral with four variables, comparisons were made with the results of Wang et al. [6]. Let us consider the case of isotropic plates with h = 0.34 nm and the following mechanical characteristics: E = 1.06 TPa, ν = 0.25, ρ = 2.25 g/cm3, KW = 1.13 × 1018 Pa/m, and Kg = 2 N/m.
This comparison is made for various values of the scale coefficient ξ = 0 to 2 nm. The results are shown in Figs. 3–7. It should be indicated that the data obtained by Wang et al. [6] are based on the nonlocal continuum model of classical theory. According to Figs. 3–6, the results of this study are in good agreement with the results reported in [6].

Comparison of the frequency relations for a flexural wave obtained using a classical nonlocal nanoplate model, without initial stress (color online).

Comparison of the frequency relations for a flexural wave obtained using a classical nonlocal nanoplate model, with tensile stress (color online).

Comparison of the frequency relations for a flexural wave obtained using a classical nonlocal nanoplate model for different values of compressive load (color online).

Comparison of the frequency relations for flexural wave propagation in nanoplates on a Winkler foundation obtained using a classical nonlocal nanoplate model (tensile load σ0 = 0.005E) (color online).

Comparison of the frequency relations for flexural wave propagation in nanoplates obtained using a classical nonlocal nanoplate model, with the influence of the shear layer stiffness (tensile load σ0 = 0.005E) (color online).
We analyze a simply supported isotropic nanoplate with the following parameters: a = 10, E = 30 × 106, ν = 0.3, ρ = 1.
3.2. Parametric Study
The mechanical properties of FG nanoplates are believed to correspond to the values listed in Table 3. The values of the nonlocal parameter ξ (nm) are considered to be zero up to 3 nm [6, 17]. The Winkler and Pasternak coefficients are taken from [6]. The final solutions were obtained using the analytical procedure of Navier’s method described above in Sect. 2. To study the influence of the parameters affecting the frequency and phase velocity of wave propagation in FG nanoplates, parametric studies were carried out to observe the effect of the power-law index of the material (N), the nonlocal parameter, and the coefficients of the elastic medium (KW and Kg). The nonlocal elasticity (ξ ≠ 0) and classical (local) elasticity (ξ = 0) models were considered.
The frequency curves of FG and isotropic (N = 0) nanoplates versus the nonlocal parameter ξ are illustrated in Fig. 8 for three values of the material index (N = 0.5, 1, and 2). It is noted that when the scale coefficient increases, the frequency curves for isotropic and FG nanoplates decrease, and this reduction is particularly significant for the FG nanoplates with the material power-law index N = 2. This means that a nanoplate with isotropic properties is more rigid than an FG nanoplate.

Effect of the material index on the frequency of wave propagation in FG nanoplate, with k1 = k2 = 109 m–1, KW = Kg = 0 (color online).
The curves of the frequency and phase velocity of FG nanoplates with N = 2 versus the wavenumbers for different nonlocal parameter values are shown in Figs. 9 and 10. The outcomes of the two figures imply that with the increasing nonlocal parameter the frequency and phase velocity decrease for all wavenumber values. The effect of the nonlocal parameter, i.e., the small-scale effect, reduces the frequency and phase velocity. Moreover, as shown in Fig. 10, the phase velocities are sensitive to the small-scale coefficient for large wavenumbers k > 0.5, while the dependence is insignificant at k < 0.5.

Effect of the nonlocal parameter on the frequency of wave propagation in FG nanoplate, with N = 2, KW = Kg = 0 (color online).

Effect of the nonlocal parameter on the phase velocity of wave propagation in FG nanoplate, with N = 2, KW = Kg = 0 (color online).
The frequency curves of the FG nanoplate versus the material index N for different values of the nonlocal parameter are shown in Fig. 11. As the nonlocal parameter increases, the frequency curves decrease. The same behavior of the frequency curves is observed with the increasing material index N.

Variation of wave propagation frequency with material index for different values of the nonlocal parameter, with k1 = k2 = k = 109 m–1, KW = Kg = 0 (color online).
The dependences of the frequency on the Pasternak and Winkler moduli Kg and KW for different values of the nonlocal parameter are displayed in Figs. 12 and 13, respectively, for the material index N = 2. One can see that when the Pasternak or Winkler coefficients increase, the frequency curves also increase for all nonlocal parameter values. This means that the increase in the Pasternak and Winkler coefficients parallels the increase in the stiffness of the FG nanoplate. Moreover, comparison of the effect of Kg and KW on the frequency curves indicates that the impact of the Pasternak modulus is greater than that of the Winkler modulus.

Variation of frequency with shear modulus parameter (KW = 0) with N = 2, k1 = k2 = k = 109 m–1 (color online).

Variation of frequency with Winkler modulus parameter (Kg = 0) with N = 2, k1 = k2 = k = 109 m–1 (color online).
The frequency and phase velocity curves versus the wavenumber k for three values of the initial stress under tensile load are shown in Figs. 14 and 15, respectively. The curves are plotted for the nonlocal parameter ξ = 0.5 nm and the material index N = 2. It can be noted that as the wavenumber k increases, the frequency and phase velocity curves increase for all values of the initial tensile stress.

Variation of frequency with wavenumber for different values of initial stress under tensile load, with N = 2, ξ = 0.5 nm, KW = Kg = 0 (color online).

Variation of phase velocity with wavenumber for different values of initial stress under tensile load, with N = 2, ξ = 0.5 nm, KW = Kg = 0 (color online).
The frequency curve of FG nanoplates versus the nonlocal parameter for different types of foundation and the material index N = 2 are shown in Fig. 16. Four cases are considered: Winkler medium (KW = 0.5, Kg = 0), Pasternak medium (KW = 0, Kg = 2), Winkler–Pasternak medium (KW = 0.5, Kg = 2), and without an elastic medium (KW = Kg = 0). It can be seen that taking into account the elastic medium increases the nanoplate frequency and thus leads to a more rigid structure. In addition, the impact of the Pasternak medium on the nanoplate frequency curve is greater than that of the Winkler medium. It can be said that the Winkler parameters can describe the normal load of the elastic medium, while the Pasternak parameters describe both the transverse shear and the normal loads of the elastic medium. The effect of the coupled Winkler–Pasternak medium on the frequency curve of the FG nanoplate is greater than that of the Pasternak medium for the nonlocal parameter less than 2.5.

Comparison of the frequency ratios of the FG nanoplate depending on the type of foundation (color online).
4. CONCLUSIONS
This paper considered the wave propagation response of an FG nanoplate embedded in a Winkler–Pasternak medium based on a higher-order Eringen’s nonlocal theory and a new displacement field introducing indeterminate integral variables. The effect of the following parameters on the frequency and phase velocity of FG nanoplates was discussed: nonlocal parameter, material power-law index (N), wavenumbers, and the type of elastic medium. It was assumed that the nanoplate was a mixture of metal (Al) and ceramics (Al2O3), with the properties changing through the nanoplate thickness. Navier’s method and procedure were applied to determine the frequency and phase velocity of FG nanoplates. The formulas for the case of homogeneous isotropic nanoplates can be found as a special case. The results obtained were compared with the literature results. The following remarks can be drawn from this study:
1. The use of indeterminate integral terms allows reducing the number of propagation equations and variables. We can say that this model is simple and efficient for the analysis of the wave characteristics of FG nanoplates.
2. The variation of the material index influences the wave propagation frequency of FG nanoplates. It is shown that the frequency of wave propagation in FG nanoplates is lower than that in isotropic ceramic nanoplates.
3. The small-scale effect increases the frequency and phase velocity of wave propagation in FG nanoplates. The difference between nonlocal and local theories is significant for a high value of the nonlocal parameter.
4. The nonlocal parameter effect plays an important role in the study of the frequency behavior of FG nanoplates for larger wavenumbers. The phase velocities are more sensitive to the small-scale coefficient for large values of wavenumbers and less sensitive for smaller wavenumbers.
5. The wave propagation frequency and phase velocity become low with the increasing initial tensile stress.
6. An increase in the Winkler foundation modulus and the shear layer stiffness increase the wave propagation frequency and phase velocity.
7. Taking into account the type of elastic medium increases the propagation frequency of the waves in FG nanoplates.
REFERENCES
Yamanouchi, M. and Koizumi, M., Functionally Gradient Materials, in Proc. I Int. Symp. on Functionally Graded Materials, Sendai, Japan, 1991.
Bouazza, M., Antar, K., Amara, K., Benyoucef, S., and Adda Bedia, E.A., Influence of Temperature on the Beams Behavior Strengthened by Bonded Composite Plates, Geomech. Eng., 2019, vol. 8, no. 5, pp. 555–566. https://doi.org/10.12989/GAE.2019.18.5.555
Aghababaei, R. and Reddy, J.N., Nonlocal Third-Order Shear Deformation Plate Theory with Application to Bending and Vibration of Plates, J. Sound Vib., 2009, vol. 326, pp. 277–289. https://doi.org/10.1016/j.jsv.2009.04.044
Hedayatrasa, S., Bui, T.Q., Zhang, C., and Wah Lim, C., Numerical Modeling of Wave Propagation in Functionally Graded Materials Using Time-Domain Spectral Chebyshev Elements, J. Comput. Phys., 2014, vol. 258, pp. 381–404. https://doi.org/10.1016/j.jcp.2013.10.037
Abdelmalek, A., Bouazza, M., Zidour, M., and Benseddiq, N., Hygrothermal Effects on the Free Vibration Behavior of Composite Plate Using nth-Order Shear Deformation Theory: A Micromechanical Approach, Iran. J. Sci. Tech. Trans. Mech. Eng., 2019, vol. 43, no. 1, pp. 61–73. https://doi.org/10.1007/s40997-017-0140-y
Wang, Y.Z., Li, FM., and Kishimoto, K., Scale Effects on Flexural Wave Propagation in Nanoplate Embedded in Elastic Matrix with Initial Stress, Appl. Phys. A, 2010, vol. 99, pp. 907–911. https://doi.org/10.1007/s00339-010-5666-4
Guo, P.F., Zhang, L.W., and Liew, K.M., Numerical Analysis of Generalized Regularized Long Wave Equation Using the Element-Free Kp-Ritz Method, Appl. Math. Comput., 2014, vol. 240, pp. 91–101. https://doi.org/10.1016/j.amc.2014.04.023
Karami, B., Janghorban, M., and Tounsi, A., Wave Propagation of Functionally Graded Anisotropic Nanoplates Resting on Winkler–Pasternak Foundation, Struct. Eng. Mech., 2019, vol. 70, no. 1, pp. 55–66. https://doi.org/10.12989/sem.2019.70.1.055
Ebrahimi, F. and Seyfi, A., Studying Propagation of Wave of Metal Foam Rectangular Plates with Graded Porosities Resting on Kerr Substrate in Thermal Environment Via Analytical Method, Waves Random Complex Media, 2022, vol. 32, no. 2, pp. 832–855. https://doi.org/10.1080/17455030.2020.1802531
Tahir, S.I., Chikh, A., Tounsi, A., Al-Osta, M.A., Al-Dulaijan, S.U., and Al-Zahrani, M.M., Wave Propagation Analysis of a Ceramic-Metal Functionally Graded Sandwich Plate with Different Porosity Distributions in a Hygro-Thermal Environment, Compos. Struct., 2021, vol. 269, p. 114030. https://doi.org/10.1016/j.compstruct.2021.114030
Zaitoun, M.W., Chikh, A., Tounsi, A., Sharif, A., Al-Osta, M.A., Al-Dulaijan, S.U., and Al-Zahrani, M.M., An Efficient Computational Model for Vibration Behavior of a Functionally Graded Sandwich Plate in a Hygrothermal Environment with Viscoelastic Foundation Effects, Eng. Comput., 2021. https://doi.org/10.1007/s00366-021-01498-1
Belmahi, S., Zidour, M., Meradjah, M., Bensattalah, T., and Dihaj, A., Analysis of Boundary Conditions Effects on Vibration of Nanobeam in a Polymeric Matrix, Struct. Eng. Mech., 2018, vol. 67, no. 5, pp. 517–525. https://doi.org/10.12989/sem.2018.67.5.517
Naceri, M., Zidour, M., Semmah, A., Houari, M.S.A, Benzair, A., and Tounsi, A., Sound Wave Propagation in Armchair Single Walled Carbon Nanotubes under Thermal Environment, J. Appl. Phys., 2011, vol. 110, p. 124322. https://doi.org/10.1063/1.3671636
Becheri, T., Amara, K., Bouazza, M., and Benseddiq, N., Buckling of Symmetrically Laminated Plates Using nth-Order Shear Deformation Theory with Curvature Effects, Steel Compos. Struct., 2016, vol. 21, no. 6, pp. 1347–1368. https://doi.org/10.12989/SCS.2016.21.6.1347
Bouazza, M. and Zenkour, A.M., Free Vibration Characteristics of Multilayered Composite Plates in a Hygrothermal Environment Via the Refined Hyperbolic Theory, Eur. Phys. J. Plus., 2018, vol. 133, p. 217. https://doi.org/10.1140/epjp/i2018-12050-x
Bouazza, M., Becheri, T., Boucheta, A., and Benseddiq, N., Thermal Buckling Analysis of Nanoplates Based on Nonlocal Elasticity Theory with Four-Unknown Shear Deformation Theory Resting on Winkler–Pasternak Elastic Foundation, Int. J. Comput. Meth. Eng. Sci. Mech., 2016, vol. 17, no. 5–6, pp. 362–373. https://doi.org/10.1080/15502287.2016.1231239
Frikha, A., Zghal, S., and Dammak, F., Dynamic Analysis of Functionally Graded Carbon Nanotubes-Reinforced Plate and Shell Structures Using a Double Directors Finite Shell Element, Aerospace Sci. Tech., 2018, vol. 78, pp. 438–451. https://doi.org/10.1016/j.ast.2018.04.048
Bouazza, M. and Zenkour, A.M., Hygrothermal Environmental Effect on Free Vibration of Laminated Plates Using nth-Order Shear Deformation Theory, Waves Random Complex Media, 2021. https://doi.org/10.1080/17455030.2021.1909173
Ezzin, H., Mkaoir, M., Arefi, M., Qian, Z., and Das, R., Analysis of Guided Wave Propagation in Functionally Graded Magneto-Electro Elastic Composite, Waves Random Complex Media, 2021. https://doi.org/10.1080/17455030.2021.1968541
Bouazza, M., Kenouza, Y., Benseddiq, N., and Zenkour, A.M., A Two-Variable Simplified nth-Higher-Order Theory for Free Vibration Behavior of Laminated Plates, Compos. Struct., 2017, vol. 182, pp. 533–541. https://doi.org/10.1016/j.compstruct.2017.09.041
Bouazza, M. and Zenkour, A.M., Vibration of Carbon Nanotube-Reinforced Plates Via Refined nth-Higher-Order Theory, Arch. Appl. Mech., 2020, vol. 90, pp. 1755–1769. https://doi.org/10.1007/s00419-020-01694-3
Phuong, N.T., Nam, V.H., Trung, N.T., Duc, V.M., Loi, N.V., Thinh, N.D., and Tu, P.T., Thermomechanical Postbuckling of Functionally Graded Graphene-Reinforced Composite Laminated Toroidal Shell Segments Surrounded by Pasternak’s Elastic Foundation, J. Thermoplast. Compos. Mater., 2021, vol. 34, no. 10, pp. 1380–1407. https://doi.org/10.1177/0892705719870593
Bouazza, M., Becheri, T., Boucheta, A., and Benseddiq, N., Bending Behavior of Laminated Composite Plates Using the Refined Four-Variable Theory and the Finite Element Method, Earthq. Struct., vol. 17, no. 3, pp. 257–270. https://doi.org/10.12989/EAS.2019.17.3.257
Arani, A.G., Jamali, M., Mosayyebi, M., and Kolahchi, R., Analytical Modeling of Wave Propagation in Viscoelastic Functionally Graded Carbon Nanotubes Reinforced Piezoelectric Microplate under Electro-Magnetic Field, Proc. Inst. Mech. Eng. N. J. Nanomater. Nanoeng. Nanosyst., 2015, pp. 17–33. https://doi.org/10.1177/1740349915614046
Zenkour, A.M. and Sobhy, M., Axial Magnetic Field Effect on Wave Propagation in Bi-Layer FG Graphene Platelet-Reinforced Nanobeams, Eng. Comput., 2021. https://doi.org/10.1007/s00366-020-01224-3
Sobhy, M. and Zenkour, A.M., Wave Propagation in Magneto-Porosity FG Bi-Layer Nanoplates Based on a Novel Quasi-3D Refined Plate Theory, Waves Random Complex Media, 2021, vol. 31, no. 5, pp. 921–941. https://doi.org/10.1080/17455030.2019.1634853
Mehar, K., Mahapatra, T.R., Panda, S.K., Katariya, P.V., and Tompe, U.K., Finite-Element Solution to Nonlocal Elasticity and Scale Effect on Frequency Behavior of Shear Deformable Nanoplate Structure, J. Eng. Mech., 2018, vol. 144, no. 9, p. 04018094. https://doi.org/10.1061/(ASCE)EM.1943-7889.0001519
Abazid, M.A., Zenkour, A.M., and Sobhy, M., Wave Propagation in FG Porous GPLs-Reinforced Nanoplates under In-Plane Mechanical Load and Lorentz Magnetic Force Via a New Quasi 3D Plate Theory, Mech. Based Design Struct. Mach., 2021, vol. 53, no. 1, pp. 11–22. https://doi.org/10.1080/15397734.2020.1769651
Shariati, M., Shishesaz, M., Mosalmani, R., and Roknizadeh, S., Size Effect on the Axisymmetric Vibrational Response of Functionally Graded Circular Nano-Plate Based on the Nonlocal Stress-Driven Method, J. Appl. Comput. Mech., 2022, vol. 8, no. 3, pp. 962–980. https://doi.org/10.22055/JACM.2021.38131.3159
Ahmad Pour, M., Golmakani, M., and Malikan, M., Thermal Buckling Analysis of Circular Bilayer Graphene Sheets Resting on an Elastic Matrix Based on Nonlocal Continuum Mechanics, J. Appl. Comput. Mech., 2021, vol. 7, no. 4, pp. 1862–1877. https://doi.org/10.22055/JACM.2019.31299.1859
Kumar, Y., Gupta, A., and Tounsi, A., Size-Dependent Vibration Response of Porous Graded Nanostructure with FEM and Nonlocal Continuum Model, Adv. Nano Res., 2021, vol. 11, no. 1, pp. 1–17. https://doi.org/10.12989/ANR.2021.11.1.001
Farajzadeh Ahari, M., and Ghadiri, M., Resonator Vibration of a Magneto-Electro-Elastic Nano-Plate Integrated with FGM Layer Subjected to the Nano Mass-Spring-Damper System and a Moving Load, Waves Random Complex Media, 2022. https://doi.org/10.1080/17455030.2022.2053233
Bouazza, M., Zenkour, A.M., and Benseddiq, N., Closed-from Solutions for Thermal Buckling Analyses of Advanced Nanoplates According to a Hyperbolic Four-Variable Refined Theory with Small-Scale Effects, Acta Mech., 2018, vol. 229, pp. 2251–2265. https://doi.org/10.1007/s00707-017-2097-8
Saini, R., Ahlawat, N., Rai, P., and Khadimallah, M.A., Thermal Stability Analysis of Functionally Graded Non-Uniform Asymmetric Circular and Annular Nano Discs: Size-Dependent Regularity and Boundary Conditions, Eur. J. Mech. A. Solids, 2022, vol. 94, p. 104607. https://doi.org/10.1016/j.euromechsol.2022.104607
Bouazza, M., Amara, K., Zidour, M., Abedlouahed, T., and El Abbas, A.B., Thermal Effect on Buckling of Multiwalled Carbon Nanotubes Using Different Gradient Elasticity Theories, Nanosci. Nanotech., 2014, vol. 4, no. 2, pp. 27–33. https://doi.org/10.1016/j.egypro.2014.06.078
Faghidian, S.A., Higher Order Mixture Nonlocal Gradient Theory of Wave Propagation, Math. Meth. Appl. Sci., 2020. https://doi.org/10.1002/mma.6885
Barretta, R., Faghidian, S.A., and Marotti de Sciarra, F., Aifantis Versus Lam Strain Gradient Models of Bishop Elastic Rods, Acta Mech., 2019, vol. 230, pp. 2799–2812. https://doi.org/10.1007/s00707-019-02431-w
Reza Barati, M., Nadhim, M.F., and Zenkour, A.M., Dynamic Response of Nanobeams Subjected to Moving Nanoparticles and Hygro-Thermal Environments Based on Nonlocal Strain Gradient Theory, Mech. Adv. Mater. Struct., 2019, vol. 26, no. 19, pp. 1661–1669. https://doi.org/10.1080/15376494.2018.1444234
Zhang, C., Eyvazian, A., Alkhedher, M., Alwetaishi, M., and Ameer Ahammad, N., Modified Couple Stress Theory Application to Analyze Mechanical Buckling Behavior of Three-Layer Rectangular Microplates with Honeycomb Core and Piezoelectric Face Sheets, Compos. Struct., 2022, vol. 292, p. 115582. https://doi.org/10.1016/j.compstruct.2022.115582
Akavci, S.S. and Tanrikulu, A.H., Buckling and Free Vibration Analyses of Laminated Composite Plates by Using Two New Hyperbolic Shear Deformation Theories, Mech. Compos. Mater., 2008, vol. 44, no. 2, pp. 217–230. https://doi.org/10.1007/s11029-008-9004-2
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Fizicheskaya Mezomekhanika, 2023, Vol. 26, No. 1, pp. 47–59.
Rights and permissions
About this article

Cite this article
Ellali, M., Bouazza, M. & Zenkour, A.M. Wave Propagation in Functionally-Graded Nanoplates Embedded in a Winkler–Pasternak Foundation with Initial Stress Effect. Phys Mesomech 26, 282–294 (2023). https://doi.org/10.1134/S1029959923030049
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1029959923030049