
Abstract
Multipath is one of the major error sources in high-precision GNSS positioning since it cannot be mitigated by double differences or corrected by empirical models. Considering that the multipath error is related to the carrier-to-noise ratio (CNR) of the signal strength, an enhanced multipath extraction and mitigation method based on an adaptive layer wavelet packets, bootstrapped searches strategy and CNR constraints is proposed. The key concept of the proposed method is to use the adaptive layer-selecting wavelet packets transform to improve the precision of the multipath correction model, which is extracted from the reference day. In addition, to improve the accuracy and effectiveness of multipath mitigation on the subsequent observation day, a bootstrap search strategy based on CNR constraints is adopted. Real data sets are collected to assess the performance of the denoising and the static relative positioning of the proposed method; experimental results show that: (1) the multipath residuals of the carrier phase maintain a strong relationship with the CNR. Thus, the proposed method based on CNR constraints is feasible. Moreover, based on analysis of the distribution of multipath residuals, it can be found that constant layer wavelet packets transform denoising can not only lead to inefficiency for most epochs with low residuals but can also reduce the effectiveness of denoising for epochs with large residuals. (2) The average improvement rate of the root mean square (RMS) of the single-difference residuals after adopting the proposed method can reach approximately 25.33% compared with the original residuals and approximately 10.37% compared with the constant layering method, which indicates that the proposed method can improve the accuracy of the multipath correction model effectively; (3) For the positioning results, after applying the proposed method, the RMS of bias can improve 30.77, 31.25 and 38.20% in the east, north and up components compared with the original result. Even compared with the constant layering multipath mitigation method, the improvement rate can also reach approximately 29.79% for 3D positioning. It is worth noting that this proposed method is also suitable for other GNSS static relative positioning applications such as BDS and Galileo.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Carrier phase multipath interference is one of the key factors that restrict the accuracy of GNSS positioning since it cannot be eliminated by differencing or corrected by an empirical model. Generally, multipath interference can be mitigated by three processing strategies: (1) antenna strategy, which mainly relies on high-quality antenna technology to suppress the multipath interference; (2) receiver strategy, which mainly relies on receiver hardware technology to address multipath interference; (3) data processing strategy, which mainly relies on an algorithm model to mitigate the multipath interference from the observation domain or coordinate domain.
Based on the antenna and receiver strategies, many methods have been used to mitigate multipath in the GNSS field, such as the dual linear polarized antenna (Zhang et al. 2017a, b) and vector delay lock loop (Hsu et al. 2015). However, the antenna strategy can only suppress the pseudorange multipath. It is invalid for carrier phase multipath. In terms of the receiver technique, although it can eliminate the medium and long delays of carrier phase multipath, the short delay multipath error cannot be suppressed effectively. In addition, both antenna and receiver techniques, which require hardware costs, are difficult to implement in lower-cost receivers. Considering these reasons, the research on carrier phase multipath mitigation has mainly focused on the data processing strategy.
The methods based on post-data processing strategy can be divided into two parts: multipath model extraction and multipath mitigation. For a multipath extraction model, Ge et al. (2000) proposed using an adaptive filter for multipath extraction. However, the performance of the adaptive filter is largely dependent on the length of the filter and the step size of the parameter. Considering that wavelet technology has excellent denoising performance, Zhong et al. (2010) used the wavelet transform for carrier multipath mitigation. Since the thresholding of the wavelet transform affects the performance of denoising directly, Azarbad and Mosavi (2014) developed soft thresholding for the stationary wavelet transform to remove noise for multipath extraction. Lau (2015) analyzed the hard thresholding for wavelet packets to extract multipath. However, soft thresholding will lead to constant deviations between the estimates, and the hard thresholding method will give rise to an oscillation of the reconstructed signal. Considering the above reasons, Su et al. (2018) applied the adaptive thresholding wavelet denoising in multipath model extraction. Although the thresholding strategy has been studied, the layer of wavelet transform has not been researched in depth, especially in the application of wavelet packets decomposition. Liu (2020) proposed that the number of decomposition layers greatly impacts the denoising effect. If the decomposition layer is set too high, the signal information will be lost since the thresholding processing is carried out on the coefficients for each sublayer. In contrary, too few decomposition layers will lead to undesirable denoising.
Multipath mitigation can be divided into a time domain strategy and a spatial domain strategy. The time domain strategy is mainly used to correct multipath by the sidereal filtering method. Therefore, the key to the time domain strategy is to calculate the accurate shift time of the satellite orbital repeat period. Zhong et al. (2010) developed a new method based on sidereal filtering by calculating the repeat period for each satellite independently to improve the accuracy of multipath correction. Shen et al. (2020) proposed a variation sidereal filtering method based on window matching for low-frequency multipath. In addition, Wang et al. (2018) compared three methods for estimating the repeat time, and the experimental results indicated that the three methods are basically identical in multipath mitigation. The differences between the three methods are very small and can be ignored. However, the sidereal filtering method largely depends on the precision of the orbital repeat, which will lead to deterioration, especially for data with a low sampling rate.
To take advantage of the relationship between the satellite elevation and the multipath error, a spatial domain strategy is proposed to mitigate the multipath. The key of the spatial domain strategy is establishing the multipath correction model by satellite elevation and azimuth and searching the model by an efficient search algorithm. Wanninger and May (2001) first established a 5°×1° (azimuth and elevation) multipath correction model. In addition, considering that most conventional spatial models have a fixed azimuthal resolution, Fuhrmann et al. (2015) proposed the use of congruent cells and rigorous statistical strategies for multipath mitigation. For the search strategy, Wang et al. (2017) improved the efficiency of search by using a matching strategy, which can match the closest elevation and azimuth with the multipath correction model. From the above analysis, it can be concluded that the spatial domain strategy is largely dependent on the model resolutions and the search algorithm, and the higher the model resolution is, the higher the search performance of the algorithm required.
In addition, since the multipath error is related to the carrier-to-noise ratio (CNR) or signal-to-noise ratio (SNR) of the signal, Axelrad et al. (1996) proposed using the CNR or SNR to detect multipath first. Using a filter algorithm, Benton and Mitchell (2011) separated the multipath from CNR data using a filter. With the development of triple-frequency signals, the ability of CNR weighting, height aiding and consistency checking to improve GNSS positioning in urban areas are assessed by Grove and Jiang (2013). Moreover, by using the difference in CNR between three frequencies, Strode and Groves (2016) developed a new multipath detection method for dynamic applications. Taking full advantage of the relationship between the multipath and CNR, Zhang (2019) proposed detecting the multipath by a combination test consisting of two statistical tests. Both of the above two methods mainly focus on multipath detection but not multipath mitigation. Su et al. (2020) developed an enhanced multipath detection and mitigation method based on the CNR model for GPS system PPP applications. However, most of them only focus on PPP positioning, and the rationality of using the CNR to improve multipath mitigation for relative positioning has not been researched.
Considering the discussion above, we propose a new multipath mitigation method based on adaptive layer selection and a bootstrap search strategy under the constraint of CNR. Unlike the traditional wavelet packets transform, the improved wavelet packets transform layer is adaptively constrained by CNR. Moreover, the difference in CNR between adjacent epochs is used to improve the efficiency of the model searching for multipath mitigation. In conclusion, in this new method, both the precision and the efficiency of the multipath mitigation are taken into consideration.
Basic model
Before introducing the proposed method, the basic models are presented first, such as multipath and wavelet packets transform theory. The theory of multipath mainly presents the effect of multipath on the positioning performance. Moreover, the relationship between the multipath residuals and the CNR is also analyzed in this section.
Multipath theory
Multipath is induced due to the reflection or diffraction of signals, which is derived from the phase multiple paths. In GNSS, the signal received by the receiver includes the direct signal transmitted by a satellite and consists of the reflection and diffraction signals derived by this signal. Therefore, the multipath signal can usually be expressed as (Rost and Wanninger 2009):
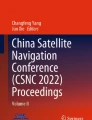
where Sm(t) is the multipath signal received by the GNSS receiver; ai(t) denotes the amplitude of the signal, which includes the direct and indirect signals; w0 represents the nominal frequency of the direct signal; γi is the relative phase of the i-th component; n denotes the total number of received signals; ε(t) denotes the noise, which can usually be eliminated by smoothing and filtering. The influence of the reflected signal on the GPS receiver is shown in Fig. 1.

Direct and indirect signals at GPS receiver. H denotes that the antenna is located at a height H above the plane. θ is the angle between the GPS signal and the vertical direction
Therefore, the received signal can also be expressed as (Teunissen and Montenbruck 2017):
where \(a_{i}^{d}\) denotes the amplitude of the direct signal; \(a_{i}^{r}\) denotes the amplitude of the reflected and diffraction signals, which is one of the multipath signals. Moreover, the amplitude of the signal is largely dependent on the CNR of the signal (Zhang et al. 2019, Su et al. 2020), which can be indicated as follows:
Based on the above equation, it is clear that the CNR is directly related to the multipath signal. Hence, the CNR of the signal can be effectively used for multipath mitigation.
Relationship between multipath residuals and CNR
To further analyze the rationality that the multipath can be mitigated by using CNR, the relationship between multipath residuals and CNR is presented in this section. Basically, there are two types of multipath residuals. One is the carrier phase multipath, which can be calculated by single difference (SD) postfitting residuals between receivers since these SD residuals only include noise and multipath. The other is the code multipath combination bias, which can be used to denote the pseudorange multipath (MP) residuals (Zhang et al. 2017). Real data sets collected from the Multi-GNSS Experiment (MGEX) CUT0 and CUT2 stations on DOY: 01, 2020 are used to demonstrate the relationship between these two types of multipath residuals and CNR. Both of these two stations are located at Curtin University, Australia.
Figure 2 illustrates the relationship between the SD residuals and CNR of the G02 satellite L1 frequency. The red curve denotes the SD residuals, and the blue curve corresponds to the CNR. It is clear that the SD residuals are inversely proportional to the corresponding CNR, and the smaller the SD residuals are, the greater the CNR is. Specifically, where residuals fluctuate violently, the CNR will exhibit an obvious trough. For example, at epoch 380, the SD residuals fluctuate greatly, and the maximum value is approximately 0.2 or −0.2 m. Correspondingly, the CNR decreased significantly as the SD residuals increased, which from 45 dB-Hz to approximately 27 dB-Hz. A similar phenomenon can also be found at epoch 700. Therefore, based on the above analysis, it can be concluded that the carrier phase multipath residuals maintain a strong relationship with the CNR and are inversely proportional to the CNR.

Relationship between the SD residuals and the CNR for the G02 satellite L1 frequency. The red and blue curves denote SD residuals and CNR, respectively
In addition, Fig. 3 presents the relationship between the MP and CNR of the G02 satellite L1 frequency. It is obvious that Fig. 3 presents similar results to the results of Fig. 2, which indicates that the pseudorange multipath residuals are also inversely proportional to the CNR. At the two troughs of the CNR, the MP bias increased significantly. Similarly, the above results can deduce that the CNR is also correlated with the pseudorange multipath. Therefore, the relationship between the multipath residuals and CNR can be used for multipath mitigation.

Relationship between the MP residuals and the CNR for the G02 satellite L1 frequency. The red and blue curves denote MP residuals and CNR, respectively
To further demonstrate the relationship between multipath and CNR, Table 1 presents the correlation coefficient to show that the CNR is correlated with the SD residuals and the MP pseudorange multipath. In Table 1, it can be seen that both the SD residuals and MP pseudorange multipath exhibit a negative correlation with the CNR. Especially for SD residuals, the character of negative correlation is significant, and the Pearson coefficient reaches approximately −0.6132. Although the value of the Kendall coefficient is smaller than that of Pearson and Spearman, it can still reach −0.5237. However, in terms of MP residuals, the correlation is weaker than SD residuals. The Pearson coefficient only reaches about −0.2840. Two reasons mainly cause this phenomenon. The first is that the accuracy of the carrier phase is higher than the pseudorange since the precision of the carrier phase observation is 100 times that of the pseudorange. The second is that the SD residual is postfitting residuals. Most of the errors are mitigated, such as ambiguity and orbital error. In contrast, the pseudorange multipath is calculated by smoothing the block of ambiguity, and it contains many errors and random noise. Therefore, the correlation of the pseudorange multipath with the CNR is lower than that of the SD residual multipath.
Wavelet packets transform (WPT)
Wavelet transform denoising is mainly used to decompose the signal first; then, the high-frequency noise is removed by thresholding. Finally, the signal can be reconstructed by the wavelet coefficients. However, for wavelet decomposition, only the low-frequency components can be further decomposed in each sublayer, while the high-frequency components are only denoised with no further decomposition (Zhong 2008). This will decrease the frequency resolution as the number of layers increases, and the denoising performance will deteriorate. In terms of wavelet packets transform, both the low-frequency components and the high-frequency components can be further decomposed in each sublayer, effectively improving the performance of the denoising for multipath model extraction (Lau 2015). Therefore, to improve the accuracy of the multipath correction model extraction, the wavelet packets transform is adopted in this method.
Assuming that given the orthogonality scale function \(\varphi \left( x \right)\) and the mother wavelet function \(\psi (x)\), the dyadic function can be expressed as:
where hk and gk are filter coefficients in the analysis of multiresolution. Considering that the multipath signal is discrete, the discrete wavelet packets function is used, which is expressed as:
where j denotes the scale operation; k represents the translation operation; c is called the modulation parameter. Assuming c is equal to 0, the first-level wavelet function can be expressed as:
Then, for c =2, 3..., the wavelet packets bases can be obtained by the following recursive relationship, which is defined as:
where hk and gk are still the filter coefficients in the multiresolution analysis. The structural flowchart of three-level wavelet packets decomposition is shown in Fig. 4.

Flowchart of the three-level wavelet packets decomposition. The SD residuals are the input signal and will be decomposed three times to obtain all high-pass and low-pass coefficients. L and H denote the low- and high-frequency component. Number 1, 2 and 3 denote the level of decomposition
Proposed method
This section presents the proposed method based on adaptive layer-selecting wavelet packets transform, bootstrap searches strategy and CNR constraints. The theoretical ground and feasibility of the proposed method are analyzed with real data sets.
Rationality analysis
To analyze the rationality of the adaptive layer-selecting wavelet packets transform, the real data collected by the MGEX CUT0 station on DOY: 01, 2020 are used in this experiment. The sample rate is 30 s, and the mask angle is set as 10°.
Figure 5 presents the CNR distribution of all satellites on DOY: 01, 2020. The range of the CNR was scattered from 25 dB-Hz to 55 dB-Hz. Table 2 shows the classification results for the data presented in Fig. 5. It can be derived from Table 2 that the CNR is mainly concentrated between 35 dB-Hz and 50 dB-Hz for most epochs, which accounts for 79.56% of all epochs. For epochs larger than 50 dB-Hz, their signal quality is better and usually contains no noise or multipath. In general, the CNR should perform relatively high when the signal is less affected by noise or multipath (Gurtner 1994). Since the CNR is directly related to noise and multipath, it lays a solid foundation for classification processing utilizing wavelet packets transform based on CNR constraints.

CNR distribution of the data collected by the CUT0 station on DOY: 01, 2020
Taking the G01 satellite as an example, the layer-selecting processing strategy of the wavelet packets transform is analyzed in depth. Figure 6 demonstrates the relationship between SD residuals and CNR for the G01 satellite L1 frequency. It is clear that the fluctuation of SD residuals is inversely proportional to the CNR; the higher the CNR is, the lower the SD residuals. For epochs with CNR lower than 40 dB-Hz, the residuals perform obviously larger than those of the other epochs, which means that they are seriously affected by noise or multipath and need to be denoised effectively. For example, the first 100 epochs and the last 50 epochs are shown in Fig. 6.

Relationship between the original SD residuals and the CNR for the G01 satellite L1 frequency. Red and blue denote the SD residuals and CNR, respectively
The original residuals and the results of wavelet packets transform denoising by a decomposition layer from one to four are shown in Fig. 7. The number shown in the upper right corner of the panels is the RMS value of the corresponding residuals series. By comparing the RMS of the series, it can be seen that, based on the same thresholding setting, the higher the number of wavelet decomposition layers, the better the denoising effect is. Specifically, the wavelet packets transform by one layer can only improve by approximately 19.71% compared with the original residuals, but the improvement rate can reach 41.83% for four-layer decomposition. This means that without considering the computational efficiency and the potential loss of useful information, the wavelet packets transform should adopt multilayer decomposition as much as possible.

Denoising results of wavelet packets transform by different decomposition layers for the G01 satellite L1 frequency. “Original” means the bias series of the original SD residuals (top), and “Layer” denotes the bias series denoised by decomposition layers one to four
However, considering the efficiency of the algorithm and avoiding the filtering of useful information, multilayer wavelet packets decomposition is not required for epochs with lower residuals. Figure 8 shows the histogram of SD residuals, which can display the distribution of residuals intuitively. The horizontal axis indicates the SD residuals, and the vertical axis represents normalization of the total data. For example, if the vertical axis value is equal to 0.3, then the number of epochs of this residual can be obtained by 445 × 0.3. Hence, in Fig. 8, it is obvious that most of the residuals are distributed from −0.02 to 0.02 m, and this part of the epochs is less affected by noise and multipath. Based on the above analysis, it can be inferred that for this set of SD residuals, constant layer wavelet packets transform denoising leads to inefficiency for most epochs with lower residuals and reduces the effectiveness of denoising for epochs with larger residuals. Therefore, to enhance the efficiency of the algorithm and improve the accuracy of denoising, the adaptive layering wavelet packets transform is proposed.

Histogram of SD residuals and relative frequency
Adaptive layer-selecting strategy
In the previous subsection, the rationality of adopting different decomposition layers for wavelet packets transform denoising based on CNR is verified. In this section, the specific adaptive layer-selecting strategy based on CNR constraints is given. The optimal number of decomposition layers is determined by using the CNR data criteria. In addition, considering the efficiency of the algorithm and the accuracy of denoising, four layers as the maximum decomposition are adopted in this proposed method.
Option 1: When the CNR is larger than 50 dB-Hz, the decomposition layer of the wavelet packets transform is set to one layer. The main consideration of this option is the case of a high CNR, in which the signal quality is good and less affected by noise. Therefore, the wavelet packets transform denoising can be simplified to improve the efficiency of the algorithm.
Option 2: When the CNR is distributed from 45 to 50 dB-Hz, the decomposition layer of the wavelet packets transform is set to two layers. This part of the signal is slightly affected by noise and multipath, which need to be further processed. Hence, the two layer of wavelet packets transform is selected.
Option 3: When the CNR is distributed from 40 to 45 dB-Hz, the decomposition layer of the wavelet packets transform is set to three layers. The CNR distributed in this range will be affected by noise and multipath. Therefore, a three-layer wavelet packets transform is adopted to denoise the signals in this part to ensure the accuracy of the multipath correction model.
Option 4: When the CNR is lower than 40 dB-Hz, the decomposition layer of the wavelet packets transform is set to four layers. In Figs 5 and 6, it is obvious that the epoch in which the CNR is lower than 40 dB-Hz is seriously affected by noise and multipath. Therefore, a four-layer wavelet packets transform is used to improve the precision of these part of the data.
Bootstrap searching strategy
After extracting the multipath correction model from the reference day, the search strategy needs to be carried out for multipath mitigation on the subsequent observation day. In the traditional multipath mitigation strategy, all epochs will be mitigated on the observation day (Bock et al. 2000). The main idea of the traditional mitigation method is to estimate the accurate initial mitigation epoch by calculating the satellite orbital repeat period shift and then mitigate the multipath for all epochs as a whole by the multipath correction model (Zhong et al. 2010). However, this mitigation strategy has two obvious disadvantages: (1) the accuracy of multipath mitigation largely depends on the precision of the satellite orbital repetition shift, especially for high-frequency sampling rate data. (2) mitigating all epochs without indiscriminating will reduce the mitigation efficiency and decrease the accuracy of mitigation because not every epoch has been affected by multipath.
To overcome these disadvantages, a bootstrap search strategy based on CNR constraints is proposed, and this new search strategy can improve the efficiency and precision of mitigation. Since the multipath causes a fluctuation in the CNR, both the CNR variation between the interfrequency and the CNR difference between adjacent epochs can be used to determine whether the epoch needs to be corrected or not. The process of this strategy is as follows: (1) Calculate the CNR variation between the interfrequency and the CNR difference between adjacent epochs. (2) Compare the calculated value with the empirical model. Both the calculation method and the empirical model of CNR can be found in Su et al. (2020). (3) If the fluctuation exceeds the empirical value, then search the multipath correction model by satellite repeat period shift. The method for estimating the satellite repeat period shift can be found in Su et al. (2018). (4) Mitigate the multipath error by the model value, which is searched in the above process.
In essence, the main advantage of the proposed bootstrap searching strategy is that it increases the efficiency of multipath mitigation and can improve the accuracy of multipath mitigation by performing point-to-point searching correction. This strategy can effectively avoid introducing the unnecessary mitigation error caused by mitigating all epochs as a whole.
Experiments and results
The experiment focuses on the performance analysis of the proposed new method, mainly including the improvement of denoising and the precision of positioning. The real data set used in this experiment was collected on DOY: 216-217, 2020, with a sample rate of 1 Hz, and the total number of epochs was approximately 7300. The length of the baseline is approximately 10 m, and the mask angle is set as 10°. The rover receiver was set at the Wuhan University GNSS research center, and the surroundings of the receiver include some buildings and trees, which can generate the multipath signal. Secondary development software based on the open source processing software RTKLIB (Takasu and Yasuda 2009) is used, and the implementation language is the C programming language. Therefore, this data set can be used to evaluate the performance of the proposed method.
Performance analysis of denoising
The multipath mitigation performance largely depends on the denoising effect during multipath model extraction from the reference day. Thus, the denoising performance of the proposed method is analyzed first in this section. The data set described above DOY: 216, 2020 is used for this analysis.
Taking the G19 satellite as an example, the effectiveness of denoising by a constant with three layers (CL) (Azarbad 2014, Lau 2015) and adaptive layer selection (AL) is presented in Fig. 9. It can be seen from the original results that the satellite was seriously affected by multipath error. The fluctuation is obvious in the residuals, such as the epoch between 900 and 1100. As shown in Fig. 9, both the CL and AL methods can effectively reduce the RMS of the original residuals. Specifically, the RMS of the CL is reduced from 3.08 to 2.49 cm, and the improvement rate is approximately 19.16% compared with the original bias. However, the RMS of the AL is reduced from 3.08 to 2.13 cm, and the improvement rate reaches 30.84% compared with the original bias. Even compared with the CL method, the proposed AL method can also improve denoising by approximately 14.46%. This result indicates that the proposed AL method performs better than the CL method in multipath model extraction.

Bias series of the SD L1 residuals, Original residuals (OR), denoised series by constant with three-layers wavelet packets decomposition (CL) and adaptive layer-selecting (AL) methods of L1 frequency for G19 satellite
To further demonstrate the denoising performance of the proposed method, the improvement rates of the RMS of the SD L1 residuals for all satellites by adopting the CL and AL methods are presented in Fig. 10. The blue bar and orange bar denote the CL and AL methods, respectively. As shown in Fig. 10, the AL method performs much better than the CL method for most satellites. Among them, the best performance of the improvement rate is that of satellite G29 with the AL method, which is approximately 33.93%. Even for the worst satellite, such as G12, the improvement rate can also reach 17.27% for the AL method. The mean improvement rate of the CL method is 14.96% compared with the original result. In contrast, the mean improvement rate of the proposed AL method can reach 25.33% compared with the original results. Therefore, it can be concluded that the proposed AL method can improve the precision of multipath model extraction for most satellites.

Improvement percentage of the RMS value of the SD L1 residuals for all GPS satellites compared with the original result. CL denotes the method with constant layer, and AL denotes the method with adaptive layer-selecting
It is worth noting that, for the AL method, although most of the satellites show a significant improvement compared with the CL method, there are still some satellites that are hardly improved, such as satellite G13. The main reason for this phenomenon is that these satellites are less affected by multipath interference and noise. The CNR of these satellites is relatively high compared with the satellite seriously affected by multipath and noise. In this case, the number of epochs that need to be decomposed by four layer is decreasing; the number of decomposition layers for these two methods is also nearly consistent with each other. Thus, the performance of the AL method is similar to that of the CL method.
The distribution of CNR for G13 and G29 satellites is demonstrated in Fig. 11. It is obvious that for satellite G13, the CNR of this satellite is mainly distributed between 40 and 45 dB-Hz. For the epoch distributed in this range, both the CL and AL methods adopt three-layers decomposition. Therefore, the improvement rates of these two methods are similar. In contrast, in terms of satellite G29, the CNR of most epochs is distributed lower than 40 dB-Hz. This phenomenon is significantly different from satellite G13. Based on the adaptive layer-selecting strategy, the epoch scattered in this range should be decomposed by four layers to filter the noise as much as possible. This is largely different from the CL method, in which the decomposition is constant. Hence, for satellite G29, the proposed AL method performs much better than the CL method. Table 3 also presents the concrete statistical results of CNR for G13 and G29 satellites. In Table 3, it can be seen that the CNR between 40 and 45 dB-Hz accounts for 87.15% for satellite G13. However, for satellite G29, the CNR between 40 and 45 dB-Hz only accounts for 6.73%, and the CNR lower than 40 dB-Hz accounts for almost 93.27%. Hence, this result is consistent with Fig. 10.

Distribution of CNR for G13 and G29 satellites
Through the above analysis, we conclude that the proposed AL method can improve the effectiveness of denoising compared with the constant layer method. Moreover, for this proposed method, the greater the influence of the noise and multipath, the better the improvement. After denoising, a high-precision multipath correction model was extracted, which lays the foundation for multipath mitigation.
Performance analysis of positioning
After the multipath correction model has been extracted on the reference day, the multipath can be mitigated by the search strategy on the subsequent observation day. Essentially, the ultimate purpose of multipath mitigation is to improve the precision of the positioning. Therefore, the positioning performance is evaluated in this section.
Figure 12 demonstrates the positioning bias results of the three components of the original bias with uncorrected (UC), corrected by adopting the traditional constant layering mitigation method (denoted by CL) and the proposed method (still denoted by AL for convenience) based on CNR constraints. In Figure 12, it can be seen that the proposed AL method can effectively improve the precision of positioning for three components. In particular, for the upper component, the RMS is reduced from 0.89 to 0.55 cm after applying the proposed AL method compared with the original results. Even compared with the CL method, the RMS of the upper component is also decreased by 0.24 cm, and the improvement is obvious.

Coordinate time series obtained from three components by UC, CL and AL in continuous mode. The number shown in the lower right corner of the plots indicates the RMS value of the corresponding coordinate time series
In addition, it should be noted that, although the correction accuracy of the AL method in all three components is much higher than that of the CL method on the whole, AL deteriorates in some epochs. This phenomenon occurs in the final stages of the eastern component, which is between 6500 and 7000 epochs. This is because the proposed AL method is mainly used for point-to-point correction, and the multipath error of this part epoch is not seriously affected, which can be seen from the RMS in the other two components. In this case, the variation in the CNR difference between adjacent epochs may be caused by noise or other elements. In this case, it will lead to the proposed bootstrap searching strategy deterioration in the multipath mitigation.
To further investigate the performance of multipath mitigation, the concrete RMS statistics of the three components and the improvement rate of the two methods are also presented in Table 4. As demonstrated in the column of Imp(O) for the CL method, the CL method can also improve the RMS of the positioning bias to a certain degree, but the improvement rates are only 7.69, 12.50 and 11.24% for the three components. However, after applying the AL method, the improvement rate of all three components is increased significantly, especially for the upper component. The improvement rate is approximately 30.38% compared with the CL method. This phenomenon is mainly that the upper component is more seriously affected by multipath and noise. Therefore, the proposed new method will perform much better in a multipath environment than in a normal observation environment.
Based on the above analysis, it can be concluded that the proposed new method can not only improve the effectiveness of denoising for extracting an accurate multipath correction model but also enhance the precision of multipath mitigation. Therefore, this proposed new multipath mitigation method can be applied for GNSS static relative positioning in a multipath environment.
Conclusions
We presented a new multipath mitigation method based on adaptive layer-selecting wavelet packets denoising, bootstrap searching strategy and CNR constraints for GNSS static relative positioning. The theory of multipath indicates that the CNR is directly related to the amplitude of GNSS signals; it is a foundation that multipath can be detected and mitigated based on CNR constraints. The results of the experiment demonstrated that CNR is correlated with the carrier phase and pseudorange multipath, which verified the relationship between the multipath residuals and CNR. Therefore, the CNR can be used for multipath mitigation. In addition, the rationality of the adaptive layer-selecting wavelet packets transform denoising strategy is also analyzed by a real data set.
The performance of the denoising and positioning is evaluated by a real data set for the proposed method. Experimental results demonstrate that the proposed method performs much better than the traditional constant layer method for most satellites in denoising, and the maximum improvement rate is approximately 33.93% for satellite G29. Statistically, the mean improvement rate of the proposed method can reach 10.37% compared with the CL method for multipath model extraction. For positioning, the proposed method can also effectively improve the precision of the three components. The mean improvement rate of the three components is approximately 37.74% compared with the original result. Even compared with the CL method, the mean improvement rate of the three components can also reach 25.60%. In addition, it is worth noting that this new method can be used for GPS systems and is suitable for static relative positioning in other GNSS systems.
Data availability
The first data set which used in section 2 and 3 is collected from the IGS MGEX networks. The second data set analyzed in this experiment can be made available by the corresponding author on request.
References
Axelrad P, Comp C, Macdoran P (1996) SNR based multipath error correction for GPS differential phase. IEEE Trans Aerosp Electron Syst 32(2):650–660. https://doi.org/10.1109/7.489508
Azarbad M, Mosavi M (2014) A new method to mitigate multipath error in single- frequency GPS receiver with wavelet transform. GPS Solutions 18(2):189–198. https://doi.org/10.1007/s10291-013-0320-1
Benton C, Mitchell C (2011) Isolating the multipath component in GNSS signal-to-noise data and locating reflecting objects. Radio Sci. https://doi.org/10.1029/2011RS004767
Bock Y, Nikolaidis R, Jonge P, Bevis M (2000) Instantaneous geodetic positioning at medium distances with the Global Positioning System. J Geophys Res 105(105):28223–28254. https://doi.org/10.1029/2000JB900268
Fuhrmann T, Luo X, Knopfler A, Mayer M (2015) Generating statistically robust multipath stacking maps using congruent cells. GPS Solutions 19(1):83–92. https://doi.org/10.1007/s10291-014-0367-7
Ge L, Han S, Rizos C (2000) Multipath mitigation of continuous GPS measurements using an adaptive filter. GPS Solutions 4(2):19–30. https://doi.org/10.1007/PL00012838
Groves PD, Jiang Z (2013) Height Aiding, C/N 0 Weighting and Consistency Checking for GNSS NLOS and Multipath Mitigation in Urban Areas. J Navigation 66(05):653–669. https://doi.org/10.1017/S0373463313000350
Gurtner W (1994) RINEX: The receiver-independent exchange format. GPS World 5(7):48–52
Hsu LT, Jan SS, Groves PD, Kubo N (2015) Multipath mitigation and NLOS detection using vector tracking in urban environments[J]. GPS Solutions 19(2):249–262
Lau L (2015) Wavelet packets based denoising method for measurement domain repeat- time multipath filtering in GPS static high-precision positioning. GPS Solutions 21(2):461–474. https://doi.org/10.1007/s10291-016-0533-1
Liu X, Liu H, Guo Q, Zhang C (2020) Adaptive wavelet transform model for time series data prediction. Soft Comput 24:5877–5884. https://doi.org/10.1007/s00500-019-04400-w
Rost C, Wanninger L (2009) Carrier phase multipath mitigation based on GNSS signal quality measurements. J Appl Geodesy 3(2):81–87. https://doi.org/10.1515/JAG.2009.009
Shen N, Chen L, Wang L, Lu X, Tao T, Yan J, Chen R (2020) Site-specific real-time GPS multipath mitigation based on coordinate time series window matching. GPS Solutions. https://doi.org/10.1007/s10291-020-00994-z
Strode R, Groves P (2016) GNSS multipath detection using three-frequency signal-to-noise measurements. GPS Solutions 20(3):399–412. https://doi.org/10.1007/s10291-015-0449-1
Su M, Zheng J, Yang Y, Wu Q (2018) A new multipath mitigation method based on adaptive thresholding wavelet denoising and double reference shift strategy. GPS Solutions. https://doi.org/10.1007/s10291-018-0708-z
Su M, Yang Y, Qiao L, Teng X, Song H (2020) Enhanced multipath mitigation method based on multi-resolution CNR model and adaptive statistical test strategy for real-time kinematic PPP. Adv Space Res. https://doi.org/10.1016/j.asr.2020.10.035
Takasu T, Yasuda A (2009) Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. International symposium on GPS/GNSS, Seogwipo-si Jungmundong, Korea, 4–6 November
Teunissen PJG, Montenbruck O (2017). Springer handbook of global navigation satellite systems. https://doi.org/10.1007/978-3-319-42928-1
Wang D, Meng X, Gao C, Pan S, Chen Q (2017) Multipath extraction and mitigation for bridge deformation monitoring using a single-difference model. Adv Space Res 10(59):2536–2547. https://doi.org/10.1016/j.asr.2017.01.007
Wang M, Wang J, Dong D, Li H, Han LW, Chen (2018) Comparison of three methods for estimating GPS multipath repeat time. Remote Sens 10(2):6. https://doi.org/10.3390/rs10020006
Wanninger L, May M (2001) Carrier-phase multipath calibration of GPS reference stations. Navigation 48(2):112–124. https://doi.org/10.1002/j.2161-4296.2001.tb00266.x
Zhang X, Wu M, Liu W, Li X, Yu S, Lu C, Wickert J (2017) Initial assessment of the COMPASS/BeiDou-3: new-generation navigation signals. J Geodesy 91(10):1225–1240. https://doi.org/10.1007/s00190-017-1020-3
Zhang K, Li B, Zhu X, Chen H, Sun G (2017) Multipath detection based on single orthogonal dual linear polarized GNSS antenna. GPS Solutions 21(3):1203–1211. https://doi.org/10.1007/s10291-017-0603-z
Zhang Z, Li B, Gao Y, Shen Y (2019) Real-time carrier phase multipath detection based on dual-frequency C/N0 data. GPS Solutions 23:7. https://doi.org/10.1007/s10291-018-0799-6
Zhong P, Ding X, Zheng D, Chen W (2008) Adaptive wavelet transform based on cross- validation method and its application to GPS multipath mitigation. GPS Solutions 12(2):109–117. https://doi.org/10.1007/s10291-007-0071-y
Zhong P, Ding X, Yuan L, Xu Y, Kwok K, Chen Y (2010) Sidereal filtering based on single differences for mitigating GPS multipath effects on short baselines. J Geodesy 84(2):145–158. https://doi.org/10.1007/s00190-009-0352-z
Acknowledgments
This research is funded by Zhejiang Youth Fund grant No. LQ20D010007. Basic scientific research operating expenses of provincial university grant No.GK209907299001-27 and Department of Education of Zhejiang Province general scientific research project Grant No.Y202044437.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Su, M., Yang, Y., Qiao, L. et al. Multipath extraction and mitigation for static relative positioning based on adaptive layer wavelet packets, bootstrapped searches and CNR constraints. GPS Solut 25, 123 (2021). https://doi.org/10.1007/s10291-021-01160-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-021-01160-9