
Abstract
In this article, we develop and analyze an efficient numerical technique to solve the nonlinear temporal fractional Burgers’ equation (TFBE). The temporal fractional derivative is considered in the terms of Caputo and approximated by using the \(L2-1_{\sigma }\) scheme. The quintic B-spline (QBS) basis function is employed for discretization of the space derivative to obtain a fully discrete scheme. The proposed method is analyzed for its convergence and stability. Four nonlinear problems are considered to illustrate the advantage and applicability of the present method. The proposed scheme has an order of convergence \(O(\varDelta t^{2}+\varDelta x^4)\), where \(\varDelta t\) and \(\varDelta x\) are the step sizes in time and space directions, respectively. The comparison with the corresponding results of an existing method based on cubic parametric spline functions demonstrates that the proposed method is more accurate when solving the nonlinear time-fractional Burgers’ equation. The CPU time is provided to show the computational efficiency of the method. The obtained stable and highly-accurate numerical results and low computational time collectively underscore the significance of the proposed technique in solving the nonlinear time-fractional Burgers’ equation.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, the differential equations of fractional order have become center of attraction among researchers due to their wide range of applications in applied sciences and engineering. For more details, one may refer to Podlubny (1999), Giona et al. (1992), Mainardi (1997), Bagley and Torvik (1984), Roul et al. (2019b), Roul et al. (2019c), Veeresha et al. (2020), Roul et al. (2023), Roul (2020), Roul (2021), Roul and Goura (2020) and references therein. It is well known that the fractional order derivatives can model complex phenomena more accurately than the derivatives of integer order.
In this article, we deal with the following nonlinear TFBE:
where \(\nu \) represents the viscosity parameter and f(x, t) is the source term. The initial condition (IC) is
and the boundary conditions (BCs) are
The functions \(f(x,t),\, g(x),\, {\theta }_{1}(t)\) and \({\theta }_{2}(t)\) are assumed to be sufficiently smooth. The Caputo fractional derivative \(\frac{\partial ^{\alpha } u(x,t)}{\partial t^{\alpha }}\) in (1) is defined as follows:
Burgers’ equation has numerous applications in various fields of science and engineering and thus the researchers worldwide have been showing keen interest in the study of this equation. More specifically, this equation describes nonlinear wave propagation effects, waves on shallow water surfaces, chemical reaction-diffusion processes and one-dimensional turbulence, see Logan (1994), Debtnath (1997), Adomian (1995), Burgers (1948). The existence and uniqueness of solutions to the Burgers’ equation of integer order have been discussed in Gyöngy (1998), Wang and Warnecke (2003). For the fractional Burgers’ equation, the existence and uniqueness of the solution is discussed by Guesmia and Daili (2010). Kolkovska (2005) considered the stochastic Burgers-type equation and studied the existence and regularity of solutions in appropriate Hilbert spaces. Vieru et al. (2021) numerically investigated the generalized time-fractional Burgers’ equation with variable coefficients, utilizing a finite-difference scheme based on integral representations of Mittag–Leffler functions. The approach is applied to specific cases, revealing numerical solutions and comparisons for different time-fractional derivatives. In Chen et al. (2021), the authors introduced a nonlinear fully discrete scheme, utilizing the nonuniform Alikhanov formula and Fourier spectral approximation, for numerically approximating the time-fractional Burgers equation with nonsmooth solutions. This scheme’s solvability is established through fixed point theorem and a priori estimate. Recently, Shafiq et al. (2022) employed cubic B-spline functions and a \(\theta \)-weighted scheme to numerically solve the time-fractional Burgers’ equation with the Atangana–Baleanu derivative, demonstrating its unconditional stability and second-order convergence in temporal and spatial directions through finite-difference discretization. It is well known that Burgers’ equation and Navier–Stokes equation are similar in the form of their nonlinear terms.
In most of the cases, obtaining an exact solution to the partial differential equations (PDEs) involving fractional order derivatives is a challenging task. Therefore, numerical techniques must be adapted to approximate the solution of temporal fractional order PDEs. Many authors employed various kinds of numerical methods to solve the TFBE. For instance, Mustafa Inc. Inc (2008) considered the application of variational iteration method for numerical solution of the homogeneous form of the time-fractional Burgers’ equation (1). Liu and Hou (2011) proposed the generalized differential transform method to obtain numerical solution of the space- and time-fractional coupled Burgers’ equation. In El-Danaf and Hadhoud (2012), authors developed general framework of the cubic parametric spline functions to construct a numerical technique for obtaining the approximate solution of TFBE. Yaseen and Abbas (2020) constructed a numerical method to solve the problem considered. In this method, they considered the standard finite-difference formulation to approximate the Caputo time-fractional derivative and used cubic trigonometric B-spline functions for the discretization of space variable. This method is first order convergent in time and second order convergent in space. In Majeed et al. (2020), authors presented a numerical method based on cubic B-spline finite element method to solve the TFBE. They have approximated the Caputo fractional derivative using the L1 formula for temporal discretization and then used the Crank–Nicolson scheme based on cubic B-spline basis functions for the spatial discretization. This scheme has \(O(\varDelta t^{2-\alpha }+\varDelta x^2)\) convergence rate. On the other hand, various numerical techniques were used to obtain the numerical solution of Burgers equation of integer order. These methods include finite-difference method (Hassanien et al. 2005), finite element method (Kutluay et al. 2004) and B-spline collocation methods (Ramadan et al. 2005; Saka and Dag 2008).
Our main objective is to develop an efficient and high-order numerical method for solving TFBE (1)–(3). The proposed method is based on the \(L2-1_{\sigma }\) scheme in temporal direction and the QBS basis function in the spatial direction. The stability and convergence of this scheme are analyzed, demonstrating that it achieves second-order convergence in time and fourth-order convergence in space. The comparison of the results obtained by the present scheme with those obtained using the method in El-Danaf and Hadhoud (2012) illustrates the advantage of the proposed method. The computational time of the present method is provided. To the best of our knowledge, this scheme has not been considered in the literature for the numerical approximation of the problem defined by (1)–(3).
This paper is organized as follows: in Sect. 2, the proposed numerical method is developed to solve the TFBE. The stability and convergence of our method are discussed in Sect. 3. The obtained numerical results are explained in Sect. 4. Section 5 discusses the conclusions.
2 Numerical scheme description
This section aims to derive a numerical scheme to solve the TFBE (1) subject to IC and BCs given in Eqs. (2) and (3), respectively.
2.1 Time discretization
First, we discretize the problem (1)–(3) in temporal direction on [0, T]. For an integer \(N>1\), we set \(t_n=n \varDelta t\) for \(n=0,1,\ldots , N\). The uniform time step size is given by \(\varDelta t=\frac{T}{N}\). Suppose that \(t_{n-1+\sigma }=(n-1+\sigma )\varDelta t\), where \(\sigma =1-\frac{\alpha }{2}\).
In view of the \(L2-1_{\sigma }\) formula (Alikhanov 2015), the Caputo derivative defined by (4) can be approximated at \(t=t_{n-1+\sigma }\) as follows:
where the coefficients are defined as
and when \(n\ge 2\)
where
The truncation error term \(O(\varDelta t^{3-\alpha })\) in (5) comes under the assumption that \(u(\cdot ,t) \in {\mathbb {C}}^3[0, T ]\).
Lemma 1
(Alikhanov 2015) For \(c^{\alpha }_j,\) \(0<\alpha <1\), the following holds true:
-
(1)
\(c^{\alpha }_j>\frac{1-\alpha }{2}(j+\sigma )^{-\alpha }\ge 0,\; j\ge 0,\)
-
(2)
\(c^{\alpha }_{j-1}>c^{\alpha }_{j}, \;j\ge 1. \)
We consider (1) at \(t=t_{n-1+\sigma }\) and let \(u(x,t_n)=u^n(x),\) to obtain
with IC
and BCs
Using Eq. (5), from (8), we have
Via Taylor’s expansion, we have
Multiplying Eqs. (12) and (13), we get
Plugging (14) and (15) into (11) and rearranging the terms, we obtain
with \( \varTheta =\frac{\varDelta t^{-\alpha }}{\varGamma (2-\alpha )}.\)
We linearize the term \(\left( uu_{x}\right) ^n(x)\) as follows Rubin and Graves (1975):
Substitution of (17) into (16) and the rearrangement of the terms lead to
2.2 Space discretization
Here, we discretize Eq. (18) using a collocation method based on QBS basis function in spatial direction.
For a given \(M>1\), we consider a uniform partition \(I=\bigl \{X_l = x_0<x_1<\cdots < x_{M} = X_r\bigr \}\) over the domain \(\left[ X_l,X_r\right] \), with \(x_{m}=m\varDelta x,\) where \(\varDelta x\) represents the spatial mesh size and \(m=0,1,\ldots ,M\). We define the midpoints of the subintervals of I by \(\tau _{m}=\frac{x_{m-1}+x_{m}}{2}, m=1,2,\ldots ,M\). Suppose that the set of these points be \({\pi }_I = \{\tau _{1}<\tau _{2}<\cdots <\tau _{M}\}\). Let \(S_{5,I} = \{p(x)| p(x)\in {\mathbb {C}}^4[X_l, X_r]\)} be the quintic-spline space (QSS). The QBS basis functions, \(Q_{k}(x)\), \(-2 \le k \le M+2\), for \(S_{5,I}\) are given by Boor (1978)
To support the QBS basis functions, additional 10 grid points are included outside the interval I, denoted as \(x_{-5}<x_{-4}<x_{-3}<x_{-2}<x_{-1}<x_{0}=X_l\) and \(x_{M}=X_r<x_{M+1}<x_{M+2}<x_{M+3}<x_{M+4}<x_{M+5}\). Let \(\tilde{Q}=\{Q_{{-}2}(x), Q_{{-}1}(x), Q_{0}(x),\ldots , Q_M(x), Q_{M{+}1}(x), Q_{M+2}(x)\}\) be the set of QBS basis functions, which is linearly independent. We define \(Q^*(I)\) as the span of \({\tilde{Q}}\) over the interval I. Therefore, \(Q^*(I)\) is a \(M+5\) dimensional QSS. It can be observed that \(Q^*(I)=S_{5,I}\) (Prenter 1975), hence, \(S_{5,I}\) is a QSS over I.
Let \(\hat{\varPsi }^{n}(x)\) represent the approximation of the exact solution \(u^{n}(x)\) of (9)–(11). It can be expressed as
where \(\hat{\lambda }_k^n\)’s are the constants that need to be determined. The values of \(\hat{\varPsi }^n(x)\), as well as its derivatives upto second-order, are computed at \(x=x_m\) (for \(0\le m\le M\)) and \(x=\tau _m\) (for \(1\le m\le M\)), as presented in Table 1, using (19). Using the information provided in Table 1, we obtain the following relations:
Theorem 1
Consider the quintic-spline interpolant (QSI) \({\varPsi }^n(x)\) of \(u^n(x)\in {\mathbb {C}}^{6}[X_l,X_r] \). Then,
and
Proof
The proof of this result is analogous to the argument presented in Theorem 2.1 of Roul et al. (2019a). \(\square \)
Theorem 2
Consider the QSI \({\varPsi }^n(x)\) of \(u^n(x)\in {\mathbb {C}}^{6}[X_l,X_r] \). Then,
and
Proof
The proof of this result is analogous to the argument presented in Theorem 2.2 of Roul et al. (2019a). \(\square \)
Theorem 3
Consider the QSI \({\varPsi }^n(x)\in S_{5,I}\) of \(u^n(x)\in {\mathbb {C}}^{6}[X_l,X_r]\). Then, we can obtain (refer to Theorem 2.3 of Roul et al. (2019a)):
with \(D^{p}=\frac{\partial ^p}{\partial x^p}.\)
Considering (18) at \(x=x_m,\) one can obtain
The BCs (10) lead to
According to the collocation approach, we make \(\hat{\varPsi }^n(x)\) to satisfy (28)–(29) at the nodal points. Thus, from (28) to (29), we obtain
Inserting the expressions for \(\hat{\varPsi }^n(x_m)\), \(\hat{\varPsi }_x^n(x_m)\) and \(\hat{\varPsi }^n_{xx}(x_m)\) from (21), (22) and (23), respectively, into (30) yields
where
and
Equations (32) and (33)–(34) form a system of \((M+3)\) linear algebraic equations with \((M+5)\) unknowns. To make the system feasible, we need two auxiliary equations. These additional equations are obtained by enforcing \(\hat{\varPsi }^n(x)\) to satisfy (28) at the midpoints \({\tau }_{m}\) for \(m=1, M.\) Therefore, we obtain
Making use of (24), (25) and (26) in (35) leads to
where
and
Equations (32), (33), (34) and (36) give a linear system of \((M+5)\) equations in \((M+5)\) variables \(\hat{\lambda }_{-2}^n, \hat{\lambda }_{-1}^n, \hat{\lambda }_{0}^n, \ldots ,\hat{\lambda }_{M}^{n}, \hat{\lambda }_{M+1}^n, \hat{\lambda }_{M+2}^n.\) We rewrite this system in the matrix form as follows:
where \(\hat{\lambda }^{n}=(\hat{\lambda }_{-2}^n, \hat{\lambda }_{-1}^n, \hat{\lambda }_0^n,\ldots ,\hat{\lambda }_{M}^{n}, \hat{\lambda }_{M+1}^n, \hat{\lambda }_{M+2}^n)^{T}\). The matrices \(P, \, H^{n-1}\) and \( F^{n}\) are defined as:
3 Stability and convergence of the method
In this section, we analyze the stability and convergence properties of the proposed method for solving the problem (1)–(3).
3.1 Stability analysis
Here, we analyze the stability of the numerical method given by (37).
Theorem 4
The stability of the proposed method (37) for the considered problem is unconditional.
Proof
It can be seen that the right hand side function f(x, t) does not influence the stability of our proposed method. So, the proof for unconditionally stability of the method is performed in the case when \(f(x,t)=0\). For simplicity, we linearize the nonlinear term \(uu_x\) by setting u as a constant \(\mu \) in (11). Then, we obtain
Using (13) and (14) in (38), we have
Now, using the method described in Sect. 2 for Eq. (39) yields
where \(\eta _1=\frac{\varTheta c_0^{\alpha }}{120},\) \(\eta _2=\frac{\sigma \mu }{24 \varDelta x},\) \(\eta _3=\frac{\sigma \nu }{6 \varDelta x^2},\) \(\eta ^*_1=\frac{\varTheta c_0^{\alpha }}{3840},\) \(\eta ^*_2=\frac{\sigma \mu }{384 \varDelta x}\) and \(\eta ^*_3=\frac{\sigma \nu }{48 \varDelta x^2}.\)
The error \({\zeta }^n_m\) is defined by
with \(\lambda {^*}_m^n\) representing the solution of the perturbed system of (40)–(41). Using (42), we can get the following error equations for (40)–(41):
The error \({\zeta }_{m}^{n}\) can be chosen as
where \(i=\sqrt{-1}\). Inserting (45) into (43) yields
The above equation can be rewritten as
From Eq. (47), we have
where \(\gamma _1={\cos }(\rho \varDelta x)+26{\cos }(\rho \varDelta x)+33,\) \( \gamma _2=3-{\cos }(2\rho \varDelta x)-2{\cos }(\rho \varDelta x)\) and \( \gamma _3=\sin (2\rho \varDelta x)+10\sin (\rho \varDelta x).\)
By means of mathematical induction, we prove that
For \(n=1,\) (48) leads to
Since \(\sigma \in \left( \frac{1}{2},1\right) \), we have
Furthermore, as \(\varDelta t>0\), \(\varDelta x>0\), \({\nu }\ge 0\) and \(0<\alpha <1\), it can be concluded that \(\varGamma (2-\alpha )>0\) and \(\eta _1,\, \eta _2,\, \eta _3\) are positive. Therefore, taking into account (51), from (50) we get
Thus, (48) holds for \(n=1\). Assume that (48) holds for \(n\le j-1\), that is,
For \(n=j,\) (48) leads to
where \(A=\frac{\varTheta \gamma _1}{120}\Bigg [\displaystyle \sum _{l=1}^{j-1}\left( c^{\alpha }_{j-l-1} -c^{\alpha }_{j-l}\right) {\xi }^{l}+c^{\alpha }_{j-1} {\xi }^0\Bigg ]-\left( \frac{1-\sigma }{\sigma }\right) \eta _3\gamma _2{\xi }^{j-1}\), \(B=\left( \frac{1-\sigma }{\sigma }\right) \eta _2\gamma _3{\xi }^{j-1}\), \(C=\eta _1\gamma _1+\eta _3\gamma _2\) and \(D=\eta _2\gamma _3\).
Making use of Lemma 1 and (53), one can get
Finally, making use of (55) into (54), we get
which gives
Hence, the result is valid for \(n=j\). Therefore, (49) is valid for every n, i.e.,
Substituting (45) into (44), we obtain
Simplifying the terms in (59) yields
From (60), we have
where
Using the triangle inequality, the following estimate is obtained:
Moreover, it is clearly observed that
By means of mathematical induction and (63), one can prove that
From (58) and (64), one can conclude that the present numerical scheme (37) is unconditionally stable. \(\square \)
3.2 Convergence analysis
This section is devoted to the convergence analysis of the proposed scheme (37) for (1)–(3).
Theorem 5
Assume that \(\hat{\varPsi }^{n}(x)\) be the QBS approximation of the solution \(u^n(x)\in {\mathbb {C}}^{6}[X_l,X_r]\) for (1)–(3). Then, for sufficiently small \(\varDelta x\) and a constant \({\mathcal {L}}\) independent of \(\varDelta x\), we have
Proof
Linearizing the nonlinear term \(uu_x\) in (11) by taking u as a constant \(\mu \), we obtain
From the boundary conditions, we have
Making use of the approximations (13) and (14) into (66) and then rearrangements of the terms leads to
In operator form, Eqs. (67) and (68) can be expressed as
where
Let \({\varPsi }^{n}(x)\in S_{5,I}\) be the QSI to the exact solution of (68) and (67). Let \({\varPsi }^n(x)\) be given as
By means of Theorems 1 and 2, we have
As \(u^{n}(x_{m})=\hat{\varPsi }^n(x_{m}),\hspace{0.1cm} 0\le m\le M\) and \(u^{n}({\tau }_{m})=\hat{\varPsi }^n({\tau }_{m}),\hspace{0.1cm}m=1,M,\) thus, Eqs. (73)–(75) can be written in the matrix form, as follows:
where \(E=[O(\varDelta x^4), O(\varDelta x^4),\ldots ,O(\varDelta x^4),O(\varDelta x^4)]^{T}\).
For \(x=x_0\), from (76), we obtain
For \(x=x_M\), from (76), we obtain
For \(x=\tau _{1}\), from (76), we obtain
For \(x=\tau _{M}\), from (76), we obtain
By utilizing (33) and (34), the unknowns \({\lambda }_{-2}^n, {\lambda }_{M+2}^n, \hat{\lambda }_{-2}^n\) and \(\hat{\lambda }_{M+2}^n\) can be eliminated from (77)–(80). Hence, for \(x=x_0\), we get
For \(x=x_M\), we obtain
For \(x=\tau _{1}\), we obtain
For \(x=\tau _{M}\), we obtain
For \(x=x_m\), \(m=1,2,\ldots ,M-1\), from (76), we obtain
Equations (81)–(85) can be expressed as
where R is a \((M+3)\times (M+3)\) matrix given by
where \(d_1=\eta _1-\eta _2-\eta _3,\, d_2=26\eta _1-10\eta _2-2\eta _3,\, d_3= 66\eta _1+6\eta _3,\, d_4= 26\eta _1+10\eta _2-2\eta _3,\, d_5=\eta _1+\eta _2-\eta _3, \, d_6= 16\eta _2+24\eta _3,\, d_7 =66\eta _2+72\eta _3, \, d_8=36\eta _2+24\eta _3,\, d_9= 2\eta _2,\, {\tilde{d}}_1=211\eta ^*_1-49\eta ^*_2+5\eta ^*_3,\, {\tilde{d}}_2= 1616\eta ^*_1-88\eta ^*_2+88\eta ^*_3,\, {\tilde{d}}_3= 1656\eta ^*_1+180\eta ^*_2+48\eta ^*_3, \, {\tilde{d}}_4=236\eta ^*_1+76\eta ^*_2-20\eta ^*_3,\, {\tilde{d}}_5= \eta ^*_1+\eta ^*_2-\eta ^*_3, \, {\tilde{d}}_6=211\eta ^*_1+49\eta ^*_2+5\eta ^*_3,\, {\tilde{d}}_7= 1616\eta ^*_1+88\eta ^*_2+88\eta ^*_3, \, {\tilde{d}}_8=1656\eta ^*_1-180\eta ^*_2+48\eta _3,\, {\tilde{d}}_9=236\eta ^*_1-76\eta ^*_2-20\eta ^*_3, \, {\tilde{d}}_{10}=\eta ^*_1-\eta ^*_2-\eta ^*_3, \,{\hat{d}}_6= -16\eta _2+24\eta _3,\, {\hat{d}}_7 =-66\eta _2+72\eta _3 \,\) and \(\,{\hat{d}}_8=-36\eta _2+24\eta _3.\)
Let \(s_{i}\, (-1\le i\le M+1)\) denote the sum of ith row of R. Thus, we obtain
For sufficiently small \(\varDelta x,\) we have \(s_{-1}>0, s_{0}>0, s_{k}> 0, k=1,\ldots ,M-1, s_{M}>0\) and \(s_{M+1}>0\). Thus, R exhibits monotonicity and consequently, \({R}^{-1}\) is well defined. Let \(r^{-1}_{k,j}\) be the (k, j)th element of \({R}^{-1}.\) Making use of the theory of matrices, we obtain
Using (87), we have
By Taylor’s expansion, we have
From (86), we have
Therefore, we have
Moreover, using (33), (34) and (90), we can obtain that
Now, from (20) and (72), we can have
By the definition of \(Q_{k}(x)\), it is easily observed that
Taking the \(L_\infty \) (maximum) norm on (92) and using (90), (91) and (93), we obtain
where \({\mathcal {N}}=\frac{186}{120}{\mathcal {K}} \). From Theorem 3, we have
The triangle inequality gives
Using (94) and (95), from (96), we have
Hence, Theorem 5 is proved. \(\square \)
Theorem 6
Suppose that \(\hat{\varPsi }(x,t)\) and u(x, t) be the QBS approximate solution and exact solution of TFBE, respectively. Then, for \(u(x,t) \in {\mathbb {C}}^{6}[X_l,X_r] \times {\mathbb {C}}^3[0,T]\), it follows that
Proof
Applying Theorem 5 and utilizing Eq. (18), we can derive the expression in (98). \(\square \)
4 Numerical illustrations
Here, four nonlinear problems are considered to demonstrate the effectiveness and accuracy of the proposed method (37). The computed result is compared with that obtained by other method based on cubic parametric spline functions (El-Danaf and Hadhoud 2012). We compute the \(L_{\infty }\) norm error \(({\mathcal {E}}^{M}_{1})\) of the proposed method which is defined as
where \(u(x_m,t_n)\) and \(\hat{\varPsi }_m^n\) are the exact and approximate solutions, respectively, at the grid point \((x_m,t_n)\). We calculate the OOC (order of convergence) of the present numerical method based on \(L_{\infty }\) norm error by the formula:
The numerical computations are performed in MATLAB R2020a on a computer equipped with an AMD Ryzen 5 2500U processor operating at 2.00 GHz.
Example 1
Consider the TFBE (1)–(3) with \(g(x)=0,\nu =1, X_l=0,\, X_r=1, T=1, \theta _1(t)=t^2, \theta _2(t)=et^2\) and \(f(x,t)=\frac{2}{\varGamma (3-\alpha )}t^{2-\alpha }e^x+t^4e^{2x}-\nu t^2e^x.\) The true solution is \(u(x,t)=t^2e^x\).
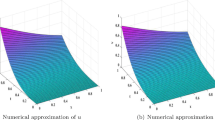
We apply the proposed method (37) to solve this problem for several values of mesh points M and N. First, we compute the rate of convergence of presented technique in temporal direction. For the purpose, we calculate the errors by varying N and fixing space step length \(\varDelta x\). Table 2 gives the \(L_{\infty }\) errors with different values of N when \(\alpha = 0.1\), 0.5, 0.9 and \(\varDelta x=0.01.\) One can observe in Table 2 that the present scheme is of order two in time. Next, to find the OOC of proposed scheme in spatial direction, we fix \(\varDelta t\) and find the \(L_{\infty }\) norm errors for various values of M. Table 3 shows the \(L_{\infty }\) errors with various values of M when \(\alpha = 0.5\), 0.9 and \(\varDelta t=0.00005.\) Table 3 shows that the spatial accuracy of the proposed method is of fourth order. The OOC in Tables 2 and 3 is in good agreement with the theoretical OOC provided in Theorem 6. The CPU time of present numerical scheme is also provided in Tables 2 and 3, which confirms that our scheme is computationally efficient. The numerical solutions at various time levels \(t = 0.5,\; 0.75\) and 1 are shown in Fig. 1. Figures 2 and 3 show the 3D surface plots of the numerical and exact solutions when \(\alpha =0.5\). These figures indicate that the presented scheme approximates the exact solution of TFBE accurately.

Numerical solution of Example 1 for \(\alpha = 0.5\) and \(T = 0.5, 0.75\) and 1

3D graph of numerical solution of Example 1 with \(N=M= 50\)

3D graph of exact solution of Example 1 with \(N= M = 50\)
Example 2
Consider the TFBE (1)–(3) with \(g(x)=0, \ \nu =1, X_l=0,\, X_r=1, T=1, \theta _1(t)=t^2, \theta _2(t)=-t^2\) and \(f(x,t)=\frac{2t^{2-\alpha }\cos (\pi x)}{\varGamma (3-\alpha )}-\pi t^4\cos (\pi x)\sin (\pi x)+\nu \pi ^2t^2\cos (\pi x).\) The exact solution is \(u(x,t)=t^2\cos (\pi x)\).

Numerical solution of Example 2 for \(\alpha = 0.5\) and \(T = 0.5\), 0.75 and 1
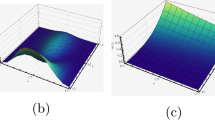
We apply present method (37) to solve this problem for several values of mesh points M and N. The \(L_{\infty }\) errors when \(\alpha = 0.1\), 0.5, 0.9 and \(\varDelta x=0.01\) for various values of N are presented in Table 4. One can observe in Table 4 that the present scheme is of order two in time. The \(L_{\infty }\) errors when \(\alpha = 0.5\), 0.9 and \(\varDelta t=0.0001\) for different values of M are reported in Table 5, which shows that our method has \(O(\varDelta x^{4})\) convergence rate in space. This confirms that the experimental results are consistent with the theoretical estimates. The CPU timings of the scheme are also recorded, which confirm the fastness of our scheme. The numerical solutions at various time levels \(t = 0.5,\; 0.75\) and 1 are plotted in Fig. 4. Figures 5 and 6 show the 3D surface plots of the numerical and exact solutions when \(\alpha =0.5\). These figures confirm that the presented scheme approximates the exact solution of TFBE accurately.

3D graph of numerical solution of Example 2 with \(N = M = 50\)

3D graph of exact solution of Example 2 with \(N = M = 50\)
Example 3
In this example, we consider the TFBE (1) with IC (El-Danaf and Hadhoud 2012):
and BCs
with \(f(x,t)=0\). The exact solution of this problem for \(\alpha =1\) is
We compare the results of our method with those obtained by the approach presented in El-Danaf and Hadhoud (2012). This comparison is given in Table 6 where we used \(\mu _0=0.3\), \(\sigma _0=0.4\), \(\nu =0.1\), \(\lambda =0.8\) and \(\varDelta x=\varDelta t =0.01\). We can observe from this Table that our method provides much more accurate solution than the method in El-Danaf and Hadhoud (2012).
Example 4
Consider the TFBE (1)–(3) with \(g(x)=0, \ \nu =1, X_l=0,\, X_r=1, T=1, \theta _1(t)=0, \theta _2(t)=0\) and \(f(x,t)=\frac{2t^{2-\alpha }\sin (2\pi x)}{\varGamma (3-\alpha )}+2\pi t^4\sin (2\pi x)\cos (2\pi x)+4\nu \pi ^2t^2\sin (2\pi x).\) The exact solution is \(u(x,t)=t^2\sin (2\pi x)\).

Numerical solution of Example 4 for \(\alpha = 0.5\) and \(T = 0.5, 0.75\) and 1

3D graph of numerical solution of Example 4 with \(N = M = 50\)

3D graph of exact solution of Example 4 with \(N = M = 50\)
We apply present method (37) to solve this problem for several values of grid points M and N. The \(L_{\infty }\) errors when \(\alpha = 0.1\), 0.5, 0.9 and \(\varDelta x=0.005\) for various values of N are presented in Table 7. We can observe from Table 7 that the proposed method is of order two in time. The \(L_{\infty }\) errors for various values of M when \(\alpha = 0.5\), 0.9 and \(\varDelta t=0.001\) are presented in Table 8. One can observe in Table 8 that the present scheme has fourth-order accuracy in spatial direction. Tables 7 and 8 confirm that the numerical results are in good agreement with the theoretical results. Tables 7 and 8 also provide the CPU timings of the method which confirm the fastness of the proposed scheme. The numerical solutions for \(t = 0.5,\; 0.75\) and 1 are shown in Fig. 7. Figures 8 and 9 show the 3D surface plots of the numerical and exact solutions when \(\alpha =0.5\). These figures indicate that the presented scheme approximates the exact solution of TFBE accurately.
5 Conclusions
An efficient high-order computational technique has been described and demonstrated for nonlinear TFBE. This technique is based on the \(L2-1_{\sigma }\) formula which is employed for the approximation of the Caputo derivative of fractional order. We approximate the space derivatives using the collocation technique with the aid of QBS basis functions. The resulting method is unconditionally stable and exhibits fourth-order convergence in the spatial direction and second-order convergence in the temporal direction, as demonstrated by the convergence analysis. The experimental OOC confirms the theoretical results proved in Theorem 6. The experimental results indicates that the proposed method is highly accurate and efficient in dealing with the nonlinear TFBE. We have compared our results with those obtained by the method based on cubic parametric spline functions (El-Danaf and Hadhoud 2012). Comparison confirmed that the present method is more accurate than the method proposed in El-Danaf and Hadhoud (2012). The computational efficiency of the method is confirmed by the CPU time provided in the tables.
Data Availability
The manuscript has no associated data.
References
Adomian G (1995) The diffusion-Brusselator equation. Comput Math Appl 29:1–3
Alikhanov AA (2015) A new difference scheme for the time fractional diffusion equation. J Comput Phys 280:424–438
Bagley RL, Torvik PJ (1984) On the appearance of the fractional derivative in the behavior of real materials. J Appl Mech 51:294–298
Burgers JM (1948) A mathematical model illustrating the theory of turbulence. Adv Appl Mech 1:171–199
Chen L, Lü S, Xu T (2021) Fourier spectral approximation for time fractional Burgers equation with nonsmooth solutions. Appl Numer Math 169:164–178
De Boor C (1978) A practical guide to splines. Springer, Berlin
Debtnath L (1997) Nonlinear partial differential equations for scientist and engineers. Birkhauser, Boston
El-Danaf TS, Hadhoud AR (2012) Parametric spline functions for the solution of the one time fractional Burgers’ equation. Appl Math Model 36:4557–4564
Giona M, Cerbelli S, Roman HE (1992) Fractional diffusion equation and relaxation in complex viscoelastic materials. Phys A 191:449–453
Guesmia A, Daili N (2010) About the existence and uniqueness of solution to fractional burgers equation. Acta Univ Apul Math Inform 21:161–170
Gyöngy I (1998) Existence and uniqueness results for semilinear stochastic partial differential equations. Stoch Proc Appl 73:271–299
Hassanien IA, Salama AA, Hosham HA (2005) Fourth-order finite difference method for solving Burgers equation. Appl Math Comput 170:781–800
Inc M (2008) The approximate and exact solutions of the space- and time-fractional burgers’ equation with initial conditions by variational iteration method. J Math Anal Appl 345:476–484
Kolkovska ET (2005) Existence and regularity of solutions to a stochastic Burgers-type equation. Braz J Probab Stat 19(2):139–154
Kutluay S, Esen A, Dag I (2004) Numerical solutions of the Burgers equation by the least-squares quadratic B-spline finite element method. J Comput Appl Math 167:21–33
Liu JC, Hou GL (2011) Numerical solutions of the space- and time-fractional coupled burgers equations by generalized differential transform method. Appl Math Comput 217:7001–7008
Logan JD (1994) An introduction to nonlinear partial differential equations. Wiley-Interscience, New York
Mainardi F (1997) Fractals and fractional calculus continuum mechanics. Springer, New York, pp 291–348
Majeed A, Kamran M, Iqbal MK, Baleanu D (2020) Solving time fractional Burgers’ and Fisher’s equations using cubic B-spline approximation method. Adv Differ Equ 2020:1–15
Podlubny I (1999) Fractional differential equations. Academic, New York
Prenter PM (1975) Splines and variational methods. Wiley, New York
Ramadan MA, El-Danaf TS, Alaal FEA (2005) A numerical solution of the Burgers equation using septic B-splines. Chaos Solitons Fractals 26:1249–1258
Roul P (2020) A high accuracy numerical method and its convergence for time-fractional Black–Scholes equation governing European options. Appl Numer Math 151:472–493
Roul P, Goura VMKP (2020) A high order numerical scheme for solving a class of non-homogeneous time-fractional reaction diffusion equation. Numer Methods Partial Differ Equ. https://doi.org/10.1002/num.22594
Roul P, Rohil V (2021) A high order numerical technique and its analysis for nonlinear generalized Fisher’s equation. J Comput Appl Math. https://doi.org/10.1016/j.cam.2021.114047
Roul P, Prasad Goura VMK, Agarwal R (2019) A new high order numerical approach for a class of nonlinear derivative dependent singular boundary value problems. Appl Numer Math 145:315–341
Roul P, Madduri H, Obaidurrahman K (2019) An implicit finite difference method for solving the corrected fractional neutron point kinetics equations. Prog Nucl Energy 114:234–247
Roul P, Goura VMKP, Madduri H, Obaidurrahman K (2019) Design and stability analysis of an implicit non-standard finite difference scheme for fractional neutron point kinetic equation. Appl Numer Math 145:201–226
Roul P, Rohil V, Espinosa-Paredes G, Obaidurrahman K (2023) An efficient computational technique for solving a fractional-order model describing dynamics of neutron flux in a nuclear reactor. Ann Nucl Energy 185:109733
Rubin, SG Graves RA (1975) A cubic spline approximation for problems in fluid mechanic. Nasa TR R-436, Washington
Saka B, Dag I (2008) A numerical study of the Burgers equation. J Franklin Inst 345:328–348
Shafiq M, Abbas M, Abdullah FA, Majeed A, Abdeljawad T, Alqudah MA (2022) Numerical solutions of time fractional Burgers’ equation involving Atangana–Baleanu derivative via cubic B-spline functions. Results Phys 34:105244
Veeresha P, Prakasha DG, Kumar S (2020) A fractional model for propagation of classical optical solitons by using nonsingular derivative. Math Method Appl Sci. https://doi.org/10.1002/mma.6335
Vieru D, Fetecau C, Ali Shah N, Chung JD (2021) Numerical approaches of the generalized time-fractional Burgers’ equation with time-variable coefficients. J Funct Spaces 2021:1–14
Wang J, Warnecke G (2003) Existence and uniqueness of solutions for a non-uniformly parabolic equation. J Differ Equ 189:1–16
Yaseen M, Abbas M (2020) An efficient computational technique based on cubic trigonometric B-splines for time fractional Burgers’ equation. Int J Comput Math 97(3):725–738
Acknowledgements
The authors are very grateful to NBHM, DAE for providing financial support under the project no. 02011/7/2023/NBHM (RP)/R &D II/2877.
Author information
Authors and Affiliations
Contributions
PR conceptualization, formal analysis, resources, writing—original draft, investigation, supervision. VR writing—original draft, software.
Corresponding author
Ethics declarations
Conflict of interest
The author declares that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Roul, P., Rohil, V. A high-accuracy computational technique based on \(L2-1_{\sigma }\) and B-spline schemes for solving the nonlinear time-fractional Burgers’ equation. Soft Comput 28, 6153–6169 (2024). https://doi.org/10.1007/s00500-023-09413-0
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-023-09413-0