
Abstract
The non-degeneracy is one of the conditions to check for bifurcation analysis. Therefore, we need to compute the critical normal form coefficients to verify the non-degeneracy of the listed bifurcations. Using the critical normal form coefficients method to examine the bifurcation analysis makes it avoid calculating the central manifold and converting the linear part of the map into Jordan form. This is one of the most effective methods in the bifurcation analysis that has not received much attention so far. So in this article, we turn our attention to this method. In this study, the dynamic behaviors of the discrete Bonhoeffer–van der Pol (BVP) model are discussed. It is shown that the BVP model undergoes codimension one (codim-1) bifurcations such as pitchfork, fold, flip (period doubling) and Neimark–Sacker. Besides, codimension two (codim-2) bifurcations including resonance 1:2, 1:3, 1:4 and Chenciner have been achieved. For each bifurcation, normal form coefficients along with its scenario are investigated thoroughly. Bifurcation curves of the fixed points are drawn with the aid of numerical continuation techniques. Besides, a numerical continuation not only confirms our analytical results but also reveals richer dynamics of the model especially in the higher iteration.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Neurons are the basic elements in the nervous system; they depend on each other and are responsible for stimulating and directing emotions. There are approximately \( 10^{11}\) neurons in the human’s brain and \(10^9\) in spinal nerve, and each one has nearly \(10^4\) synaptic connections with other neurons. Every neuron consists of Axon, Myelin, and Dendrite as its main components. Action potential or the firing of the neuron sourcing from abrupt changes of the cell’s electrical potential has a prominent role in the connection between the neurons which gets to the other cells through Axon and synaptic relations after production.
The abrupt changes of cell’s membrane usually take place due to ions displacement including sodium \((\hbox {Na}^{+}) \), calcium \( (\hbox {Ca}^{2+}) \) and potassium \((\hbox {K}^{+})\). These ions are present in the neuron’s cell membrane, and through sodium, calcium and potassium valves called voltage gates, they are allowed to enter and exit the cell membrane. The first neural model, Hodgkin–Huxley (H–H), was introduced in 1952 by the pioneers named Hodgkin and Huxley. This model is based on the electrophysiological experiments conducted on the Axon of a squid-like creature called the squid giant. See Izhikevich (2000a, 2000b), Wang and Wang (2011), Guchenhermer and Oliva (2002), Hodgkin and Huxley (1952) and their references.
The BVP model was developed by FitzHugh and Nagumo by simplifying the Hodgkin–Huxley (H–H) model in 1961, see FitzHugh (1961), Nagumo et al. (1962). They reduced the four-dimensional H–H model to a two-dimensional one which might be considered as a reasonable extension of van der Pol equation because the BVP model can be examined by a circuitry Rocsoreanu et al. (2000). Besides, this equation can be achieved using a nonlinear conductor in a circuitry. Nowadays, BVP equation has turned into a well-known nonlinear oscillator.
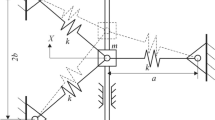
A full investigation from the BVP model with the nonlinearity of cubic order was carried out by Bautin (1975). In Kitajima et al. (1998) the bifurcation diagrams of this system were studied and a great diversity of nonlinear phenomena was observed compared to the van der Pol equation. The applications of the BVP equation with the mentioned background could be observed in Hoque and Kawakami (1995), Papy and Kawakami (1996), Tsumoto et al. (1999). More bifurcations of the model can be found in Rocsoreanu et al. (2001), Flores (1991), Freitas and Rocha (2001), Jones (1984), Jing et al. (2002). Figure 1 shows the main BVP model, and the circuit equations are as follows:
We presume that g(V) is an odd function and E is skipped. Therefore, the above equation is symmetry under \((V,I)\rightarrow (-V,-I)\) permutation. Thus, E as a voltage source applies to eliminate the symmetric feature of the model.

BVP oscillator
In this paper, nonlinear conductance is considered as
and the model turns into a discrete one by applying the Euler scheme. Then, we examine the dynamics of the discrete-time BVP oscillation equation and we have:
where
In Wang and Guangqing (2010), the authors propose the following discrete-time BVP model:
where \( \epsilon \) is the integral step size and \( k,\gamma , \epsilon \) are positive constants and \( \beta \in {\mathbb {R}}\).
The existence and stability of the fixed points of model (3) as well as some bifurcations of it, through the numerical method, have been investigated in Wang and Guangqing (2010). In this paper, we study all of the codim-1 bifurcation analysis such as pitchfork, fold, flip (period doubling) and Neimark–Sacker, analytically by regarding k as bifurcation parameter; also, all of the codim-2 bifurcations of the system are extracted by regarding \( \epsilon \) and k as free parameters. It will be shown that the system undergoes some bifurcations like Chenciner, resonance 1:2, resonance 1:3 and resonance 1:4 bifurcations under change of these two parameters. Moreover, all the bifurcation curves for the model will be drawn with the aid of numerical continuation methods. The numerical results prove the analytic results and reveal more complicated dynamic of the system.
The bifurcation theory allows us to identify and predict changes or metamorphoses in the dynamics of a system. Hence, bifurcation theory is one of the important branches of dynamic systems. Bifurcations in a dynamic model are examined from both analytical and numerical aspects. Many methods have proposed to study the bifurcations in each of these two aspects, among which some methods are more efficient than others. One of the most effective analytical methods in the bifurcation theory is the computation of the critical normal form coefficients. This method is more prone to be noticed in many dynamical systems. In this paper, the computation of the normal form coefficients is done analytically which is also confirmed numerically using MatContM; for more details, see Kuznetsov and Meijer (2005), Govaerts et al. (2007). Furthermore, this paper provides an efficient analytical and numerical method for extensive implementation on different discrete-time models.
The paper structure is organized as follows: In Sect. 2, the basic assumptions are introduced and the existence of the fixed points of (3) is presented. In Sect. 3, all of the codim-1 bifurcations of (3) by considering k as a free parameter are investigated. In Sect. 4, the codim-2 bifurcations are discussed by considering \( \epsilon \) and k as free parameters. In Sect. 5, the numerical continuations are provided. Finally, this paper ends with some concluding remarks.
2 Existence of the fixed points and bifurcation analysis
The fixed points \((x_{*},y_{*})\) of (3), are satisfied in the following equation:
The conditions of asymptotic stability of the fixed point \(E_{*}= (x_{*},\frac{\beta +x_{*}}{k})\) of (3) can be found in Wang and Guangqing (2010).
First, let us consider model (3) as follows:
where \(\xi =(x,y)^T\) and \(\vartheta =(\epsilon ,\gamma ,k,\beta )^T\). The Jacobian matrix of the map (3) is given by:
Similar to Kuznetsov and Meijer (2005), the second and third multi-linear forms of (3) can be expressed as
where
Then, the multi-linear forms corresponding to the model (3) are given by
Since \({\mathcal {N}}\) is smooth enough, it can be written as follows:
3 Codim-1 bifurcations
In this section, we consider \(\gamma , \beta , \epsilon \) as fixed parameters and k as a free parameter. We have the following theorems for local codim-1 bifurcations.
Theorem 1
\(E_{*}\) experiences a non-degenerate limit point bifurcation, at \(k=-{\frac{1}{\gamma \, \left( {\gamma }^{2}{{x_{*}}}^{2}-1 \right) }}\), provided
Proof
There is a fixed point of (3) with multiplier \(+1\) if
Clearly
satisfies the algebraic system (5). The Jacobian matrix at the curve \(t_{LP}\) has a simple multiplier \(\lambda _1=+1\) and the other multipliers are not on the unit circle provided
The center manifold at \(k=-{\frac{1}{\gamma \, \left( {\gamma }^{2}{{x_{*}}}^{2}-1 \right) }}\) can be considered as
where
and
The restriction of the map (3) on (7) has the following form:
The center manifold invariance requires
The following linear system is obtained by collecting the \(\nu ^2-\)terms in (8):
where \(\vartheta _{*}=(\epsilon ,\gamma ,-{\frac{1}{\gamma \, \left( {\gamma }^{2}{{x_{*}}}^{2}-1 \right) }},\beta )^T\).
The solvability condition (9) is as follows:
therefore,
So the fold bifurcation is non-degenerate provided \(x_{*}\ne 0\). \(\square \)
Theorem 2
On the curve
there is a pitchfork bifurcation provided \( \epsilon \ne \frac{2\gamma }{1-\gamma ^{2}}, \gamma \ne 1 \).
Proof
Clearly the map (3) has a fixed point with multiplier \(+1\) on the curve \(t_{Pitch}\). Since \(a_{LP}=0\), a pitchfork bifurcation is expected on this curve.
Let us consider the center manifold at \(k=\frac{1}{\gamma }\) as follows:
where
and
The map (3) can be restricted to (10) as follows:
Due to the center manifold properties the following equation can be obtained:
The following linear systems are obtained by collecting the power of \(\iota \) terms up to the cubic order:
where \(\vartheta _{*}=(\epsilon ,\gamma ,k,\beta )^T=(\epsilon ,\gamma ,\frac{1}{\gamma },\beta )^T\).
Since
the system (12) is solvable and \(m_2=\left( {\begin{matrix} 0\\ 0 \end{matrix}}\right) \) is its solution obtained by the bordering technique. The system (13) is solvable if
therefore,
\(\square \)
Theorem 3
There is a non-degenerate period doubling bifurcation of \(E_{*}\) at \(k={\frac{2\,\epsilon \,{\gamma }^{3}{{x_{*}}}^{2}-{\epsilon }^{2}-2\, \epsilon \,\gamma -4}{\epsilon \, \left( \epsilon \,{\gamma }^{3}{{x_{*}}} ^{2}-\epsilon \,\gamma -2 \right) }}\), provided
Proof
There is a fixed point with multiplier \(+1\) for the map (3) if
Clearly, the curve
satisfies the system (14). Let us consider
as the center manifold corresponding to the map (3) at \(k={\frac{2\,\epsilon \,{\gamma }^{3}{{x_{*}}}^{2}-{\epsilon }^{2}-2\, \epsilon \,\gamma -4}{\epsilon \, \left( \epsilon \,{\gamma }^{3}{{x_{*}}} ^{2}-\epsilon \,\gamma -2 \right) }}\), where
in which
The map (3) can be restricted to (15) as follows:
the center manifold property implies that
Collecting the power of \( \phi \) terms up to the third order gives
where \(\vartheta _{*}=\left( \epsilon ,\gamma ,{\frac{2\,\epsilon \,{\gamma }^{3}{{x_{*}}}^{2}-{\epsilon }^{2}-2\, \epsilon \,\gamma -4}{\epsilon \, \left( \epsilon \,{\gamma }^{3}{{x_{*}}} ^{2}-\epsilon \,\gamma -2 \right) }},\beta \right) \).
The system (17) is non-singular and
is its solution. The singular system (18) is solvable provided
Thus,
where
The flip bifurcation is non-degenerate provided \(b_{PD}\ne 0\). If \(b_{PD}\) is positive, the bifurcation is supercritical and the double period cycle is stable. When \(b_{PD}<0\), it is subcritical and unstable. \(\square \)
Theorem 4
On the curve
there is a non-degenerate Neimark–Sacker bifurcation.
Proof
The map (3) has a fixed point with a pair complex multiplier on the unit circle if
where \(\odot \) is the bi-alternate matrix product. Clearly the curve \(t_{NS}\) satisfies the algebraic system (19).
Along the curve \(t_{NS}\) there is a pair of complex multipliers on the unit circle
that satisfy on the non-resonance conditions, where
The center manifold at \(k=-{\frac{-{\gamma }^{3}{{x_{*}}}^{2}+\epsilon +\gamma }{\epsilon \,{ \gamma }^{3}{{x_{*}}}^{2}-\epsilon \,\gamma -1}}\), can be considered as
where
and
The restriction of the map (3) on (20), at the critical value k has the form
where \(d_{NS}\) is a complex number. Given the properties of the center manifold, the following equation is obtained
The following equations can be found by collecting the power of \(\varsigma \) terms up to the third:
where \(,\vartheta _{*}=\left( \epsilon ,\gamma ,-{\frac{-{\gamma }^{3}{{x_{*}}}^{2}+\epsilon +\gamma }{\epsilon \,{ \gamma }^{3}{{x_{*}}}^{2}-\epsilon \,\gamma -1}},\beta \right) \). Equations (23)–(25) have a unique solution because 1, \(e^{2i\theta _0}\) and \(e^{3i\theta _0}\) are not eigenvalues of \({\mathcal {J}}\). To avoid the complexity of the computation, we consider
The solutions of (23)–(25) can be calculated as
The system (26) is singular; therefore, it is solvable if
So we conclude that
The first Lyapunov coefficient of the Neimark–Sacker bifurcation is
Since \(c_{NS}<0\), the Neimark–Sacker bifurcation is supercritical and the closed invariant curve is stable. \(\square \)
4 Codim-2 bifurcations
In this section we consider \(\gamma , \beta \) as fixed parameters and k and \(\epsilon \) as free parameters. The system (3) has the following local codim-2 bifurcations.
Theorem 5
There is a non-degenerate 1:2 resonance bifurcation of the fixed point \(E_{*}\) at the parameter values \(k={\gamma }^{3}{{x_{*}}}^{2}-\gamma +2\) and \(\epsilon =2\, ( {\gamma }^{3}{{x_{*}}}^{2}-\gamma +1 ) ^{-1}\).
Proof
The map (3) has a fixed point with two multipliers \(-1\) if
where \(\kappa \) is the real part of the critical multipliers \(e^{\pm i\theta _0}\) along the Neimark–Sacker curve. The exact solution of (27) is
The center manifold of the map (3) at \(k ={\gamma }^{3}{{x_{*}}}^{2}-\gamma +2\) and \(\epsilon =2\, \left( {\gamma }^{3}{{x_{*}}}^{2}-\gamma +1 \right) ^{-1}\) can be considered as follows:
where
The map (3) can be restricted to (28) as follows:
Given the invariance property of the central manifold, we concluded that
The following equations are obtained from (30):
The cubic part of (30) gives
where \(\vartheta _{*}=\left( 2\, \left( {\gamma }^{3}{{x_{*}}}^{2}-\gamma +1 \right) ^{-1},\gamma ,{\gamma }^{3}{{x_{*}}}^{2}-\gamma +2,\beta \right) \). The solvability condition of the singular system (31) implies that
thus,
The singular system (32) has an unique solution provided
Since
the third-order coefficient of (29) can be calculated as
The non-degeneracy conditions of this bifurcation are \(C_{1}=4C_{R_2}\ne 0\) and \(D_{1}=-2D_{R_2}-6C_{R_2}\ne 0\). The sign of \(C_{1}\) determines the type of the critical point. The bifurcation scenario is indicated by the coefficient \(D_{1}\). \(\square \)
Theorem 6
There is a non-degenerate 1 : 3 resonance bifurcation of the fixed point \(E_{*}\) at
where
Proof
The map (3) has a fixed point with a pair of complex conjugate multipliers \(e^{\pm i \frac{2\pi }{3}}\) if
where \(\kappa =\cos (\theta _0)\) along the Neimark–Sacker curve. The exact solution of (35) is
Let us consider
as the center manifold of (3) at \(k=-{\frac{-{{\gamma }}^{6}{{x_{*}}}^{4}+2\,{{\gamma }}^{4}{{ x_{*}}}^{2}+{{\gamma }}^{3}u\,{{x_{*}}}^{2}-{{\gamma }}^{2}- {\gamma }\,u+2}{{{\gamma }}^{3}{{x_{*}}}^{2}-{\gamma }+u}}\) and \(\epsilon =1/2\,{\frac{{{\gamma }}^{3}{{x_{*}}}^{2}-{\gamma }+u}{{{\gamma }}^{6}{{x_{*}}}^{4}-2\,{{\gamma }}^{4}{{x_{*}}}^{2}+ {{\gamma }}^{2}-1}}\), where
and
The restriction of the map (3) on (36) has the form
The invariance property of the center manifold cause to
where \(\vartheta _{*}=\left( 1/2\,{\frac{{{\gamma }}^{3}{{x_{*}}}^{2}-{\gamma }+u}{{{\gamma }}^{6}{{x_{*}}}^{4}-2\,{{\gamma }}^{4}{{x_{*}}}^{2}+ {{\gamma }}^{2}-1}}),\gamma ,\right. \left. -{\frac{-{{\gamma }}^{6}{{x_{*}}}^{4}+2\,{{\gamma }}^{4}{{ x_{*}}}^{2}+{{\gamma }}^{3}u\,{{x_{*}}}^{2}-{{\gamma }}^{2}- {\gamma }\,u+2}{{{\gamma }}^{3}{{x_{*}}}^{2}-{\gamma }+u}},\beta \right) \). The quadratic terms of (37) gives
Applying the Fredholm condition to singular system (40), we have
where
The unique solution of the singular system is obtained as follows:
where
The \(\zeta ^2{\bar{\zeta }}-\)terms in (37) gives:
The singular system (41) can be solved if
therefore, \(C_{R_3}\) can be obtained as follows:
where \( C_{1R_3}(\gamma ,x_{*})=\zeta _{1}+\zeta _{2}+\zeta _{3}+ \zeta _{4}+\zeta _{5}+\zeta _{6}+\zeta _{7}+\zeta _{8}+\zeta _{9}\), and
The stability of the bifurcating closed invariant curve is determined by
\(\square \)
Theorem 7
There is a non-degenerate 1 : 4 resonance bifurcation of the fixed point \(E_{*}\) at
where
Proof
The map (3) has a fixed point with a pair of complex conjugate multipliers \(e^{\pm i \frac{\pi }{2}}\) if
where \(\kappa =\cos (\theta _0)\) along the Neimark–Sacker curve. The exact solution of (35) is
Suppose that
as the center manifold of (3) at the
where

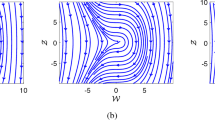
Phase portraits of (3) for \( \gamma =1.32, \beta =1, \epsilon =0.7\). a Attractor before a Neimark–Sacker bifurcation for \( k=2.48 \). b Neimark–Sacker bifurcation for \( k=2.514 \). c The invariant closed curve created after Neimark–Sacker bifurcation for \(k=2.9 \). d The breakdown of the closed invariant curve for \( k=3.1 \)
and
The restriction of the map (3) to (43) has the form
The invariance property of the center manifold cause to
where \(\vartheta _{*}=\left( {\frac{{{\gamma }}^{3}{{x_{*}}}^{2}-{\gamma }+u}{{{\gamma } }^{6}{{x_{*}}}^{4}-2\,{{\gamma }}^{4}{{x_{*}}}^{2}+{{\gamma }} ^{2}-1}},\gamma ,\right. \left. {\frac{{{\gamma }}^{6}{{x_{*}}}^{4}-2\,{{\gamma }}^{4}{{x_{*} }}^{2}-u\,{{\gamma }}^{3}{{x_{*}}}^{2}+{{\gamma }}^{2}+u\,{\gamma }-2}{{{\gamma }}^{3}{{x_{*}}}^{2}-{\gamma }+u}},\beta \right) \). The quadratic terms of (45) gives

a Continuation of fixed point in (k, x)-space. The Neimark–Sacker (ns) and period-doubling (pd) points. b pd curve of the first iterate consists of r2 point, rooted at the pd point
where
Collecting the resonance terms of (45), we get
The solvability conditions of the singular systems (46) and (47) are as follows:
Thus,
where

Neimark–Sacker bifurcation curve consists of resonance 1:2 (r2), resonance 1:3 (r3), resonance 1:4 (r4) and Chenciner (ch) bifurcation

Neimark–Sacker bifurcation curves of the first and third iterate
The bifurcation scenario near the \(R_4\) point is determined by
\(\square \)
5 Numerical continuation
In this section, we perform a continuation method in order to numerically illustrate the dynamical behavior of system (3) by using the matlab package matcontm.
We consider two cases:
Case 1: We fix \( \gamma =1.32, \beta =1, \epsilon =0.7 \) and then vary k as a free parameter. Phase portraits of system (3) for different values of k are depicted in Fig. 2. When k varies as a free parameter, the matcontm report is as follows:

Continuation of fixed point in (k, x)-space. The fold point (lp), Neimark–Sacker point (ns) and period-doubling (pd) point

By Theorem 3, the fixed point \(E_{*}\) has period-doubling bifurcations in which period-doubling point is detected as a pd. By Theorem 4, the fixed point \(E_{*}\) has Neimark–Sacker bifurcations and Neimark–Sacker detected as ns. See Fig. 3a.
Bifurcation curves for two control parameters k and \(\epsilon \) and keeping \(\gamma =1.32, \beta =1 \) fixed are presented in Figs. 3b and 4. pd curve of the first iterate consisting of r2 point is presented in Fig. 3b, and the matcontm report is as follows:

Continuation of the Neimark–Sacker curve is presented below, and the ns curve is plotted in Fig. 4:


Neimark–Sacker bifurcation curve consists of resonance 1:2 (r2), resonance 1:3 (r3) points

Phase portraits of (3) for \( k=1.9, \beta =0.5, \epsilon =0.88\). a Attractor for \( \gamma =2.2 \). b resonance 1:3 bifurcation for \(\gamma =2.31 \). c Chaotic attractor for \(\gamma =2.33\)
By selecting r3 point to start the continuation Neimark–Sacker bifurcation curves of the third iterate are depicted in Fig. 5 and matcontm report is as follows:

Case 2: We fix \( \gamma =2.2, \beta =.5, \epsilon =0.7 \) and then vary k as a free parameter, the matcontm report is

By Theorem 1, the fixed point \(E_{*}\) has fold bifurcations in which fold point is detected as a lp. By Theorem 3, the fixed point \(E_{*}\) has period-doubling bifurcation in which period-doubling point is detected as a pd, and by Theorem 4, the fixed point \(E_{*}\) has Neimark–Sacker bifurcations detected as ns. see Fig. 6.
Bifurcation curves for two control parameters k and \(\epsilon \) are presented in Fig. 7, and the matcontm report is as follows:

Given that \(R3=(0.588187 0.571752 1.903248 0.885721 -0.500000)\) phase portraits of system (3) for \( k=1.9, \beta =0.5, \epsilon =0.88 \) and different values of \( \gamma \) are depicted in Fig. 8. Curve of “Neutral Saddle” of the third iterate is presented in Fig. 9.
6 Conclusion
In this work, we studied the BVP discrete model introduced in [14]. The bifurcation conditions of this model along with the computation of normal form coefficients are done through the reduction of the model to the center manifold. Then, with the aid of the numerical continuation method, all of the bifurcation curves of the model was drawn and the numerical results confirmed our analysis results.

Curve of “Neutral Saddle” of the third iterate
References
Bautin AN (1975) Qualitative investigation of a particular nonlinear system. J Appl Math Mech 39:606–615
FitzHugh R (1961) Impulses and physiological states in theoretical models of nerve membrane. Biophys J 1:445–466
Flores G (1991) Stability analysis for the slow traveling pulse of the FitzHugh–Nagumo systems. SIAM J Math Anal 22:392–399
Freitas P, Rocha C (2001) Lyapunov functional and stability for FitzHugh–Nagumo systems. J Differ Equ 169:208–227
Govaerts W, Khoshsiar R, Kuznetsov YA, Meijer H (2007) Numerical methods for two parameter local bifurcation analysis of maps. SIAM J Sci Comput 29:2644–2667
Guchenhermer J, Oliva RA (2002) Chaos in the Hodgin–Huxley model. SIAM J Appl Dyn Syst 1:105–114
Hodgkin AL, Huxley AF (1952) Currents carried by sodium and potassium ions through the membrane of the giant axon of Loligo. J Physiol 116:449–472
Hoque M, Kawakami H (1995) Resistively coupled oscillators with hybrid connection. IEICE Trans Fund 78:1253–1256
Izhikevich EM (2000) Neural excitability, spiking and bursting. Int J Bifurcat Chaos 10:1171–1266
Izhikevich EM (2000) Subcritical elliptic bursting of bautin type. SIAM J Appl Math 60:503–535
Jing ZJ, Jia ZY, Wang RQ (2002) Chaos behavior in the discrete BVP oscillator. Int J Bifurcat Chaos 12:619–627
Jones CKRT (1984) Stability of travelling wave solution of the FitzHugh–Nagumo system. Trans Am Math Soc 286:431–469
Kitajima H, Katsuta Y, Kawakami H (1998) Bifurcations of periodic solutions in a coupled oscillator with voltage ports. IEICE Trans Fund 81:476–482
Kuznetsov YA, Meijer H (2005) Numerical normal forms for codim-2 bifurcations of fixed points with at most two critical eigenvalues. SIAM J Sci Comput 26:1932–1954
Nagumo J, Arimoto S, Yoshizawa S (1962) An active pulse transmission line simulating nerve axon. Proc IRE 50:2061–2070
Papy O, Kawakami H (1996) Symmetry breaking and recovering in a system of n hybridly coupled oscillators. IEICE Trans 79:1581–1586
Rocsoreanu C, Georgescu A, Giurgiteanu N (2000) The FitzHugh–Nagumo model bifurcation and dynamics, mathematical modeling: theory and applications. Kluwer Academic Publishers, Dordrecht
Rocsoreanu C, Giurgiteanu N, Georgescu A (2001) Connections between saddles for the FitzHugh–Nagumo system. Int J Bifurcat Chaos 11:533–540
Tsumoto K, Yoshinaga T, Kawakami H (1999) Bifurcation of a modified BVP circuit model for neurons generating rectangular waves. IEICE Trans Fund 82:1729–1736
Wang J, Guangqing F (2010) Bifurcation and chaos in discrete-time BVP oscillator. Int J Nonlinear Mech 45:608–620
Wang H, Wang Q (2011) Bursting oscillations, bifurcation and synchronization in neuronal systems. Chaos Soliton Fract 44:667–675
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest regarding the publication of this paper.
Ethical approval
This article does not contain any studies with human participants or animals performed by the authors.
Funding
This study was funded by the Shahrekord University of Iran.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Alidousti, J., Eskandari, Z., Fardi, M. et al. Codimension two bifurcations of discrete Bonhoeffer–van der Pol oscillator model. Soft Comput 25, 5261–5276 (2021). https://doi.org/10.1007/s00500-020-05524-0
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-020-05524-0