
Abstract
We study the motion of infinitesimal mass in the vicinity of the dominant primaries under the Newtonian law of gravitation in the restricted eight-body problem. The proposed problem is a particular case of n + 1-body problem studied by Kalvouridis (Astrophys. Space Sci 260: 309 325, 1999). We consider six peripheral primaries P1, P2, …, P6, each of mass m, revolve in a circular orbit of radius a with an angular velocity ω about their common center of mass. The primaries Pi (i = 1, 2, …, 6) are revolve in a way such that P1, P3, P5 and P2, P4, P6 always form equilateral triangles of side l and have a common circumcenter where the seventh more massive primary P0 of mass m0 rests. The primaries form a symmetric configuration with respect to the origin at any instant of time. This is observed that there exist 18 equilibrium points out of which four equilibrium points are on x-axis, two on y-axis and rest are in orbital plane of the primaries. All the equilibrium points lie on the concentric circles C1, C2 and C3 centered at origin and there exists exactly six equilibrium points on each circle. The equilibrium points on circle C2 are stable for the critical mass parameter β0 while the equilibrium points on circles C1 and C3 are unstable for all values of mass parameter β. The regions of motion for infinitesimal mass are also analyzed in this paper.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
In the last decades many authors have put their efforts in solving the restricted problem of more than three-bodies in different aspects. Their work is appreciable and encouraged us to develop a configuration in restricted problem of eight bodies’ to describe the motion of spacecraft in the vicinity of the dominant primaries.
The restricted three-body problem plays an important role to understand the behavior of satellite in the vicinity of two dominant primaries. This model is suitable to understand the dynamics of satellite in Earth-Moon and Sun-Earth planet system. A lot of research papers have been written in last five decades to show the significance of the equilibrium points obtained in these systems by including many parameters as oblateness of the primaries, radiation pressure, PR-drag effect, albedo effect etc. The stability of the triangular points in the elliptic restricted problem of three bodies is studied by Danby [12]. A concise solution to the restricted three-body problem in the circular as well as in the elliptical case has been found by Szebehely [41]. The restricted three-body problem under the consideration of radiation pressure has been studied by Chernikov [8]. The equilibrium points in the generalized elliptic restricted three-body problem are investigated by Choudhary [9]. Bhatnagar and Hallan [4] have studied the effect of perturbed potentials on the stability of equilibrium points in the restricted problem of three bodies. Asymptotic solutions to the restricted problem near equilateral equilibrium points have been investigated by Cid et al. [10]. Markellos et al. [31] have discussed the nonlinear stability zones around triangular equilibria in the plane circular restricted three-body problem with oblateness. Roberts [37] has examined the linear stability of the triangular equilibrium points in the elliptic restricted three-body problem. Douskos [14] has analyzed the collinear equilibrium points of Hill’s problem with radiation and oblateness and their fractal basins of attraction. Idrisi and Taqvi [18, 19] have solved the circular restricted three-body problem in terms of elliptic integrals. The restricted three-body problem under the consideration of albedo effects in circular and elliptic cases is studied by Idrisi [20], Idrisi and Ullah [21,22,23, 25, 43]. Ershkov and Leshchenko [15] have presented an approach for solving the Euler-Poisson equations of momentum near the liberation points for planets in our Solar System whose orbital plane is inclined relative to Earth's orbit. In a recent study conducted by Ershkov et al. [16], a semi-analytical approach was employed to analyze the bi-elliptic problem of four bodies and explore possible stable positioning for elements of a Dyson sphere.
The following researchers have extended the restricted three-body problem to 4-body, 5-body, 6-body and in general n-body problem: Michalodimitrakis [32] has investigated the equilibrium points, zero velocity curves and periodic orbits around the equilibrium points in the restricted four-body problem. Pacella [33] has used the equivariant Morse theory in three-dimensional n-body problem to estimate the minimal number of central configurations. In this study it is shown that the non-planar central configurations exist for n ≥ 4. Casasayas et al. [5] have considered a restricted charged four-body problem and proved the existence of infinite symmetric periodic orbits with arbitrarily large extremal period. The global solution of the n-body problem using a new ‘blowing up’ transformation is given by Qiu-Dong [36]. Roy et al. [38] have investigated some special cases of restricted four-body problems. Kalvouridis [27] has studied n + 1-body problem by arranging the peripheral primaries in equal arcs on an ideal ring with a central body of different mass is considered at the center of mass of the system. Bang et al. [3] have proved results on the existence and on linear stability of equilibrium points in the restricted N + 1 body problem. Celli [6] has studied the central configurations of four masses in detail. Baltagiannis et al. [2] have studied the existence of equilibrium points and their linear stability in the equilateral configuration of restricted four-body problem. A study of finding central configurations of the four-body problem with a dominant mass was carried out by Corbera et al. [11]. Kumari et al. [28] have plotted the equilibrium points and zero velocity surfaces in the restricted four-body problem with solar wind drag. Papadouris et al. [34] have examined the existence of equilibrium points and their linear stability in the equilateral configuration of restricted four-body problem with radiation pressure. A new perturbative method for solving the gravitational n-body problem in the general theory of relativity is given by Turyshev and Toth [42]. Marchesin [30] has considered a rhomboidal configuration of restricted five-body problem and discussed the stability of rhomboidal equilibria. Gao et al. [17] have analyzed the equilibrium points and zero velocity surfaces in the axisymmetric central configuration of restricted five-body problem. A special case of the restricted four-body problem has been investigated by Ansari [1] by treating the three primaries as a triaxial rigid body and the infinitesimal body as variable mass. An inverse problem of central configurations in the collinear five-body problem has been investigated by Davis et al. [13]. Ullah et al. [43] have studied the elliptic Sitnikov five-body problem under the consideration of radiation pressure. Idrisi and Ullah [23] have studied the existence and stability of equilibrium points in restricted six-body problem under a square configuration model. Chen and Yang [7] have examined the central configurations of five-body problem with four infinitesimal particles out of which two particles have unequal mass. Pappalarado et al. [35] have used an analytical approach based on the direct linearization of the index-three form to analyze the stability of multibody mechanical systems in the framework of Lagrangian mechanics. Ullah et al. [44] have probed the Sitnikov five-body problem with combined effects of radiation pressure and oblateness. Idrisi et al. [24] have shown the effect of perturbations in Coriolis and centrifugal forces on equilibrium points in the restricted six-body problem. The stability analysis of rhomboidal restricted six-body problem is studied by Siddique et al. [39]. The motion of infinitesimal mass around out-of-plane equilibrium points in the frame of restricted six-body problem under radiation pressure is examined by Idrisi and Ullah [26]. Siddique and Kashif [40] have explored the stable equilibrium points in the rhomboidal restricted six-body problem. The periodic solutions of circular Sitnikov restricted four-body problem using multiple scales method are analyzed by Kumari et al. [29].
In this paper, we have considered a symmetric configuration of restricted eight-body problem in which the dominant primary is located at the center of mass of the system. The paper is organized as follows: In Sect. 1, some notable researches related to the theme of the research are given. The mathematical model of the system and equations of motion of infinitesimal mass are obtained in Sect. 2. The graphical and numerical solution to equilibrium points are given in Sect. 3. In Sect. 4, the stability of equilibrium points is discussed. The regions of motion or zero velocity regions are discussed in brief in Sect. 5. In the last section, conclusions are drawn.
2 Mathematical model and equations of motion
Let six peripheral primaries P1, P2, …, P6, each of mass m, revolve in a circular orbit of radius a with an angular velocity ω about their common center of mass O. The primaries Pi (i = 1, 2, …, 6) are revolve in a way such that P1, P3, P5 and P2, P4, P6 always form equilateral triangles of side l and have a common circumcenter where the seventh more massive primary P0 of mass m0 rests (Fig. 1). It is also assumed that the mass of central primary is greater than the sum of all masses of peripheral primaries, i.e., m0 > Ʃmi, i = 1, 2, …, 6. The orbit lies in the Oxy plane of the inertial frame of reference, and has its center at the origin. According to Newton's law of gravitation, primaries attract each other and at any instant of time form a symmetric configuration with respect to the origin. Suppose that a test particle P with infinitesimal mass m′ < < 1 moves under the gravitational field of Pi (i = 0, 1,…, 6) in the same plane. The distances of P from O and Pi (i = 1, 2, …, 6) are r0 and ri (i = 1, 2, …, 6), respectively. From Fig. 1, it can be seen that the proposed configuration is possible if l = √3a where l and a are the dimensionless lengths of side of equilateral triangles and radius of circular orbit, respectively.

Configuration of restricted eight-body problem
In order to maintain the configuration of the primaries, the sum of the gravitational forces applied by P0, P2, P3, P4, P5 and P6 on P1 must be equal to the centrifugal force, i.e.,
which gives
Now, we choose the units of distance, mass and time in such a way that G = 1, m0 = 1 and ω = 1, therefore we have a = (1 + k β)1/3, β = m/m0 is the mass parameter having the range 0 < β < 1/6. Obviously, a is an increasing function in terms of β and thus as mass parameter β increases the radius of the orbit of primaries also increases (Fig. 2).

a with respect to β
2.1 Equations of motion
The equations of motion of the particle P(x, y, z) in the synodic coordinate system and dimensionless variables are given by
where the effective potential U may be written as
The integral analogous to Jacobi integral is
where v is the velocity of the particle P having infinitesimal mass m′ and c is Jacobian constant.
3 Equilibrium points in orbital plane
The equilibrium points in orbital plane are the solution of the Eqns. Ux = 0, Uy = 0 and z = 0, i.e.,
3.1 Graphical solution to equilibrium points
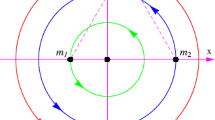
Clearly, the equilibrium points are the intersection of the curves Ux(x, y) and Uy(x, y). On plotting the corresponding curves it turns out that there are 18 equilibrium points, four of which are collinear and fourteen are non-collinear (Fig. 3). All points of equilibrium lie on the concentric circles C1, C2 and C3 centered at the origin. The equilibrium points Ei (i = 1, 2, …, 6) lie on circle C1, Ej (j = 7, 8, …, 12) on C2 and Ek (k = 13, 14, …, 18) on C3. Further, it is observed that the six equilibrium points are on the axes and twelve are in orbital plane of the primaries, i.e., E1, E4, E13 and E16 are on x-axis, E8 and E11 on y-axis and rest are in the orbital plane.

Equilibrium Points Ei (i = 1, 2, …, 18) in orbital plane for β = 0.1
3.2 Numerical solution
In this section, we locate the equilibrium points numerically on the circles C1, C2 and C3 using Newton–Raphson iteration method. Instead of finding all the equilibrium points, we focus on just one equilibrium point on each circle C1, C2 and C3, i.e., E1, E8 and E13 and the locations of other equilibrium points can be found by symmetricity. Let us assume that the coordinates of E1, E8 and E13 be (a + ρ, 0), (0, a + λ) and (a–δ, 0), respectively (Fig. 4), where ρ, λ, δ ∈ R+.

Locations of E1, E8 and E13
3.2.1 Equilibrium points on C 1
First we find the location of equilibrium point E1 and then by symmetricity we can locate other equilibrium points on C1. Let the coordinates of E1 be (a + ρ, 0). Thus, on substituting x = a + ρ and y = 0 in Eq. (3), we have f(ρ) = 0, where
The solution of Eq. (4) provides the location of E1. Since the general solution of Eq. (4) is not possible therefore we apply Newton–Raphson iteration method to solve it. On solving Eq. (4) for various values of mass parameter β, we have only one positive real root as shown in Fig. 5. It is observed that as the mass parameter β increases, ρ increases and the equilibrium point E1 moves away from the primary P1 along x-axis. The numerical positions of E1 and other equilibrium points on C1 for various values of mass parameter β are given in Table 1. The coordinates of the equilibrium points Ei(xi, yi) lying on C1 are given by:
where Λ = a + ρ is the radius of circle C1.

Zeroes of f(ρ) for different values of mass parameter β
3.2.2 Equilibrium points on C 2
Let the coordinates of E8 be (0, a + λ). Thus on substituting x = 0 and y = a + λ in Eq. (3), we have g(λ) = 0, where
On solving Eq. (5) for different values of mass parameter β by Newton–Raphson iteration method, we have location of E8. Eq. (5) possesses only one real root for 0 < β < 1/6 as shown in Fig. 6. It is found that λ increases as the mass parameter β increases and the equilibrium point E8 moves in upward direction along y-axis. The numerical positions of E8 and other equilibrium points on C2 for various values of mass parameter β are given in Table 2. The coordinates of the equilibrium points Ej(xj, yj) lying on C2 are given by:
where τ = a + λ is the radius of circle C2.

Zeroes of g(λ) for different values of mass parameter β
3.2.3 Equilibrium points on C 3
Let the coordinates of E13 be (a − δ, 0). Thus on substituting x = a − δ and y = 0 in Eq. (3), we have h(δ) = 0, where
On solving Eq. (6) for various values of mass parameter β by Newton–Raphson iteration method, we have location of E13. Eq. (6) possesses only one real root for 0 < β < 1/6 as shown in Fig. 7. It is observed that as the mass parameter β increases, δ decreases and the equilibrium point E13 moves toward the primary P1 along x-axis. The numerical positions of E13 and other equilibrium points on C3 for various values of mass parameter β are given in Table 3. The coordinates of the equilibrium points Ek(xk, yk) on C3 are given by:
where ε = a − δ is the radius of circle C3.

Zeroes of h(δ) for different values of mass parameter β
Finally, it is concluded that there exist 18 equilibrium points (E1, E2, …, E18) in total and in particular 6 equilibrium points on each circle C1, C2 and C3, respectively. The equilibrium points E1, E2, …, E6 are lying on circle C1; E7, E8, …, E12 on circle C2 and E13, E14, …, E18 on circle C3. The numerical locations of all equilibrium points on circles C1, C2 and C3 for various values of mass parameter β are given in Tables 1, 2 and 3, respectively. This is also observed that as the mass parameter β increases, the radius of circle C1 and C2 increases while the radius of circle C3 decreases. Hence the equilibrium points on C1 and C2 move away from the peripheral primaries and the equilibrium points on C3 come closer to central primary (Fig. 8).

Radius of C1, C2, C and C3 with respect to β
4 Stability of equilibrium points in orbital plane
In this section, we study the possible motion of infinitesimal mass around all the equilibrium points E1, E2, …, E18. Instead of discussing the stability of all equilibrium points we focus only on one equilibrium point on each circle C1, C2 and C3, respectively. The stability of one equilibrium point on any circle C1, C2 and C3 implies the stability of other equilibrium points on the same circle. Therefore, let us assume that the coordinates of these equilibrium points are (x0, y0). On giving small displacement (ζ, η) to (x0, y0) and considering only linear terms in ζ and η, the variation ζ and η can be written as: ζ = x–x0 and η = y–y0 and the equation of the motion (1) become
The characteristic equation of Eq. (7) is given by
is a fourth degree equation in Π, where
Let Π2 = χ, therefore the characteristic Eq. (8) becomes
which is a quadratic equation in χ. If χ1 and χ2 are the roots of Eq. (9) then
where D is the discriminant of Eq. (9) and defined as D = p2 – 4q, \(p = 4 - \mathop U\limits^{o}_{xx} \, - \mathop U\limits^{o}_{yy} ,\) \(q = \mathop U\limits^{o}_{xx} \,\mathop U\limits^{o}_{yy} - \mathop {(U}\limits^{o}_{xy} )^{2} .\)
Therefore, the roots corresponding to characteristic Eq. (8) are given by
The equilibrium point (x0, y0) is said to be stable if χ1,2 < 0.
4.1 Stability of equilibrium points on C 1
For E1: The discriminant of Eq. (9) is positive, i.e., D > 0 for all values of mass parameter β (Fig. 9) and thus the roots of Eq. (9) are real and unequal. The roots of Eq. (9), i.e., χ1,2 for different values of mass parameter μ are plotted in Fig. 10 and it is observed that χ1 > 0 and χ2 < 0 and hence the roots of characteristic Eq. (8) are of the form Π1,2 = ± u and Π3,4 = ± iv, u, v ϵ R which leads to instability of equilibrium point E1 (Table 4). Hence the other equilibrium points on C1 are also unstable for all values of mass parameter μ.

D with respect to β for E1

χ1,2 with respect to β for E1
4.2 Stability of equilibrium points on C 2
For E8: D ≥ 0 if and only if 0 < β ≤ 0.0027284 (Fig. 11) and thus Eq. (9) possesses real roots in the interval 0 < β ≤ 0.0027284. The roots of Eq. (9), i.e., χ1,2 for 0 < β ≤ 0.0027284 are plotted in Fig. 12 and it is observed that χ1 < 0 and χ2 < 0 and hence the roots of characteristic Eq. (8) are of the form Π1,2 = ± iu1 and Π3,4 = ± iv1, u1, v1 ϵ R which leads to stability of equilibrium point E8 (Table 5). Hence the other equilibrium points on C2 are also stable for the critical mass parameter 0 < β ≤ β0, β0 = 0.0027284.

D with respect to β for E8

χ1,2 with respect to β for E8
4.3 Stability of equilibrium points on C 3
For E13: D > 0 for all values of mass parameter β (Fig. 13) and thus the roots of Eq. (9) are real and unequal. The roots of Eq. (9), i.e., χ1,2 for different values of mass parameter β are plotted in Fig. 14 and it is observed that χ1 > 0 and χ2 < 0 and hence the roots of characteristic Eq. (8) are of the form Π1,2 = ± u2 and Π3,4 = ± iv2, u2, v2 ϵ R which leads to instability of equilibrium point E13 (Table 6). Hence the other equilibrium points on C2 are also unstable for all values of mass parameter β.

D with respect to β for E13

χ1,2 with respect to β for E13
5 Regions of motion
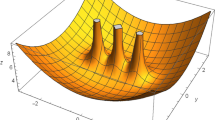
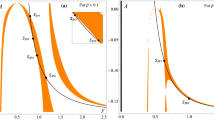
In this section, the regions of motion for a fixed value of mass parameter β and different values of Jacobi constant c have been plotted. The values of Jacobi constant c are computed numerically at all the equilibrium points (E1, E2, …, E18) using Eq. 2U–c = 0 in Table 7. Figure 15a, the zero velocity regions have been plotted for c = 3.5 and a circular white region around the central primary has been observed. The white and shaded regions correspond to permitted and restricted regions of motion, respectively for the motion of infinitesimal mass. For c = 3.25, some small white regions appear around the primaries P1, P2, P3, P5 and P6 which allow to move infinitesimal mass in the vicinity of P1, P2, P3, P5 and P6 only (Fig. 15b). For c = c3, a transition exists at the equilibrium points E13, E14, E15, E16, E17 and E18 which allow the infinitesimal mass to move from central primary to other peripheral primaries but it cannot move to the outer region, Fig. 15c. For c = c1, again some transitions exist at the equilibrium points E1, E2, E3 E4, E5 and E6 which allow the infinitesimal mass to move from E13, E14, E15, E16, E17 and E18 to outer region and the forbidden region constitutes six branches containing equilibrium points E7, E8, E9, E10, E11and E12, respectively, Fig. 15d. For c = 3.015, the forbidden region get reduced and the infinitesimal mass is allowed to move in the entire xy-plane except the forbidden region containing equilibrium points E7, E8, E9, E10, E11 and E12, Fig. 15e. For c = c2, all the forbidden regions has been disappeared and the infinitesimal mass can move in the entire xy-plane, Fig. 15f. Thus, it is observed that the forbidden region decreases as the value of Jacobi constant c decreases.

Regions of motion for β = 0.01 and different values of Jacobi constant c; a: c = 3.5; b: c = 3.4; c: c = 3.28; d: c = 3.265; e: c = c1; f: c = c2
6 Conclusion
We have studied the dynamics of infinitesimal mass around the equilibrium points in the restricted eight-body problem. This problem is a particular case of n + 1-body problem studied by Kalvouridis [27]. In this paper, we considered six peripheral primaries P1, P2, …, P6, each of mass m, revolve in a circular orbit of radius a with an angular velocity ω about their common center of mass O. The primaries Pi (i = 1, 2, …, 6) are revolve in a way such that P1, P3, P5 and P2, P4, P6 always form equilateral triangles of side l and have a common circumcenter where the seventh more massive primary P0 of mass m0 rests. The equations of motion for the infinitesimal mass in synodic coordinate system and dimensionless variables are given by Eq. (1). On solving the Eqns. Ux(x, y) = 0, Uy(x, y) = 0 and z = 0 we found 18 equilibrium points such that four equilibrium points are on x-axis, two on y-axis and rest are in orbital plane of the primaries. All the equilibrium points lie on the concentric circles C1, C2 and C3 centered at origin. It is observed that as the mass parameter β increases, the radius of circles C1 and C2 also increases and the equilibrium points on C1 and C2 move away from the peripheral primaries. On the other hand, the radius of circle C3 decreases as β increases and the equilibrium points on C3 come closer to the central primary. The stability of equilibrium points depends upon the nature of roots of characteristic Eq. (8). On solving the characteristic Eq. (8) for various values of mass parameter β in the interval 0 < β < 1/6 we found that the equilibrium points on circle C2 are stable for the critical mass parameter β0 while the equilibrium points on circles C1 and C3 are unstable for all values of mass parameter β. In the last section of this paper, the regions of motion for infinitesimal mass are investigated and it is found that the forbidden region decreases as the value of Jacobi constant c decreases.
References
Ansari, A.A.: The circular restricted four-body problem with triaxial primaries and variable mass. Appl. Appl. Math. 13, 818–838 (2018)
Baltagiannis, A.N., Papadakis, K.E.: Equilibrium points and their stability in the restricted four-body problem. Int. J. Bifurc. Chaos 21(8), 2179–2193 (2011)
Bang, D., Elmabsout, B.: Restricted N+1-body problem: existence and stability of relative equilibria. Celest. Mech. Dyn. Astron. 89, 305–318 (2004)
Bhatnagar, K.B., Hallan, P.P.: Effect of perturbed potentials on the stability of libration points in the restricted problem. Celest. Mech. 20, 95–103 (1979)
Casasayas, J., Nunes, A.: A restricted charged four-body problem. Celest. Mech. Dyn. Astron. 47, 245–266 (1990)
Celli, M.: The central configurations of four masses x, -x, y, -y. J. Differ. Eq. 235, 668–682 (2007)
Chen, J., Yang, M.: Central configurations of the 5-body problem with four infinitesimal particles. Few-Body Syst. 61, 26 (2020)
Chernikov, Y.A.: The photogravitational restricted three body problem. Soviet Astronomy-AJ 14, 176–181 (1970)
Choudhary, R.K.: Libration points in the generalized elliptic restricted three body problem. Celest. Mech. 16, 411–419 (1977)
Cid, R., Ferrer, S., Caballero, J.A.: Asymptotic solutions of the restricted problem near equilateral Lagrangian points. Celest. Mech. Dyn. Astron. 35, 189–200 (1985)
Corbera, M., Cors, J.M., Llibre, J.: On the central configurations of the planar 1+3 body problem. Celest. Mech. Dyn. Astron. 109, 27–43 (2011)
Danby, J.M.A.: Stability of the triangular points in the elliptic restricted problem of three bodies. Astron. J. 69(2), 165–172 (1964)
Davis, C., Geyer, S., Johnson, W., Xie, Z.: Inverse problem of central configurations in the collinear 5-body problem. J. Math. Phys. 59, 052902 (2018)
Douskos, C.N.: Collinear equilibrium points of Hill’s problem with radiation and oblateness and their fractal basins of attraction. Astrophys. Space Sci. 326, 263–271 (2010)
Ershkov, S.V., Leshchenko, D.: Solving procedure for 3D motions near libration points in CR3BP. Astrophys. Space Sci. 364, 207 (2019)
Ershkov, S., Leshchenko, D., Prosviryakov, Y.: Semi-analytical approach in BiER4BP for exploring the stable positioning of the elements of a Dyson sphere. Symmetry 15, 326 (2023)
Gao, C., Yuan, J., Sun, C.: Equilibrium points and zero velocity surfaces in the axisymmetric five-body problem. Astrophys. Space Sci. 362, 72 (2017)
Idrisi, M.J., Taqvi, Z.A.: Restricted three-body problem when one of the primaries is an ellipsoid. Astrophys. Space Sci. 348, 41–56 (2013)
Idrisi, M.J.: Existence and stability of the non-collinear libration points in the restricted three body problem when both the primaries are ellipsoid. Astrophys. Space Sci. 350, 133–141 (2014)
Idrisi, M.J.: A study of libration points in modified CR3BP under albedo effect when smaller primary is an ellipsoid. J. Astronaut. Sci. 64, 379–398 (2017)
Idrisi, M.J., Ullah, M.S.: Non-collinear libration points in ER3BP with albedo effect and oblateness. J. Astrophys. Astron. 39, 28 (2018)
Idrisi, M.J., Ullah, M.S.: A study of albedo effects on libration points in the elliptic restricted three-body problem. J. Astronaut. Sci. 67, 863–879 (2020a)
Idrisi, M.J., Ullah, M.S.: Central-body square configuration of restricted-six body problem. New Astron. 79, 101381 (2020b)
Idrisi, M.J., Ullah, M.S., Sikkandhar, A.: Effect of perturbations in coriolis and centrifugal forces on equilibrium points in the restricted six-body problem. J. Astronaut. Sci. 68, 4–25 (2021)
Idrisi, M.J., Ullah, M.S.: Out-of-plane equilibrium points in the elliptic restricted three-body problem under albedo effect. New Astron. 89, 101629 (2021)
Idrisi, M.J., Ullah, M.S.: Motion around out-of-plane equilibrium points in the frame of restricted six-body problem under radiation pressure. Few-Body Syst. 63, 50 (2022)
Kalvouridis, T.J.: A planar case of the n + 1 body problem: the ‘Ring’ problem. Astrophys. Space Sci. 260, 309–325 (1999)
Kumari, R., Kushvah, B.S.: Equilibrium points and zero velocity surfaces in the restricted four-body problem with solar wind drag. Astrophys. Space Sci. 344, 347–359 (2013)
Kumari, R., Pal, A.K., Bairwa, L.K.: Periodic solution of circular Sitnikov restricted four-body problem using multiple scales method. Arch. Appl. Mech. 92, 3847–3860 (2022)
Marchesin, M.: Stability of a rhomboidal configuration with a central body. Astrophys. Space Sci. 362, 1–13 (2017)
Markellos, V.V., Papadakis, K.E., Perdios, E.A.: Non-linear stability zones around triangular equilibria in the plane circular restricted three-body problem with oblateness. Astrophys. Space Sci. 245, 157–164 (1996)
Michalodimitrakis, M.: The circular restricted four-body problem. Astrophys. Space Sci. 75, 289–305 (1981)
Pacella, F.: Central configurations of the N-body problem via equivariant Morse theory. Arch. Rat. Mech. Anal. 97, 59–74 (1987)
Papadouris, J.P., Papadakis, K.E.: Equilibrium points in the photogravitational restricted four-body problem. Astrophys. Space Sci. 344, 21–38 (2013)
Pappalarado, C.M., Lettieri, A., Guida, D.: Stability analysis of rigid multibody mechanical systems with holonomic and nonholonomic constraints. Arch. Appl. Mech. 90, 1961–2005 (2020)
Qiu-Dong, W.: The global solution of the N-body problem. Celest. Mech. Dyn. Astron. 50, 73–88 (1990)
Roberts, G.E.: Linear stability of the elliptic lagrangian triangle solutions in the three-body problem. J. Differ. Eq. 182(1), 191–218 (2002)
Roy, A.E., Steves, B.A.: Some special restricted four-body problems–II. From caledonia to copenhagen. Planetary Space Sci. 46, 1475–1486 (1998)
Siddique, M.A.R., Kashif, A.R., Shoaib, M., Hussain, S.: Stability analysis of the rhomboidal restricted six-body problem. Adv. Astronomy 6, 1–15 (2021)
Siddique, M.A.R., Kashif, A.R.: The restricted six-body problem with stable equilibrium points and a rhomboidal configuration. Adv. Astronomy 2022, 8100523 (2022)
Szebehely, V.: Theory of orbits. The restricted problem of three bodies. Academic Press, New York and London (1967)
Turyshev, S.G., Toth, V.T.: New perturbative method for solving the gravitational N-body problem in the general theory of relativity. Int. J. Modern Phys. 24, 1550039 (2015)
Ullah, M.S., Idrisi, M.J., Kumar, V.: Elliptic Sitnikov five-body problem under radiation pressure. New Astron. 80, 101398 (2020)
Ullah, M.S., Idrisi, M.J., Sharma, B.K., Kaur, C.: Sitnikov five-body problem with combined effects of radiation pressure and oblateness. New Astron. 87, 101574 (2021)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding publication of this manuscript.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Idrisi, M.J., Ullah, M.S., Mulu, G. et al. The circular restricted eight-body problem. Arch Appl Mech 93, 2191–2207 (2023). https://doi.org/10.1007/s00419-023-02379-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-023-02379-3