
Abstract
In this article, we present two conservative and fourth-order compact finite-difference schemes for solving the generalized Rosenau–Kawahara–RLW equation. The proposed schemes are energy-conserved, convergent, and unconditionally stable, and the numerical convergence orders in both \(l_{2}\)-norm and \(l_{\infty }\)-norm are of \(O(\tau ^{2}+h^{4})\). Numerical experiments demonstrate that the present schemes are efficient and reliable.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear phenomena play important roles in various fields of science and engineering. In recent years, there has been a growing interest in the computation of nonlinear wave phenomena using different mathematical models. These models include the KdV equation [1,2,3], the Benjamin–Bona–Mahony equation or RLW equation [4,5,6], the Rosenau equation [7, 8], the Rosenau–RLW equation [9, 10], the Kawahara equation [11, 12], the Rosenau–Kawahara equation [13], and many others [14,15,16,17].
In this article, we consider the following initial-boundary value problem of the generalized Rosenau–Kawahara–RLW equation: [18]:
where \(\Omega = [x_{l},x_{r}]\), \(0\le t\le T\), \(\alpha \), \(\beta \), \(\gamma \), and \(\theta \) are real positive constants, \(\delta \) and \(\lambda \) are positive constants, \(p\ge 1\) is a positive integer, and \(u_{0}(x)\) is a given smooth function. It should be pointed out that, here, u(x, t) represents the wave profile, which has the following asymptotic values [19]:
Thus, the boundary conditions (3) are meaningful for the solitary solution of Eq. (1).
It is easy to verify that the problem (1)–(3) has the following conservation law [20, 21]:
Lemma 1.1
(See [20]) Suppose that \(u_{0}\in H_{0}^{2}(\Omega )\), and then, the solution u(x, t) of the problem (1)–(3) satisfies:
Theorem 1.2
Suppose that \(u_{0}\in H_{0}^{2}(\Omega )\), and then, the problem (1)–(3) is well posed.
Proof
Assume that \(u_{1}\) and \(u_{2}\) are two solutions of the problem (1)–(3) satisfying the initial conditions \(u_{0}^{(1)}\) and \(u_{0}^{(2)}\), respectively. Let \(\eta =u_{1}-u_{2}\), and then, \(\eta \) satisfies:
Multiplying Eq. (5) by \(\eta \), and then, integrating it over \( [x_{l},x_{r}]\), we obtain:
Using the integration by parts and the boundary conditions (6), we have:
Letting:
Substituting Eqs. (8)–(10) into Eq. (7), we obtain:
By Lemma 1.1 and the Cauchy–Schwarz inequality, we obtain:
where C is a constant. Substituting the above two inequalities into Eq. (11), we obtain:
Since \(\theta \) is a positive constant, we have:
This leads to:
Thus, if \(u_{0}^{(1)}=u_{0}^{(2)}\), we have \(\eta (x,0)=0\) and, hence, \(G(0)=0\), implying that \(G(t)=0\). By the Sobolev inequality, we obtain \(\Vert \eta \Vert _{L_{\infty }}=0\) and \(u_{1}=u_{2}\). Furthermore, if
we obtain \(G(0)<\varepsilon \) and hence:
implying that the solution is continuously dependent on the initial condition. We conclude that the problem (1)–(3) is well posed. This completes the proof. \(\square \)
For the generalized Rosenau–Kawahara–RLW equation (1), He and Pan [18] presented a second-order accurate implicit difference scheme, which is energy-conserved and unconditionally stable. Wang and Dai [20] proposed a fourth-order accurate conservative finite-difference scheme and their numerical analysis showed that the method can be applied to study the solitary wave traveling in a long time. Ghiloufi et al. [21] proposed two conservative finite-difference schemes for the Rosenau–Kawahara–RLW equation, and both schemes are fourth-order convergent in space variables. However, the above finite-difference schemes in Refs. [20, 21], although they have the fourth-order numerical precision, employ a nine-point discrete method. Thus, the purpose of this paper is to establish two new conservative high-order compact finite-difference schemes for solving the generalized Rosenau–Kawahara–RLW equation. The coefficient matrices of these new schemes are both seven-diagonal. And we rigorously prove that the two schemes are unconditionally stable and conserve the energy in the discrete sense.
The outline is as follows. In Sect. 2, a nonlinear conservative difference scheme for the problem (1)–(3) is described in detail, and corresponding conservation, stability, and convergence are proved. In Sect. 3, a three-time-level linearized compact finite-difference scheme is constructed. The discrete conservative law, the unique solvability, the prior error estimates, and the unconditional convergence of the difference scheme are shown. In Sect. 4, an iterative algorithm for the nonlinear compact scheme is given and its convergence is proved. In Sect. 5, we present some numerical examples to show the performance of the schemes and confirm our theoretical analysis. Finally, conclusions are drawn in the last section.

Absolute error distribution of Example 5.1 computed by Scheme A (left) and Scheme B (right) with \(h=0.125\) and \(\tau =h^{2}\) at \(T=4\)

Numerical solutions of Example 5.1 computed by Scheme A (left) and Scheme B (right) with \(h=0.25\) and \(\tau =0.1\)

Discrete energy for long-time simulations of Example 5.2 computed by Scheme A (left) and Scheme B (right) when \(h=0.1\) and \(\tau =0.01\)
2 Nonlinear compact difference scheme
In this section, we propose a two-time-level nonlinear and conservative fourth-order compact finite-difference scheme for the problem (1)–(3).
2.1 Construction of nonlinear-implicit scheme
We first define the solution domain to be \( [x_{l},x_{r}]\times [0,T]\), which is covered by a uniform grid \((x_{j},t^{n})\), where:
At each point \((x_{j},t^{n})\), the symbol \(u(x_{j},t^{n})\) is denoted as the exact solution, while the associated numerical solution is represented by \(U^{n}_{j}\approx u(x_{j},t^{n})\). The following notations are introduced for the simplicity:
To get the high-order scheme, we use the following two fourth-order compact finite-difference operators [22]:
For the discretization of the first-order derivative \(u_{x}\) and the second-order derivative \(u_{xx}\) of the function u(x, t), we have the following formulas [23]:
Omitting the small terms \(O(h^{4})\), we obtain:
We now introduce the vector and matrix notations as:
where \( [,]^{\text {T}}\) is the transpose of the vector [, ]. Thus, the corresponding matrix form is:
Since \(M_{1}\) and \(M_{2}\) are two real symmetric positive definite matrices, there exist two real symmetric positive definite matrices \(H_{1}\) and \(H_{2}\), such that [24]:
Introducing the new functions y, z, w, d, g, and \(\phi \), Eq. (1) can be written as:
Therefore, the original problem (1)–(3) is changed to an equivalent system of the second-order differential equations (12)–(14). Using the above notations, we construct the nonlinear compact difference scheme for solving the system (12)–(14) as follows:
Thus, the compact finite-difference scheme (20) can be rewritten in the following matrix form:
where
The initial condition (2) is discretized as:
It should be pointed out that since \(U^{n}_{0}=(U^{n}_{0})_{{\hat{x}}}=0\), \(U^{n}_{J}=(U^{n}_{J})_{{\hat{x}}}=(U^{n}_{J})_{\tilde{x}\bar{x}}=0\) from Eq. (3) and \(\partial ^{n}u/\partial x^{n}\rightarrow 0\) as \(x\rightarrow {\pm \infty }\) in Eq. (4), \(n\ge 1\), we may assume:
for simplicity, where \(j=-1,J+1\) are ghost points. We further denote:
Hence, \(U^{n}\in R_{0}^{J}\), \(0\le n\le N\).
2.2 Auxiliary lemmas
To analyze the discrete conservative properties for the compact finite-difference scheme (5)–(7), the following lemmas should be introduced.
Lemma 2.1
[25, 26] For any two mesh functions \(U, V\in R_{0}^{J}\), we have:
Lemma 2.2
[20] For any mesh function \(U^{n}\in R_{0}^{J}\), we have:
Lemma 2.3
[18] For any discrete function \(U^{n}\) on the finite interval \( [x_{l},x_{r}]\), there exist two positive constants \(C_{1}\) and \(C_{2}\), such that:
Lemma 2.4
[27] The eigenvalues of the matrices \(M_{1}\) and \(M_{2}\) are, respectively, in the following forms:
Lemma 2.5
[24] For any real value symmetric positive definite matrices H and for \(U, V\in R_{0}^{J}\), we have:
where \(\mathfrak {R}\) is obtained by the Cholesky decomposition of H, denoted as \(H=\mathfrak {R}^{\text {T}}\mathfrak {R}\).
Lemma 2.6
For any mesh function \(U\in R_{0}^{J}\), we have:
where \(\mathfrak {R}_{i}\) is obtained by the Cholesky decomposition of \(H_{i}\), denoted as \(H_{i}=\mathfrak {R}_{i}^{\text {T}}\mathfrak {R}_{i}\), \(i=1,2\).
Proof
It follows from Lemma 2.4 that the eigenvalues of the matrices \(M_{1}\) and \(M_{2}\) satisfy:
This implies that:
Thus, we obtain:
where \(\rho (H_{i})\) is the spectral radius of the matrices \(H_{i}\), \(i=1,2\). Note that:
It follows from Eq. (24) that:
This completes the proof. \(\square \)
Lemma 2.7
[24] For any mesh function \(U\in R_{0}^{J}\), we have:
Lemma 2.8
[24] For any mesh function \(U\in R_{0}^{J}\), we have:
Lemma 2.9
For any two mesh functions \(U,V\in R_{0}^{J}\), we have:
Proof
For \(U,V\in R_{0}^{J}\), from Lemma 2.1, we have:
Furthermore, we obtain:
This completes the proof. \(\square \)
Lemma 2.10
For any mesh function \(U\in R_{0}^{J}\), we have:
Proof
For \(U\in R_{0}^{J}\), from Lemmas 2.1 and 2.5, we have:
and then, we have \(\langle H_{1}^{2}H_{2}U_{\tilde{x}{\bar{x}}\tilde{x}\bar{x}{\hat{x}}},U\rangle =0\). This completes the proof. \(\square \)
2.3 Discrete conservative law
We now analyze the discrete conservation for the nonlinear compact finite-difference scheme (21)–(23).
Theorem 2.11
The nonlinear compact finite-difference scheme (21)–(23) is conservative in the sense of the discrete energy, that is:
where \(\delta >0\), \(\lambda >0\), \(n=0,1,2,\ldots ,N\).
Proof
Computing the discrete inner product of Eq. (21) with 2\(U^{n+\frac{1}{2}}\) and using Lemmas 2.2, 2.5, 2.8, and 2.10, we obtain:
Therefore, we have:
Consequently, we obtain \(E_{1}^{n}=E_{1}^{n-1}=\cdots =E_{1}^{0}\). This completes the proof. \(\square \)
2.4 A priori estimates
Theorem 2.12
Suppose that \(u_{0}\in H_{0}^{2}( [x_{l},x_{r}])\), and then, the solution \(U^{n}\) of the compact finite-difference scheme (21)–(23) satisfies:
which yield \(\Vert U^{n}\Vert _{\infty }\le C\) and \(\Vert U_{\tilde{x}}^{n}\Vert _{\infty }\le C\) for any \(0\le n\le N\).
Proof
By the assumption that \(\delta \) and \(\lambda \) are positive constants, from Lemmas 2.6, 2.7 and Theorem 2.11, it yields:
Therefore, we obtain:
By Lemma 2.3, we obtain \(\Vert U^{n}\Vert _{\infty }\le \tilde{C}\), \(\Vert U_{\tilde{x}}^{n}\Vert _{\infty }\le \tilde{C}\), where:
This completes the proof. \(\square \)
2.5 Solvability
To prove the solvability of the nonlinear compact finite-difference scheme in Eqs. (21)–(23), the following variant of Brouwer fixed point theorem will be used.
Lemma 2.13
[28,29,30] Let \(({\mathcal {H}},\langle \cdot ,\cdot \rangle )\) be a finite-dimensional inner product space, \(\Vert \cdot \Vert \) be the associated norm, and \(g: {\mathcal {H}}\rightarrow {\mathcal {H}}\) be continuous. Assume that:
Then, there exists a \(z^{*}\in {\mathcal {H}}\), such that \(g(z^{*})=0\) and \(\Vert z^{*}\Vert \le \xi \).
Theorem 2.14
The compact finite-difference scheme (21)–(23) is solvable.
Proof
We know \(U^{0}\) exists. To prove the theorem by using mathematical induction, we assume that \(U^{1},\ldots ,U^{n}\) exist. For \(n\ge 1\), we rewrite Eq. (21) in the form of:
Let \(g: R^{J}_{0}\rightarrow R^{J}_{0}\) defined by:
Then, g is obviously continuous. Taking the inner product of Eq. (25) with V and using Lemmas 2.5, 2.8–2.10, we obtain:
Thus, from Eqs. (26) and (27) and Young’s inequality, we obtain:
Hence, for:
then we have \(\langle g(V),V\rangle >0\), and from Lemma 2.13, we deduce the existence of \(V^{*}\in R_{0}^{J}\), such that \(g(V^{*})=0\). Thus, the existence of \(U^{n+1}=2V^{*}-U^{n}\) is obtained. This completes the proof. \(\square \)
2.6 Convergence and stability
Define the grid function \(u^{n}_{j}=u(x_{j},t^{n})\), \(\omega ^{n}_{j}=u^{n}_{j}-U^{n}_{j}\) and:
and then, the truncation errors of the scheme (21)–(23) satisfy:
According to the Taylor expansion, we have:
Subtracting Eqs. (28)–(30) from Eqs. (21)–(23) and letting \(\Omega ^{n}=V^{n}-U^{n}\), we obtain the following error equation:
where \(\Omega ^{0}=0\).
Lemma 2.15
(See [24]) Assume that \(\{S^{n}\}\) is a non-negative sequence and satisfies:
where A and B are non-negative constants. Then, \(S^{n}\) satisfies \(S^{n}\le A{\text {e}}^{Bn\tau }\), \(n=0,1,\ldots \).
Lemma 2.16
For \(\Omega ^{n+\frac{1}{2}}=(\omega ^{n+\frac{1}{2}}_{1},\omega ^{n+\frac{1}{2}}_{2},\ldots ,\omega ^{n+\frac{1}{2}}_{J})^{\text {T}}\), we have:
Proof
According to Lemma 2.1, we obtain:
Note that:
and
It follows from the Cauchy–Schwarz inequality, Lemma 2.7, and Eqs. (32)–(34), and we obtain:
Thus, applying Lemma 2.5, we have:
This completes the proof. \(\square \)
Theorem 2.17
Assume that \(u_{0}\) is sufficiently smooth and \(u(x,t)\in C^{9,3}_{x,t}( [x_{l},x_{r}]\times [0,T])\), and then, the solution \(U^{n}\) of the compact finite-difference scheme (21)–(23) converges to the solution of the problem (1)–(3) with the convergence rate of \(O(\tau ^{2}+h^{4})\) in the sense of \(\Vert \cdot \Vert \) and \(\Vert \cdot \Vert _{\infty }\) norms.
Proof
Taking the inner product of Eq. (31) with 2\(\Omega ^{n+\frac{1}{2}}\) and using Lemmas 2.2, 2.8–2.10, we have:
According to Lemmas 2.6, 2.7, and 2.16, we obtain:
Furthermore, we have:
Substituting Eqs. (36) and (37) into Eq. (35) gives:
Setting:
we can obtain from Eq. (38) that:
Hence, we obtain:
If \(\tau \) is sufficiently small, such that \(1-C\tau >0\), then we obtain:
Summarizing Eq. (39) from 1 to n, we obtain:
where
Since \(\omega _{j}^{0}=0\), \(j=1,2,\ldots ,J\), we have \(B_{1}^{0}=0\). Therefore, from Lemma 2.15, we obtain \(B_{1}^{n}\le C(\tau ^{2}+h^{4})^{2}\). This yields:
From Lemmas 2.6 and 2.7, we obtain:
According to Lemma 2.3, we conclude that \(\Vert \Omega ^{n}\Vert _{\infty }\le C(\tau ^{2}+h^{4})\). This completes the proof. \(\square \)
Theorem 2.18
Under the conditions of Theorem 2.17, the solution \(U^{n}\) of compact finite-difference scheme (21)–(23) is unconditionally stable in the sense of \(\Vert \cdot \Vert \) and \(\Vert \cdot \Vert _{\infty }\) norms.
Proof
Suppose that there are solutions \(U^{n}_{j}\in R_{0}^{J}\) and \(\tilde{U}^{n}_{j}\in R_{0}^{J}\), which both satisfy the nonlinear finite-difference scheme in Eqs. (21)–(23), such that \(U^{0}_{j}=u_{0}(x_{j})\) and \(\tilde{U}^{0}_{j}=\tilde{u}_{0}(x_{j})\). Set \(F^{n}_{j}=U^{n}_{j}-\tilde{U}^{n}_{j}\), \(0\le j\le J\), \(0\le n\le N\). Using a similar proof as that for Theorem 2.17, we conclude that:
This completes the proof. \(\square \)
2.7 Uniqueness
We now show the uniqueness of the numerical solution.
Theorem 2.19
The compact finite-difference scheme (21)–(23) has a unique solution.
Proof
Assume that both \(U^{n}\) and \(\tilde{U}^{n}\) satisfy the scheme (21)–(23), and let \(\Theta ^{n}=U^{n}-\tilde{U}^{n}\), and then, we obtain:
Taking the inner product of Eq. (40) with \(2\Theta ^{n+\frac{1}{2}}\) and using Lemmas 2.8–2.10, we obtain:
From Lemmas 2.6, 2.7 and 2.16, we have:
Applying Lemmas 2.6, 2.7, 2.15, and Eq. (42), we obtain that for \(\tau \) small enough:
This yields \(\Theta ^{n+1}=0\); that is, Eq. (21) only admits a zero solution. Therefore, the compact finite-difference scheme in Eqs. (21)–(23) determines \(U^{n+1}\) uniquely. This completes the proof. \(\square \)

Spatial convergence order (left) and temporal convergence order (right) of Example 5.2 with different h and \(\tau \) at \(T=4\)

Absolute error distribution of Example 5.2 computed by Scheme A (left) and Scheme B (right) with \(h=0.125\) and \(\tau =h^{2}\) at \(T=4\)

Numerical solutions of Example 5.2 computed by Scheme A (left) and Scheme B (right) with \(h=0.25\) and \(\tau =0.1\)

3 Linearized compact difference scheme
3.1 Construction of linearized compact difference scheme
In this section, we construct a linearized compact finite-difference scheme for solving the system (12)–(14):
where \(j=1,2,\ldots ,J\), \(n=1,2,\ldots ,N-1\). Since the scheme (48) is a three-time-level method, to start the computation, we may get \(U^{1}\) by the following two levels in time method (21) as:
The compact finite-difference scheme (48)–(49) can be rewritten in the following matrix form:
and the initial-boundary conditions are discretized as:
where:
3.2 Conservation
Theorem 3.1
The finite-difference scheme (50)–(53) is conservative in the sense of the discrete energy, that is:
where \(\delta >0\), \(\lambda >0\), \(n=0,1,2,\ldots ,N-1\).
Proof
Computing the discrete inner product of Eq. (50) with 2\(\bar{U}^{n}\), and from Lemmas 2.2, 2.5, 2.8–2.10, we obtain:
Consequently, we obtain \(E_{2}^{n}=E_{2}^{n-1}=\cdots =E_{2}^{0}\). Similarly, taking the inner product of Eq. (51) with \(2U^{\frac{1}{2}}\) yields to:
Thus, we obtain:
This completes the proof. \(\square \)
3.3 Unique solvability
Theorem 3.2
The linearized compact finite-difference scheme (50)–(53) has a unique solution.
Proof
By the mathematical induction, it is obvious that \(U^{0}\) and \(U^{1}\) are uniquely solvable by Eqs. (52) and (51), respectively. Now, suppose that \(U^{0}\), \(U^{1} ,\ldots ,U^{n}\) are uniquely solved. Then, Eq. (50) is a linear system about \(U^{n+1}\). By considering Eq. (50) for \(U^{n+1}\), we have:
Taking the inner product of Eq. (54) with \(U^{n+1}\), we obtain from Lemmas 2.1, 2.8–2.10 that:
This yields \(U^{n+1}=0\); that is, Eq. (50) only admits a zero solution. Therefore, there exists a unique solution \(U^{n+1}\) that satisfies Eqs. (50)–(53). This completes the proof. \(\square \)
3.4 A priori estimates
Theorem 3.3
Suppose that \(u_{0}\in H_{0}^{2}( [x_{l},x_{r}])\), and then, the solution \(U^{n}\) of the compact finite-difference scheme (50)–(53) satisfies:
which yield \(\Vert U^{n}\Vert _{\infty }\le C\) and \(\Vert U_{\tilde{x}}^{n}\Vert _{\infty }\le C\) for any \(0\le n\le N\).
Proof
By the assumption that \(\delta \) and \(\lambda \) are positive constants, from Lemmas 2.6, 2.7, and Theorem 3.1, we obtain:
Therefore, we obtain:
By Lemma 2.3, we obtain \(\Vert U^{n}\Vert _{\infty }\le \bar{C}\), \(\Vert U_{\tilde{x}}^{n}\Vert _{\infty }\le \bar{C}\), where:
This completes the proof. \(\square \)
3.5 Convergence and stability
Lemma 3.4
For \(\Omega ^{n}=(\omega ^{n}_{1},\omega ^{n}_{2},\ldots ,\omega ^{n}_{J})^{\text {T}}\), we have:
Proof
Similar to Lemma 2.16, we obtain:
This completes the proof. \(\square \)
Theorem 3.5
Assume that \(u_{0}\) is sufficiently smooth and \(u(x,t)\in C^{9,3}_{x,t}( [x_{l},x_{r}]\times [0,T])\), and then, the solution \(U^{n}\) of the compact finite-difference scheme (50)–(53) converges to the solution of the problem (1)–(3) with the convergence rate of \(O(\tau ^{2}+h^{4})\) in the sense of \(\Vert \cdot \Vert \) and \(\Vert \cdot \Vert _{\infty }\) norms.
Proof
The truncation error equations of the compact finite-difference scheme in Eqs. (50)–(53) are:
Taking the inner product of Eq. (55) with 2\({{{\bar{\Omega }}}}^{n}\) and using Lemmas 2.2, 2.9, and 2.10, we have:
According to the Cauchy–Schwarz inequality and Lemmas 2.6, 2.7, and 3.4, we obtain:
and
Substituting Eqs. (58) and (59) into Eq. (57) gives:
Setting
we can obtain from Eq. (60) that:
Hence, we obtain:
If \(\tau \) is sufficiently small, such that \(1-C\tau >0\), then we obtain:
Summarizing Eq. (61) from 1 to n, we obtain:
where
Since \(\omega _{j}^{0}=0\), \(j=1,2,\ldots ,J\), we have from Lemma 2.6 that:
where \(\delta >0\), \(\lambda >0\). Taking the inner product of Eq. (56) with 2\({\Omega }^{\frac{1}{2}}\), and using a similar argument in Theorem 2.17, we obtain \(B_{2}^{0}\le C(\tau ^{2}+h^{4})^{2}\). Therefore, from Lemma 2.16, we obtain \(B_{2}^{n}\le C(\tau ^{2}+h^{4})^{2}\). This yield:
From Lemmas 2.6 and 2.7, we obtain:
According to Lemma 2.3, we conclude that \(\Vert \Omega ^{n}\Vert _{\infty }\le C(\tau ^{2}+h^{4})\). This completes the proof. \(\square \)
Using a similar argument, we can prove stability of the difference solution (50)–(53).
Theorem 3.6
Under the conditions of Theorem 3.5, the solution \(U^{n}\) of compact finite-difference scheme (50)–(53) is unconditionally stable in the sense of \(\Vert \cdot \Vert \) and \(\Vert \cdot \Vert _{\infty }\) norms.


Interaction of two solitary waves of Example 5.3 computed by Scheme A and Scheme B with \(x_{l}=-200\), \(x_{r}=300\) at \(T=0\), 5, 10, 15, 20, and 25, respectively
4 Iterative algorithm
In this section, we give an approximate solution of nonlinear system (21)–(23) using an iterative method such as the techniques in Refs. [31, 32]. For fixed n, Eq. (20) can be written as follows:
which can be computed by the following iterative method:
where:
Theorem 4.1
The iterative method (63) converges to the solution of the nonlinear compact difference scheme (20).
Proof
Let
when \(n=0\), we have:
If \(n\ge 1\), we have:
From Eqs. (64), (65), we have:
Therefore, for sufficiently small h and \(\tau \), we have:
Now, suppose that \(\Vert \varepsilon ^{n+\frac{1}{2}(i)}\Vert _{\infty }\le \frac{1}{2}\). It follows from Theorem 2.11 that:
Subtracting Eq. (63) from Eq. (62), we obtain:
which can be rewritten into the following matrix form:
Computing the inner product of Eq. (66) with \(\varepsilon ^{n+\frac{1}{2}(i+1)}\) and using Lemmas 2.1, 2.2, 2.5, 2.8–2.10, we obtain:
As shown by Thomee and Murthy [33], we obtain:
Thus, from Eq. (73), Lemma 2.6 and the Cauchy–Schwarz inequality, we have:
From Eqs. (66)–(72) and (74), we obtain:
which yields:
hence, for \(1-C\tau \ge \frac{1}{2}\), we obtain:
It follows from Lemma 2.6 and Eqs. (75)–(76) that:
Applying Lemma 2.4 with Eqs. (76)–(77), we obtain:
Therefore, if \(\tau \) is sufficiently small, such that \(\tau \le \frac{h}{4CL}\), we have:
Therefore, the iterative algorithm is convergent. This completes the proof. \(\square \)
5 Numerical experiments
In this section, we present some numerical experiments to validate our theoretical results. For convenience, we denote the nonlinear compact difference scheme (21)–(23) as Scheme A and the linearized compact difference scheme (50)–(53) as Scheme B. The generalized Rosenau–Kawahara–RLW equation (1) has the following invariant quantities [34]:
which are computed to check the conversation of the numerical algorithm.
Example 5.1
We considered the parameters \(\alpha =1\), \(\beta =1\), \(\gamma =2\), \(\delta =1\), \(\lambda =1\), \(\theta =1\), and \(p=2\) in Eq. (1), which gives the following Rosenau–Kawahara–RLW equation [18, 20]
where the exact solution is:
In this case, we chose \(x_{l}=-40\) and \(x_{r}=60\). First, to investigate the accuracy of the present schemes, we computed the \(\Vert \cdot \Vert _{\infty }\) norm error of the numerical solutions (78)–(80). If \(\tau \) is sufficiently small, then \(e(h,\tau ) =O(h^{q_{1}}+\tau ^{q_{2}})\approx O(h^{q_{1}})\). Consequently, \(e(2h,\tau )/e(h,\tau )\approx 2^{q_{1}}\) and, hence, \(q_{1}\approx \log _{2} [e(2h,\tau )/e(h,\tau )]\) is the convergence order with respect to h. Likewise, if h is sufficiently small, \(q_{2}\approx \log _{2} [e(h,2\tau )/e(h,\tau )]\) is the convergence rate with respect to \(\tau \). In our computation, we calculated the convergence orders based on the following formula as: [15, 21]:
Tables 1 and 2 give the comparison of error results and CPU times between the present schemes and the non-compact methods in [21]. From Tables 1 and 2, we can see that the convergence orders of the present schemes are equal to \(O(\tau ^{2}+h^{4})\), which confirms the theoretical order of convergence obtained in Theorems 2.17 and 3.5. Furthermore, we observe that the errors from the present schemes are much smaller than that obtained based on the methods in [21]. Also, the present schemes have relatively less computational cost than the methods in [21] do. Thus, we can conclude that the present two compact schemes are more effective than the schemes in [21].
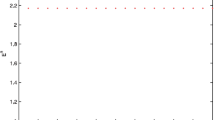
To show that the two compact difference schemes have the energy conservative properties, we then listed the conservative invariants \(E_{1}^{n}\) and \(E_{2}^{n}\) at various times in Table 3, where \(h=0.1\), \(\tau =0.01\). The obtained results in Table 3 verify that the present schemes preserve the discrete conservative properties very well as time increases. Moreover, we can see from Table 3 that both \(E_{1}^{n}\) and \(E_{2}^{n}\) are conserved in our simulations with at least five-digit correctness after decimal point. This confirms the theoretical conservation shown in Theorems 2.11 and 3.1. In Table 4, we listed the theoretical values I(t), numerical approximations \(I^{n}\), and the corresponding error values \(|I(t)-I^{n}|/I(t)\) for the two conserved quantities, where \( [x_{l},x_{r}]= [-30,30]\), \(T=1\), \(h=0.125\), and \(\tau =h^2\). In Fig. 1, we drew the absolute error distributions with \(h=0.125\), \(\tau =h^{2}\) at \(T=4\). From Table 4 and Fig. 1, we can see that this numerical approximations are in good agreement with the analytical solutions. Then, we plotted the motion of solitary wave with \(h=0.25\) and \(\tau =0.1\) at different time levels in Fig. 2. From Fig. 2, we see that the agreement between forms of approximate solutions at \(T=0\) and \(T=20\), 40 is excellent. The values of the invariants \(I^{n}_{1}\) and \(I^{n}_{2}\) at different times are listed in Table 5. The numerical results in Fig. 2 and Table 5 indicate that the present schemes can preserve the discrete conservation properties. Thus, the present schemes are effective for studying the solitary wave traveling at long time.
Example 5.2
We considered the parameters \(\alpha =1\), \(\beta =1\), \(\gamma =2\), \(\delta =1\), \(\lambda =1\), \(\theta =1\), and \(p=4\) in Eq. (1), which gives the following Rosenau–Kawahara–RLW equation [18, 20]:
where the exact solution is:
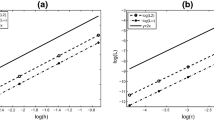
First, we displayed some values of discrete energy of Scheme A and Scheme B in Fig. 3, where \(h=0.1\), \(\tau =0.01\). The obtained results in From Fig. 3 also verify that the present two schemes are conservative perfectly for energy. Then, the spatial and temporal convergence orders for numerical solutions with different h and \(\tau \) at \(T=4\) are shown in Fig. 4, where the case of \(h=0.8\), 0.4, 0.2, \(\tau =0.0002\) is plotted in Fig. 4a, and the case of \(h=0.05\), \(\tau =0.4\), 0.2, 0.1 is plotted in Fig. 4b. From Fig. 4, we can also see that the convergence orders for both schemes are fourth-order accuracy in space and second-order accuracy in time. The absolute error distributions with \(h=0.125\), \(\tau =h^{2}\) at \(T=4\) are plotted in Fig. 5. These indicate that numerical solutions are very accurate as compared with the exact solutions. The profiles of the solitary waves with \(h=0.25\), \(\tau =h^{2}\) at different time levels \(T=0\), 30, 60 are plotted in Fig. 6. From Fig. 6, we can see that the waves at \(T=30\) and 60 agree with the ones at \(T=0\) quite well, which also demonstrates the accuracy and efficiency of the present schemes. The surfaces of the waves with \(h=0.1\), \(\tau =h^{2}\) at \(T=10\) and 20 are drawn in Figs. 7 and 8, respectively. We can see that the waves travel from left to right direction without changing their shapes.
Example 5.3
We considered the interaction of two solitary waves using the following initial condition [34]:
where:
for \(i=1\),2, \(\bar{x}_{i}\) is arbitrary constant.
Here, we chose the parameters \(\alpha =5\), \(\beta =10\), \(\gamma =0.2\), \(\delta =0.1\), \(\lambda =7\), \(\theta =0.1\), and \(p=2\) in Eq. (1), which gives the following Rosenau–Kawahara–RLW equation:
In this case, the exact solution is unknown. We calculated the solution on the domain \( [-250,500]\times [0,40]\), with \(\bar{x}_{1}=-10\), \(\bar{x}_{2}=20\), \(c_{1}=1.5\), \(c_{2}=0.3\), \(h=0.1\), and \(\tau =0.1\). Table 6 presents a comparison of the numerical errors of the invariants obtained by the present methods with those provided by B-spline collocation method [34], in which one can see that the present methods are more accurate than B-spline collocation method in Ref. [34]. Finally, the interactions of these two solitary waves at different time levels are plotted in Fig. 9. We can see that the larger wave catches up with the smaller wave during the time evolution of the solitary waves, and after the interaction, the two solitary waves regain their original shapes again.
6 Conclusion
We have developed two conservative and fourth-order compact finite-difference schemes for the generalized Rosenau–Kawahara–RLW equation. Both schemes have been shown to be second-order convergent in time and fourth-order convergent in space. Conservation of the discrete energy, existence, uniqueness, and unconditional stability of the numerical solutions are proved. Numerical experiments show that the present schemes provide accurate numerical solutions which coincide with the theoretical results.
References
Cui Y, Mao D (2007) Numerical method satisfying the first two conservation laws for the Korteweg–de Vries equation. J Comput Phys 227:376–399
Wang M, Li DF, Zhang CJ, Tang YB (2012) Long time behavior of solutions of gKdV equations. J Math Anal Appl 390:136–150
Shen JY, Wang XP, Sun ZZ (2020) The conservation and convergence of two finite difference schemes for KdV equations with initial and boundary value conditions. Numer Math Theor Methods Appl 13:253–280
Shao X, Xue G, Li C (2013) A conservative weighted finite difference scheme for regularized long wave equation. Appl Math Comput 219:9202–9209
Cai JX, Gong YZ, Liang H (2017) Novel implicit/explicit local conservative schemes for the regularized long-wave equation and convergence analysis. J Math Anal Appl 447:17–31
Bayarassou K (2019) Fourth-order accurate difference schemes for solving Benjamin–Bona–Mahony–Burgers (BBMB) equation. Eng Comput. https://doi.org/10.1007/s00366-019-00812-2
Rosenau P (1988) Dynamics of dense discrete systems. Prog Theor Phys 79:1028–1042
Cai W, Sun Y, Wang Y (2015) Variational discretizations for the generalized Rosenau-type equations. Appl Math Comput 271:860–873
Pan X, Zhang L (2012) On the convergence of a conservative numerical scheme for the usual Rosenau–RLW equation. Appl Math Model 36:3371–3378
Atouani N, Omrani K (2013) Galerkin finite element method for the Rosenau–RLW equation. Comput Math Appl 66:289–303
Polat N, Kaya D, Tutalar H (2006) An analytic and numerical solution to a modified Kawahara equation and a convergence analysis of the method. Appl Math Comput 179:466–472
Zuo J (2009) Solitons and periodic solutions for the Rosenau–KdV and Rosenau–Kawahara equations. Appl Math Comput 215:835–840
He D (2015) New solitary solutions and a conservative numerical method for the Rosenau–Kawahara equation with power law nonlinearity. Nonlinear Dyn 82:1177–1190
Karakoc B, Ak T (2016) Numerical simulation of dispersive shallow water waves with Rosenau–KdV equation. Int J Adv Appl Math Mech 3:32–40
Wang X, Dai W (2018) A three-level linear implicit conservative scheme for the Rosenau–KdV–RLW equation. J Comput Appl Math 330:295–306
Xie J, Zhang Z, Liang D (2019) A conservative splitting difference scheme for the fractional-in-space Boussinesq equation. Appl Numer Math 143:61–74
Wang J, Liang D, Wang Y (2019) Analysis of a conservative high-order compact finite difference scheme for the Klein–Gordon–Schrödinger equation. J Comput Appl Math 358:84–96
He D, Pan K (2015) A linearly implicit conservative difference scheme for the generalized Rosenau–Kawahara–RLW equation. Appl Math Comput 271:323–336
Burde G (2011) Solitary wave solutions of the high-order KdV models for bi-directional water waves. Commun Nonlinear Sci Numer Simul 16:1314–1328
Wang X, Dai W (2018) A new implicit energy conservative difference scheme with fourth-order accuracy for the generalized Rosenau–Kawahara–RLW equation. Comput Appl Math 37:6560–6581
Ghiloufi A, Rahmeni M, Omrani K (2019) Convergence of two conservative high-order accurate difference schemes for the generalized Rosenau–Kawahara–RLW equation. Eng Comput. https://doi.org/10.1007/s00366-019-00719-y
Wang B, Sun T, Liang D (2019) The conservative and fourth-order compact finite difference schemes for regularized long wave equation. J Comput Appl Math 356:98–117
Moghaderi H, Dehghana M (2016) A multigrid compact finite difference method for solving the one-dimensional nonlinear sine-Gordon equation. Math Methods Appl Sci 38:3901–3922
Ghiloufi A, Omrani K (2018) New conservative difference schemes with fourth-order accuracy for some model equation for nonlinear dispersive waves. Numer Methods Part D E 34:451–500
Wang X, Dai W (2019) A conservative fourth-order stable finite difference scheme for the generalized Rosenau–KdV equation in both 1D and 2D. J Comput Appl Math 55:310–331
Hu B, Xu Y, Hu J (2008) Crank–Nicolson finite difference scheme for the Rosenau–Burgers equation. Appl Math Comput 204:311–316
Zhou Y (1990) Applications of discrete functional analysis to the finite difference method. International Academic, Beijing
Browder F (1965) Existence and uniqueness theorems for solutions of nonlinear boundary value problems. Proc Symp Appl Math 17:24–49
Omrani K, Abidi F, Achouri T (2008) A new conservative finite difference scheme for the Rosenau equation. Appl Math Comput 201:35–43
Achouri T (2019) Conservative finite difference scheme for the nonlinear fourth-order wave equation. Appl Math Comput 359:121–131
Sun Z, Zhu Q (1998) On Tsertsvadze’s difference scheme for the Kuramoto–Tsuzuki equation. J Comput Appl Math 98(2):289–304
Rouatbi A, Omrani K (2017) Two conservative difference schemes for a model of nonlinear dispersive equations. Chaos Soliton Fract 104:516–530
Thomee V, Murthy A (1998) A numerical method for the Benjamin–Ono equation. BIT Numer Math 38:597–611
Ak T, Dhawan S, Inan B (2018) Numerical solutions of the generalized Rosenau–Kawahara–RLW equation arising in fluid mechanics via B-spline collocation method. Int J Mod Phys C. https://doi.org/10.1142/S0129183118501164
Acknowledgements
The first two authors were supported in part by Fujian Province Science Foundation for Middle-aged and Young Teachers (no. JAT190368). The authors would like to thank the anonymous reviewers for their valuable suggestions which improve the quality of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wang, X., Cheng, H. & Dai, W. Conservative and fourth-order compact difference schemes for the generalized Rosenau–Kawahara–RLW equation. Engineering with Computers 38, 1491–1514 (2022). https://doi.org/10.1007/s00366-020-01113-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-020-01113-9