
Abstract
We study the asymptotic behavior of solutions of the fourth Painlevé equation as the independent variable goes to infinity in its space of (complex) initial values, which is a generalization of phase space described by Okamoto. We show that the limit set of each solution is compact and connected and, moreover, that any solution that is not rational has an infinite number of poles and infinite number of zeros.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
We study the dynamics of solutions of the fourth Painlevé equation
where \(y=y(x)\) is a function of \(x\in \mathbb {C}\), and \(\alpha ,\beta \) complex constants, in the singular limit as \(|x|\rightarrow \infty \) in the space of initial values, a generalization of phase space first constructed in [15]. In this paper, we prove that each nonrational transcendental solution of \(\mathrm {P}_{\mathrm {IV}}\) has infinitely many zeros and poles in \(\mathbb C\) (see Theorem 3).
We start by transforming \(\mathrm {P}_{\mathrm {IV}}\) to new coordinates that make the study of the limit \(|x|\rightarrow \infty \) more explicit. The proof contains three ingredients: (i) the resolution of singularities of the Painlevé vector field in the space of initial values; (ii) an analytic study of the flow of the Painlevé vector field close to the exceptional lines in the resolved space; and (iii) construction of the complex limit set of each solution. Using (i) and (ii), we prove that a certain set, called the infinity set, acts as a repeller of the Painlevé flow in Okamoto’s space as \(|x|\rightarrow \infty \) (see Theorem 1). Based on the estimates in the proof of this result, we show that the limit set of solutions is nonempty, compact, connected, and invariant under the flow of the associated autonomous system (see Theorem 2). Then by showing that the flow intersects infinitely often with the last three exceptional lines in the space of initial values, we prove Theorem 3. Earlier papers by one of us provided analogous results for the first and second Painlevé equations [5, 9].
The fourth Painlevé equation has been studied from various perspectives: see, e.g., [1, 4, 7, 8, 10, 11, 13, 14, 16, 17]. However, the study of asymptotic behaviors in the limit \(|x|\rightarrow \infty \) for \(x\in {\mathbb C}\) appears to be incomplete in the literature. In this paper, we provide global information about the solutions’ limiting behaviors in the complex plane in this singular limit.
In Sect. 2, we decribe the construction of Okamoto’s space of initial values for Eq. (1). Basic steps of the resolution procedure are given there, but details of the calculations appear in Appendix. Section 3 is devoted to the special solutions of the fourth Painlevé equation and their relation with singular curves in the elliptic pencil underlying the autonomous system. Section 4 contains the results on asymptotic behavior of the solutions and contains the proof of Theorem 1, while Sect. 5 provides information about limit sets and contains the proofs of Theorems 2 and 3.
2 Space of Initial Values of \(\mathrm {P}_{\mathrm {IV}}\)
The fourth Painlevé equation (1) is equivalent to the following system:
with \(y=y_1\), \(\alpha =1-\alpha _1-2\alpha _2\), \(\beta =-2\alpha _1^2\). System (2) is Hamiltonian with the following Hamiltonian function:
that is, (2) is equivalent to Hamilton’s equations of motion
The asymptotic behavior of the Painlevé transcendents was first studied by Boutroux [2, 3]. There, for the first Painlevé equation, he made certain change of variables in order to make the asymptotic behaviors more explicit. In the same spirit, we make the following changes of variables for (2):
which transforms the system (2) to
Here and later in this paper, primes denote differentiation with respect to z.
For each \(z\ne 0\) and each \((u_0,v_0)\in \mathbb {C}^2\), there is a unique solution of (4) satisfying the initial conditions \(u(z_0)=u_0\), \(v(z_0)=v_0\). Since the solutions are meromorphic and therefore will become unbounded in neighborhoods of movable poles, it is natural to consider the solutions as maps from \(\mathbb {C}\) to \(\mathbb {CP}^2\). However, for any given \(z_0\ne 0\), infinitely many solutions may pass through certain points in \(\mathbb {CP}^2\). Such points will be called base points in this paper.
To resolve the flow through such points, we need to construct the space of initial conditions (see [6]), where the graph of each solution will represent a separate leaf of the foliation. The spaces of initial conditions for all six Painlevé equations were constructed in [15]. The solutions are separated by resolving (i.e., blowing up) the base points.
In this paper, we explicitly construct such a resolution of the system (4). The details of the calculation can be found in Appendix, and now we describe the main steps in that resolution process.
2.1 Resolution of Singularities
System (4) has no singularities in the affine part of \(\mathbb {CP}^2\). However, at the line \(\mathcal {L}_0\) at the infinity, as calculated in Sect. A.1 (Appendix), the system has three base points: \(b_0\), \(b_1\), \(b_2\), whose coordinates do not depend on z.
In the next step, we construct blow ups at points \(b_0\), \(b_1\), \(b_2\). In the resulting space, we obtain three exceptional lines that we denote by \(\mathcal {L}_1\), \(\mathcal {L}_2\), \(\mathcal {L}_3\), respectively. The induced flow will have one base point on each of these lines; denote them by \(b_3\), \(b_4\), \(b_5\), respectively. These points are also base points for the autonomous system, as their coordinates do not depend on z. See Sect. A.2 (Appendix) for details.
Next, blow ups at points \(b_3\), \(b_4\), \(b_5\) are constructed. The corresponding exceptional lines are \(\mathcal {L}_4\), \(\mathcal {L}_5\), \(\mathcal {L}_6\). On each of these three lines, there is a base point of the flow. We denote them by \(b_6\), \(b_7\), \(b_8\). The coordinates of these points depend on z, and they approach the base points of the autonomous flow as \(z\rightarrow \infty \). See Sect. A.3 (Appendix) for details.
Finally, blow ups at \(b_6\), \(b_7\), \(b_8\) show that there are no new base points. The exceptional lines are denoted by \(\mathcal {L}_7(z)\), \(\mathcal {L}_8(z)\), \(\mathcal {L}_9(z)\).
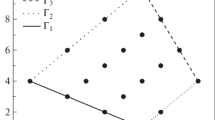
By this procedure, we constructed the fibers \(\mathcal {F}(z)\), \(z\in \mathbb {C}\cup \{\infty \}\setminus \{0\}\) of the Okamoto space \(\mathcal {O}\) for the system (4), see Figure 1. We denote by \(\mathcal {L}_i^*\) the proper preimages of the lines \(\mathcal {L}_i\), \(0\le i\le 6\).

Fiber \(\mathcal {F}(z)\) of the Okamoto space. At the points of \(\mathcal {L}_7(z)\), u has a pole and v a zero; on \(\mathcal {L}_8(z)\), both have poles; and on \(\mathcal {L}_9(z)\), u has a zero and v a pole
The set where the vector field associated to with (2) becomes infinite will be denoted by \(\mathcal {I}=\bigcup _{j=0}^6\mathcal {L}_j^*\).
2.2 The Autonomous System
The fiber \(\mathcal {F}(\infty )\) of the Okamoto space corresponds to the autonomous system obtained by omitting the z-dependent terms in (4):
which is equivalent to
and further to the following family:
The solutions of (5) are thus elliptic funtions.
System (5) is Hamiltonian, i.e.,
where \(E=-uv(u+v+2)\).
Note that \(b_0\), ..., \(b_5\) are base points of (5) as well, while \(b_6\), \(b_7\), \(b_8\) will tend to the base points of the autonomous system as \(z\rightarrow \infty \).
3 The Special Solutions
In this section, we analyze singular cubic curves in the pencil parametrized by solutions of the autonomous system (5) and show that the corresponding solutions of \(\mathrm {P}_{\mathrm {IV}}\) are either rational or given by parabolic cylinder and exponential functions.
3.1 Special Solutions and Singular Cubic Curves
The pencil of elliptic curves arising from the Hamiltonian of the autonomous system (5) is given by the zero set of \(h(u,v)=c+uv(u+v+2)\). For general values of constant c, the corresponding curves will be smooth. To investigate singularities, consider the conditions
which give
The solutions are (0, 0), \((0,-2)\), \((-2,0)\), which lie on the curve corresponding to \(c=0\), and \(\left( -\frac{2}{3},-\frac{2}{3}\right) \) on the curve corresponding to \(c=-\frac{8}{27}\). In other words, there are two singular curves in the pencil, and the first (given by \(c=0\)) contains three singular points, while the second \(\left( \hbox {given by} c=-\frac{8}{27}\right) \) contains one singularity.
Consider first the case \(c=0\). The corresponding curve is \(uv(u+v+2)=0\), which is a singular cubic consisting of three lines: \(u=0\), \(v=0\), and \(u+v+2=0\).
Proposition 1
For (u, v) being a solution of the nonautonomous system (4), each derivative of \(E=-uv(u+v+2)\) with respect to z vanishes if any of the following three sets of conditions is satisfied:
-
1.
\(u=0\) and \(\alpha _1=0\);
-
2.
\(v=0\) and \(\alpha _2=0\);
-
3.
\(u+v+2=0\) and \(\alpha _1+\alpha _2=1\).
Proof
We have:
Case 1 Note that u is a divisor of E, which is polynomial in u and v, and that, when \(\alpha _1=0\), u is also a divisor of \(u'\). By induction, it follows that all derivatives of E will be multiples of u and polynomials of u, v and thus equal to zero for \(u=0\).
Case 2 The proof is analogous to that of Case 1.
Case 3 Note that E is a product of \(u+v+2\) and a polynomial of u, v. For \(\alpha _1+\alpha _2=1\), the derivative of \(u+v+2\) is of the same form:
By induction, the same result as in Cases 1 and 2 will hold for all derivatives of E. \(\square \)
Remark 1
\(\alpha _1=0\) is equivalent to \(\beta =0\), \(\alpha _2=0\) to \(\beta =-2(1-\alpha )^2\), and \(\alpha _1+\alpha _2=1\) to \(\beta =-2(1+\alpha )^2\).
For \(\beta =-2(1+\epsilon \alpha )^2\), \(\epsilon \in \{-1,1\}\), the Painlevé equation (1) is equivalent to the following Riccati equation:
which can be solved in terms of parabolic cylinder and exponential functions:
Note that a zero of \(\phi (x)\) corresponds to a pole of u(z).
For \(\epsilon =1\), which is Case 3 of Proposition 1, v also has a pole; thus each point of \(\mathcal {L}_8^*\) corresponds to a special solution. For \(\epsilon =-1\), which is Case 2 of Proposition 1, v has a zero; thus each point of \(\mathcal {L}_7^*\) corresponds to a special solution. For \(\beta =0\), which is Case 1 of Proposition 1, the solution can be expressed in terms of Hermite polynomials. Each point of \(\mathcal {L}_9^*\) corresponds to such a solution.
Now, consider the case \(c=-\frac{8}{27}\). The corresponding curve is \(uv(u+v+2)=\frac{8}{27}\), and it has a unique singular point \(\left( -\frac{2}{3},-\frac{2}{3}\right) \). For \(\tilde{u}=u+\frac{2}{3}\) and \(\tilde{v}=v+\frac{2}{3}\), the equation of the curve becomes:
thus the curve has an ordinary self-intersection at the singular point. The corresponding solutions are rational.
3.2 Special Rational Solutions of \(\mathrm {P}_{\mathrm {IV}}\)
Consider the following rational solutions of \(\mathrm {P}_{\mathrm {IV}}\):
The corresponding solutions of the system (4) are:
All other rational solutions can be obtained from these solutions by Bäcklund transformations [12]:
which have the following properties:
Also, all special solutions of the fourth Painlevé equation can be obtained by the Bäcklund transformations from the solutions mentioned in Sect. 3.1.
4 The Solutions Near the Infinity Set
In this section, we will study the behavior of the solutions of the system (2) near the set \(\mathcal {I}\), where the vector field associated with the system is infinite.
In Lemmas 1-8 and Theorem 1, we prove that \(\mathcal {I}\) is repelling, i.e., the solutions do not intersect it; and, moreover, each solution approaching sufficiently close to \(\mathcal {I}\) at point z will have a pole in a neighborhood of z.
Lemma 1
For every \(\varepsilon >0\), there exists a neighborhood U of \(\mathcal {L}_0^*\) such that
For each compact subset K of \((\mathcal {L}_1^*\setminus \mathcal {L}_4^*)\cup (\mathcal {L}_2^*\setminus \mathcal {L}_5^*)\cup (\mathcal {L}_3^*\setminus \mathcal {L}_6^*)\), there exists a neighborhood V of K and a constant \(C>0\) such that
Proof
In the charts \((u_{02},v_{02})\) and \((u_{03},v_{03})\) [see “The Affine Charts” (Appendix)], the function
is equal to
The first statement of the lemma follows immediately from these expressions, since \(\mathcal {L}_0^*\) is given by \(u_{02}=0\) and \(u_{03}=0\) in those charts, see Sect. A.1.
Near \(\mathcal {L}_1^*\), in the respective coordinate charts (see Sect. A.2), we have
Since \(\mathcal {L}_4^*\) is given by \(v_{12}=0\), see Sect. A.3, the statement of the lemma is true for the compact sets K contained in a neighborhood of \(\mathcal {L}_1^*\setminus \mathcal {L}_4^*\).
On \(\mathcal {L}_2^*\), (see Sect. A.2), we have
Therefore, since \(\mathcal {L}_5^*\) is given by the equations \(u_{21}=-\frac{1}{2}\) and \(v_{22}=-2\), the statement is true for the compacts contained in a neighborhood of \(\mathcal {L}_2^*\setminus \mathcal {L}_5^*\).
On \(\mathcal {L}_3^*\) (see Sect. A.2), we have
Since \(\mathcal {L}_6\) is given by \(v_{32}=0\), the statement of the lemma is true for the compact sets K contained in a neighborhood of \(\mathcal {L}_3^*\setminus \mathcal {L}_6^*\). \(\square \)
Lemma 2
There exists a continuous complex valued function d on a neighborhood of the infinity set \(\mathcal {I}\) in the Okamoto space, such that
Proof
Assume d is defined by \(\frac{1}{E}\), in a neighborhood of \(\mathcal {I}\setminus (\mathcal {L}_4^*\cup \mathcal {L}_5^*\cup \mathcal {L}_6^*)\). From Sect. A.4, we have that the line \(\mathcal {L}_4^*\) is determined by \(u_{71}=0\) in the \((u_{71},v_{71})\) chart. Thus as we approach \(\mathcal {L}_4^*\), i.e., as \(u_{71}\rightarrow 0\), we have
which provides the second result.
From Sect. A.4, we have that the line \(\mathcal {L}_5^*\) is given by \(v_{82}=0\) in the \((u_{82},v_{82})\) chart. Thus as we approach \(\mathcal {L}_5^*\),
which gives the third result.
From Sect. A.4, we have that the line \(\mathcal {L}_6^*\) is given by \(u_{91}=0\) in the \((u_{91},v_{91})\) chart. Then as we approach \(\mathcal {L}_6\),
which provides the fourth result. \(\square \)
Lemma 3
(Behavior near \(\mathcal {L}_4^*\setminus \mathcal {L}_1^*\)) If a solution at the complex time z is sufficiently close to \(\mathcal {L}_4^*\setminus \mathcal {L}_1^*\), then there exists a unique \(\zeta \in \mathbb {C}\) such that:
-
1.
\(v_{71}(\zeta )=0\), i.e., \((u_{71}(\zeta ), v_{71}(\zeta )) \in \mathcal {L}_7(\zeta )\);
-
2.
\(|z-\zeta |=O(|d(z)||v_{71}(z)|)\) for small d(z) and bounded \(|v_{71}(z)|\).
In other words, the solution has a pole at \(z=\zeta \).
For large \(R_4>0\), consider the set \(\{z\in \mathbb {C}\mid |v_{71}|\le R_4\}\). Then, its connected component containing \(\zeta \) is an approximate disk \(D_{4}\) with centre \(\zeta \) and radius \(|d(\zeta )|R_4\), and \(z\mapsto v_{71}(z)\) is a complex analytic diffeomorphism from that approximate disk onto \(\{v\in \mathbb {C}\mid |v|\le R_4\}\).
Proof
For the study of the solutions near \(\mathcal {L}_4^*\setminus \mathcal {L}_1^*\), we use the coordinates \((u_{71},v_{71})\). In this chart, the line \(\mathcal {L}_4^*\setminus \mathcal {L}_1^*\) is given by the equation \(u_{71}=0\) and parametrized by \(v_{71}\in \mathbb {C}\) (see Sect. A.4). Moreover, \(\mathcal {L}_7^*\) (without one point) is given by \(v_{71}=0\) and parametrized by \(u_{71}\in \mathbb {C}\). (Equivalent arguments in the alternative chart \((u_{72},v_{72})\) cover the missing point of \(\mathcal {L}_7^*\).)
Asymptotically, for \(u_{71}\rightarrow 0\) and bounded \(v_{71}\), 1 / z, we have
Integrating (6c) from \(\zeta \) to z, we get
Hence, using Equation (6b), \(u_{71}\) is approximately equal to a small constant, and from (6a) it follows that
Thus, if z runs over an approximate disk D centered at \(\zeta \) with radius \(|u_{71}|R\), then \(v_{71}\) fills an approximate disk centered at \(v_{71}(\zeta )\) with radius R. Therefore, if \(u_{71}(\zeta )\ll 1/\zeta \), for \(z\in D\), the solution satisfies
and \(v_{71}(z)\) is a complex analytic diffeomorphism from D onto an approximate disk with centre \(v_{71}(\zeta )\) and radius R. If R is sufficiently large, we will have \(0\in v_{71}(D)\); i.e., the solution of the Painlevé equation will have a pole at a unique point in D.
Now, it is possible to take \(\zeta \) to be the pole point. For \(|z-\zeta |\ll |\zeta |\), we have
and
Let \(R_4\) be a large positive real number. Then the equation \(|v_{71}(z)|=R_4\) corresponds to \(|z-\zeta |\sim |d(\zeta )|R_4\), which is still small compared to \(|\zeta |\) if \(|d(\zeta )|\) is sufficiently small. Denote by \(D_4\) the connected component of the set of all \(z\in \mathbb {C}\) such that \(\{z\mid |v_{71}(z)|\le R_4\}\) is an approximate disk with center \(\zeta \) and radius \(|d(\zeta )|R_4\).
More precisely, \(v_{71}\) is a complex analytic diffeomorphism from \(D_4\) onto \(\{v\in \mathbb {C}\mid |v|\le R_4\}\), and
The function E(z) has a simple pole at \(z=\zeta \). From (6d), we have
that is, when
We assume \(R_4\gg \frac{1}{|\zeta |}\), and, therefore, we have
Thus \(E(z)J_{71}(z)\sim 1\) for the annular disk \(z\in D_4\setminus D_4'\), where \(D_4'\) is a disk centered at \(\zeta \) with small radius compared to the radius of \(D_4\). \(\square \)
Lemma 4
(Behavior near \(\mathcal {L}_1^*\setminus \mathcal {L}_0^*\)) For large finite \(R_1>0\), consider the set of all \(z\in \mathbb {C}\) such that the solution at complex time z is close to \(\mathcal {L}_1^*\setminus \mathcal {L}_0^*\), with \(|v_{41}(z)|\le R_1\), but not close to \(\mathcal {L}_4^*\). Then this set is the complement of \(D_4\) in an approximate disk \(D_1\) with center at \(\zeta \) and radius \(\sim \sqrt{|d(\zeta )|R_1}\). More precisely, \(z\mapsto v_{41}\) defines a 2-fold covering from the annular domain \(D_1\setminus D_4\) onto the complement in \(\{u\in \mathbb {C}\mid |u|\le R_1\}\) of an approximate disk with center at the origin and small radius \(\sim |d(\zeta )|R_4^2\), where \(v_{41}(z)\sim -d(\zeta )(z-\zeta )^2\).
Proof
Set \(\mathcal {L}_1^*\setminus \mathcal {L}_0^*\) is visible in the chart \((u_{41},v_{41})\), where it is given by the equation \(u_{41}=0\) and parametrized by \(v_{41}\in \mathbb {C}\), see Sect. A.3. In that chart, the line \(\mathcal {L}_4^*\) (without one point) is given by the equation \(v_{41}=0\) and parametrized by \(u_{41}\in \mathbb {C}\).
For \(u_{41}\rightarrow 0\) and bounded \(v_{41}\) and 1 / z, we have:
Integrating from \(z_0\) to \(z_1\), we obtain
Therefore \(E(z_1)/E(z_0)\sim 1\), if for all z on the segment from \(z_0\) to \(z_1\) we have \(|z-z_0|\ll |z_0|\) and \(|u_{41}(z)|\ll |z_0|\). We choose \(z_0\) on the boundary of \(D_4\) from the proof of Lemma 3. Then we have
which implies that
Furthermore, Eqs. (7c) and (7d) imply that
which is small when \(|d(\zeta )|\) is sufficiently small.
Since \(D_4\) is an approximate disk with center \(\zeta \) and small radius approximately equal to \(|d(\zeta )|R_4\), and \(R_4\gg |\zeta |^{-1}\), we have that \(|v_{71}(z)|\ge R_4\gg 1\). Writing \(z=\zeta +r(z_0-\zeta ),\ r\ge 1\), where \(r\ge 1\), we have \(u_{41}(z)\ll 1\) and
Then Eqs. (7c), (7d), and \(E\sim d(\zeta )^{-1}\) yield
which in combination with (7b) leads to
Hence, we get
and therefore
For large finite \(R_1>0\), the equation \(|v_{41}|=R_1\) corresponds to \(|z-z_0|\sim \sqrt{|d(\zeta )|R_1}\), which is still small compared to \(|z_0|\sim |\zeta |\), and therefore \(|z-\zeta |\le |z-z_0|+|z_0-\zeta |\ll |\zeta |.\) This proves the statement of the lemma. \(\square \)
Lemma 5
(Behaviour near \(\mathcal {L}_5^*\setminus \mathcal {L}_2^*\)) If a solution at the complex time z is sufficiently close to \(\mathcal {L}_5^*\setminus \mathcal {L}_2^*\), then there exists a unique \(\zeta \in \mathbb {C}\) such that:
-
1.
\(u_{82}(\zeta )=0\), i.e., \((u_{82}(\zeta ), v_{82}(\zeta )) \in \mathcal {L}_8(\zeta )\);
-
2.
\(|z-\zeta |=O(|d(z)||u_{82}(z)|)\) for small d(z) and limited \(|u_{82}(z)|\).
In other words, the solution has a pole at \(z=\zeta \).
For large \(R_5>0\), consider the set \(\{z\in \mathbb {C}\mid |u_{82}|\le R_5\}\). Then, its connected component containing \(\zeta \) is an approximate disk \(D_{5}\) with center \(\zeta \) and radius \(|d(\zeta )|R_5\), and \(z\mapsto u_{82}(z)\) is a complex analytic diffeomorphism from that approximate disk onto \(\{u\in \mathbb {C}\mid |u|\le R_5\}\).
Proof
For the study of solutions near \(\mathcal {L}_5^*\setminus \mathcal {L}_2^*\), we use the coordinates \((u_{82},v_{82})\). The line \(\mathcal {L}_5^*\setminus \mathcal {L}_2^*\) is given by the equation \(v_{82}=0\) and parametrized by \(u_{82}\in \mathbb {C}\); see Sect. A.4. Moreover, \(\mathcal {L}_8(z)\) (without one point), is given by \(u_{82}=0\) and parametrized by \(v_{82}\in \mathbb {C}\). Asymptotically, for \(v_{82}\rightarrow 0\) and bounded \(u_{82}\), 1 / z, we have:
Integrating (8c) from \(\zeta \) to z, we get
where \(\tilde{\zeta }\) is on the integration path.
Because of (8b), \(v_{82}\) is approximately equal to a small constant, and from (8a) follows that
Thus, if z runs over an approximate disk D centered at \(\zeta \) with radius \(\frac{1}{8}|v_{82}|R\), then \(u_{82}\) fills an approximate disk centered at \(u_{82}(\zeta )\) with radius R. Therefore, if \(v_{82}(\zeta )\ll \zeta \), the solution has the following properties for \(z\in D\):
and \(u_{82}\) is a complex analytic diffeomorphism from D onto an approximate disk with center \(u_{82}(\zeta )\) and radius R. If R is sufficiently large, we will have \(0\in u_{82}(D)\); i.e., the solution of the Painlevé equation will have a pole at a unique point in D.
Now, it is possible to take \(\zeta \) to be the pole point. For \(|z-\zeta |\ll |\zeta |\), we have
Let \(R_5\) be a large positive real number. Then the equation \(|u_{82}(z)|=R_5\) corresponds to \(|z-\zeta |\sim 2|d(\zeta )|R_5\), which is still small compared to \(|\zeta |\) if \(|d(\zeta )|\) is sufficiently small. Denote by \(D_5\) the connected component of the set of all \(z\in \mathbb {C}\) such that \(\{z\mid |u_{82}(z)|\le R_5\}\) is an approximate disk with center \(\zeta \) and radius \(2|d(\zeta )|R_5\). More precisely, \(u_{82}\) is a complex analytic diffeomorphism from \(D_5\) onto \(\{u\in \mathbb {C}\mid |u|\le R_5\}\), and
The function E(z) has a simple pole at \(z=\zeta \). From (8d), we have
that is, when \(|z-\zeta |\gg \frac{|d(\zeta )|}{|\zeta |}\).
Since \(R_5\ll {1}/{|\zeta |}\), the approximate radius of \(D_5\) is given by
Thus \(E(z)J_{82}(z)\sim 2\) for \(z\in D_5\setminus D_5'\), where \(D_5'\) is a disk centered at \(\zeta \) with small radius compared to the radius of \(D_5\). \(\square \)
Lemma 6
(Behavior near \(\mathcal {L}_2^*\setminus \mathcal {L}_0^*\)) For large finite \(R_2>0\), consider the set of all \(z\in \mathbb {C}\) such that the solution at complex time z is close to \(\mathcal {L}_2^*\setminus \mathcal {L}_0^*\), with \(|u_{52}(z)|\le R_2\), but not close to \(\mathcal {L}_5^*\). Then that set is the complement of \(D_5\) in an approximate disk \(D_2\) with center at \(\zeta \) and radius \(\sim \sqrt{|d(\zeta )|R_2}\). More precisely, \(z\mapsto u_{52}\) defines a 2-fold covering from the annular domain \(D_2\setminus D_5\) onto the complement in \(\{u\in \mathbb {C}\mid |u|\le R_2\}\) of an approximate disk with center at the origin and small radius \(\sim |d(\zeta )|R_5^2\), where \(u_{52}(z)\sim -d(\zeta )(z-\zeta )^2\).
Proof
The line \(\mathcal {L}_2^*\) is visible in the coordinate system \((u_{52},v_{52})\), where it is given by the equation \(v_{52}=0\) and parametrized by \(u_{52}\in \mathbb {C}\); see Sect. A.3. In that chart, line \(\mathcal {L}_5^*\) without one point is given by the equation \(u_{52}=0\) and parametrized by \(v_{52}\in \mathbb {C}\), while the line \(\mathcal {L}_0^*\) without one point is given by the equation \(u_{52}=\frac{1}{2}\) and also parametrized by \(v_{52}\in \mathbb {C}\). For \(v_{52}\rightarrow 0\) and bounded \(u_{52}\) and 1 / z, we have:
We introduce the following coordinate change for convenience in order to make \(\mathcal {L}_0^*\) invisible in the chart:
Now, in the \((\tilde{u}_{52},v_{52})\) coordinate system, \(\mathcal {L}_2^*\setminus \mathcal {L}_0^*\) is given by the equation \(v_{52}=0\) and parametrized by \(\tilde{u}_{52}\in \mathbb {C}\), while the line \(\mathcal {L}_5^*\) without one point is given by the equation \(\tilde{u}_{52}=0\) and parametrized by \(v_{52}\in \mathbb {C}\).
For \(v_{52}\rightarrow 0\) and bounded \(\tilde{u}_{52}\) and \(\frac{1}{z}\), we have:
We also have
Integrating from \(z_0\) to \(z_1\), we obtain
Therefore \(E(z_1)/E(z_0)\sim 1\) if for all z on the segment from \(z_0\) to \(z_1\) we have \(|z-z_0|\ll |z_0|\) and \(|v_{52}(z)|\ll |z_0|\), \(|\tilde{u}_{52}(z)|\ll |z_0|\). We choose \(z_0\) on the boundary of \(D_5\) from the proof of Lemma 5. Then we have
which implies that
Furthermore, Eqs. (9c) and (9d) imply that
which is small when \(|d(\zeta )|\) is sufficiently small.
Since \(D_5\) is an approximate disk with center \(\zeta \) and small radius \(\sim |d(\zeta )|R_5\), and \(R_5\gg |\zeta |^{-1}\), we have that \(|u_{82}(z)|\ge R_5\gg 1\); hence
and
Then equations (9c), (9d), and \(E\sim d(\zeta )^{-1}\) yield
which in combination with (7b) leads to
hence
and therefore
For large finite \(R_2>0\), the equation \(|\tilde{u}_{52}|=R_2\) corresponds to \(|z-z_0|\sim \sqrt{|d(\zeta )R_2}\), which is still small compared to \(|z_0|\sim |\zeta |\), and therefore \(|z-\zeta |\le |z-z_0|+|z_0-\zeta |\ll |\zeta |.\) This proves the statement of the lemma. \(\square \)
Lemma 7
(Behavior near \(\mathcal {L}_6^*\setminus \mathcal {L}_3^*\)) If a solution at the complex time z is sufficiently close to \(\mathcal {L}_6^*\setminus \mathcal {L}_3^*\), then there exists a unique \(\zeta \in \mathbb {C}\) such that:
-
1.
\(v_{91}(\zeta )=0\), i.e., \((u_{91}(\zeta ),v_{91}(\zeta )) \in \mathcal {L}_9(\zeta )\);
-
2.
\(|z-\zeta |=O(|d(z)||v_{91}(z)|)\) for small d(z) and limited \(|v_{91}(z)|\).
In other words, the solution has a pole at \(z=\zeta \).
For large \(R_6>0\), consider the set \(\{z\in \mathbb {C}\mid |v_{91}|\le R_6\}\). Then, its connected component containing \(\zeta \) is an approximate disk \(D_{6}\) with center \(\zeta \) and radius \(|d(\zeta )|R_6\), and \(z\mapsto v_{91}(z)\) is a complex analytic diffeomorphism from that approximate disk onto \(\{v\in \mathbb {C}\mid |v|\le R_6\}\).
Proof
Line \(\mathcal {L}_6^*\setminus \mathcal {L}_3^*\) is given by the equation \(u_{91}=0\) and parametrized by \(v_{91}\in \mathbb {C}\), see Sect. A.4. Moreover, \(\mathcal {L}_9\) (without one point), is given by \(v_{91}=0\) and parametrized by \(u_{91}\in \mathbb {C}\). For the study of the solutions near \(\mathcal {L}_6^*\setminus \mathcal {L}_3^*\), we use the coordinates \((u_{91},v_{91})\). Asymptotically, for \(u_{91}\rightarrow 0\) and bounded \(v_{91}\), 1 / z, we have:
Notice that these equations are analogous to (6a)–(6d), thus the remainder of the proof is similar to that provided for Lemma 3. \(\square \)
Lemma 8
(Behavior near \(\mathcal {L}_3^*\setminus \mathcal {L}_0^*\)) For large finite \(R_3>0\), consider the set of all \(z\in \mathbb {C}\) such that the solution at complex time z is close to \(\mathcal {L}_3^*\setminus \mathcal {L}_0^*\), with \(|v_{61}(z)|\le R_1\), but not close to \(\mathcal {L}_6^*\). Then the connected component of that set containing \(\zeta \) is the complement of \(D_6\) in an approximate disk \(D_3\) with center at \(\zeta \) and radius \(\sim \sqrt{|d(\zeta )|R_3}\). More precisely, \(z\mapsto v_{61}\) defines a 2-fold covering from the annular domain \(D_3\setminus D_6\) onto the complement in \(\{u\in \mathbb {C}\mid |u|\le R_3\}\) of an approximate disk with center at the origin and small radius \(\sim |d(\zeta )|R_6^2\), where \(v_{61}(z)\sim -d(\zeta )(z-\zeta )^2\).
Proof
The line \(\mathcal {L}_3^*\setminus \mathcal {L}_0^*\) is visible in the coordinate system \((u_{61},v_{61})\), where it is given by the equation \(u_{61}=0\) and parametrized by \(v_{61}\in \mathbb {C}\); see Sect. A.3. In that chart, the line \(\mathcal {L}_6^*\) (without one point) is given by the equation \(v_{61}=0\) and parametrized by \(u_{61}\in \mathbb {C}\).
For \(u_{61}\rightarrow 0\) and bounded \(v_{61}\) and 1 / z, we have:
Notice that these equations are analogous to (7a)–(7e). Therefore, the remainder of the proof is similar to that provided for Lemma 4. \(\square \)
Theorem 1
Let \(\varepsilon _1\), \(\varepsilon _2\), \(\varepsilon _3\) be given such that \(\varepsilon _1>0\), \(0<\varepsilon _2<\frac{3}{2}\), \(0<\varepsilon _3<1\). Then there exists \(\delta >0\) such that if \(|z_0|>\varepsilon _1\) and \(|d(z_0)|<\delta \), then
satisfies:
-
1.
\(\delta \ge |d(z_0)|\left( \dfrac{\rho }{|z_0|}\right) ^{3/2-\varepsilon _2}(1-\varepsilon _3)\);
-
2.
if \(|z_0|\le |z|\le \rho \), then \(d(z)=d(z_0)\left( \dfrac{z}{z_0}\right) ^{3/2+\varepsilon _2(z)}(1+\varepsilon _3(z))\);
-
3.
if \(|z|\ge \rho \), then \(d(z)\ge \delta (1-\varepsilon _3)\).
Proof
Suppose a solution of the system (4) is close to \(\mathcal {L}_0^*\) at times \(z_0\) and \(z_1\). It follows from Lemmas 3-8 that for every solution close to \(\mathcal {I}\), the set of complex times z such that the solution is not close to \(\mathcal {L}_0^*\) is the union of approximate disks of radius \(\sim |d|^{1/2}\). Hence if the solution is near \(\mathcal {I}\) for all complex times z such that \(|z_0|\le |z|\le |z_1|\), then there exists a path \(\gamma \) from \(z_0\) to \(z_1\) such that the solution is close to \(\mathcal {L}_0\) for all \(z\in \gamma \) and \(\gamma \) is \(C^1\)-close to the path: \(t\mapsto z_1^tz_0^{1-t}\), \(t\in [0,1]\),
Then Lemma 1 implies that
therefore,
and
From Lemmas 3-8 we then have that, as long as the solution is close to \(\mathcal {I}\), as it moves into a neighborhood of \(\mathcal {L}_4^*\setminus \mathcal {L}_1^*\), \(\mathcal {L}_5^*\setminus \mathcal {L}_2^*\), \(\mathcal {L}_6^*\setminus \mathcal {L}_3^*\), the ratio of d remains close to 1.
For the first statement of the theorem, we have
and so
The second statement follows from (10), while the third follows by the assumption on z.\(\square \)
5 The Limit Set
In this section, we define and consider properties of the limit sets of solutions. In Theorem 2, we prove that there is a compact set \(K\subset \mathcal {F}(\infty )\) such that the limit sets of all solutions of (2) are contained in K and that the limit set of any solution is nonempty, compact, connected, and invariant under the flow of the autonomous system (5). These results lead us to Theorem 3, i.e., that each nonrational solution of the fourth Painlevé equation has infinitely many zeros and poles.
Theorem 2
There exists a compact subset K of \(\mathcal {F}(\infty )\setminus \mathcal {I}(\infty )\) such that the limit set \({\varOmega }_{(u,v)}\) of any solution (u, v) is contained in K. Moreover, \({\varOmega }_{(u,v)}\) is a nonempty, compact, and connected set, which is invariant under the flow of the autonomous system (5).
Proof
For any positive numbers \(\delta \), r, let \(K_{\delta ,r}\) denote the set of all \(s\in \mathcal {F}(z)\) such that \(|z|\ge r\) and \(|d(s)|\ge \delta \). Since \(\mathcal {F}(z)\) is a complex analytic family over \(\mathbb {P}^1\setminus \{0\}\) of compact surfaces \(\mathcal {F}(z)\), \(K_{\delta ,r}\) is also compact. Furthermore, \(K_{\delta ,r}\) is disjoint from the union of the infinity sets \(\mathcal {I}(z)\), \(z\in \mathbb {P}^1\setminus \{0\}\), and therefore \(K_{\delta ,r}\) is a compact subset of Okamoto’s space \(\mathcal {O}\setminus \mathcal {F}(\infty )\). When r grows to infinity, the sets \(K_{\delta ,r}\) shrink to the set
which is compact.
It follows from Theorem 1 that there exists \(\delta >0\) such that for every solution (u, v) there exists \(r_0>0\) with the following property:
Hereafter, we take \(r\ge r_0\), when it follows that \((u(z),v(z))\in K_{\delta ,r}\) whenever \(|z|\ge r\). Let \(Z_r=\{z\in \mathbb {C}\mid |z|\ge r\}\), and let \({\varOmega }_{(u,v),r}\) denote the closure of \((u,v)(Z_r)\) in \(\mathcal {O}\). Since \(Z_r\) is connected and (u, v) is continuous, \({\varOmega }_{(u,v),r}\) is also connected. Since \((u,v)(Z_r)\) is contained in the compact subset \(K_{\delta ,r}\), its closure \({\varOmega }_{(u,v),r}\) is also contained in \(K_{\delta ,r}\), and therefore \({\varOmega }_{(u,v),r}\) is a nonempty compact and connected subset of \(\mathcal {O}\setminus \mathcal {F}(\infty )\). The intersection of a decreasing sequence of nonempty, compact, and connected sets is nonempty, compact, and connected: therefore, as \({\varOmega }_{(u,v),r}\) decrease to \({\varOmega }_{(u,v)}\) when r grows to infinity, it follows that \({\varOmega }_{(u,v)}\) is a nonempty, compact, and connected set of \(\mathcal {O}\). Since \({\varOmega }_{(u,v),r}\subset K_{\delta ,r}\) for all \(r\ge r_0\), and the sets \(K_{\delta ,r}\) shrink to the compact subset \(K_{\delta ,\infty }\) of \(\mathcal {F}(\infty )\setminus \mathcal {I}(\infty )\) as r grows to infinity, it follows that \({\varOmega }_{(u,v)}\subset K_{\delta ,\infty }\). This proves the first statement of the theorem with \(K=K_{\delta ,\infty }\).
Since \({\varOmega }_{(u,v)}\) is the intersection of the decreasing family of compact sets \({\varOmega }_{(u,v),r}\), there exists for every neighborhood A of \({\varOmega }_{(u,v)}\) in \(\mathcal {O}\) an \(r>0\) such that \({\varOmega }_{(u,v),r}\subset A\), hence \((u(z),v(z))\in A\) for every \(z\in \mathbb {C}\) such that \(|z|\ge r\). If \(z_j\) is any sequence in \(\mathbb {C}\setminus \{0\}\) such that \(|z_j|\rightarrow \infty \), then the compactness of \(K_{\delta ,r}\), in combination with \((u,v)Z_r\subset K_{\delta ,r}\), implies that there is a subsequence \(j=j(k)\rightarrow \infty \) as \(k\rightarrow \infty \) and an \(s\in K_{\delta ,r}\) such that
Then it follows that \(s\in {\varOmega }_{(u,v)}\).
Next, we prove that \({\varOmega }_{(u,v)}\) is invariant under the flow \({\varPhi }^t\) of the autonomous Hamiltonian system. Let \(s\in {\varOmega }_{(u,v)}\) and \(z_j\) be a sequence in \(\mathbb {C}\setminus \{0\}\) such that \(z_j\rightarrow \infty \) and \((u(z_j),v(z_j))\rightarrow s\). Since the z-dependent vector field of the Butroux–Painlevé system converges in \(C^1\) to the vector field of the autonomous Hamiltonian system as \(z\rightarrow \infty \), it follows from the continuous dependence on initial data and parameters that the distance between \((u(z_j+t),v(z_j+t))\) and \({\varPhi }^t(u(z_j),v(z_j))\) converges to zero as \(j\rightarrow \infty \). Since \({\varPhi }^t(u(z_j),v(z_j))\rightarrow {\varPhi }^t(s)\) and \(z_j\rightarrow \infty \) as \(j\rightarrow \infty \), it follows that \((u(z_j+t),v(z_j+t))\rightarrow {\varPhi }^t(s)\) and \(z_j+t\rightarrow \infty \) as \(j\rightarrow \infty \), hence \({\varPhi }^t(s)\in {\varOmega }_{(u,v)}\).
\(\square \)
Proposition 2
Every nonspecial solution (u(z), v(z)) intersects each of the pole lines \(\mathcal {L}_7\), \(\mathcal {L}_8\), \(\mathcal {L}_9\) infinitely many times.
Proof
First, suppose that a solution (u(z), v(z)) intersects the union \(\mathcal {L}_7\cup \mathcal {L}_8\cup \mathcal {L}_9\) only finitely many times.
According to Theorem 2, the limit set \({\varOmega }_{(u,v)}\) is a compact set in \(\mathcal {F}(\infty )\setminus \mathcal {I}(\infty )\). If \({\varOmega }_{(u,v)}\) intersects one the three pole lines \(\mathcal {L}_7\), \(\mathcal {L}_8\), \(\mathcal {L}_9\) at a point p, then there exists arbitrarily large z such that (u(z), v(z)) is arbitrarily close to p when the transversality of the vector field to the pole line implies that \((u(\zeta ),v(\zeta ))\in \mathcal {L}_7\cup \mathcal {L}_8\cup \mathcal {L}_9\) for a unique \(\zeta \) near z. As this would imply that (u(z), v(z)) intersects \(\mathcal {L}_7\cup \mathcal {L}_8\cup \mathcal {L}_9\) infinitely many times, it follows that \({\varOmega }_{(u,v)}\) is a compact subset of \(\mathcal {F}(\infty )\setminus (\mathcal {I}({\infty })\cup \mathcal {L}_7({\infty })\cup \mathcal {L}_8({\infty })\cup \mathcal {L}_9({\infty }))\). However, \(\mathcal {L}_7({\infty })\cup \mathcal {L}_8({\infty })\cup \mathcal {L}_9({\infty })\) is equal to the set of all points in \(\mathcal {F}(\infty )\setminus \mathcal {I}(\infty )\) that project to the line \(\mathcal {L}_0\), and therefore \(\mathcal {F}(\infty )\setminus (\mathcal {I}({\infty })\cup \mathcal {L}_7({\infty })\cup \mathcal {L}_8({\infty })\cup \mathcal {L}_9({\infty }))\) is the affine (u, v) coordinate chart, of which \({\varOmega }_{(u,v)}\) is a compact subset, which implies that u(z) and v(z) remain bounded for large |z|. It follows from boundedness of u and v that u(z) and v(z) are equal to holomorphic functions of 1 / z in a neighborhood of \(z=\infty \), which implies that there are complex numbers \(u(\infty )\), \(v(\infty )\) that are the limit points of u(z) and v(z) as \(|z|\rightarrow \infty \). In other words, \({\varOmega }_{(u,v)}=\{(u(\infty ),v(\infty ))\}\) is a one point set. That means that that the solution is analytic at infinity; i.e., it is analytic on the whole \(\mathbb {CP}^1\), thus it must be rational.
Since the limit set \({\varOmega }_{(u,v)}\) is invariant under the autonomous flow, it means that it will contain the whole irreducible component of a cubic curve: \( -uv(u+v+2)=c, \) for some constant c. As shown in Sect. 3, such a curve is reducible for \(c=0\), and the special solutions correspond to each of the irreducible components. In all other cases, all three base points \(b_0\), \(b_1\), \(b_2\) on the line \(\mathcal {L}_0\) will be contained in the limit set, which are projections of the pole lines \(\mathcal {L}_7(\infty )\), \(\mathcal {L}_8(\infty )\), \(\mathcal {L}_9(\infty )\), respectively. Thus, a nonspecial solution will intersect each of them infinitely many times. \(\square \)
Remark 2
The limit set \({\varOmega }_{(u,v)}\) is invariant under the autonomous Hamiltonian system. If it contains only one point, as we obtained in the proof of Theorem 2, that point must be an equilibrium point of the autonomous Hamiltonian system (5); that is,
These are limiting values of the rational solutions, see Sect. 3.2.
Theorem 3
Every nonspecial solution of the fourth Painlevé equation (1) has infinitely many poles and infinitely many zeros.
Proof
It is enough to prove that a nonspecial solution u of (4) has infinitely many poles and zeros. Notice that at the intersection point with \(\mathcal {L}_7\), u has a pole and v a zero; at the intersection with \(\mathcal {L}_8\), both have poles, and on \(\mathcal {L}_9\), u has a zero and v a pole. Since it is shown in Proposition 2 that (u, v) intersects each of the lines \(\mathcal {L}_7\), \(\mathcal {L}_8\), \(\mathcal {L}_9\) infinitely many times, the statement is proved. \(\square \)
References
Bassom, A.P., Clarkson, P.A., Hicks, A.C.: Numerical studes of the fourth Painlevé equation. IMA J. Appl. Math. 50, 167–193 (1993)
Boutroux, P.: Recherches sur les transcendantes de M. Painlevé et l’étude asymptotique des équations différentielles du second ordre. Ann. Sci. École Norm. Sup. (3) 30, 255–375 (1913)
Boutroux, P.: Recherches sur les transcendantes de M. Painlevé et l’étude asymptotique des équations différentielles du second ordre (suite). Ann. Sci. École Norm. Sup. (3) 31, 99–159 (1914)
Clarkson, P.A.: The fourth Painlevé equation and associated special polynomials. J. Math. Phys. 44(11), 5350–5374 (2003)
Duistermaat, J.J., Joshi, N.: Okamoto’s space for the first Painlevé equation in Boutroux coordinates. Arch. Ratl. Mech. Anal. 202, 707–785 (2011)
Gerard, R.: Geometric theory of differential equations in the complex domain. In: Complex analysis and its applications (Lectures, Internat. Sem., Trieste, 1975), Vol. II, pp. 269–308. Internat. Atomic Energy Agency, Vienna (1976)
Gordoa, P.R., Joshi, N., Pickering, A.: Bäcklund transformations for fourth Painlevé hierarchies. J. Differ. Equ. 217, 124–153 (2005)
Gordoa, P.R., Joshi, N., Pickering, A.: Second and fourth Painlevé hierarchies and Jimbo-Miwa linear problems. J. Math. Phys. 47(7), 07350416 (2006)
Howes, P., Joshi, N.: Global asymptotics of the second Painlevé equation in Okamoto’s space. Constr. Approx. 39(1), 11–41 (2014)
Matano, T., Matumiya, A., Takano, K.: On some Hamiltonian structures of Painlevé systems, II. J. Math. Soc. Jpn. 51(4), 843–866 (1999)
Nagloo, J., Pillay, A.: On the algebraic independence of generic Painlevé transcendents. Compos. Math. 150, 668–678 (2014)
Noumi, M.: Painlevé equations through symmetry, Translations of Mathematical Monographs, vol. 223. American Mathematical Society, Providence, RI (2004). Translated from the 2000 Japanese original by the author
Noumi, M., Okamoto, K.: Irreducibility of the second and the fourth Painlevé equations. Funkcial. Ekvac. 40(1), 139–163 (1997)
Noumi, M., Yamada, Y.: Symmetries in the fourth Painlevé equation and Okamoto polynomials. Nagoya Math. J. 153, 53–86 (1999)
Okamoto, K.: Sur les fuilletages associés aux équation du second ordre á points critiques fixes de P. Painlevé. Jpn. J. Math. 5(1), 1–79 (1979)
Okamoto, K.: Studies on the Painlevé equations. iii. second and fourth Painlevé equations, \(p_{\text{ II }}\) and \(p_{\text{ IV }}\). Math. Ann. 275(2), 221–255 (1986)
Stoyanova, T.: Non-integrability of the fourth Painlevé equation in the Liouville-Arnold sense. Nonlinearity 27(5), 1029–1044 (2014)
Acknowledgments
The research reported in this paper was supported by Grant No. FL120100094 from the Australian Research Council. The work of M.R. was partially supported by Project No. 174020: Geometry and Topology of Manifolds, Classical Mechanics and Integrable Dynamical Systems of the Serbian Ministry of Education, Science and Technological Development. The authors are grateful to the referee for comments and questions, which led to improvement of the manuscript. M.R. thanks Viktoria Heu for useful discussions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Percy A. Deift.
M. Radnović: On leave from Mathematical Institute SANU, Belgrade, Serbia.
Appendix: Resolution of the Painlevé Vector Field
Appendix: Resolution of the Painlevé Vector Field
1.1 The Affine Charts
1.1.1 Affine Chart \((u_{01}, v_{01})\)
The first affine chart is defined by the original coordinates
1.1.2 Affine Chart \((u_{02}, v_{02})\)
The second affine chart is given by the following coordinates:
The line at infinity is \(\mathcal {L}_0: u_{02}=0\).
The Painlevé vector field is given by
which contain base points at
The energy is

1.1.3 Affine Chart \((u_{03}, v_{03})\)
We have the coordinates
and the line at infinity is given by \(\mathcal {L}_0: u_{03}=0\).
The flow is given by
which contains base points at
and \((u_{03}=0,v_{03}=-1)\), which is \(b_1\).
The energy is given by
1.2 Resolution at Base Points \(b_0\), \(b_1\), \(b_2\)
1.2.1 Resolution at \(b_0\)
The first chart is given by the coordinate change:
The exceptional line is \(\mathcal {L}_1:v_{11}=0\). The preimage of line \(\mathcal {L}_0\) is visible in this chart and given by the equation \(u_{11}=0\).
The flow in this chart:
contains no new base points.
The energy is given by

The second chart is given by
The exceptional line is \(\mathcal {L}_1:u_{12}=0\). The preimage of line \(\mathcal {L}_0\) is not visible in this chart.
The flow is
Both the vector field and the anticanonical pencil have base point at
The energy is given by

1.2.2 Resolution at \(b_1\)
The first chart is given by the coordinate change:
The exceptional line is \(\mathcal {L}_2:v_{21}=0\). The preimage of the line \(\mathcal {L}_0\) is visible in this chart and given by the equation \(u_{21}=0\).
The flow is given by
and contains a new base point at
The energy is given by
The second chart is given by
The exceptional line is \(\mathcal {L}_2:u_{22}=0\). The preimage of line \(\mathcal {L}_0\) is not visible in this chart.
The flow is given by
and contains a base point \((u_{22}=0,v_{22}=-2)\), which is \(b_4\).
The energy is given by

1.2.3 Resolution at \(b_2\)
The first chart is given by
The exceptional line is \(\mathcal {L}_3:v_{31}=0\). The preimage of line \(\mathcal {L}_0\) is visible in this chart and given by the equation \(u_{31}=0\).
The flow
contains no base point.
The energy is given by

The second chart is given by
The exceptional line is \(\mathcal {L}_3:u_{32}=0\). The preimage of line \(\mathcal {L}_0\) is not visible in this chart.
The flow is
Both the vector field and the anticanonical pencil have a base point at
The energy is given by

1.3 Resolution at Points \(b_3\), \(b_4\), \(b_5\)
1.3.1 Resolution at \(b_3\)
The first chart is
and the corresponding Jacobian is
The exceptional line is \(\mathcal {L}_4:v_{41}=0\). The preimage of line \(\mathcal {L}_1\) in this chart is \(u_{41}=0\). \(\mathcal {L}_0\) is not visible in this chart.
The flow is given by
and contains a base point:
The energy and related quantities are

The second chart is given by
The exceptional line is \(\mathcal {L}_4:u_{42}=0\). The preimages of \(\mathcal {L}_0\) and \(\mathcal {L}_1\) are not visible in this chart.
The flow is
and contains a base point \((u_{42}=0,v_{42}=\frac{\alpha _2}{z})\), which is \(b_6\).
1.3.2 Resolution at \(b_4\)
The first chart is given by
The exceptional line is \(\mathcal {L}_5:v_{51}=0\). The preimage of \(\mathcal {L}_2\) is not visible in this chart, while the preimage of \(\mathcal {L}_0\) is given by \(u_{51}v_{51}=\frac{1}{2}\).
The flow is given by
and contains a base point
The second chart is
which has Jacobian
The exceptional line is \(\mathcal {L}_5:u_{52}=0\). In this chart, the preimage of \(\mathcal {L}_2\) is given by \(v_{52}=0\), and of \(\mathcal {L}_0\) by \(u_{52}=\frac{1}{2}\).
The flow is given by
which contains a base point \(\left( u_{52}=0, v_{52}={8z}/(1-\alpha _1-\alpha _2)\right) \), which is \(b_7\).
The energy and related quantities are
1.3.3 Resolution at \(b_5\)
The first chart is
The exceptional line is \(\mathcal {L}_6:v_{61}=0\). In this chart, the preimage of \(\mathcal {L}_3\) is given by \(u_{61}=0\), and the preimage of \(\mathcal {L}_0\) is not visible.
The flow is
and contains a base point:
The energy is given by
The second chart is
The exceptional line is \(\mathcal {L}_6:u_{62}=0\). In this chart, the preimages of \(\mathcal {L}_3\) and \(\mathcal {L}_0\) are not visible.
The flow is
and contains a base point is \(u_{62}=0,v_{62}=-\,{\alpha _1}/{z}\), which is \(b_8\).
The energy is given by
1.4 Resolution at Points \(b_6\), \(b_7\), \(b_8\)
1.4.1 Resolution at \(b_6\)
The first chart is
which gives the Jacobian
The exceptional line is \(\mathcal {L}_7:v_{71}=0\). In this chart, the preimage of \(\mathcal {L}_4\) is given by equation \(u_{71}=0\), while the preimages of \(\mathcal {L}_1\) and \(\mathcal {L}_0\) are not visible.
The flow is given by
and contains no base points.
The energy is given by
The second chart is
In this chart, the exceptional line \(\mathcal {L}_7\) is given by equation \(u_{72}=0\), while the preimages of \(\mathcal {L}_4\), \(\mathcal {L}_1\), and \(\mathcal {L}_0\) are not visible.
The flow
contains no base points.
1.4.2 Resolution at \(b_7\)
The first chart is
In this chart, the exceptional line \(\mathcal {L}_8\) is given by equation \(v_{81}=0\), while the preimages of \(\mathcal {L}_5\) and \(\mathcal {L}_2\) are not visible.
The flow is given by
There are no new base points.
The second chart is
In this chart, the exceptional line \(\mathcal {L}_8\) is given by equation \(u_{82}=0\), and the preimage of \(\mathcal {L}_5\) by \(v_{82}=0\). The preimage of \(\mathcal {L}_2\) is not visible.
The Jacobian is
while the derivative of the Jacobian is
The flow is given by
There are no new base points.
The energy is given by
1.4.3 Resolution at \(b_8\)
The first chart is
The exceptional line is \(\mathcal {L}_9:v_{91}=0\). In this chart, the preimage of \(\mathcal {L}_6\) is given by equation \(u_{91}=0\), while the preimages of \(\mathcal {L}_3\) and \(\mathcal {L}_0\) are not visible.
The flow is
and contains no base points.
Energy:
The second chart is
The exceptional line is \(\mathcal {L}_9:u_{92}=0\). In this chart, the preimages of \(\mathcal {L}_6\), \(\mathcal {L}_3\) and \(\mathcal {L}_0\) are not visible.
The flow is given by
and contains no base points.
Rights and permissions
About this article

Cite this article
Joshi, N., Radnović, M. Asymptotic Behavior of the Fourth Painlevé Transcendents in the Space of Initial Values. Constr Approx 44, 195–231 (2016). https://doi.org/10.1007/s00365-016-9329-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00365-016-9329-3
Keywords
- The fourth Painlevé equation
- Asymptotic behavior
- Resolution of singularities
- Rational surface
- Space of initial values