
Abstract
Using the integrability of the sinh-Gordon equation, we demonstrate the spectral stability of its elliptic solutions. With the first three conserved quantities of the sinh-Gordon equation, we construct a Lyapunov functional. By using such Lyapunov functional, we show that these elliptic solutions are orbitally stable with respect to subharmonic perturbations of arbitrary period.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Stability analysis for solutions of partial differential equations (PDEs) plays an important role in many aspects of the physical world, including fluid mechanics (Drazin and Reid 1981), nonlinear optics (Hasegawa 1989) and plasma physics (Chen 1984). The stability of solutions is important for relating mathematical models to applications in science and engineering. If a solution of a mathematical model persists when affected by small perturbations, it is likely observable in the physical world, while unstable solutions are not. In different areas of science and engineering, many important mathematical models have been derived, which do not lend themselves easily to thorough analysis. However, using asymptotic and perturbation methods, one may study a simpler approximate model instead. Stability analysis may be used to examine the dynamics of mathematical solutions and structures even when the dynamical variable is not necessarily a time-like variable: The stability analysis serves to allow an understanding of the space of solutions in the neighborhood of the solution of interest.
Two types of solutions and boundary conditions are extensively studied for nonlinear PDEs: localized solutions that decay at infinity, and periodic solutions. Elliptic solutions are a class of periodic solutions that have found application in the physical world, such as near-shore ocean waves (Wiegel 1960). In this paper, we focus on the stability of elliptic solutions of the integrable sinh-Gordon equation.
In real space-time coordinates, denoted (X, T), the Sinh–Gordon equation reads (Ablowitz 1981; McKean 1981)
where partial derivatives are denoted by subscripts. Passing to light-cone coordinates (x, t), with
the sinh-Gordon equation becomes
The sinh-Gordon equation (1) is rewritten in system form as:
Here, u is a real-valued function. The sinh-Gordon equation arises in the context of particular surfaces of constant mean curvature. The geometrical interpretation of (1) was shown by studying surfaces of constant Gaussian curvature in a three-dimensional pseudo-Riemannian manifold of constant curvature (Chern 1981). It has appeared in differential geometry and various applications. For example, (3) can be used to describe generic properties of string dynamics for strings and multi-strings in constant curvature space (Larsen and Sanchez 1996). Equation (3) is an integrable system and has a self-adjoint Lax pair (Ablowitz 1981). The stability and instability of periodic wave solutions were studied in Natali (2011), where it was shown that the periodic wave solutions are orbitally stable for \((u,p)\in H_{m, p e r}^{1}([0, L]) \times L_{p e r}^{2}([0, L])\), for specific choices of the traveling wave velocity. Here, \(H_{m, p e r}^{1}([0, L])=\left\{ f \in H_{p e r}^{1}([0, L]) ;\frac{1}{L} \int _{0}^{L} f(x) d x=0\right\} \). It is noted that in Natali (2011) the closely related equation \(u_{TT}-u_{XX}-\sinh (u)=0\) is studied and the author obtained a criterion for instability (as well as stability) of periodic waves with respect to the perturbations of the same period. Equation (1) can be viewed as a special case of a nonlinear Klein–Gordon equation. The spectral stability (as well as instability) of periodic wavetrains with respect to localized perturbations for the nonlinear Klein–Gordon equation has been discussed in Jones et al. (2014).
In Natali (2011), only perturbations of the same period are considered and only one type of periodic solution is considered. Moreover, in Jones et al. (2014) no orbital stability result is obtained. In this paper, using the integrability of (1), we show the spectral and orbital stability of elliptic solutions of the sinh-Gordon equation with respect to arbitrary subharmonic perturbations: periodic perturbations having period equal to an integer multiple of the period of the potential solution. The study of the stability of solutions with respect to subharmonic perturbations is important for at least two reasons: (i) For many well-established models, such as the focusing modified KdV equation (Deconinck and Nivala 2011), the focusing NLS equation (Deconinck and Segal 2017) and the sine-Gordon equation (Deconinck et al. 2020), some elliptic solutions are stable with respect to periodic perturbations of the same period, but unstable with respect to subharmonic perturbations (Deconinck and Nivala 2011; Deconinck and Segal 2017; Deconinck et al. 2020; ii) in some physical applications, like ocean wave dynamics, one usually takes into account more larger perturbation classes that are physically justified, and are not restricted to having the same period as the solution. The stability of elliptic solutions with respect to subharmonic perturbations has been investigated for certain integrable PDEs (Bottman et al. 2011; Bottman and Deconinck 2009; Deconinck and Kapitula 2010; Deconinck and Nivala 2011; Deconinck and Upsal 2020; Gallay and Pelinovsky 2020).
Since the sine-Gordon equation and sinh-Gordon equation have a similar form, we need to talk about some differences about their stability analysis. Although the spectral stability and instability of the elliptic solutions to sine-Gordon equation have been studied (Deconinck et al. 2020; Jones et al. 2013), no nonlinear (orbital) stability results were obtained in Deconinck et al. (2020); Jones et al. (2013). Besides, the structure of the linear stability problem in Deconinck et al. (2020); Jones et al. (2013) cannot be used to prove orbital stability here. To get the orbital stability result, we need to ensure that the Hessian of the Hamiltonian of the sinh-Gordon equation is equal to the operator of the linear problem. To this end, we obtain a linear stability problem whose structure is completely different from that in Deconinck et al. (2020); Jones et al. (2013).
In this paper, using the integrable method as in (Deconinck and Nivala 2011; Bottman et al. 2011; Nivala and Deconinck 2010; Bottman and Deconinck 2009; Deconinck and Segal 2017), we construct the spectrum and eigenfunction connections between the Lax pair and linear stability problem. With such connections, we show the spectral stability of the elliptic solutions to the sinh-Gordon equation. Next, as in (Deconinck and Kapitula 2010; Deconinck and Nivala 2011; Bottman et al. 2011; Nivala and Deconinck 2010; Deconinck and Upsal 2020), we employ the Lyapunov method (Arnold 1997; Deconinck and Kapitula 2020; Arnold 1969; Weinstein 2003; Holm et al. 1985; Henry et al. 1982), to conclude the orbital stability with the help of classical results of Grillakis, Shatah and Strauss (Grillakis et al. 1987).
2 The Elliptic Solutions of the sinh-Gordon Equation
We construct the real, bounded, periodic, traveling wave solutions to the sinh-Gordon equation. To obtain the traveling wave solutions, one rewrites the sinh-Gordon equation in a frame moving with constant velocity c. With \(z=X-cT\) and \(\tau =T\), the Sinh–Gordon equation becomes
In what follows, we assume that \(c \ne \pm 1\). Stationary solutions are time-independent solutions of (5): \(u(z,t)=f(z)\). They satisfy the ordinary differential equation
Multiplying by \(f'(z)\) and integrating once,
where \({\mathcal {E}}\) is a constant of integration referred to as the total energy.
Equation (6) is rewritten as the first-order two-dimensional system
with (0, 0) as a fixed point. The linearization about the origin has eigenvalues
For \(c^2>1\), the fixed point is a center using the linear approximation and nearby trajectories are closed curves. Since system (8) is conservative, the fixed point is also a center when nonlinear terms are considered, as shown in Fig. 1. For \(c^2<1\), the fixed point is a saddle and all orbits are unbounded, as shown in Fig. 1. Thus, the periodic solutions are expected for \(c^2-1>0\). If \(c^2>1\), then \({\mathcal {E}}>1\), from (7).

Typical (f, g) phase plane for \(c^2>1\) (left) and \(c^2<1\) (right)
Motivated by Natali (2011), we look for solutions to (7) of the form
where v(z) is a function to be determined, and \(\alpha \), \(\beta \) and d are parameters. Differentiating and squaring (10), one obtains
Using (7), the above equation can be reduced to
To obtain the elliptic solutions, we introduce \({\text {sn}}(z, k)\), the Jacobi elliptic sine function with argument z and modulus k Lawden (1989). It satisfies the first-order nonlinear equation
Motivated by (13), we wish to eliminate the higher-order terms in the numerator and \(v^2\) from the denominator of (12). This is accomplished by equating \({\mathcal {E}}=d\) and \((\alpha +d)^2=1\), \(d^2=1\) and \(\alpha +2d=0\) or \(d^2=1\) and \({\mathcal {E}}=d+\alpha \).
Case I: with the condition \({\mathcal {E}}=d\) and \((\alpha +d)^2=1\), we know that \(\alpha <0\) and \(d>1\) since \({\mathcal {E}}>1\), and equation (12) becomes
Motivated by the form of (13), we need \(-2\alpha d \beta -2\beta (d^2-1)<0\). We rewrite (12) as
We note that \(\frac{-2\alpha (-2\alpha d \beta -2\beta (d^2-1))}{4\alpha ^2 \beta ^2(c^2-1)}<0\), which means that no elliptic solutions are obtained from (13).
Case II: with the condition \(d^2=1\) and \({\mathcal {E}}=d+\alpha \), we cannot find elliptic solutions from (12). In fact, with \(d^2=1\) and \({\mathcal {E}}=d+\alpha \), motivated by the form of (13), the expression of (12) implies that \(\beta =1\) or \(\beta =1+\frac{\alpha }{2d}\).
-
For \(\beta =1+\frac{\alpha }{2d}\), Equation (12) becomes
$$\begin{aligned} \left( \frac{{\text {d}} v}{{\text {d}} z}\right) ^{2}=\frac{(1-\beta v^2)[2\alpha d \beta (1- v^2)](-2{\mathcal {E}}+2d)\beta }{4\alpha ^2 \beta ^2(c^2-1)}. \end{aligned}$$(16)Comparing (16) and (13), we obtain \(0<\beta <1\) since the elliptic modulus \(0<k<1\) in (13). Since \(d^2=1\) and \({\mathcal {E}}>1\), we know that \(\alpha ={\mathcal {E}}-d>0\). From \(\beta =1+\frac{\alpha }{2d}\), we know \(d=-1\) so that \(0<\beta <1\). From \(\beta =1-\frac{\alpha }{2}>0\), we know \(\alpha <2\). But when \(d=-1\), we know that \(\alpha ={\mathcal {E}}+1>2\).
-
For \(\beta =1\) and \(d=1\), Equation (12) becomes
$$\begin{aligned} \left( \frac{{\text {d}} v}{{\text {d}} z}\right) ^{2}=\frac{\left( 1-v^{2}\right) \left( \alpha ^{2}+2 \alpha \right) \left[ \left( 1-\frac{2 \alpha }{\alpha ^{2}+2 \alpha } v^{2}\right) \right] (-2 {\mathcal {E}}+2)}{4 \alpha ^{2}\left( c^{2}-1\right) }, \end{aligned}$$(17)from which \(\frac{(-2{\mathcal {E}}+2)(\alpha ^2+2\alpha )}{4\alpha ^2(c^2-1)}<0\), and no elliptic solutions are obtained from (13).
-
For \(\beta =1\) and \(d=-1\), Equation (12) becomes
$$\begin{aligned} \left( \frac{{\text {d}} v}{{\text {d}} z}\right) ^{2}=\frac{\left( 1-v^{2}\right) \left( \alpha ^{2}-2 \alpha \right) \left[ \left( 1+\frac{2 \alpha }{\alpha ^{2}-2 \alpha } v^{2}\right) \right] (-2 {\mathcal {E}}-2)}{4 \alpha ^{2}\left( c^{2}-1\right) }. \end{aligned}$$(18)Since \(d=-1\), \(\alpha ={\mathcal {E}}-d>2\), which implies that \(-\frac{2 \alpha }{\alpha ^{2}-2 \alpha }<0\). Therefore, we cannot obtain elliptic solutions from (13). Case III: we consider \(d^2=1\) and \(\alpha +2d=0\). Equation (12) is reduced to
$$\begin{aligned} \left( \frac{{\text {d}} v}{{\text {d}} z}\right) ^{2}=\frac{(1-\beta v^2)[2{\mathcal {E}}-2d-2\alpha -(2{\mathcal {E}}-2d)\beta v^2]}{4 \beta (c^2-1)}. \end{aligned}$$(19) -
For \(d=-1\) and \(\alpha =2\), Equation (12) becomes
$$\begin{aligned} \left( \frac{{\text {d}} v}{{\text {d}} z}\right) ^{2}=\frac{(2{\mathcal {E}}-2)(1-\beta v^2)[1-\frac{(2{\mathcal {E}}+2)}{2{\mathcal {E}}-2}\beta v^2]}{4 \beta (c^2-1)}. \end{aligned}$$(20)Motivated by (13), \(\beta \) cannot be 1. In fact, if \(\beta =1\), we note \(\frac{(2{\mathcal {E}}+2)}{2{\mathcal {E}}-2}>1\), which means that \(k>1\). Therefore, \(\beta \) cannot be 1. According to the form of (13), we obtain \(\beta =k^2\) and then from (20), we have
$$\begin{aligned} \frac{2{\mathcal {E}}+2}{2{\mathcal {E}}-2}\beta =1. \end{aligned}$$(21)It follows that
$$\begin{aligned} \cosh (f(z))=\frac{2}{1-k^2 {\text {sn}}^2(b z, k)}-1. \end{aligned}$$(22)where \(b=\sqrt{\frac{{\mathcal {E}}+1}{2(c^2-1)}}\) and \( k=\sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\).
-
For \(d=1\) and \(\alpha =-2\), Equation (12) becomes
$$\begin{aligned} \left( \frac{{\text {d}} v}{{\text {d}} z}\right) ^{2}=\frac{(2{\mathcal {E}}+2)(1-\beta v^2)[1-\frac{(2{\mathcal {E}}-2)}{2{\mathcal {E}}+2}\beta v^2]}{4 \beta (c^2-1)}. \end{aligned}$$(23)Motivated by (13), \(\beta \) cannot be \(k^2\). In fact, if \(0<\beta =k^2<1\), we obtain \(\frac{(2{\mathcal {E}}-2)}{2{\mathcal {E}}+2}\beta =1\), which means that \(\beta >1\). Therefore, \(\beta \) cannot be \(k^2\). According to the form of (13), we obtain \(\beta =1\) and equation (12) becomes
$$\begin{aligned} \left( \frac{{\text {d}} v}{{\text {d}} z}\right) ^{2}=\frac{(2{\mathcal {E}}+2)(1- v^2)[1-\frac{(2{\mathcal {E}}-2)}{2{\mathcal {E}}+2} v^2]}{4 (c^2-1)}. \end{aligned}$$(24)It follows that
$$\begin{aligned} \cosh (f(z))=\frac{-2}{1-{\text {sn}}^2(b z, k)}+1, \end{aligned}$$(25)where b and k have the same expressions as in (22). The solutions are periodic with period \(T(k)=\frac{2 \mathrm {K}}{b}\), where
$$\begin{aligned} K(k)=\int _{0}^{\pi / 2} \frac{\mathrm {d} y}{\sqrt{1-k^{2} \sin ^{2}(y)}}, \end{aligned}$$(26)the complete elliptic integral of the first kind, see Lawden (1989). The solutions (22) and (25) have the following properties:
-
Using \({\text {dn}}^2(bz, k)=1-k^2 {\text {sn}}^2(b z, k)\) and \(\frac{1-k^2}{{\text {dn}}^2(b z,k)}={\text {dn}}^2(b z+K(k),k)\), (22) simplifies to
$$\begin{aligned} \cosh (f(z))=\frac{2}{1-k^2} {\text {dn}}^2(b z+K(k), k)-1=\frac{1+k^2}{1-k^2}-\frac{2k^2}{1-k^2}{\text {sn}}^2(b z+K(k), k).\nonumber \\ \end{aligned}$$(27) -
Using the solutions (22) and (25), we could obtain the same Krein signature \(K_{1}\) [see section 6].
3 The Linear Stability Problem
In this section, we examine the stability of the elliptic solutions obtained above. Considering the perturbation of a stationary solution to (5),
where \(\epsilon \) is a small parameter; we obtain the linear stability problem
With \(w_{1}(z, \tau )=w(z, \tau ) \text{ and } w_{2}(z, \tau )=c w_{z}(z, \tau )-w_{\tau }(z, \tau )\), the linear problem is rewritten as:
We note that (30) is autonomous in time. By separating variables,
the linear problem (30) is rewritten as:
where
Note that \({{\mathcal {L}}}\) is formally self-adjoint. We define the spectrum \(\sigma (J {\mathcal {L}})\) of the operator \(J {\mathcal {L}}\)
If \(\lambda \) has no strictly positive real part, spectral stability of an elliptic solution with respect to perturbations that are bounded on the whole line is constructed. Because the Sinh–Gordon equation is a Hamiltonian partial differential equation (McKean 1981), the spectral stability is neutral stability (Wiggins 2003), i.e., the spectrum is purely imaginary.
4 The Lax Pair Restricted to the Elliptic Solution
Equation (3) admits the
following Lax pair Ablowitz (1981):
From (35), one has the following spectral problem:
It is noted that the spectral problem is self-adjoint. Therefore, we define the Lax spectrum:
Through (2), (1) admits the following Lax pair:
We transform the Lax pair by moving into a traveling reference frame, letting \(z=X-c T\), \(\tau =T\) and \(u(z,\tau )=f(z)\). The Lax pair restricted to the stationary solution is
Because A, B and C are independent of \(\tau \), by separating variables we expect the solutions of the following form:
where \(\Omega \) is independent of \(\tau \). We substitute (38) in the \(\tau \)-part of the Lax pair and obtain
To guarantee the existence of nontrivial solutions, we require
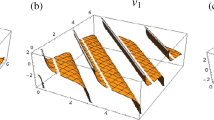
Here, the expression of \({f'(z)}^2\) obtained before has been used. Equation (40) determines \(\Omega \) in terms of \(\zeta \). Since \(\zeta \) is real, \(\Omega \) is real or imaginary. Further, \(\Omega ^2\) is an even function of \(\zeta \). From the discriminant of (40), we know that with \({\mathcal {E}}>1\) and \(c^2>1\), (40) is expressed as:
where \(\zeta _{1}=\frac{1}{2} \sqrt{\frac{\left( c-1\right) ({\mathcal {E}}-\sqrt{ {\mathcal {E}}^2-1})}{(c+1)}}\) and \(\zeta _{2}=\frac{1}{2} \sqrt{\frac{\left( c-1\right) ({\mathcal {E}}+\sqrt{ {\mathcal {E}}^2-1})}{(c+1)}}\), see Fig. 2.

The graph of \(\Omega ^2\) as a function of real \(\zeta \)
The eigenvectors corresponding to the eigenvalue \(\Omega \) are
where \(\gamma (z)\) is a scalar function. Substituting (42) in the z-part of the Lax pair, we obtain
Excluding the branch points, where \(\Omega =0\), each \(\zeta \) results in two values of \(\Omega \). Thus, (42) represents two linearly independent solutions. When \(\zeta =\zeta _{1}\) or \(\zeta =\zeta _{2}\), only one solution is obtained. The second one may be obtained using the reduction of order method.
Since the vector part of the eigenvector \(\varphi (z)\) is bounded in z, we need to check for which \(\zeta \) the scalar function \(\gamma \) is bounded for all z, including as \(|z|\rightarrow \infty \). A necessary and sufficient condition for this is that Bottman et al. (2011); Bottman and Deconinck (2009)
Here, \(\langle \cdot \rangle =\frac{1}{ T} \int _{-\frac{T}{2}}^{\frac{T}{2}} \cdot {\text {d}} z\) means the average over a period. Recently, Upsal and Deconinck Upsal and Deconinck (2020) demonstrated that purely real Lax spectrum implies spectral stability. We show this explicitly below.
-
a)
When \(\Omega \) is imaginary, the integrand of (44) is
$$\begin{aligned} {\text {Re}}\left( - \frac{B \left[ {\frac{(1-c)f'(z)}{4}+\frac{i\sinh f(z)}{8\zeta }}\right] }{A-\Omega }\right) +{\text {Re}}\left( - \frac{A'}{A-\Omega }\right) . \end{aligned}$$(46)The second term is a total derivative, with zero average over a period. For the first term,
$$\begin{aligned} {\text {Re}}\left( - \frac{B \left[ {\frac{(1-c)f'(z)}{4}+\frac{i\sinh f(z)}{8\zeta }}\right] }{A-\Omega }\right) =f'(z)\left[ \frac{\sinh f(z)(1-c^2)+\sinh f(z)(1-c)^2}{32\zeta (-i A+i\Omega )}\right] ,\nonumber \\ \end{aligned}$$(47)which is a total derivative, resulting in zero average over a period. Thus, the Lax spectrum contains all \(\zeta \) values for which \(\Omega \) is imaginary.
-
b)
If \(\Omega \) is real, the second term is still a total derivative, thus giving zero average over a period. We consider the first term:
$$\begin{aligned}&{\text {Re}}\left( - \frac{B \left[ {\frac{(1-c)f'(z)}{4}+\frac{i\sinh f(z)}{8\zeta }}\right] }{A-\Omega }\right) =\Omega \frac{\frac{(1+c)(1-c)^2 f'(z)^2}{16}+\frac{(c-1)(\sinh ^2(f(z)))}{64\zeta ^2}}{\Omega ^2+A^2}\nonumber \\&\quad +f'(z)F(f(z)). \end{aligned}$$(48)The second term is a total derivative, thus giving zero average over a period. The first term results in a zero average only when \(\Omega \) is zero. Thus, all values of \(\zeta \) for which \(\Omega \) is real (except for the four branch points, where \(\Omega =0\)) are not part of the Lax spectrum.
Based on the above analysis, the Lax spectrum consists of all \(\zeta \) values for which \(\Omega ^{2} \le 0\):
Moreover, \(\Omega ^2\) takes on all negative values for \(\left( -\infty ,-\zeta _{2}\right] , \left[ -\zeta _{1},0\right) , \left( 0, \zeta _{1}\right] \) and \(\left[ \zeta _{2}, \infty \right) \), respectively, which means that \(\Omega \) covers the imaginary axis four times.
5 The Squared Eigenfunction Connection
The eigenfunction connections between the Lax pair and the linear stability problem have been studied in different integrable systems (Ablowitz 1981; Sachs 1983; Newell 1985; Deconinck and Nivala 2011; Bottman et al. 2011; Nivala and Deconinck 2010; Bottman and Deconinck 2009; Deconinck and Segal 2017).
Theorem 1
The difference of squares,
satisfies the linear stability problem (29). Here, \(\psi =\left( \psi _{1}, \psi _{2}\right) ^\mathrm{T}\) is any solution of the Lax pair (37).
Let us construct the connection between the \(\sigma _{J{\mathcal {L}}}\) spectrum and the \(\sigma _{L}\) spectrum. Substituting (49) and (38) in (31),
so that
with
We note that all but three solutions of (32) may be written in this form. Moreover, the squared eigenfunction connection could be used to construct all bounded solutions of (32).
This is proven as in Deconinck and Nivala (2011); Bottman et al. (2011); Nivala and Deconinck (2010); Bottman and Deconinck (2009): We need to figure out how many solutions could be constructed using the squared eigenfunction connection for a given \(\lambda \). Note that \(\Omega ^2\) is an even function of \(\zeta \). Excluding the two values of \(\lambda \) where \(\Omega ^2\) reaches its maximum value, (40) gives rise to four values of \(\zeta \in {\mathbb {C}}\). We revisit these values in (b), below. For all other values of \(\lambda =2\Omega \), any fixed \(\Omega \) and \(\zeta \) defines a unique solution (up to a multiplicative constant) of the Lax pair. As in Deconinck and Nivala (2011); Bottman et al. (2011); Nivala and Deconinck (2010); Bottman and Deconinck (2009), there are two parts for this.
-
(a)
For any \(\lambda \) not equal to the two values mentioned earlier, we obtain four solutions through the squared eigenfunction connection. Since \(\Omega ^2\) is an even function of \(\zeta \), the Lax parameters come in \(\{-\zeta , \zeta \}\) pairs. As in Deconinck and Nivala (2011), only one element of these pairs gives rise to an independent solution of the stability problem, eliminating two of these four solutions. On the other hand, as in Bottman and Deconinck (2009), when the exponential contribution from \(\gamma \) exists, the remaining two solutions are linearly independent. \(\Omega =0\) is the only possibility that there is no exponential contribution from \(\gamma \). In that case, using the squared eigenfunction connection, we construct only one solution, corresponding to \((f_{z}, cf_{zz})^\mathrm{T}\). The other one is constructed through the reduction of order method and introduces algebraic growth.
-
(b)
Let us consider the case when \(\Omega ^2\) reaches its maximum value (two excluded values of \(\lambda \)). Using the squared eigenfunction connection, we obtain only one unbounded solution. The second one may be constructed using reduction of order and introduces algebraic growth.
As a consequence of the discussion above, the double covering in the \(\Omega \) representation drops to a single covering. In summary, we have the following theorem.
Theorem 2
The periodic traveling wave solutions of the sinh-Gordon equation are spectrally stable. The spectrum of their associated linear stability problem is explicitly given by \(\sigma (J {\mathcal {L}})=i {\mathbb {R}}\).
Using the SCS basis lemma in Haragus and Kapitula (2008), we conclude that the eigenfunctions form a basis for \(L_{p e r}^{2}([-N \frac{T}{2}, N \frac{T}{2}])\), for any integer N. Therefore, the linear stability with respect to subharmonic perturbations is established.
6 Orbital Stability
In this section, we study the orbital stability of the elliptic solutions to sinh-Gordon equation. Since we will use the higher-order flows in the sinh-Gordon hierarchy, we need u and its derivatives of up to order three to be square-integrable.
To prove orbital stability, we prove formal stability first: We construct a Lyapunov functional for the elliptic solutions using the conserved quantities of the sinh-Gordon equation. We introduce the Hamiltonian structure of the sinh-Gordon equation and its hierarchy. We use the system form of the sinh-Gordon equation:
The Hamiltonian structure is Ablowitz (1981), McKean (1981)
with
and \(J=\left( \begin{array}{cc}{0} &{} {1} \\ {-1} &{} {0}\end{array}\right) \).
We mark the conserved quantities of the sinh-Gordon equation as \(\left\{ H_{j}\right\} _{j=0}^{\infty }\). The first three conserved quantities are:
In fact, all the functionals \(H_{i}\) are mutually in involution under the Poisson bracket. The conservation and the involution properties for \(H_{0}\), \(H_{1}\), and \(H_{2}\) are straightforward to verify. Each \(H_{i}\) defines an evolution equation with respect to a time variable \(\tau _{i}\) by
where \(H_{i}^{\prime }(u,p)\) denotes the variational gradient of \(H_{i}\). The collection of (57) with \(i=0, 1, \ldots \) is the sinh-Gordon hierarchy. Its first three members are
Since the flows in the sinh-Gordon hierarchy commute, we could construct a new Hamiltonian system using the linear combination of the above Hamiltonians. The n-th sinh-Gordon equation with evolution variable \(t_{n}\) is defined as
where the coefficients \(c_{n,i}\) are constants. For example, \({\hat{H}}_{1}=H_{1}-cH_{0}=H\) is the Hamiltonian of the Sinh–Gordon equation (53) and (4), as shown in (56).
Every equation in the sinh-Gordon hierarchy admits a Lax pair. They have the same z-part \(\psi _{z}=-T_{0} \psi \), while the \(\tau _{j}\)-part (\(\psi _{\tau _{j}}=T_{j} \psi \)) is different:
where
The Lax pair for the n-th sinh-Gordon equation is obtained:
We study the stationary solutions of the sinh-Gordon hierarchy. Since the flows commute, any stationary solution of the Sinh–Gordon equation solves any other flows, for a suitable choice of the coefficients \(c_{n,i}\).
For example, the traveling wave solutions \((f, c f_{z})\) are the stationary solutions of the first equation in the Sinh–Gordon hierarchy with \(c_{1,0}=-c\). They are also stationary solutions of the second equation in the sinh-Gordon hierarchy provided
This gives one condition for the two coefficients \(c_{2,1}\) and \(c_{2,0}\). In order to proceed as in Refs. Grillakis et al. (1990), Bottman et al. (2011), we consider stability in the space of subharmonic functions of period NT, for \(1\le N\in {\mathbb {N}}\), i.e.,
To prove the orbital stability of the solution (u, p) in this space, we construct a Lyapunov function (Grillakis et al. 1990; Maddocks and Sachs 1993), i.e., a constant of the motion \({\mathcal {E}}(u,p)\) for which (u, p) is an unconstrained minimizer:
where \({\mathcal {E}}^{\prime }(u,p)\) denotes the variational gradient of \({\mathcal {E}}\) and \({{\mathcal {L}}}\) is the Hessian of \({\mathcal {E}}\). The existence of the Lyapunov function yields formal stability. We know that \((f_{z}, c f_{zz})^\mathrm{T}\) is in the kernel of \({\hat{H}}_{1}^{\prime \prime }={\mathcal {L}}\). This is obtained from the action of the infinitesimal generator \(\partial _{z}\), acting on \((f(z), p(z))^\mathrm{T}\), where \(p(z)=cf_{z}\). Following the results of Grillakis, Shatah, and Strauss (Grillakis et al. 1987, 1990), under certain conditions (see the orbital stability theorem in Deconinck and Kapitula (2010); Deconinck and Nivala (2011); Bottman et al. (2011); Nivala and Deconinck (2010)) one could prove the orbital stability. Since the sinh-Gordon equation is an integrable Hamiltonian system, all the conserved quantities of the equation satisfy the first two conditions. It suffices to construct one that satisfies the third requirement.
To prove orbital stability, we check the Krein signature \(K_{1}\) (Grillakis et al. 1987), associated with \({\hat{H}}_{1}\):
where \({\mathcal {L}}_{1}={\mathcal {L}}\). Using the squared eigenfunction connection, we have
with \(\varphi _{1}=-\gamma (z) B(z)\) and \(\varphi _{2}=\gamma (z) (A(z)-\Omega )\). Using (43), we have
With \(\Omega ^2=A^2+|B|^2\), we have
where
It follows that the Krein signature \(K_{1}\) can be expressed as:
where E(k) is the complete elliptic integral of the second kind (Lawden 1989):
We have the following properties:
-
1.
Using the solutions (22) and (25), we could obtain the same Krein signature \(K_{1}\). For solution (22), \(\int _{-N \frac{K}{b}}^{N \frac{K}{b}} \cosh f(z) {\text {d}} z=\int _{-N \frac{K}{b}}^{N \frac{K}{b}}\left( \frac{2}{1-k^2 {\text {sn}}^2(b z, k)}-1\right) d z=N\left( \frac{4}{b}\frac{1}{1-k^2}E(k)-2\frac{K}{b}\right) \) and for solution (25), \(\int _{-N \frac{K}{b}}^{N \frac{K}{b}} \cosh f(z) {\text {d}} z=\int _{-N \frac{K}{b}}^{N \frac{K}{b}}\left( \frac{-2}{1-{\text {sn}}^2(b z, k)}+1\right) d z=N\left( -2\left( 2\frac{K}{b}-\frac{2}{b}\frac{1}{1-k^2}E(k)\right) +2\frac{K}{b}\right) =N\left( \frac{4}{b}\frac{1}{1-k^2}E(k)-2\frac{K}{b}\right) \). Therefore, they have the same Krein signature \(K_{1}\).
-
2.
\(P(\zeta )\) is an even function and the discriminant of \(P(\zeta )\) is positive. Since \(\frac{-1+c}{-16(1+c)}<0\), \(P(\zeta )=0\) has two real roots \(\pm \zeta _{c}\) \((\zeta _{c}>0)\). It follows that \(K_{1}(\zeta )=0\), when \(\Omega (\zeta )=0\) or \(\zeta =\pm \zeta _{c}\). Since \(\frac{d{\frac{P(\zeta )}{\zeta ^2}}}{d\zeta }=-\frac{2 \left( 16 \zeta ^4 (c+1)+c-1\right) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) }{\zeta ^3}\), we know that for \(c>1\), when \(\zeta >0\), \(\frac{P(\zeta )}{\zeta ^2}\) decreases along \(\zeta \) and when \(\zeta <0\), \(\frac{P(\zeta )}{\zeta ^2}\) increases along \(\zeta \). For \(c<-1\), when \(\zeta >0\), \(\frac{P(\zeta )}{\zeta ^2}\) increases along \(\zeta \) and when \(\zeta <0\), \(\frac{P(\zeta )}{\zeta ^2}\) decreases along \(\zeta \).
-
3.
Since \(\zeta _{1}<\zeta _{c}<\zeta _{2}\), \(\pm \zeta _{c}\) is not in \(\sigma _L\) (see Appendix), \(K_{1}=0\) is obtained only on the kernel of \({\mathcal {L}}_{1}\), i.e., when \(\Omega =0\). For \(c<-1\), \(\zeta _{c}=\frac{1}{2} \sqrt{\frac{-\sqrt{c^2 K(k)^2+E^2(k) ({\mathcal {E}}+1)^2-2 E(k) ({\mathcal {E}}+1) K(k)}-E(k) ({\mathcal {E}}+1)+K(k)}{(c+1) K(k)}}\). For \(c>1\), \(\zeta _{c}=\frac{1}{2} \sqrt{\frac{\sqrt{c^2 K(k)^2+E^2(k) ({\mathcal {E}}+1)^2-2 E(k) ({\mathcal {E}}+1) K(k)}-E(k) ({\mathcal {E}}+1)+K(k)}{(c+1) K(k)}}\). We note that \(\zeta _{c}, \zeta _{1}\) and \(\zeta _{2}\) are all greater than zero.
-
4.
When \(c>1\), since \(\frac{P(\zeta )}{\zeta ^2}>0\) for \(|\zeta |< \zeta _{1}\), \(K_{1}>0\) for \(|\zeta |< \zeta _{1}\) and since \(\frac{P(\zeta )}{\zeta ^2}<0\) for \(|\zeta |> \zeta _{2}\), \(K_{1}<0\) for \(|\zeta |>\zeta _{2}\). When \(c<-1\), since \(\frac{P(\zeta )}{\zeta ^2}<0\) for \(|\zeta |< \zeta _{1}\), \(K_{1}<0\) for \(|\zeta |< \zeta _{1}\) and since \(\frac{P(\zeta )}{\zeta ^2}>0\) for \(|\zeta |> \zeta _{2}\), \(K_{1}>0\) for \(|\zeta |>\zeta _{2}\). Therefore, we could not get orbital stability from \(K_{1}\).
It follows that \({\hat{H}}_{1}\) is not a Lyapunov function. Thus, we need to consider different conserved quantities. Linearizing the n-th sinh-Gordon equation about the equilibrium solution f, one obtains
where \({\mathcal {L}}_{n}\) is the Hessian of \({\hat{H}}_{n}\) evaluated at the stationary solution.
Using the squared-eigenfunction connection with separation of variables gives
where \(\Omega _{n}\) is defined through
Substituting (74) in the Lax pair of the n-th Sinh–Gordon equation yields a relationship between \(\Omega _{n}\) and \(\zeta \)
To find a Lyapunov functional, we check \(K_{2}\):
Therefore, we have
Here, we use that \((f, c f_{z})\) are the stationary solutions of the second flow. To calculate \(K_{2}\), we also need
where, from before,
The second sinh-Gordon equation can be expressed as:
A direct calculation gives
We can choose
to ensure \(K_{2}\) has definite sign. With this choice of \(c_{2,0}\) and \(c_{2,1}\) determined by (79), \({\hat{H}}_{2}\) is a Lyapunov functional for the dynamics (with respect to any of the time variables in the sinh-Gordon hierarchy) of the stationary solutions. Therefore, whenever solutions are spectrally stable with respect to subharmonic perturbations of period N, they are formally stable in \({\mathbb {V}}_{0,N}\).
Since the infinitesimal generators of the symmetries correspond to the values of \(\zeta \) for which \(\Omega (\zeta )=0\), the kernel of the functional \({\hat{H}}_{2}^{\prime \prime }(u, p)\) consists of the infinitesimal generators of the symmetries of the solution (u, p). On the other hand, since \(\pm \zeta _{c}\) is not in \(\sigma _L\), \(K_{2}(\zeta )=0\) is obtained only when \(\Omega =0\) for \(\zeta \in \sigma _L\). We have proved the following theorem.
Theorem 3
(Orbital stability) The elliptic solutions (22) and (25) of the sinh-Gordon equation are orbitally stable with respect to subharmonic perturbations in \({\mathbb {V}}_{0,N}, N\ge 1\).
References
Ablowitz, M.J., Segur, H.: Solitons and the Inverse Scattering Transform. SIAM, Philadelphia (1981)
Arnold, V.I.: On an a priori estimate in the theory of hydrodynamical stability. Am. Math. Soc. Transl. 79, 267–269 (1969)
Arnold, V.I.: Mathematical Methods of Classical Mechanics. Springer, New York, NY (1997)
Bottman, N., Deconinck, B.: KdV cnoidal waves are spectrally stable. DCDS-A 25, 1163–1180 (2009)
Bottman, N., Deconinck, B., Nivala, M.: Elliptic solutions of the defocusing NLS equation are stable. J. Phys. A 44, 285 (2011)
Chen, F.: Introduction to Plasma Physics and Controlled Fusion. Plenum Press, New York (1984)
Chern, S.S.: Geometrical interpretation of the sinh-Gordon equation. Ann. Pol. Math. 1, 63–69 (1981)
Deconinck, B., Kapitula, T.: On the spectral and orbital stability of spatially periodic stationary solutions of generalized Korteweg–de Vries equations. In: Guyenne, P., Nicholls, D., Sulem, C. (eds) Hamiltonian Partial Differential Equations and Applications. Fields Inst. Commun. 75. Springer, New York, pp. 285–322 (2020)
Deconinck, B., Kapitula, T.: The orbital stability of the cnoidal waves of the Korteweg–de Vries equation. Phys. Lett. A 374, 4018–4022 (2010)
Deconinck, B., Nivala, M.: The stability analysis of the periodic traveling wave solutions of the mKdV equation. Stud. Appl. Math. 126, 17–48 (2011)
Deconinck, B., Segal, B.L.: The stability spectrum for elliptic solutions to the focusing NLS equation. Phys. D 346, 1–19 (2017)
Deconinck, B., Upsal, J.: The orbital stability of elliptic solutions of the Focusing Nonlinear Schrödinger Equation. SIAM J. Math. Anal. 52, 1–41 (2020)
Deconinck, B., McGill, P., Segal, B.L.: The stability spectrum for elliptic solutions to the sine-Gordon equation. Phys. D 360, 17–35 (2020)
Drazin, P.G., Reid, W.H.: Hydrodynamic Stability. Cambridge University Press, Cambridge (1981)
Gallay, T., Pelinovsky, D.: Orbital stability in the cubic defocusing NLS equation: I. Cnoidal periodic waves. J. Differ. Equ. 258, 3607–3638 (2020)
Grillakis, M., Shatah, J., Strauss, W.: Stability theory of solitary waves in the presence of symmetry. I. J. Funct. Anal. 74, 160–197 (1987)
Grillakis, M., Shatah, J., Strauss, W.: Stability theory of solitary waves in the presence of symmetry. II. J. Funct. Anal. 94, 308–348 (1990)
Haragus, M., Kapitula, T.: On the spectra of periodic waves for infinite-dimensional Hamiltonian systems. Phys. D 237, 2649–2671 (2008)
Hasegawa, A.: Optical Solitons in Fibers. Springer, Berlin (1989)
Henry, D.B., Perez, J.F., Wreszinski, W.F.: Stability theory for solitary-wave solutions of scalar field equations. Commun. Math. Phys. 85, 351–361 (1982)
Holm, D.D., Marsden, J.E., Ratiu, T., Weinstein, A.: Nonlinear stability of fluid and plasma equilibria. Phys. Rep. 123, 1–116 (1985)
Jones, C.K.R.T., Marangell, R., Miller, P.D., Plaza, R.G.: On the stability analysis of periodic sine-Gordon traveling waves. Phys. D 251, 63–74 (2013)
Jones, C.K.R.T., Marangell, R., Miller, P.D., Plaza, R.G.: Spectral and modulational stability of periodic wavetrains for the nonlinear Klein-Gordon equation. J. Differ. Equ. 257, 4632–4703 (2014)
Larsen, A.L., Sanchez, N.: sinh-Gordon, cosh-Gordon, and Liouville equations for strings and multistrings in constant curvature spacetimes. Phys. Rev. D 54, 2801–2807 (1996)
Lawden D.F.: Elliptic Functions and Applications (Applied Mathematical Sciences vol 80). Springer, New York (1989)
Maddocks, J.H., Sachs, R.L.: On the stability of KdV multi-solitons. Commun. Pure Appl. Math. 46, 867–901 (1993)
McKean, H.P.: The sin-gordon and sinh-gordon equations on the circle. Commun. Pure Appl. Math. 34, 197–257 (1981)
Natali, F.: On periodic waves for sine-and sinh-Gordon equations. J. Math. Anal. Appl. 379, 334–350 (2011)
Newell, A.C.: Solitons in Mathematics and Physics, vol. 48. SIAM, Philadelphia (1985)
NIST Digital Library of Mathematical Functions. http://dlmf.nist.gov/, Release 1.0.14 of 2016-12-21. F. W. J. Olver, A. B. Olde Daalhuis, D. W. Lozier, B. I. Schneider, R. F. Boisvert, C. W. Clark, B. R. Miller and B. V. Saunders, eds
Nivala, M., Deconinck, B.: Periodic finite-genus solutions of the KdV equation are orbitally stable. Phys. D 239, 1147–1158 (2010)
Sachs, R.L.: Completeness of derivatives of squared Schrödinger eigenfunctions and explicit solutions of the linearized KdV equation. SIAM J. Math. Anal. 14, 674–683 (1983)
Upsal, J., Deconinck, B.: Real Lax spectrum implies spectral stability. Stud. Appl. Math. 145, 765–790 (2020)
Weinstein, M.I.: Lyapunov stability of ground states of nonlinear dispersive evolution equations. Commun. Pure Appl. Math. 39, 51–67 (2003)
Wiegel, R.L.: A presentation of cnoidal wave theory for practical application. J. Fluid Mech. 7, 273–286 (1960)
Wiggins, S.: Introduction to Applied Nonlinear Dynamical Systems and Chaos, vol. 2, 2nd edn. Springer, New York (2003)
Acknowledgements
The authors are grateful to the referees and editor for their excellent suggestions. WS has been supported by the National Natural Science Foundation of China under Grant No. 61705006, and by the Fundamental Research Funds of the Central Universities (No. 230201606500048).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Peter Miller.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Lemma
For \(c>1\), \(\frac{P(\zeta _{1})}{\zeta ^2_{1}}>0\) and \(\frac{P(\zeta _{2})}{\zeta ^2_{2}}<0\), while for \(c<-1\), \(\frac{P(\zeta _{1})}{\zeta ^2_{1}}<0\) and \(\frac{P(\zeta _{2})}{\zeta ^2_{2}}>0\).
Proof
-
For \(c>1\),
$$\begin{aligned}&\frac{P(\zeta _{1})}{\zeta ^2_{1}}=8 c \sqrt{{\mathcal {E}}^2-1} K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) +8 ({\mathcal {E}}+1) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) \nonumber \\&\quad -8 ({\mathcal {E}}+1) E\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) . \end{aligned}$$(83)Since \(E(k)<K(k)\), \(c>1\) and \({\mathcal {E}}>1\), we have \(\frac{P(\zeta _{1})}{\zeta ^2_{1}}>0\).
$$\begin{aligned}&\frac{P(\zeta _{2})}{\zeta ^2_{2}}= 8 c \left( -\sqrt{{\mathcal {E}}^2-1}\right) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) +8 ({\mathcal {E}}+1) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) \nonumber \\&\quad -8 ({\mathcal {E}}+1) E\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) . \end{aligned}$$(84)Let \(\frac{P(\zeta _{2})}{\zeta ^2_{2}}=F(c)\). We note that \(F'(c)=8\left( -\sqrt{{\mathcal {E}}^2-1}\right) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) <0\). We have
$$\begin{aligned}&F(c)<F(1)=8 \left( -\sqrt{{\mathcal {E}}^2-1}\right) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) +8 ({\mathcal {E}}+1) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) \nonumber \\&\quad -8 ({\mathcal {E}}+1) E\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) . \end{aligned}$$(85)Using \(\frac{E(k)}{K(k)}>k'=\sqrt{1-k^2}\) , see [1, 19.9.8], we have
$$\begin{aligned}&8 \left( -\sqrt{{\mathcal {E}}^2-1}\right) +8 ({\mathcal {E}}+1)-8 ({\mathcal {E}}+1) \frac{E\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) }{K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) }<8 \left( -\sqrt{{\mathcal {E}}^2-1}\right) \nonumber \\&\quad +8 ({\mathcal {E}}+1)-8\sqrt{2}\sqrt{{\mathcal {E}}+1}. \end{aligned}$$(86)Let \(Q({\mathcal {E}})=8 \left( -\sqrt{{\mathcal {E}}^2-1}\right) +8 ({\mathcal {E}}+1)-8\sqrt{2}\sqrt{{\mathcal {E}}+1}\). We note \(Q'({\mathcal {E}})=-\frac{8 {\mathcal {E}}}{\sqrt{{\mathcal {E}}^2-1}}+8-\frac{4 \sqrt{2}}{\sqrt{{\mathcal {E}}+1}}<-\frac{4 \sqrt{2}}{\sqrt{{\mathcal {E}}+1}}<0\). So we have \(Q({\mathcal {E}})<Q(1)=0\) for \({\mathcal {E}}>1\). Therefore, we have \(\frac{P(\zeta _{2})}{\zeta ^2_{2}}=F(c)<F(1)<K \left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) Q({\mathcal {E}})<0\).
-
For \(c<-1\),
$$\begin{aligned} \frac{P(\zeta _{1})}{\zeta ^2_{1}}=8 c \sqrt{{\mathcal {E}}^2-1} K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) +8 ({\mathcal {E}}+1) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) -8 ({\mathcal {E}}+1) E\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) .\nonumber \\ \end{aligned}$$(87)Let \(\frac{P(\zeta _{1})}{\zeta ^2_{1}}=G(c)\). We note that \(G'(c)=8\left( \sqrt{{\mathcal {E}}^2-1}\right) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) >0\). We have
$$\begin{aligned}&G(c)<G(-1)=8 \left( -\sqrt{{\mathcal {E}}^2-1}\right) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) +8 ({\mathcal {E}}+1) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) \nonumber \\&\quad -8 ({\mathcal {E}}+1) E\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) . \end{aligned}$$(88)Again, using \(\frac{E(k)}{K(k)}>k'=\sqrt{1-k^2}\), we have
$$\begin{aligned}&8 \left( -\sqrt{{\mathcal {E}}^2-1}\right) +8 ({\mathcal {E}}+1)-8 ({\mathcal {E}}+1) \frac{E\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) }{K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) }<8 \left( -\sqrt{{\mathcal {E}}^2-1}\right) \nonumber \\&\quad +8 ({\mathcal {E}}+1)-8\sqrt{2}\sqrt{{\mathcal {E}}+1}. \end{aligned}$$(89)We know \(Q({\mathcal {E}})<Q(1)=0\) for \({\mathcal {E}}>1\). Therefore, \(\frac{P(\zeta _{1})}{\zeta ^2_{1}}=G(c)<G(-1)<K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) Q({\mathcal {E}})<0\).
$$\begin{aligned}&\frac{P(\zeta _{2})}{\zeta ^2_{2}}= 8 c \left( -\sqrt{{\mathcal {E}}^2-1}\right) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) +8 ({\mathcal {E}}+1) K\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) \nonumber \\&\quad -8 ({\mathcal {E}}+1) E\left( \sqrt{\frac{{\mathcal {E}}-1}{{\mathcal {E}}+1}}\right) . \end{aligned}$$(90)Since \(E(k)<K(k)\), \(c<-1\) and \({\mathcal {E}}>1\), we have \(\frac{P(\zeta _{2})}{\zeta ^2_{2}}>0\). This finishes the proof of the lemma.
\(\square \)
Rights and permissions
About this article

Cite this article
Sun, WR., Deconinck, B. Stability of Elliptic Solutions to the sinh-Gordon Equation. J Nonlinear Sci 31, 63 (2021). https://doi.org/10.1007/s00332-021-09722-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00332-021-09722-4