
Abstract
When walking over stable, complex terrain, visual information about an upcoming foothold is primarily utilized during the preceding step to organize a nearly ballistic forward movement of the body. However, it is often necessary to respond to changes in the position of an intended foothold that occur around step initiation. Although humans are capable of rapidly adjusting foot trajectory mid-swing in response to a perturbation of target position, such movements may disrupt the efficiency and stability of the gait cycle. In the present study, we consider whether walkers sometimes adopt alternative strategies for responding to perturbations that interfere less with ongoing forward locomotion. Subjects walked along a path of irregularly spaced stepping targets projected onto the ground, while their movements were recorded by a full-body motion-capture system. On a subset of trials, the location of one target was perturbed in either a medial–lateral or anterior–posterior direction. We found that subjects were best able to respond to perturbations that occurred during the latter half of the preceding step and that responses to perturbations that occurred during a step were less successful than previously reported in studies using a single-step paradigm. We also found that, when possible, subjects adjusted the ballistic movement of their center of mass in response to perturbations. We conclude that, during continuous walking, strategies for responding to perturbations that rely on reach-like movements of the foot may be less effective than previously assumed. For perturbations that are detected around step initiation, walkers prefer to adapt by tailoring the global, pendular mechanics of the body.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Humans’ bipedal structure affords stable and efficient locomotion over long stretches of terrain. Although walking is often considered to be a cyclic and stereotyped behavior, it is highly sensitive to the complexity of the environment. Unpredictable changes in the terrain or the arrival of sudden obstructions in our walking path threaten to undermine our ability to walk in a stable and efficient manner. In our modern world, well-paved streets and clutter-free linoleum hallways make it easy to take for granted the need for visually guided anticipatory control during walking. However, the evolution of walking behavior took place in environments that often oppose forward locomotion. To successfully navigate a complex and dynamic world, humans need to be able to adapt locomotor behavior to the demands and constraints of the terrain, sometimes in a startlingly short span of time.
Even in our modern world, it is not difficult to identify scenarios in which a walker would need to suddenly change aspects of their locomotor behavior in response to some visually specified feature of the terrain. When sunlight reflects off a patch of ice on the sidewalk, or when the sudden movement of an animal reveals its presence on the path, walkers must rapidly alter the trajectory of their current step to avoid a difficult or even dangerous foot placement. Executing such a change to an ongoing action requires tight coupling between visual information about the upcoming terrain and control mechanisms governing the continual progress of locomotion. The need for rapid adjustments in a behavior within an otherwise repetitive action presents an important question for understanding human locomotor behavior. How do humans use visual information about the terrain to rapidly adjust foot placement during the course of ongoing, continuous locomotion?
The aim of the present study is to investigate the visual control strategies that walkers employ when responding to a sudden change in the position of a target foothold. While it is well established that walkers are capable of rapidly redirecting the trajectory of the foot mid-swing, this may not be the only strategy that walkers use to respond to target perturbations. Here, we consider the possibility that under some conditions, walkers prefer to adapt by tailoring the global, pendular mechanics of the body.
Continuous guidance of foot placement in response to perturbations
For some types of actions, humans are quite capable of making rapid adjustments to ongoing movements in response to sudden visually specified changes in the environment. Studies of manual reaching and prehension tasks provide key insights into the role of visual information in the correction of ongoing movements (Desmurget and Grafton 2000). There is substantial evidence for the role of continuous visual feedback in the correction of the ongoing movement of the hand in response to perturbations (Day and Brown 2001; Heath et al. 1998; Saunders and Knill 2003). Such corrections are rapid, occurring faster than what is typically considered the threshold for voluntary movement initiation (Day and Brown 2001; Day and Lyon 2000; Saunders and Knill 2003), and do not depend on conscious perception of the perturbations that elicit the response (Prablanc and Martin 1992). These characteristics implicate sub-cortical control mechanisms that are in the loop during the execution of an action, allowing actors to rapidly respond to changes in the environment (Day and Brown 2001; Reynolds and Day 2005b; Weerdesteyn et al. 2004).
Similar mechanisms have been implicated in the control of foot placement. Reynolds and Day (2005a) found that when subjects took a single step to a target, they were able to rapidly respond to large perturbations in intended foot placement during the course of a single step. Changes in the acceleration of the foot were observable in the range of 100–120 ms after the perturbation took place, comparable to reaction times observed for perturbations to intended manual reaching targets. Furthermore, removing visual information during the course of a single step significantly reduced the accuracy and precision of that step (Reynolds and Day 2005b). In a similar vein, Weerdesteyn et al. (2004) showed that walkers are able to either lengthen or shorten a step in response to the sudden appearance of an obstacle far faster than they are able to make voluntary changes to stride length in response to a go signal. Reaction times with hand- and foot-pointing movements while seated in the same study were also found to be more delayed than the response to the obstacle.
These findings suggest that precise control of foot placement in dynamic environments may depend on feedback control of the foot movement during the course of a step. Such a control scheme would allow walkers to make rapid adjustments to foot placement during a step in response to sudden changes in the environment, and suggests that in a complex environment visual information about the terrain around the currently moving foot is critical for the control of locomotion. Indeed, age-related declines in the ability to rapidly respond to changes in target position have been attributed to delays within the neural mechanisms involved in using visual information (Young and Hollands 2012). In light of this, foot placement control could be understood much in same way as goal-directed reaching with the hand, relying on active guidance for each step.
Limitations of a visually guided “reaching” strategy of foot placement
While it is evident that humans are capable of making fast reach-like movements with the foot on the basis of visual feedback, a control mechanism that works to rapidly alter foot placement must do so with respect to the larger goal of continued forward movement. Previous work in this area has been limited in its ability to assess whether reach-like movements with the foot constitute the only viable control strategy during continuous locomotion. The task used by Reynolds and Day (2005a, b) only looked at visual control in an isolated step (i.e., subjects were not walking but rather taking a single step, then coming to a rest). Weerdesteyn’s et al. (2004) paradigm did involve continuous walking, but subjects never had to cope with more than one obstacle at a time. As such, foot placement before and after the obstacle was unconstrained, making it possible for subjects to more easily recover from any potential effects of rapid adjustments to foot trajectory.
Thus, the aforementioned studies leave open the critical question of how the control of a rapid change in the trajectory of the foot relates to the ongoing control of walking during unperturbed locomotion. One relevant issue is the impact that the physical dynamics of locomotion have on the trajectory of a given step. During locomotion, the body is mechanically and dynamically similar to a double-inverted pendulum (Mochon and McMahon 1980) and these dynamics lead to strikingly efficient and stable walking behavior (Garcia et al. 1998; Kuo 2007; McGeer 1990). The trajectory of the body on any given step is well characterized as a ballistic movement that is parameterized by the state of the body during the previous-step and the double-support phase. Rapid changes to the state of a body during this ballistic flight could disrupt the periodically stable dynamics of locomotion. Such disruptions could be most significant if the walker intends to continue locomotion following the perturbation. In addition, the body experiences significant inertial forces and the limbs possess considerable momentum during its ballistic phase, and the success of an adjustment in stepping trajectory will likely be opposed by these forces in all but a few limited cases.
Another issue that becomes relevant in the context of continuous locomotion is how visual attention and gaze are directed. While walkers have been shown to fixate stepping-stone-like targets to guide foot placement in a feedback manner under certain constraintsFootnote 1 (Hollands and Marple-Horvat 1996; Hollands et al. 1995; Hollands and Marple-Horvat 2001), visual information sampled prior to step initiation appears to be equally important in accurate foot placement (Chapman and Hollands 2006; Hollands et al. 1995). Indeed, there is substantial evidence, suggesting that walkers use visual information about upcoming terrain in a feedforward manner to make proactive adjustments (Patla 1997). During locomotion over natural terrain, walkers alter their gaze behavior according to the difficulty of the path to ensure that they will acquire the information that they need for successful locomotion in that environment (Matthis et al. 2018). In addition, when stepping over obstacles, walkers rarely fixate the obstacles themselves during crossing but instead shift their gaze ahead once the crossing step has begun (Marigold and Patla 2007; Patla and Vickers 1997; Zettel et al. 2005). Walkers also look ahead to regions of the terrain that signal changes to necessary walking behaviors, such as a change in ground surface composition (Marigold and Patla 2007, 2008). Even when engaged in a secondary activity in a highly complex environment, walkers fixate future locations along their path rather than their current foothold (Franchak and Adolph 2010).
In addition to these findings, there are important reasons to suspect that foot placement control may depend more on visual information about the upcoming terrain detected in advance rather than visual feedback during the step. Studies of the role of visual information during walking reveal a crucial relationship between the dynamics of locomotion and visual perception of the terrain. Matthis and Fajen (2013, 2014) showed that visual information during a step is not sufficient to successfully avoid collision with an obstacle in a complex environment, but that instead walkers rely on visual information of obstacles during the step prior to the step over an obstacle. Furthermore, visual information during the preceding step was found to be crucial for the maintenance of a passive ballistic movement of the COM, indicating that walkers rely on visual information during the preceding step to effectively exploit their biomechanics (Matthis and Fajen 2013). Follow-up studies showed that when making precise steps to visual targets, walkers similarly require visual information about the location of a stepping target during the last half of the preceding step (Matthis and Fajen 2013; Matthis et al. 2017). This behavior is consistent with a visual control strategy that relies on visual information to tailor the initial conditions of a pendular flight phase for each step in advance, rather than visually guiding the foot to each stepping target.
These findings suggest that during unperturbed locomotion, visual information about the terrain is utilized to exploit the dynamics of locomotion and make adjustments to the trajectory of a step by modifying the initial conditions that parameterize a ballistic flight phase. Once the step is underway, the placement of the foot is largely governed by passive dynamics, and adjustments made during the step are largely in the service of organizing the subsequent step. It is certainly possible that when a modification of foot placement is required, the ongoing dynamics of locomotion are abandoned. However, it is also possible that modifications to a step are made in the service of continued locomotion and exploit the dynamics of walking when possible.
The role of visual information during continuous locomotion
Some insights into how walkers adapt to sudden, unexpected changes in terrain during continuous locomotion can be gleaned from studies of alternative foothold selection. In a series of studies, Moraes et al. revealed that walkers have a preference for footholds that can be reached by lengthening or widening the step, compared to those that require shortening or narrowing the step (Moraes and Patla 2006; Moraes et al. 2004, 2007). The findings of these studies led to the conclusion that walkers prefer alternative footholds that minimize foot displacement and maintain stability and forward progress, and that these factors are weighted differently depending on constraints such as how far in advance the options become apparent to the walker (Moraes 2014).
More recently, Hoogkamer et al. (2015) investigated how walkers respond to perturbations in foot placement during locomotion by projecting stepping targets onto a treadmill and then shifting the position of a subset of these targets during different phases of a subject’s approach. They found that while subjects were able to make rapid adjustments to foot placement, the success of these adjustments depended both on when the perturbation occurred and in what direction the target moved. Importantly, subjects performed worse when the perturbation occurred during or after step initiation and when the target moved in opposition to the direction of subjects’ motion.
The results from Hoogkamer et al. (2015) are important because they demonstrate that a walker’s ability to accurately respond to a change in intended foot placement is dependent on where they are in the gait cycle when that perturbation occurs. While a control strategy that relies on visual guidance of the foot during the step should yield accurate performance when the perturbation occurs shortly after step initiation, this was not found to be the case. Instead, subjects were less capable of making the full corrective movement necessary to reach the target when the perturbation occurred after the step began. In addition, the effect that the direction of subject's motion had on the success of a correction suggests that the dynamics of a subject’s forward progress may be critical in determining the outcome of a step.
Although the study conducted by Hoogkamer offers a novel approach for understanding how humans make adjustments to their steps during locomotion, the study remains limited in some key respects. First, perturbations were triggered as a function of the absolute distance of the center of pressure (COP) from the target. If walkers use visual information with respect to the gait cycle (Matthis et al. 2017; Matthis and Fajen 2013, 2014; Matthis et al. 2015), a better understanding of how they make adjustments to a step would require relating the onset of a perturbation to each subject’s specific gait cycle. Second, this study leaves open the question of what visual control strategies might be employed. The authors point to the preference for lengthening steps rather than shortening steps detailed by Moraes et al., but no mechanistic explanation is provided as to why walkers prefer these types of alterations.
Strategies for responding to sudden changes in target position
Let us now consider how walkers might cope with sudden, unexpected changes if not by executing rapid, feedback-driven, reach-like adjustments to their foot's trajectory. We offer an alternative strategy that intervenes less with the ongoing pendular motion of the COM and swinging leg. During unconstrained, steady-state walking, much of the natural variability in foot position at the end of a step can be accounted for by the state (position and velocity) of the pelvis throughout the single-support phase (Wang and Srinivasan 2014). In fact, pelvis state accounts for a higher proportion of foot placement variability than the state of the foot itself through and beyond mid-stance. This implies that during unconstrained walking, variability in the movement of the upper body is a major determinant of variability in foot placement. In principle, this linkage between upper body and swinging leg could also be exploited for the purposes of voluntarily redirecting the foot towards a new target. That is, walkers could alter the trajectory of the foot, and where the foot lands, by applying forces with the stance leg shortly before or after the beginning of the single-support phase to perturb the velocity of the COM, allowing the foot to passively swing to its new location. Importantly, this differs from the aforementioned reach-like strategy in that it relies on passive dynamics rather than active feedback control of the swinging leg. In this regard, it constitutes a strategy that allows humans to adapt to perturbations while still taking into account the dynamics of locomotion.
Predictions
This control strategy leads to several testable predictions about both performance and behavior. The first concerns how a walker’s ability to respond should improve as perturbations are detected farther in advance. One might intuit that the primary determinant of the success of the response would be whether there is sufficient time to execute a change in foot trajectory. In the single-step paradigm used by Reynolds and Day (2005a), subjects were able to almost completely respond to large perturbations that occurred just after toe-off. However, if walkers who are engaged in continuous walking prefer a strategy that exploits the passive dynamics of the body, then the perturbation must be detected far enough in advance to allow the walker to modify the trajectory of the COM. Because COM trajectory is best modified by adjusting the push-off force from the trailing leg prior to step initiation, walkers should be most capable of responding to perturbations that occur before the step to the affected target begins. Second, errors in the corrective movements that subjects make should partly depend on the location of the perturbed stepping target’s location relative to the current direction of motion of the body. If the mass of a walker is engaged in motion away from a desired stepping location, the greater exertion of force and movement speed necessary to overcome the inertia of the body should result in increased foot placement error. Third, perturbations that occur early enough in the gait cycle should elicit changes in the movement of the center of mass (COM) of the body that precede or coincide with changes in foot trajectory. If walkers make adjustments to the ballistic trajectory of step, such a change in the movement of the COM should be evident early in the step. Finally, only corrective movements that occur during the course of a step (e.g., in response to perturbation detected after toe-off) are expected to disrupt the ballistic trajectory of the COM, altering step characteristics relative to conditions where no perturbation is presented.
An alternative account is that a sudden perturbation in an intended foothold is sufficiently problematic so as to compel walkers to prioritize active guidance of the step to the target foothold over moving in a ballistically pendular manner. In this case, the primary determinant of success in responding to perturbations should be whether the walker is capable of redirecting foot trajectory to the target before heel strike. In the single-step paradigm used by Reynolds and Day (2005a), subjects were able to almost completely compensate for large (21 cm) perturbations that occurred just after toe-off. Hence, subjects in the present study should be able to completely compensate for the much smaller (6 cm) perturbations used in our setup. Second, errors in the corrective movement are expected to depend primarily on whether enough time is given for the movement of the foot to be made to completion, not on the dynamic state of the body in the gait cycle. Third, any change to the movement of the COM would be expected to follow as a consequence of the change in the movement of the lower limb. As such, changes to the trajectory of the foot (rather than the COM) should be the first indication of a response to the perturbation, regardless of when that perturbation occurred. Fourth, the pendular trajectory of the COM would be expected to be disrupted in any condition where a perturbation is presented, as walkers abandon proactive visual control in favor of actively guided foot placement.
To test these predictions, we implemented a virtual stepping-stone task in which subjects walked along a path of specified stepping targets. On a subset of trials, the position of one of the targets suddenly shifted to one of the four new locations. The timing of each perturbation was also manipulated by varying the point in the gait cycle at which the shift took place. The task is similar to those described in the opening paragraphs in which the walker realizes that an apparently safe foothold is actually unsafe and he or she must rapidly shift the intended target to a different location. The main difference is that in the present study, the location of the new target was specified rather than selected by the walker. This allowed us to focus specifically on the strategies for executing rapid locomotor adjustments independently of the process of selecting an alternative foothold, which increases response latency (da Silva Costa et al. 2018).
Methods
Subjects
Thirteen subjects (two female; mean age: 20 years; age range: 18–25 years; mean mass: 77 kg; mean heights: 1758 mm; mean leg length: 910 mm) were recruited from undergraduate psychology courses. Subjects were given extra credit for participating. Informed consent was obtained in writing from all subjects prior to participation. The protocol was approved by the Institutional Review Board (IRB) at Rensselaer Polytechnic Institute and complies with the guidelines set down in the Declaration of Helsinki. One subject was omitted from the study due to exceedingly noisy and corrupted motion-capture data. These issues were a result of a bad initial calibration and difficulty keeping the markers in place during the experiment.
Design
This study utilized a 14-camera, passive motion-capture system from Vicon, running Vicon Nexus 1.8 software. This system tracked the position of 34 retro-reflective markers attached to a tight-fitting elastic suit worn by subjects. Markers were positioned on subjects’ bodies following the Plug-In Gait Full-Body (SACR) kinematic model provided with the Vicon software.Footnote 2 A Sanyo PCL-XP45 projector was used to display the virtual stepping targets used in the experiment on the ground-plane that was traversed by subjects. The projector’s resolution was 1024 × 768 with a brightness of 3500 ANSI lumens. The projector was positioned at one end of the path subjects were asked to traverse (approximately 5 m from the starting position) and raised 1.45 m off the ground, angled towards the downwards at an incidence of approximately 25°. A custom key-stoning and alignment algorithm was employed prior to data collection to align the coordinate frame of the motion-capture system with the coordinates of the virtual environment, such that when subjects stepped on a virtual target in the real world, their measured position in the virtual world corresponded with that target. The procedure was based on a linear algorithm for reconstructing camera coordinates from an image, as outlined in Tsai (1987).
Subjects were presented with a path of six target footholds which they were subsequently asked to cross as accurately as possible. A white-noise background served to obscure potential landmarks or salient features of the lab floor that might be exploited by subjects during the experiment. The specific locations of the targets in the path were determined with the following procedure. Baseline target position was obtained from the foot-fall patterns of a researcher walking freely across the tract of ground used in the study. Pseudo-random noise [drawn from the interval (0 mm, 60 mm)] was then applied to the X and Y positions of this baseline configuration to generate 24 separate target configurations. This set of 24 was randomly ordered and used for each block of the experiment. Finally, each selected target configuration was scaled by subject leg length at the beginning of each session to ensure that subjects could comfortably reach each target foothold.
Procedure
Subjects were asked to walk across the path of target footholds while stepping as accurately as possible on each target. We instructed subjects to maintain a brisk pace to ensure that there was a need for subjects to transfer their momentum from one step to another. At slow walking speeds, each step could be considered an independent event. In such a case, the full-body step-to-step dynamics would play a less important role than they do at normal walking speeds. In addition, instructing subjects to maintain a brisk pace ensured that they did not slow down or hesitate in anticipation of a possible change in target position. Accuracy was explained as the distance between the reflective marker on the proximal joint of the second toe, and subjects were instructed to place this marker as close as possible to the center of each target. Successfully hitting a stepping target triggered a pleasant sound, while an unpleasant sound was used to indicate a miss. Subjects were instructed to use these sounds to gauge their performance and adjust accordingly. At the start of each trial, subjects entered a start box projected on the ground and waited for the “go” signal from the experimenter. Once this signal was given, subjects pressed a button on a wireless remote held in their hands. After 1 s, a bell-like sound was presented indicating that the trial began and subjects could start walking. Subjects had 6 s to cross the path successfully, or the trial would terminate and it would be necessary to start the trial over. No subjects exceeded this time limit during the experiment. A trial concluded when subjects stepped fully into an end-box defined just beyond the edge of the projector image. Upon finishing a trial, subjects returned to the start box to begin the next trial.
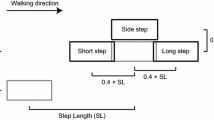
Each experimental session comprised 192 trials. On a subset of trials, the location of one target in the path was perturbed as subjects approached (Fig. 1). Perturbations occurred on 2/3rds of trials, while the other 1/3rd contained no perturbations. Unperturbed trials were randomly interspersed with perturbed trials to prevent walkers from anticipating a shift in target position before the perturbation occurred. On perturbation trials, the position of one target was instantaneously adjusted by 60 mm in one of the four directions (Fig. 1b). On half of the perturbation trials, the perturbed target was the fourth target in the set, and on the other half, it was the fifth target. Subjects began each trial by taking a step with their right foot, so perturbations to the fourth and fifth targets required modification of a left or right step, respectively. Perturbations to the target position occurred in an anterior, posterior, medial, or lateral direction, relative to the locomotor path. The point at which a perturbation was applied was manipulated as a function of the subject’s distance from the perturbed target (TP) in units of steps (Fig. 1a). Thus, a perturbation applied at one step or less occurred during the step towards TP. A perturbation that occurred at greater than one step occurred during the step with the contralateral foot to the preceding target (TP − 1). There were four points at which a perturbation was applied: 1.33 steps in advance, 0.99 steps, 0.66 steps, or 0.33 steps. Because step-length for each step was constrained by the position of the targets, these conditions can be equated to proportions of the gait cycle.

Virtual environment and task. a Perturbations occurred at one of four points during subjects’ approach, measured in units of step. b Perturbations could occur in one of four directions, relative to the direction of locomotion in the task
Trials in this experiment were divided into eight blocks of 24 trials each. Within each block, perturbations occurred at one of the four points during the gait cycle (1.33, 0.99, 0.66, or 0.33 steps). The direction of the perturbation was pseudo-randomly selected on each trial within a block, but controlled such that each perturbation direction was presented four times per block. In addition, there were eight control trials per block on which no perturbation occurred.
Prior to the start of the experiment, subjects were given instructions and performed several warm-up trials that presented conditions similar to those in the experiment. This was to give subjects a chance to become familiar with the virtual terrain and to learn how to interact with the stepping targets. During this phase, subjects were instructed to walk at a normal, brisk walking pace and to always maintain continuous locomotion. Subjects were informed that on a subset of trials, one target could change position as they approached. They were instructed to try and reach the target in its new position, but to maintain continuous forward motion as best they could. Once subjects successfully completed the warm-up phase, the experiment began.
Analyses
The analysis of subject performance focused on stepping error, COM movement, and walking speed. Stepping error was measured in terms of signed constant error from the center of the stepping target.Footnote 3 Each subject’s stepping error was centered relative to his or her mean stepping error on unperturbed trials to correct for a small but constant bias in the anterior direction (M = 3.87 cm, SE = 0.33 cm, and 95% CI = 0.72 cm). This small bias was observed in all subjects and is likely due to the fact that subjects tended to step on targets with the ball of their foot, but the marker used to measure stepping error was slightly in front of the ball foot on each subject.
We also analyzed the impact a subject’s momentum had on their ability to respond to a perturbation. We calculated the heading of each subject’s COM at toe-off, relative to the target to which they were stepping. The heading was calculated by finding the instantaneous vector of acceleration of the subject’s COM. The angle between this vector and the vector that was formed between the subject’s COM and the position of the target was then calculated, ignoring the vertical components of both vectors. In this way, we found an angular heading within the anterior/posterior and medial/lateral plane of subject movement.
Walking speed was computed as the difference in the position of each subject’s COM at toe-off and heel strike of a step divided by the time elapsed between those events. We averaged this velocity across subjects for steps where perturbations occurred. This gave us an average walking speed measure for steps where subjects experienced a perturbation. Confidence intervals were calculated to control for the difference between within- and between-subject variability.
To understand how the timing and direction of a perturbation affected a subject’s response to the perturbation relative to their biomechanics, a quantification of the “pendularity” of a step was devised, based on the methodology presented in Matthis and Fajen (2013). In short, at the beginning of each step, a 3D inverted pendulum was modeled using the momentum of the subject’s own COM at the start of that step as the initial conditions for the model. The model was then run forward in time to generate a simulated trajectory over the time course of the step. Whereas Matthis and Fajen (2013) quantified the end-point distance between the simulated trajectory and the subject’s actual COM position at the end of the step, here the sum total difference between the two trajectories over the entire step was used.Footnote 4 This results in a single score that quantifies how much a subject deviates from a pendular trajectory over the course of a step. For each subject, this pendularity score was then divided by the average pendularity score in trials where no perturbation was present, thereby normalizing the score to unperturbed trials. Finally, the normalized score was subtracted from 1.0 to center the baseline around zero, with negative scores indicating a decrease in the pendularity of the COM. The resulting score measures how much a subject’s pendularity differed from unperturbed walking in conditions where a perturbation was present.
To understand how walkers respond to perturbations, we also looked at whether the response to a perturbation was observed in the movement of the foot or the movement of the COM. If walkers respond to perturbations by making changes to the ballistic trajectory of the COM, then such changes may be detectable early in the step (possibly even before changes in the movement of the foot), as the new trajectory should be initialized at toe-off. If instead walkers primarily rely on visual guidance of the foot in a reach-like movement, then any changes to the movement of the COM are likely to be observed later during the step (if at all) as a consequence of the change in the movement of the lower limb (which is included in the COM estimation). The point of divergence between acceleration profilesFootnote 5 of perturbed and unperturbed steps for each condition was used to detect changes to locomotor behavior in response to perturbations. Such measures are commonly used to determine reaction times in motor control studies (Reynolds and Day 2005a; Saunders and Knill 2003; Weerdesteyn et al. 2004).
To detect differences in acceleration profiles, a significance test with α = 0.05 was employed along each timepoint of subject acceleration profiles. To facilitate this, acceleration profiles were time-normalized. The acceleration profile for the step to TP spanned from the step to TP − 1 to the step to TP + 1 (i.e., three total steps). Acceleration for each step was time-normalized to 100 time-bins for each portion (TP − 1, TP, and TP + 1) using a spline interpolation, giving an entire trajectory of 300 time-bins with the step to the perturbed target in the middle (i.e., time-bins 101–200).
A multivariate analysis of variance (MANOVA) was conducted at each time-bin to discover significant differences between acceleration profiles. At each bin, the MANOVA test was performed on the mean acceleration profiles of each subject for a given perturbation condition and the mean acceleration profiles from the unperturbed trials. This test attempted to predict trial type (perturbed or unperturbed) from the X, Y, and Z components of acceleration. To prevent Type-I error inflation as a result of doing multiple significance tests, a bootstrapping method was used to find the minimum number of successive significant differences needed to reliably quantify the two trajectories as significantly different (Dale et al. 2007). This method is detailed in the “Appendix”. The point of divergence in subject acceleration profiles was the first timepoint for which the trajectories were different according to this metric. Once a significant difference was detected, this was quantified as the time at which the two acceleration profiles diverged, and thus the first point when subjects responded to the perturbation.
Results
Stepping error
Figure 2 shows mean stepping error across subjects as a function of when the perturbation was presented. Analyses were grouped such that the stepping error analyzed was parallel to the direction of perturbation. For example, anterior and posterior constant error was used as the outcome measure for trials where perturbations occurred in the anterior and posterior directions. The left column shows errors that were made parallel to the direction of the perturbation. Errors that were perpendicular to the direction of perturbation are shown in the right column, though analyses focus only on parallel errors.

Stepping accuracy is shown as a function of when, and in which direction, perturbations occurred. The left column shows stepping error parallel to direction of a perturbation. For example, stepping error in either the anterior or posterior direction would be parallel to both anterior and posterior perturbations. The column on the right shows stepping error in the direction perpendicular to the direction in which a perturbation occurred. The top row shows anterior and posterior stepping errors, while the bottom row shows medial and lateral stepping errors. There is a clear relationship between when a perturbation occurs and how accurate subjects were in responding to that perturbation. Error bars are 95% CI with between-subject variability removed
For all directions of perturbations, stepping error was heavily dependent on when the perturbation took place. Stepping error was lowest in conditions where the perturbation occurred during the previous step, and highest when the perturbation occurred near the end of the step. When the perturbation occurred at 0.33 of a step, stepping error was equivalent to the magnitude of the perturbation, indicating that subjects did not produce any measurable response to the perturbation.
The statistical significance of the relationship between the timing of the perturbation and stepping error was assessed using repeated-measures analysis of variance (rmANOVA) with planned orthogonal contrasts to test for differences between conditions. To properly compare between perturbation timing and direction, the signed error (visible in Fig. 2) was reflected such that all error had the same sign, regardless of the perturbation direction. There were significant main effects of perturbation timing on both A/P (F3,33 = 35.5, p < 0.001, \(\eta_{\text{g}}^{2}\) = 0.36) and M/L (F3,33 = 95.56, p < 0.001, \(\eta_{\text{g}}^{2}\) = 0.35) error parallel to the direction of the perturbation. Furthermore, there were no main effects of perturbation direction for either A/P or M/L error. For M/L error, there was a significant interaction between perturbation timing and direction (F3,33 = 3.83, p = 0.02, \(\eta_{\text{g}}^{2}\) = 0.01), but the effect size was extremely small, suggesting that interpretation of this interaction is not overly meaningful.
To test for differences between specific perturbations times, planned orthogonal contrasts were used. These contrasts were designed to first test for differences that depended on whether the perturbation occurred before or after the step began. Such differences are important to any understanding of whether the response to a perturbation is organized around the inverted pendulum-like movement of the COM. Subsequent tests looked for differences in perturbation timing within a step. In the test statistics presented below, “A/P” is used to refer to effects of anterior and posterior perturbations on anterior and posterior stepping error, and “M/L” the effects of medial and lateral perturbations on medial and lateral error. Again, these two types of error were modeled separately, as the primary focus was on how perturbations lead to stepping errors parallel to the direction of the perturbation.
Figure 3a, b illustrates these contrast effects for A/P perturbations and M/L perturbations, respectively. There was a significant difference found between perturbations that occurred prior to toe-off and perturbations that occurred after toe-off (A/P: t748 = 9.33, p < 0.001; M/L: t748 = 18.19, p < 0.001), and a significant difference between perturbations that occurred at toe-off and those that occurred during the swing phase of the step (A/P: t748 = 8.25, p < 0.001; M/L: t748 = 9.55, p < 0.001). For anterior and posterior perturbations, no difference was found between perturbations that occurred midway through the step and those that occurred near the end of the step t748 = 0.85, p = 0.40). Significant differences were found between mid-swing and late-swing perturbations in the medial and lateral directions (t748 = 4.22, p < 0.001). The significant interaction observed in M/L error can be found in comparisons between responses that happened prior to toe-off and responses that happened after toe-off (t748 = 2.04, p = 0.04). The interaction appears to be a slight difference in the mean error between medial and lateral perturbations that occur prior to toe-off.

Planned orthogonal contrasts for stepping error analysis. Unlike Fig. 2, error here is unsigned to observe true interactions. a Contrasts for stepping error in the anterior and posterior directions. b Contrasts for stepping error in the medial and lateral directions. Error bars are 95% CI with between-subject variability removed
The effect of the COM heading
Next, we examined whether the momentum of the COM had an impact on stepping accuracy when targets were perturbed. The angle (which we refer to as COM heading) between the velocity of the COM (i.e., the subject’s instantaneous heading) and the final location of the perturbed stepping target was calculated to test if the magnitude of this angle was a good predictor of stepping error. This angle was calculated at the moment that the perturbation was applied to tie the required change in momentum directly to the first point when visual information about the perturbation was available.
Because greater force and movement speed would be required to make larger adjustments to the movement of the body, increased foot placement error should be correlated with increased differences between the COM heading and new target location.
Figure 4 shows absolute stepping errorFootnote 6 as a function of the COM heading at the beginning of the step to the perturbed target, aggregated over perturbation conditions. To quantify this effect, we constructed mixed-effects models with stepping error as the outcome variable. Because the timing of the perturbation was found to have a significant effect on the stepping error, it is perhaps unsurprising that the effect of the COM heading would be relatively small, as a large portion of the variance can be accounted for by the primary independent variables. Therefore, the models presented below attempt to quantify how much of the remaining variance can be accounted for by the COM heading, after accounting for the effects of the experimental manipulations. Because performance results focused primarily on error parallel to the direction of perturbation, we constructed separate mixed-effects models for A/P and M/L perturbations and stepping error.

Illustration of the positive relation between COM heading and stepping error. Each line corresponds to an individual subject. The model predictions shown here collapse across perturbation direction to be more qualitatively intuitive. Tables 1 and 2 present more precise mixed-effects regression models that explicitly look at this relationship across differences in perturbation direction
The effect of COM heading on stepping error was assessed by model comparison using Akaike Information Criterion (AIC) and log-likelihood ratio comparisons. Baseline models were mixed-effects models of A/P or M/L stepping error as a function of the timing of the perturbation and the direction of the perturbation (matched to the error direction). In all models subject identity was treated as a random effect and model intercepts were allowed to vary with respect to subject. For models that included the COM heading as a predictor, the slope between COM heading and the relevant error measure was also allowed to vary across subjects. An r2 score was computed for the baseline model and the full model, and compared to assess how much additional variance was accounted for. This score is based on a procedure developed by Nakagawa and Schielzeth (2013) which computes a “conditional” r2 (here after abbreviated as \(r_{\text{c}}^{2}\)) that accounts for both the fixed and random effects in a mixed-effects model. A “marginal” r2 (\(r_{\text{m}}^{2}\)) is also included which presents the effect size for the fixed effects only.
For A/P stepping error, including the COM heading into the baseline model accounted for significantly more variance (p < 0.001) in the data while reducing the AIC. This indicates that the improved fit is not an artifact of the increased degrees of freedom garnered by including a new predictor. \(r_{\text{c}}^{2}\) for the baseline model was found to be \(r_{\text{c}}^{2}\) = 0.48, and this increased to \(r_{\text{c}}^{2}\) = 0.57 when the COM heading was included. While this is only a 9% improvement overall, it represents an additional 19% of variance accounted for relative to the baseline model. This suggests that even for small perturbations, the COM heading relative to the desired stepping location has a strong impact on errors in the anterior and posterior directions. The full model, comparisons, and effect sizes can be found in Table 1.
For M/L stepping error, including the COM heading was also found to yield a significantly better model (p < 0.001) over the baseline and the AIC was reduced. However, there was almost no change in the \(r_{\text{c}}^{2}\) value between the models (less than 1%), suggesting that the updated model has very little explanatory power. In addition, there were no variations in the relationship between COM heading and M/L stepping error across subjects. As such, there appears to be little correlation between the COM heading and M/L stepping error. The complete model can be found in Table 2.
While the above analysis focused on the COM heading at the beginning of the step to the perturbed target, Fig. 5 shows the COM heading across subjects at the point that the target was perturbed in each perturbation timing condition. This figure illustrates that as subjects approach the target, the angle between their COM heading and the position of the target increases.Footnote 7 Given that the COM heading seems to have a significant impact on stepping error, especially in the anterior/posterior direction, it stands that if subjects do not compensate for the movement of the COM, their ability to respond to perturbations could be severely compromised.

COM heading (i.e., the angle between the direction of motion of the COM and the perturbed target) increases as the perturbation occurs later in the gait cycle. This is largely due to the fact that COM heading tends to increase purely as a function of the distance of the subject from the target. Because larger COM heading angles are predictive of larger stepping errors, perturbations that occur later in the gait cycle may be more difficult to respond to, as doing so requires an increasingly large change to the direction of the COM movement
Although it is possible that COM heading also has an impact on visually guided reach-like movements of the foot (see Reynolds and Day 2005a), this calls into question the efficacy of such a control strategy. Modifying the ballistic movement of the COM provides an opportunity to control the direction of the momentum of the COM directly. As such, a control strategy based on visually guiding the foot alone will always treat COM heading as a source of noise. Therefore, although investigating the effect of COM heading on foot placement accuracy cannot distinguish between these two control strategies per se, the existence of such a relationship does diminish the advantages of abandoning control of the ballistic movement of the COM in favor of a visually guided reach-like strategy. In other words, because COM heading is predictive of error regardless of the control strategy selected, exploiting a strategy that provides control over COM heading would seem to be a more effective option.
Detecting a response in movement trajectories
If walkers use visual information about footholds in a feedforward manner to make proactive adjustments to a step’s trajectory, their response to a perturbation in an intended foothold should be evident in the movement of the COM shortly after the step begins. Such a change would indicate a novel movement trajectory organized during the preceding double-support phase, or earlier, in response to the new stepping location. Figure 6 provides an example of a time-normalized acceleration profile for one subject. The calculated divergence point between perturbed and unperturbed trials across subjects is displayed as a vertical cyan line, and the point at which the perturbation occurred is displayed as a vertical orange line. This illustrates the differences in acceleration profiles that indicate change in behavior in response to the perturbation.

Mean and 95% CI for acceleration profiles in the 0.99 perturbation condition and the unperturbed condition for one example subject. The orange vertical line indicates when in the gait cycle, the perturbation occurred, while the blue vertical line indicates when differences between the two trajectories were detected, based on the methodology discussed in the “Appendix”
Routinely, changes in acceleration profiles are used to quantify reaction times in response to a perturbation in milliseconds or some other time unit, as seen in Saunders and Knill (2003), Weerdesteyn et al. (2004), and Reynolds and Day (2005a). Here, the analysis is focused instead on qualitative assessments of when changes are detected in the acceleration of the COM and foot, both relative to each other and to the timing of the perturbation. Therefore, responses are quantified in terms of percentage of a step, rather than linear time.
When perturbations occurred after step initiation, it is possible that subjects could have made adjustments to the movement of the COM during the flight phase, through movements of the upper body or by extending the foot of the stance leg, for example. However, it is not clear what impact such adjustments to would have on the dynamics of walking for subsequent steps. Therefore, qualitative analysis of the trajectory of the COM and foot was limited to the 1.33 condition when perturbations occurred prior to step initiation. If walkers modify the ballistic trajectory of the COM in response to a perturbation, then we should see changes in the trajectory of the COM (relative to unperturbed trials) near toe-off and possibly before any changes in the movement of the foot. Figure 7 depicts the points when perturbed step trajectories diverged from unperturbed steps as a percentage of the step. Here, the X- and Y-axes are flipped, so that the diverge points can be read more intuitively as though viewing a walker from a side profile.

Here is shown the points at which differences between control trials and perturbed trials could be detected in the acceleration profiles of the COM (in red) and the foot (in blue). Aside from perturbations in the medial directions, responses could be detected early in the gait cycle for both COM and foot movements in response to a perturbation. Importantly, changes to the movement of the foot never preceded changes to movement of the COM
What can be seen in this figure is that in response to perturbations that occur prior to the initiation of a step, walkers modify the trajectory of their COM. Trajectory differences can be detected early in the step in response to anterior and lateral perturbations, and midway through the step for posterior perturbations. Only medial perturbations do not elicit a change in the movement of the COM, but there is also no detected change in the movement of the foot. While this analysis is qualitative and limited in its scope, it does illustrate that walkers make adjustments to the trajectory of the COM response to a perturbation. In all cases, those changes occur at the same time, or even before changes in the movement of the foot can be detected.
Center of mass behavior
When target position is perturbed mid-swing (e.g., in the 0.66 condition), the only viable strategy is to actively redirect the trajectory of the foot in a reach-like manner. Such adjustments should affect the pendularity of the COM relative to pendularity on control trials. When target position is perturbed prior to step initiation, walkers could in principle adopt a similar reach-like strategy, in this case waiting until the step is initiated before redirecting the swinging foot to the new target position. Again, this should affect COM pendularity. However, if walkers prefer to avoid having to make mid-swing adjustments, they could modify the ballistic COM trajectory prior to toe-off, giving it a new trajectory that allows the foot to swing to the new target with minimal intervention. To the extent that the walker is successful in appropriately reinitializing the COM trajectory, no differences in pendularity would be expected.
The analysis of COM pendularity supports the latter account and suggests that walkers’ ability to utilize their pendular mechanics is undermined only when they are forced to make mid-swing adjustments. Figure 8a presents the mean and 95% CI of pendularity across subjects for each timing of the perturbation. The line at zero indicates the unperturbed walking baseline (see “Analyses”). Because 95% CI is constructed around the ratio of subject scores relative to this baseline, it is possible to visually determine conditions that are significantly different (at a p < 0.05 level) than baseline by identifying conditions where the CI does not contain zero. In this case, that is true of the 0.66 condition where any correction to the step requires a mid-flight adjustment. While the 0.33 condition should also be considered mid-flight, mean stepping error in this condition was observed to be near to that of the magnitude of the perturbation itself. As noted previously, this suggests that in this condition walkers did not (or only rarely) execute corrective movements in response to the perturbation.

Changes in a COM pendularity and b walking speed as a function of when perturbations occurred. In both cases, measures are % difference from unperturbed walking conditions. Error bars are 95% CI with between-subject variability removed
CIs provide information about the size of an effect which is arguably more important than whether an effect is significant. Inspection of the 95% CI here in relation to the distance between the means and the baseline suggests that the effect of perturbation time on the pendularity of the COM movement is quite small. Furthermore, if we were to treat the visual inspection of Fig. 8a as a t-test, corrections would need to be made for the multiple comparisons and the observed effect might disappear altogether. How seriously then should the conclusions be taken? To address this, consider a convergent piece of evidence that points to the same pattern of behavior discussed above and can be derived from our theoretical predictions.
Figure 8b presents walking speed on perturbed trials, normalized to their walking speed on unperturbed trials. Walking speed is closely tied to the control strategies involving the COM, as a walker’s speed on a given step is determined by the initial conditions that dictate the ballistic flight phase of that step (Matthis and Fajen 2013). Therefore, if the effects of a perturbation on COM pendularity are meaningful, we might expect to observe corresponding impacts on subjects’ walking speed. Here, we see the patterns in COM pendularity mirrored in the subjects’ walking speed, with a significant reduction in walking speed present only in the condition that would require a mid-flight adjustment. This further suggests that the pattern of walking that typifies unperturbed locomotion is disturbed when mid-flight adjustments are made.
Discussion
In this study, participants were asked to walk across a virtual terrain that presented them with target footholds arranged in a stepping-stone manner. On a subset of trials, one of the targets suddenly jumped to a new location and subjects needed to rapidly respond or risk a foot placement failure. The main question was whether walkers rely exclusively on feedback-driven corrections during the course of a step when responding to perturbations in intended foothold, or if they also sometimes employ an alternative strategy organized around modifying the ballistic motion of the COM prior to step initiation.
Successfully responding to perturbations
In general, stepping accuracy was highly dependent on the time within the gait cycle at which a perturbation occurred. Consistent with the critical control phase hypothesis (Matthis et al. 2017), subjects were most accurate when the perturbation to their intended foot placement occurred during the latter portion of the preceding step, and had the largest stepping error when the perturbation occurred in the mid- or late-swing phase of the step to the perturbed target.
The fact that stepping errors were observed at all when the perturbation occurred at toe-off (i.e., the 0.99 condition) is particularly noteworthy, as subjects had the entirety of the step to execute a corrective movement. In the single-step paradigm investigated by Reynolds and Day (2005a), which did not involve continuous walking, subjects were able to make rapid (and nearly complete) corrective movements to much larger perturbations that occurred just after toe-off. Given that our experiment employed a much smaller perturbation, one would expect subjects in the current study to be able to execute a visually guided response to a perturbation in stepping target location when that perturbation occurred near the start of the step.Footnote 8 In light of the results presented here, it seems instead that during continuous walking, a person’s ability to alter foot placement is more limited than it is when taking a single step, which likely reflects the influence of locomotor dynamics.
In the present study, planned contrasts were used to show that making a change to stepping behavior prior to the initiation of a step is more effective for guiding and adjusting foot placement in a dynamic environment than relying on visual guidance of the foot during the step itself. This is consonant with the critical control phase hypothesis (discussed previously) according to which visual information about the upcoming terrain is used to modify the initial conditions that determine the ballistic trajectory of a step (Barton et al. 2017; Matthis et al. 2015, 2017). This control strategy has the advantage of exploiting the efficient and naturally stabilizing characteristics of the pendular mechanical structure of the body.
It is worth noting here that one of the ways in which walkers can adjust foot placement for an upcoming step (e.g., to step on a target foothold) is by adjusting where they place their foot on the previous step. However, if walkers are not effective at guiding foot placement during the ballistic phase of the step, how is this reconciled with the idea that adjusting to foot placement on step n is one of the ways in which walkers ensure proper foot placement for step n + 1? An important take-away from this study is that in the absence of perturbations, modifications of foot placement that occur during a step are not typically organized around the demands of that step, but rather the next one. Such modifications are likely to be small (as the passive stability inherent to pendular walking mitigates the need for extensive corrections), and importantly will depend on visual information about the future terrain, not the terrain currently being stepped over. Visually guiding the foot in a reach-like manner during a step while walking can be complicated by competition between opposing task demands (one organized around the current step, one around the next step) or a failure to pick up the necessary visual information (as gaze is directed towards the upcoming step, not the current one). These difficulties would be absent when modifying foot placement for an upcoming step. The important conclusion to draw is that within the broader context of continuous locomotion, visually guided reaching with the foot may only be an appropriate control strategy in a narrow range of situations. When possible, walkers instead use visual information about the upcoming terrain to make adjustments to the dynamics locomotion at a global level, instead of acting only the level of the end effector.
Dependence on direction of perturbation
The results of the present study also suggest that visually guiding the foot may be more appropriate when dealing with changes to foot placement in certain directions. Planned comparisons of the repeated-measures ANOVA for medial/lateral stepping error found that there was a significant difference between stepping error in the 0.66 (mid-swing) and 0.33 (late-swing) conditions which was absent from the repeated-measures ANOVA for anterior/posterior error. This could suggest that walkers are better able to execute corrective movements with the foot during the step in the medial/lateral direction rather than the anterior/posterior direction.
Precedent exists for differential control mechanisms between the A/P and M/L movement of the body. Analysis of the dynamics of bipedal gait cycle reveals that for M/L movement of the COM, there is no passively stabilizing mechanism as there is for A/P movement of the COM (Bauby and Kuo 2000; Kuo 1999). Indeed, O’Connor and Kuo (2009) showed that subjects respond more strongly to full-field visual perturbations when they occur in the directions of less passive stability. Therefore, it is possible that the control strategy employed by walkers during locomotion is better equipped for active control of the step in the M/L directions, and relies more heavily on passive control in the A/P direction.
While this difference between A/P and M/L control of foot placement may be relevant, we did not find significant main effects of perturbation direction on stepping error. This is important, because Hoogkamer et al. (2015) did find differences in success rate across perturbation direction, and some of their main conclusions were based on such effects. Specifically, we did not find, as Hoogkamer et al. did, that subjects were better at making adjustments in the anterior direction than the posterior direction. We also did not find, as Hoogkamer et al. did, that subjects were more successful in responding to lateral perturbations than to posterior perturbations. One possible explanation for this difference is that because the previous study was conducted on a treadmill, their walkers were not actually moving in an inertial reference frame, and thus their COM did not have significant momentum in the A/P direction. In overground walking, an A/P perturbation occurs on an axis that is (more-or-less) parallel to the momentum vector of the COM, whereas M/L perturbations are (more-or-less) perpendicular to it. Given the dependence that we found between COM heading and stepping error, the lack of true COM movement in Hoogkammer et al., might explain the differences in our findings.
The role of COM movement
Qualitative analysis of acceleration profiles in this study revealed that changes to the movement of the COM in response to a perturbation can be detected early in the step when that perturbation occurs prior to step initiation. This indicates that walkers are using the visual information about the perturbation to generate a new ballistic trajectory for the step that compensates for the change in foot placement. To our knowledge, this is the first study that has provided direct evidence for the modification of ballistic COM movement as possible strategy for controlling foot placement in response to a perturbation of target position. Such a control strategy has important implications for walking.
First, as was demonstrated here the direction in which the COM is moving, relative to a desired foothold, has a strong impact on how successful a walker will be in reaching that foothold. For anyone who has slipped on a patch of ice while trying to take a step, the finding that the movement of the body can drastically impact foot placement will be unsurprising. In spite of this, the movement of the COM is rarely considered in studies of foot placement control, or is sometimes even intentionally mitigated by the task design (as in Reynolds and Day 2005a). This is surprising, given that during continuous locomotion the COM is always in motion, and, therefore, always impacts foot placement to a greater or lesser degree (Hof 2008; Koolen et al. 2012). It is difficult to conceive of a strategy for controlling foot placement that does not take this motion into account.
This is not to say that stepping where the COM directs will always be the best option. Indeed, any dynamic environment will be full of cases where no corrective adjustment to the COM trajectory is possible and the placement of the foot simply needs to be actively directed. In the current study, this scenario was captured by perturbations that occurred 0.66 and 0.99 steps away from the target (i.e., at the beginning and midway through the swing phase of the step). In these conditions, walkers had sufficient time to respond to the perturbation, but could not adjust the initial conditions of the ballistic COM movement.
A repeated-measures ANOVA with planned contrasts was used to understand how the pendularity of a step was affected by different perturbations. In general, perturbations that occurred during the middle of the step (i.e., the 0.66 condition here) lead to a reduction in the pendularity of the COM movement (relative to unperturbed trials), suggesting that a change in the movement of the body near mid-swing can undermine the ongoing dynamics of continuous locomotion. A reduction in walking speed was also found that coincided with the change in movement pendularity. The effects show that when walkers respond to perturbations during a step, without taking into account the movement of the COM, characteristics of stable walking are disrupted.
While such disruptions probably have limited consequences for a single step (provided the perturbation to foot placement is small enough), repeatedly adjusting and guiding foot placement during the step could have measurable consequences for walking over long distances. Step-to-step energy recovery that provides efficiency to human gait depends on the maintenance of the pendular movement of the COM (Kuo 2002; Kuo et al. 2005), as do the stabilizing mechanisms that yield consistent step-length and walking speed (Donelan et al. 2001; Kuo 2007).
What is evident from this study is that the movement of the COM has an important impact on stepping accuracy and that how foot placement is controlled has an important impact on the dynamics of walking. Given these findings, there is a strong incentive for walkers to control foot placement through changes to the ballistic trajectory of the COM on a given step when possible. This bears out in the qualitative behavior exhibited by subjects in response to perturbations.
Limitations
The primary limitation in this study was the size of the effects observed. Perturbations in this study were very small (60 mm), indeed smaller than the variance in raw stepping target position. This was intentional for two reasons. First, larger perturbations would require larger responses that could limit our ability to interpret the results. Reynolds and Day (2005a) used large perturbations in their study and found differential effects in the magnitude of the corrective movements between conditions involving an unsupported step (as in walking) and conditions involving a supported “reach” with the foot (where subjects held on to supporting bars to help balance). An inability to fully correct for a perturbation in the best-case scenario due to the size of a perturbation does not provide information about underlying control strategies and indeed could mask differential effects based on the conditions we used here.
Second, even if the motivation for the choice of a small perturbation is sound, it is nonetheless understandable that a small manipulation will produce a small effect. The changes required by the subjects to respond to the perturbation are likely to be minimal, entailing only small adjustments to either the ballistic movement of the COM or the guided trajectory of the foot. This is good, because it ensures that both strategies are possible within the context of this experiment; it would not be a fair test if one strategy was physically impossible due to the constraints of this particular task. However, it also means that in general, effect sizes are expected to be small. Thus, we relied on convergent evidence from multiple analyses, as well as qualitative assessment of behavior, to ground the findings and conclusions of this study.
Conclusion
This study sought to address the question of how walkers respond to perturbations in intended foot placement during locomotion, and whether the control strategies employed take into account the dynamics of locomotion as characterized the by movement of the COM. It was shown that when given the opportunity to modify the movement of the COM in response to a perturbation, walkers do so and are generally more effective at making corrective movements when employing this control strategy. Furthermore, it was shown that the movement of the COM has a strong influence on foot placement and that making adjustments to placement after the step has begun undermines the ballistic movement of the COM that is underway. Together, these findings point to a strategy for the visual control of walking that organizes movements around the dynamics of the body in motion, exploiting our biomechanical structure when possible.
Notes
Studies such as Hollands and Marple-Horvat (1996, 2001) used a heavily impoverished visual environment. Stepping targets were small light emitting diodes (LEDs) in an otherwise completely dark hallway. As such, subjects had no access to optic flow information or a focus of expansion in the visual field. It is not immediately clear how behavior in such an impoverished visual scene translates to visually controlled locomotion with intact visual information about the environment.
Maker positions were low-pass filtered prior to analysis using a 4th order Butterworth filter with a cutoff of 7 Hz.
Where noted, unsigned absolute stepping error was used for illustration.
These slightly different measures do not yield different results in this study, but the sum total difference has the ability to capture deviations from pendularity even for trajectories that end at the same spatial location as the simulated pendulum by chance.
The acceleration profile of a step was calculated by taking the second order difference of the position trajectory from a marker placed on the top of the foot.
Here, absolute stepping error is defined as the magnitude of the vector between the landing place of the foot and the center of the relevant target.
The only exceptions will be if a subject's COM is moving precisely at the target.
It is worth noting that in Reynolds' and Day's study, a difference was observed in subjects' ability to make a complete response to the perturbation dependent on whether their step was supported by hand rails. Reynolds and Day interpreted this finding as an indication that balance may play a role in step control.
References
Barton SL, Matthis JS, Fajen BR (2017) Visual regulation of gait: zeroing in on a solution to the complex terrain problem. J Exp Psychol Hum Percept Perform 43(10):1773–1790. https://doi.org/10.1037/xhp0000435
Bauby CE, Kuo AD (2000) Active control of lateral balance in human walking. J Biomech 33(11):1433–1440. https://doi.org/10.1016/S0021-9290(00)00101-9
Chapman GJ, Hollands MA (2006) Age-related differences in stepping performance during step cycle-related removal of vision. Exp Brain Res 174(4):613–621. https://doi.org/10.1007/s00221-006-0507-6
da Silva Costa AA, dos Santos LO, Moraes R (2018) Effect of a cognitive task on online adjustments when avoiding stepping on an obstacle and stepping on a target during walking in young adults. Exp Brain Res 236(8):2387–2397. https://doi.org/10.1007/s00221-018-5310-7
Dale R, Kehoe C, Spivey MJ (2007) Graded motor responses in the time course of categorizing atypical exemplars. Mem Cogn 35(1):15–28. https://doi.org/10.3758/BF03195938
Day BL, Brown P (2001) Evidence for subcortical involvement in the visual control of human reaching. Brain 124(9):1832–1840
Day BL, Lyon IN (2000) Voluntary modification of automatic arm movements evoked by motion of a visual target. Exp Brain Res 130(2):159–168. https://doi.org/10.1007/s002219900218
Desmurget M, Grafton S (2000) Forward modeling allows feedback control for fast reaching movements. Trends Cogn Sci 4(11):423–431. https://doi.org/10.1016/S1364-6613(00)01537-0
Donelan JM, Kram R, Kuo AD (2001) Mechanical and metabolic determinants of the preferred step width in human walking. Proc R Soc B Biol Sci 268(1480):1985–1992. https://doi.org/10.1098/rspb.2001.1761
Franchak JM, Adolph KE (2010) Visually guided navigation: head-mounted eye-tracking of natural locomotion in children and adults. Vis Res 50(24):2766–2774. https://doi.org/10.1016/j.visres.2010.09.024
Garcia M, Chatterjee A, Ruina A, Coleman M (1998) The simplest walking model: stability, complexity, and scaling. J Biomech Eng 120(2):281–288
Heath M, Hodges NJ, Chua R, Elliott D (1998) On-line control of rapid aiming movements: unexpected target perturbations and movement kinematics. Can J Exp Psychol Ottawa 52(4):163–173
Hof AL (2008) The “extrapolated center of mass” concept suggests a simple control of balance in walking. Hum Mov Sci 27(1):112–125. https://doi.org/10.1016/j.humov.2007.08.003
Hollands MA, Marple-Horvat DE (1996) Visually guided stepping under conditions of step cycle-related denial of visual information. Exp Brain Res 109(2):343–356. https://doi.org/10.1007/BF00231792
Hollands M, Marple-Horvat DE (2001) Coordination of eye and leg movements during visually guided stepping. J Mot Behav 33(2):205–216
Hollands MA, Marple-Horvat DE, Henkes S, Rowan AK (1995) Human eye movements during visually guided stepping. J Mot Behav 27(2):155–163. https://doi.org/10.1080/00222895.1995.9941707
Hoogkamer W, Potocanac Z, Duysens J (2015) Quick foot placement adjustments during gait: direction matters. Exp Brain Res 233(12):3349–3357. https://doi.org/10.1007/s00221-015-4401-y
Koolen T, de Boer T, Rebula J, Goswami A, Pratt J (2012) Capturability-based analysis and control of legged locomotion, Part 1: theory and application to three simple gait models. Int J Robot Res 31(9):1094–1113. https://doi.org/10.1177/0278364912452673
Kuo AD (1999) Stabilization of lateral motion in passive dynamic walking. Int J Robot Res 18(9):917–930. https://doi.org/10.1177/02783649922066655
Kuo AD (2002) Energetics of actively powered locomotion using the simplest walking model. J Biomech Eng 124(February):113–120. https://doi.org/10.1115/1.1427703
Kuo AD (2007) The six determinants of gait and the inverted pendulum analogy: a dynamic walking perspective. Hum Mov Sci 26(4):617–656. https://doi.org/10.1016/j.humov.2007.04.003
Kuo AD, Donelan JM, Ruina A (2005) Energetic Consequences of walking like an inverted pendulum: step-to-step transitions. Exerc Sport Sci Rev 33(2):88–97
Marigold DS, Patla AE (2007) Gaze fixation patterns for negotiating complex ground terrain. Neuroscience 144(1):302–313. https://doi.org/10.1016/j.neuroscience.2006.09.006
Marigold DS, Patla AE (2008) Visual information from the lower visual field is important for walking across multi-surface terrain. Exp Brain Res 188(1):23–31. https://doi.org/10.1007/s00221-008-1335-7
Matthis JS, Fajen BR (2013) Humans exploit the biomechanics of bipedal gait during visually guided walking over complex terrain. Proc R Soc B Biol Sci 280(1762):20130700. https://doi.org/10.1098/rspb.2013.0700
Matthis JS, Fajen BR (2014) Visual control of foot placement when walking over rough terrain. J Vis 11(11):915. https://doi.org/10.1167/11.11.915
Matthis JS, Barton SL, Fajen BR (2015) The biomechanics of walking shape the use of visual information during locomotion over complex terrain. J Vis 15(3):10. https://doi.org/10.1167/15.3.10
Matthis JS, Barton SL, Fajen BR (2017) The critical control phase for the visual control of walking over complex terrain. Proc Natl Acad Sci USA 114(11):E6720–E6729. https://doi.org/10.1073/pnas.1611699114
Matthis JS, Yates JL, Hayhoe MM (2018) Gaze and the control of foot placement when walking in natural terrain. Curr Biol. https://doi.org/10.1016/j.cub.2018.03.008
McGeer T (1990) Passive dynamic walking. Int J Robot Res 9(2):62–82
Mochon S, McMahon TA (1980) Ballistic walking. J Biomech 13(1):49–57. https://doi.org/10.1016/0021-9290(80)90007-X
Moraes R (2014) A model for selecting alternate foot placement during human locomotion. Psychol Neurosci 7(3):319–329. https://doi.org/10.3922/j.psns.2014.038
Moraes R, Patla AE (2006) Determinants guiding alternate foot placement selection and the behavioral responses are similar when avoiding a real or a virtual obstacle. Exp Brain Res 171(4):497–510. https://doi.org/10.1007/s00221-005-0297-2
Moraes R, Lewis MA, Patla AE (2004) Strategies and determinants for selection of alternate foot placement during human locomotion: influence of spatial and temporal constraints. Exp Brain Res 159(1):1–13. https://doi.org/10.1007/s00221-004-1888-z
Moraes R, Allard F, Patla AE (2007) Validating determinants for an alternate foot placement selection algorithm during human locomotion in cluttered terrain. J Neurophysiol 98(4):1928–1940. https://doi.org/10.1152/jn.00044.2006
Nakagawa S, Schielzeth H (2013) A general and simple method for obtaining R2 from generalized linear mixed-effects models. Methods Ecol Evol 4(2):133–142. https://doi.org/10.1111/j.2041-210x.2012.00261.x
O’Connor SM, Kuo AD (2009) Direction-dependent control of balance during walking and standing. J Neurophysiol 102(3):1411–1419. https://doi.org/10.1152/jn.00131.2009
Patla AE (1997) Understanding the roles of vision in the control of human locomotion. Gait Posture 5(1):54–69. https://doi.org/10.1016/S0966-6362(96)01109-5
Patla AE, Vickers JN (1997) Where and when do we look as we approach and step over an obstacle in the travel path? NeuroReport 8(17):3661–3665. https://doi.org/10.1097/00001756-199712010-00002
Prablanc C, Martin O (1992) Automatic control during hand reaching at undetected two-dimensional target displacements. J Neurophysiol 67(2):455–469. https://doi.org/10.1152/jn.1992.67.2.455
Reynolds RF, Day BL (2005a) Rapid visuo-motor processes drive the leg regardless of balance constraints. Curr Biol 15(2):48–49. https://doi.org/10.1016/j.cub.2004.12.051
Reynolds RF, Day BL (2005b) Visual guidance of the human foot during a step. J Physiol 569(Pt 2):677–684. https://doi.org/10.1113/jphysiol.2005.095869
Saunders JA, Knill DC (2003) Humans use continuous visual feedback from the hand to control fast reaching movements. Exp Brain Res 152(3):341–352. https://doi.org/10.1007/s00221-003-1525-2
Tsai R (1987) A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J Robot Autom 3(4):323–344. https://doi.org/10.1109/JRA.1987.1087109
Wang Y, Srinivasan M (2014) Stepping in the direction of the fall: the next foot placement can be predicted from current upper body state in steady-state walking. Biol Lett 10(9):20140405. https://doi.org/10.1098/rsbl.2014.0405
Weerdesteyn V, Nienhuis B, Hampsink B, Duysens J (2004) Gait adjustments in response to an obstacle are faster than voluntary reactions. Hum Mov Sci 23(3–4):351–363
Young WR, Hollands MA (2012) Evidence for age-related decline in visuomotor function and reactive stepping adjustments. Gait Posture 36(3):477–481. https://doi.org/10.1016/j.gaitpost.2012.04.009
Zettel JL, Holbeche A, McIlroy WE, Maki BE (2005) Redirection of gaze and switching of attention during rapid stepping reactions evoked by unpredictable postural perturbation. Exp Brain Res 165(3):392–401. https://doi.org/10.1007/s00221-005-2310-1
Acknowledgements
This research was supported by a grant from the National Science Foundation (1431087).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Trajectory detection with MANOVA
Appendix: Trajectory detection with MANOVA
To avoid Type-I errors when performing the search for deviations along the acceleration trajectories, a nominal value for expected “hit rates” was needed. That is, a threshold was needed that would quantify how many significant deviations in a row would be detected in the trajectory data by chance. To find this threshold, we employed a method developed by Dale et al. (2007) which used a bootstrap search for the nominal runs of significant deviations in a random set of data with the same physical and statistical properties.
To start, trajectories were time-normalized using a spline interpolation, such that the previous-step, current-step, and next-step portions were each 100 datapoints long. Thus, each point along the trajectory corresponded to a percentage of the step and could be directly compared. For each subject, average trajectories for each of the 17 experimental conditions (four perturbation times, four perturbation directions, and one unperturbed condition) were computed by taking the mean across each timepoint in all trajectories for each condition. This led to 12 subjects × (4 timing × 4 direction + 1 control) = 204 trajectories. These 204 trajectories were used to construct a series of simulated “experiments”.
Each simulated experiment involved comparing one timing and direction condition pair to control trajectories (e.g., perturbations at 0.99-steps in the medial direction compared to unperturbed walking). This entailed 24 trajectories: one manipulated and one controlled per subject. For each timepoint along the trajectories, the subject scores for the manipulated and control were used to create hypothetical distributions using the mean and standard deviations across subjects from which new simulated subjects could be drawn. For example, at each timepoint, a group of 12 x, y, and z acceleration values were drawn for the perturbed and unperturbed trajectories from normal distributions defined by the respective means and standard deviations. This gave new acceleration values for the perturbed trial and unperturbed trial. A repeated-measures multivariate analysis of variance (MANOVA) was used to decide if there was a significant difference between the perturbed and unperturbed trajectories at this timepoint, where the x, y, and z accelerations were taken as joint outcome measures. The p-value of this test was logged, and the procedure moved to the next timepoint and repeated.
This process was repeated along the entire length to the perturbed and unperturbed trajectory, and a p-value at each timepoint was logged. This trajectory of p-values could then be analyzed to determine how many times a run of p-values with a specific length n occurred. For example, there might 10 runs of 1 p < 0.05 alone, 6 runs of 2 p < 0.05 in a row, 4 runs of 3 p < 0.05 in a row. The process was repeated for each combination of perturbed trial and control trial, producing a run count for each condition. This entire process was then repeated 10,000 times. This produced 10,000 p-value run counts for each condition in the experiment. The number of times a particular run of length n was observed out of 10,000 was then used to quantify the likelihood of observing a run of length n by chance in the collected data. Runs of four significant p-values in a row were found to occur less than 1% of the time, so four was chosen as the threshold by which a significant deviation between trajectories would be identified. Thus, the first point at which two trajectories were found to be significantly different for four or more time points in a row along the length of trajectories was determined to be an accurate point of divergence. Because the MANOVA used to compute this divergence point consumed all subject data, no variance metric was obtainable for this particular measure.
Rights and permissions
About this article

Cite this article
Barton, S.L., Matthis, J.S. & Fajen, B.R. Control strategies for rapid, visually guided adjustments of the foot during continuous walking. Exp Brain Res 237, 1673–1690 (2019). https://doi.org/10.1007/s00221-019-05538-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-019-05538-7