
Abstract
During locomotion in a cluttered terrain, certain terrain surfaces such as an icy one are not appropriate for foot placement; an alternate choice is required. In a previous study we showed that the selection of foot placement is not random but systematic; the dominant choices made are not uniquely defined by the available or predicted sensory inputs. We argued that selection is guided by specific rules and involves minimal displacement of the foot from its normal landing spot. The experimental protocol involved implicit spatial constraint by requiring individuals to step on the force plate that could trigger a lighted area to be avoided, thereby requiring individuals to respond within one step-cycle. Alternate foot placement was visually identified, but not measured. The purpose of this study was to directly measure foot placement, validate and/or refine the rules used to guide selection, and identify whether the alternate foot placement choices are influenced by spatial and temporal constraints on response selection. The area to be avoided was visible from the start and therefore individuals could plan and implement appropriate avoidance strategies without any temporal constraint. Spatial constraint introduced in this experiment included requirement both to step on a specific location and to avoid stepping on a specific location on the next step. The results provide support for the rules previously identified in guiding foot placement to an alternate location. Minimal displacement of the foot from its normal landing spot was validated as an important factor for selecting alternate foot placement. When several choices satisfied this factor, additional factors guide alternate foot placement. Modifications in the plane of progression are preferred while stepping wide is avoided. When no temporal constraints are imposed on the response selection, enhancing forward progression of the body becomes the dominant determinant followed by stability and lastly by energy costs associated with the modifications. A decision algorithm for selecting foot placement is proposed based on these findings. It is clear that while visual input plays a critical role in guiding foot placement, it is not entirely based on reactive control. This has implications for implementing visually guided adaptive locomotion in legged robots.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
One of the pioneering studies related to adaptive locomotion is the study conducted by Lee et al. (1982). They showed that the variability of foot placement reduces substantially when long-jumpers are approaching the take-off board. This reduction in the variability of foot placement is indicative of visual control of adaptive locomotion (Lee et al. 1982; Montagne et al. 2000). However, when faced with different environmental features, there may be the need to implement different modifications in locomotion pattern. These modifications may include stepping over an obstacle, avoiding stepping on a specific area on the ground (e.g., a hole, a fragment of glass, or a water puddle), changing direction, and others. This study will focus on how we select foot placement in a cluttered environment.
Clearly when moving in a cluttered environment, visual input often indicates which area to avoid stepping on, but not where to step. We have shown that the alternate foot placement selection is not random, but systematic (Patla et al. 1999). This work showed that foot placement is different for the same target area to be avoided and is dependent on where in relation to the target area one normally lands. Thus, visual input about the target area, shape and size is not enough; it has to be coupled with prediction of where the foot would normally land, based on ongoing interaction between visual and proprioceptive input. We argued that this is done to predict the magnitude of foot displacement from its normal landing spot for the different choices such as stepping short, long, medial or lateral. This is the critical piece of information guiding foot placement: dominant choice corresponds to the smallest displacement of the foot from its normal landing spot. If there is only one choice that meets this criterion, the decision is simple and can be argued to be based on available sensory information from the visual and proprioceptive systems. When one or more choices meet this criterion, some internal rules must guide foot placement. These rules, we argued, must be based on functional determinants of locomotion, such as maintenance of dynamic stability and continued progression in the direction of intended travel.
Although the results from our earlier work (Patla et al. 1999) provide strong evidence for the use of minimal displacement criterion as the primary deciding factor for foot placement, the absence of quantitative measurements was a major limitation. To address this concern, in this experiment we directly measured foot placement to validate whether this is the critical measure derived from sensory input and used as the primary factor for selecting an alternate foot placement. A second limitation was the use of a force plate to trigger the light spot, which imposed a temporal constraint on response selection. In this study, we had the target to be avoided visible from the start and, therefore, individuals could plan and implement appropriate avoidance strategies without any temporal constraint. Also, we introduced for one group a spatial constraint by requiring individuals to step on a specific location followed by not stepping on a specific target area. Thus the purpose of this study was to investigate the influence of spatial and temporal constraints on foot placement, validate the primacy of minimum displacement criterion and discuss the strategies and determinants that satisfy the rules guiding foot placement choices.
Methods
Participants
Twelve participants volunteered for this study. The participants were randomly assigned to one of two groups: group A (three males and three females, age 23.7±4.8 years, height 168.2±13.8 cm, mass 69.7±19.7 kg ) and group B (one male and five females, age 23.7±2.7 years, height 168.0±4.1 cm, mass 64.5±10.6 kg). Participants did not have any neurological, muscular, or joint disorder that could affect their performance in this study. Procedures used in this study were approved by the Office of Research Ethics at the University of Waterloo.
Protocol
All participants were initially asked to walk ten times at a self-selected pace on a GAITRite mat (CIR Systems Inc., Clifton, NJ, USA). The GAITRite system consists of six sensor pads, resulting in 366×61 cm2 active areas that can detect foot contact. In each pad 2,304 sensors are equally distributed. When pressure is applied over one region, the software identifies the location of the sensors activated and the coordinates (x and z) of the foot contact can be computed. Participants stood at the edge of the GAITRite and were instructed to initiate their gait with the left leg (Fig. 1). Instead of using heel contact, foot placement (FP) was adopted since the GAITRite provides average coordinates for the mid-point of the heel pad.

Experimental set-up showing the target constraint on the third foot placement (FP3) from the start and the obstacle positions in the region of the fourth foot placement (FP4). The ellipse within the obstacle shows the spatial range of FP4 in both anterior–posterior (AP) and medial–lateral (ML) direction in the control trials. The centre of the ellipse is the average position of FP4, and the major and minor axes of the ellipse are defined by the spatial variability in AP (2× SDx) and ML (1× SDz) directions, respectively. Six different obstacle positions (P1–P6) were used. See the text for further details. The grey area indicates the active area of the GAITRite mat (CIR Systems Inc.)
Next, participants in group A were asked to walk at a self-selected pace on the GAITRite mat and avoid stepping with the entire foot on a planar obstacle (40×20 cm). The obstacle was aligned with the fourth FP based on the average foot placement determined from the initial walk-through trials. Six different positions of the obstacle were used (Fig. 1). The ellipse illustrated in Fig. 1 was constructed based on the average and standard deviation of the x- and z-coordinates of the fourth FP. The major axis (anterior-posterior direction) was defined as two times the standard deviation of the x-coordinate. The minor axis (medial-lateral direction) was defined as one standard deviation of the z-coordinate. The ellipse within the obstacle (Fig. 1) shows the spatial range of fourth FP in both anterior-posterior (AP) and medial-lateral (ML) directions. In positions 1 and 4, the centre of the obstacle coincided with the average x- and z-coordinates of the FP position. However, in position 4 the obstacle was rotated 90°. In position 2, the obstacle was positioned with the medial and posterior edges aligned with the medial and posterior edges of the ellipse, respectively. In position 3, the obstacle was positioned with the lateral and anterior edges aligned with the lateral and anterior edges of the ellipse. In position 5, the medial edge of the obstacle was aligned with the medial edge of the ellipse. In position 6, the lateral edge of the obstacle was aligned with the lateral edge of the obstacle. In positions 5 and 6 the obstacle was aligned in the AP direction using the average position of the x-coordinate of the FP. Ten trials were collected for each obstacle position. This experimental condition was designated as the unconstrained condition.
Participants in group B performed the obstacle avoidance task with an additional task constraint: they were also required to step on a target (30 cm long × 15 cm wide) placed with its centre on the average x- and z-coordinates of the third FP (Fig. 1). This condition is described as the constrained condition in subsequent text. Participants were instructed to step on this target and avoid stepping on the obstacle placed over the region of the fourth FP. Participants in the unconstrained condition performed only the obstacle-avoidance task without any spatial foot placement constraint. Sixty completely randomized trials were performed by each participant. In both conditions (i.e., unconstrained and constrained) the six obstacle positions were used.
Data analysis
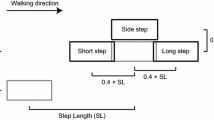
The coordinates (x,z) of each FP were subtracted from the corresponding average coordinates of walk-through trials. Based on these relative coordinates (RC), the foot placement modification vector and its angle were calculated for each trial (Fig. 2A). The value of the angle was used to define the alternate foot placement choice selected by the participants in each trial. Six possible choices were defined as illustrated in Fig. 3: long-lateral (LL), long (L), long-medial (LM), short-medial (SM), short (S), and short-lateral (SL). For each obstacle position the angle range used to define the modification was calculated as illustrated in Fig. 3. These angle ranges are defined by the edges of the planar obstacles relative to the average spatial location of FP. It was assumed that the edges implicitly defined the four major foot placement choices; anterior edge of the obstacle defined the long step modification, posterior edge the short step modification, left and right edge specified medial and lateral modifications, respectively. In addition, the medial and lateral sector modifications were bisected into equal segments to indicate whether individuals chose to modify step length during medial or lateral foot placement. The sector angles specifying the choices in this study are not symmetric as used in the previous study (Patla et al. 1999).

Schematic diagram showing the foot placement modification vector defined by the alternate foot placement and normal average foot placement. The foot placement modification vector magnitude and angle with respect to the horizontal axis are indicated. B Example of predicted minimal displacement calculation for obstacle position 1. Arrow length indicates the magnitude of the predicted minimal displacement for each of the four options: long, short, medial, and lateral

Range of angles for the foot placement modification vector for the different options calculated for each obstacle position (P1–P6). LL long-lateral, L long, LM long-medial, SM short-medial, S short, SL short-lateral
For each obstacle position, a two-way (Condition × Choice) chi-square analysis (χ2) was carried out in order to identify the preferred choice in the constrained and unconstrained conditions. For the foot placement modification vector length, two statistical analyses were carried out: (1) a two-way analysis of variance (ANOVA; Condition × Obstacle Position), with repeated measures on the last factor, compared the vector magnitudes between unconstrained and constrained conditions, and (2) a one-way repeated measure ANOVA (choice) was run separately for each condition (Constrained and Unconstrained) in order to identify any differences in foot placement modification vector length in the fourth FP. In the second analysis, the results from all obstacle positions were combined. The significance level was set at 0.05.
In order to identify whether the participants really chose the option that minimizes foot displacement, the predicted minimum displacement from the normal landing position was calculated for four modifications (long, short, medial, and lateral) as the perpendicular distance from the average landing position to the edge of the obstacle. Figure 2B illustrates the displacements calculated for obstacle position 1. For this calculation, the average foot length (27 cm) and width (9 cm) of the participants of this study was used. A constant value of 5 cm was assumed for the distance between FP and heel.
Relative adjustment (RA) was calculated as the contribution of each FP to the final foot placement modification vector magnitude (i.e., FP4) in both AP and ML directions. The coordinates (x, z) of each FP were subtracted from the corresponding average coordinates of walk-through trials in order to obtain the relative coordinates (RCs). The contribution of the previous FP was removed from the contribution of the actual FP to avoid any error accumulation in the calculation. The RCs of each FP (i.e., RC1 to RC4) were used in the calculation. The contribution of each FP to the final adjustment (RC4) is expressed in Eq. 1:
where RC is the relative coordinate of each FP and the subscript numbers indicate the FP number.
The division of Eq. 1 by RC4 will provide the relative contribution of each FP, as shown in Eq. 2.
Therefore,
and
In both AP and ML directions, when RA is equal to zero it is assumed that no adjustment was performed in that FP. Positive RA indicates that adjustment was in the same direction as the final foot placement modification vector, whereas negative RA indicates an adjustment done in the opposite direction of the final foot placement modification vector. A two-way repeated-measure ANOVA (Obstacle Position × FP#) was carried out on the RA measure for the unconstrained condition only. Since in the constrained condition participants were required to step on the target, it was assumed that adjustments in the previous steps did not contribute to the final adjustment. Therefore, the RA analysis was conducted only for the unconstrained condition.
The FP variability was calculated for FP1 to FP3 and comparison made between control condition (walk-through trials) and constrained condition. A two-way repeated measure ANOVA (Condition × FP#) was carried out on the FP variability separately for the AP and ML directions.
Step length was calculated based on the FP coordinates (i.e., the absolute difference between two successive FPs). The measure of step length was used in a regression analysis as proposed by Montagne et al. (2000). In this analysis two parameters were defined: adjustment done, and adjustment needed. Adjustment done was defined as the difference between current step length and mean step length. Adjustment needed was defined as the difference between current heel–target distance (HTD) and average HTD (see Fig. 8A for details). According to Montagne et al. (2000) the adjustment needed for step N is related to the adjustment done for step N+1. The regression analysis between adjustment done and adjustment needed identifies the step when effective modification is initiated for the task of stepping on a target. A significant slope identifies the initiation of the modification (α=0.05). Since in the unconstrained condition there is no target to step on, this analysis was only conducted for the constrained condition. In addition, because the target was a constant parameter, independent of obstacle location in the subsequent step, regression analysis was performed across all constrained trials for each participant.
Results
It was found that spatial constraint does not affect the dominant alternate foot placement choices for avoiding different obstacles. However, the magnitude of foot displacement from its normal landing spot is smaller in the constrained condition. In the unconstrained condition, adjustments in foot placement started a few steps before the obstacle. Spatial and temporal constraints influenced the order of determinants satisfied while selecting alternate foot placement. Spatial constraint highlighted the primacy of the criterion of minimizing displacement of the foot from its normal landing spot. A lack of temporal constraint highlighted the priority of maximizing forward progression of the body. A detailed summary of results are organized around the specific questions posed in the study and are described next.
Is the adaptive foot placement affected by the spatial constraint?
The percentage of trials for each foot placement choice for each obstacle position is shown in Fig. 4. In both conditions the predominant choice was a long modification. Chi-square analyses for each obstacle position identified no significant difference between unconstrained and constrained conditions. The only exception observed was for the obstacle position 6 (χ2(1)=5.63, p=0.018). In position 6, a slightly higher frequency of short modifications was observed; nevertheless, the dominant choice was still stepping long. In general, the presence of a spatial constraint does not affect the dominant choice in each obstacle position.

Percentage of trials for each of the six possible alternate foot placement choices for each obstacle position (P1–P6) in the unconstrained and constrained conditions. Shaded number indicates the dominant choice for each obstacle position
Does the dominant choice for all obstacle positions involve minimum displacement of the foot from its normal landing spot?
The predicted minimum displacement as well as the average foot displacement from its normal landing spot for each obstacle position in both unconstrained and constrained conditions is shown in Table 1. For the obstacle positions P1, P2, and P4, the predicted minimum displacement is smaller for the medial (P1 and P2) and long (P4) options. As observed previously in Fig. 4, the dominant choice for those obstacle positions are medial (P1 and P2) and long (P4) as well. In addition, the option that would result in the greatest displacement is never chosen for P1 and P2. For obstacle positions P3, P5 and P6, the minimum displacement corresponds to either medial or lateral foot placement. However, the dominant choice is long for all of these three obstacle positions. The long option is the next smallest displacement of the foot from its normal landing spot for these three obstacle positions. Therefore, the minimum displacement is not the primary factor that dictates foot placement choices.
Is the foot displacement vector magnitude affected by the spatial constraint?
Figure 5 illustrates the resultant vectors for each obstacle position in both unconstrained and constrained conditions for the adaptive (fourth) FP. A two-way ANOVA (Condition × Obstacle Position) with repeated measures on the last factor compared the foot placement modification vector length between unconstrained and constrained conditions. The results indicated a significant main effect of Condition (F(1,10)=20.62, p=0.0011). The foot placement modification vector length is bigger for the unconstrained condition than for the constrained condition (unconstrained 33.15 cm, SE=2.80; constrained 22.82 cm, SE=2.57).

Individual foot placement modification vectors for the fourth foot placement (FP4) in the unconstrained condition (left column) and the constrained condition (right column). The sector divisions in each circle correspond to the vector classification sectors used for each obstacle position (P1–P6)
A one-way repeated-measure ANOVA (Choice) indicated a main effect of foot placement choices on the foot placement modification vector length only for the constrained condition (F(4,6)=19.65, p=0.0014). The foot placement modification vector magnitude is bigger for the short step option than for the medial and lateral choices (Fig. 6A).

A Foot placement modification vector length for the constrained condition for the different choices (LL long-lateral, L long, LM long-medial, SM short-medial, S short). Asterisk indicates significant difference from the medial and lateral choices. B Interaction effect between condition (unconstrained and constrained) and first to fourth foot placement (FP1 to FP4) for the foot placement modification vector length variable
Is the onset of initiation of foot placement modification affected by the spatial constraint?
Figure 7 shows the modifications of the four FPs for the obstacle position 1 for both constrained and unconstrained conditions. In the first three FPs of the constrained condition, the foot placement modification vector length is similar and near zero. However, in the unconstrained condition the foot placement modification vector magnitude increases during successive steps. This indicates that the absence of constraint gives more flexibility to modify the foot placement during the approach phase. This behaviour was consistent for all obstacle positions. A two-way ANOVA (Condition × FP#) with repeated measures on the last factor identified a main effect of condition (F(1,10)=22.66, p=0.0008) and of FP# (F(3,30)=283.95, p<0.0001) for the foot placement modification vector length. In addition, a significant interaction effect was observed between condition and FP# (F(3,30)=22.07, p<0.0001). Fig. 6B shows that vector magnitude is kept constant from FP1 to FP3 in the constrained condition. It only increases from FP3 to FP4. On the other hand, the vector magnitude increases continuously from FP1 to FP4 in the unconstrained condition.

Individual foot placement modification vectors for steps 1 to 4 (FP1–FP4) for the obstacle position 1 in the unconstrained (left column) and constrained (right column) conditions
The repeated-measure ANOVA (Obstacle Position × FP#) for the RA in the unconstrained condition indicated a main effect of foot placement in both AP and ML directions (F(3,15)=6.93, p=0.0038 and F(3,15)=7.12, p=0.0034, respectively). For the AP direction, there was an overall trend of increasing RA from foot placement 1 to 4 (0.14±0.33, 0.20±0.18, 0.27±0.25, and 0.38±0.27, respectively). Least-squares means post hoc analysis indicated that the following pair-wise comparisons are significantly different: FP1 vs. FP3, FP1 vs. FP4, and FP2 vs. FP3. Interestingly, the major contributions for the adaptive foot placement in the ML direction are provided only for the foot placements 2 and 4 (0.70±0.86 and 0.27±0.65), whereas the foot placements 1 and 3 had no contribution for the adaptive foot placement (0.07±0.30 and −0.05±1.28). Least-squares means post hoc analysis indicated that FP2 is different from FP1, FP3, and FP4.
Are the modifications observed during the approach phase correlated to the modification in the adaptive step?
A Pearson correlation analysis was conducted on the foot placement modification vector angle. The angles from FP1, FP2, and FP3 were correlated with the angle of FP4 for the unconstrained condition. As illustrated in Table 2, the correlation value increases from FP1 to FP3 and is statistically significant, starting from FP2, for the majority of obstacle positions. This indicates that participants planned in advance the modification that they would implement in the adaptive step.
Is visual information used to regulate foot placement on the target?
The regression analysis between the adjustment done and the adjustment needed indicates when effective foot placement adjustment started in order to step on the target. Figure 8 shows an example of the plot between adjustment done and adjustment needed for steps 2 and 3. This figure illustrates the performance of one participant when the adjustment occurred in the target step (i.e., step 3). It is important to note that the adjustment done is always negative. This is because the centre of the target was placed on the average coordinates of the FP3. As the participants were asked to step with the entire foot on the target, they shortened the step in relation to the average step length, and the adjustment needed increased as a consequence of that. The values of the slope and R2 for each participant are shown in Table 3. Half of the participants exhibited adjustment initiation in step 2, whereas the other half exhibited some adjustment only in the target step.

A Diagram showing the parameters used to calculate the adjustment needed and adjustment done (adapted from de Rugy et al. 2000) (HTD heel–target distance, SL step length, FP foot placement). B Plot of the adjustment done against the adjustment needed for the step 2 (one step before the target) and for the step 3 (step in region of the target)
The comparison between the standard deviation of the control and experimental trials can also signal when adjustment was initiated (Lee et al. 1982). The variability in both AP and ML directions during control condition increased from FP1 to FP3 (Fig. 9). In contrast, during the constrained condition variability reduced as a function of FP#; the most marked changes were from FP2 to FP3.

Foot placement variability for first to third foot placements (FP1–FP3) for the control (walk-through) trials, constrained condition, and unconstrained condition for the anterior–posterior (A) and medial–lateral (B) directions
Discussion
Our first study, aimed at understanding the bases for selection of alternate foot placement during locomotion in a cluttered terrain, led us to propose a hierarchical decision flow chart used by individuals. The flow chart in the lightly shaded area of Fig. 10 is based on the results from the previous study.

Decision algorithm showing the basis for selection and the rules that guide selection of alternate foot placement. The shaded area is based on the results from the previous study by Patla et al. (1999); the additional rules are expansion of the decision algorithm based on this present experiment. The determinants associated with the rules are listed in the right-hand column
While most parts of the decision tree shown in Fig. 10 were validated by Patla et al. (1999), some decisions proposed were inferred and were not directly tested since quantitative measures were unavailable. In particular, the minimum displacement criterion was inferred to be the main criterion individuals use to select alternate foot placement, but since kinematics measures were not available it could not be validated. This present study allowed us to carefully evaluate the validity of this criterion. Also, the earlier study design imposed a temporal constraint on the participants: they had to select and implement an alternate foot placement choice within a step cycle. This is an ecologically valid paradigm mimicking conditions when one’s attention is diverted during locomotion and an undesirable stepping surface is not seen till one or two steps before. But so is the condition when the area to be avoided is visually observable earlier in the approach phase. How this influences the selection of alternate foot placement was evaluated in this study. Another condition required individuals to perform two separate tasks in two consecutive steps: to step on a specific target area in one step, followed by instruction to avoid stepping on area defined by the planar obstacles positioned in different configurations. This allowed us to evaluate the influence of task requirement of one step on the selection of alternate foot placement in the subsequent step. Therefore this present study allowed us to develop and test a more general algorithm for selection of alternate foot placement during locomotion in a cluttered terrain. We begin first by discussing evidence supporting the various components of the original decision tree shown in Fig. 10 and then proceed to how the different task requirements modify the decision algorithm.
Evidence for visual control of foot placement not only in the adaptive step but also during the approach phase
While there is no doubt that during the adaptive step, individuals had to rely on vision to avoid stepping on the area defined by the planar obstacles, the results also clearly show that vision is used to regulate foot placement during the approach phase. The seminal study of Lee et al. (1982) has shown that there is a switch from a stereotyped mode to a visually based mode of control resulting in a reduction in variability of foot placement. In this present study we found similar reduction in foot placement variability in the constrained condition (see Fig. 9), which is analogous to the task studied by Lee et al. (1982). It is important, however, to mention that participants would be able to initiate the adjustments two or three FPs before than they actually did. As the number of FPs is small, it is not possible to detect adjustment between FP1 and FP2 since the variability at FP1 is only due to the variability across trials and not the usual error accumulation from previous FPs observed in the triple-jump studies.
Variability analysis used by Lee et al. (1982) was based on data across several trials. Recently, Montagne et al. (2000) introduced a method to identify when effective foot placement adjustment occurs on a given trial. They used a long-jump paradigm, and were able to identify at which step before the take-off board effective adjustment (i.e. adjustment in the intended direction) started. We used similar analysis and showed that, for the constrained condition, the adjustments started at least one step before the target (see Fig. 8).
However, the unconstrained condition did not exhibit the same reduction in variability in foot placement. Foot placement was as variable as the control trials (walk-through trials). Once again the task requirements explain the results: there was no specific instruction to land on given target area as in the long-jump task used by others and in the constrained condition in this study. Therefore, the analysis techniques proposed by Lee et al. (1982) are robust and appropriate for a task that specifies a landing target rather than avoidance of a specific landing area. When individuals are required to avoid stepping on a surface area and have the freedom to make adjustments during the approach phase, they do spread out the modifications over several steps as seen in Fig. 7. The relative adjustment magnitudes for the unconstrained condition clearly show that individuals were making small but appropriate adjustments during the approach phase. The high correlation between the modification vectors in earlier steps and the adaptive step (FP4) (see Table 2) clearly indicates that these adjustments are in the same direction as the final adjustment. Thus, individuals were planning the adjustment direction early in the approach phase.
Evidence for validating the minimal displacement criterion as the primary basis for selecting alternative foot placement
There are several pieces of converging evidence from this study supporting the argument proposed by Patla et al. (1999) that while selecting alternate foot placement we minimize the displacement of the foot from its normal landing spot.
The first evidence for this criterion is shown in Table 1, which lists the minimum displacement needed to step long, short, medial or lateral for each obstacle condition. In particular, for the obstacles P1, P2 and P4 the dominant choice does correspond to the minimum displacement of the foot from its normal landing spot for both constrained and unconstrained conditions. Also, the choice that would result in greatest displacement of the foot from its normal landing spot is not selected. For obstacle conditions P3, P5 and P6, the minimum displacement corresponds to either medial or lateral foot placement: the next smallest displacement of the foot from its normal landing spot corresponds to stepping long. The dominant choice in these cases is stepping long and not stepping medial or lateral.
The second supporting evidence is the difference in magnitude of displacement between the unconstrained and constrained condition. In the constrained condition when major changes take place in the last step, individuals make the smallest adjustment possible (on average 23 cm). If we consider obstacle position 1, the average adjustment is 25 cm in the constrained condition. Considering the dimension of the obstacle and predominance of the long step option, this value is slightly greater (by 5 cm) than half the obstacle length. Clearly individuals are guiding their foot to land just outside the edges of the obstacle. When there were no constraints in landing on a specific target in the step before, the magnitude of changes are higher (on average 33 cm). However, since adjustments are distributed over several steps in the approach phase, this increase is understandable. Nevertheless, in both conditions maximum adjustment is on average less than average foot length.
The third piece of evidence comes when we examine the difference in magnitude of displacement for the different options. In the unconstrained condition, when adjustments can be made over several steps, the magnitude of adjustment is the same regardless of the option selected. But for the constrained condition, clearly the short option requires the largest magnitude of adjustment in the fourth step compared to the other options and it is the least-used option. This supports the argument that individuals select an alternate foot placement that requires minimal changes from the normal trajectory. On the other hand, it also possible that obstacle positioning may affect the foot placement modification vector length since the displacement for shortening the FP is bigger than the displacement for lengthening the step. Therefore, because in the unconstrained condition participants spread out the adjustments during the approach phase they could, equally, increase or decrease the foot placement modification vector length in a way that preserved the foot placement modification vector length equal when shortening or lengthening the step. However, for the constrained condition, participants could not equally increase or decrease the foot placement modification vector length because of the spatial constraint.
Collectively these arguments suggests that while minimum foot displacement from its normal landing spot is important for selecting foot placement, it is not the primary criterion but rather one of the factors used in the decision process. Minimal displacement of the foot from its normal landing spot requires minimal changes in limb trajectory and therefore ongoing muscle activity. The minimal changes in muscle activity are beneficial because it can be argued to reduce metabolic cost, result in smaller changes in active forces that could disturb balance, and the adjustment can be initiated and completed quickly. Here we are assuming that energy cost is the same for the same change in displacement of limb independent of the direction. This based on the following assumptions: the hip is an ideal spherical joint (no losses), the knee is locked and the leg is modelled as a peg leg. In this case the work done is equal to \( {\int\limits_{\theta _{1} }^{\theta _{2} } {M\theta d\theta } } \) and is independent of the direction of angular displacement for a conservative system (no energy sinks, only energy exchanges). Recent work by Bauby and Kuo (2000) and Donelan et al. (2001) used a similar model for the swing leg to calculate energy cost for foot placement modifications. Experimental work using muscle activity and/or oxygen consumption is needed to validate these assumptions. To use this factor in the decision process, an individual needs visual input about the obstacle shape, size and features, its updated relative (to the moving body) location, and prediction of location of foot landing based on step-cycle control and kinaesthetic input.
Foot displacement vector magnitude is not the only factor in selecting alternate foot placement
In the previous study, Patla et al. (1999) argued that minimal displacement from the normal landing position is the primary criterion guiding alternate foot placement selection: If several options satisfy this criterion, then additional factors need to be considered (see Fig. 10). The first decision path steers the choice towards foot placement modifications in the plane of progression. Given the choice between stepping long and stepping short, the former is the preferred choice. The dominant choice by individuals in this experiment, stepping long for obstacle positions 3, 5, and 6, confirm this strategy (see Fig. 4).
The second fork in the decision tree biases the responses towards stepping medially rather than laterally. Once again the choice made by individuals in this experiment for obstacle position 1 confirms this strategy. In this position, both stepping medially and laterally involve similar displacement of the foot from its normal landing spot. However, the participants clearly chose the medial modification. In the unconstrained condition the medial adjustment accounts for 66.1% of the preferences. For the constrained condition the medial choice is still high, 56.6%. The medial modification is chosen despite the fact that the number of cross-over steps is very high, especially for the constrained condition (Table 4). Stepping medially (involving adduction of the swing limb) is preferred even when that involves a cross-over step as seen for obstacle position 1 and 2 during the constrained condition. A cross-over step is potentially destabilizing since, if appropriate pro-active action is not taken, centre of mass (COM) of the body will be outside the base of support (BOS) defined by the area between the two feet. In this experiment we were not able to monitor whole body COM and therefore could not confirm whether COM was outside or inside the BOS. Since individuals were aware of the obstacle position well in advance, it is possible that they were able to take pro-active action to bias the location of COM to ensure that it does not fall outside the BOS. Whereas stepping laterally always ensures that COM is within the BOS during the double support phase, it does result in greater acceleration of the COM in the opposite direction of the foot placement and therefore can compromise stability. In contrast, stepping medially when planned ahead can ensure that COM is within the BOS and that the COM acceleration in the frontal plane is minimal.
Response time constraint affects the priorities placed on satisfying various determinants in the choice of the alternate foot placement
The results from this experiment along with the previous finding of Patla et al. (1999) provide evidence for the determinants that guide the selection of alternate foot placement and less of a reliance on reactive control by the central nervous system. In a task where the individual is required to precisely position their feet on a target, visually guided adjustments (usually spread out over several steps) is sufficient (e.g., de Rugy et al. 2002); when the task is to avoid a spot but no specific requirement to step on a specific location it is understandable that sensory information alone is not sufficient to guide foot placement choices. This has clear implications for implementing algorithms for controlling foot placement in biped robots (Kimura et al. 2003; Lewis and Simo 1999).
The three determinants identified in these two studies are, minimization of displacement of the foot-landing location (economy and response speed), stability (minimize COM acceleration) and forward progression (maximize displacement of COM in the travel direction). When the response has to be selected and implemented under time constraint, as in the previous study (Patla et al. 1999), the determinants are satisfied in the following order: economy and response speed first, stability second, and forward progression third. Not all the determinants are satisfied in all cases when the foot placement has to be altered quickly; for example, in those conditions when the participants chose to step medially (Patla et al. 1999), they satisfied the first two determinants, but not the last. In contrast, when there are no time constraints in response planning and implementation, as in this experiment, the priority shifts. Forward progression becomes the dominant determinant, followed by stability and lastly economy and response speed. The dominant determinant is clearly illustrated by the bias towards stepping long-medial when the medial choice is the more economical as in obstacle position 2. This is understandable since, given adequate time for planning and implementing changes, forward progression can be maximized without compromising stability through pro-active control in the approach steps.
In summary, the results from this study have validated the decision algorithm proposed by Patla et al. (1999) and allowed us to expand the decision tree to include influence of spatial and temporal constraints on alternate foot placement selection (Fig. 10). Further experiments will test the generality of this algorithm.
References
Bauby CE, Kuo AD (2000) Active control of lateral balance in human walking. J Biomech 33:1433–1440
de Rugy A, Montagne G, Buekers MJ, Laurent M (2000) The study of locomotor pointing in virtual reality: the validation of a test set-up. Behav Res Methods Instrum Comput 32:215–220
de Rugy A, Taga G, Montagne G, Buekers MJ, Laurent M (2002) Perception-action coupling model for human locomotor pointing. Biol Cybern 87:141–50
Donelan JM, Kram R, Kuo AD (2001) Mechanical and metabolic determinants of the preferred step width in human walking. Proc R Soc Lond B 268:1985–1992
Kimura H, Fukuoka Y, Mimura T (2003) Dynamics based integration of motion adaptation for a quadruped robot ‘Tekken’. Proceedings of 2nd International Symposium on Adaptive Motion of Animals and Machines, Kyoto, Japan, p 28
Lee DN, Lishman JR, Thomson JA (1982) Regulation of gait in long jumping. J Exp Psychol Hum Percept Perform 8:448–459
Lewis MA, Simo LS (1999) Elegant stepping: a model of visually triggered gait adaptation. Connection Science 11:331–344
Montagne G, Cornus S, Glize D, Quaine F, Laurent M (2000) A perception-action coupling type of control in long jumping. J Mot Behav 32:37–43
Patla AE, Prentice SD, Rietdyk S, Allard F, Martin, C (1999) What guides the selection of alternate foot placement during locomotion in humans? Exp Brain Res 128:441–450
Acknowledgments
Financial assistance was provided by Office of Naval Research, USA Grant, NSERC, Canada, and CAPES, Brazil. The authors would like to acknowledge Ewa Niechwiej who helped in data collection.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Moraes, R., Lewis, M.A. & Patla, A.E. Strategies and determinants for selection of alternate foot placement during human locomotion: influence of spatial and temporal constraints. Exp Brain Res 159, 1–13 (2004). https://doi.org/10.1007/s00221-004-1888-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-004-1888-z