
Abstract
Muscle activity preceding the onset of voluntary movement has been shown to reduce centre of mass (CoM) displacement and stabilise the body during self-induced ‘perturbations’. However, based on recent findings in the lower limb, where preparatory muscle activity creates the dynamics necessary for the initiation of movement, this study sought to investigate whether trunk musculature acted consistently to minimise the displacement of the CoM, or in contrast, contribute to the movement. While standing, nine healthy participants made single-step (point-to-point) reaching movements to 13 visual targets throughout a 180° range (target interval = 15°). Full-body kinematics and electromyographic activity from ‘focal’ arm and ‘postural’ trunk muscles were analysed for a preparatory phase of 250-ms preceding movement onset (termed pPA). Akin to lower limb findings, direction-specific patterns of anticipatory trunk muscle activity accompanied the onset of rotational kinematics and CoM acceleration in the direction of the desired target. When arranged in terms of peak activation, we found functionally relevant groupings aligned to either ipsi-, central or contra-lateral reaching directions. Contrary to traditional approaches, which focus on CoM stabilisation, this spatial recruitment was in favour of assisting initiation of movement. Such activity suggests that the central nervous system may rely on synergic patterns of muscle activation within an undistinguishable and shared focal/postural motor command for functional voluntary movements.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Goal-directed reaching when standing requires the coordination of voluntary movement and the maintenance of posture, as the final goal of the movement can be at the limits, or beyond the safety of the base of support. Many studies have shown that muscles not associated with the primary goal of moving the arm, precede the initiation of a voluntary movement (Belenkii et al. 1967; Bouisset and Zattara 1981, 1987; Zattara and Bouisset 1988; Crenna and Frigo 1991; Massion 1992; Aruin and Latash 1995; Stapley et al. 1998; Hodges et al. 1999; Commissaris et al. 2001). The general consensus has been that this preparatory muscle activity (commonly termed anticipatory postural adjustments or APAs) creates the dynamics necessary to counteract the internally produced inertial characteristics of the upcoming movement (Bouisset and Zattara 1981, 1987; Massion 1992; Hodges et al. 1999). This has been attributed to the need to control key variables, such as the position of the centre of mass (CoM), to ensure and prioritise overall stability of the body (Bouisset and Zattara 1981; Massion 1992; Hodges et al. 1999; Stapley et al. 1999).
Evidence supporting the role of APAs in posture and movement coordination has largely been acquired through experiments studying uni- or bilateral movements of the upper or lower limbs (Crenna and Frigo 1991; Eng et al. 1992; Hodges and Richardson 1997a, b; Hodges et al. 1999, 2000, 2001; Mochizuki et al. 2004; Caronni et al. 2013). Often, muscle activity is characterised for movement along distinct orthogonal planes, a common example being that of the triceps surae/tibialis anterior pairing around the ankle joint during antero-posterior movement. Crenna and Frigo (1991) identified that this stereotypical muscle pattern was related to a common biomechanical output that is a backward shift of the centre of pressure (CoP), occurring before a range of voluntary actions. From these initial findings, a traditional approach to characterising the role of APAs has been to focus on how the ankle musculature actively controls the CoP displacement in relation to the CoM (Commissaris et al. 2001). Feed-forward postural activity of the trunk, however, has received comparatively less attention, although it has been the focus of a number of studies (Oddsson and Thorstensson 1987; Tyler and Hasan 1995; Hodges and Richardson 1997a, b, 1999; Hodges et al. 1999, 2000, 2001; Allison and Morris 2008; Allison et al. 2008; Lee et al. 2009; Tsao et al. 2009; Morris et al. 2012, 2013; Park et al. 2014; Abiko et al. 2015). Considering its absolute size (the trunk comprises 60 % total body mass—Winter 1995), role in supporting and orienting the head (which contains important sensory organs), and its multiple functions, including respiration, and providing an attachment site for limb movements, if stability is a priority for the central nervous system (CNS), then trunk muscular activity may, to some extent, reflect this constraint.
Early studies by Bouisset and Zattara (1981, 1987) provided insights into how trunk muscles complement the APAs produced in the lower limbs. The presence of anticipatory erector spinae muscle activity during bilateral forward arm-raising supported the notion of stability, as it counteracted an anteriorly moving CoM. This set the scene for key trunk-specific studies of APAs whereby experimental and simulated direction-dependent superficial muscle activity and kinematics were linked to the opposition of reactive torques from shoulder displacement (Ramos and Stark 1990; Hodges and Richardson 1997a, 1999; Hodges et al. 1999, 2000, 2001; Moseley et al. 2002; Santos and Aruin 2008), and direction-independent activity from deep stabilising muscles was identified (Hodges and Richardson 1997a, 1999; Hodges et al. 1999, 2001). However, these studies mainly concentrated on the recording of muscles contra-lateral to the perturbing limb movement, favouring the identification of a role specific to countering unilateral limb movement on the opposite side. In fact, assumptions that voluntary movements are responsible for internal torques that disturb balance may even be questioned in light of biomechanical modelling (Pozzo et al. 2001), as reaction forces inflicted upon the body CoM have been shown to reverse as the limb decelerates to the end of its movement. In other words, classic interpretations may not require APA involvement if the mechanical properties of the movement are sufficient to stabilise the CoM. It is plausible to suggest that, through experience, the CNS is aware of the dynamics of the task before the movement is initiated and that postural adjustments of non-focal segments may not be necessary, purely for the countering of reactive force. Furthermore, simulation of reconstructed trunk muscle activity during seated reaches has also suggested that recorded EMG activity does not always match that predicted to ensure stability (Tyler and Hasan 1995). Further confusing this relationship between movement outcomes and the traditional rationale of APAs, recent studies with a bilateral focus on deep trunk musculature have revealed both time-varying and direction-dependent activation patterns in contrast to previous reports (Allison and Morris 2008; Allison et al. 2008; Morris et al. 2012, 2013). Such contention allows further investigation of the role of trunk musculature within posture and movement coordination.
Previously, our group has shown that APAs of the lower limb preceding whole-body, goal-directed movements can be grouped into functional muscle sets devoted to the initiation of those movements (Leonard et al. 2009). These findings supported the adoption of functional muscle synergies by the CNS as a general neural strategy to control task-level variables such as CoM or CoP position or displacement (Krishnamoorthy et al. 2003; Ting and Macpherson 2005; Torres-Oviedo and Ting 2007; Fautrelle et al. 2010; d’Avella and Lacquaniti 2013; Delis et al. 2013). In view of the importance of the trunk as a linking segment between the lower and upper limbs and its relative inertial characteristics, especially during reaching while standing, we sought to investigate activation patterns of a robust set of trunk muscles within the theoretical perspective of initiation of movement or stabilisation of posture. We asked: (1) Is the activity of the trunk muscles preceding the onset of an arm movement devoted consistently to minimising the displacement of the CoM, or in contrast, does that activity contribute to moving the CoM, and trunk, in the direction of the arm movement? and (2) What is the composition of the functional muscle groups produced during the preparatory period of reaching? If a tuning of trunk muscles exists, does it ensure stabilisation or movement during the preparatory phase? Our results show that, similar to the preparatory activity within the lower limb (Leonard et al. 2009), superficial trunk muscles produce activity tuned for movement initiation, rather than being compensatory for trunk, or CoM displacement.
Materials and methods
Participants
Nine (five male and four female) healthy right-hand dominant participants, without any known neurological, visual, or orthopaedic impairments, were recruited from the university population (mean age: 26.2 ± 6.9 years; mean height: 1.76 ± 0.08 m; mean weight: 72.8 ± 10 kg). They all gave informed consent to participate, and local institutional ethical approval (HE13/188) was granted in accordance with the Declaration of Helsinki (1975).
Determination of trunk surface electromyographic (sEMG) placement using cadaveric specimens
Due to the complexity of trunk muscle morphology (Ng et al. 1998; Urquhart et al. 2005a), inherent potential for crosstalk from neighbouring muscles and variability in electrode placement highlighted within other functional tasks (for review, see Swinnen et al. 2012), five cadaveric specimens (three male and two female) were used to evaluate electrode placement based upon distinct anatomical landmarks and muscle fibre orientation.
In the first instance, we reviewed trunk sEMG placement sites from the following published works within the functional reaching literature: Bouisset and Zattara 1981; Friedli et al. 1984; Moore et al. 1992; Hodges and Richardson 1997a, b, 1999; Hodges et al. 1999, 2000, 2001; Moseley et al. 2002; Marshall and Murphy 2003; Gibson and McCarron 2004; Urquhart et al. 2005a, b, c; Morris and Allison 2006; Lee et al. 2009; Fautrelle et al. 2010; Kuo et al. 2011. For completeness, sites described in a recent review (Swinnen et al. 2012) and the SENIAM guidelines (Hermens et al. 2000; Merletti et al. 2001) were also included. Briefly, each placement site was colour-coded and pinned onto the anterior and posterior sections of five intact cadaveric specimens (ethics approval: HE12/121). Careful dissection of the skin and subcutaneous adipose tissue layers of the trunk allowed for visualisation and interpretation of: (1) the accuracy of placement sites for each respective muscle according to each study, (2) consistency of the placement sites between specimens and across studies, and (3) conformity of the angles of placement to the underlying muscle fibres. Sites that were able to aptly satisfy all three of the aforementioned criteria were considered optimal due to their strong reproducibility.
The information set out within the European standards (Hermens et al. 2000; Merletti et al. 2001) was often the most consistent despite the plethora of varying placement data. In fact, half of the descriptions often resulted in an overlapping with other placement sites, yet were not as consistent across specimens (due to less overall information in their description). As a result of these procedures, seven trunk muscles were chosen and recorded bilaterally (see Fig. 1) from the following sites: rectus abdominis (RAl, RAr), 2 cm superior and 1 cm lateral to the umbilicus; external oblique (EOl, EOr), 1 cm below the inferior costal margin, in line with the contra-lateral pubic tubercle; combined internal oblique and transversus abdominis (IOTrAl, IOTrAr), 2 cm medial and 1 cm inferior to the anterior superior iliac spine, aligned parallel to the inguinal ligament; latissimus dorsi (Latl, Latr), at the level of the 12th thoracic vertebrae, along a line connecting the posterior axillary fold and the spinous process of the 2nd sacral vertebrae; lumbar erector spinae (LumESl, LumESr), 3 cm lateral to the 2nd lumbar vertebrae; multifidus (Multl, Multr), 2 cm lateral to the 4th/5th lumbar vertebral interspace, along a line connecting the 1st lumbar vertebrae and posterior superior iliac crest; and gluteus maximus (GMaxl, GMaxr), at half the distance between the spinous process of the 2nd sacral vertebrae and greater trochanter of the femur. The anterior (ADelr) and posterior heads (PDelr) of the deltoid muscle of the right (reaching) arm were also recorded.

Anterior (a) and posterior (b) representations of electrode placement sites for the focal (arm) and postural (trunk) musculature following cadaveric investigation (see “Materials and methods” section). Final placement positions (filled circles) for each respective muscle (grey-shaded area) were determined from a number of easily identifiable superficial anatomical landmarks (dashed lines). Specific location information for each muscle is described within “Materials and methods” section of this text
Experimental apparatus and set-up
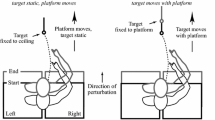
Participants stood barefoot on two tri-axial force plates (FP4550-08, Bertec, Columbus, OH, USA) that recorded ground reaction forces (GRF) and moments in the medio-lateral (x), antero-posterior (y), and vertical (z) axes at a sampling rate of 1000 Hz. Force plates were positioned within the centre of a fully adjustable, custom-built semi-circular array consisting of 13 light targets (see Fig. 2a; Leonard et al. 2009). Targets were placed at shoulder height and at 130 % of arm’s length. This distance is known to elicit measureable postural adjustments during reaching without the need to step (Leonard et al. 2009, 2011; Hua et al. 2013). The muscle activity of 16 muscles of the trunk and reaching arm (mentioned previously) was recorded using two Bagnoli eight-channel surface electromyography (sEMG) systems (Delsys, Boston, MA, USA) sampling at 1000 Hz.

Apparatus (a) and axial angular conventions (b) used within the current experimental set-up. a Participants stood evenly on two force places centred in an adjustable semi-circular array, which served as the origin of the global laboratory axes. Light-emitting diodes formed targets housed within the array (distance = 130 % reaching length; interval = 15°). They illuminated in a pseudo-randomised order, and participants reached with their dominant (right) arm. Targets were extinguished upon contact. b Due to the nature of the reaching task, primary angles measured included rotational and antero-posterior movements for the axial segments of the head, trunk, and pelvis (for full explanation of angle calculations, see “Materials and methods” section)
Target illumination was controlled using a program written in LabVIEW (National Instruments, Austin, TX, USA). Three-dimensional kinematics was recorded using a 10-camera Bonita motion capture system (Vicon, Oxford, UK) sampling at 200 Hz. Thirty-nine passive retro-reflective markers were attached to participants’ bodies as in the Vicon Plug-in-Gait models. Kinematic data and analogue signals from the force plates and sEMG were captured and synchronised using a Vicon Giganet controller (Vicon, Oxford, UK). Data were collected for a total of 3000 ms.
Experimental procedures
Procedures are described in detail in Leonard et al. (2009). Briefly, participants stood with feet at their preferred stance width centred within the array. The starting posture also required the index finger of the right hand be placed on the xiphoid process (located at the base of the sternum). Data acquisition started when the experimenter was satisfied that the participant was standing quietly (i.e. stable vertical ground reaction force traces). After a random period of 500–1000 ms, a single light target illuminated whereby participants reached and pressed the target with their right index finger while maintaining initial foot position. They returned to the start position when instructed to do so. Two familiarisation trials per direction were performed before the main experimental collection period, and a total of 15 trials per direction were collected (with direction randomised). To reduce prediction of an upcoming trial, 15 trials were also presented in which no light illuminated. To prevent central fatigue, participants received 5-min rest periods between blocks of 50 trials.
Data analysis
All analyses were completed offline using MATLAB (The Mathworks, Natick, MA, USA). Kinematics were low-pass-filtered using a second-order Butterworth algorithm at 20 Hz. EMG signals were high-pass-filtered at 35 Hz (to remove motion artefact), de-meaned, rectified, and low-pass-filtered at 100 Hz (second-order Butterworth) for visualisation and future construction of spatial tuning curves. A total of 1731/1755 trials were retained for analysis after removal of trials with corrupted data due to a non-stable initial posture.
Peak velocity of the right finger (rFIN) was used to determine key kinematic outcomes of movement onset and termination as per the methods of Shabbott and Sainburg (2009). Onset was determined as the time when the tangential velocity profile of the rFIN exceeded 3 % of its peak velocity for a period of 30 ms. Likewise, movement termination was identified as the time that the velocity reduced to below the 3 % threshold. For each trial, a period of 250 ms before movement onset was chosen to represent the preparatory postural adjustment period (pPA). This 250-ms period was further divided into five to 50-ms epochs, or ‘bins’ (i.e. pPA1–pPA5), as per the methods described by Leonard et al. (2009). The activity for each trunk muscle was calculated as a single value based on the mean activity within each epoch on a trial-by-trial basis. Due to the variation in gain amongst participants for muscles, sEMG values were then normalised to the maximum within each epoch for all subjects such that all values lay between 0 and 1. Values could then be pooled and graphed as muscle tuning curves (Torres-Oviedo and Ting 2007; Leonard et al. 2009) to characterise activity over the array of directions.
To quantify corresponding movement and dynamics resulting from the pPAs, angular displacements for the axial segments and CoM displacements defined by the Plug-in-Gait model (Vicon, Oxford, UK) were analysed (Fig. 2b). Head, trunk, and pelvic rotations were calculated from the relative segment Y axes around the vertical or laboratory Z axis. Head flexion/extension was determined using the difference between the relative Z axes of the head and trunk, respectively, while trunk flexion/extension was quantified between the relative trunk Z axis and laboratory Z axis. Pelvic anterior/posterior tilt was determined using the relative pelvic Y axis with respect to the antero-posterior or laboratory Y axis. To corroborate (or refute) kinematic changes with traditional measures, CoM displacements prior to and proceeding movement onset were analysed with a repeated-measures one-way ANOVA to examine the effect of reaching direction.
Results
Anticipatory trunk muscle activity and angular displacements for principal directions of reach
Direction-specific patterns of anticipatory trunk muscle activity accompanied the onset of rotational kinematics and CoM acceleration in the direction of the desired target. Figure 3 shows typical arm and trunk muscle activity for the period immediately preceding and following the onset of reaching. For directions to the side ipsi-lateral to the moving arm (0° and 45°), the PDelr and to a lesser extent the Latr activated with the EOl, RAr, and the IOTrAr during the preparatory period. There was also an inhibition of the IOTrAl. Reaching movements to the centre (90°) and contra-laterally to the side of the moving arm (135º, 180º) were characterised by activation of the arm muscles, ADelr and Latl. This activity was accompanied with that of the GMaxr, RAl, and IOTrAl. Reaching to targets further rightwards also evoked activity in the EOl and LumESr (e.g. 180°).

Representative surface electromyographic (sEMG) activity (S03) for two ‘focal’ arm and 14 ‘postural’ trunk muscles over five directions of reaching (0°, 45°, 90°, 135°, and 180°). Traces show a period of 500-ms preceding and 250 ms post-movement onset. The shaded area represents the preparatory postural adjustment period (pPA), which was the focus of the current analysis. Muscle activity within this period occurring prior to movement onset (black dashed line) is highlighted in bold. From movement onset, an average delay from light onset (grey dashed, range 301–349 ms) has been added for illustrative purposes. Conventions for muscle naming can be found within the body and the abbreviation section of the text
Kinematic variables including angular displacements of the head, trunk, and pelvis, as well as whole-body CoM acceleration profiles in the medio-lateral (global x axis) and antero-posterior (global y axis) directions, are represented in Fig. 4. The most prominent axial movement to take place prior to focal movement onset of the rFIN was head rotation. For right-side directions (ipsi-lateral to the moving arm), the head began to rotate counterclockwise slightly before the onset of the arm movement, while shifting to clockwise rotation for left-sided targets (contra-lateral to the moving arm). While no head rotation was present for the anteriorly placed 90° target, a slight clockwise pelvic rotation occurred prior to arm movement onset. Regardless of direction, angular changes in thoracic rotation, head tilt, trunk flexion/extension, and pelvic tilt did not occur until after movement of the reaching arm. Acceleration of the CoM was evident during the preparatory period and consistent with the lateral rather than the anterior component as directions of reaching deviated from the midline (90°). That is, for the right-side targets, CoM accelerated laterally to the right and conversely to the left once movements crossed the midline (e.g. 135°, 180°).

Mean kinematic changes, including angular displacement and centre of mass (CoM) accelerations for five directions (0°, 45°, 90°, 135°, and 180°). Traces are aligned to the same time frame as shown in Fig. 3. Due to the magnitude of movement required for the most laterally placed targets (e.g. 0°/180°), angular displacements have been aligned to different scales. This can be found in the top left of the respective direction and angular displacement plot. Angular conventions are illustrated in Fig. 2b (for further explanation, see “Materials and methods” section). CoM acceleration profiles are divided into their antero-posterior (y axis: dashed line) and medio-lateral (x axis: circle line) counterparts. Positive (plus symbol) values align with global axes highlighted in Fig. 2a
Trunk muscle activity is ‘tuned’ to the direction of reach
Normalised activity of the sampled trunk and arm muscles is represented in Fig. 5. The periods of pPA1 and pPA2 generally showed minimal muscle activity for all muscles over all directions, and as such, we focussed on the final three epochs (pPA3, pPA4, and pPA5), or 150 ms prior to movement.

Representative tuning curves (S03) for ‘focal’ arm and ‘postural’ trunk muscles show the evolution of muscle activity during the final three phases of the preparatory postural adjustment period (pPA 3–5) over all 13 directions of movement. Each 50-ms epoch, or bin, consists of the collation of normalised activity for single trials (filled circles), highlighting inter-trial variability, while the mean response (filled line) provides evidence of specific and direction-dependent activity. Muscle naming conventions can be found within the text and the abbreviation section of this manuscript
Focal arm muscles showed peak activation values for ipsi-lateral targets with the PDelr initially responsible for shoulder movement to targets at the farthest right (0°–30°) before crossing over to the ADelr after the 45° target and continuing for the remaining ipsi-lateral targets. Postural muscles including Latr, IOTrAr, LumESr, and GMaxl showed greater activation during similar eccentrically located directions of reaching to the PDelr, while the RAr began to peak alongside ADelr. As targets moved beyond the centrally located 90°, crossing the midline of the body to the contra-lateral side, a different set of postural muscles produced peak activations. RAl, EOr, and GMaxr showed greater activations that remained stable over the remaining left-side targets, while Latl, IOTrAl, and LumESl increased in normalised activity as targets increased in eccentricity (e.g. 120°–180°). For most bilateral pairs of postural muscles, a similar, yet opposing, pattern of activation was apparent. A clear example of this activity arises in the linear-type responses in the IOTrAr/l muscle pair (Fig. 5: IOTrA, pPA5), with a shifting of peak activity occurring as reaching crossed the midline (90°). An exception to this was the asymmetrical activity between the superficial EOr/l muscle pair as the EOl produced a bimodal response for lateral targets, reducing in peak activity for more central targets. Activity from the Multr/l pairing showed very little variation from its tonic state across direction.
Functional groups of superficial trunk muscles contribute to direction of CoM displacement
Pooled tuning curves of all nine participants for the final epoch preceding movement onset (pPA5) are shown in Fig. 6a. Evidence of the consistency in muscle activations across all participants allowed muscles to be grouped, signifying similar contributions to a particular set of reaching directions. A summary of these contributions presented in relation to the experimental set-up highlighted three identifiable functional groupings with directional biases. Ipsi-lateral targets (Fig. 6b; Group I) tended to call upon muscles located on the right side of the body, while activation of left-sided musculature dominated movement to contra-lateral targets (Fig. 6b; Group III). Exceptions to this trend arose from the EOr/l and GMaxr muscles which produced greater activity in the opposite fashion. Central targets requiring less rotation (Fig. 6b; Group II) utilised anteriorly located muscles including the RAr/l pairing and ADelr.

Individual muscle tuning curves (a) and combined summary tuning plot (b) of the muscle activity for the final 50-ms epoch (pPA5) preceding movement onset, pooled for all experimental subjects (n = 9). a Tuning curves for individual muscles (see Fig. 5 for explanation) are aligned into three groups based on the direction of primary peak activation. Ipsi-lateral, central, or contra-lateral distinctions were made in relation to the dominant reaching arm (i.e. right-sided reaching). b Muscles highlighted with similar spatial activation patterns in a have been combined together in a polar plot (representative of the reaching array) to identify potential functional muscle groupings produced during the preparatory postural adjustment period. Polar plots were constructed using an average value of normalised activity within and between each muscle of a group (i.e. within each tuning curve plot and between each muscle present in a single group) for each of the 13 directions of reaching. Naming conventions can be found within “Materials and methods” section of the text and the abbreviation section of this manuscript
Figure 7 highlights the displacement of the CoM during the preparatory epochs depicted for muscle tuning curves (Fig. 7a–c) and the proceeding 250 ms after arm movement onset (Fig. 7d) over all directions. Regardless of where participants were required to reach, mean displacement was always in the direction of the respective target (Fig. 7d). For directions 0°–30°, a clear evolution of the trajectory in the direction of the target on the side ipsi-lateral to the moving arm was present (Fig. 7a). For 45° and 105° (and to a lesser extent 90°) targets, there is a slight movement during pPA3 and pPA4 opposite to the direction of the movement (albeit very small, see Fig. 7b). During the same preparatory period, targets 60° and 75° show only progressive anterior displacement of the CoM. For targets 120°–180°, a clear counter movement of the CoM in the medio-lateral plane was seen during pPA3 and pPA4, before trajectories moved in the direction of the target (Fig. 7c). Despite the increased counter movement and involvement of different muscle groupings, total displacement of the CoM was not significantly different between directions (p = 0.172).

Evolution of centre of mass (CoM) displacement for ipsi-lateral (a), ipsi-central (b), and contra-lateral (c) directions of reaching during the preparatory phase (pPA3–5), and continued trajectories 250-ms proceeding movement onset (d). For each direction (a–c), CoM trajectories (grey) and mean displacement values (open circles) corresponding to the preparatory epochs pPA3, pPA4, and pPA5 are presented. Filled lines intersecting at values of preparatory mean displacement are representative of the variability (1 SD) in CoM position for the antero-posterior (y axis) and medio-lateral (x axis) planes. Linestyles for similar directions of CoM displacement occurring after movement onset (d) are defined based on previous groups of evolution (ipsi-lateral: filled; ipsi-central; dashed; contra-lateral; circled)
Discussion
The current study was undertaken to investigate whether the activity of multiple trunk muscles was, during the time period immediately preceding the onset of reaching movements in different directions, consistent with that expected to minimise CoM displacements. Our findings showed that activation largely occurred in the muscles ipsi- (and not contra-) lateral to the side of the impending movement. Therefore, our findings seem not to align with the traditional view in terms of the role of APAs. Rather, the direction of the resulting CoM and segmental displacements in relation to the direction-dependent trunk muscle activity suggests that a role in task initiation may be more applicable. Moreover, our results showed that the muscles were functionally grouped to promote movement instead of strict trunk stability during the preparatory phase.
The role of the trunk musculature in preparation for reaching during stance
The patterns of trunk muscle activity characterised in the set of 16 muscles across all 13 directions of movement evolved to follow the desired direction of arm movement. Many of the bilateral pairs of postural trunk muscles presented with reciprocal tuning curves, showing peak activity on either side of the target array (see Fig. 5). While directional specificity for trunk muscles has already been demonstrated (Tyler and Hasan 1995; Hodges et al. 1999, 2000; Allison et al. 2008; Santos and Aruin 2008; Morris et al. 2012, 2013), our patterns of peak activation were in contrast to previously reported findings for postural adjustments prior to voluntary movements. In fact, a general strategy involving a large proportion of the musculature on the same side as that of the movement (e.g. see Groups I and III, Fig. 6b) is evident, the only deviation from that pattern being the contra-lateral EO and GMax muscles. From a structural perspective, when these grouped muscles are considered as a single unit, the anatomy and lines of actions can be linked as functional agonist pairings for ipsi-lateral rotation, or simply, movement occurring to the same side as the desired targets. This is an interesting finding as emphasis has previously been placed largely on the muscle activity contra-lateral to the limb being moved, especially of the IOTrA, which is often the first to activate (Hodges and Richardson 1999; Hodges et al. 2000; Tsao et al. 2009; Massé-Alarie et al. 2012). Such activity has been considered to be indicative of a strategy used to control trunk orientation (Hodges et al. 1999, 2000) rather than minimise CoM position (Bouisset and Zattara 1981; Aruin and Latash 1995), as it is accompanied by movement of the trunk that is both prior to, and occurring in the direction opposite to the expected resultant motion required to produce the self-induced perturbation.
Both the aforementioned, trunk orientation and CoM position, have been implicated as primary controlled variables of the CNS in movement planning. Based on the lack of preparatory trunk movement (the head was the only segment to show changes prior to focal movement onset, especially in rotation), it would have been difficult to delineate whether and how orientation was a controlled variable in the current study. However, the disparity between recorded preparatory trajectories of CoM (Fig. 7a–c) from traditional approaches for a range of the directions studied may provide insight into CNS involvement in controlling CoM position. In our study, evolution of the CoM position preceding focal movement onset highlighted displacement towards the target rather than in opposition for both ipsi-lateral (right-sided) and anteriorly placed targets. Contra-lateral targets retained a similar anterior component of displacement but also showed a counter lateral movement of the CoM, moving towards the desired target at the period of focal movement onset. While this seems to partially affirm traditional views, counter movement of the CoM may not be related to direct trunk movement (and thus CoM displacement minimisation) but rather to the shift involved in loading the contra-lateral limb. Indeed, this has been shown to assist in the production of GRF needed to attain the target (Leonard et al. 2009). The current study did not record lower limb activity; however, based on experimental results using the same procedures and set-up (Leonard et al. 2009), a hypothesis can be formulated whereby the contra-lateral lower limb and ipsi-lateral trunk musculature act together to drive the body towards the goal. If this is the case, the question becomes; what is the priority of the CNS in voluntary movement during that preparatory phase?
Before an answer to the above can be given, it must be considered that the specific pattern of muscle activation may simply be a manifestation of the task constraints (and thus a representation of motor equivalence—Rothwell 1987). Put simply, as the instruction to participants was to conserve a stance configuration when reaching to targets ‘beyond reach’, it may have been that the CNS had no choice other than to produce trunk muscle activity to displace the CoM towards the target. If so, when presented with target distances ‘within-reach’, the characteristics of the tuning displayed by the trunk muscles might well be different, reflecting previously mentioned needs to conserve trunk orientation (Hodges et al. 1999, 2000).
To investigate this, a subsample of the original cohort (n = 5) conducted movements that were considered ‘within-reach’, to distances of 70 and 100 % arm’s length (likely requiring only an outstretching of the arm to the target). Due to the reduced involvement of trunk displacement required to achieve completion of the task to those two distances, it was thought that activation patterns displayed for the ‘beyond-reach’ distance (130 %) would show a significant change in their tuning curves in the opposite direction to only maintain stability and not contribute to the movement of the arm to the target. However, despite slight variations between subjects, a majority of activation patterns for within-reaching distances (see Fig. 8; 70 %—black, solid; 100 %—black, dashed) concurred with our beyond-arm reaching distance (see Fig. 8; grey, dashed). Greater directional involvement of the RA for anteriorly placed targets supports the increased need for trunk movement to attain these targets (and therefore may be an example of motor equivalence), yet surprisingly IOTrA (and to a lesser extent Lat and EO) continued to show similar tuning regardless of reaching distance. This is particularly interesting as these deeper muscles are often associated with motor control theories that propose CoM stabilisation as a mechanism for APAs.

Muscle tuning curves for ‘focal’ arm and ‘postural’ trunk muscles of five participants over three reaching distances during the final phase of the preparatory postural adjustment period (pPA5). Mean responses of normalised activity provide evidence of consistent activation patterns for targets both within (70 %: black, filled; 100 %: black, dashed) and beyond (130 %: grey, dashed)-arm reaching distance. Muscle naming conventions can be found within the text and the abbreviation section of this manuscript
Therefore, our data comparing 70, 100, and 130 % distances on the whole support the notion that trunk muscle activity during multidirectional reaching contributes to the arm movement itself rather than strictly stabilising the trunk. Therefore, perhaps the answer to this question concerning the priority of the CNS during the preparatory phase lies in the different voluntary tasks chosen to study posture and movement coordination.
Does nature of the voluntary task determine preparatory trunk muscle activity?
Much of the previous work outlining the anticipatory role of the trunk in voluntary movements has focused on an arm-raising paradigm and the subsequent role of deep trunk muscles as stabilisers (Hodges et al. 1999, 2000; Moseley et al. 2002; Lee et al. 2009; Tsao et al. 2009; Massé-Alarie et al. 2012; Morris et al. 2012, 2013; Abiko et al. 2015; Massé-Alarie et al. 2015). From the spatial and temporally invariant activation of the deeper muscles (respective to the superficial layers), motor control theories have been adapted for trunk control during movement. One proposal follows closely the classical parallel command put forth by Massion (1992) where a direction and time-independent postural command runs complementary, yet separately, to a movement-centric command. In the present study, bilateral recordings of IOTrA showed no suggestion of time-invariant activity. While we cannot rule out the separation of motor control demands, it is not the first instance of a deviation from the proposed theory. In fact, when APAs are compared for upper and lower limb movements, expected bilateral postural activity from IOTrA diminishes for the latter (removing the spatial invariance) and instead supports a task-specific strategy of control (Tokuno et al. 2013; Massé-Alarie et al. 2015). Further research focusing on bilateral recordings has also shown time-varying changes to occur with direction during arm-raises (Morris et al. 2012, 2013).
The commonality between these examples is their use of a single limb-raising paradigm (i.e. arm or leg raise) conducted within a space easily achieved without movement outside peri-personal space. This is in contrast to the whole-body involvement of the main condition analysed in the current study, requiring an explicit movement to a distance beyond-arm length (130 %) but where the CoM remains within the confines of the base of support. Despite these differences, the role of the trunk in both scenarios can still be explained by their contrasting muscle activation patterns, and as such, reflect the specific nature of their respective tasks. Unilateral arm-raises require the trunk to remain stable and therefore oppose activity from reactive torques produced by the arm. In our paradigm, it was necessary for the trunk to shift towards a desired goal, as the targets were placed beyond initial arm reach length (100 %). As the task does not require the CoM to shift outside the base of support offered by stance, it may be deemed appropriate that postural adjustments just preceding movement initiation should not be destined to minimise balance perturbations. In fact, an important distinction may need to be made around the use of a within- versus beyond-reach length paradigm. The addition of a limited data set (n = 5, see Fig. 8) would however not support such a distinction for goal-directed movement, as the 70 and 100 % conditions resulted in trunk muscle activity of approximately the same sign. A full analysis of postural adjustments in both the trunk and the lower limbs during reach movements in different directions and to different extents (within to beyond reach) is therefore warranted.
Interestingly, Kaminski (2007) analysed the interactions between joint couples of the upper and lower extremities and found that targets within the peri-personal space required a greater number of movement synergies indicative of a parallel, yet inter-dependent, focal, and postural strategy only for within arm length reaching. Greater congruency of the angular changes (as kinematic variance could better be explained by a combination of less movements, or a coupling of upper/lower extremity displacement to produce movement) for the beyond arm reach suggests that as reaching distance increases, the inherent complexity of movement decreases (Kaminski and Simpkins 2001), aligning with a combined focal/postural command. Also, APAs within trunk muscles have shown to occur earlier for anterior movements projecting beyond base of support, with the exception of the LumES muscle. The reduction in extensor activity as reach distance increases corroborates a movement production rather than stabilisation strategy (Tyler and Karst 2004). This, and our present findings, provides increasing evidence at both a kinematic and inter-muscular level, that task-specific strategies are employed by the CNS, and that they contribute in a manner reflecting movement initiation. While speculative, this would suggest that non-focal trunk muscles may stem from a common motor command.
How do the trunk muscles fit into a model of posture and movement coordination? Insights into neural control of posture and voluntary movement
Trunk muscles provide an interesting means of understanding postural and movement coordination as they are often implicated with bilateral, stabilising activity derived from anatomically based arguments surrounding their innervation (Holstege 1998). The descending neural drive of these proximal muscles is often attributed to the small percentage (15 %) of ventral cortico-spinal tract fibres running ipsi-laterally and known to act in a bilateral manner (Tunstill et al. 2001). This is in contrast to the larger and fast conducting, lateral cortico-spinal tract responsible for distal, contra-lateral musculature, and especially important in fine hand function. In terms of the organisation of posture and movement, this study has shown that a subset of 16 muscles appears not to stabilise, but acts to participate in the movement linking closely the primary goal (i.e. target). Previous assertions for a goal-oriented response for the lower limb concur with this notion (Leonard et al. 2009). As lower limb and trunk muscles seem positively geared towards the same goal, it supports evidence of a higher integration of posture and movement (Massion 1992; Schepens and Drew 2003), such that shared postural/voluntary information is coded within same motor command and global movement plan. Often, the focus has been purely on the lower limb; however, based on our results, we can speculate about synergic control by the CNS (Ting and Macpherson 2005; Torres-Oviedo and Ting 2007; d’Avella and Lacquaniti 2013), and the possible structures and pathways implicated in the production of feed-forward adjustments. Particularly, the reticulo-spinal tract and associated ponto-medullary reticular formation have been closely aligned with both descending control of proximal musculature and the encoding of feed-forward APAs (Schepens and Drew 2003, 2004, 2006; Schepens et al. 2008).
From a neuroanatomical perspective, direct cortico-motoneuronal connections may assist in the formation or emphasis of muscular synergies (Lemon 2008). While the cortico-spinal tracts connect onto small numbers of motoneuron pools, reticulo-spinal connections arborise extensively throughout the spinal cord and can contact many neuronal pools, with the same fibre known to act on both cervical and lumbar enlargements (Matsuyama et al. 1999, 2004). If these have been encoded within a global command, it may be able to exploit functional synergies thought to be present within lower spinal interneurons (Giszter et al. 1993). Does the reticulo-spinal tract utilise this connectivity for production of pPAs? Comparisons of feed-forward postural responses of abdominal muscles to voluntary contraction and reflexive acoustic startle showed that APAs were slightly later in onset than reflexive manoeuvres yet always faster than voluntary-induced movement, even with increased motoneuron excitability via respiratory drive and presence of loud stimuli (Tsao et al. 2009). This could indicate that even fast cortico-spinal pathways are slower than those producing APAs. Whether this implies the use of wide-reaching reticulo-spinal tract to elicit synergies over leg, trunk, and arm is yet to be investigated.
In conclusion, characterisation of muscle activity in the present study supports the utilisation of muscle synergies, yet greater emphasis on the temporal interactions is required to clearly parse out muscular synergies within the trunk. How (and where) these possible feed-forward postural synergies are encoded by the CNS cannot be delineated from current results but are suggestive of a shared, global command between focal and non-focal muscles.
Abbreviations
- sEMG:
-
Surface electromyography
- APAs:
-
Anticipatory postural adjustments
- CoM:
-
Centre of mass
- CoP:
-
Centre of pressure
- CNS:
-
Central nervous system
- ADelr :
-
Right anterior deltoid muscle
- PDelr :
-
Right posterior deltoid muscle
- Latr :
-
Right latissimus dorsi muscle
- Latl :
-
Left latissimus dorsi muscle
- GMaxr :
-
Right gluteus maximus muscle
- GMaxl :
-
Left gluteus maximus muscle
- GRF:
-
Ground reaction forces
- LumESr :
-
Right lumbar erector spinae muscle
- LumESl :
-
Left lumbar erector spinae muscle
- Multr :
-
Right lumbar multifidus muscle
- Multl :
-
Left lumbar multifidus muscle
- EOr :
-
Right external oblique muscle
- EOl :
-
Left external oblique muscle
- RAr :
-
Right rectus abdominis muscle
- RAl :
-
Left rectus abdominis muscle
- IOTrAr :
-
Right (combined) internal oblique/transversus abdominis muscle
- IOTrAl :
-
Left (combined) internal oblique/transversus abdominis muscle
- pPAs:
-
Preparatory postural adjustments
References
Abiko T, Shimamura R, Ogawa D, Abiko Y, Hirosawa M, Momose N et al (2015) Difference in the electromyographic onset of the deep and superficial multifidus during shoulder movement while standing. PLoS One 10(4):e0122303
Allison GT, Morris SL (2008) Transversus abdominis and core stability: has the pendulum swung? Br J Sports Med 42(11):930–931
Allison GT, Morris SL, Lay B (2008) Feedforward responses of transversus abdominis are directionally specific and act asymmetrically: implications for core stability theories. J Orthop Sports Phys Ther 38(5):228–237
Aruin AS, Latash ML (1995) Directional specificity of postural muscles in feedforward postural reactions during fast voluntary arm movements. Exp Brain Res 103:323–332
Belenkii VY, Gurfinkel VS, Paltsev YI (1967) Elements of control of voluntary movements. Biophysics 12:154–161
Bouisset S, Zattara M (1981) A sequence of postural movements precedes voluntary movement. Neurosci Lett 22:263–270
Bouisset S, Zattara M (1987) Biomechanical study of the programming of anticipatory postural adjustments associated with voluntary movement. J Biomech 20:735–742
Caronni A, Bolzoni F, Esposito R, Bruttini C, Cavallari P (2013) Accuracy of pointing movement relies upon a specific tuning between anticipatory postural adjustments and prime mover activation. Acta Physiol 208:111–124
Commissaris DACM, Toussaint HM, Hirschfeld H (2001) Anticipatory postural adjustments in a bimanual, whole body lifting task seem not only aimed at minimising anteroposterior centre of mass displacements. Gait Posture 14:44–55
Crenna P, Frigo C (1991) A motor programme for the initiation of forward-oriented movements in humans. J Physiol 427:635–653
d’Avella A, Lacquaniti F (2013) Control of reaching movements by muscle synergy combinations. Front Comput Neurosci 7:42
Delis I, Berret B, Pozzo T, Panzeri S (2013) Quantitative evaluation of muscle synergy models: a single-trial task decoding approach. Front Comput Neurosci 7:8
Eng JJ, Winter DA, MacKinnon CD, Patla AE (1992) Interaction of the reactive moments and center of mass displacement for postural control during voluntary arm movements. Neurosci Res Commun 11(2):73–80
Fautrelle L, Berret B, Chiovetto E, Pozzo T, Bonnetblanc F (2010) Equilibrium constraints do not affect the timing of muscular synergies during the initiation of a whole body reaching movement. Exp Brain Res 203(1):147–158
Friedli WG, Hallett M, Simon SR (1984) Postural adjustments associated with rapid voluntary arm movements. 1. Electromyographic data. J Neurol Neurosurg Psychiatry 47:611–622
Gibson J, McCarron T (2004) Feedforward muscle activity: an investigation into the onset and activity of internal oblique during two functional reaching tasks. J Bodyw Mov Ther 8(2):104–113
Giszter SF, Mussa-Ivaldi FA, Bizzi E (1993) Convergent force fields organized in the frog’s spinal cord. J Neurosci 13(2):467–491
Hermens HJ, Freriks B, Disselhorst-Klug C, Rau G (2000) Development of recommendations for sEMG sensors and sensor placement procedures. J Electromyogr Kinesiol 10(5):361–374
Hodges PW, Richardson CA (1997a) Relationship between limb movement speed and associated contraction of the trunk muscles. Ergonomics 40(11):1220–1230
Hodges PW, Richardson CA (1997b) Contraction of the abdominal muscles associated with movement of the lower limb. Phys Ther 77(2):132–142
Hodges PW, Richardson CA (1999) Transversus abdominis and the superficial abdominal muscles are controlled independently in a postural task. Neurosci Lett 265(2):91–94
Hodges PW, Cresswell AG, Thorstensson A (1999) Preparatory trunk motion accompanies rapid upper limb movement. Exp Brain Res 124(1):69–79
Hodges PW, Cresswell AG, Daggfeldt K, Thorstensson A (2000) Three dimensional preparatory trunk motion precedes asymmetrical upper limb movement. Gait Posture 11(2):92–101
Hodges PW, Cresswell AG, Thorstensson A (2001) Perturbed upper limb movements cause short-latency postural responses in trunk muscles. Exp Brain Res 138(2):243–250
Holstege G (1998) The anatomy of the central control of posture: consistency and plasticity. Neurosci Biobehav Rev 22(4):485–493
Hua S, Leonard JA, Hilderley AJ, Stapley PJ (2013) Postural configuration does not alter unperturbed or perturbed reach movement kinematics. Exp Brain Res 227(1):63–78
Kaminski TR (2007) The coupling between upper and lower extremity synergies during whole body reaching. Gait Posture 26(2):256–262
Kaminski TR, Simpkins S (2001) The effects of stance configuration and target distance on reaching. I. Movement preparation. Exp Brain Res 136:439–446
Krishnamoorthy V, Latash ML, Scholz JP, Zatsiorsky VM (2003) Muscle synergies during shifts of the center of pressure by standing persons. Exp Brain Res 152:281–292
Kuo FC, Kao WP, Chen HI, Hong CZ (2011) Squat-to-reach task in older and young adults: kinematic and electromyographic analyses. Gait Posture 33(1):124–129
Lee LJ, Coppieters MW, Hodges PW (2009) Anticipatory postural adjustments to arm movement reveal complex control of paraspinal muscles in the thorax. J Electromyogr Kinesiol 19(1):46–54
Lemon RN (2008) Descending pathways in motor control. Annu Rev Neurosci 31:195–218
Leonard JA, Brown RH, Stapley PJ (2009) Reaching to multiple targets during stance: the spatial organization of feed-forward postural adjustments. J Neurophysiol 101:2120–2133
Leonard JA, Gritsenko V, Ouckama R, Stapley PJ (2011) Postural adjustments for online corrections of arm movements in standing humans. J Neurophysiol 105:2375–2388
Marshall P, Murphy B (2003) The validity and reliability of surface EMG to assess the neuromuscular response of the abdominal muscles to rapid limb movement. J Electromyogr Kinesiol 13(5):477–489
Massé-Alarie H, Flamand VH, Moffet H, Schneider C (2012) Corticomotor control of deep abdominal muscles in chronic low back pain and anticipatory postural adjustments. Exp Brain Res 218(1):99–109
Massé-Alarie H, Beaulieu LD, Preuss R, Schneider C (2015) Task-specificity of bilateral anticipatory activation of the deep abdominal muscles in healthy and chronic low back pain populations. Gait Posture 41(2):440–447
Massion J (1992) Movement, posture and equilibrium: interaction and coordination. Prog Neurobiol 38:35–56
Matsuyama K, Mori F, Kuze B, Mori S (1999) Morphology of single pontine reticulospinal axons in the lumbar enlargement of the cat: a study using the anterograde tracer PHA-L. J Comp Neurol 410(3):413–430
Matsuyama K, Mori F, Nakajima K, Drew T, Aoki M, Mori S (2004) Locomotor role of the corticoreticular–reticulospinal–spinal interneuronal system. Prog Brain Res 143:239–249
Merletti R, Rainoldi A, Farina D (2001) Surface electromyography for noninvasive characterization of muscle. Exerc Sport Sci Rev 29(1):20–25
Mochizuki G, Ivanova TD, Garland SJ (2004) Postural muscle activity during bilateral and unilateral arm movements at different speeds. Exp Brain Res 155:352–361
Moore S, Brunt D, Nesbitt ML, Juarez T (1992) Investigation of evidence for anticipatory postural adjustments in seated subjects who performed a reaching task. Phys Ther 72(5):335–343
Morris SL, Allison GT (2006) Effects of abdominal muscle fatigue on anticipatory postural adjustments associated with arm raising. Gait Posture 24(3):342–348
Morris SL, Lay B, Allison GT (2012) Corset hypothesis rebutted—transversus abdominis does not co-contract in unison prior to rapid arm movements. Clin Biomech 27(3):249–254
Morris SL, Lay B, Allison GT (2013) Transversus abdominis is part of a global not local muscle synergy during arm movement. Hum Mov Sci 32(5):1176–1185
Moseley GL, Hodges PW, Gandevia SC (2002) Deep and superficial fibers of the lumbar multifidus muscle are differentially active during voluntary arm movements. Spine 27(2):E29–E36
Ng JK, Kippers V, Richardson CA (1998) Muscle fibre orientation of abdominal muscles and suggested surface EMG electrode positions. Electromyogr Clin Neurophysiol 38(1):51–58
Oddsson L, Thorstensson A (1987) Fast voluntary trunk flexion movements in standing: motor patterns. Acta Physiol Scand 129(1):93–106
Park RJ, Tsao H, Cresswell AG, Hodges PW (2014) Anticipatory postural activity of the deep trunk muscles differs between anatomical regions based on their mechanical advantage. Neuroscience 261:161–172
Pozzo T, Ouamer M, Gentil C (2001) Simulating mechanical consequences of voluntary movement upon whole-body equilibrium: the arm-raising paradigm revisited. Biol Cybern 85(1):39–49
Ramos CF, Stark LW (1990) Postural maintenance during fast forward bending: a model simulation experiment determines the “reduced trajectory”. Exp Brain Res 82(3):651–657
Rothwell JC (1987) Control of human voluntary movement. Croom Helm, Kent
Santos MJ, Aruin AS (2008) Role of lateral muscles and body orientation in feedforward postural control. Exp Brain Res 184:547–559
Schepens B, Drew T (2003) Strategies for the integration of posture and movement during reaching in the cat. J Neurophysiol 90(5):3066–3086
Schepens B, Drew T (2004) Independent and convergent signals from the pontomedullary reticular formation contribute to the control of posture and movement during reaching in the cat. J Neurophysiol 94:2217–2238
Schepens B, Drew T (2006) Descending signals from the pontomedullary reticular formation are bilateral, asymmetric and gated during reaching movements in the cat. J Neurophysiol 96:2229–2252
Schepens B, Stapley PJ, Drew T (2008) Neurones in the pontomedullary reticular formation signal posture and movement both as an integrated behaviour and independently. J Neurophysiol 100:2235–22548
Shabbott BA, Sainburg RL (2009) On-line corrections for visuomotor errors. Exp Brain Res 195:59–72
Stapley P, Pozzo T, Grishin A (1998) The role of anticipatory postural adjustments during forward whole body reaching movements. Neuroreport 9:395–401
Stapley PJ, Pozzo T, Cheron G, Grishin A (1999) Does the coordination between posture and movement during human whole-body reaching ensure center of mass stabilization? Exp Brain Res 129:134–146
Swinnen E, Baeyens JP, Meeusen R, Kerckhofs E (2012) Methodology of electromyographic analysis of the trunk muscles during walking in healthy subjects: a literature review. J Electromyogr Kinesiol 22(1):1–12
Ting LH, Macpherson JM (2005) A limited set of muscle synergies for force control during a postural task. J Neurophysiol 93(1):609–613
Tokuno CD, Cresswell AG, Thorstensson A, Carpenter MG (2013) Recruitment order of the abdominal muscles varies with postural task. Scand J Med Sci Sports 23(3):349–354
Torres-Oviedo G, Ting LH (2007) Muscle synergies characterizing human postural responses. J Neurophysiol 98:2144–2156
Tsao H, Galea MP, Hodges PW (2009) How fast is feedforward postural adjustments of the abdominal muscles? Behav Neurosci 123(3):687
Tunstill SA, Wynn-Davies AC, Nowicky AV, McGregor AH, Davey NJ (2001) Corticospinal facilitation studied during voluntary contraction of human abdominal muscles. Exp Physiol 86(01):131–136
Tyler AE, Hasan Z (1995) Qualitative discrepancies between trunk muscle activity and dynamic postural requirements at the initiation of reaching movements performed while sitting. Exp Brain Res 107(1):87–95
Tyler AE, Karst GM (2004) Timing of muscle activity during reaching while standing: systematic changes with target distance. Gait Posture 20(2):126–133
Urquhart DM, Barker PJ, Hodges PW, Story IH, Briggs CA (2005a) Regional morphology of the transversus abdominis and obliquus internus and externus abdominis muscles. Clin Biomech 20(3):233–241
Urquhart DM, Hodges PW, Allen TJ, Story IH (2005b) Abdominal muscle recruitment during a range of voluntary exercises. Man Ther 10(2):144–153
Urquhart DM, Hodges PW, Story IH (2005c) Postural activity of the abdominal muscles varies between regions of these muscles and between body positions. Gait Posture 22(4):295–301
Winter DA (1995) Human balance and posture control during standing and walking. Gait Posture 3(4):193–214
Zattara M, Bouisset S (1988) Posturo-kinetic organisation during the early phase of voluntary upper limb movement. 1. Normal subjects. J Neurol Neurosurg Psychiatry 51(7):956–965
Acknowledgments
The authors would like to thank Mrs. Sophie Bos, Mr. Joel Walsh, and Mr. Sergio Jimenez for their technical assistance during data collection and Ms. Jessica Fay for the anatomical illustrations.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors state that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Stamenkovic, A., Stapley, P.J. Trunk muscles contribute as functional groups to directionality of reaching during stance. Exp Brain Res 234, 1119–1132 (2016). https://doi.org/10.1007/s00221-015-4536-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-015-4536-x