
Abstract
Human locomotor adaptation requires feedback and feed-forward control processes to maintain an appropriate walking pattern. Adaptation may require the use of visual and proprioceptive input to decode altered movement dynamics and generate an appropriate response. After a person transfers from an extreme sensory environment and back, as astronauts do when they return from spaceflight, the prolonged period required for re-adaptation can pose a significant burden. In our previous paper, we showed that plantar tactile vibration during a split-belt adaptation task did not interfere with the treadmill adaptation however, larger overground transfer effects with a slower decay resulted. Such effects, in the absence of visual feedback (of motion) and perturbation of tactile feedback, are believed to be due to a higher proprioceptive gain because, in the absence of relevant external dynamic cues such as optic flow, reliance on body-based cues is enhanced during gait tasks through multisensory integration. In this study, we therefore investigated the effect of optic flow on tactile-stimulated split-belt adaptation as a paradigm to facilitate the sensorimotor adaptation process. Twenty healthy young adults, separated into two matched groups, participated in the study. All participants performed an overground walking trial followed by a split-belt treadmill adaptation protocol. The tactile group (TC) received vibratory plantar tactile stimulation only, whereas the virtual reality and tactile group (VRT) received an additional concurrent visual stimulation: a moving virtual corridor, inducing perceived self-motion. A post-treadmill overground trial was performed to determine adaptation transfer. Interlimb coordination of spatiotemporal and kinetic variables was quantified using symmetry indices and analyzed using repeated-measures ANOVA. Marked changes of step length characteristics were observed in both groups during split-belt adaptation. Stance and swing time symmetries were similar in the two groups, suggesting that temporal parameters are not modified by optic flow. However, whereas the TC group displayed significant stance time asymmetries during the post-treadmill session, such aftereffects were absent in the VRT group. The results indicated that the enhanced transfer resulting from exposure to plantar cutaneous vibration during adaptation was alleviated by optic flow information. The presence of visual self-motion information may have reduced proprioceptive gain during learning. Thus, during overground walking, the learned proprioceptive split-belt pattern is more rapidly overridden by visual input due to its increased relative gain. The results suggest that when visual stimulation is provided during adaptive training, the system acquires the novel movement dynamics while maintaining the ability to flexibly adapt to different environments.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Patterns of human locomotion are highly adaptive and flexible, depending on the environmental context. Changing environmental conditions require the system to adapt to meet the demands of the new environment (MacLellan and Patla 2006) and to ensure that postural stability is maintained. Locomotor adaptation is characterized by a continuous accommodation of the neuromuscular system in the presence of particular internal and external conditions which affect the outcome of generated movements. A significant contribution to the process of adaptation is provided by lower-limb proprioceptive input, allowing for the appreciation of the altered environmental dynamics and the subsequent generation of an appropriate locomotor movement pattern (Reisman et al. 2005).
Exposure to a split-belt treadmill environment causes behavioral changes which occur on multiple timescales. On short timescales, changes entail immediate alterations in movement patterns to accommodate the environmental dynamics, typically observed in intralimb parameters (Mawase et al. 2013) and occur as a result of changes in mechanical interactions with the environment only. The new movement patterns emerge within a few gait cycles of exposure and are only observed as long as the altered environmental dynamics are present. These reactive changes are neither stored nor carried over to environmental contexts with different dynamics (Reisman et al. 2005; Mawase et al. 2013). On longer timescales on the other hand, adaptive changes entail long-term reorganization of sensorimotor interactions in the central nervous system. Adaptation is reflected in retention of learned locomotor patterns and a carryover to environments different from those in which learning took place (Reisman et al. 2009), primarily when the adapted gait parameters require complex interlimb coordination (Reisman et al. 2005; Mawase et al. 2013). Such coordination requires temporal shifts in the muscle activation patterns, and the most likely mechanism is believed to be proprioceptive feedback of the asymmetric task (Maclellan et al. 2014).
Both visual and plantar tactile sensory input can provide information on the environment and one’s movement through it, particularly during locomotor adaptation. Plantar cutaneous mechanoreceptors in particular provide critical information to the central nervous system about the subject’s interaction with the environment during locomotion (Kavounoudias et al. 1998). Direct plantar cutaneous electrical stimulation affects afferent feedback during locomotion, resulting in abnormal foot orientation and placement during locomotion (Zehr et al. 2014). These activation patterns have been observed to be phase dependent, suggesting that cutaneous plantar perception is required to maintain complex interlimb phasing, or coordination, during locomotion (Zehr and Haridas 2003). Visual information in the form of optic flow is used to perceive self-motion and characteristics of the environment in extrapersonal space necessary for varied tasks including navigation (Warren et al. 2001) and obstacle avoidance (Fajen 2013) and is specifically coupled to spatial characteristics of locomotion (Katsavelis et al. 2010) and locomotor adaptive behavior (Prokop et al. 1997). In split-belt locomotion specifically, optic flow velocity that was not coupled to the belt velocity of the limb in the stance phase but was coupled to the belt velocity of the current limb in swing or the subsequent limb in stance, facilitated the rate of split-belt adaptation (Finley et al. 2014). It has been shown that body-based proprioceptive cues are weighed higher than dynamic optic flow cues for gait estimation tasks while walking in place (Campos et al. 2014). However, the assessment of sensory contributions while actually performing walking has shown that visual cues are weighed higher and manipulation of visual cues increases gait variability (Chien et al. 2014).
In our previous paper, we showed that plantar tactile vibration during a split-belt adaptation task led to larger transfer effects to overground walking without interfering with the adaptation on the treadmill (Mukherjee et al. 2015). The persistent transfer effect with a slower decay in that study was believed to be due to the split-belt adaptation achieved through a higher proprioceptive gain in the tactile group in the absence of visual feedback (of motion) and perturbation of tactile feedback. This is because, in the absence of visual cues, reliance on body-based cues is enhanced during gait tasks through multisensory integration (Campos et al. 2014; Green and Angelaki 2010). The control group in the study by Mukherjee et al. (2015) had intact tactile feedback, but also received no visual feedback of motion. This study aimed to continue that investigation by exploring the effect of optic flow (providing visual perception of self-motion) on tactile-perturbed split-belt adaptation. In the presence of visual feedback that provided a visual perception of self-motion, we expected that adaptation would not require an increase in proprioceptive gain and therefore, the observed persistence in transfer effects observed by Mukherjee et al. (2015) would be absent. Optic flow may provide a viable alternative for feedback information allowing for more rapid adaptation to an overground locomotor task following split-belt walking.
Methods
Twenty healthy volunteers participated in the study (6 males, 14 females; age 26.2 ± 4.9, height 167.2 cm ± 9.3, weight 63.6 kg ± 12.6), separated into two age-matched groups. All subjects had normal or corrected-to-normal vision and were free of any cognitive or musculoskeletal impairment, which might affect gait or locomotor adaptation. Before experimentation took place, subjects were informed of the procedures and provided written consent. The institutional review board of the University of Nebraska Medical Center approved all procedures.
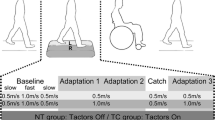
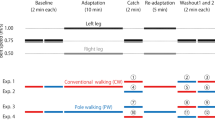
Subjects were asked to walk on a dual-belt instrumented treadmill (Bertec, Columbus, OH). Each belt was individually driven, allowing the belt speed to be independently controlled (split-belt) or driven in unison (tied-belt), depending on the treadmill condition (Fig. 1a). The instrumented treadmill accommodated the recording of ground reaction forces (GRFs) at 300 Hz through the dual force plates located underneath the belts. Kinematics were recorded using a 3D investigator motion-tracking system (60 Hz, Northern Digital Inc., Waterloo, Canada) to track smart marker clusters placed on the foot, shank, thigh, and sacrum. During treadmill locomotion, all participants wore a chest harness connected to a bodyweight support system (LiteGait; Mobility Research, Tempe, AZ) for safety. During locomotion, all participants were continuously exposed to supra-threshold plantar vibration, provided by vibrating tactile force transducers. In this study, a total of three circular C2 tactors, each 7.6 mm in diameter, were placed beneath the plantar surface of the feet (Engineering Acoustics Inc., Casselberry, FL). The three tactors were embedded in customized insoles, placed into the subject’s shoe. Two tactors were located laterally on the ball of the foot, one over the first and one over the fifth metatarsal head, and one was placed over the lower surface of the calcaneus. Each tactor vibrated at a nominal frequency of 250 Hz and an amplitude of 17.5 dB, parameters set according to results of a preliminary study. This study (unpublished data) indicated that this amplitude–frequency combination, in comparison with several other combinations, potentially maximized the explorative ability for significant adaptive changes. These vibration characteristics were specifically selected to induce a perturbation of mechanoreceptor sensitivity (Leung et al. 2005). While walking on the treadmill, half of the participants were exposed to a VR environment, providing optic flow paced at the treadmill belt velocity. The custom VR environment was created in the Vizard Virtual Reality Software Toolkit (Worldviz LLC, Santa Barbara, CA). The environment consisted of an endless virtual corridor with realistic side walls, projected by a set of three projectors (Optoma TX 774, Optoma Technology Inc., Milpitas, CA) onto a set of three flat screens (height 248 cm, width 172 cm; Stewart Filmscreen Corp., Torrance, CA). The central screen was positioned approximately 2 m in front of the subject. The two side-screens were positioned at an angle of 120° with the central screen.

a Experiment consisted of distinct phases: the overground preadaptation phase, the treadmill adaptation phase, and the overground post-adaptation phase. Following treadmill adaptation, participants were transferred to the overground location on a wheelchair. Locomotor adaptation was performed on the split-belt treadmill. On the treadmill, all participants were exposed to plantar tactile vibration from consistent tactor configurations on the left and right insoles in the TC and VRT groups. The treadmill belt configuration sequence was the same for all participants, and velocities were fixed as shown. b In the VRT group, participants were exposed to a full-view optic flow stimulus, consisting of a high-contrast black-and-white textured virtual hallway. Optic flow velocity was coupled to the velocity of the slow belt at all times
Participants were separated into two groups. The tactile (TC) group received only continuous plantar tactile vibration during the treadmill phase. The environment was darkened and the screens were blank, thereby minimizing the amount of visual reference points in the environment. The virtual reality and tactile (VRT) group received a combination of continuous plantar tactile vibration and optic flow, provided through virtual reality, during the treadmill phase. The treadmill belt velocities were the same in all participants and were either slow (0.5 m/s) or fast (1.0 m/s), depending on the particular condition (Reisman et al. 2009) (Fig. 1a). Optic flow moved at the same velocity as the left treadmill belt (0.5 m/s). The vertical location of the center of expansion was adjusted to match the participant’s eye height. Participants performed a number of overground and treadmill trials with tied and split-belt configurations. All participants performed an initial 120-s overground trial on an indoor jogging track, to determine pre-training step, stance, and swing times. Prior to the experimental treadmill trials, participants performed a 300-s familiarization trial on the treadmill to get acquainted with locomotion while fitted with tactors, footswitches and suspension harness. Seven treadmill walking trials followed, separated by consistent rest periods of 120 s. On the treadmill, participants were instructed to walk normally and look straight ahead. Participants started with a slow walking trial (0.5 m/s) for 120 s. Following the initial slow trial, participants walked for 120 s at a faster pace (1.0 m/s). The fast trial was followed by a second 120-s slow trial at 0.5 m/s. In the initial split-belt trial, participants walked with the right belt at 1.0 m/s (fast leg) and the left belt at 0.5 m/s (slow leg). This configuration was maintained for all participants. Two split-belt trials of 360 s each were performed in succession. Following the split-belt adaptation trials, participants performed a catch trial during which the belts were tied (0.5 m/s). Following the 120-s catch trial, participants performed a final 360-s split-belt trial. At the conclusion of the treadmill phase, participants were transported to the 200-m indoor jogging track via a wheelchair while wearing darkened goggles to block visual feedback, in order to ensure that transfer effects could be monitored in a controlled environment. The transfer to the jogging track took approximately 300 s. The experiment was concluded with a 120-s overground walking trial on the indoor jogging track to determine transfer effects (Fig. 1a).
Kinematic and kinetic walking parameters were calculated during the overground and treadmill walking trials. During the treadmill trials, spatiotemporal parameters were calculated to determine adaptation. Briefly, ground reaction force data were acquired from the force plates at 100 Hz. The heel-strike was considered to occur at the first frame in which the vertical component of the ground reaction force exceeded a threshold level of 10 N and continuously exceeded this threshold for 40 ms (Kiss 2010; Zeni et al. 2008). The toe-off event was considered to occur at the first frame in which the vertical component of the ground reaction force fell below the 10 N threshold, sustained continuously for 40 ms. This 10 N threshold was calculated as three times the standard deviation of the vertical ground reaction force during the initial 100 ms (100 frames) of the trial (Mickelborough et al. 2000). Successive unilateral events were used to determine stride length, and bilateral events were used to calculate step length. This calculation quantifies limb excursion rather than step and stride length as observed in overground locomotion. In the following discussion of these variables, limb excursion is addressed as stride length (unilateral) and step length (bilateral) (Hoogkamer et al. 2014). The spatial variables consisted of stride length (m) and step length (m), and the temporal variables consisted of stance time (s) and swing time (s). The stride length was calculated as the position change in the anterior–posterior direction from the time of heel-strike to the time of toe-off added to the position change from the time of toe-off to the time of ipsilateral heel-strike. Step length was calculated as the position change in anterior–posterior direction from the time of heel-strike to the time of the contralateral heel-strike. Stance time was calculated as the difference in time between the heel-strike and the toe-off events of the same leg, and swing time was calculated as the difference in time between the toe-off and the heel-strike events of the same leg.
During the overground trials, stride time, stance time, and swing time were calculated. Plantar vibration as applied in the current study was hypothesized to perturb plantar perception. Pressure distribution patterns display increased variability in such conditions of reduced perceptive sensitivity (Nurse and Nigg 2001; Eils et al. 2002), particularly reflected in the pressure–time integral, i.e., impulse (Bacarin et al. 2009). The GRFs recorded on the instrumented treadmill allowed for the calculation of anteroposterior and vertical impulse: apGRF and vGRF, respectively. Due to technical complications, GRF data were collected in 18 out of 20 participants. To quantify interlimb coordination, the symmetry index (SI) was calculated for all kinetic and kinematic locomotor parameters (Eq. 1).
The SI of locomotor parameter S was calculated as the difference between S of the fast limb and S of the slow limb, divided by the sum of the S of the two limbs. An SI of 0 represents perfect symmetry, a positive SI represents asymmetry with dominance of the fast limb, and a negative SI represents asymmetry with dominance of the slow limb. The resultant spatiotemporal parameters were stride length symmetry (SLS), step length symmetry (STLS), stance time symmetry (STS), and swing time symmetry (SWS).
For each subject, walking parameters were averaged for the first three gait cycles (early) and last three gait cycles (late) of each condition (Vasudevan and Bastian 2010). Walking parameters were compared within groups and between groups (TC, VRT). Initial adaptation was investigated by comparing slow baseline and early adaptation. Long-term adaptation was quantified as the difference between early split 1 and late split 2. Split-belt on-treadmill aftereffects were quantified as the difference between catch early and slow late trials. Each parameter was analyzed separately using a 2 (Group: TC, VRT) × 6 (Condition: slow late, adaptation 1 early, adaptation 2 late, catch early, catch late, adaptation 3 early) mixed-factor repeated-measures ANOVA with significant interactions analyzed by corrected post hoc t tests. Transfer effects were quantified overground as the difference between the pre- and post-treadmill walking parameters. Overground walking symmetry characteristics were analyzed in the temporal domain as STS and SWS. Overground parameters were analyzed using a 2 (Group: TC, VRT) × 2 (Condition: pre-treadmill, post-treadmill) repeated-measures ANOVA with significant interactions analyzed by corrected post hoc t tests. All post hoc t tests were corrected for multiple comparisons using the Bonferroni–Holm (BH) procedure. For all statistical tests, alpha was set at 0.05.
Results
Spatiotemporal treadmill adaptation
During treadmill locomotion, spatiotemporal symmetry parameters of locomotion and adaptation were recorded. Temporal gait characteristics are reported as STS and SWS. The symmetry indices are of opposite sign for SWS, compared to STS. Both gait characteristics are biomechanically linked and necessarily change in opposite directions. The STS showed a significant effect of the treadmill condition (F(5, 90) = 64.589, p < 0.001) (Fig. 2a). Specifically, in early adaptation walking, STS was significantly reduced compared to Slow late (t(19) = 9.964, p < 0.001). STS increased during adaptation, as indicated by a significant difference between Adaptation 1 early and Adaptation 2 late (t(19) = −3.82, p < 0.001). However, STS reached a plateau of symmetry lower than baseline symmetry. An aftereffect was observed in the early catch trial, indicated by a significant difference between Catch early and Slow late (t(19) = −4.532, p < 0.001). By the end of the catch trial, STS had returned to baseline levels. During the final exposure to the split-belt in Adaptation 3, symmetry reduced as expected, indicated by a significant difference between Catch late and Adaptation 3 early (t(19) = 11.354, p < 0.001).

Effect of optic flow information on gait symmetry during treadmill locomotion, for the indices of a stance time symmetry (STS) and b swing time symmetry (SWS). The solid blue lines represent the tactile group (TC), and the dashed red lines represent the virtual reality and tactile group (VRT). The gray regions indicate the split-belt adaptation trials. Mean ± SD are shown. Statistical significance is indicated by the asterisks above the corresponding comparisons: ***p < 0.001, **p < 0.01 (colour figure online)
The SWS was also affected by the treadmill condition (F(5, 90) = 74.109, p < 0.001). In early adaptation, SWS was significantly increased compared to Slow late (t(19) = −10.944, p < 0.001). SWS decreased during adaptation, as indicated by a significant difference between Adaptation 1 early and Adaptation 2 late (t(19) = −3.78, p < 0.01). However, SWS reached a plateau of symmetry higher than baseline symmetry. An aftereffect was observed in the early catch trial, indicated by a significant difference between Catch early and Slow late (t(19) = 5.049, p < 0.001). By the end of the catch trial, SWS had returned to baseline levels. During the final exposure to the split-belt in Adaptation 3, symmetry reduced as expected, indicated by a significant difference between Catch late and Adaptation 3 early (t(19) = −11.058, p < 0.001). No further main effects and interaction effects were noted.
Spatial parameters were significantly dependent on treadmill condition and group. The SLS was affected by the treadmill condition (F(5, 85) = 43.363, p < 0.001) (Fig. 3a). SLS was significantly reduced in Adaptation 1 early compared to Slow late (t(19) = −7.067, p < 0.001). No significant change in SLS was observed during split-belt locomotion. Following the adaptation phase, in the early catch trial a laterality shift in symmetry was observed resulting in an aftereffect indicated by a significant difference between Catch early and Slow late (t(19) = −4.006, p < 0.01). A similar shift to the opposite leg was observed in the final adaptation trial (Catch late–Adaptation 3 early: t(18) = −15.255, p < 0.001). A main effect of group (F(1, 17) = 4.884, p < 0.05) was observed, indicating overall higher SLS values in the TC group in comparison with the VRT group. No significant interaction effects were observed. The STLS was affected by the treadmill condition (F(5, 85) = 137.779, p < 0.001). Specifically, STLS symmetry was significantly reduced in Adaptation 1 early compared to Slow late (t(19) = −13.128, p < 0.001) (Fig. 3b). No significant change in STLS was observed during split-belt locomotion, suggesting that a stable split-belt pattern was rapidly attained. No significant aftereffects were observed. A reduction in symmetry was observed in the final exposure to split-belt adaptation (Catch late–Adaptation 3 early: t(18) = −20.092, p < 0.001). There were no group or interaction effects observed for STLS.

Effect of optic flow information on gait symmetry during treadmill locomotion, for the symmetry indices of a stride length (SLS) and b step length (STLS). The solid blue lines represent the tactile group (TC), and the dashed red lines represent the virtual reality and tactile group (VRT). The gray regions indicate the split-belt adaptation trials. Mean ± SD are shown. Statistical significance is indicated by the asterisks above the corresponding comparisons: ***p < 0.001, **p < 0.01 (colour figure online)
Kinetic treadmill adaptation
An adaptation effect was observed in the vGRF symmetry index (F(5, 80) = 133.548, p < 0.001) (Fig. 4a). Specifically, an immediate increase in asymmetry occurred in Adaptation 1 early compared to Slow late (t(17) = 18.055, p < 0.001). Symmetry increased as a function of adaptation, indicated by a significant difference between Adaptation 1 early and Adaptation 2 late (t(17) = −8.637, p < 0.001). The symmetry index showed aftereffects in the early catch trial, indicated by a significant difference between Catch early and Slow late (t(17) = −4.342, p < 0.001). A similar shift in the opposite direction was observed for vGRF symmetry in the final adaptation trial (Catch late–Adaptation 3 early: t(17) = 13.234, p < 0.001). General adaptation effects on the treadmill were also observed in apGRF (F(5, 80) = 19.209, p < 0.001), the symmetry of which did not show any early adaptation effects: Differences between Adaptation 1 early and Slow late were insignificant. As shown in Fig. 4b, symmetry increased as a function of adaptation, indicated by a significant increase from Adaptation 1 early to Adaptation 2 late (t(17) = −7.562, p < 0.001). The apGRF symmetry index did not return to baseline in the early part of the catch trial demonstrating significant aftereffects between Catch early and Slow late (t(17) = −4.851, p < 0.001). No further group or interaction effects were observed in the apGRF symmetry index.

Effect of optic flow information on symmetry of a vertical impulse (vGRF) and b anteroposterior impulse (apGRF) during treadmill locomotion. The solid blue lines represent the tactile group (TC), and the dashed red lines represent the virtual reality and tactile group (VRT). The gray regions indicate the split-belt adaptation trials. Mean ± SD are shown. Statistical significance is indicated by the asterisks above the corresponding comparisons: ***p < 0.001 (colour figure online)
Temporal overground transfer
Overground walking in the pre- and post-treadmill phases was investigated using footswitches, providing temporal information on individual strides and stance and swing phases of the gait cycle based on plantar pressure patterns associated with particular gait events. A significant condition by group interaction effect for STS (F(1, 13) = 6.222, p < 0.05) indicates that the two groups displayed different transfer of stance time symmetry characteristics (Fig. 5a). Specifically, the significant pre- and post-treadmill difference was observed only in the TC group (t(9) = 4.477, p < 0.01). In SWS, a marginal interaction effect was observed (F(1,13) = 4.549, p = 0.053). Since there was a marginal effect and our sample size is small, we did a post hoc test and determined a significant pre- and post-treadmill difference only in the TC group (t(9) = −4.963, p < 0.001) (Fig. 5b).

Effect of tactile stimulation on a stance time symmetry (STS) and b swing time symmetry (SWS) during overground walking in the preadaptation and post-adaptation phases. The solid blue lines represent the tactile group (TC), and the dashed red lines represent the virtual reality and tactile group (VRT). Mean ± SD are shown. Statistical significance for an interaction effect is indicated by the asterisks above the corresponding comparison. A significant interaction effect was observed for STS and marginal significance for SWS. Post hoc comparisons showed differences only in the TC group, indicating reduced adaptation in the TC group. Addition of VR was observed to negate this response to tactile stimulation (colour figure online)
Discussion
The results of the current study indicate both spatial and temporal parameters adapted during split-belt treadmill locomotion in both groups. Marked changes of kinetic gait characteristics were observed in both groups during split-belt adaptation as well. During treadmill adaptation, SLS was significantly lower in the VRT group, suggesting that spatial control of locomotion was affected by optic flow even though tactile feedback was perturbed in both groups. On the treadmill, patterns of adaptation of STS and SWS were similar in the two groups, suggesting that temporal control is not modified by the presence of optic flow information. Whereas the TC group displayed significant stance time and borderline swing time asymmetry during the post-treadmill transfer task, such aftereffects were absent in the VRT group.
The effect of vibration on split-belt adaptation
In unperturbed split-belt locomotor adaptation, i.e., while not exposed to plantar vibration, individuals tend to display significant adaptation on the treadmill, yet exhibit only minimal overground transfer (Mukherjee et al. 2015). However, when they are exposed to plantar vibration during the adaptation task, larger and more persistent transfer effects occur that decay slowly (Mukherjee et al. 2015). Since external dynamic visual cues were absent for both groups, these differences could be attributed to increasing the gain of internal body-based cues such as from proprioception, higher for the plantar vibration group through multisensory integration (Campos et al. 2014; Green and Angelaki 2010). Such movement and perceptual characteristics that are perceived to originate from the body itself are more likely to generalize and therefore result in larger transfer effects. When the movement and perceptual characteristics during split-belt locomotion are perceived to be environment specific, contributions to a transferable locomotor movement pattern are reduced (Berniker and Kording 2008; Torres-Oviedo and Bastian 2012). In the present study, a constant factor in both groups was the presence of plantar tactile vibration. At the peripheral level, tactile vibration reduces the responsiveness of multiple types of mechanoreceptors and subsequently reduces plantar sensitivity during standing (Bove et al. 2003), which has detrimental effects on the ability to maintain interlimb coordination during locomotion (Zehr and Haridas 2003). Here, plantar tactile vibration was applied to reduce the signal-to-noise ratio of peripheral somatosensory inputs, driving the system to reweight multisensory input. Subsequently, in order to perform the task of split-belt adaptation, the CNS needs to rely on alternative intramodal and intermodal sources of sensory information. A reduction in cutaneous tactile acuity can lead to a reduction in the respective sensory gain, subsequently increasing the gain of intramuscular proprioception through an attention-modulated process of intramodal reweighting (Pestilli et al. 2011). Increased attention-driven processing in higher-order sensory areas is reflected in persistent motor aftereffects (Rosenkranz and Rothwell 2012). These motor aftereffects may be maintained, as long as the pre-training combination of sensory weights is not restored. This process may be similar to what is observed in sensory reweighting during standing posture control. Postural strategies adapted for a particular environmental perturbation are maintained afterward, when accurate environmental conditions are reintroduced. This is particularly evident in the reweighting of intramuscular proprioceptive information (Peterka and Loughlin 2004).
The mediating effect of visual information on vibration during split-belt adaptation
As observed in the current study, the presence of optic flow during adaptation has specific effects on locomotor behavior. Although no significant optic flow-induced differences in adaptive behavior occurred while subjects were on the treadmill, in the overground condition the training effects were significantly reduced. Only one other study specifically investigated the effect of different types of optic flow on split-belt adaptation. In this study by Finley et al. (2014), optic flow was either static or dynamically altered to match the treadmill belt during the stance phase of the gait cycle (congruent optic flow) or the swing phase of the gait cycle (incongruent optic flow). They found that adaptation was faster when optic flow was incongruent compared to both no optic flow and congruent optic flow conditions. This suggested that visual information is used to control the swing phase (Finley et al. 2014). In the current study, however, during split-belt adaptation, optic flow was consistently matched to the slow belt (0.5 m/s). This means that visual information essentially contained a mixture of congruent and incongruent flow. Subsequently, the system did not benefit from the facilitating effect of optic flow systematically coupled to the swing phase, as was the case in the Finley study, and no optic flow-driven enhancement of split-belt adaptation was observed. On a related note, previous research on the role of vision during split-belt locomotor adaptation suggested that the presence of vision during adaptation increases the dependence of a learned motor task on the context in which it is learned, i.e., the split-belt treadmill. Subsequently in a significantly different environment, asymmetric gait was not observed (Torres-Oviedo et al. 2011). Indeed, observed adaptation patterns reinforce the hypothesis of vision increasing dependence on the device-based environment present during adaptation (Reisman et al. 2010). The absence of vision during adaptation and overground transfer has been shown to enhance the adaptation process by reducing the sensory differences between the treadmill and overground environments (Torres-Oviedo and Bastian 2010). However, this contextual explanation is contrary to what the current results suggest. As optic flow during adaptation had a similar structure to what was experienced overground, learned split-belt locomotor dynamics should have been expressed during the overground transfer task.
Such contextual effects can also be expressed in terms of sensory reweighting. When task-relevant visual information is not present during locomotor adaptation, the system may have learned to increase lower-limb proprioceptive gain and reduce visual gain during locomotion through a process of intermodal sensory reweighting, similar to what is commonly observed during standing balance under such sensory conditions (Peterka and Loughlin 2004). However, when visual information is present during locomotion in the form of optic flow, visual gain is not reduced and adaptation does not benefit from proprioceptive up-weighting. Indeed, concurrent visual stimulation demands increased visual processing, taking away cognitive resources from proprioceptive systems, reducing the ability to learn the proprioceptive task. This has been observed in standing posture in perturbed environments (Patel et al. 2014) and now could hold for split-belt locomotion as well.
Previous work has shown that optic flow can provide the necessary information that reduces increased muscle activation and spatiotemporal requirements needed for performing dynamically asymmetrical tasks such as gait with a unilateral limb load (Mukherjee et al. 2011). In that study, it was suggested that optic flow information enabled subjects to scale their gait responses to dynamic situations better and therefore, subjects experiencing optic flow did not need to overcompensate during learning which was observed in the control, no-visual-feedback group (Mukherjee et al. 2011). This may also be the reason why the TC group, in this study, had a larger group effect in comparison with the VRT for the SLS index (Fig. 3a). Although tactile perturbation was also present in the VRT group, the optic flow allowed them to scale the biomechanical compensations appropriately for the dynamics of the task. The observed compensations in muscle activity that are important in split-belt adaptation show characteristic temporal modulation (MacLellan et al. 2014). Such modulations are the likely mechanistic candidates for the observed adaptive changes in the symmetry indices of the kinetic variables in this study. The fact that vGRF symmetry shows early adaptive changes toward asymmetry while such asymmetric changes take comparatively longer to develop for the apGRF values, points toward the kinetic modulations that underpin the rapid versus slow adaptive changes observed in locomotor adaptation studies (Richards et al. 2007; Reisman et al. 2005).
A commonly observed result of split-belt paradigms includes healthy individuals who display limited aftereffects, as opposed to less healthy individuals such as Parkinson’s disease patients (Roemmich et al. 2014) and stroke survivors who display more significant aftereffects (Reisman et al. 2009). Healthy individuals show comparatively limited aftereffects not because they do not adapt and learn the task as well as less healthy individuals. Healthy individuals show limited aftereffects because they possess the flexibility to adapt to the overground (non-split-belt) environment as soon as is presented by efficiently and flexibly readjusting sensory gains based on environmental conditions; an ability significantly reduced in PD patients (Scocco et al. 2014), stroke survivors (Oliveira et al. 2011), and individuals exposed to extreme sensory conditions (Speers et al. 1998). In fact, this particular study was performed because certain healthy individuals (i.e., astronauts) returning from long-term exposure to microgravity have a difficulty re-adapting to normal environmental conditions, similar to what is observed in the current study during the transfer to overground walking.
Conclusions
The present findings suggest that training in a more ecologically valid environment, more closely related to the context in which transfer is expected to occur, through the inclusion of optic flow, reduces transfer of adaptation, which is otherwise retained. This may have important implications for training and rehabilitation. Rehabilitation is performed to reduce the suboptimal motor patterns of the current unhealthy system by stimulating the emergence of stable and adaptable movement patterns, representative of healthy motor behavior.
References
Bacarin TA, Sacco IC, Hennig EM (2009) Plantar pressure distribution patterns during gait in diabetic neuropathy patients with a history of foot ulcers. Clinics (Sao Paulo) 64:113–120
Berniker M, Kording K (2008) Estimating the sources of motor errors for adaptation and generalization. Nat Neurosci 11:1454–1461
Bove M, Nardone A, Schieppati M (2003) Effects of leg muscle tendon vibration on group Ia and group II reflex responses to stance perturbation in humans. J Physiol 550:617–630. doi:10.1113/jphysiol.2003.043331
Campos JL, Butler JS, Bülthoff HH (2014) Contributions of visual and proprioceptive information to travelled distance estimation during changing sensory congruencies. Exp Brain Res 232(10):3277–3289
Chien JH, Eikema DJ, Mukherjee M, Stergiou N (2014) Locomotor sensory organization test: a novel paradigm for the assessment of sensory contributions in gait. Ann Biomed Eng 42(12):2512–2523
Eils E, Nolte S, Tewes M, Thorwesten L, Volker K, Rosenbaum D (2002) Modified pressure distribution patterns in walking following reduction of plantar sensation. J Biomech 35:1307–1313
Fajen BR (2013) Guiding locomotion in complex, dynamic environments. Front Behav Neurosci 7:85. doi:10.3389/fnbeh.2013.00085
Finley JM, Statton MA, Bastian AJ (2014) A novel optic flow pattern speeds split-belt locomotor adaptation. J Neurophysiol 111:969–976. doi:10.1152/jn.00513.2013
Green AM, Angelaki DE (2010) Multisensory integration: resolving sensory ambiguities to build novel representations. Curr Opin Neurobiol 20(3):353–360
Hoogkamer W, Bruijn SM, Duysens J (2014) Stride length asymmetry in split-belt locomotion. Gait Posture 39:652–654. doi:10.1016/j.gaitpost.2013.08.030
Katsavelis D, Mukherjee M, Decker L, Stergiou N (2010) The effect of virtual reality on gait variability. Nonlinear Dyn Psychol Life Sci 14:239–256
Kavounoudias A, Roll R, Roll JP (1998) The plantar sole is a ‘dynamometric map’ for human balance control. NeuroReport 9:3247–3252
Kiss RM (2010) Comparison between kinematic and ground reaction force techniques for determining gait events during treadmill walking at different speeds. Med Eng Phys 32(6):662–667
Leung YY, Bensmaïa SJ, Hsiao SS, Johnson KO (2005) Time-course of vibratory adaptation and recovery in cutaneous mechanoreceptive afferents. J Neurophysiol 5:3037–3045. doi:10.1152/jn.00001.2005
MacLellan MJ, Patla AE (2006) Adaptations of walking pattern on a compliant surface to regulate dynamic stability. Exp Brain Res 173:521–530. doi:10.1007/s00221-006-0399-5
Maclellan MJ, Ivanenko YP, Massaad F, Bruijn SM, Duysens J, Lacquaniti F (2014) Muscle activation patterns are bilaterally linked during split-belt treadmill walking in humans. J Neurophysiol 111(8):1541–1552
Mawase F, Haizler T, Bar-Haim S, Karniel A (2013) Kinetic adaptation during locomotion on a split-belt treadmill. J Neurophysiol 109:2216–2227. doi:10.1152/jn.00938.2012
Mickelborough J, van der Linden ML, Richards J, Ennos AR (2000) Validity and reliability of a kinematic protocol for determining foot contact events. Gait Posture 11(1):32–37
Mukherjee M, Siu KC, Katsavelis D, Fayad P, Stergiou N (2011) The influence of visual perception of self-motion on locomotor adaptation to unilateral limb loading. J Mot Behav 43(2):101–111
Mukherjee M, Eikema DJ, Chien JH, Myers SA, Scott-Pandorf M, Bloomberg JJ, Stergiou N (2015) Plantar tactile perturbations enhance transfer of split-belt locomotor adaptation. Exp Brain Res 233(10):3005–3012
Nurse MA, Nigg BM (2001) The effect of changes in foot sensation on plantar pressure and muscle activity. Clin Biomech (Bristol, Avon) 16:719–727
Oliveira CB, Medeiros IR, Greters MG, Frota NA, Lucato LT, Scaff M, Conforto AB (2011) Abnormal sensory integration affects balance control in hemiparetic patients within the first year after stroke. Clinics (Sao Paulo) 66:2043–2048
Patel M, Kaski D, Bronstein AM (2014) Attention modulates adaptive motor learning in the ‘broken escalator’ paradigm. Exp Brain Res 232:2349–2357. doi:10.1007/s00221-014-3931-z
Pestilli F, Carrasco M, Heeger DJ, Gardner JL (2011) Attentional enhancement via selection and pooling of early sensory responses in human visual cortex. Neuron 72:832–846 doi:10.1016/j.neuron.2011.09.025
Peterka RJ, Loughlin PJ (2004) Dynamic regulation of sensorimotor integration in human postural control. J Neurophysiol 91:410–423. doi:10.1152/jn.00516.2003
Prokop T, Schubert M, Berger W (1997) Visual influence on human locomotion. Modulation to changes in optic flow. Exp Brain Res 114:63–70
Reisman DS, Block HJ, Bastian AJ (2005) Interlimb coordination during locomotion: what can be adapted and stored? J Neurophysiol 94:2403–2415. doi:10.1152/jn.00089.2005
Reisman DS, Wityk R, Silver K, Bastian AJ (2009) Split-belt treadmill adaptation transfers to overground walking in persons poststroke. Neurorehabil Neural Repair 23:735–744. doi:10.1177/1545968309332880
Reisman DS, Bastian AJ, Morton SM (2010) Neurophysiologic and rehabilitation insights from the split-belt and other locomotor adaptation paradigms. Phys Ther 90:187–195. doi:10.2522/ptj.20090073
Richards JT, Mulavara AP, Bloomberg JJ (2007) The interplay between strategic and adaptive control mechanisms in plastic recalibration of locomotor function. Exp Brain Res 178(3):326–338
Roemmich RT, Nocera JR, Stegemoller EL, Hassan A, Okun MS, Hass CJ (2014) Locomotor adaptation and locomotor adaptive learning in Parkinson’s disease and normal aging. Clin Neurophysiol 125:313–319. doi:10.1016/j.clinph.2013.07.003
Rosenkranz K, Rothwell JC (2012) Modulation of proprioceptive integration in the motor cortex shapes human motor learning. J Neurosci 32:9000–9006. doi:10.1523/JNEUROSCI.0120-12.2012
Scocco DH, Wagner JN, Racosta J, Chade A, Gershanik OS (2014) Subjective visual vertical in Pisa syndrome. Parkinsonism Relat Disord 20:878–883. doi:10.1016/j.parkreldis.2014.04.030
Speers RA, Paloski WH, Kuo AD (1998) Multivariate changes in coordination of postural control following spaceflight. J Biomech 31:883–889
Torres-Oviedo G, Bastian AJ (2010) Seeing is believing: effects of visual contextual cues on learning and transfer of locomotor adaptation. J Neurosci 30:17015–17022. doi:10.1523/JNEUROSCI.4205-10.2010
Torres-Oviedo G, Bastian AJ (2012) Natural error patterns enable transfer of motor learning to novel contexts. J Neurophysiol 107:346–356. doi:10.1152/jn.00570.2011
Torres-Oviedo G, Vasudevan E, Malone L, Bastian AJ (2011) Locomotor adaptation. Prog Brain Res 191:65–74. doi:10.1016/B978-0-444-53752-2.00013-8
Vasudevan EV, Bastian AJ (2010) Split-belt treadmill adaptation shows different functional networks for fast and slow human walking. J Neurophysiol 103:183–191. doi:10.1152/jn.00501.2009
Warren WH Jr, Kay BA, Zosh WD, Duchon AP, Sahuc S (2001) Optic flow is used to control human walking. Nat Neurosci 4:213–216. doi:10.1038/84054
Zehr EP, Haridas C (2003) Modulation of cutaneous reflexes in arm muscles during walking: further evidence of similar control mechanisms for rhythmic human arm and leg movements. Exp Brain Res 149:260–266. doi:10.1007/s00221-003-1377-9
Zehr EP, Nakajima T, Barss T et al (2014) Cutaneous stimulation of discrete regions of the sole during locomotion produces “sensory steering” of the foot. BMC Sports Sci Med Rehabil 6:33. doi:10.1186/2052-1847-6-33
Zeni JA Jr, Richards JG, Higginson JS (2008) Two simple methods for determining gait events during treadmill and overground walking using kinematic data. Gait Posture 27(4):710–714
Acknowledgments
This study was supported by NASA Experimental Program to Stimulate Competitive Research (EPSCoR) grant number NNX11AM06A and the Center of Biomedical Research Excellence grant (1P20GM109090-01) from NIGMS/NIH. The content is solely the responsibility of the authors and does not necessarily represent the official views of the NASA or the NIH.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Eikema, D.J.A., Chien, J.H., Stergiou, N. et al. Optic flow improves adaptability of spatiotemporal characteristics during split-belt locomotor adaptation with tactile stimulation. Exp Brain Res 234, 511–522 (2016). https://doi.org/10.1007/s00221-015-4484-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-015-4484-5