
Abstract
Movements learned in one set of conditions may not generalize to other conditions. For example, practicing walking on a split-belt treadmill subsequently changes coordination between the legs during normal (“tied-belt”) treadmill walking; however, there is limited generalization of these aftereffects to natural walking over the ground. We hypothesized that generalization of split-belt treadmill adaptation to over-ground walking would be improved by maintaining consistency in other task variables, specifically gait speed. This hypothesis was based on our previous finding that treadmill aftereffect size was sensitive to gait speed: Aftereffects were largest when tested on tied-belts running at the same speed as the slower belt during split-belt adaptation. In the present study, healthy adults were assigned to a “slow” or “fast” over-ground walking group. Both groups adapted to split-belts (0.7:1.4 m/s), and treadmill aftereffects were tested on tied-belts at the slow (0.7 m/s) and fast (1.4 m/s) speeds. All participants were subsequently transferred to the over-ground environment. The slow and fast groups walked over-ground at 0.7 and 1.4 m/s, respectively. As in previous work, we found that the size of aftereffects during treadmill walking was speed-dependent, with larger aftereffects occurring at 0.7 m/s compared with 1.4 m/s. However, over-ground walking aftereffects were less sensitive to changes in gait speed. We also found that aftereffects in spatial coordination generalized more to over-ground walking than aftereffects in temporal coordination across all speeds of walking. This suggests that different factors influence aftereffect size in different walking environments and for different measures of coordination.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
When we learn a new movement, we often want to retrieve it in a situation that is different from where it was learned. Runners, for instance, may refine aspects of their gait on a treadmill and hope that this transfers to running over-ground. In clinical settings, therapists will often retrain walking on a treadmill with the expectation that this will improve real-world walking. This, however, does not always happen: generalization of motor learning can be remarkably sensitive to changes in movement space (McVea and Pearson 2007; Reisman et al. 2009), direction (Krakauer et al. 2000; Hwang et al. 2006; Choi and Bastian 2007; Taylor and Ivry 2013), speed (Kitazawa et al. 1997; McVea and Pearson 2007; Francis 2008; Vasudevan and Bastian 2010), among other changes in motor and sensory context (e.g., Shelhamer and Clendaniel 2002; Reynolds and Bronstein 2004; Blau et al. 2009).
Practicing walking on a split-belt treadmill—a treadmill with two belts that control the speed of each leg independently—changes the coordination between the legs, which is expressed as an aftereffect when the two belts return to the same speed (i.e., “tied-belts”) (Reisman et al. 2005). This is a form of short-term learning called adaptation. Aftereffects following split-belt adaptation are significantly reduced in amplitude if they are tested in a new environment (e.g., over-ground—Reisman et al. 2009), while walking backwards (Choi and Bastian 2007), or while walking at speed that differs from that of the slower belt during split-belt walking (Vasudevan and Bastian 2010). These aftereffects are largely restored by returning to the conditions under which adaptation occurred (Choi and Bastian 2007; Reisman et al. 2009; Vasudevan and Bastian 2010), indicating that the memory of the adapted pattern persists.
Limited generalization across different tasks or contexts may be a form of retrieval failure, or an inability to access material that is otherwise still available in the memory store (Tulving and Pearlstone 1966). This is consistent with evidence that memories can be recovered by re-introducing retrieval cues that were present during training (Tulving and Pearlstone 1966; Gordon 1981; Deweer 1986). In the split-belt adaptation paradigm, visual and vestibular inputs are different between training (treadmill) and transfer (over-ground) conditions, and these mismatches likely limit generalization. Reducing sensory differences between these two environments by eliminating vision (i.e., blindfolding) significantly improves generalization to over-ground walking in neurologically intact adults (Torres-Oviedo and Bastian 2010), but this approach has limited real-world applications. Nonetheless, this suggests that increasing the perceived similarity of training and transfer conditions, either by reducing the conflicting sensory input (i.e., vision) or by enhancing the shared information, could enhance transfer of split-belt adaptation to untrained environments.
From our previous work, we know that one relevant context cue in split-belt adaptation is gait speed. We found that treadmill aftereffects are largest when tested on tied-belts that were matched to the speed of the slower belt during adaptation (Vasudevan and Bastian 2010). For example, when split-belt adaptation occurred at speeds of 0.7:1.4 m/s, the largest aftereffects were observed at a tied-belt treadmill speed of 0.7 m/s; when split-belt speeds were 1.4:2.1 m/s, the largest aftereffects occurred at 1.4 m/s (Vasudevan and Bastian 2010). Differences as small as 0.2 m/s were sufficient to observe a significant decrease in the size of aftereffects (Vasudevan and Bastian 2010). This finding could have important implications for rehabilitation. Long-term training on the split-belt treadmill can produce long-term improvements in over-ground walking coordination in many, but not all, adults with hemiparesis due to stroke (Reisman et al. 2013). It is possible that differences between training and testing environments, such as gait speed, may have contributed to observed changes in over-ground walking coordination.
In our previous study, we suggested that the speed dependence of split-belt treadmill aftereffects would be carried forward to over-ground walking (Vasudevan and Bastian 2010). If split-belt treadmill adaptation is to be used as a therapeutic tool to improve gait coordination following stroke (Reisman et al. 2013), this would imply that the speed of split-belt walking is an important training variable to control. However, the speed dependence of over-ground walking aftereffects has never been tested. The purpose of this study was to test whether the speed dependence of split-belt treadmill aftereffects endures when the walking environment changes. We hypothesized that over-ground aftereffects would be largest when the over-ground walking speed was matched to that of the slow belt during split-belt adaptation in adults without neurological injury or illness. If so, this would indicate that gait speed is a relatively simple cue that should be controlled in order to maximize generalization of locomotor learning to new environments.
Materials and methods
Participants
Twenty adults without a history of neurological or orthopedic conditions participated in this study [15 female; age: 22.5 ± 3.0 (SD) years]. Ethical approval was obtained through the institutional review board at Einstein Medical Center, and all participants gave informed consent. All experiments were performed in accordance with the ethical standards laid down in the 1964 Declaration of Helsinki.
Experimental setup and design
Participants walked over the ground (on a 7-m walkway) and on a custom-built split-belt treadmill (Woodway, Waukesha, WI). The split-belt treadmill has two separate belts driven by independent motors. These belts could be driven at the same speed (“tied-belt”) or at different speeds (“split-belt”). Speed commands for each belt were sent to the treadmill via a custom MATLAB computer interface (MathWorks, Natick, MA). Participants were centered on the treadmill with one foot on each belt. They held a front rail that was adjusted to elbow height and wore a safety harness around their chest. The safety harness was suspended from the ceiling but did not support body weight during walking. At the beginning of each trial, the belts were stationary, and participants were not told what speeds the belts would be going. Once the belts started moving, participants were instructed to look straight ahead.
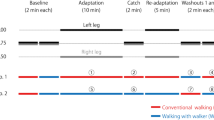
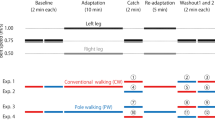
Prior to beginning the experiment, participants walked on the treadmill for 2 min at each target speed (0.7 and 1.4 m/s). During these introductory walking sets, participants were told what speed the belts were moving; participants were not informed of belt speed during subsequent trials. The purpose of these 2 min trials was to expose participants to the desired speeds, which was thought to help them reproduce these speeds during over-ground walking in later testing. These initial trials were not recorded. Following this, participants performed the tasks outlined in the experimental paradigm (Fig. 1). To evaluate pre-adaptation walking coordination, each experiment began with baseline testing of over-ground (OG) and treadmill (TM) walking at a slow (S, 0.7 m/s) and fast (F, 1.4 m/s) speed. These speeds were selected to correspond with those used in a previous study (Vasudevan and Bastian 2010). For reference, preferred walking speed for adults is around 1.1–1.2 m/s (Saibene and Minetti 2003; Dingwell and Marin 2006). Altogether, there were four baseline conditions: over-ground slow (OGS), over-ground fast (OGF), treadmill slow (TMS), and treadmill fast (TMF). Treadmill coordination was evaluated over 2 min of tied-belt walking. Over-ground coordination was assessed over 10 trials of walking on a 7-m walkway. Each OG trial consisted of a participant walking from the start to end of the 7-m walkway. In between trials, participants turned around in place and prepared for the next trial. During OG trials, participants were timed and, if needed, given verbal feedback after each trial regarding how they should adjust their walking speed to achieve the target speeds.

a Experimental paradigm. Filled blocks indicate treadmill (TM) walking, while open blocks indicate over-ground (OG) walking. Breaks between treadmill blocks indicate that the treadmill was briefly stopped and restarted to reconfigure belt speeds. Slow trials, denoted by subscript “S”, were at 0.7 m/s; fast trials (F) were at 1.4 m/s. The speeds of the slow and fast belts during split-belt trials (SB) were 0.7 and 1.4 m/s, respectively. Ten-second tied-belt catch trials at slow (CS) and fast (CF) speeds were randomly ordered near the end of adaptation. All participants experienced an identical paradigm until reaching the post-adaptation phase of the experiment, at which point they were randomly assigned to a slow or fast over-ground walking group. b Single participant stride-by-stride plots of changes in gait symmetry. Step length difference (top) is a measure of spatial gait symmetry, and double support difference (bottom) is a measure of temporal symmetry. For reference, perfect symmetry is shown by the horizontal axis at 0. Color coding corresponds to that in (a) (color figure online)
After the baseline evaluations, participants adapted to split-belts (TMSB) for 17 min, with one belt at the slow speed (0.7 m/s) and one at the fast speed (1.4 m/s). The participant’s self-identified dominant leg stepped on the fast belt. To briefly assess the size of treadmill aftereffects, two 10-s tied-belt “catch” trials were placed 10 and 12 min into adaptation at either the slow or fast speed. The treadmill was stopped in between split-belt and tied-belt treadmill trials to reconfigure belt speeds. The order of the fast catch (CF) and slow catch (CS) trials was counterbalanced to negate any effect of catch trial order. Participants were re-adapted to split-belts for 5 min after the last catch trial before we assessed the transfer to over-ground walking.
Following adaptation, participants were randomly assigned to a slow (n = 10) or fast (n = 10) group, indicating the speed at which they would complete 10 over-ground post-adaptation (OG PA) trials. All participants were transported between the treadmill and walkway in a wheelchair to ensure that no steps were taken between the end of adaptation and the beginning of OG PA. OG PA trials were timed to evaluate gait speed, and participants were given verbal feedback about their gait speed at the end of each trial.
Data collection
Kinematic data were collected at 100 Hz using the Codamotion CX1 system (Charnwood Dynamics, Ltd., Leicestershire, UK). Infrared-emitting LED markers were placed bilaterally over the fifth metatarsal head (toe), lateral malleolus (ankle), lateral femoral epicondyle (knee), greater trochanter (hip), iliac crest (pelvis), and acromion process (shoulder) (Fig. 2a). The coordinate system was aligned such that the x-axis was parallel to the treadmill belts and the direction of walking over-ground, the y-axis was horizontally perpendicular, and the z-axis was orthogonal to the x–y plane. Voltages indicating treadmill belt speeds were recorded directly from treadmill motor output and interfaced with the Codamotion system. Marker positions and treadmill speed were synchronized and sampled simultaneously using Codamotion software at 100 and 1000 Hz, respectively.

a Experimental setup. Reflective markers were placed at the locations shown. Limb angle (θ) was calculated as the angle formed between a vector drawn from the hip to ankle and a vertical line from the hip. b Experimental measures. Single-subject plot showing limb angle (top trace) and force-sensitive resistor (FSR) signals during the first few strides on the split-belt treadmill. FSRs are “on” when the foot is in contact with the ground (stance) and “off” when the foot is lifted (swing). Vertical lines show heel contact for the fast leg (red) and slow leg (blue), as defined by FSR signals; this closely aligns with maximum limb angle flexion. Fast step length (SLF) and slow step length (SFS) were calculated at heel strike of the fast and slow leg, respectively, as shown by stick figures above the plot. Double support duration was calculated as the period when both legs maintained ground contact at the end of each support phase, as shown by vertical, gray shaded regions (slow double support phase: DSS; fast double support phase: DSF) (color figure online)
Limb angle was calculated as the angle between the vector connecting the ankle and hip marker and a vector projected downward from the hip (Fig. 2a). Positive limb angles indicate that the limb was in a flexed position (ankle placed ahead of the hip marker); negative limb angles occurred when the limb was extended. Figure 2b shows limb angle across several strides during split-belt walking, when the participant was first exposed to split-belts. Limb angle was used to identify the point of heel-strike (maximum flexion) and toe-off (maximum extension) times, as in other split-belt adaptation studies (e.g., Malone et al. 2011; Vasudevan et al. 2011; Malone and Bastian 2014). A comparison between identifying gait events using limb angle versus using signals from force-sensitive resistors (FSRs) placed beneath the sole of the shoe is shown in Fig. 2b. FSRs return a voltage signal when they are pressed. Vertical dashed lines indicate when heel strike was identified based on the onset of FSR signals; Fig. 2b shows that these align closely with maximum limb angle, justifying the use of peak limb flexion as a proxy indicator of heel-strike timing.
Data analysis
By convention, the leg that was adapted on the slow belt is referred to as the “slow leg,” and the leg on the fast belt is called the “fast leg,” even during tied-belt TM or OG trials. In this experiment, we focused on two measures of interlimb coordination: step length difference (SLD) and double support difference (DSD) (Reisman et al. 2005, 2007, 2009). Step length is a spatial measure of coordination that refers to the anterior–posterior distance between the ankle markers of each leg at heel strike. Slow step length (\({\text{SL}}_{\text{S}}\)) was calculated at slow leg heel strike, and fast step length (\({\text{SL}}_{\text{F}}\)) was calculated at fast leg heel strike (as shown by stick figures in Fig. 2b). Step length difference was the difference between fast step length and slow step length: \({\text{SLD}} = {\text{SL}}_{\text{F}} - {\text{SL}}_{\text{S}}\). A value of zero indicated that two consecutive steps were of equal length and the participant demonstrated symmetric spatial interlimb coordination. If step length difference did not equal zero, walking was asymmetric.
Temporal interlimb coordination was measured as the difference in double support duration between the two sides. There are two periods of double support per stride cycle. Slow double support occurs just before the slow leg toe-off (i.e., from fast leg heel strike to slow leg toe off); fast double support occurs just before fast leg toe-off (i.e., from slow leg heel strike to fast leg toe-off) (as shown by shaded gray boxes in Fig. 2b). The duration of each double support period was expressed as a percentage of the total stride time. The difference between fast and slow double support is the double support difference (\({\text{DSD}} = {\text{DS}}_{\text{f}} - {\text{DS}}_{\text{s}}\)). Similar to step length difference, a double support difference value of zero indicated symmetry in temporal interlimb coordination, whereas any value deviating from zero indicated asymmetry.
Note that we used un-normalized values for step length and double support difference. This was done in an effort to be conservative: we wanted to be sure that any observed differences in aftereffect size across the experiment were not simply due to changes in the values used to normalize. For instance, step length difference is often normalized by dividing by the sum of step lengths, yielding a measure called step length symmetry (e.g., Torres-Oviedo and Bastian 2010, 2012; Malone et al. 2011, 2012; Vasudevan et al. 2011, 2014 ). However, changes in step length symmetry could be either due to changes in the numerator (step length difference) or due to changes in the denominator (step length sum). Changes in step length sum would be expected to occur with changes in walking speed. Therefore, to ensure that the aftereffect size at different speeds was not influenced by speed-related changes in the normalization value (step length sum, in this example), we decided not to normalize the difference values.
To maintain consistency, the first analyzed stride of treadmill walking always began at slow leg heel strike after the slow belt reached 80 % of its target speed. For over-ground walking, the participant was positioned “off-camera” at the beginning of each trial such that the first stride would bring the foot into view of the Codamotion system cameras. The first complete stride cycle (e.g., one right and one left step) was excluded from analysis to ensure that only steady-state walking was analyzed. The participant was instructed to continue walking and stop at the end of the path. The last stride cycle was similarly excluded from analysis. The number of stride cycles included in analysis for each trial ranged between two and four, depending on the speed of walking and participant leg length. Over-ground stride speed was calculated as the distance traveled by the hip marker in the x-coordinate direction (i.e., the direction of walking) divided by the duration of each analyzed stride.
Within participants, mean values during baseline trials were subtracted from all subsequent data to remove any minor offsets in baseline gait symmetry. For example, mean interlimb coordination values during baseline TMS were subtracted from TMSB and CS; baseline TMF mean symmetry was subtracted from CF; baseline OGS or OGF mean symmetry was subtracted from OG PA for the slow and fast groups, respectively. Aftereffect size in CS, CF, and OG PA trials was quantified as the mean symmetry values of the first three strides. To quantify the degree to which treadmill adaptation transferred to the over-ground context, we calculated a percent transfer (PT) for each participant: \({\text{PT}} = \frac{{{\text{AE}}_{\text{OGPA}} }}{{{\text{AE}}_{{{\text{C}}_{\text{S}} }} }} \times 100\), where AE is aftereffect size calculated during the experimental period indicated by subscript. Since the denominator was always \({\text{AE}}_{{{\text{C}}_{\text{S}} }}\), regardless of the speed of OG PA trials, the PT ratio provided an indication of after effect size relative to the largest aftereffects possible (i.e., on slow tied-belts; Vasudevan and Bastian 2010) for each participant. PT allowed for a direct comparison between the two metrics for gait symmetry.
Statistical analysis
Mixed-model ANOVAs were used to compare aftereffect size across experimental phases (CS, CF, and OG PA; within-subject effect) and compare between speed groups (slow and fast groups; between-subject effect). Post hoc analysis of the significant main effect of experimental phase was conducted using a Bonferroni adjustment for multiple comparisons. We also evaluated whether step length and double support duration for each leg were significantly different from baseline values for CS, CF, and OG PA, which would indicate a significant aftereffect. The value for each measure was compared to its respective baseline value using paired t tests. Alpha levels were corrected for multiple comparisons using a variant of the Bonferroni test called Holm’s sequential Bonferroni (Holm 1979), as used in Vasudevan et al. (2014). The Holm’s sequential Bonferroni is considered a compromise between very conservative post hoc tests (e.g., Bonferroni test) and less conservative tests (e.g., Tukey’s test or planned comparisons) and scales the significance values based on the number of comparisons being made. Percent transfer was compared across slow and fast groups (between-subject effect) and interlimb coordination measures (SLD and DSD; within-subject effect) using a mixed-model ANOVA. Stepwise regression analyses evaluated the relationship between stride-by-stride OG PA aftereffect size (dependent variable) and both OG stride speed and OG stride number (independent variables). To further evaluate the potential effects of stride number on stride-by-stride OG PA aftereffect size, we used a mixed-model ANOVA comparing each interlimb coordination measure across strides 1–3 of OG PA (within-subject effect) and between slow and fast groups. For all ANOVAs, Levene’s test for homogeneity of variance confirmed the assumption of equal variance. Statistical significance was defined at p = 0.05, except when corrected for multiple comparisons. All statistical analyses were performed using IBM SPSS Statistics 22 (Armonk, NY, USA).
Results
In this study, participants were instructed to walk over-ground at different speeds, specifically at 0.7 and 1.4 m/s. We were first interested in how well they were able to replicate these speeds. We found that the average speed (±standard error) of baseline OGS was 0.76 ± 0.02 m/s and that of baseline OGF was 1.35 ± 0.02 m/s. In the OG PA trials, participants in the slow group walked at an average speed of 0.75 ± 0.01 m/s; those in the fast group walked at an average speed of 1.43 ± 0.03 m/s.
Aftereffect sizes measured during treadmill catch trials (CS and CF) and OG PA for each speed group are shown in Fig. 3. Note that both groups performed CS at 0.7 m/s and CF at 1.4 m/s. During OG PA, the slow group was instructed to walk at 0.7 m/s and the fast group was instructed to walk at 1.4 m/s. For step length difference (Fig. 3a), the mixed-model ANOVA revealed a significant main effect of experimental phase (F (2,36) = 62.14, p < 0.001), but not for participant group (F (1,18) = 0.04; p = 0.85), and there was no phase × group interaction (F (2,36) = 0.50, p = 0.61). Post hoc analysis of the significant main effect of experimental phase showed that aftereffects were larger during CS compared with CF (p = 0.015). Aftereffects on the treadmill, regardless of speed, were larger than aftereffects during OG PA (p < 0.001). Similar results were obtained from analysis of double support difference aftereffects (Fig. 3b). There was a significant main effect of experimental phase (F (2, 36) = 124.04, p < 0.001), but no main effect of participant group (F (1, 18) = 0.16, p = 0.69) and no group × phase interaction (F (2,36) = 1.08, p = 0.35). Post hoc analysis of experimental phase differences showed that aftereffects were larger in CS compared with CF (p = 0.03) and both treadmill aftereffects were significantly larger than OG PA (p ≤ 0.001).

Aftereffects in step length difference (a) and double support difference (b) following split-belt adaptation in the slow (black) and fast (gray) groups. Bars show the mean size of aftereffects across participants, ±standard error. Aftereffects were compared across the following experimental periods: slow treadmill catch trial (CS, 0.7 m/s), fast treadmill catch trial (CF, 1.4 m/s), and over-ground post-adaptation (OG PA, ~0.7 m/s for slow group and ~1.4 m/s for fast group). Asterisks and brackets indicate significant differences identified via post hoc analysis of the main effect of experimental period (collapsed across groups)
Our previous work has shown that aftereffects tested at the slow-belt speed involved changes in step length on both sides, whereas aftereffects tested at the fast-belt speed were dominated by changes in slow step length only (Vasudevan and Bastian 2010). Figure 4a replicates this finding for treadmill catch trials. Both the slow and fast step lengths (SLS and SLF) are significantly different from baseline in the slow catch trial (CS) in both experimental groups (p ≤ 0.001). In the fast catch trial (CF), only the slow step length (SLS) was significantly different from baseline (p ≤ 0.001). The step length changes in over-ground post-adaptation (OG PA) mirrored this effect—the slow group showed significant (p = 0.01) or near-significant (p = 0.015; criterion p = 0.012) differences in slow and fast step lengths, respectively, while the fast group showed significant changes in slow step length only (p = 0.001). In contrast, double support difference aftereffects were due to significant changes in both the slow and fast double support durations in CS, CF, and OG PA in both groups (p ≤ 0.02).

Aftereffects in fast and slow step length (SLF and SLS) (a) and in fast and slow double support duration (DSF and DSS) (b). Values are plotted as mean changes from baseline values ± standard error (slow group: black; fast group: gray). The experimental periods are the same as in Fig. 3. Asterisks show significant differences from baseline values, indicating that there are significant aftereffects in these measures
Percent transfer, a measure of the size of over-ground aftereffects relative to the maximum size of treadmill aftereffects (i.e., during CS), is shown in Fig. 5 for step length and double support difference. A value of 100 % would indicate that aftereffects in OG PA are the same size as those during CS; values less than 100 % indicate that OG PA aftereffects were smaller than those during CS which, in turn, signifies incomplete generalization of treadmill aftereffects to over-ground walking. Figure 3 already demonstrates that OG PA aftereffects were significantly smaller than treadmill aftereffects, and Fig. 5 confirms this by showing that the percent transfer is below 100 % for both measures of interlimb coordination. The comparison of percent transfer between speed groups and across interlimb coordination measures reveals a significant main effect of measure (step length vs. double support difference; F (1,18) = 21.85, p < 0.001), but no main effect of participant group (F (1,18) = 1.03, p = 0.32) and no measure x group interaction (F (1,18) = 0.20, p = 0.66). In summary, this analysis showed that there was greater generalization of double support difference aftereffects to over-ground walking, compared with step length difference aftereffects, but the amount of transfer was not affected by over-ground walking speed for either measure.

Comparison of the percent transfer of aftereffects from the treadmill to over-ground walking between the slow and fast groups. Over-ground aftereffect size is shown as a percentage of maximum treadmill aftereffect size, as measured during CS. Bars show mean ± standard error. The asterisk shows a significant main effect of measure: double support aftereffects showed greater transfer to over-ground walking, compared with step length aftereffects (p < 0.05). There was no significant effect of OG walking speed group
Thus far, the analysis has indicated that there is a significant effect of walking speed on the size of treadmill aftereffects, but not on the size of over-ground aftereffects. Recall that the size of over-ground aftereffects was calculated as the mean step length difference or double support difference during the first three stride cycles of OG PA. There are two potentially confounding factors that may be influencing our results. First, participants may not be accurately replicating the desired over-ground walking speed in the first OG PA strides used to calculate aftereffects. Second, each OG PA trial consisted of between two and four stride cycles, and thus the three stride cycles used for the calculation of over-ground aftereffects may have been recorded during Trial 1 of OG PA only or during Trials 1 and 2 of OG PA. This second point is a concern since a few unanalyzed strides occurred between over-ground trials as each participant stopped walking, turned around in place, and started again in the other direction. Therefore, if stride three occurred during OG PA Trial 2, there were several unanalyzed strides that would have occurred between stride two and three that could have diminished the size of reported aftereffects. In our data set, stride three was obtained during OG PA Trial 2 in 2/10 participants in the slow group and 5/10 participants in the fast group; all remaining participants had all three strides in Trial 1. Subsequent analyses address these two potential confounds.
We first examined the relationship between stride number, stride speed, and aftereffect size for individual participants during the first three stride cycles of OG PA (Fig. 6). Data from participants in the slow group are shown in filled circles; data from participants in the fast group are shown in open circles. The target speeds for slow and fast over-ground walking are indicated by vertical lines marking 0.7 and 1.4 m/s. A forward stepwise regression analysis evaluated the relationship between step length difference (dependent variable) and stride speed and number (independent variables) (Fig. 6a). In this analysis, neither stride speed nor stride number was entered into the model, indicating that neither variable was predictive of step length difference in the first three strides of OG PA. When double support difference was the dependent variable, stride speed was entered into the stepwise regression model (R = 0.28, p = 0.03; Fig. 6b), but stride number was not. A best-fit line for double support aftereffect size and stride speed is shown in Fig. 6b. This analysis indicates that when precise over-ground walking speed is taken into account, there is a weak correlation between gait speed and aftereffect size for double support difference, but not step length difference.

Over-ground aftereffect size in relation to stride speed and stride number. Step length and double support difference in the first three strides of OG PA walking are shown in (a) and (b), respectively. Data from fast group participants are shown in open circles; data from slow group participants are shown in closed circles. Data from strides 1–3 are indicted by progressively lighter colored circles (see figure legend). The target speeds of 0.7 and 1.4 m/s are indicated by vertical lines. Stride speed was a significant predictor of double support difference, and a best-fit line showing this relationship was added to the data in (b) (color figure online)
The relationship between double support difference and stride speed may also be affected by the trial number from which the first three OG PA strides were obtained. Since more participants required two trials to complete three stride cycles in the fast group compared with the slow group, it is possible that the additional (unanalyzed) strides taken between Trials 1 and 2 in the fast group contributed to the reduction in double support difference aftereffects with faster walking speeds. However, we found no significant main effects or interactions in a mixed-model ANOVA comparing double support difference aftereffects across the first three strides of OG PA and across speed groups (p ≥ 0.43). In other words, even though the fast group performed a greater number of strides in order to obtain three analyzable OG PA strides, there was no significant reduction in double support difference within the first three OG PA strides in either the fast or slow groups.
Discussion
In this study, we discovered that gait speed significantly affects the size of locomotor aftereffects in the training environment (i.e., treadmill), but the effects of speed were muted when aftereffects were assessed in a different environment (i.e., over-ground). Mean spatial coordination (SLD) aftereffects during over-ground walking were <40 % of the size of maximum treadmill aftereffects, and they were not affected by changing gait speed. Temporal coordination (DSD) aftereffects showed greater generalization to over-ground walking (>50 %). Although group analyses revealed no significant effects of gait speed on over-ground temporal aftereffect size, there was a weak but significant correlation between the precise speed of individual strides and over-ground temporal aftereffects. Overall, this suggests that different factors influence aftereffect size in different walking environments.
Treadmill aftereffects are more sensitive to speed cues than over-ground aftereffects
This study replicated the results of a prior study showing that spatial aftereffects tested on the treadmill following split-belt adaptation were largest when they were tested at a speed matched to that of the slow belt during adaptation (Vasudevan and Bastian 2010). In other words, when participants adapted to split-belts running at 0.7:1.4 m/s, aftereffects were larger when they were tested at 0.7 m/s, compared with 1.4 m/s. When participants adapted to split-belts at 1.4:2.1 m/s, aftereffects were larger at 1.4 m/s than they were at 0.7 m/s (Vasudevan and Bastian 2010). The current study also demonstrated that temporal treadmill aftereffects were similarly sensitive to gait speed, which was not reported in the prior paper.
Why were the largest treadmill aftereffects observed when the speed of tied-belts was matched to that of the slow belt during adaptation? We previously suggested that sensory cues from the slow leg may be more salient during adaptation, since the slow leg spends more time in stance than the fast leg during split-belt walking (Reisman et al. 2005; Vasudevan and Bastian 2010). The nervous system may resolve the discrepancy in belt speeds on the two sides by attributing more importance to the treadmill belt that is encountered longer (i.e., the slow side). If so, this would explain the limited generalization of split-belt aftereffects to speeds that are different from the slow-belt speed (Vasudevan and Bastian 2010).
Speed specificity of locomotor adaptation has also been documented in cats that adapted to a consistent tripping perturbation during treadmill walking. The cats adapted by increasing swing-phase toe height to step over the obstacle. When the obstacle was removed, cats continued to high-step for a time (i.e., they showed aftereffects). Interestingly, toe clearance was highest when the cats were walking at a treadmill speed matched to that at which they experienced the perturbations (McVea and Pearson 2007). Tripping aftereffects in cats were also sensitive to changes in the walking environment. Aftereffects were absent when cats walked in a different environment (either an over-ground walkway or a walkway with spaced pegs to step on), and they re-emerged when the cats were returned to the treadmill (McVea and Pearson 2007). The speed of the over-ground walkway trials was not reported, so it was not clear whether walking speed contributed to the diminution of over-ground aftereffects.
In humans, it is well known that split-belt treadmill aftereffects show incomplete generalization from the treadmill to over-ground walking (Reisman et al. 2009; Torres-Oviedo and Bastian 2010, 2012; Vasudevan et al. 2010). In our previous study demonstrating the speed dependence of treadmill aftereffects, we proposed that a simple way to increase the size of over-ground aftereffects may be to ensure that the slow-belt speed during adaptation is matched to over-ground walking speed (Vasudevan and Bastian 2010). However, the results of the current study provide limited support for this recommendation, particularly in reference to spatial over-ground aftereffects which were unaffected by gait speed. There was a weak correlation between stride speed and temporal over-ground aftereffects, but a visual inspection of the data in Fig. 6b suggests that a consistent decrease in aftereffect size did not occur until the over-ground stride speed was more than 0.7 m/s faster than the slow-belt speed during adaptation (compare DSD aftereffects at stride speeds >1.4 m/s to those at stride speeds <1.4 m/s in Fig. 6b). In other words, the speed of over-ground strides had to be twice as fast as the slow-belt speed before temporal over-ground aftereffects noticeably diminished in size. Over-ground aftereffects were much less sensitive to changes in gait speed than treadmill aftereffects, which were significantly reduced with speed changes as small as 0.2 m/s (Vasudevan and Bastian 2010). Overall, this suggests that beneficial effects of precisely matching the slow-belt speed during split-belt walking and the speed of over-ground walking were limited in scope.
Different walking environments did not change the composition of the aftereffects; aftereffects were simply reduced in size during over-ground walking compared with treadmill walking. For example, aftereffects in double support difference were due to changes in both slow and fast double support duration across all speeds of walking and across walking environments (i.e., treadmill and over-ground; Fig. 4b). Slow walking aftereffects in step length difference were comprised of changes in both the slow and fast step lengths, regardless of whether people were stepping on the treadmill or over-ground (Fig. 4a; also compare to Vasudevan and Bastian 2010). Interestingly, fast walking aftereffects in step length difference were dominated by changes in the slow step length only, during both treadmill and over-ground walking (Fig. 4a; compare to Vasudevan and Bastian 2010). It is possible that fast walking aftereffects are limited due to a ceiling effect in fast step length: As step length increases with faster walking, eventually one would reach the maximum step length possible. However, it is unlikely that we reached that ceiling with the speeds tested in the present study. Grillner et al. (1979) showed that foot excursion increases linearly up to a walking speed of 2.2 m/s, well above the maximum speed tested in the present study (1.4 m/s). This suggests that the step length difference aftereffects observed at fast treadmill speeds are probably not limited by maximum step length.
Differences in generalization of temporal and spatial coordination aftereffects
We found that temporal aftereffects generalized well across different environments, whereas spatial aftereffects were more environment-specific (Fig. 5). This is consistent with a growing body of work demonstrating dissociable control of temporal and spatial elements of coordination (Boyd and Winstein 2004; Choi et al. 2009; Malone and Bastian 2010, 2014; Torres-Oviedo and Bastian 2010, 2012; Malone et al. 2011, 2012; Vasudevan et al. 2011; Hoogkamer et al. 2015). This work has shown that spatial coordination takes longer to adapt than temporal coordination (Malone and Bastian 2010; Malone et al. 2012). The ability to adapt temporal parameters is evident earlier in human development than the ability to adapt spatial parameters (Musselman et al. 2011; Vasudevan et al. 2011). Additionally, temporal coordination appears to be more tightly controlled than spatial coordination during a split-belt adaptation task (Malone et al. 2012; Hoogkamer et al. 2015) and is relatively invariant to interventions that manipulate attention during adaptation (Malone and Bastian 2010) or alter training structure (Malone et al. 2011). Taken together, this suggests that the control of temporal coordination is less volitional and likely occurs at lower areas of the nervous system (Arshavsky et al. 1978a, b, c, d; Russell and Zajac 1979), whereas the control of spatial coordination may be more dependent on higher cortical control (Malone and Bastian 2010; Malone et al. 2011).
One hypothesis for why learning is context-specific is that features noticed during learning are stored alongside the trained behavior (Gordon 1981; Gordon et al. 1981). Retrieval of the memory depends, in part, on the maintenance of some proportion of the stimuli that were encoded with the training. Temporal aftereffects generalized better between walking environments than spatial aftereffects, indicating that temporal aftereffects were less sensitive to sensory differences (e.g., visual, vestibular) between treadmill and over-ground walking. The ability to detect and integrate information from visual, vestibular, and other sensory systems, and to use this information to update an internal model of walking, reflects a high degree of processing and integration, likely requiring cortical involvement. Since evidence suggests that spatial coordination is more cortically controlled than temporal coordination, this could explain why generalization of spatial aftereffects was more affected by differences in the walking environment.
We also found a small effect of over-ground walking speed on the generalization of temporal aftereffects, but not spatial aftereffects. It is possible that this could similarly be explained by differences in the control of spatial and temporal coordination. For instance, studies using animal models have demonstrated that the speed of locomotion can be controlled within subcortical neuronal networks within the spinal cord, midbrain, and cerebellum (Orlovskii et al. 1966; Shik et al. 1966; Forssberg et al. 1980; Mori et al. 1999; McLean and Fetcho 2009). As mentioned above, these subcortical structures have also been implicated in the control of temporal coordination. It is possible that speed-related cues may aid or hinder the retrieval of temporal aftereffects since both may be processed and/or controlled at lower areas; however, this is highly speculative. It is also possible that a ceiling effect may be limiting the degree of temporal symmetry that is possible at speeds exceeding 1.4 m/s. In any case, the observed effect of speed on temporal over-ground aftereffects was small.
Limitations
Methodological limitations associated with recording over-ground walking prohibited the analysis of over-ground aftereffect decay rate. Although a number of strides were recorded during over-ground walking, there were also a number of unrecorded strides in between each trial on the 7-m walkway. For instance, the first and last stride cycle during each pass on the over-ground walkway was not analyzed. In addition, the strides taken while the participant was turning around and preparing for the next trial were not analyzed. Since there were a number of unanalyzed strides that occurred between each recorded over-ground walking trial, it was not possible to calculate a decay constant.
Another limitation is that there was a difference between arm position during the treadmill and over-ground trials. During the treadmill trials, participants held a front handrail; during over-ground trials, participants had their arms crossed in front of them. We did this in order to make sure that the infrared markers placed over the hips and pelvis were visible to the sensors placed on either side of the treadmill and walkway. It is possible that maintaining similarity in arm position would improve transfer across walking environments. However, since the arms were always crossed during over-ground walking in both groups, we do not believe that arm position systematically affected aftereffect size in one group more than the other. The potential influence of arm swing on generalization of treadmill aftereffects walking is an interesting question for future investigation.
Conclusions
The current results suggest that split-belt adaptation speed is not a primary determinant of over-ground aftereffect size in healthy young adults. It is likely that the diminution of split-belt aftereffects during over-ground reported in this and other studies (Reisman et al. 2009; Torres-Oviedo and Bastian 2010, 2012) is not due to a mismatch of training and testing speeds; rather, other sensory mismatches, such as visual differences between the training and testing environments, likely play a much larger role in limiting generalization (Torres-Oviedo and Bastian 2010). In the present study, we also report that temporal aftereffects generalize to over-ground walking more than spatial aftereffects, regardless of walking speed. This finding adds evidence to the growing body of research showing that spatial and temporal aspects of walking coordination are controlled separately: temporal coordination is controlled by lower areas of the nervous system, whereas spatial coordination is controlled by higher areas in which integration of sensory input can influence the retrieval of adapted spatial interlimb coordination patterns in different environments. Overall, this suggests that different factors influence retrieval of aftereffects in different walking environments and for different walking coordination measures.
Abbreviations
- AE:
-
Aftereffect
- CF, CS :
-
Catch trial (fast, slow)
- DSF, DSS, DSD:
-
Double support (fast, slow, double support difference)
- OGF, OGS, OG PA:
-
Over-ground walking (fast, slow, post-adaptation)
- PT:
-
Percent transfer
- SLF, SLS, SLD:
-
Step length (fast, slow, step length difference)
- TMF, TMS, TMSB :
-
Treadmill walking (fast, slow, split belt)
References
Arshavsky YI, Gelfand IM, Orlovsky GN, Pavlova GA (1978a) Messages conveyed by descending tracts during scratching in the cat. I. Activity of vestibulospinal neurons. Brain Res 159:99–110
Arshavsky YI, Gelfand IM, Orlovsky GN, Pavlova GA (1978b) Messages conveyed by spinocerebellar pathways during scratching in the cat. I. Activity of neurons of the lateral reticular nucleus. Brain Res 151:479–491
Arshavsky YI, Gelfand IM, Orlovsky GN, Pavlova GA (1978c) Messages conveyed by spinocerebellar pathways during scratching in the cat. II. Activity of neurons of the ventral spinocerebellar tract. Brain Res 151:493–506
Arshavsky YI, Orlovsky GN, Pavlova GA, Perret C (1978d) Messages conveyed by descending tracts during scratching in the cat. II. Activity of rubrospinal neurons. Brain Res 159:111–123
Blau JJ, Stephen DG, Carello C, Turvey MT (2009) Prism adaptation of underhand throwing: rotational inertia and the primary and latent aftereffects. Neurosci Lett 456:54–58. doi:10.1016/j.neulet.2009.03.071
Boyd LA, Winstein CJ (2004) Cerebellar stroke impairs temporal but not spatial accuracy during implicit motor learning. Neurorehabil Neural Repair 18:134–143. doi:10.1177/0888439004269072
Choi JT, Bastian AJ (2007) Adaptation reveals independent control networks for human walking. Nat Neurosci 10:1055–1062. doi:10.1038/nn1930
Choi JT, Vining EP, Reisman DS, Bastian AJ (2009) Walking flexibility after hemispherectomy: split-belt treadmill adaptation and feedback control. Brain 132:722–733. doi:10.1093/brain/awn333
Deweer B (1986) Pretest cuing after forgetting of a food-motivated maze task in rats: synergistic action of context and reinforcement. Anim Learn Behav 14:249–256
Dingwell JB, Marin LC (2006) Kinematic variability and local dynamic stability of upper body motions when walking at different speeds. J Biomech 39:444–452
Forssberg H, Grillner S, Halbertsma J, Rossignol S (1980) The locomotion of the low spinal cat. II. Interlimb coordination. Acta Physiol Scand 108:283–295
Francis JT (2008) Error generalization as a function of velocity and duration: human reaching movements. Exp Brain Res 186:23–37. doi:10.1007/s00221-007-1202-y
Gordon WC (1981) Mechanisms of cue-induced retention enhancement. In: Spear NE, Miller RR (eds) Information processing in animals: memory mechanisms. Erlbaum, Hillsdale, NJ, pp 319–340
Gordon WC, Mccracken KM, Dessbeech N, Mowrer RR (1981) Mechanisms for the cueing phenomenon—the addition of the cueing context to the training memory. Learn Motiv 12:196–211. doi:10.1016/0023-9690(81)90018-7
Grillner S, Halbertsma J, Nilsson J, Thorstensson A (1979) The adaptation to speed in human locomotion. Brain Res 165:177–182
Holm S (1979) A simple sequentially rejective multiple test procedure. Scand J Stat 6:65–70
Hoogkamer W, Bruijn SM, Potocanac Z, Van Calenbergh F, Swinnen SP, Duysens J (2015) Gait asymmetry during early split-belt walking is related to perception of belt speed difference. J Neurophysiol 114:1705–1712. doi:10.1152/jn.00937.2014
Hwang EJ, Smith MA, Shadmehr R (2006) Adaptation and generalization in acceleration-dependent force fields. Exp Brain Res 169:496–506. doi:10.1007/s00221-005-0163-2
Kitazawa S, Kimura T, Uka T (1997) Prism adaptation of reaching movements: specificity for the velocity of reaching. J Neurosci 17:1481–1492
Krakauer JW, Pine ZM, Ghilardi MF, Ghez C (2000) Learning of visuomotor transformations for vectorial planning of reaching trajectories. J Neurosci 20:8916–8924
Malone LA, Bastian AJ (2010) Thinking about walking: effects of conscious correction versus distraction on locomotor adaptation. J Neurophysiol 103:1954–1962. doi:10.1152/jn.00832.2009
Malone LA, Bastian AJ (2014) Spatial and temporal asymmetries in gait predict split-belt adaptation behavior in stroke. Neurorehabil Neural Repair 28:230–240. doi:10.1177/1545968313505912
Malone LA, Vasudevan EV, Bastian AJ (2011) Motor adaptation training for faster relearning. J Neurosci 31:15136–15143. doi:10.1523/JNEUROSCI.1367-11.2011
Malone LA, Bastian AJ, Torres-Oviedo G (2012) How does the motor system correct for errors in time and space during locomotor adaptation? J Neurophysiol 108:672–683. doi:10.1152/jn.00391.2011
McLean DL, Fetcho JR (2009) Spinal interneurons differentiate sequentially from those driving the fastest swimming movements in larval zebrafish to those driving the slowest ones. J Neurosci 29:13566–13577. doi:10.1523/JNEUROSCI.3277-09.2009
McVea DA, Pearson KG (2007) Long-lasting, context-dependent modification of stepping in the cat after repeated stumbling-corrective responses. J Neurophysiol 97:659–669. doi:10.1152/jn.00921.2006
Mori S, Matsui T, Kuze B, Asanome M, Nakajima K, Matsuyama K (1999) Stimulation of a restricted region in the midline cerebellar white matter evokes coordinated quadrupedal locomotion in the decerebrate cat. J Neurophysiol 82:290–300
Musselman KE, Patrick SK, Vasudevan EV, Bastian AJ, Yang JF (2011) Unique characteristics of motor adaptation during walking in young children. J Neurophysiol 105:2195–2203. doi:10.1152/jn.01002.2010
Orlovskii GN, Severin FV, Shik ML (1966) Locomotion induced by stimulation of the mesencephalon. Dokl Akad Nauk SSSR 169:1223–1226
Reisman DS, Block HJ, Bastian AJ (2005) Interlimb coordination during locomotion: what can be adapted and stored? J Neurophysiol 94:2403–2415. doi:10.1152/jn.00089.2005
Reisman DS, Wityk R, Silver K, Bastian AJ (2007) Locomotor adaptation on a split-belt treadmill can improve walking symmetry post-stroke. Brain 130:1861–1872. doi:10.1093/brain/awm035
Reisman DS, Wityk R, Silver K, Bastian AJ (2009) Split-belt treadmill adaptation transfers to overground walking in persons poststroke. Neurorehabil Neural Repair 23:735–744. doi:10.1177/1545968309332880
Reisman DS, McLean H, Keller J, Danks KA, Bastian AJ (2013) Repeated split-belt treadmill training improves poststroke step length asymmetry. Neurorehabil Neural Repair 27:460–468. doi:10.1177/1545968312474118
Reynolds RF, Bronstein AM (2004) The moving platform aftereffect: limited generalization of a locomotor adaptation. J Neurophysiol 91:92–100. doi:10.1152/jn.00495.2003
Russell DF, Zajac FE (1979) Effects of stimulating Deiters’ nucleus and medial longitudinal fasciculus on the timing of the fictive locomotor rhythm induced in cats by DOPA. Brain Res 177:588–592
Saibene F, Minetti AE (2003) Biomechanical and physiological aspects of legged locomotion in humans. Eur J Appl Physiol 88:297–316. doi:10.1007/s00421-002-0654-9
Shelhamer M, Clendaniel R (2002) Sensory, motor, and combined contexts for context-specific adaptation of saccade gain in humans. Neurosci Lett 332:200–204
Shik ML, Severin FV, Orlovskii GN (1966) Control of walking and running by means of electric stimulation of the midbrain. Biofizika 11:659–666
Taylor JA, Ivry RB (2013) Context-dependent generalization. Front Hum Neurosci 7:171. doi:10.3389/fnhum.2013.00171
Torres-Oviedo G, Bastian AJ (2010) Seeing is believing: effects of visual contextual cues on learning and transfer of locomotor adaptation. J Neurosci 30:17015–17022. doi:10.1523/JNEUROSCI.4205-10.2010
Torres-Oviedo G, Bastian AJ (2012) Natural error patterns enable transfer of motor learning to novel contexts. J Neurophysiol 107:346–356. doi:10.1152/jn.00570.2011
Tulving E, Pearlstone Z (1966) Availability versus accessibility of information in memory for words. J Verbal Learn Verbal Behav 5:381–391
Vasudevan EV, Bastian AJ (2010) Split-belt treadmill adaptation shows different functional networks for fast and slow human walking. J Neurophysiol 103:183–191. doi:10.1152/jn.00501.2009
Vasudevan EV, Bastian AJ, Torres-Oviedo G (2010) Emerging principles in the learning and generalization of new walking patterns. In: Danion F, Latash M (eds) Motor control: theories, experiments, and applications. Oxford University Press, Oxford
Vasudevan EV, Torres-Oviedo G, Morton SM, Yang JF, Bastian AJ (2011) Younger is not always better: development of locomotor adaptation from childhood to adulthood. J Neurosci 31:3055–3065. doi:10.1523/JNEUROSCI.5781-10.2011
Vasudevan EV, Glass RN, Packel AT (2014) Effects of traumatic brain injury on locomotor adaptation. J Neurol Phys Ther 38:172–182. doi:10.1097/NPT.0000000000000049
Acknowledgments
We would like to thank Rebecca Glass and Rachel Snyder for assistance with data collection and Dr. Lisa Muratori for helpful comments. R. J. Hamzey’s current affiliation is the Department of Mechanical Engineering, Boston University, Boston, MA. E. M. Kirk’s current affiliation is Department of Physical Therapy, MGH Institute of Health Professions, Boston, MA.
Funding
This work was funded by an American Heart Association Scientist Development Grant (#12SDG12200001) to E. Vasudevan.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no potential conflicts of interest to disclose.
Rights and permissions
About this article

Cite this article
Hamzey, R.J., Kirk, E.M. & Vasudevan, E.V.L. Gait speed influences aftereffect size following locomotor adaptation, but only in certain environments. Exp Brain Res 234, 1479–1490 (2016). https://doi.org/10.1007/s00221-015-4548-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-015-4548-6