
Abstract
Low voltage ride through (LVRT) is one of the most popular methods to protect doubly fed induction generator (DFIG) against balanced and unbalanced voltage dips. In this study, a novel LVRT capability strategy is enhanced using forcing demagnetization controller (FDC) in DFIG-based wind farm. Moreover, not only stator circuit but also rotor circuit were developed by electromotor force (EMF) for LVRT in DFIG-based wind farm. The transient stability performances of the DFIG with and without the FDC and EMF were compared for three- and two-phase faults. In addition to variations such as 34.5 kV bus voltage and terminal voltage of DFIG, speed of DFIG, electrical torque of DFIG and d-q axis rotor-stator current variations of DFIG were also evaluated. It was seen that the system became stable within a short time using the FDC and EMF.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The doubly fed induction generator (DFIG)-based wind farm has been widely used in recent years with integration to power systems. Today, the wind turbine innovatives have been provided by technologies used in both generators and power electronics. Modern wind farms have the different operation conditions and network connection by power electronic-based converters. Therefore, DFIG- based wind farms have a more widespread in the market national– international. DFIG has been utilized to crowbar units traditionally in order to protect power systems against variations voltage dip in the grid. However, these crowbar units may be insufficiently compensated for transient stability situations in balanced and unbalanced voltage dip. Therefore, variations in LVRT capability methods in DFIG-based wind farm are developed. In Ref. [1], the control method enhanced for LVRT provided optimum power flow during various faults in the grid. Besides, this control method control is used for constant voltage regulation in the DFIG, irrespective of surge of wind. In Ref. [2], maximum LVRT capability of DFIG-based wind farms is carried out for direct power control and vector control during fault cases. In a new approach to LVRT capability, active–reactive power control is examined during voltage dips. Due to active–reactive power control, the system can quickly respond to instability situations [3,4,5]. One of the most commonly used control strategy approaches in DFIG-based wind farm is the control of rotor-side converter and grid-side converter. Both rotor-side converter and grid -side converter are important to protect against exceed current in power system [6]. Enhanced with different current control modeling, these converter units are used widely against grid disturbances [7]. To provide LVRT capability in DFIG-based wind farm, the rotor current control is used in symmetrical voltage faults. As well as rotor current control, space vector control unit and new reference control have been also utilized for transient stability of system during symmetrical and unsymmetrical faults [8,9,10]. Used as new approaches to the LVRT capability, different operation units are also carried out in point common coupling (PCC) of DFIG [11,12,13], while current control protects against transient cases in the rotor-side converter unit of DFIG. Quadratic feedback centralized control model is another control technique used in the DFIG-based wind farm during instability cases [14]. New flux tracking method and rotor electromotor-force circuit model are developed to provide LVRT capability of DFIG during faults in the grid. Both new flux tracking method and rotor electromotor-force circuit model have overcome inrush current occurring in the DFIG [15, 16]. Magnetization and demagnetization control of the DFIG are important not only to improve LVRT capability but also to provide flux control of the rotor-side converter. Besides, the addition of magnetization and demagnetization to natural flux model has been compensated for power system during balanced voltage dips [17,18,19,20]. Power oscillation damping (POD) is important both to compensate voltage dip and to reduce inrush current in the DFIG-based wind farm during grid various faults and thus significantly increases the LVRT capability of the DFIG-based wind farm [21,22,23]. Moreover, flexible AC transmission system (FACTS) devices are used for LVRT capability in DFIG-based wind farm. While FACTS devices such as static synchronous compensator (STATCOM) and static VAR compensator (SVC) are provided to voltage and reactive power control of DFIG-based wind farm during instability conditions, they are also provided coordinate control of DFIG-based wind farm [24,25,26].
In this study, forcing demagnetization control (FDC) modeling is enhanced for LVRT capability of DFIG-based wind farm. Additionally, electromotor force (EMF) in both stator and rotor circuit for balanced faults is developed. A comparison was carried out between responds of the systems with and without stator-rotor EMF as well as FDC during three-phase fault and two-phase fault.
2 Enhancement of demagnetization control in DFIG-based wind farm
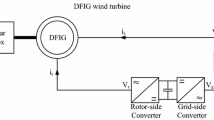
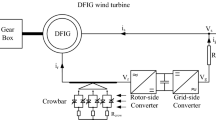
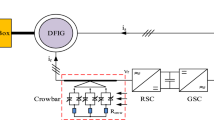
Doubly fed induction generator (DFIG) consists of back to back converter, as well as DC bus and crowbar unit. Circuit model of DFIG is given in Fig. 1.

Circuit model of DFIG
Stator winding of DFIG is directly connected to network; on the other hand, rotor winding of DFIG is connected to converter unit back to back. Magnitude and angle control besides active and reactive power control of DFIG were provided through grid-side converter and rotor-side converter during steady state and voltage dip. Control equations rotor-side converter and grid-side converter are given between Eqs. 1 and 14.
where \(K_{p1}\) and \(K_{i1}\) are the proportional and integrating gains of the power regulator, respectively; \(K_{p2}\) and \(K_{i2}\) are the proportional and integrating gains of the rotor-side converter current regulator, respectively; \(K_{p3}\) and \(K_{i3}\) are the proportional and integrating gains of the grid voltage regulator, respectively; \(I_{dr\_{{ref}}}\) and \(I_{qr\_{{ref}}}\) are the current control references for the d and q axis components of the generator side converter, respectively; \(v_{s\_{{ref}}}\) is the specified terminal voltage reference; and \(P_{{ref}}\) is the active power control reference, \(K_{{pdgrid}}\) and \(K_{{{idgrid}}}\) are the proportional and integrating gains of the DC bus voltage regulator, respectively; \(K_{{pgrid}}\) and \(K_{{igrid}}\) are the proportional and integrating gains of the grid-side converter current regulator, respectively; \(V_{dc\_{{ref}}}\) is the voltage control reference of the DC link; and \(I_{{{qgrid}}\_{{ref}}}\) is the control reference for the q axis component of the grid-side converter current [27].
Active and reactive power of DFIG that were obtained from d-q axis rotor current and grid voltage are given in Eqs. 15 and 16.
Stator-rotor d-q axis voltage and electrical torque equations are shown in equations from 17 to 21.
d-q axis flux equations are given in equations from 22 to 25.
where \({v}_{{ds}}, {v}_{{dr}}, {v}_{{ qs}}, {v}_{{qr}}\) are the d and q axis voltages of the stator and rotor; \({i}_{{ds}}, {i}_{{dr}}, {i}_{{qs}}, {i}_{{qr}}\) are the d and q axis currents of the stator and rotor; \(\lambda _{{ds},} \lambda _{\mathrm{qs},} \lambda _{{dr},} \lambda _{{qr}}\) are the d and q axis fluxes of the stator and rotor; \(w_{s}\) is the angular speed of the stator; s is the slip; \({R}_{{s}}\) and \({R}_{{r}}\) are the stator and rotor resistance; \({L}_{{s}}\) and \({L}_{{r}}\) are the stator and rotor inductance; \({L}_{{m}}\) is the magnetic inductance; and M is the torque [28,29,30].
d-q axis rotor dynamic voltage equations are shown in Eq. 26 [31].
where \(\sigma \) is the rotor damping coefficient. Rotor leakage coefficient is shown in Eq. 27.
Derivations of d-q axis stator flux have been neglected in reduced order model which are used for stator dynamic. D-q axis rotor voltage and EMF equations achieved in this situation are given in Eqs. 28 and 29.
It is in steady-state operation conditions that stator resistance is ignored for small values. According to the new condition, the steady-state stator flux is shown in Eq. 30.
Stator flux, as given in Eq. 30, is determined by grid voltage standing for the forced response of the system, and forced stator flux \(\lambda _{sf}\) is used to represent it. Therefore, \(\lambda _{sf}\) rotates synchronously, and its amplitude and the grid voltage are in proportion each other. Forced EMF of rotor with stator d-q axis flux is shown in Eq. 31.
The forced magnetizing current achieved by neglecting the leakage inductance is given in Eq. 32.
For the DFIG, EMF, described as the energy stored in the magnetic field, is a DC value in the steady state and it stands in proportion to the square of grid voltage. It is unlikely for the stator flux to change immediately in the initial time condition during symmetric grid voltage dip, which is possible to lead to an immediate change in the magnetic state of the machine, and it is hardly possible to come out in a practical point of view [31]. On the other hand, a gradual change may come out in the stator flux. The continuity of stator flux and magnetic energy is ensured through the generation of natural stator flux. The stator flux has been regulated as in Eqs. 33, 34, 35 and 36 by using reduced order model in stator side [17].
A correct estimation of natural EMF is possible, rendering it to be fully compensated under reduced grid fault [32], leading the RSC to acting like an open circuit to the natural stator component. Subsequently, the natural stator current is used to induce the natural stator flux. Natural stator current and forcing stator current are shown in and Eqs. 37 and 38.
Considering \(i_{rn}=0\), changes in the natural and forced stator flux during grid fault are given in Eqs. 39 and 40.
It can be seen that the natural stator flux can be referred to as dc component and it is fixed to the stator winding. Therefore, it can also be called DC stator flux [31]. During the transient process, the DC stator flux changes as nonlinear with respect to the stator flux time constant. Likewise, natural and forcing stator flux generated during the grid fault is given in Eqs. 41 and 42.
where t is the fault time; t0 is the before fault time; and t1 is the after fault time. The rotor EMF consists of two parts, one induced by the natural and the other one by forced rotor flux during the transient process in the grid fault. The natural and forced rotor flux equations are given in Eqs. 43 and 44.
To reduce the effects of natural stator flux and enhance system LVRT capability under balanced grid fault, a forced demagnetization control is suggested as it does not require any system parameter information. Control modeling enhanced with FDC in DFIG-based wind farm is given in Fig. 2a, b.

a Demagnetization control without FDC in DFIG. b Demagnetization control with FDC in DFIG

Test system
The active and reactive current may coexist by demagnetizing current during grid fault. The addition of reference d-q axis current and natural rotor flux may give rise to total rotor current. Given a balanced grid fault, demagnetizing rotor current, as opposed to the natural stator current, is integrated into the rotor circuit. The d-q axis reference current is shown in Eq. 45.
where K is a positive demagnetization coefficient. In practice, a fixed value can be assigned to K, which can be dynamically manipulated in line with working conditions of the system. Limiting K somewhere between 1 and −1, a little lower than the critical point, is strongly suggested to ensure the system stability.
3 Simulation study
The 0.85 MW DFIG-based wind farm connected to power system is given in Fig. 3.
The connection of wind power plant to a 34.5 kV system was conducted through a 2.6 MW, 0.69 kV Y/34.5 kV \(\Delta \) transformers [33]. The distance between the plant and the 34.5 kV grid was one km. The transmission network connection was provided by a 0.69 kV Y/34.5 kV \(\Delta \) transformer. The wind speed was taken as a constant 8 m/s. The transformers saturation has been ignored. Network short-circuit power and the X/R rate were determined as 2500 MVA, and 7, respectively. Stator-rotor resistance stator-rotor inductance mutual inductance and inertia value are shown in Table 1.
4 Simulation results
The effect on the FDC of the system parameters was analyzed with three- phase fault and two-phase fault. As the first transient event, a three-phase fault was taken. The three-phase fault was generated in the middle of the transmission line in the time interval between 0.6 and 0.7 s. For the DFIG with and without the FDC, the 34.5 kV bus voltage, variations in terminal voltage of DFIG, angular speed of DFIG, electrical torque of DFIG and d-q axis stator current of DFIG were found. Figure 4a–f. shows the comparisons.

a 34.5 kV bus voltage in three-phase fault. b Terminal voltage of DFIG in three-phase fault. c Angular speed of DFIG in three-phase fault. d Electrical torque variations of DFIG in three-phase fault. e d axis stator current variations of DFIG in three-phase fault. f q axis stator current variations of DFIG in three-phase fault
As shown in Fig. 4a, b, values of 34.5 kV bus voltage and terminal voltage of DFIG had lower values and the system was stabilized within a shorter time with the use of FDC. The 34.5 kV bus voltage was about 0.575 p.u. when DCC was used, while it turned to be 0.555 p.u. without the FDC. Furthermore, oscillations in angular speed, electrical torque and d-q axis stator currents showed significantly lower values when FDC was used, while DFIG, angular speed, electrical torque and d-q axes stator currents with FDC were stabilized in nearly 2.5, 3.5, 1.7, 1.7 s after three-phase fault, respectively.
Another two-phase fault was created as the second transient event. The fault was generated in the B 34.5 kV bus in the time intervals between 0.6 and 0.7 s. The 34.5 kV bus voltage, variations in terminal voltage of DFIG, angular speed of DFIG, electrical torque of DFIG and d-q axis stator current of DFIG were found with and without the FDC in the DFIG model. Figure 5a–f shows the comparisons.

a 34.5 kV bus voltage in two-phase fault. b Terminal voltage of DFIG in two-phase fault. c Angular speed of DFIG in two-phase fault. d Electrical torque variations of DFIG in two-phase fault. e d axis stator current variations of DFIG in two-phase fault. f q axis stator current variations of DFIG in two-phase fault
In the two-phase fault event in middle line, while the voltage values of 34.5 kV bus turned out to be about 0.57 p.u. without the FDC in the DFIG, DFIG terminal voltage turned out to be about 0.2 p.u. without the FDC in the DFIG. However, there was increase in values reaching 0.575 0.22 p.u. when FDC was used in the DFIG, respectively. As was the case in the first three-phase fault, the FDC usage also contributed to damping oscillations that came out at the time in several parameters like the angular speed of DFIG, electrical torque of DFIG and d-q axis stator current of DFIG variations, while DFIG, angular speed, electrical torque and d-q axes stator currents with FDC were stabilized in nearly 2.5, 3.5, 1.7, 1.7 s after two-phase fault respectively,
5 Conclusion
In this study, both natural flux control and forcing flux control were applied for a network-connected DFIG-based wind farm. Stator electromotor force and rotor electromotor forces were examined in this study to show their effects on DFIG-based wind farm. The natural flux and forcing flux, besides the FDC, were developed in the DFIG. A comparison was drawn between the transient cases of the system with and without the FDC during three-phase and two- phase faults. It was seen as a result of three-phase fault and two-phase fault analysis that FDC modeling used in DFIG enables the system to be stable within a very short period of time. It was further found that oscillations decreased following the variation transient events such as three-phase fault and two-phase fault.
References
Kyaw MM, Ramachandaramurthy VK (2011) Fault ride through and voltage regulation for grid connected wind turbine. Renew Energ 36:206–215
Sarkhanloo S, Yazdankhah MAS, Kazemzadeh R (2012) A new control strategy for small wind farm with capabilities of supplying required reactive power and transient stability improvement. Renew Energ 44:32–39
Mohseni M, Islam SM (2012) Transient control of DFIG-based wind power plants in compliance with the Australian grid code. IEEE Trans Power Electron 27(6):2813–2824
Xie D, Xu Z, Yang L, Ostergaard J, Xue Y, Wong KP (2013) A comprehensive LVRT control strategy for DFIG wind turbines with enhanced reactive power support. IEEE Trans Power Syst 28(3):3302–3310
Meegahapola LG, Littler T, Flynn D (2010) Decoupled-DFIG fault ride-through strategy for enhanced stability performance during grid faults. IEEE Trans Sust Energ 1(3):152–162
Hu S, Lin X, Kang Y, Zou X (2011) An improved low-voltage ride-through control strategy of doubly fed induction generator during grid faults. IEEE Trans Power Electron 26(12):3653–3665
Mohseni M, Masoum MA, Islam SM (2011) Low and high voltage ride-through of DFIG wind turbines using hybrid current controlled converters. Electr Power Syst Res 81(7):1456–1465
Ling Y, Xu C (2013) Rotor current dynamics of doubly fed induction generators during grid voltage dip and rise. Electr Power Energ Syst 44(1):17–24
Ling Y, Xu C, Ningbo W (2013) Rotor current transient analysis of DFIG-based wind turbines during symmetrical voltage faults. Energy Convers Manag 76:910–917
da Costa JP, Pinheiro H, Degner T, Arnold G (2011) Robust controller for DFIGs of grid-connected wind turbines. IEEE Trans Power Electron 58(9):4023–4038
Yang L, Xu Z, Ostergaard J, Dong ZY, Wong KP (2012) Advanced control strategy of DFIG wind turbines for power system fault ride through. IEEE Trans Power Syst 27(2):713–722
Rahimi M, Parniani M (2010) Grid-fault ride-through analysis and control of wind turbines with doubly fed induction generators. Electr Power Syst Res 80(2):184–196
Dai J, Xu D, Wu B, Zargari NR (2011) Unified DC-link current control for low-voltage ride-through in current-source-converter-based wind energy conversion systems. IEEE Trans Power Electron 26(1):288–297
Hossain MJ, Saha TK, Mithulananthan N, Pota HR (2013) Control strategies for augmenting LVRT capability of DFIGs in interconnected power systems. IEEE Trans Ind Electron 60(6):2510–2522
Xiao S, Yang G, Zhou H, Geng H (2013) An LVRT control strategy based on flux linkage tracking for DFIG-based WECS. IEEE Trans Ind Electron 60(7):2820–2832
Mohsen R, Parniani M (2010) Efficient control scheme of wind turbines with doubly fed induction generators for low voltage ride-through capability enhancement. IET Renew Power Gen 4(3):242–52
Döşoğlu MK (2016) A new approach for low voltage ride through capability in DFIG based wind farm. Int J Electr Power Energ Syst 83:251–258
Nguyen TDV, Fujita G (2012) Nonlinear control of DFIG under symmetrical voltage dips with demagnetizing current solution. In: IEEE international conference on in power system technology (POWERCON) pp 1–5
Linyuan Z, Jinjun L, Yangque Z, Sizhan Z (2012) Robust demagnetization control of doubly fed induction generator during grid faults. In: IEEE 7th international power electronics and motion control conference (IPEMC), June, pp 1446-1451
Zhou L, Liu J, Zhou S (2015) Improved demagnetization control of a doubly-fed induction generator under balanced grid fault. IEEE Trans Power Electron 30(12):6695–6705
Mokhtari M, Farrokh A (2014) Toward wide-area oscillation control through doubly-fed induction generator wind farms. IEEE Trans Power Syst 29(6):2985–2992
Knüppel T, Nielsen JN, Jensen KH, Dixon A, Østergaard J (2013) Power oscillation damping capabilities of wind power plant with full converter wind turbines considering its distributed and modular characteristics. IET Renew Power Gener 7(5):431–442
Leon AE, Solsona JA (2014) Power oscillation damping improvement by adding multiple wind farms to wide-area coordinating controls. IEEE Trans Power Syst 29(3):1356–1364
Molinas M, Suul JA, Undeland T (2008) Low voltage ride through of wind farms with cage generators: STATCOM versus SVC. IEEE Trans Power Electron 23(3):1104–1117
Kumar NS, Gokulakrishnan J (2011) Impact of FACTS controllers on the stability of power systems connected with doubly fed induction generators. Int J Electr Power Energ Syst 33(5):1172–1184
Amaris H, Alonso M (2011) Coordinated reactive power management in power networks with wind turbines and FACTS devices. Energ Convers Manag 52(7):2575–2586
Wu F, Zhang XP, Godfrey K, Ju P (2007) Small signal stability analysis and optimal control of a wind turbine with doubly fed induction generator. IET Gener Transm and Distrib 1(5):751–760
Ekanayake JB, Holdsworth L, Jenkins N (2003) Comparison of 5th order and 3rd order machine models for double fed induction generators (DFIG) wind turbines. Electr Power Syst Res 67(3):207–215
Lei Y, Mullane A, Lightbody G, Yacamini R (2006) Modeling of the wind turbine with a doubly fed induction generator for grid integration studies. IEEE Trans Energ Convers 21(1):257–264
Krause PC (2002) Analysis of electric machinery, 2nd edn. McGraw-Hill, New York
Lopez J, Sanchis P, Roboam X, Marroyo L (2007) Dynamic behavior of the doubly-fed induction generator during three-phase voltage dips. IEEE Trans Energ Convers 22(3):709–717
Liang J, Qiao W, Harley RG (2010) Feed-forward transient current control for low-voltage ride-through enhancement of DFIG wind turbines. IEEE Trans Energ Convers 25(3):836–843
García-Gracia M, Comech MP, Sallan J, Llombart A (2008) Modelling wind farms for grid disturbance studies. Renew Energ 33(9):2109–2121
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Döşoğlu, M.K., Güvenç, U., Sönmez, Y. et al. Enhancement of demagnetization control for low-voltage ride-through capability in DFIG-based wind farm. Electr Eng 100, 491–498 (2018). https://doi.org/10.1007/s00202-017-0522-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00202-017-0522-6