
Abstract
Low-voltage ride through (LVRT) is important for system compensation and reliable operation of the system during balance and unbalanced voltage dips. In this study, a new LVRT capability method was developed using active and passive compensator in doubly fed induction generator (DFIG)-based wind turbines. While the active compensator provides the control of the rotor-side converter and grid-side converters of DFIG, the passive compensator decreases the stator and rotor over currents and injects reactive power into the network to support the grid voltage DFIG. Besides, rotor electromotive force is developed to improve LVRT capability against not only symmetrical but also asymmetrical faults of DFIG. It was found that the system became stable in a short time and oscillations damped using active and passive compensator modeling.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
For the stable operation of power systems, the grid codes must be within certain standards during the grid connection of wind turbines. Wind turbines need to remain connected to grid and meet reactive power requirement during symmetrical and asymmetrical faults called LVRT capability. The DFIG is one of the most popularly used systems in wind power generation systems owing to its advantages such as active-reactive power control and reduced mechanical problems (Abad et al. 2011). There are improvement control methods in LVRT capability in DFIG. Feed-forward control model of rotor-side converter for LVRT capability in DFIG is enhanced. Besides, feed-forward control is met through reactive power requirement of the system (Liang et al. 2010; Liang and Harley 2011). To provide voltage support during the grid voltage dip, the DC-link voltage control in grid-side converter of DFIG is implemented (Yang et al. 2012). Thanks to DC-link voltage control proposed for LVRT, oscillations in DFIG are reduced. Hysteresis-based current regulators for the inner current control loops are enhanced. This current regulator supports fast transient response of the system and LVRT capabilities of the DFIG (Mohseni and Islam 2012). To overcome the voltage dip problem, a new flux linkage model is enhanced depending on short-circuit rotor current for LVRT capability in DFIG. The new flux linkage controls the system against system distribution with control algorithm of rotor-side converter during voltage dip (Xiao et al. 2013). Enhanced for LVRT capability in DFIG, vector control can remove problems such as voltage dip, inrush current and unbalanced active-reactive power in symmetrical and unsymmetrical faults. Moreover, series grid-side converter overcomes these problems that occur during various faults (Yao et al. 2013). The combination of grid-side converter and rotor-side converter in DFIG supports active-reactive power flow and robust voltage control for LVRT capability depending on grid codes (Flannery and Venkataramanan 2008). Coordinated control of rotor-side converter and grid-side converters in DFIG are carried out for LVRT capability. Coordinated control provided with converters for LVRT has yielded effective results (Mirzakhani et al. 2019). To improve generator configuration and the control of parameters during balanced and unbalanced faults, decoupled d and q controller enhanced depending on time domain model in the DFIG is applied (Kasem et al. 2008). As a different method for LVRT capability in DFIG, stator EMF and rotor EMF have been used. While stator EMF both provides stator dynamic control and increases performance of the simulation operation during symmetrical and unsymmetrical faults, rotor EMF provides dynamic control of the rotor against transient conditions (Döşoğlu 2017a; Döşoğlu 2016a, b). Besides, Rotor EMF has an important role in improving LVRT capability and decreasing inrush current during symmetrical voltage in DFIG (Rahimi and Azizi 2019; Rahimi and Parniani 2010). To decrease crowbar protection activation problems and limit complications for LVRT capability in the DFIG system, a new DC-link switchable resistive-type fault current limiter and stator damping resistor unit and dynamic voltage restorer are used (Zheng et al. 2019; Rahimi and Parniani 2014; Sitharthan et al. 2018). Demagnetization methods are enhanced with different control strategies to reduce the oscillations of the transient current for LVRT capability in DFIG. Moreover, dynamic behaviors of the system during voltage dips in the DFIG are examined with demagnetizing current control model enhanced in the DFIG (Döşoğlu et al. 2018; Zhou and Blaabjerg 2018). Energy storage system is used to enhance LVRT capability in DFIG during not only normal conditions but also during transient conditions. Energy storage system devices such as supercapacitor and battery are provided to control the DC-link voltage generating active power with charge–discharge time (Abbey and Joos 2007; Huang et al. 2019). Flexible AC transmission systems (FACTS) devices are important for LVRT capability in DFIG. Different strategies for parallel compensator such as static synchronous compensator (STATCOM) and static var compensator (SVC) are enhanced for LVRT capability during symmetrical and asymmetrical fault (Gounder et al. 2016; Rashad et al. 2019; Rezaie and Kazemi-Rahbar 2019).
In Refs. (Döşoğlu 2016a, 2017b; Döşoğlu et al. 2018), stator-rotor EMF-based demagnetization control, stator-rotor EMF-based forcing demagnetization controller and stator-rotor EMF-based positive–negative sequence dynamic modeling were developed for the LVRT capability in a DFIG. However, stator EMF and constant flux linkage cause the stator flux not to follow the stator voltage instantaneous chances in Refs. (Döşoğlu 2016a, 2017b; Döşoğlu et al. 2018). In this study, a novel active–passive LVRT capability method was enhanced using rotor EMF models, positive sequence model, negative sequence model and natural-forcing flux model for symmetrical and unsymmetrical faults. Besides, positive–negative sequence models and natural flux were used as references (Mohammadi et al. 2016). In this study, positive–negative sequence models, natural-forcing components and rotor EMF models for the test system. 34.5 kV bus voltage, terminal voltage, angular speed, electrical torque, d and q axis stator-rotor current variations were investigated. As a result of this study, it was found that the active–passive LVRT capability method yielded efficient results in three phase fault and two phase fault.
2 Modeling of the DFIG
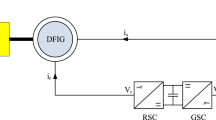
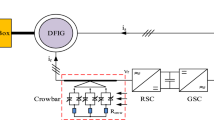
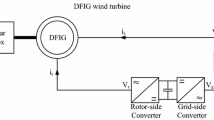
Doubly fed induction generator (DFIG) consists of rotor-side converter, grid-side converter and crowbar unit. Circuit model of DFIG is given in Fig. 1.

DFIG circuit model
Rotor-side converter and grid-side converter converters play important roles in voltage and angle control, active and reactive power control of DFIG during steady-state and transient state. Rotor-side converter controller used in Eqs. 1 and 8 provides torque and active power control depending on terminal voltage. Besides, controller used in Eqs. 9 and 14 provides reactive power control depending on DC-link voltage grid-side converter (Wu et al. 2007). Control equations of the rotor-side converter and the grid-side converter in DFIG are given between Eqs. 1 and 14.
where, x1, x2, x3, x4 are control equations of the rotor-side converter, respectively; \(K_{{{\text{p}}1}}\) and \(K_{{{\text{i}}1}}\) are the proportional and integrating gains of the power regulator, respectively; \(K_{{{\text{p}}2}}\) and \(K_{{{\text{i}}2}}\) are the proportional and integrating gains of the rotor-side converter current regulator, respectively; \(K_{{{\text{p}}3}}\) and \(K_{{{\text{i}}3}}\) are the proportional and integrating gains of the grid voltage regulator, respectively; \(i_{{{\text{dr}}\_{\text{ref}}}}\) and \(i_{{{\text{qr}}\_{\text{ref}}}}\) are the current control references for the d and q axis components of the rotor-side converter, respectively; vs and \(v_{{{\text{s}}\_{\text{ref}}}}\) are the specified terminal voltage and specified reference voltage, respectively; Ps and \(P_{\text{ref}}\) is the active power control reference, respectively; s is slip, ws is the angular speed of the stator, Lm is the magnetic inductance, Lrr is sum of the rotor inductance and the magnetic inductance \(\Delta v\) and \(\Delta P\) are voltage and active power variation value, respectively; vdr, vqr are the d and q axis voltages of the rotor, respectively; ids, idr, iqs, iqr are the d and q axis currents of the stator and rotor, respectively; x5, x6, x7 are control equations of the grid-side converter, respectively; \(K_{\text{pdgrid}}\) and \(K_{\text{idgrid}}\) are the proportional and integrating gains of the DC bus voltage regulator, respectively; \(K_{\text{pgrid}}\) and \(K_{\text{igrid}}\) are the proportional and integrating gains of the grid-side converter current regulator, respectively; Vdc and \(V_{{{\text{dc}}\_{\text{ref}}}}\) are the DC-link voltage and voltage reference of the DC-link, respectively; \(i_{\text{dgrid}}\) and \(i_{{{\text{dgrid}}\_{\text{ref}}}}\) are \(d\) axis component of the grid-side converter current and the control reference for the q axis component of the grid-side converter current, respectively; \(i_{\text{qgrid}}\) and \(i_{{{\text{qgrid}}\_{\text{ref}}}}\) are q axis component of the grid-side converter current and the control reference for the \(q\) axis component of the grid-side converter current, respectively; \(\Delta v_{\text{dgrid}}\) and \(\Delta v_{\text{qgrid}}\) are the d and q axis of the grid-side converter voltage variation value, respectively; \(\Delta v_{\text{dc}}\) is the DC-link voltage variation value.
DFIG d and q axis stator and rotor voltage are given in Eqs. 15 and 16, while DFIG d and q axis stator and rotor flux are given in Eqs. 17 and 18.
where, vds, vdr, vqs, vqr are the d and q axis voltages of the stator and rotor; ids, idr, iqs, iqr are the d and q axis currents of the stator and rotor; λds, λqs, λdr, λqr are the d and q axis fluxes of the stator and rotor; ws is the angular speed of the stator; s is the slip; Rs and Rr are the stator and rotor resistance; Ls and Lr are the stator and rotor inductance; Lm is the magnetic inductance (Krause 2002; Ekanayake et al. 2003; Slootweg et al. 2011).
3 Enhancement of Dynamic Modeling in DFIG
To enhance new active–passive compensator modeling for in DFIG, positive sequence model and negative sequence model can be used in stator voltage at the time of faults. Stator d and q axis voltage equation is given in Eq. 19. (Mohammadi et al. 2014, 2016).
where ws is the angular speed of the reference frame. Vs1 and Vs2 are positive sequence voltage and negative sequence voltage, respectively. Neglecting the small voltage drop of the stator resistance, the steady-state components of the stator flux in the grid faults are given in Eq. 20.
where, ss presents steady-state component. In the circuit theory, the flux is a state variable and cannot chance discontinuities and must be continuously different from its initial state to its steady state. Hence, stator and rotor steady-state component, natural-forcing and enhanced forcing flux components are shown in Eqs. 21 and 22.
The stator d and q axis rotor flux components induced by the rotor EMF voltage. The rotor EMF voltage components can be shown in the following way:
where, M is simplification coefficient. Positive sequence, negative sequence and natural-forcing components of the stator flux are given in Eq. 23. The stator flux positive sequence leads to only the first part of this equation under normal conditions, which is not a large one, but only proportional to the frequency of slip. The first part of the equation turns out to be small in transient conditions while the second and third parts turn out to be big, proportional to (2 − s) and (1 − S), respectively. Because there is no power support to the grid, the rotor speed increases with exceeded rotor currents and oscillations in stator contributing to electromagnetic torque oscillations. This might bring about the destruction of the rotor-side converter in DFIG. Therefore, it is not possible for the DFIG to supply support power and voltage for the system. The active compensator is used to support power and grid voltage in DFIG. Active compensator provides the control of the rotor-side converter and grid-side converter of DFIG to minimize exceed rotor currents and to inject reactive power into the grid to support the grid voltage, respectively. For active compensator model, enhanced d and q axis stator flux equation is given in Eq. 24.
Turning Eq. 24 into positive sequence model, negative sequence model, and natural-forcing components can be obtained as:
In Eqs. 25, 26, 27, and 28, the positive sequence model, negative sequence model, natural and forcing components of the d and q axis stator flux in the d and q reference frame are given. In order to reduce the exceed currents and oscillations in the stator-rotor circuit during grid faults, positive sequence, negative sequence, natural and forcing components of the stator current values are presented as the reference values for the rotor current.
The stator current oscillations are shown with a factor equal to 1/(Ls + Lm). Equation 33 is given as total values of Eqs. 29, 30, 31 and 32.
Reference d and q axis rotor currents obtained depending on the d and q axis rotor current components are given in Eqs. 34 and 35.
Owing to the rotor-side converter limited capacity, it may not provide required rotor currents of the LVRT capability at the beginning of voltage dips. Therefore, the passive compensator is used to provide the rotor current limits at the beginning of voltage dips. Turning Eq. 17 into Eq. 15, the stator voltage in the stator stationary reference can be obtained as:
Turning the rotor current from Eq. 18 into Eq. 16, the derivative of the rotor flux can be obtained as:
Turning Eq. 37 into Eq. 36, d and q axis stator voltage can be obtained as:
Therefore, the stator voltage in the stator stationary reference frame and stator transient resistance is to be shown in the following way:
Due to the increased rotor resistance, not only the stator transient resistance value has increased but also the stator flux value is increased, too. Passive protection is limited to stator transient resistance and stator flux value. Besides, it provides support power and voltage of rotor-side converter and grid-side converter in DFIG. The block diagram-enhanced LVRT control model of the rotor-side converter is shown in Fig. 2.

Block diagram of the enhanced dynamic model of rotor-side converter
The rotor reference current is established to determine the stator active and reactive powers in steady-state operation, yet it supplies the maximum capacity of the rotor-side converter to enhance the LVRT capability in grid fault conditions. So as to start LVRT control quickly, establishment of the grid fault is of great importance. In this study, a new LVRT model based on positive sequence, negative sequence, natural and forcing flux model component are improved. Moreover, in this study, system currents depend on the natural component, with and without active–passive compensator, hence, natural stator flux damping is linked to the natural stator current. The amount of power consumed by the stator resistance has to do with the amount of natural stator current, which leads to accelerated natural-flux damping. Besides, fault detection was selected as t = 0.1 s. Vs1 stands for the positive sequence component amplitude and used to determine the occurrence of a voltage dip. Vs is the normal stator voltage amplitude. Occurrence of a voltage dip is presumed whenever Vs1 <= 0.9Vs. In this case, the controls are switched to the proposed LVRT instantly. If Vs1 > 0.9Vs, however, the suggested LVRT control is turned off.
In conventional control method, during the steady-state condition, the rotor current references are calculated to produce the stator active and reactive powers. However, during the transient state condition, in order to use the maximum capacity of the rotor-side converter to improve the LVRT capability, the power controller outputs are disconnected and the rotor current references are directly determined by the proposed control method. During steady-state operation, the grid-side converter provides DC-link voltage control and reactive power control in the grid. Block diagram of the dynamic model of grid-side converter is given in Fig. 3.

Block diagram of grid-side converter modeling
To decrease the exceed currents and losses in rotor-side converter and grid-side converter of DFIG, the reactive power reference of the grid-side converter is set to zero in steady-state operations. However, in transient state conditions, reactive power injection must be used to meet the grid code requirements. Hence, in this study, grid-side converter is compensated for maximum reactive power during the grid faults.
4 Simulation Study
1.5 MW DFIG-connected power system is shown in Fig. 4 (Döşoğlu and Arsoy 2016).

Test system
Dynamic modeling of the DFIG model with a positive sequence model, negative sequence model, natural-forcing flux model and control was carried out in this study. The DFIG was connected to a 34.5 kV system through transformers with the values of 50 MVA, 154 Y/34.5 kV Y and 2.6 MVA, 34.5 Δ/0.4 kV Y. The distance from the wind turbine to the 34.5 kV grids was selected as 10 km with the wind speed being constant 8 m/s. While the 154 kV short-circuit power of the grid was selected as 2500 MVA, the X/R rate was selected as 6. In the DFIG, generator parameters were selected as stator resistance value 0.00706 ohm, rotor resistance value 0.005 ohm, stator inductance value 0.171 Henry, rotor inductance value 0.156 Henry, magnetization inductance value 2.9 Henry.
5 Simulation Results
Two transient events were used in analyzing the influence of the positive sequence model, negative sequence model, and natural-forcing flux model on the system parameters. Three phase fault led to the first transient event in 34.5 kV bus. The variations in 34 kV bus voltage, terminal voltage, angular speed, electrical torque, d and q axis stator-rotor currents as a result of three phase fault that came out between 0.6 and 0.65 s with and without the proposed strategy are given in Fig. 5.


The system simulation results in three phase fault
Figure 5 shows that maximum values of 34 kV bus voltage and DFIG output voltage were reduced and the system became stable in a time span shorter than the case in conventional strategy use when positive sequence model, negative sequence model, natural-forcing flux model were utilized. The new strategy proposed in this study led the 34.5 kV bus voltage and terminal voltage to be nearly 0.175 p.u., 0.3 p.u., respectively. However, with the use of conventional strategy, these values were found to be 0 p.u., 0.28 p.u., respectively. While Oscillations decrease in 34.5 kV bus voltage and terminal voltage with proposed strategy in the three phase fault, they increase DFIG parameters without proposed strategy in the three phase fault. Besides, using the positive sequence model, negative sequence model, and natural-flux model led to remarkable reductions in oscillations in angular speed, electrical torque and d and q axis stator-rotor currents. When the positive, negative sequence model, natural-forcing flux model and rotor EMF were not used and the system was evaluated for oscillations in the three phase fault analysis, 34.5 kV bus voltage was between 0.0 and 1.5 p.u, terminal voltage was between 0.1 and 2.4 p.u, angular speed was between 1 and 1.15 p.u, electrical torque was between − 0.2 and 0.35 p.u, d axis stator current was between − 0.38 and 0.58 p.u and q axis stator current was between − 0.28 and 0.18 p.u., d axis rotor current was between − 0.05 and 0.17 p.u and q axis rotor current was between − 0.09 and 0.02 p.u. When the positive, negative sequence model, natural-forcing flux model and rotor EMF were used and the system was evaluated for oscillations in the three phase fault analysis, 34.5 kV bus voltage was between 0.15 and 1.17 p.u, terminal voltage was between 0.2 and 1.51 p.u, angular speed was between 0.99 and 0.996 p.u, electrical torque was between 0.0 and 0.05 p.u, d axis stator current was between − 0.05 and 0.12 p.u and q axis stator current was between − 0.08 and 0.02 p.u., d axis rotor current was between − 0.06 and 0.15 p.u and q axis rotor current was between − 0.08 and 0.028 p.u.
The other transient event was investigated with two phase fault in 34.5 kV bus. The variations in 34 kV bus voltage, terminal voltage, angular speed, electrical torque and d and q axis stator-rotor currents as a result of two phase fault that came out between 0.6 and 0.65 s with and without the proposed strategy are given in Fig. 6.


The system simulation results in two phase fault
Figure 6 shows that maximum values of 34 kV bus voltage and terminal voltage were reduced and the system became stable in a time span shorter than the case in conventional strategy use when positive sequence model, negative sequence model, natural-forcing flux model were utilized. The new strategy proposed in this study led the 34.5 kV bus voltage to be nearly 0.6 p.u., whereas this value was found to be 0.3 p.u. with the use of conventional strategy. While oscillations increased in 34.5 kV bus voltage and terminal voltage of DFIG in the two phase fault, they decreased in DFIG parameters such as angular speed, electrical torque and d and q axis stator-rotor currents in the two phase fault. Besides, using the strategy proposed in this study led to remarkable reductions in oscillations in angular speed, electrical torque, and d and q axis stator-rotor currents. When the positive, negative sequence model, natural-forcing flux model and rotor EMF were not used and the system was evaluated for oscillations in the two phase fault analysis, 34.5 kV bus voltage was between 0.3 and 1.5 p.u, terminal voltage was between 0.2 and 1.2 p.u, angular speed was between 1 and 1.1 p.u, electrical torque was between − 0.0 and 0.02 p.u, d axis stator current was between 0.0 and 0.1 p.u and q axis stator current was between 0.05 and 0.0 p.u. d axis rotor current was between − 0.02 and 0.12 p.u and q axis rotor current was between − 0.05 and 0.0 p.u. When the positive, negative sequence model, natural-forcing flux model and rotor EMF were used and the system was evaluated for oscillations in the 2-phase fault analysis, 34.5 kV bus voltage was between 0.6 and 1.04 p.u, terminal voltage was between 1 and 1.08 p.u, angular speed was between 0.99 and 0.996 p.u, electrical torque was between 0 and 0.045 p.u, d axis stator current was between 0.0 and 0.1 p.u and q axis stator current was between − 0.05 and 0.0 p.u., d axis rotor current was between 0.0 and 0.1 p.u and q axis rotor current was between − 0.05 and 0.0 p.u.
6 Conclusions
In this study, enhancement of new active–passive compensator models for LVRT capability in DFIG was proposed. Enhancing positive sequence model, negative sequence model, and natural-forcing flux model paved the way for fewer oscillations in the presence of balanced and unbalanced faults. Utilizing the positive sequence, negative sequence, natural-forcing flux model during symmetrical and unsymmetrical faults led to increase in 34.5 kV bus voltage and terminal voltage. Under transient state operation, rotor EMF was found to play a great role in LVRT capability in DFIG. Owing to the new enhanced model, voltages, angular speed and torque, d and q axis stator-rotor current variations are carried out successfully in rotor-side converter and grid-side converter of DFIG. It was found as a result of the analysis of balanced and unbalanced faults that oscillations following the transient events were damped in a very short period of time coupling positive sequence negative sequence, natural-forcing flux model, and rotor EMF model to the DFIG.
References
Abad G, Lopez J, Rodriguez M, Marroyo L, Iwanski G (2011) Doubly fed induction machine: modeling and control for wind energy generation, vol 85. Wiley, New York
Abbey C, Joos G (2007) Supercapacitor energy storage for wind energy applications. IEEE Trans Ind Appl 43(3):769–776
Döşoğlu MK (2016a) A new approach for low voltage ride through capability in DFIG based wind farm. Int J Electr Power Energy Syst 83:251–258
Döşoğlu MK (2016b) Hybrid low voltage ride through enhancement for transient stability capability in wind farms. Int J Electr Power Energy Syst 78:655–662
Döşoğlu MK (2017a) Enhancement of SDRU and RCC for low voltage ride through capability in DFIG based wind farm. Electr Eng 99(2):673–683
Döşoğlu MK (2017b) Nonlinear dynamic modeling for fault ride-through capability of DFIG-based wind farm. Nonlinear Dyn 89(4):2683–2694
Döşoğlu MK, Arsoy AB (2016) Enhancement of a reduced order doubly fed induction generator model for wind farm transient stability analyses. Turk J Electr Eng Comput Sci 24(4):2124–2134
Döşoğlu MK, Güvenç U, Sönmez Y, Yılmaz C (2018) Enhancement of demagnetization control for low-voltage ride-through capability in DFIG-based wind farm. Electr Eng 100(2):491–498
Ekanayake JB, Holdsworth L, Jenkins N (2003) Comparison of 5th order and 3rd order machine models for doubly fed induction generator (DFIG) wind turbines. Electr Power Syst Res 67(3):207–215
Flannery PS, Venkataramanan G (2008) A fault tolerant doubly fed induction generator wind turbine using a parallel grid side rectifier and series grid side converter. IEEE Trans Power Electron 23(3):1126–1135
Gounder YK, Nanjundappan D, Boominathan V (2016) Enhancement of transient stability of distribution system with SCIG and DFIG based wind farms using STATCOM. IET Renew Power Gener 10(8):1171–1180
Huang S, Wu Q, Guo Y, Rong F (2019) Optimal active power control based on MPC for DFIG-based wind farm equipped with distributed energy storage systems. Int J Electr Power Energy Syst 113:154–163
Kasem AH, El-Saadany EF, El-Tamaly HH, Wahab MAA (2008) An improved fault ride-through strategy for doubly fed induction generator-based wind turbines. IET Renew Power Gener 2(4):201–214
Krause PC (2002) Analysis of electric machinery, 2nd edn. McGraw-Hill, New York
Liang J, Harley RG (2011) Feed-forward transient compensation control for DFIG wind generators during both balanced and unbalanced grid disturbances. In: IEEE energy conversion congress and exposition (ECCE), pp 2389–2396
Liang J, Qiao W, Harley RG (2010) Feed-forward transient current control for low-voltage ride-through enhancement of DFIG wind turbines. IEEE Trans Energy Convers 25(3):836–843
Mirzakhani A, Ghandehari R, Davari SA (2019) Modeling and dynamic response of double-feed induction generator and back-to-back converters in unbalanced grid voltage conditions. Wind Eng. https://doi.org/10.1177/0309524X19849857
Mohammadi J, Afsharnia S, Vaez-Zadeh S (2014) Efficient fault-ride-through control strategy of DFIG-based wind turbines during the grid faults. Energy Convers Manag 78:88–95
Mohammadi J, Afsharnia S, Vaez-Zadeh S, Farhangi S (2016) Improved fault ride through strategy for doubly fed induction generator based wind turbines under both symmetrical and asymmetrical grid faults. IET Renew Power Gener 10(8):1114–1122
Mohseni M, Islam SM (2012) Transient control of DFIG-based wind power plants in compliance with the Australian grid code. IEEE Trans Power Electron 27(6):2813–2824
Rahimi M, Azizi A (2019) Transient behavior representation, contribution to fault current assessment, and transient response improvement in DFIG-based wind turbines assisted with crowbar hardware. Int Trans Electr Energy Syst 29(1):e2698
Rahimi M, Parniani M (2010) Efficient control scheme of wind turbines with doubly fed induction generators for low-voltage ride-through capability enhancement. IET Renew Power Gener 4(3):242–252
Rahimi M, Parniani M (2014) Low voltage ride-through capability improvement of DFIG-based wind turbines under unbalanced voltage dips. Int J Electr Power Energy Syst 60:82–95
Rashad A, Kamel S, Jurado F, Abdel-Nasser M, Mahmoud K (2019) ANN-based STATCOM tuning for performance enhancement of combined wind farms. Electr Power Compon Syst 47:1–17
Rezaie H, Kazemi-Rahbar MH (2019) Enhancing voltage stability and LVRT capability of a wind-integrated power system using a fuzzy-based SVC. Eng Sci Technol Int J 22(3):827–839
Sitharthan R, Sundarabalan CK, Devabalaji KR, Nataraj SK, Karthikeyan M (2018) Improved fault ride through capability of DFIG-wind turbines using customized dynamic voltage restorer. Sustain Cities Soc 39:114–125
Slootweg JG, Polinder H, Kling WL (2011) Dynamic modelling of a wind turbine with doubly fed induction generator. In: IEEE power engineering society summer meeting, pp 644–649
Wu F, Zhang XP, Godfrey K, Ju P (2007) Small signal stability analysis and optimal control of a wind turbine with doubly fed induction generator. IET Gener Transm Distrib 1(5):751–760
Xiao S, Yang G, Zhou H, Geng H (2013) An LVRT control strategy based on flux linkage tracking for DFIG-based WECS. IEEE Trans Ind Electron 60(7):2820–2832
Yang L, Xu Z, Ostergaard J, Dong ZY, Wong KP (2012) Advanced control strategy of DFIG wind turbines for power system fault ride through. IEEE Trans Power Syst 27(2):713–722
Yao J, Li H, Chen Z, Xia X, Chen X, Li Q, Liao Y (2013) Enhanced control of a DFIG-based wind-power generation system with series grid-side converter under unbalanced grid voltage conditions. IEEE Trans Power Electron 28(7):3167–3181
Zheng Z-X et al (2019) A low voltage ride through scheme for DFIG-based wind farm with SFCL and RSC control. IEEE Trans Appl Supercond 29(2):1–5
Zhou D, Blaabjerg F (2018) Optimized demagnetizing control of DFIG power converter for reduced thermal stress during symmetrical grid fault. IEEE Trans Power Electron 33(12):10326–10340
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Döşoğlu, M.K. Enhancement of Dynamic Modeling for LVRT Capability in DFIG-Based Wind Turbines. Iran J Sci Technol Trans Electr Eng 44, 1345–1356 (2020). https://doi.org/10.1007/s40998-020-00313-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40998-020-00313-9