
Abstract
Structural optimization based on the shakedown theory is a powerful and promising technique. However, due to the nonlinearities of physical materials and the number of variable loads in real structures, it is computationally complex and time-consuming. To simplify the occurring non-linear, non-convex optimization problems, the paper suggests reducing the number of yield conditions. The so-called a yield criterion of the mean (integral yield condition) is analysed and explained in detail, which allows taking into account one yield condition for the entire finite element instead of multiple point-wise conditions. This approach shows promising results in numerical application to the optimization of a circular plate, considering a possibility of employing the yield criteria of the mean or pointwise yield conditions in different areas of the plate in particular. The methods applied are based on the assumptions of perfect plasticity and small deformations.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The shakedown theory of discrete structures and its practical aspects have been widely discussed (Koiter 1960; Maier 1969; Atkočiūnas et al. 1981; Čyras 1983; König 1987; Hung and Morelle 1990; Polizzotto et al. 1991; Stein et al. 1993; Mróz et al. 1995; Franco and Ponter 1997a; Franco and Ponter 1997b; Weichert and Maier 2000; Staat and Heitzer 2002; Weichert and Maier 2002; Chinh 2003; Bousshine et al. 2003; Chen et al. 2008; Weichert and Ponter 2009; Tran 2011; Zhou et al. 2012). Also, works dealing with the issues of optimizing elastic-plastic structures at shakedown should be emphasized (Kaliszky and Lógó 1997; Capsoni and Corradi 1999; Tin-Loi 2000; Kaliszky and Lógó 2002; Casciaro and Garcea 2002; Atkociunas et al. 2004; Giambanco et al. 2004; Merkevičiūtė and Atkočiūnas 2006; Simon and Weichert 2011; Atkočiūnas 2012; Lellep and Polikarpus 2012; Simon et al. 2013; Palizzolo et al. 2014; Blaževičius and Atkočiūnas 2015a). Thus, scientific literature and problem solving experience assist in noticing that structural optimization based on the shakedown theory is a powerful and promising technique; however, due to the nonlinearities of physical materials and the number of variable loads in real structures, it appears to be computationally complex and time-consuming. Therefore, the paper properly examines the case of a circular plate at shakedown thus defining the goal of the article. With reference to the Melan’s theorem, (Koiter 1960; König 1984), equilibrium finite elements can be successfully applied (Belytschko 1972; Gallagher 1975; Venskus et al. 2010; Blaževičius et al. 2014) to shakedown analysis. Figure 1 shows the discretization of the circular plate using the above introduced elements and the circular finite element itself having three nodes (1 and 3—the principle nodes of the element).

A symmetric circular plate and a circular finite element having three nodes
Current paper investigates thin circular and annular plates (thin means that thickness is no more than 1/5 of the smallest plate dimension, e.g., radius R). Elastic calculations of thin plates are based on the Kirchhoff-Love hypothesis (Gustav Robert Kirchhoff, 1824–1887; A.E.H. Love, 1863–1940). Additionally it is assumed that any point of the middle plate plane displaces only in the vertical direction, which, together with the assumption of small deformations, means that the middle plane is not stressed axially. These assumptions are valid for the plastic analysis of the plates as well.
In case of the discrete model of the structure, under m degrees of freedom, variable-repeated load F (t) acts as the system of external forces F (t) = [F 1(t) F 2(t) … F m (t)] T, each of which, in time t, varies independently from one other. It is clear that some components of vector F (t) may have constant zero values, and therefore such forces should be eliminated from further calculations. The work accepts that only upper F sup and lower F inf ranges of a variation of fluctuations in external forces can be predicted: F inf ≤ F(t) ≤ F sup . The pronounced effect of external forces, i.e., particular histories of variations in forces within these bounds are not examined (the unloading phenomenon of cross-sections is also ignored in the course of plastic deformation). Load vectors are formed by the combinations of the upper and lower bounds of external forces F j , j = 1, 2, … p; p = 2m, j ∈ J (F inf ≤ F j ≤ F sup ).
The stress state of a discrete circular plate is expressed by the vector of forces \( \mathbf{M}={\left[\begin{array}{ccc}\hfill \begin{array}{cc}\hfill {\mathbf{M}}_1\hfill & \hfill {\mathbf{M}}_2\hfill \end{array}\hfill & \hfill \dots \hfill & \hfill {\mathbf{M}}_{\zeta}\hfill \end{array}\right]}^T \), ζ = s × v, where s is the number of finite elements (k = 1, 2, …, s, k ∈ K) and ν is the number of the nodes (design sections) of each element (circular plate ν = 3, Fig. 1). Thus, overall, there are ζ design sections: i = 1, 2, …, ζ, i ∈ I.
The yield stress f y of the examined steel plates remains constant in the whole plate. Meanwhile, the thickness t k of finite element k is constant only within the bounds of the element (area of the element is marked L k , k ∈ K). Thus, the limiting bending moment is assumed to be constant per finite element area, i.e., M 0, 1, M 0, 2 and M 0, 3 of all three nodes are the same and simply equal to M 0, k . Radial M ρ and circular M θ bending moments describe the stress state of the circular plate. Traditionally, von Mises nonlinear yield condition will be verified in all nodal points of the plate i = 1, 2, …, ζ, i ∈ I (the so-called pointwise yield conditions):
where von Mises yield matrix is 
Thus, the disclosed form of the (1) is:
It is convenient to pick out residual bending moments M r , displacements u r and strains Θ r = D M r + Θ p when analysing a plate at shakedown. If j = 1, 2, … p (j ∈ J) vertices of elastic force F(t) locus exist, then, the combinations of elastic bending moments M e and displacements u e are determined by equations M ej = α F j and u ej = β F j , where α and β are influence matrices of elastic response. While omitting detailed investigation into the loading history, yield conditions take the form
This indicates that the abundance of yield conditions (3) enormously expands the scope of the shakedown analysis problem when the structure is under the effect of multidimensional loading. To simplify such non-linear optimization problems, the current paper suggests reducing the number of yield conditions. The so-called yield criterion of the mean (sometimes called integral yield condition) is analysed and explained in detail (Blaževičius and Atkočiūnas 2015b). The general mathematical model (Atkočiūnas et al. 2015) of the optimal design problem for perfectly elastic-plastic structures exposed to repeated alternating loading has been developed by the authors of the article and applied to the elastic-plastic circular plates at shakedown employing the yield criterion of the mean. The idea of the yield conditions of the mean were introduced a long time ago (Nguyen Dang Hung and König 1976; Kačianauskas and Čyras 1988; Atkočiūnas et al. 1994) but did not attract the interest of researchers working on optimal shakedown design. The authors of this paper find this condition promising in the sense it can reduce the number of conditions for mathematical programing problems thus simplifying shakedown ones. The present paper compares solutions using pointwise and mean yield conditions for circular plate optimization problems. The task is to find how these conditions affect a particular design project and to compare the efficiency of numerical calculations, which is the main goal of the article. All calculations have been made using Matlab software package. Numerical experiments are based on the assumption of small displacements.
2 The main discrete dependencies of the symmetric circular plate
A discrete model of a circular symmetric plate is made of equilibrium finite elements having three calculated nodes each (Figs. 1 and 2). As mentioned in the introductory part of the paper, there are ζ number of calculated nodes, which makes i = 1, 2, …, ζ, i ∈ I. However, for deriving dependencies of the element, referring to index k is a more appropriate option. At a later stage, pointwise yield conditions will be verified in every node i, and conditions of the mean—in every element k; therefore, distinguishing between these two is an important task. Figure 2 shows positive internal forces acting in the element. The article examines symmetric plates in terms of geometry, boundary conditions and loading. Thus, when the symmetry axis of the plate is taken as the starting point of the polar coordinate system, a single radius of the plate is enough for examination due to the fact that internal forces and displacements do not depend on the angular coordinate.

A finite element of a circular symmetric plate and its positive internal forces. Relation between global and local coordinates
Two bending moments (radial M ρ,k (ρ) and tangential M θ,k (ρ)) that depend on the coordinate p of the radius are sufficient to consider the symmetric plate. Bending moments M k (ρ) are expressed in nodal moments M k applying approximation matrix H k (ρ) at any point of element k:
Vector M k of the nodal bending moments of every finite element k is made of six components (Fig. 2): \( {\mathbf{M}}_k={\left[\begin{array}{cccccc}\hfill {M}_{\rho, k,1}\hfill & \hfill {M}_{\theta, k,1}\hfill & \hfill {M}_{\rho, k,2}\hfill & \hfill {M}_{\theta, k,2}\hfill & \hfill {M}_{\rho, k,3}\hfill & \hfill {M}_{\theta, k,3}\hfill \end{array}\right]}^T \), and therefore the approximation matrix of internal forces H k (ρ) in global coordinates is expressed as follows:
where coefficients A 1, A 2, A 3 are
The correlation between global ρ k and local ξ k coordinates (Fig. 2) can be expressed as
where ρ k,2 is the coordinate of the second (median) node of the element; b k is a half of the width of the finite element. The approximation matrix of the bending moments of local coordinates is received changing the above mentioned coordinates:

Then, the nodal internal forces of the element at any local point ξ are
If the degree of freedom of the structure is m, then, the vectors of global displacements and external loads are \( \mathbf{u}={\left[\begin{array}{ccc}\hfill \begin{array}{cc}\hfill {u}_1\hfill & \hfill {u}_2\hfill \end{array}\hfill & \hfill \dots \hfill & \hfill {u}_m\hfill \end{array}\right]}^{\;T} \) and \( \mathbf{F}={\left[\begin{array}{ccc}\hfill \begin{array}{cc}\hfill {F}_1\hfill & \hfill {F}_2\hfill \end{array}\hfill & \hfill \dots \hfill & \hfill {F}_m\hfill \end{array}\right]}^{\;T} \) respectively. Finally, taking into account boundary conditions, the following equilibrium equations for the discrete model of the circular plate at shakedown are received:
where A(m × n) is the matrix of the coefficients of equilibrium equations for the discrete model of the plate. The state of structural deformations is expressed in nodal displacements u and deformations of elements \( \boldsymbol{\Theta} ={\left[\begin{array}{ccc}\hfill \begin{array}{cc}\hfill {\varTheta}_1\hfill & \hfill {\varTheta}_2\hfill \end{array}\hfill & \hfill \dots \hfill & \hfill {\varTheta}_{\zeta}\hfill \end{array}\right]}^T \): Θ = DM. Then, geometrical equations for the discrete model of the elastic plate are as follows:
where D = diag[D k ] is the quasi-diagonal matrix of element flexibility (n × n). The flexibility matrix of every k-th element is expressed by the formula
where d k is the flexibility of an infinitesimal element:
ν k is Poisson’s ratio, K k —flexural rigidity of the plate element (Kączkowski 1980; Szilard 2004).The replacement of global coordinates for the local ones ρ(ξ) = ρ 2 + ξ ⋅ b k , ρ′(ξ) = b k , allows re-writing the expression (11):
The disclosed matrix D k is as follows:

Bending moments M ej = αF j and displacements u ej = βF j of the elastic plate for every combination j ∈ J can be calculated using the influential matrices of internal forces α and displacements β:
Residual bending moments of the state of the structure at shakedown M r are self-equilibrium:
Kinematically admissible residual displacements u r must satisfy geometrical equations:
where residual deformations Θ r = DM r + Θ p and the vector of plastic deformations \( {\boldsymbol{\Theta}}_p={\left[\begin{array}{cccc}\hfill {\boldsymbol{\Theta}}_{p1}\hfill & \hfill {\boldsymbol{\Theta}}_{p2}\hfill & \hfill \dots \hfill & \hfill {\boldsymbol{\Theta}}_{p\zeta}\hfill \end{array}\right]}^T \). For each cross-section, Θ pi is equal to
where λ i,j ≥ 0 are plastic multipliers. Residual deformations and displacements, similarly to the case of bar structures, are not the only aspects at shakedown: they also depend on the history of loading F (t), however, their variation bounds can be defined (Merkevičiūtė and Atkočiūnas 2006).
3 Complete set of equations for the shakedown analysis problem of the plate
The analysis problem defines the determination of the shakedown stress-strain state of the plate when physical parameters t k , f y and variable repeated loading F inf ≤ F(t) ≤ F sup are known in advance. The problem of static formulation represents the principle of minimum complementary energy: from all statically admissible vectors of plate residual bending moments M r , the actual one corresponds to the minimum of complementary deformation energy of the structure at shakedown. The mathematical model of the problem stated on the basis of the above-mentioned principle is
subject to
Total moments M j = M r + M ej in the mathematical model of the shakedown analysis problem (17)–(19), under predetermined M ej , are calculated taking into account each combination of loadings j ∈ J. The optimal solution to the problem (17)–(19) consists of residual bending moments M ∗ r that ensure the state of shakedown and a possibility of determining sections where plastic deformations Θ p appear. Block-diagonal matrix Π(n × n) consists of blocks Π i . Operator Γ(M T j ) arranges the components of vector M T j in such a way that yield conditions (19) would be verified in every section i of the discrete model j = 1, 2, … p times in total. Thus, vector φ j is the vector of the values of yield conditions for an entire structure considering one combination j of loading.
The constraints (18)–(19) of the problem (17)–(19) along with Kuhn-Tucker conditions constitute the complete system of equations defining the stress-strain state of the plate at shakedown (Euler-Lagrange equations):
The components of vector λ T j under conditions (22) are arrayed so that plastic deformations in every section i would be obtained according to (16): \( {\boldsymbol{\Theta}}_{pi}=2\;{\displaystyle \sum_j{\lambda}_{i,j}\;{\boldsymbol{\Pi}}_i{\mathbf{M}}_{i,j}} \), i ∈ I, j ∈ J. Recall that Kuhn-Tucker conditions state that solution M ∗ r is global if multipliers λ j ≥ 0 (j ∈ J) and displacements u r , satisfying conditions (22)–(24), exist (Atkočiūnas et al. 2015).
4 Mathematical models for the optimization problem of the plate at shakedown
The problem of determining the distribution of optimal limiting bending moment M 0 = [M 01 M 02 … M 0s ] T is relevant in practical design. The optimal shakedown design problem of the circular plate is formulated as follows: for the given load, variation bounds F sup , F inf , the vector of limiting forces M 0 , satisfying optimality criterion min ℱ (M 0) and the constraints of shakedown and stiffness should be found. A general mathematical model of plate optimization, in case of pointwise yield conditions, is as follows:
subject to
The objective function (25) min ℱ (M 0) can express the optimal distribution of limiting forces (e.g., min L T M 0, where L is a vector of the areas of the element or an optimal volume of structure min L T t where t is a vector of the thickness of the element). It is a continuous optimization problem where unknowns include M 0, M r , u r , λ j . The multi-extremity of the problem is determined by complementary slackness conditions for mathematical programing (29). According to Eurocode requirements, the ultimate limit state is secured by (27) and serviceability limit state—by (31). A shortcoming of the model (25)–(31) is the incapability to determine the unloading phenomenon, i.e., a vector of residual displacements u r , determined by the non-monotonic process of plastic deformations in the shakedown state, which may be non-unique.
The elimination of geometrical (28) results in the transformed problem of defining the distribution of optimal limiting bending moments of the plate at shakedown:
subject to
where A (1)T is a sub-matrix of geometric matrix \( {\mathbf{A}}^T={\left[\begin{array}{cc}\hfill {\mathbf{A}}^{(1)}\hfill & \hfill {\mathbf{A}}^{(2)}\hfill \end{array}\right]}^T \) that has an inverse matrix (corresponds to the sub-matrix D (1) of flexibility matrix D and to sub-vector Θ (1) p ; the selection method of lines for sub-matrix A (1)T is based only on the existence of its inverse matrix) (Blaževičius et al. 2014). The unknowns of problem (32)–(38) include M 0, M r , λ j . The structure of the vector of plastic deformations \( {\boldsymbol{\Theta}}_p=2\;{\displaystyle \sum_j\boldsymbol{\Pi} \kern0.1em {\boldsymbol{\Gamma}}^T{\left({\mathbf{M}}_r+{\mathbf{M}}_{ej}\;\right)}^T{\boldsymbol{\uplambda}}_j} \) is as follows: \( {\boldsymbol{\Theta}}_p={\left[{\boldsymbol{\Theta}}_p^{(1)}{\boldsymbol{\Theta}}_p^{(2)}\right]}^T={\left[{\boldsymbol{\Theta}}_{p1}{\boldsymbol{\Theta}}_{p2}\dots {\boldsymbol{\Theta}}_{pn}\right]}^T \).
5 Von Mises yield criterion of the mean for the circular plate
When limiting bending moment M 0k is assumed to be constant per finite element area, von Mises yield criterion for point i = 1, 2, 3 (1) of the element of the circular symmetric plate can be expressed in a form of the matrix in the following way:
Integrating both sides of inequality (39) over the width of the element gives the yield condition of the mean (or the so-called integral yield condition):
Changing variable ρ(ξ) = ρ 2 + ξ ⋅ b k , ρ′(ξ) = b k gives
Introducing \( {\boldsymbol{\Phi}}_k=\frac{1}{2}{\displaystyle \underset{-1}{\overset{1}{\int }}{\left[{\mathbf{H}}_k\left(\xi \right)\right]}^T{\boldsymbol{\Pi}}_i\left[{\mathbf{H}}_k\left(\xi \right)\right]\kern1em d\xi } \) simplifies the inequality to
The matrix of the yield criterion of mean Φ k has a constant numerical expression:

Then, the yield condition of the mean for element k can be written as follows:

Such a formulation of the yield criterion reduces the number of yield conditions: only one mean condition instead of three (39) pointwise conditions for the element is verified. Thus, the scope of the mathematical programming problem decreases, which is a relevant point in making real structures at shakedown optimal, discretized by a high number of finite elements and affected by multidimensional loading spaces.
6 Verification of yield conditions conducting numerical experiments on the plate
6.1 Plate optimization under cyclic-plastic collapse
While ignoring limits (28)–(31) in the mathematical model for the optimization problem of the plate at shakedown (25)–(31), the optimization problem of the limiting bending moments of the circular bending plate is received considering cyclic-plastic collapse conditions:
subject to
Problem (42)–(45) contains pointwise yield conditions where unknowns are the vectors of limiting M 0 and residual moments M r . Under the examination of the cyclic-plastic collapse of the plate in the case of mean yield conditions, inequalities (44) are replaced with
where M k,j = (M rk + M ek,j ) are the vectors of the total moments of the finite element.
Numerical experiment 1 examines a symmetric annular hinge supported plate (R = 0.9 m, opening diameter ∅ = 0.3 m) (Fig. 3). The plate is affected by a symmetric evenly distributed load varying within the range of − 75 kN/m2 ≤ q(t) ≤ 150 kN/m2. The elasticity module of the plate material is E = 210 GPa, yield stress– f y = 210 MPa (physical model of the perfectly elastic-plastic material is applied), Poisson’s ratio ν = 1/3. The discrete model of the plate is made of six equilibrium finite elements: k = 1, 2, …, 6. Initial thicknesses of all elements are t k = 0.03 m, which results in 0.0134 m maximum elastic deflection if q = 150 kN/m2.

A discrete model of a symmetric annular plate
The problem of the optimal distribution of the limiting moments of the plate (42)–(45) is solved within the process of cyclic-plastic collapse when all finite elements apply to pointwise (44) or mean (46) von Mises yield criteria.
Each of optimization problems is solved in an iterative way, because the results of calculating the elasticity of the plate are used in yield conditions and depend on the thickness of the elements of plate t k . However, optimal solutions to both problems converge rather fast as 5 iterations are enough for reaching convergence (the results of the achieved solution are shown in Table 1). According to the received limiting moments M 0, k the thickness t k of the finite elements of the discrete model for the plate can be calculated because M 0,k = f y t 2 k /4.
Real problem solving time required for an average PC to deal with the problem through 5 iterations is shown in the last column of Table 1. The presented results demonstrate that the problem having the yield criterion of the mean was solved 32 % faster. The function value of the purpose of this problem is slightly lower than that of the problem having pointwise yield conditions; nevertheless, the received distributions of bending moments are very similar in both cases of yield conditions (Fig. 4 shows the detailed results of bending moments M q = 150 = M e,q = 150 + M r ). It should be noted that equilibrium finite elements allow for jumps of tangential (M θ ) bending moments at the joints of neighbouring elements, but ensures the equilibrium between radial moments (M ρ ) at every point.

Total bending moment diagrams of the plate (M q = 150 = M e,q = 150 + M r )
Thus, with reference to numerical experiment 1, the application of the yield criterion of the mean seems to be reasonable due to the fact that calculation time is significantly reduced, and the accuracy of the obtained results is fully adequate.
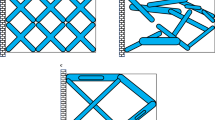
Numerical experiment 2 examines a symmetric annular hinge supported plate (Fig. 5a). Plate is loaded with an evenly distributed symmetric load q(t) varying within the range of − 95 kN/m2 ≤ q(t) ≤ 100 kN/m2 and a constant distributed externally shaped bending moment M = 36.25 kN/m. The elasticity modulus of the plate material is E = 210 GPa, yield stress - f y = 210 MPa, Poisson’s ratio ν = 1/3. The discrete model is made of six equilibrium finite elements. Initial thicknesses of all six elements are t k = 0.03 m.

a A discrete model of the circular plate; (b) symmetric diagrams of the total bending moments (kN) when active loads are q = − 95 kN/m2 (upwards) and M = 36.25 kN/m
The problem of the optimal distribution of the limiting moments of the plate (42)–(45) is solved within the process of cyclic-plastic collapse considering three cases of creating yield conditions:
-
applying pointwise von Mises yield conditions (44) to all nodes of structural elements;
-
applying yield criteria of the mean (46) to all six elements of the plate,
-
under mixed yield conditions (pointwise yield conditions for the elements No 1, 2, and 6, and yield conditions of the mean for the elements No 3, 4, and 5).
The obtained results—limiting bending moments and corresponding thicknesses—are summarized in Table 2. Detailed results of the bending moments can be found in Table 3, where elastic bending moments M θ,e2 and M ρ,e2 are due to load combination when q = 100 kN/m2 and M = 36.25 kN/m are acting together. The total bending moments are the sum of elastic and residual parts: M θ = M θ,e2 + M θ,r and M ρ = M ρ,e2 + M ρ,r .
Due to the fact that only the radius (it’s enough because of a symmetric plate) of the plate is investigated, difficulties in assessing conditions for the symmetry of the centre of the plate are encountered in equilibrium equations. Thus, using the yield criterion of the mean for the first element is not quite correct and therefore mixed yield conditions are applied. Mixed conditions combine pointwise yield conditions at the symmetry point, supports and (if any) concentrated load positions and mean conditions elsewhere.
An in-depth examination of optimization results (Table 2) allows making a conclusion that the application of the yield criterion of the mean results in almost an identical value of the objective function (differs 0,6 %). Under mixed yield conditions, the objective function value completely approaches to the case of the pointwise conditions (less by 0,3 % than pointwise). The authors suggest applying pointwise yield conditions in the nodes of the elements where stress concentration or complex boundary conditions (including symmetry conditions) are observed while under a constant state of stresses—yield criteria of the mean are recommended. The calculation of elastic bending moments in any case is performed considering all three nodes of the element, and therefore such a twofold recording of yield conditions do not cause difficulties in the practical application of the mathematical programming problem. On the other hand, this allows reducing the number of nonlinear yield conditions in the problem thus simplifying the solution. The results in Fig. 5b show that mixed yield conditions ensure the sufficient accuracy of the obtained results.
6.2 Optimization of the plate at shakedown under displacement limits
Numerical experiment 3 examines an annular hinge supported plate (Fig. 5a) identically loaded as the one presented in numerical experiment 2. However, in this particular case, a total (elastic plus plastic) vertical displacement of the middle point of the plate (first node of the first element) will be limited to − 0.03 m ≤ u r,1 + u ej,1 ≤ 0.03 m. Initial thicknesses of all six elements are t k = 0.03 m, which results in −0.013 m or +0.028 m elastic deflection if load is M = 36.25 kN/m and q = 100 kN/m2 or M = 36.25 kN/m and q = − 95 kN/m2 accordingly.
The optimal distribution problem of the limiting moments of the plate at shakedown (32)–(38) is solved assessing displacement limits. For the elements of the plate, von Mises yield criteria of the mean (46) are applied, whereas the obtained results of solving the optimization problem will be compared with the findings referring to pointwise yield conditions published in the previous work of the authors of this article (Blaževičius et al. 2014).
Continuous optimization has been used, and therefore the process of reaching a solution to the mathematical programming problem (32)–(38) is illustrated by the results of individual iterations shown in Fig. 6. Table 4 displays limiting bending moments of the finite elements received accordingly to optimal solution min L T M 0 = 116.773 kNm2 that is supposed to be reached when the results of adjacent iterations differ in the expected precision (Venskus et al. 2010). Figure 7 shows the obtained optimal thickness of the cross-section of the plate elements (corresponding to limiting moments presented in Table 4).

The convergence of the objective function

The graphical representation of optimization results
7 Conclusions
-
1.
In the cases of creating pointwise yield conditions and yield criteria of the mean for the circular bending plate at shakedown, the internal forces of elastic calculation are estimated identically, i.e., taking into account all nodal points of the finite elements of the discrete model for the plate. For that purpose, precise analytical formulae for plates or the findings of equilibrium finite elements of the elastic plate can be considered.
-
2.
The nodes containing stress concentration or complex boundary conditions (in some cases, symmetry conditions) are recommended to refer to pointwise yield conditions, whereas the area of the continuous distribution of internal forces is suggested yield criteria of the mean. In that case, mixed yield conditions ensure the sufficient precision of the obtained results under both the cyclic-plastic collapse of the plate and its state of shakedown.
-
3.
Yield criteria of the mean do not disturb the convergation processes of solutions to the optimization problems of circular bending plates at shakedown. They can be successfully applied to the structures of a similar type.
References
Atkočiūnas J (2012) Optimal shakedown design of elastic–plastic structures. Vilnius Gediminas Technical University, Vilnius, Lithuania, 300 p. doi:10.3846/1240-S
Atkočiūnas J, Borkowski A, König JA (1981) Improved bounds for displacements at shakedown. Comput Methods Appl Mech Eng 28:365–376. doi:10.1016/0045-7825(81)90007-4
Atkočiūnas J, Kalanta S, Čirba S (1994) Integral yield conditions of an equilibrium finite element. In: Lithuanian computational mechanics seminar III (in Lithuanian). pp 7–10
Atkociunas J, Jarmolajeva E, Merkeviciute D (2004) Optimal shakedown loading for circular plates. Struct Multidiscip Optim 27:178–188. doi:10.1007/s00158-003-0308-5
Atkočiūnas J, Ulitinas T, Kalanta S, Blaževičius G (2015) An extended shakedown theory on an elastic–plastic spherical shell. Eng Struct 101:352–363. doi:10.1016/j.engstruct.2015.07.021
Belytschko T (1972) Plane stress shakedown analysis by finite elements. Int J Mech Sci 14:619–625. doi:10.1016/0020-7403(72)90061-6
Blaževičius G, Atkočiūnas J (2015a) Optimal shakedown design of steel framed structures according to standards. Ann Solid Struct Mech. doi:10.1007/s12356-015-0039-5
Blaževičius G, Atkočiūnas J (2015b) Optimal shakedown design of circular plates using a yield criterion of the mean. In: Mechanika’2015: proceedings of the 20th international scientific conference. Kaunas, Lithuania, pp 61–66
Blaževičius G, Rimkus L, Atkočiūnas J (2014) An improved method for optimal shakedown design of circular plates. Mechanika 20:390–394. doi:10.5755/j01.mech.20.4.6542
Bousshine L, Chaaba A, De Saxce G (2003) A new approach to shakedown analysis for non-standard elastoplastic material by the bipotential. Int J Plast 19:583–598. doi:10.1016/S0749-6419(01)00070-5
Capsoni A, Corradi L (1999) Limit analysis of plates-a finite element formulation. Struct Eng Mech 8:325–341. doi:10.12989/sem.1999.8.4.325
Casciaro R, Garcea G (2002) An iterative method for shakedown analysis. Comput Methods Appl Mech Eng 191:5761–5792. doi:10.1016/S0045-7825(02)00496-6
Chen S, Liu Y, Cen Z (2008) Lower bound shakedown analysis by using the element free Galerkin method and non-linear programming. Comput Methods Appl Mech Eng 197:3911–3921. doi:10.1016/j.cma.2008.03.009
Chinh PD (2003) Plastic collapse of a circular plate under cyclic loads. Int J Plast 19:547–559. doi:10.1016/S0749-6419(01)00078-X
Čyras A (1983) Mathematical models for the analysis and optimization of elastoplastic structures. Ellis Horwood, Chichester, 121 p
Franco JRQ, Ponter ARS (1997a) A general approximate technique for the finite element shakedown and limit analysis of axisymmetrical shells. Part 1: theory and fundamental relations. Int J Numer Methods Eng 40:3495–3513. doi:10.1002/(SICI)1097-0207(19971015)40:19<3495::AID-NME222>3.0.CO;2-U
Franco JRQ, Ponter ARS (1997b) A general approximate technique for the finite element shakedown and limit analysis of axisymmetrical shells. Part 2: numerical applications. Int J Numer Methods Eng 40:3515–3536. doi:10.1002/(SICI)1097-0207(19971015)40:19<3515::AID-NME223>3.0.CO;2-W
Gallagher RH (1975) Finite element analysis: fundamentals. Int J Numer Methods Eng 9:732. doi:10.1002/nme.1620090322
Giambanco F, Palizzolo L, Caffarelli A (2004) Computational procedures for plastic shakedown design of structures. Struct Multidiscip Optim 28:317–329. doi:10.1007/s00158-004-0402-3
Hung ND, König JA (1976) A finite element formulation for shakedown problems using a yield criterion of the mean. Comput Methods Appl Mech Eng 8:179–192
Hung ND, Morelle P (1990) Optimal plastic design and the development of practical software. In: Mathematical programming methods in structural plasticity. Springer Vienna, Vienna, pp 207–229
Kačianauskas R, Čyras A (1988) The integral yield criterion of finite elements and its application to limit analysis and optimization problems of thin-walled elastic–plastic structures. Comput Methods Appl Mech Eng 67:131–147. doi:10.1016/0045-7825(88)90121-1
Kączkowski Z (1980) Plyty obliczenia statyczne (Plates, Statical analysis) (in Polish), 2nd edn. Arkady, Warsaw, 467 p
Kaliszky S, Lógó J (1997) Optimal plastic limit and shake-down design of bar structures with constraints on plastic deformation. Eng Struct 19:19–27. doi:10.1016/S0141-0296(96)00066-1
Kaliszky S, Lógó J (2002) Layout and shape optimization of elastoplastic disks with bounds on deformation and displacement. Mech Struct Mach 30:177–192. doi:10.1081/SME-120003014
Koiter WT (1960) General theorems of elastic–plastic solids. In: Sneddon JN, Hill R (eds) Progress in solid mechanics. North-Holland, Amsterdam, pp 165–221
König JA (1984) Stability of the incremental collapse. In: Polizzotto C, Sawczuk A (eds) Inelastic structures under variable loads. Cogras, Palermo, pp 329–344
König JA (1987) Shakedown of elastic–plastic structures. Elsevier Science Ltd., Warsaw. doi:10.1016/B978-0-444-98979-6.50018-9, 224 p
Lellep J, Polikarpus J (2012) Optimal design of circular plates with internal supports. WSEAS Trans Math 11:222–232
Maier G (1969) Shakedown theory in perfect elastoplasticity with associated and nonassociated flow-laws: a finite element, linear programming approach. Meccanica 4:250–260. doi:10.1007/BF02133439
Merkevičiūtė D, Atkočiūnas J (2006) Optimal shakedown design of metal structures under stiffness and stability constraints. J Constr Steel Res 62:1270–1275. doi:10.1016/j.jcsr.2006.04.020
Mróz Z, Weichert D, Dorosz S (eds) (1995) Inelastic behaviour of structures under variable loads. Springer Netherlands, Dordrecht. doi:10.1007/978-94-011-0271-1, 502 p
Palizzolo L, Caffarelli A, Tabbuso P (2014) Minimum volume design of structures with constraints on ductility and stability. Eng Struct 68:47–56. doi:10.1016/j.engstruct.2014.02.025
Polizzotto C, Borino G, Caddemi S, Fuschi P (1991) Shakedown problems for material models with internal variables. Eur J Mech A-Solid 10:621–639
Simon J, Weichert D (2011) Shakedown analysis with multidimensional loading spaces. Comput Mech 49:477–485. doi:10.1007/s00466-011-0656-8
Simon J-W, Kreimeier M, Weichert D (2013) A selective strategy for shakedown analysis of engineering structures. Int J Numer Methods Eng 94:985–1014. doi:10.1002/nme.4476
Staat M, Heitzer M (eds) (2003) Numerical methods for limit and shakedown analysis - deterministic and probabilistic problems. NIC Series, vol. 15. John von Neumann Institute for Computing, Jülich, pp 282
Stein E, Zhang G, Mahnken R (1993) Shakedown analysis for perfectly plastic and kinematic hardening materials. In: CISM. Progress in computernal analysis or inelastic structures. Springer Verlag, Wien, pp 175–244
Szilard R (2004) Theories and applications of plate analysis: classical, numerical and engineering methods. John Wiley & Sons, New Jersey, 1056 p
Tin-Loi F (2000) Optimum shakedown design under residual displacement constraints. Struct Multidiscip Optim 19:130–139. doi:10.1007/s001580050093
Tran TN (2011) A dual algorithm for shakedown analysis of plate bending. Int J Numer Methods Eng 86:862–875. doi:10.1002/nme.3081
Venskus A, Kalanta S, Atkočiūnas J, Ulitinas T (2010) Integrated load optimization of elastic–plastic axisymmetric plates at shakedown. J Civ Eng Manag 16:203–208. doi:10.3846/jcem.2010.22
Weichert D, Maier G (eds) (2000) Inelastic analysis of structures under variable loads. Springer Netherlands, Dordrecht. doi:10.1007/978-94-010-9421-4, 396 p
Weichert D, Maier G (eds) (2002) Inelastic behaviour of structures under variable repeated loads. Springer Vienna, Vienna. doi:10.1007/978-3-7091-2558-8, 396 p
Weichert D, Ponter A (eds) (2009) Limit states of materials and structures. Springer Netherlands, Dordrecht. doi:10.1007/978-1-4020-9634-1, 305 p
Zhou S, Liu Y, Chen S (2012) Upper bound limit analysis of plates utilizing the C1 natural element method. Comput Mech 50:543–561. doi:10.1007/s00466-012-0688-8
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Blaževičius, G., Rimkus, L., Merkevičūtė, D. et al. Shakedown analysis of circular plates using a yield criterion of the mean. Struct Multidisc Optim 55, 25–36 (2017). https://doi.org/10.1007/s00158-016-1460-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00158-016-1460-z