
Abstract
This article investigates the asymptotic stability of fractional-order (FO) systems with uncertainty and time-varying delay based on the sliding mode control (SMC) method. First, based on the SMC method, a suitable integral type fractional-order sliding mode surface (FOSMS) is designed and the dynamic equations of FO systems under SMC are obtained. Second, by inequality techniques, the condition for asymptotic stability of the FO system has been mathematically established. Then, a novel adaptive SMC law is introduced, which can make sure the accessibility of sliding mode surfaces (SMS). Finally, the feasibility of the results obtained in this paper is verified through a simulation.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
In the 1960s, Italian mathematician Samuel Caputo put forward the concept of fractional calculus. Since then, fractional calculus has been widely used in physics, biology, economics, and other fields. Compared to integer-order systems, fractional-order (FO) systems [12, 18] are extensions of integer-order systems. It has all the characteristics of integer order models and special properties such as historical memory. Meanwhile, with the continuous deepening of research on FO systems, people have found that fractional calculus has a wider range of applications than integer calculus, as it can more accurately describe some complex systems. In [24], the robust fractional derivative estimation for partially unknown FO nonlinear systems under the influence of noise was studied. In [25], a new clustering region was designed to discuss the robustness of FO systems. In [15], through the use of FO control, we can better capture various complex parameters in the system, so that we can better monitor its complex physical behavior. In [9], a new FO function based on fuzzy control was designed to handle multiple position control directions and was suitable for interconnected systems. To reduce the distortion rate of the system, a FO model predictive control strategy with adaptive parameters was proposed in [8]. In [1], based on FO networks, a new stability criterion of LMI was proposed, and a novel feedback controller was formulated to make the FO system stable. Therefore, the study of FO systems is playing a significance role in the field of engineering.
In practical life, time-delay systems appear in various fields, and the time delay is often one of the sources of system instability and oscillation. For FO systems with time delays, some control strategies have been advanced in recent literature to ensure system robustness. In [6], the tracking problem of FO systems with parameter uncertainty was studied, and the finite-time robust stability criterion was obtained. In [13], a variable structure control based on an optimal FO selection strategy was proposed, which can improve the robustness of the system. In [26], based on Lyapunov theory, the global dissipation criterion was obtained for FO neural networks. For the FO delayed neural network in [10], sufficient conditions for two sets of event-triggered synchronization were gained. Unfortunately, some existing research may focus on linear systems [16]. The system studied in this article has time-varying delay and uncertainty, which makes the system more complex and puts higher requirements on controller design.
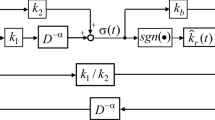
Sliding mode control (SMC) is a powerful robust control technique, which is famous for its anti-interference to external disturbances and parameter uncertainties. Its primary objective is to compel the system to converge to the desired sliding mode surface (SMS). The method of SMC is divided into two steps: the arrival process [19, 32] and the sliding process [11, 20, 28]. It is worth noting that SMC provides several key features, including quick speed response, high-performance, and anti-interference to disturbances. So far, the combination of FO time-delayed systems and SMC method has received widespread attention. In [32], a new SMC strategy was proposed, which can better improve transmission efficiency. In [21], a new controller based on integral SMS was designed to ensure that the generator can still achieve optimal speed despite interference. In [27], a new sensor fault detection technology has been proposed, which can calculate the error of the tracking signal to ensure system performance. In [3], a new integral SMS was raised to make sure the robustness of systems with Markov switching and Lévy noise. In [5], a new SMC strategy was proposed, which can quickly stabilize second-order objects with high accuracy. Therefore, it is significant to conduct comprehensive research on fractional-order sliding mode control (FOSMC). Regrettably, current research on sliding mode controllers is more focused on linear or time-varying systems [7], and there is less research on control problems for FO systems with time-varying delays. Therefore, the work of this article can provide new ideas and methods for the application of SMC in FO systems (see Fig. 1).
Asymptotic stability refers to whether a system can reach equilibrium when time approaches infinity under the action of a controller, which is often studied in many complex systems [2, 29, 31]. Fractional calculus can more accurately describe the behavior of some complex systems, and the introduction of delay terms can also comprehensively study the robustness of FO systems. Therefore, this paper mainly researches SMC for time-varying delays and uncertainty in FO systems. By designing appropriate SMS and SMC laws, FO systems can gradually approach the stable state of the system output after a while.
Based on the above discussion, we have discussed the FO systems with time-varying delays and uncertainties. Unlike existing research results, this paper has four contributions as follows:
-
(1)
For FO systems with time delay and uncertainties, an adaptive SMC law is designed that can automatically adjust control strategies based on the dynamic characteristics of the system to cope with external changes and uncertainties.
-
(2)
A new integral type SMS is introduced for the FO system, which adds an integral term to the SMS. This allows the system state to quickly converge from the initial value to SMS and can to some extent reduce system chattering. In addition, the accessibility of SMS was also analyzed.
-
(3)
\(\text {sgn} (s(t))\) is used instead of the non-continuous function \(\frac{s}{ | s |+ \sigma }\), which can significantly reduce the chattering phenomenon.
-
(4)
Compared to integer-order systems such as [7, 17], the modeling of SMC for FO systems with time delay and uncertainty is more complex, and the controller design process also requires the handling of fractional order operators and uncertainties in the system, which increases the complexity of theoretical proof.

SMC controller design
2 Preliminaries
Consider a fractional-order system with uncertainties
where \(u(t)\in \mathbb {R}^{m} \) represents the control vector. \(\zeta (t)\in \mathbb {R}^{n} \) represents the state vector. \(Z_{} \in \mathbb {R}^{n\times n} \), \(Z_{d} \in \mathbb {R}^{n\times n}\), \(C\in \mathbb {R}^{n\times m} \). \(i(\zeta (t-h(t)),t)\in \mathbb {R} ^{m}\) and \(r(\zeta (t),t)\in \mathbb {R}^{m} \) are unknown nonlinear functions. h(t) is time delay and satisfies
\(\zeta (t)= o (t)\) is initial value, which satisfies \(o (t)\in [-h_{m},0 ]\). \(\varDelta Z \) and \(\varDelta Z_{d} \) are uncertainty parameter matrices and meet the following conditions
E, M, and N are both constant matrices and are known. D(t) represents time-varying and
To prove the SMC method introduced in this paper, the following assumption and lemmas will be used.
Lemma 1
[22] Let R, U, and D(t) be appropriate matrices. If exists matrices \(P = P^{T}\), then
if and only if \(\lambda >0\) satisfies
Lemma 2
[30] Let \(e\in \mathbb {R}^{n}\) and \( g\in \mathbb {R}^{n}\), and then
for any \(\eta >0\).
Lemma 3
[22] For a vector function \(\phi \): \([t_{1},t_{2}]\in \mathbb {R}^{n}\) and any positive definite matrix F, we have
Lemma 4
[23] For a given symmetric matrix
where \(\varXi _{11}\in \mathbb {R}^{m\times m}\), \(\varXi _{22}\in \mathbb {R}^{n\times m} \) and \(\varXi _{12}\in \mathbb {R}^{m\times n}\), the following conditions will be of equal value
Lemma 5
[3] For any real vectors c and d, and there is a suitable dimension matrix P that satisfies \(P> 0\), the following inequality will be satisfied
Assumption 1
\(r(\zeta (t),t)\) and \(i(\zeta (t-h(t)),t)\) are both nonlinear functions, which satisfy
where \(\alpha \) and \(\beta \) are positive constants.
3 Main Results
3.1 Switching Surface
The design of SMC generally involves two steps. The first step is to introduce the SMS function q(t), which could make sure the robustness of sliding mode dynamics. The second is to introduce appropriate SMC laws to force the system state onto a predefined SMS within a finite time. Firstly, we define an integral SMS s(t) in the following
Among them, \(L\in \mathbb {R}^{m\times n} \) is selected, and \(K\in \mathbb {R}^{m\times n} \) is the controller gain matrix we designed, and LC is a nonsingular matrix.
Taking the derivative of (5), it has
When \(\dot{s}(t) = 0\), the equivalent controller is
Furthermore, by substituting (6) into (1), we can obtain
Remark 1
Compared to the SMC selected in [4], the SMS (5) contains an integral term. The integral SMS can ensure that the system only has one sliding mode stage by finding a suitable initial position, which avoids the shortcomings of traditional sliding modes in the approaching stage and ensures the robustness of the system. Therefore, the designed SMS has better anti-interference performance.
3.2 Stability Analysis
Subsequently, based on SMC, a dynamic equation for FO system is studied, which can be used to investigate the asymptotic stability of (1).
Theorem 1
Under Assumption 1. If there exist matrices \(G=G^{T}>0\), \(J>0\), and \(H>0\), and positive scalars \(\beta \), \(\epsilon _{1}\), \(\epsilon _{2}\), and \(\epsilon _{3}>0\), such that
where \( \varTheta _{11}= GZ+Z^{T}G+\epsilon _{1}M^{T}M+2\beta +H+h_{m}J\), \( \varTheta _{22}= \epsilon _{2} N^{T}N-(1-d)H\), \( \varTheta _{33}=-\frac{J}{h_{m}}\), \( \varTheta _{44}=-G\), \( \varTheta _{55}=-C^{T}GC\), \( \varTheta _{66}=-\epsilon _{1}I\), \( \varTheta _{77}=-\epsilon _{2}I\), \( \varTheta _{88}=-\epsilon _{3}I\), \( \varTheta _{12}=GZ_{d}\), \( \varTheta _{24}= Z_{d}^{T}G\), \( \varTheta _{15}=\sqrt{2}GC\), \( \varTheta _{16}=GE\), \( \varTheta _{17}=GE\), \( \varTheta _{38}=GE\), then, by choosing \(L=C^{T}G\), the sliding mode motion dynamics (7) is asymptotically stable.
Proof
We choose the Lyapunov function as
where
Taking the derivative of (11), we can conclude
where \(\kappa (t)=\sum _{k=1}^{\infty } \frac{\varGamma (1+\alpha )(D_{t}^{\alpha }\zeta (t) )^{T}GD_{t}^{\alpha -k }\zeta (t)}{\varGamma (1+k)\varGamma )(1-k+\alpha )} \).
Since the infinite term composed of fractional derivatives is a bounded set, \(\kappa (t)\) is bounded according to the definition in [14], and
According to Lemma 5 and \(L =C^{T} G\), one has
According to Lemma 2, (3) and (4), it yields
where \(\varsigma ^{T}(t)=\begin{bmatrix} \zeta (t)^{T}&\zeta \big (t-h(t)\big )^{T}&\big ( \int _{t-h(t)}^{t} \zeta (v)dv\big )^{T} \end{bmatrix} \), and
with
In the following, by Schur complement and (3), \(\varOmega _{i}<0\) can be rewritten as
where
According to Lemma 1 and Schur complement, it can easy to conclude that (24) can be obtained by LMIs (8) and (9) when \(\epsilon _{3}>0\). Therefore, system (1) is asymptotic stable if \(\varOmega _{i}< 0\). This proof has been completed. \(\square \)
3.3 Reachability Analysis
The accessibility of SMS (5) is ensured by designing a suitable adaptive SMC law as follows:
Theorem 2
For system (1) and its SMS function (5), \(L=C^{T}G\), G are solutions based on LMIs (8)–(9), then system (1) will be driven onto the designed SMS (5) by
with
where \( \varepsilon >0 \), \(\delta _{i} (t)>0\) and
constants \(\hat{\xi }\) and \(\hat{\rho }\) are unknown and can be estimated by the following equation,
\(k_{1}\) and \( k_{2} \) are both known positive constants.
Proof
The Lyapunov function is chosen
Taking derivative of \(V_{SMC}\), we have
Based (27) and Assumption 1, it gets
From (3), (4) and (30), it yields
where
According to (26), we have
Based (27), we can obtain \(\dot{\tilde{\xi }}(t)\) and \(\dot{\tilde{\rho }}(t)\) are positive. Therefore, within a finite time \(t^{*}\), \(\tilde{\xi }(t)\) and \(\tilde{\rho }(t)\) exhibit positive values. Therefore, the following conditions can be obtained
\(s^{T}(t)\dot{s}(t)<0\) can be obtained from (29) and (33), which verify the accessibility of SMS (5). \(\square \)
Remark 2
It is well known that the discontinuity of SMS is the main drawback of the SMC method, which leads to a chattering phenomenon during the control process. To avoid the chattering phenomenon, the following steps are provided: First, the SMS (5) is designed as an integral form. Second, a SMC law (25) is constructed by using the approach law method. Third, the continuous function \(\frac{s}{\left| s \right| +\sigma } \) replaces the non-continuous function \({\text {sgn}}(s(t))\). By using the above methods, the chattering phenomenon can be effectively suppressed.
4 Simulations
The feasibility of the introduced method is demonstrated by the following.
Example 1
Consider system (1) with \(\zeta (0)=[1,-1,-1]^{T}\), where \(h(t)=0.1*\sin (t)+1\), \(h_{m}=0.1\), \(d = 0.1\), \(\xi = 0.93\). The remaining parameters are chosen as
By solving LMIs (8) and (9) in Theorem 1, we can obtain
\(\epsilon _{1}=0.0022\), \(\epsilon _{2}=0.0040\), \(\epsilon _{3}=0.0038\), and the gain matrices of SMC is \(K=\begin{bmatrix} -3 &{} -1&{}-2\\ \end{bmatrix}\).
After examination, all conditions in Theorems 1 and 2 can be satisfied. Thus, system (1) can be asymptotically stable by the adaptive SMC law.

State trajectories without controller

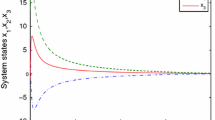
State trajectories based SMC

SMS control input in Example 1

Sliding function s(t) in Example 1
Figures 2, 4 and 5 illustrate the validity of main results. Among them, Figs. 2 and 3 show state trajectories of (1) without and with SMC controller. Figure 4 depicts the SMC input. It is not difficult to see from Fig. 2 that these system state variables are divergent. Figure 5 illustrates the reachability of the sliding function s(t) in finite-time. However, under the SMC law (25), all three state variables in the system will converge within 5 s and reach an equilibrium state.
Example 2
In this section, we provide an example based on the Chua’s circuit model proposed in [14] to demonstrate the effectiveness of the control method designed in this paper.
Among them, parameters of fractional-order systems are as follows: \(m_{0}=-\frac{1}{7} \), \(m_{1}=-\frac{2}{7} \), \(a=9\), \(b=14.28\), \(c=0.1\), \(f(\zeta _{1} (t) )=\frac{1}{2} [\left| \zeta _{1} (t)+1 \right| - \left| \zeta _{1} (t)-1 \right| ]\). Therefore,
Now solving LMIs (8) and (9), we obtain
\(\epsilon _{1}=0.0022\), \(\epsilon _{2}=0.0040\), \(\epsilon _{3}=0.0038\), and the gain matrix of SMC is \(K=\begin{bmatrix} -1 &{} 2&{}-3\\ \end{bmatrix}\).

State trajectories based SMC in Example 2

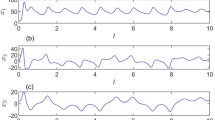
SMS control input and sliding function s(t) with \(\frac{s}{\left| s \right| +\sigma } \) in Example 2

SMS control input u(t) and sliding function s(t) with \({\text {sgn}}(s(t))\) in Example 2
After examination, all conditions in Theorems 1 and 2 can be satisfied. Thus, system (34) can be asymptotically stable by the adaptive SMC law. Figures 6 and 7 illustrate the validity of main results. Among them, Fig. 6 shows state trajectories of (34) with SMC controller. Figure 7 depicts the SMC input and the reachability of the sliding function s(t) in finite-time.
In Example 2, when the continuous function \(\frac{s}{\left| s \right| +\sigma } \) in (25) is replaced by the signed function \({\text {sgn}}(s(t))\), Fig. 8 is obtained, which shows the control input u(t) and the sliding surface function s(t). From Fig. 8, it can be seen that there is a clear oscillation process in the state trajectory. Compared with Fig. 8, the continuous function \(\frac{s}{\left| s \right| +\sigma } \) used in Fig. 7 can significantly reduce the oscillation of the system, which indicates that the method proposed in this article is effective.
5 Conclusion
This paper introduces a novel dynamic model for FO systems with time delay and uncertainty. Firstly, a suitable integral-type SMS is designed, which can avoid the shortcomings of traditional sliding modes in the approaching stage and better ensure system performance. Secondly, under the guidance of the Lyapunov stability theory, it is not difficult to conclude that the FO system under SMC has asymptotic stability. Then, the adaptive SMC laws can force it to be driven to the designated SMS and avoid chattering during the sliding mode process. Finally, the effectiveness of the control technology is verified through an example.
Data Availability Statement
Data sharing is not applicable to this article as no data sets were generated or analyzed during the current study.
References
L. Chen, W. Guo, P. Gu, A.M. Lopes, Z. Chu, Y. Chen, Stability and stabilization of fractional-order uncertain nonlinear systems with multiorder. IEEE Trans. Circuits Syst. Express Br. 70(2), 576–580 (2023)
L. Chen, M. Xue, A.M. Lopes, R. Wu, X. Zhang, Y. Chen, New synchronization criterion of incommensurate fractional-order chaotic systems. IEEE Trans. Circuits Syst. Express Br. 71(1), 455–459 (2024)
Q. Chen, D. Tong, W. Zhou, Y. Xu, J. Mou, Exponential stability using sliding mode control for stochastic neutral-type systems. Circuits, Syst. Signal Process. 40, 2006–2024 (2021)
C. Deng, R. Ling, Y. Fu, D. Li, Second-order sliding-mode controller for boost converters with load estimation and compensation. IEEE Trans. Ind. Appl. 59(5), 6167–6181 (2023)
H. Dong, X. Yang, H. Gao, X. Yu, Practical terminal sliding-mode control and its applications in servo systems. IEEE Trans. Ind. Electron. 70(1), 752–761 (2023)
F. Du, J.G. Lu, Finite-time synchronization of fractional-order delayed fuzzy cellular neural networks with parameter uncertainties. IEEE Trans. Fuzzy Syst. 31(6), 1769–1779 (2023)
S. He, J. Song, F. Liu, Robust finite-time bounded controller design of time-delay conic nonlinear systems using sliding mode control strategy. IEEE Trans. Syst. Man Cybern. Syst. 48(11), 1863–1873 (2017)
Z. Ke, J. Wang, B. Hu, Z. Peng, C. Zhang, X. Yin, Y. Dai, Fractional-order model predictive control with adaptive parameters for power converter. IEEE Trans. Emerg. Sel. Top. Power Electron. 11(3), 2650–2660 (2023)
B. Liang, S. Zheng, C.K. Ahn, F. Liu, Adaptive fuzzy control for fractional-order interconnected systems with unknown control directions. IEEE Trans. Fuzzy Syst. 30(1), 75–87 (2022)
P. Liu, J. Wang, Z. Zeng, Event-triggered synchronization of multiple fractional-order recurrent neural networks with time-varying delays. IEEE Trans. Neural Netw. Learn. Syst. 34(8), 4620–4630 (2023)
W. Liu, Y. Wang, Passivity-based sliding mode control for Lur’e singularly perturbed time-delay systems with input nonlinearity. Circuits, Syst. Signal Process. 41(11), 6007–6030 (2022)
B. Ma, D. Tong, Q. Chen, W. Zhou, Y. Wei, Finite-time synchronization of multi-weighted fractional-order coupled neural networks with fixed and adaptive couplings. Int. J. Adapt. Control Signal Process. 36(10), 2364–2382 (2022)
Z. Ma, Z. Liu, P. Huang, Z. Kuang, Adaptive fractional-order sliding mode control for admittance-based telerobotic system with optimized order and force estimation. IEEE Trans. Ind. Electron. 69(5), 5165–5174 (2021)
K. Mathiyalagan, G. Sangeetha, Second-order sliding mode control for nonlinear fractional-order systems. Appl. Math. Comput. 383, 125264 (2020)
C.A. Monje, B. Deutschmann, J. Muñoz, C. Ott, C. Balaguer, Fractional order control of continuum soft robots: Combining decoupled/reduced-dynamics models and robust fractional order controllers for complex soft robot motions. IEEE Control Syst. Mag. 43(3), 66–99 (2023)
K. Shao, J. Zheng, H. Wang, F. Xu, X. Wang, B. Liang, Recursive sliding mode control with adaptive disturbance observer for a linear motor positioner. Mech. Syst. Signal Process. 146, 107014 (2021)
M. Shi, D. Tong, Q. Chen, W. Zhou, Pth moment exponential synchronization for delayed multi-agent systems with Lévy noise and Markov switching. IEEE Trans. Circuits Syst. Express Br. 71(2), 697–701 (2023)
D. Tong, B. Ma, Q. Chen, Y. Wei, P. Shi, Finite-time synchronization and energy consumption prediction for multilayer fractional-order networks. IEEE Trans. Circuits Syst. Express Br. 70(6), 2176–2180 (2023)
D. Tong, C. Xu, Q. Chen, W. Zhou, Sliding mode control of a class of nonlinear systems. J. Frankl. Inst. 357(3), 1560–1581 (2020)
D. Tong, C. Xu, Q. Chen, W. Zhou, Y. Xu, Sliding mode control for nonlinear stochastic systems with Markovian jumping parameters and mode-dependent time-varying delays. Nonlinear Dyn. 100, 1343–1358 (2020)
R. Venkateswaran, A.A. Yesudhas, S.R. Lee, Y.H. Joo, Integral sliding mode control for extracting stable output power and regulating DC-link voltage in PMVG-based wind turbine system. Int. J. Electr. Power Energy Syst. 144, 108482 (2023)
C. Wang, X. Zhou, X. Shi, Y. Jin, Delay-dependent and order-dependent LMI-based sliding mode H\(\infty \) control for variable fractional order uncertain differential systems with time-varying delay and external disturbance. J. Frankl. Inst. 359(15), 7893–7912 (2022)
Y. Wang, X. Wen, Y. Cao, C. Xu, F. Gao, Bearing-based relative localization for robotic swarm with partially mutual observations. IEEE Robot. Autom. Lett. 8(4), 2142–2149 (2023)
Z.B. Wang, D.Y. Liu, D. Boutat, X. Zhang, P. Shi, Nonasymptotic fractional derivative estimation of the pseudo-state for a class of fractional-order partial unknown nonlinear systems. IEEE Trans. Cybern. 53(11), 7392–7405 (2023)
Y. Wei, L. Zhao, J. Lu, F.E. Alsaadi, J. Cao, LMI stability condition for delta fractional order systems with region approximation. IEEE Trans. Circuits Syst. Regul. Pap. 70(9), 3735–3745 (2023)
J. Xiao, S. Zhong, S. Wen, Unified analysis on the global dissipativity and stability of fractional-order multidimension-valued memristive neural networks with time delay. IEEE Trans. Neural Netw. Learn. Syst. 33(10), 5656–5665 (2021)
J. Xiong, J. Zhang, Z. Xu, Z. Din, Y. Zheng, Active power decoupling control for pwm converter considering sensor failures. IEEE Trans. Emerg. Sel. Top. Power Electron. 11(2), 2236–2245 (2023)
C. Xu, D. Tong, Q. Chen, W. Zhou, P. Shi, Exponential stability of Markovian jumping systems via adaptive sliding mode control. IEEE Trans. Syst. Man Cybern. Syst. 51(2), 954–964 (2021)
G. Yang, D. Tong, Q. Chen, W. Zhou, Fixed-time synchronization and energy consumption for Kuramoto-oscillator networks with multilayer distributed control. IEEE Trans. Circuits Syst. Express Br. 70(4), 1555–1559 (2023)
J. Yang, W. Zhou, P. Shi, X. Yang, X. Zhou, H. Su, Synchronization of delayed neural networks with Lévy noise and Markovian switching via sampled data. Nonlinear Dyn. 81, 1179–1189 (2015)
G. Zhang, D. Tong, Q. Chen, W. Zhou, Sliding mode control against false data injection attacks in DC microgrid systems. IEEE Syst. J. 17(4), 6159–6168 (2023)
S. Zou, J. Song, O. Abdelkhalik, A sliding mode control for wave energy converters in presence of unknown noise and nonlinearities. Renew. Energ. 202, 432–441 (2023)
Acknowledgements
This work is partially supported by the Guangxi Natural Science Foundation (2023GXNSFAA026104).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
Authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ren, Z., Tong, D., Chen, Q. et al. Sliding Mode Control for Uncertain Fractional-Order Systems with Time-Varying Delays. Circuits Syst Signal Process 43, 3979–3995 (2024). https://doi.org/10.1007/s00034-024-02643-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-024-02643-z