
Abstract
This paper is concerned with the problem of H ∞ control for uncertain two-dimensional (2-D) state delay systems described by the Roesser model. Based on a summation inequality, a sufficient condition to have a delay-dependent H ∞ noise attenuation for this 2-D system is given in terms of linear matrix inequalities (LMIs). A delay-dependent optimal state feedback H ∞ controller is obtained by solving an LMI optimization problem. Finally, a simulation example of thermal processes is given to illustrate the effectiveness of the proposed results.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Two-dimensional(2-D) systems have received considerable attention due to their extensive applications of both theoretical and practical interest in the past several decades [5, 9, 14]. The key feature of a 2-D system is that the information is propagated along two independent directions. Many physical processes, such as image processing [1], signal filtering [8], and thermal processes in chemical reactors, heat exchangers and pipe furnaces [9], have a clear 2-D structure. The 2-D system theory is frequently used as an analysis tool to solve some problems, e.g., iterative learning control [7, 11] and repetitive process control [4, 16]. However, the analysis and synthesis approaches for 2-D systems can not simply extend from existing standard (1-D) system theories because there are many 2-D system phenomena which have no 1-D system counterparts. Thus the study of 2-D systems is an interesting and challenging topic, and a lot of results have been published in the literature. Among these results, Hinamoto [6] established a sufficient condition of the asymptotic stability for 2-D systems, Chen et al. [2] investigated the problem of stability analysis and stabilization for 2-D discrete fuzzy systems via basis-dependent Lyapunov functions, Sebek [15] first addressed the H ∞ control problem for 2-D systems, Du and Xie [3] presented a linear matrix inequality approach to establish several versions of 2-D bounded real lemma.
Delay systems represent a class of infinite dimensional systems largely used to describe propagation and transport phenomena [10]. In some physical processes which are intrinsically 2-D characteristic, delays appear in a natural way since information transmission along time and/or space requires the process of spreading, the presence of delays in a controlled process can also simplify the corresponding process model. Therefore, the control problem for 2-D state delay systems has received some attention. Paszke et al. [12] presented a sufficient stability condition and a stabilization method for linear 2-D discrete state delay systems. Xu et al. [17] proposed an approach to design the optimal H ∞ controller for 2-D discrete state delay systems. However, the above mentioned results on 2-D discrete state delay systems mainly adopted the delay-independent methods, and are more conservative since the delay usually possesses an upper bound in practice. It is worth addressing the delay-dependent stability and H ∞ control problems of 2-D discrete state-delayed systems when the upper bound of the delay can be measured. Xu et al. [18] and Peng et al. [13], respectively, devised a delay-dependent H ∞ state feedback control method and a delay-dependent H ∞ output feedback control method for 2-D state-delayed systems described by the Fornasini–Marchesini (FM) second model. There are no delay-dependent H ∞ control results for 2-D systems in the Roesser model.
In this paper, we first propose a delay-dependent approach to investigate the H ∞ control problem for 2-D discrete state delay systems in the Roesser model. Based on a summation inequality, a sufficient condition for such a system to have a delay-dependent specified H ∞ noise attenuation is also obtained by using LMI approaches, and the condition for the existence of H ∞ controllers is obtained in terms of an LMI. An LMI convex optimization problem is formulated to design a delay-dependent optimal state feedback H ∞ controller. Finally, a simulation example of thermal processes with state delay is given to demonstrate the effectiveness of the proposed results.
2 H ∞ Performance Analysis
Consider an uncertain 2-D discrete linear system with state delay described by the following Roesser model:


where 0⩽i,j∈Z (where Z denotes a set of integers) are horizontal and vertical coordinates, \(x^{h}(i,j)\in\Re^{n_{1}}\) and \(x^{v}(i,j)\in\Re^{n_{2}}\) are the state vectors, u(i,j)∈ℜm is the input vector, z(i,j)∈ℜp is the noise input which belongs to ℓ 2{[0,∞),[0,∞)}, d 1 and d 2 are unknown positive integers representing delays along horizontal direction and vertical direction, respectively; A, \(A_{d_{1}}\), \(A_{d_{2}}\), B 1, B 2, H and L are constant matrices with appropriate dimensions. The initial condition is defined as follows:

For the 2-D system (1a)–(1b), assume a finite set of initial conditions, i.e., there exist positive integers L 1 and L 2, such that
Denoting \(x(i,j)=[x^{h^{\mathrm{T}}}(i,j) x^{v^{\mathrm{T}}}(i,j)]^{\mathrm{T}}\) and X r =sup{∥x(i,j)∥:i+j=r,i,j∈Z}, we first introduce the definition of asymptotic stability for the 2-D system (1a)–(1b).
Definition 1
The 2-D discrete state delay system (1a)–(1b) is asymptotically stable if lim r→∞ X r =0 with u(i,j)=0, w(i,j)=0 and the initial condition (3).
In order to address the issue of the delay-dependent H ∞ performance, we first define vectors \(t^{h}(i,j)\in\Re^{n_{1}}\) and \(t^{v}(i,j)\in\Re^{n_{2}}\), such that
and introduce the following lemma.
Lemma 1
[18]
For any matrices M 1,M 2∈ℜn×n and 0<X∈ℜn×n, and any integer d⩾0, the following summation inequality holds:

where
Definition 2
Consider the uncertain 2-D system (1a)–(1b) with zero input u(i,j)=0 and the initial condition (3). Given a scalar γ>0, integers \(d_{1}^{*}>0\), \(d_{2}^{*}>0\), and symmetric positive definite weighting matrices Q h , \(W_{h}\in\Re^{n_{1}\times n_{1}}\) and Q v , \(W_{v}\in\Re^{n_{2}\times n_{2}}\), the 2-D discrete state delay system (1a)–(1b) with any delays d 1 and d 2 satisfying \(0< d_{1}\leqslant d_{1}^{*}\) and \(0< d_{2}\leqslant d_{2}^{*}\) is said to have an H ∞ noise attenuation γ if it is asymptotically stable and satisfies
where

The following theorem presents a sufficient condition for the 2-D discrete state delay system (1a)–(1b) with \(0< d_{1}\leqslant d_{1}^{*}\) and \(0< d_{2}\leqslant d_{2}^{*}\) to have a specified H ∞ noise attenuation.
Theorem 1
Given a scalar γ>0 and integers \(d_{1}^{*}>0\) and \(d_{2}^{*}>0\), the 2-D discrete state delay system (1a)–(1b) with u(i,j)=0, \(0< d_{1}\leqslant d_{1}^{*}\), \(0< d_{2}\leqslant d_{2}^{*}\) and the initial condition (3) has an H ∞ noise attenuation γ if there exist matrices \(M_{11}\in\Re^{n_{1}\times n_{1}}\), \(M_{12}\in\Re^{n_{1}\times n_{1}}\), \(M_{21}\in\Re^{n_{2}\times n_{2}}\), \(M_{22}\in\Re^{n_{2}\times n_{2}}\), and symmetric positive definite matrices \(P_{h}\in\Re^{n_{1}\times n_{1}}\), \(P_{v}\in\Re^{n_{2}\times n_{2}}\), \(R_{h}\in\Re^{n_{1}\times n_{1}}\), \(R_{v}\in\Re^{n_{2}\times n_{2}}\), satisfying 0<P h <γ 2 Q h , 0<P v <γ 2 Q v , 0<R h <γ 2 W h , 0<R v <γ 2 W v and

where

Proof
Define the following Lyapunov–Krasovskii functional for the 2-D system (1a)–(1b):
where

and P h >0, P v >0, R h >0, R v >0. It is clear that V(x(i,j)) is positive. Along any trajectory of the system (1a)–(1b) with u(i,j)=0 and w(i,j)=0 the increment △V(x(i,j)) is given by

Using (4), we have

Applying Lemma 1, we have the following summation inequalities:

and

Substituting (10)–(12) into (9), applying the Schur complement, it follows from the LMI (7) that
holds for any delays d 1 and d 2 satisfying \(0 < d_{1}\leqslant d_{1}^{*}\) and \(0 < d_{2} \leqslant d_{2}^{*}\), where the equality sign holds only when x(i,j)=0.
Let D(r) denote the set defined by
For any integer r⩾max{L 1,L 2}, it follows from (13) and the initial condition (3) that

where the equality sign holds only when
This implies that the whole energies stored at the points {(i,j):i+j=r+1} is strictly less than those at the points {(i,j):i+j=r} unless all x(i,j)=0. Thus, we obtain
It follows that

Consequently, we conclude from Definition 1 that the 2-D discrete state delay system (1a)–(1b) is asymptotically stable for any delays d 1 and d 2 satisfying \(0 < d_{1}\leqslant d_{1}^{*}\) and \(0 < d_{2} \leqslant d_{2}^{*}\).
To establish the H ∞ performance of the 2-D system (1a)–(1b) with the control input u(i,j)=0 for w(i,j)∈ℓ 2{[0,∞),[0,∞)}, it follows from the LMI (7) such that
Therefore, for any integers T 1,T 2>0, we have

where

For T 1⩾T 2⩾max{L 1+d 1,L 2+d 2}, it follows from (13) and the initial condition (3) that

Above, the fact that

has been used.
When T 1,T 2→∞, it follows from (17)–(19) that

and

Since 0<P h <γ 2 Q h , 0<P v <γ 2 Q v , 0<R h <γ 2 W h and 0<R v <γ 2 W v , it follows from Definition 2 that the result of this theorem is true. This completes the proof. □
In the case when the initial condition is known to be zero, i.e., X(0)=0, for all non-zero w(i,j), we have
It follows from the 2-D Parseval’s theorem [3] that (21) is equivalent to
where σ max(⋅) denotes the maximum singular value of the corresponding matrix, and
is the transfer function from the noise input w(i,j) to the controlled output z(i,j) for the 2-D system (1a)–(1b).
3 H ∞ Controller Design
Consider the 2-D state delay system (1a)–(1b) and the following controller:
The corresponding closed-loop system is given by


If there the controller (24) exists such that the closed-loop system (25a)–(25b) is asymptotically stable, and the H ∞ norm of the transfer function (23) from the noise input w(i,j) to the controlled output z(i,j) for the closed-loop system (25a)–(25b) is smaller than γ, then the closed-loop system (25a)–(25b) has a specified H ∞ noise attenuation γ, and the controller (24) is said to be a γ-suboptimal H ∞ state feedback controller for the 2-D state delay system (1a)–(1b) with any state delays d 1 and d 2 satisfying \(0 < d_{1}\leqslant d_{1}^{*}\) and \(0 < d_{2} \leqslant d_{2}^{*}\).
Theorem 2
Given a scalar γ>0 and positive integers \(d_{1}^{*}\) and \(d_{2}^{*}\), if there exist matrices N 11, \(N_{12}\in\Re^{n_{1}\times n_{1}}\), N 21, \(N_{22}\in\Re^{n_{2}\times n_{2}}\), \(N_{1}\in\Re^{m\times n_{1}}\) and \(N_{2}\in\Re^{m\times n_{2}}\), and symmetric positive definite matrices \(\bar{P}=\operatorname{diag}\{\bar{P}_{h},\bar{P}_{v}\}\), \(\bar{R}=\operatorname{diag}\{\bar{R}_{h},\bar{R}_{v}\}\) (where \(\bar{P}_{h}, \bar{R}_{h}\in\Re^{n_{1}\times n_{1}}\) and \(\bar{P}_{v}, \bar{R}_{v}\in\Re^{n_{2}\times n_{2}}\)), such that

where

then the closed-loop system (25a)–(25b) with \(0 < d_{1}\leqslant d_{1}^{*}\) and \(0 < d_{2} \leqslant d_{2}^{*}\) and the zero initial condition (3) has a specified H ∞ noise attenuation γ, and \(u(i, j ) = [N_{1},N_{2}] \bar{P}x(i, j )\) is a γ-suboptimal state feedback H ∞ controller for the 2-D discrete state delay system (1a)–(1b).
Proof
By applying Theorem 8 and the Schur complement, a sufficient condition for the closed-loop system (25a)–(25b) to have a specified H ∞ noise attenuation γ is that there exist matrices M 11,M 12,M 21,M 22, and symmetric positive definite matrices P h , P v , R h , R v , such that

where

It follows from (27) that M 12 and M 22 are reversible. Introducing

pre- and post-multiplying the matrix inequality (27) by the matrix \(\operatorname{diag}\{\varPhi^{\mathrm{T}},I, I,I, I, d_{1}^{*}I,d_{2}^{*}I,d_{1}^{*}R_{h}^{-1},d_{2}^{*}R_{v}^{-1}\}\) and \(\operatorname{diag}\{\varPhi,I,I,I,I, d_{1}^{*}I,d_{2}^{*}I,d_{1}^{*}R_{h}^{-1},d_{2}^{*}R_{v}^{-1}\}\) and denoting \(\bar{P}_{h}=P_{h}^{-1}\), \(\bar{P}_{v}=P_{v}^{-1}\), \(\bar{R}_{h}=R_{h}^{-1}\), \(\bar{R}_{v}=R_{v}^{-1}\), \(N_{11}=M_{12}^{-1}M_{11}P_{h}^{-1}\), \(N_{12}=M_{12}^{-1}\), \(N_{21}=M_{22}^{-1}M_{21}P_{v}^{-1}\), \(N_{22}=M_{22}^{-1}\), \(N_{1}=K_{1}\bar{P}_{h}\) and \(N_{2}=K_{2}\bar{P}_{v}\), we see that the matrix inequality (27) is equivalent to the LMI (26). It follows from Theorem 8 that the claim of this theorem is true. This completes the proof. □
Furthermore, an optimization problem can be formulated in
which minimizes the H ∞ noise attenuation γ of the resulting closed-loop system.
4 An Illustrative Example
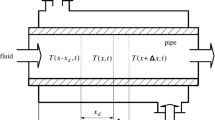
This section applies the main results on H ∞ control to the thermal process of a heat exchanger [9] shown in Fig. 1, which can be expressed in the partial differential equation

where T(x,t) is usually the temperature at x (space) ∈[0,x f ] and t (time) ∈[0,∞], u(x,t) is a given force function, τ is the time delay, x d is the space delay, a 0, a 1, a 2, b are real coefficients.

The heat exchanger
Taking

we write (29) in the form

Denoting x h(i,j)=T(i−1,j), x v(i,j)=T(i,j), d 1=int(x d /△x) and d 2=int(τ/△t+1) (where int(⋅) is the integer function), it is easy to verify that (30) can be converted into the Roesser model (1a)–(1b) with parameter matrices

Let △t=0.1, △x=0.4, a 0=1, a 1=0.3, a 2=0.4, b=1 and the initial state satisfies the condition (3) for L 1=10 and L 2=10. Considering there exists a disturbance w(i,j) during the thermal exchanging process, the output signal z(i,j) is given to evaluate H ∞ disturbance attenuation performance, the thermal process is modeled in the form (1a)–(1b) with
Solving the optimization problem (28), when \(d_{1}^{*}=3\) and \(d_{2}^{*}=3\), we can obtain a H ∞ disturbance attenuation γ=0.6728 and a delay-dependent H ∞ controller
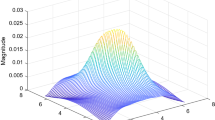
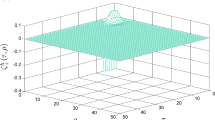
When d 1=3 and d 2=3, the frequency response \(G(e^{j\omega_{1}},e^{j\omega_{2}})\) from the noise input w(i,j) to the controlled output z(i,j) is shown in Fig. 2, and its maximum value is 0.6564 that is smaller than γ.

The frequency response \(G(e^{j\omega_{1}},e^{j\omega_{2}})\)
5 Conclusions
This paper has presented a solution to the problem of delay-dependent H ∞ control for 2-D state delay systems described by the Roesser model. Based on the summation inequality for 2-D discrete systems, a sufficient condition for this 2-D system to have delay-dependent H ∞ noise attenuation is proposed in terms of LMIs. Introducing variable substitution, a controller synthesis condition is given in terms of an LMI. A delay-dependent optimal state feedback H ∞ controller is obtained by solving an LMI optimization problem. Finally, a thermal process to serve as a simulation example of 2-D discrete state delay systems is given to illustrate the effectiveness of the proposed results.
References
R.N. Bracewell, Two-dimensional Imaging. Prentice-Hall Signal Processing Series (Prentice-Hall, Englewood Cliffs, 1995)
X. Chen, J. Lam, H. Gao, S. Zhou, Stability analysis and control design for 2-D fuzzy systems via basis-dependent Lyapunov functions. Multidimens. Syst. Signal Process. (2011). doi:10.1007/s11045-011-0166-z
C. Du, L. Xie, H ∞ Control and Filtering of Two-dimensional Systems. Lecture Notes in Control and Information Sciences, vol. 278 (Springer, Berlin, 2002)
M. Dymkov, I. Gaishun, K. Galkowski, E. Rogers, D.H. Owens, Exponential stability of discrete linear repetitive processes. Int. J. Control 75(12), 861–869 (2002)
E. Fornasini, G. Marchesini, Doubly indexed dynamical, statespace models and structural properties. Math. Syst. Theory 1(1), 59–72 (1978)
T. Hinamoto, Stability of 2-D discrete systems described by the Fornasini–Marchesini second model. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 44(3), 254–257 (1997)
X.D. Li, J.K.L. Ho, T.W.S. Chow, Iterative learning control for linear time-variant discrete systems based on 2-D system theory. IEEE Proc. Control Theory Appl. 152(1), 13–18 (2005)
W.S. Lu, A. Antoniou, Two-dimensional Digital Filters. Electrical Engineering and Electronics, vol. 80 (Dekker, New York, 1992)
T. Kaczorek, Two-dimensional Linear Systems. Lecture Notes in Control and Information Sciences, vol. 68 (Springer, Berlin, 1985)
S.I. Niculescu, Delay Effects on Stability: a Robust Control Approach (Springer, London, 2001)
D.H. Owens, N. Amann, E. Rogers, M. French, Analysis of linear iterative learning control schemes—a 2D systems/repetitive processes approach. Multidimens. Syst. Singnal Process. 11(1–2), 125–177 (2000)
W. Paszke, J. Lam, K. Galkowski, S. Xu, Z. Lin, Robust stability and stabilisation of 2D discrete state-delayed systems. Syst. Control Lett. 51(3–4), 277–291 (2004)
D. Peng, X. Guan, Output feedback H ∞ control for 2-D state delayed systems. Circuits Syst. Signal Process. 28(1), 147–167 (2009)
R.P. Roesser, A discrete state-space model for linear image processing. IEEE Trans. Autom. Control 20(1), 1–20 (1975)
M. Sebek, H ∞ problem of 2-D systems, in European Control Conference, (1993), 1476–1479
B. Sulikowski, K. Galkowski, E. Rogers, D.H. Owens, Output feedback control of discrete linear repetitive processes. Automatica 40(12), 2167–2173 (2004)
J. Xu, L. Yu, H ∞ control of 2-D discrete state delay systems. Int. J. Control. Autom. Syst. 4(4), 516–523 (2006)
J. Xu, L. Yu, Delay-dependent H ∞ control for 2-D discrete state delay systems in the second FM model. Multidimens. Syst. Signal Process. 20(4), 333–349 (2009)
Acknowledgements
This work is supported in part through National Natural Science Foundation of China (Grant No. 61075062, 61273116), Natural Science Foundation of Zhejiang Province (Grant No. LZ12E07003, Y1090805).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Xu, J., Nan, Y., Zhang, G. et al. Delay-dependent H ∞ Control for Uncertain 2-D Discrete Systems with State Delay in the Roesser Model. Circuits Syst Signal Process 32, 1097–1112 (2013). https://doi.org/10.1007/s00034-012-9507-x
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-012-9507-x